
A Forest Fire Detection System Based on Ensemble Learning




Abstract
:1. Introduction
2. Materials and Methods
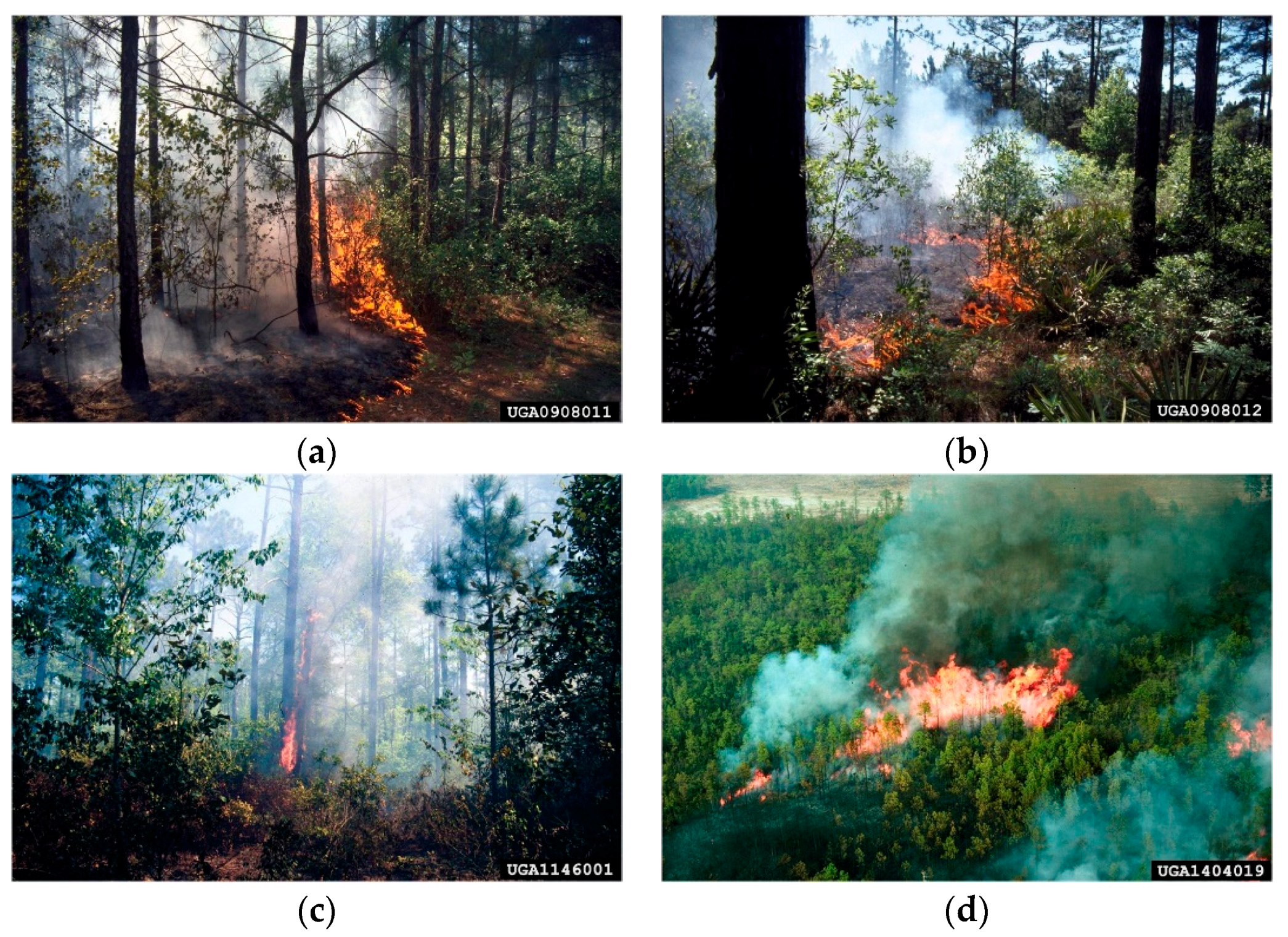
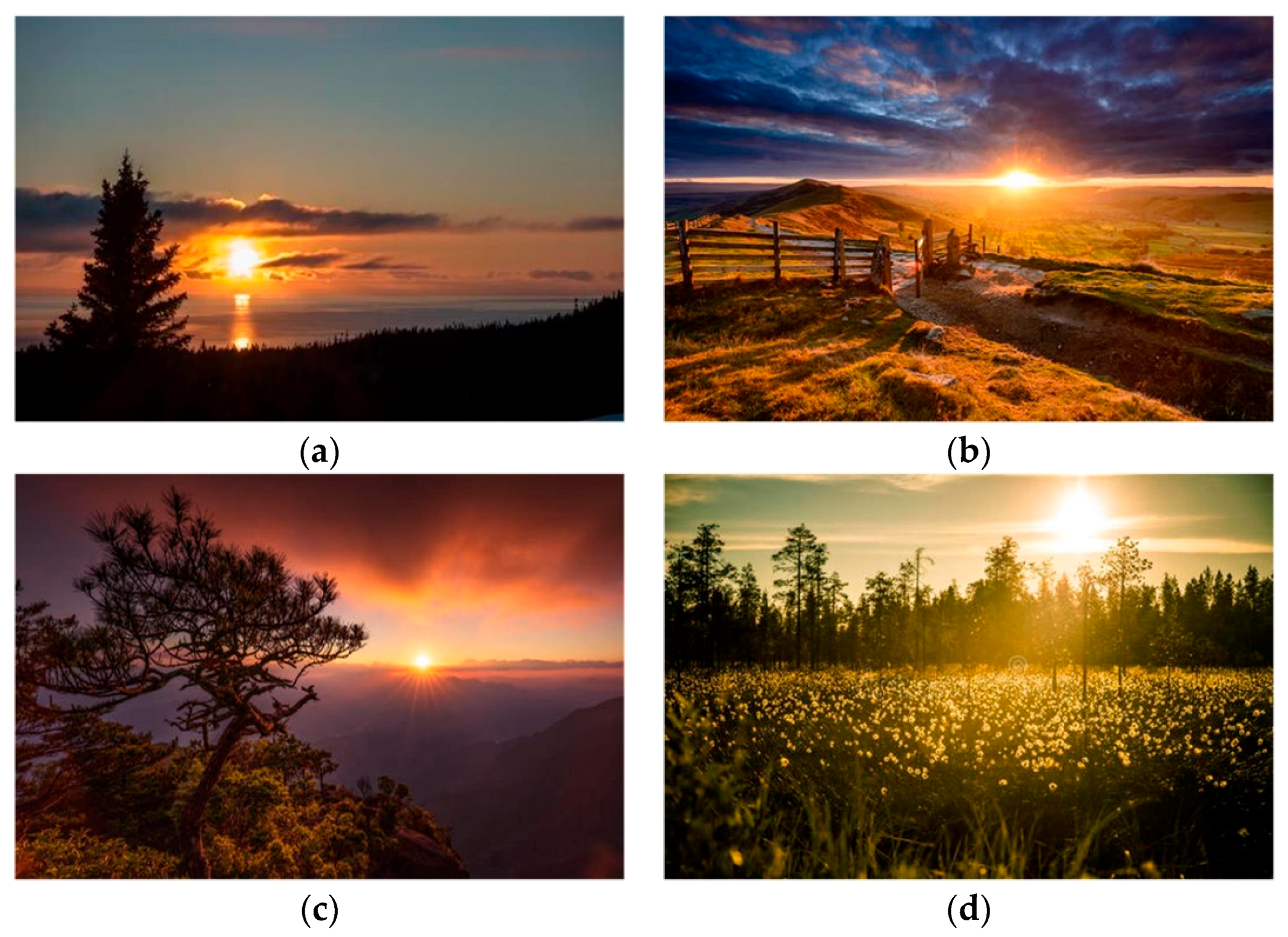
2.1. Datasets
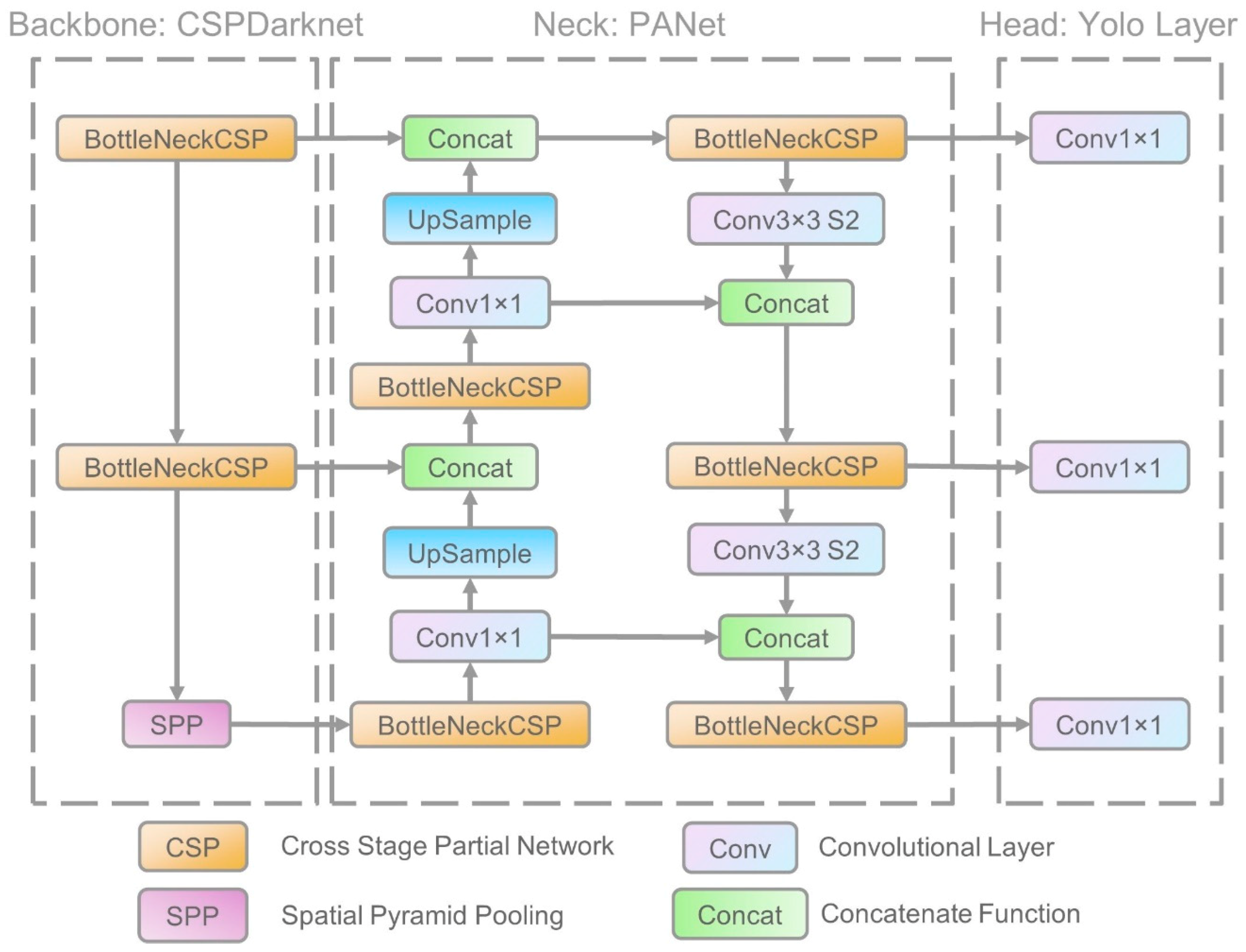
2.2. Yolov5
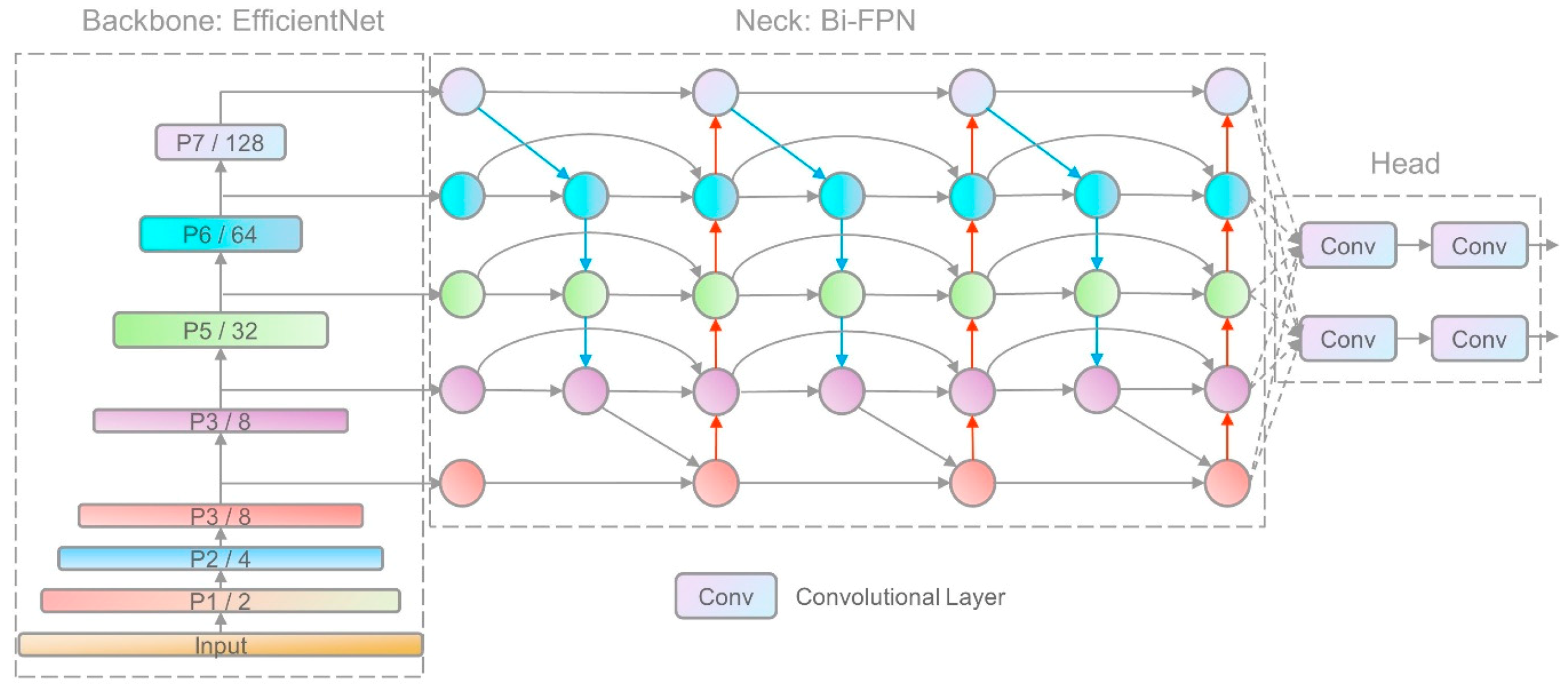
2.3. EfficientDet
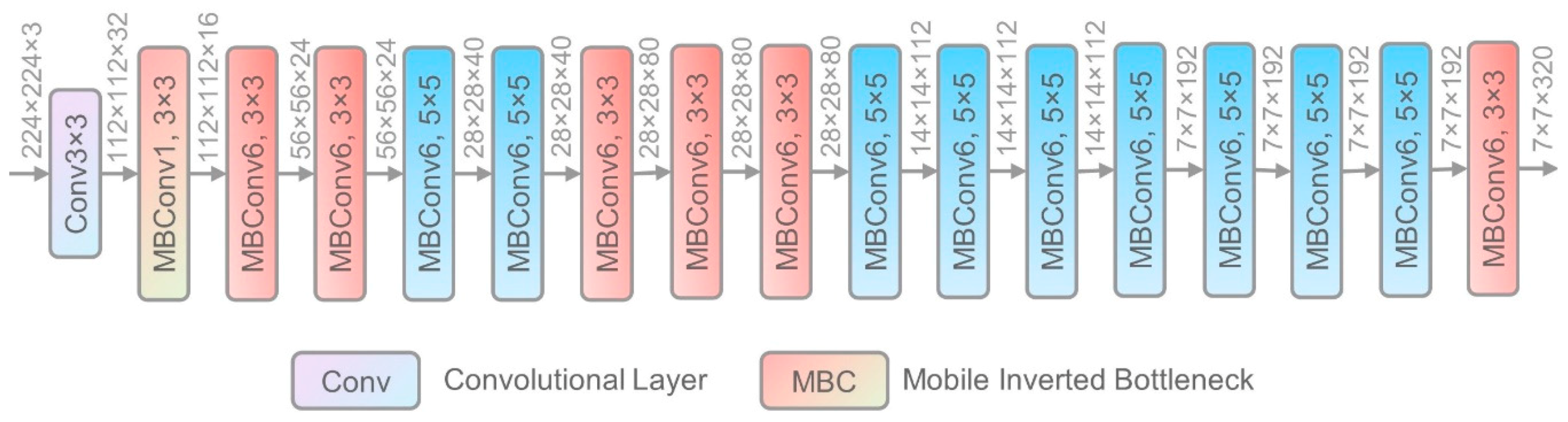
2.4. EfficientNet
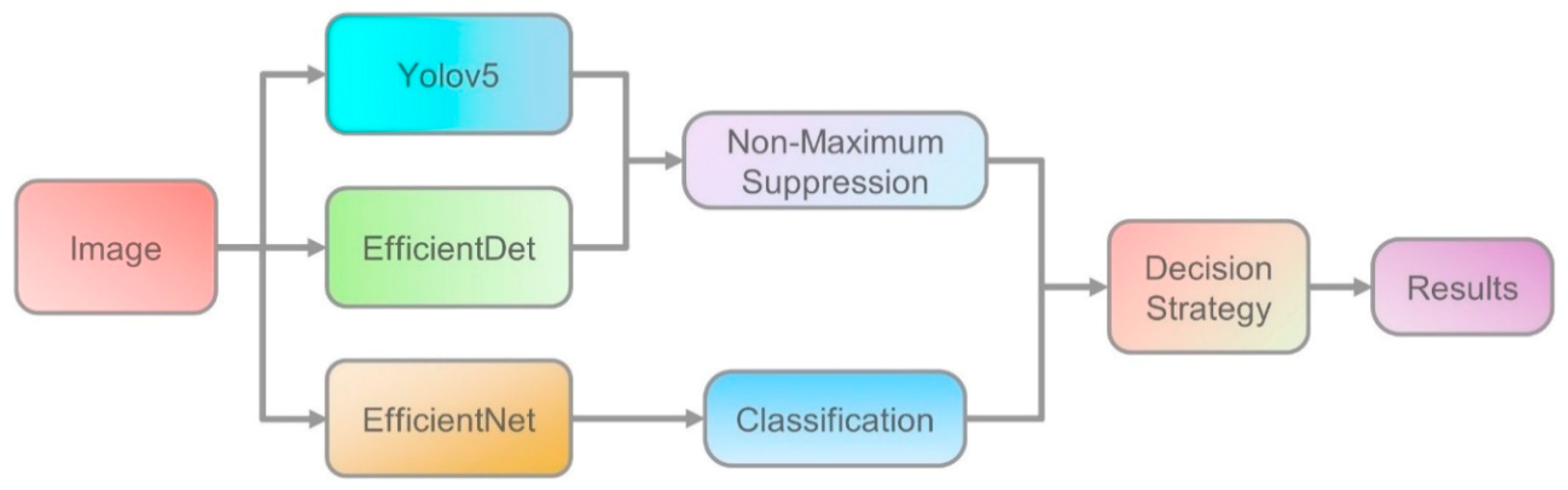
2.5. Our Model
| Algorithm 1. Non-Maximum Suppression (NMS) |
| INPUT: , is the list of initial detection boxes contains corresponding detection scores is the NMS threshold |
| Begin: whiledo |
| for in do if then end end |
| end |
| Return End |
2.6. Model Evaluation
3. Results
3.1. Training
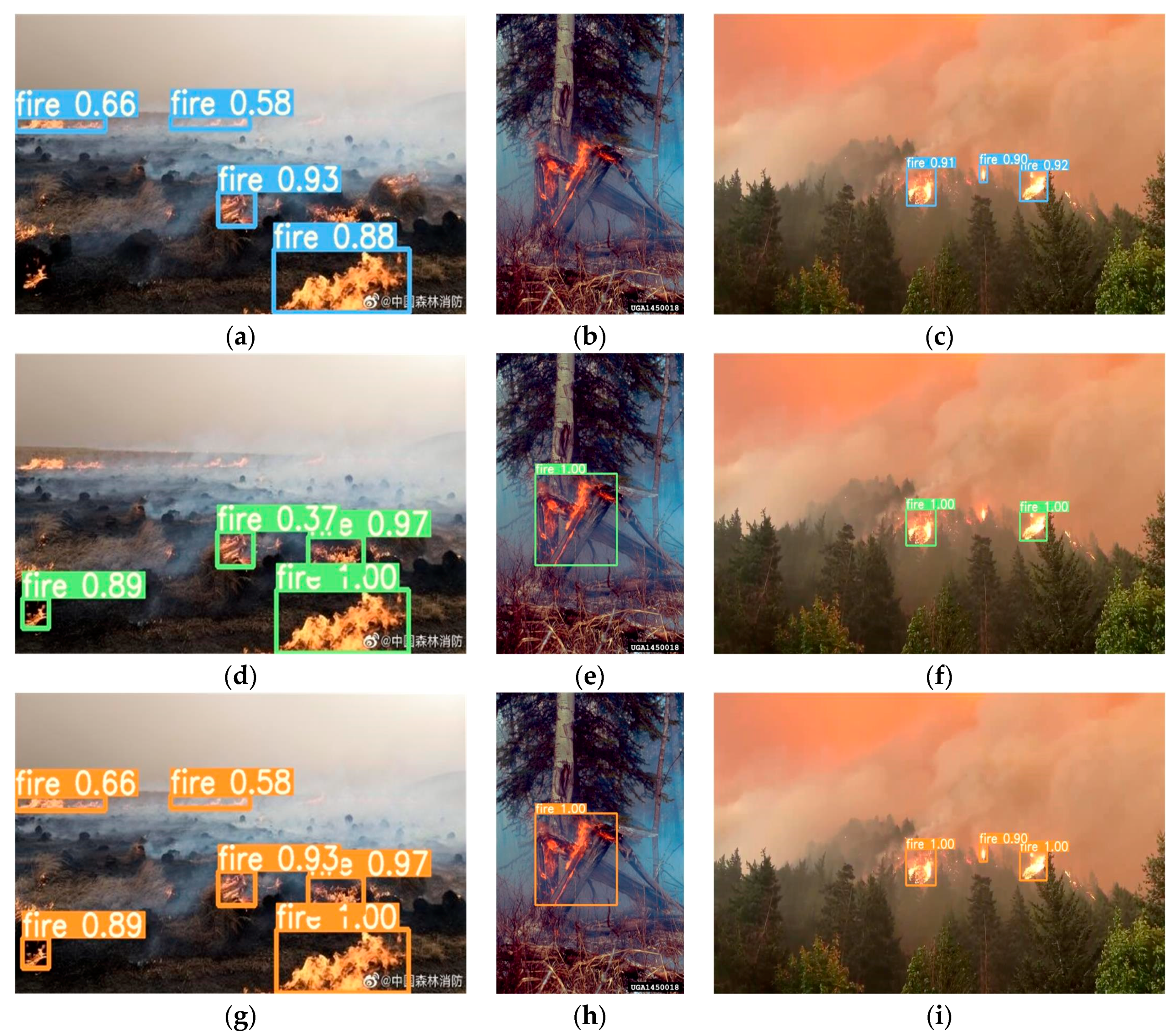
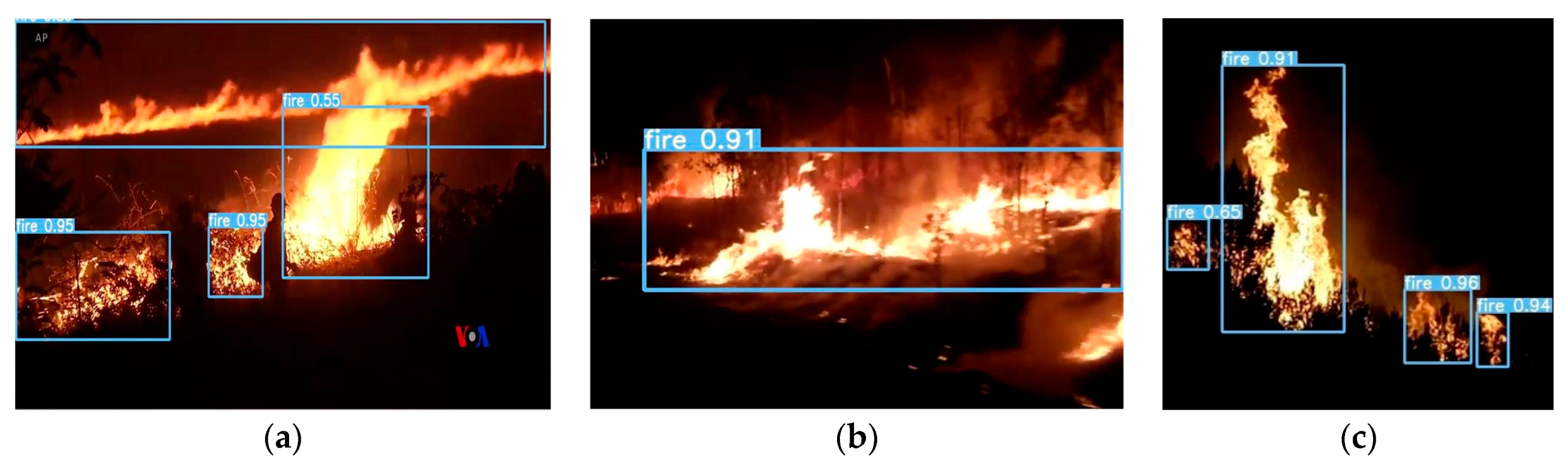
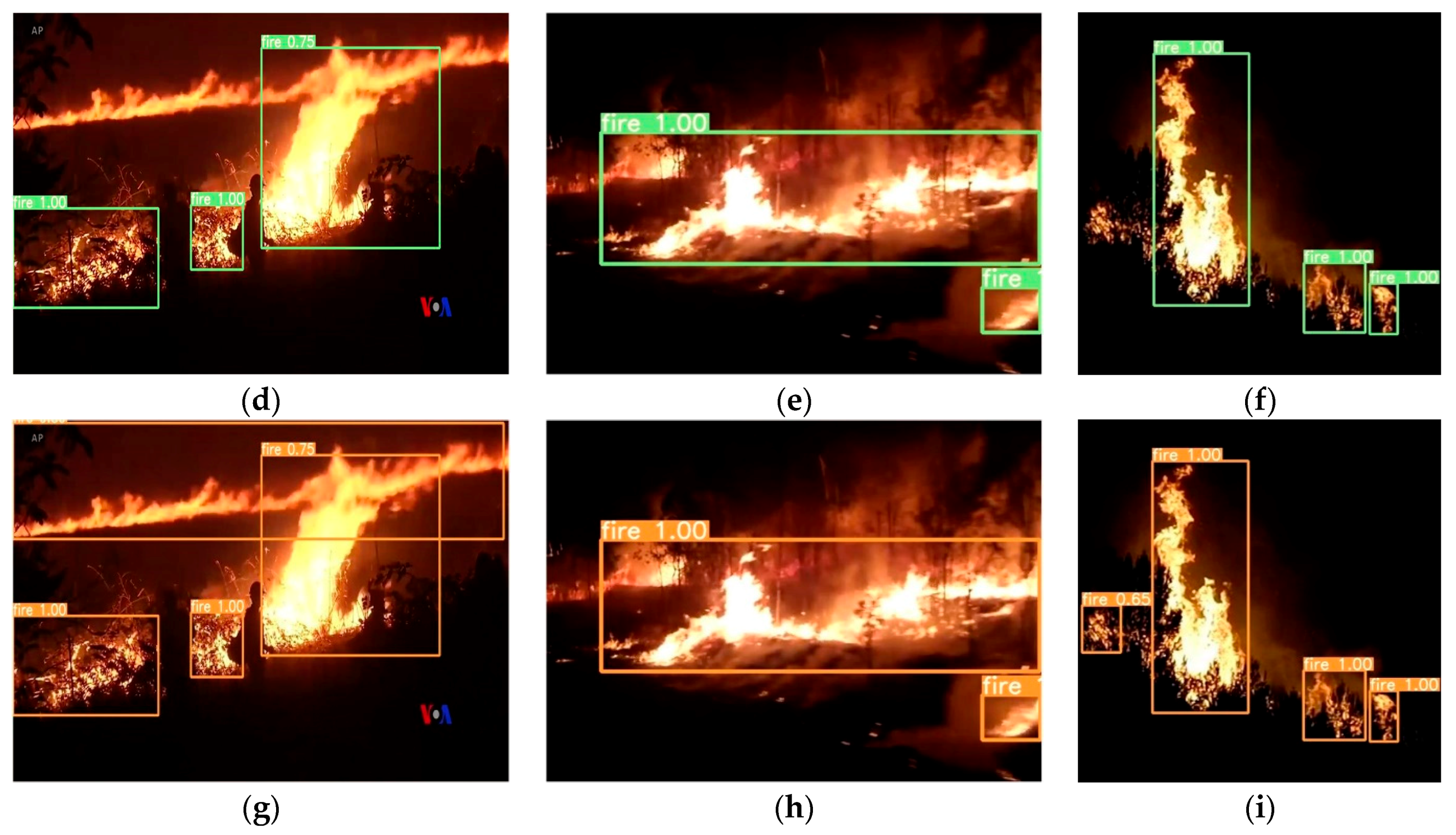
3.2. Comparison
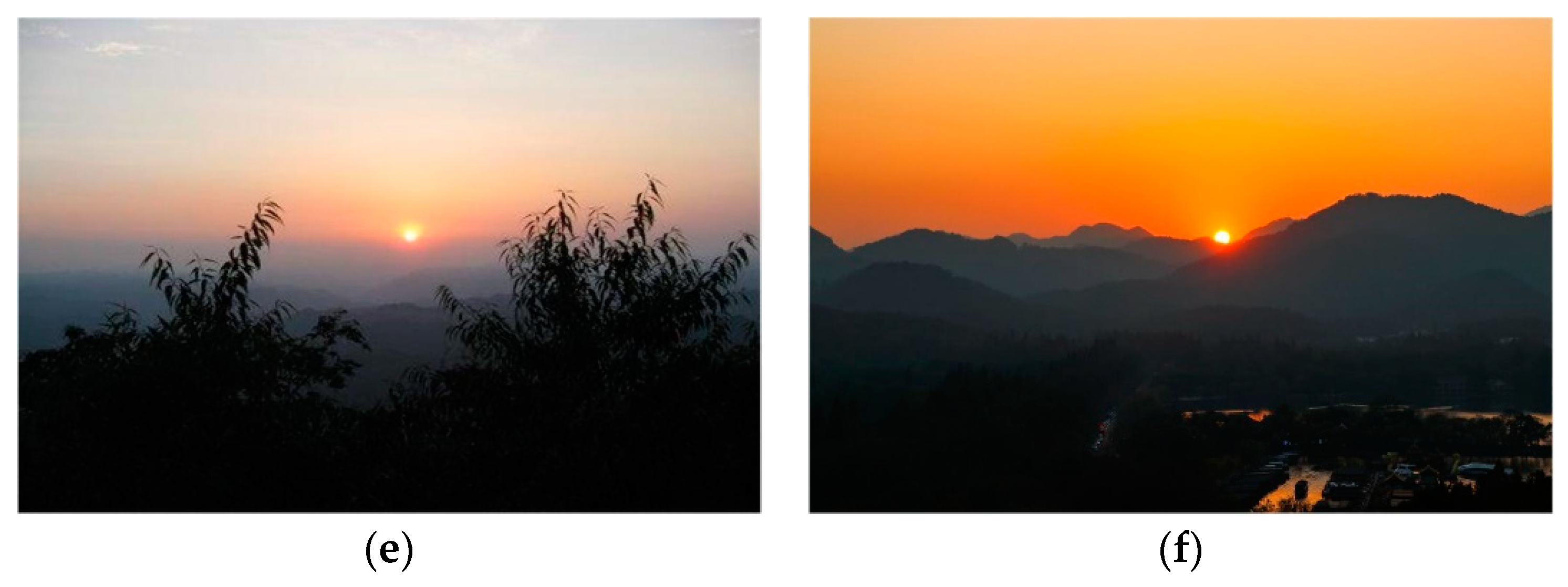
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Li, W.; Yin, Z.; Liu, S.; Guo, X. Forest fire detection system based on wireless sensor network. In Proceedings of the 4th IEEE Conference on Industrial Electronics and Applications (ICIEA 2009), Xi’an, China, 25–27 May 2009; pp. 520–523. [Google Scholar]
- Yu, L.; Wang, N.; Meng, X. Real-time forest fire detection with wireless sensor networks. In Proceedings of the International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2005), Wuhan, China, 26 September 2005; pp. 1214–1217. [Google Scholar]
- Chen, S.J.; Hovde, D.C.; Peterson, K.A.; Marshall, A.W. Fire detection using smoke and gas sensors. Fire Saf. J. 2007, 42, 507–515. [Google Scholar] [CrossRef]
- Zhang, F.; Zhao, P.; Xu, S.; Wu, Y.; Yang, X.; Zhang, Y. Integrating multiple factors to optimize watchtower deployment for wildfire detection. Sci. Total Environ. 2020, 737, 139561. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Zhao, P.; Thiyagalingam, J.; Kirubarajan, T. Terrain-influenced incremental watchtower expansion for wildfire detection. Sci. Total Environ. 2018, 654, 164–176. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.; Kwon, O.; Jung, C.; Park, S. The development of UV/IR combination flame detector. J. KIIS 2001, 16, 1–8. [Google Scholar]
- Kang, D.; Kim, E.; Moon, P.; Sin, W.; Kang, M. Design and analysis of flame signal detection with the combination of UV/IR sensors. J. Korean Soc. Int. Inf. 2013, 14, 45–51. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, A.M.; Utkin, A.B.; Lavrov, A.V.; Vilar, R.M. Development of neural network committee machines for automatic forest fire detection using lidar. Pattern Recognit. 2004, 37, 2039–2047. [Google Scholar] [CrossRef]
- Chen, T.H.; Wu, P.H.; Chiou, Y.C. An early fire-detection method based on image processing. In Proceedings of the IEEE International Conference on Image Processing (ICIP 2004), Singapore, 24–27 October 2004; pp. 1707–1710. [Google Scholar]
- Töreyin, B.U.; Dedeoğlu, Y.; Güdükbay, U.; Cetin, A.E. Computer vision based method for real-time fire and flame detection. Pattern Recognit. Lett. 2006, 27, 49–58. [Google Scholar] [CrossRef] [Green Version]
- Çelik, T.; Özkaramanlı, H.; Demirel, H. Fire and smoke detection without sensors: Image processing based approach. In Proceedings of the IEEE 15th European Signal Processing Conference (EUSIPCO 2007), Poznan, Poland, 3–7 September 2007; pp. 1794–1798. [Google Scholar]
- Teng, Z.; Kim, J.H.; Kang, D.J. Fire detection based on hidden Markov models. Int. J. Control Autom. Syst. 2010, 8, 822–830. [Google Scholar] [CrossRef]
- Chino, D.Y.; Avalhais, L.P.; Rodrigues, J.F.; Traina, A.J. Bowfire: Detection of fire in still images by integrating pixel color and texture analysis. In Proceedings of the 28th SIBGRAPI Conference on Graphics, Patterns and Images, Salvador, Brazil, 26–29 August 2015; pp. 95–102. [Google Scholar]
- Wu, S.; Zhang, L. Using popular object detection methods for real time forest fire detection. In Proceedings of the 11th International Symposium on Computational Intelligence and Design (ISCID 2018), Hangzhou, China, 8–9 December 2018; pp. 280–284. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2016), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, Hawaii, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vsion (ECCV 2016), Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Kim, B.; Lee, J. A video-based fire detection using deep learning models. Appl. Sci. 2019, 9, 2862. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.; Shim, J. False Positive Decremented Research for Fire and Smoke Detection in Surveillance Camera using Spatial and Temporal Features Based on Deep Learning. Electronics 2019, 8, 1167. [Google Scholar] [CrossRef] [Green Version]
- Pan, H.; Badawi, D.; Cetin, A.E. Computationally Efficient Wildfire Detection Method Using a Deep Convolutional Network Pruned via Fourier Analysis. Sensors 2020, 20, 2891. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Guo, C.; Yang, J. Using PCAand one-stage detectors for real-time forest fire detection. J. Eng. 2020, 2020, 383–387. [Google Scholar] [CrossRef]
- Ultralytics-Yolov5. Available online: https://github.com/ultralytics/yolov5 (accessed on 1 January 2021).
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2020), Washington, DC, USA, 14–19 June 2020; pp. 10781–10790. [Google Scholar]
- Tan, M.; Le, Q. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the International Conference on Machine Learning (ICML 2019), Long Beach, CA, USA, 9–15 June 2019; pp. 6105–6114. [Google Scholar]
- BoWFire Dataset. Available online: https://bitbucket.org/gbdi/bowfire-dataset/downloads/ (accessed on 1 January 2021).
- FD-Dataset. Available online: http://www.nnmtl.cn/EFDNet/ (accessed on 1 January 2021).
- ForestryImages. Available online: https://www.forestryimages.org/browse/subthumb.cfm?sub=740 (accessed on 1 January 2021).
- VisiFire. Available online: http://signal.ee.bilkent.edu.tr/VisiFire/ (accessed on 1 January 2021).
- Everingham, M.; Eslami, S.A.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the 13th European Conference on Computer Cision (ECCV 2014), Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Wang, C.Y.; Mark Liao, H.Y.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A new backbone that can enhance learning capability of cnn. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2020), Washington, DC, USA, 14–19 June 2020; pp. 390–391. [Google Scholar]
- Wang, K.; Liew, J.H.; Zou, Y.; Zhou, D.; Feng, J. Panet: Few-shot image semantic segmentation with prototype alignment. In Proceedings of the IEEE International Conference on Computer Vision (ICCV 2019), Seoul, Korea, 20–26 October 2019; pp. 9197–9206. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2016), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, Hawaii, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated residual transformations for deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2016), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1492–1500. [Google Scholar]
- Neubeck, A.; Van Gool, L. Efficient non-maximum suppression. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR 2006), Hong Kong, China, 20–24 August 2006; pp. 850–855. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L. Pytorch: An imperative style, high-performance deep learning library. In Proceedings of the Neural Information Processing Systems (NIPS 2019), Vancouver, BC, Canada, 8–14 December 2019; pp. 8026–8037. [Google Scholar]
- Bottou, L. Large-scale machine learning with stochastic gradient descent. In Proceedings of the 19th International Conference on Computational Statistics (COMPSTAT 2010), Paris, France, 22–27 August 2010; pp. 177–186. [Google Scholar]
- Zinkevich, M.; Weimer, M.; Li, L.; Smola, A.J. Parallelized stochastic gradient descent. In Proceedings of the Neural Information Processing Systems (NIPS 2010), Vancouver, BC, Canada, 6–11 December 2010; pp. 2595–2603. [Google Scholar]
- Loshchilov, I.; Hutter, F. Decoupled weight decay regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Merino, L.; Caballero, F.; Martínez-de-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Serón, F.J.; Gutiérrez, D.; Magallón, J.; Ferragut, L.; Asensio, M.I. The evolution of a wildland forest fire front. Vis. Comput. 2005, 21, 152–169. [Google Scholar] [CrossRef]
- Pimont, F.; Dupuy, J.L.; Linn, R.R.; Dupont, S. Impacts of tree canopy structure on wind flows and fire propagation simulated with FIRETEC. Ann. For. Sci. 2011, 68, 523–530. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Precision (AP) | |
| AP Across Scales: | |
| for small objects: | |
| for medium objects: | |
| for big objects: | |
| Average Recall (AR) | |
| AR Across Scales: | |
| for small objects: | |
| for medium objects: | |
| for big objects: |
| Model | Train | Test | Optimizer | LR | Batch Size | Epoch |
|---|---|---|---|---|---|---|
| Yolov5 | 2381 | 476 | SGD [41,42] | 8 | 300 | |
| EfficientDet | 2381 | 476 | AdamW [43] | 4 | 300 | |
| EfficientNet | 8185 | 1636 | SGD | 8 | 300 |
| Model | FPR | FA | Latency (ms) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SSD | 66.8 | 37.8 | 42.4 | 78.6 | 70.1 | 39.1 | 45.7 | 82.7 | 45.6 | 92.6 | 88.8 |
| Yolov3 | 66.4 | 26.0 | 44.6 | 78.1 | 71.1 | 26.1 | 52.5 | 82.5 | 22.9 | 88.0 | 15.6 |
| Yolov3-SPP | 68.3 | 56.3 | 49.9 | 76.7 | 73.9 | 60.9 | 56.6 | 81.9 | 30.7 | 93.3 | 15.6 |
| Yolov4 | 69.6 | 53.7 | 48.9 | 78.4 | 75.5 | 60.9 | 57.5 | 83.9 | 61.9 | 94.1 | 20.5 |
| Yolov5 | 70.5 | 51.9 | 53.7 | 79.2 | 75.6 | 56.5 | 61.2 | 83.0 | 22.6 | 94.7 | 28.0 |
| EfficientDet | 75.7 | 63.7 | 58.5 | 83.0 | 79.2 | 65.2 | 63.9 | 86.5 | 41.8 | 95.5 | 65.6 |
| Ours (2 learners) | 79.7 | 72.2 | 65.6 | 85.5 | 84.1 | 76.1 | 73.1 | 89.3 | 51.6 | 99.4 | 66.8 |
| Ours (3 learners) | 79.0 | 72.2 | 64.9 | 84.7 | 83.8 | 76.1 | 72.6 | 88.9 | 0.3 | 98.9 | 66.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, R.; Lin, H.; Lu, K.; Cao, L.; Liu, Y. A Forest Fire Detection System Based on Ensemble Learning. Forests 2021, 12, 217. https://doi.org/10.3390/f12020217
Xu R, Lin H, Lu K, Cao L, Liu Y. A Forest Fire Detection System Based on Ensemble Learning. Forests. 2021; 12(2):217. https://doi.org/10.3390/f12020217
Chicago/Turabian StyleXu, Renjie, Haifeng Lin, Kangjie Lu, Lin Cao, and Yunfei Liu. 2021. "A Forest Fire Detection System Based on Ensemble Learning" Forests 12, no. 2: 217. https://doi.org/10.3390/f12020217