

GAM: General Auxetic Metamaterial with Tunable 3D Auxetic Behavior Using the Same Unit Cell Boundary Connectivity

 , ,
, ,  and
and
Abstract
:1. Introduction
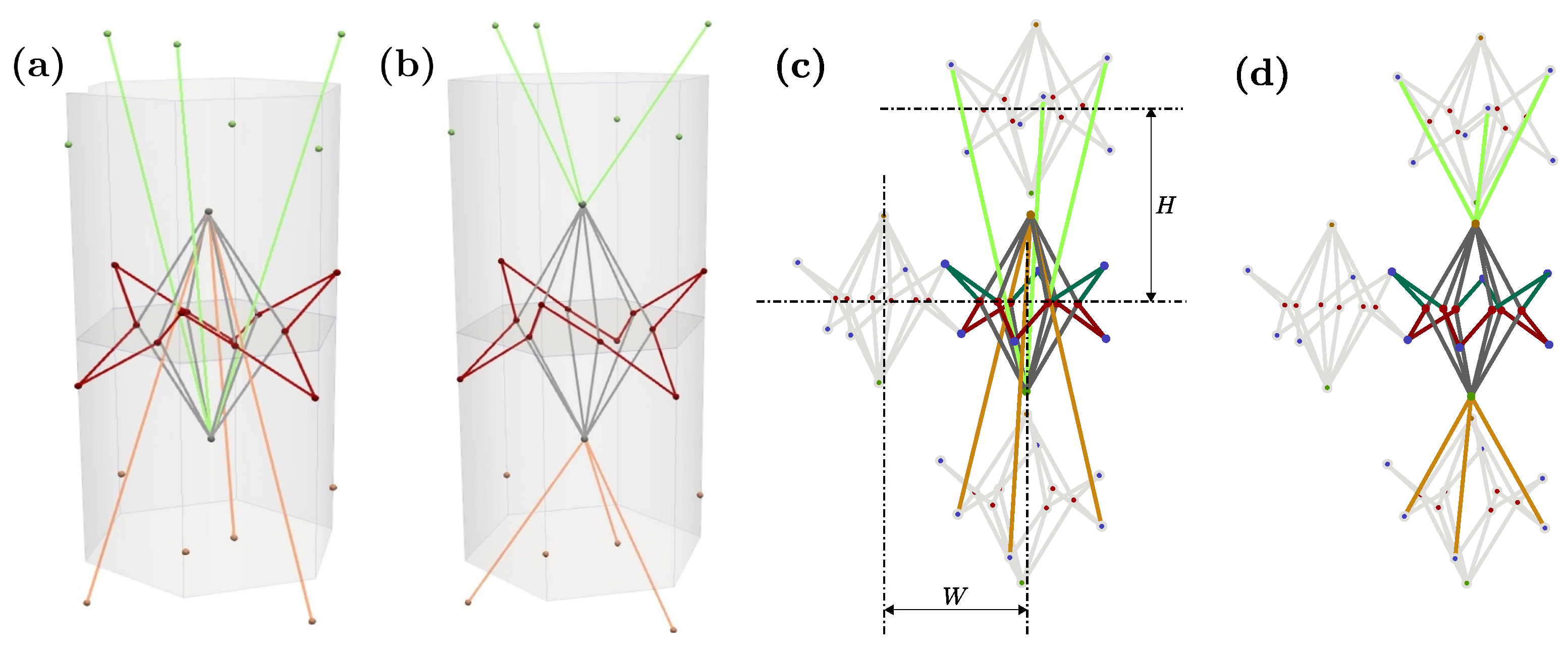
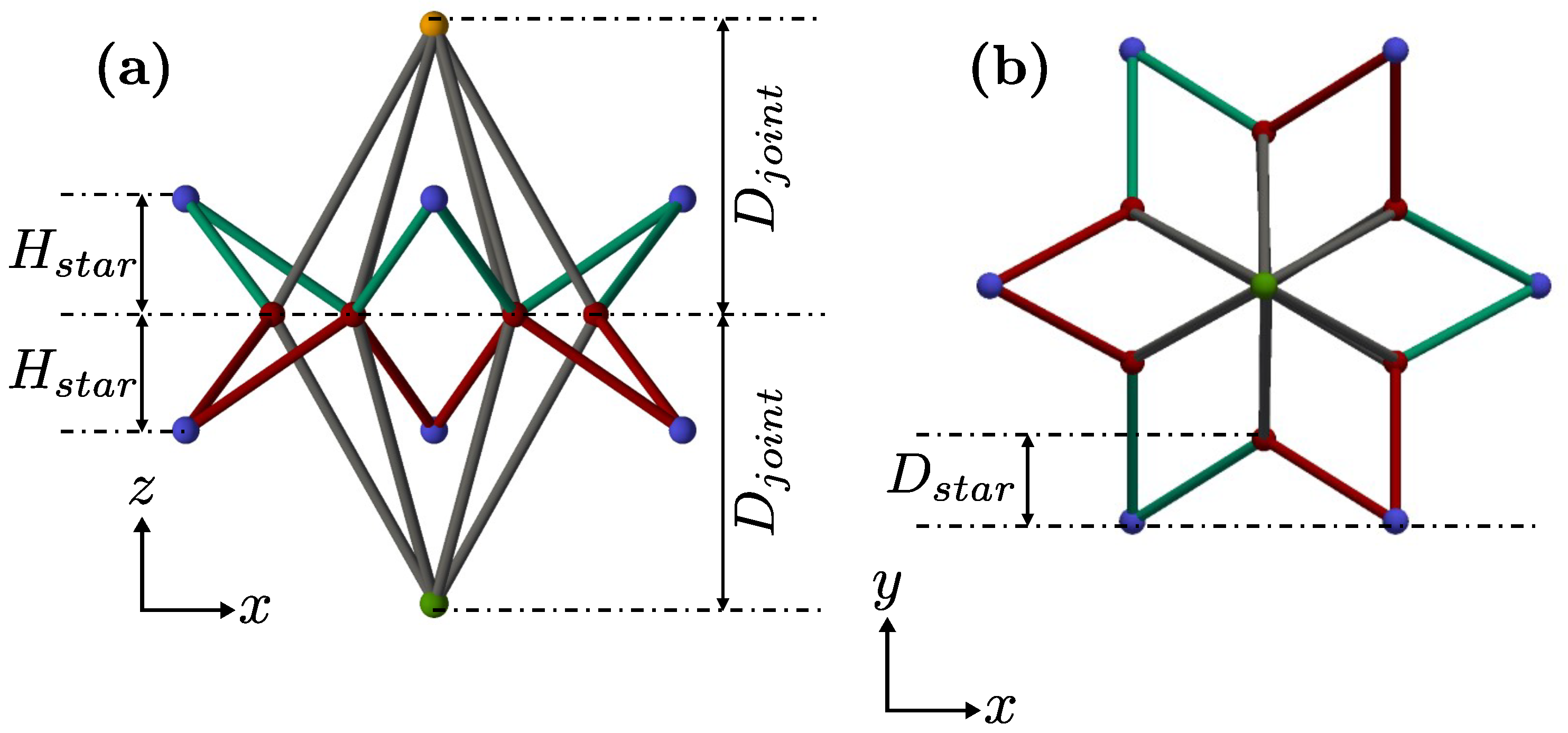
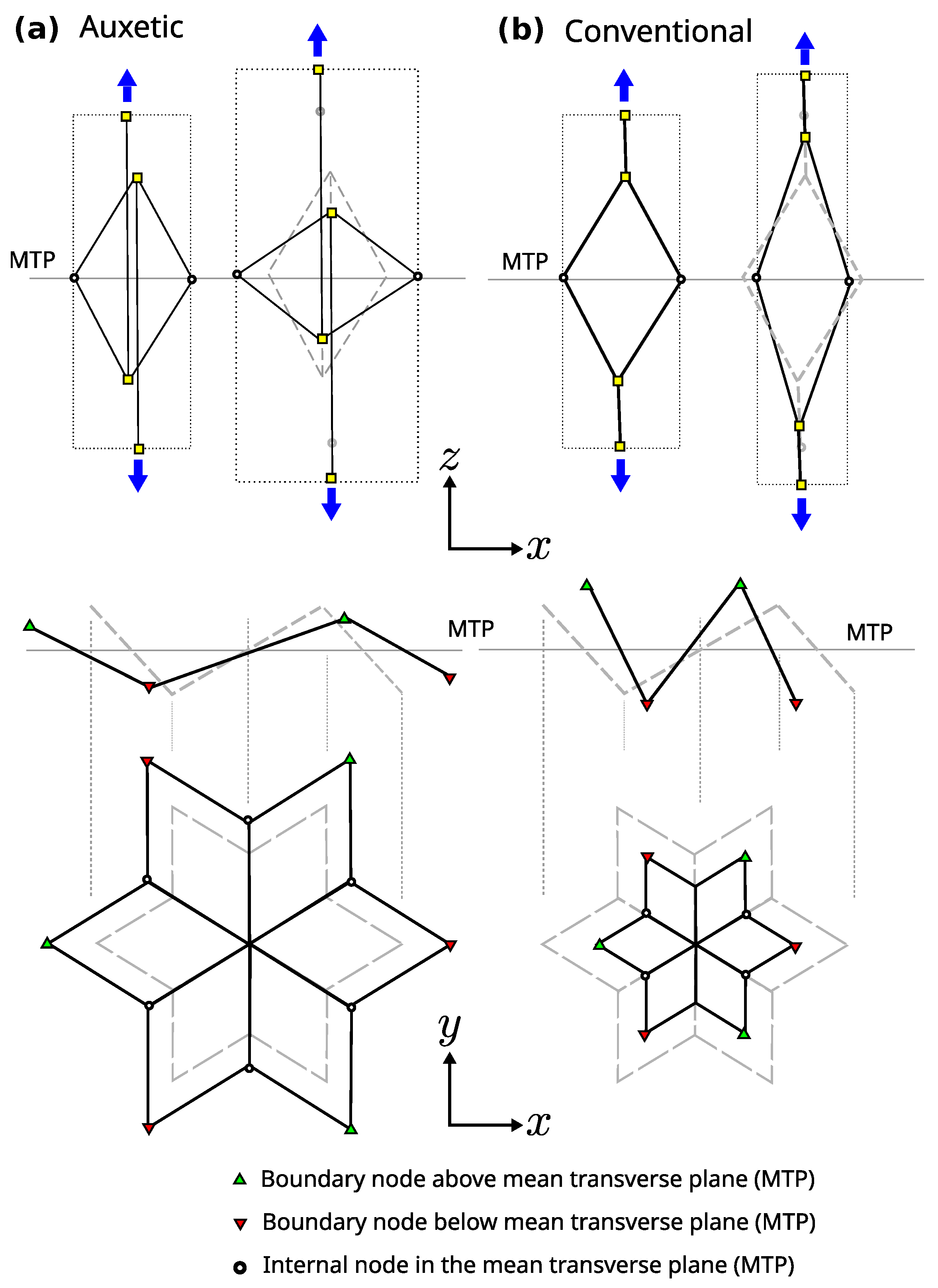
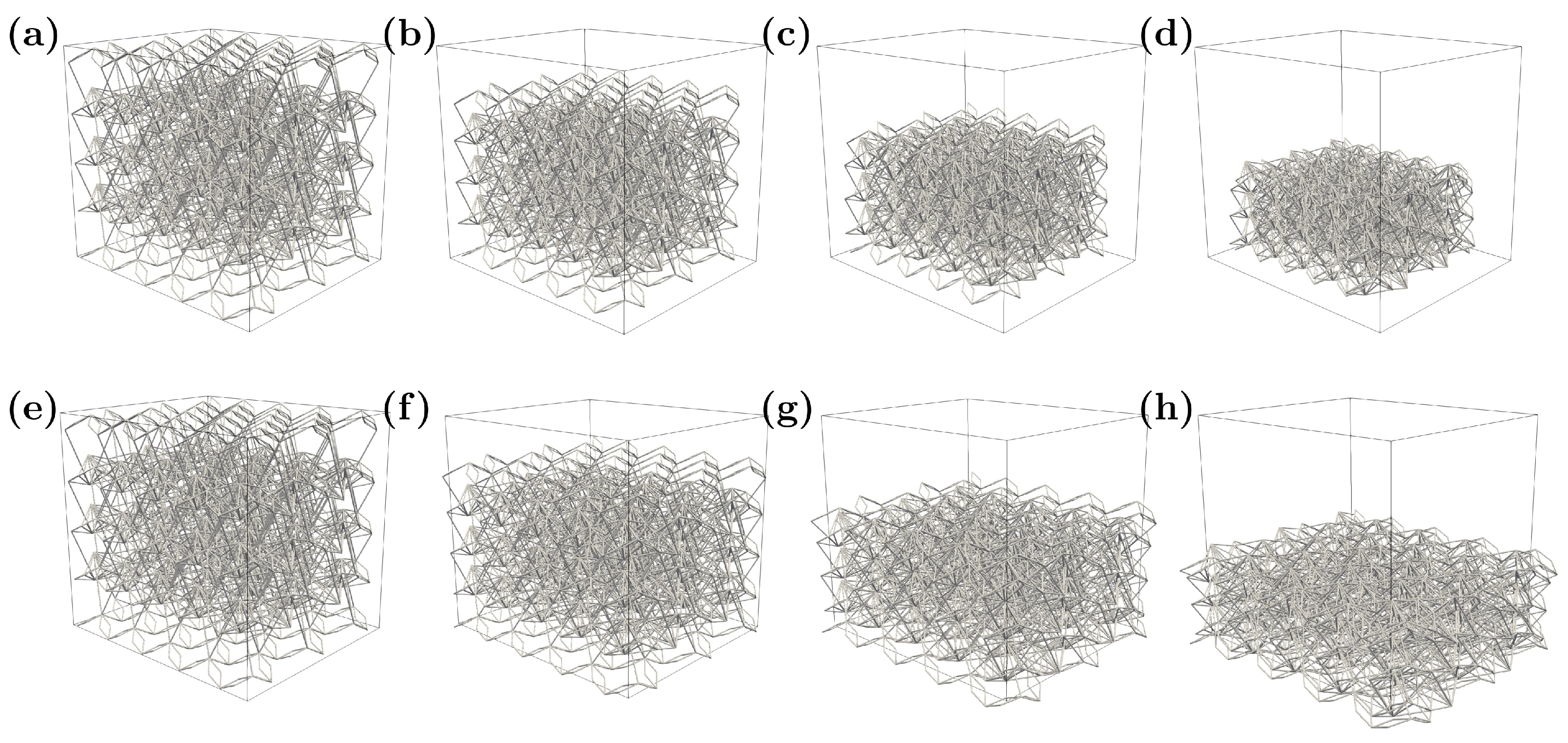
2. Theoretical Description of the Unit Cell
3. Examples of Simple Implementations of the Metamaterial
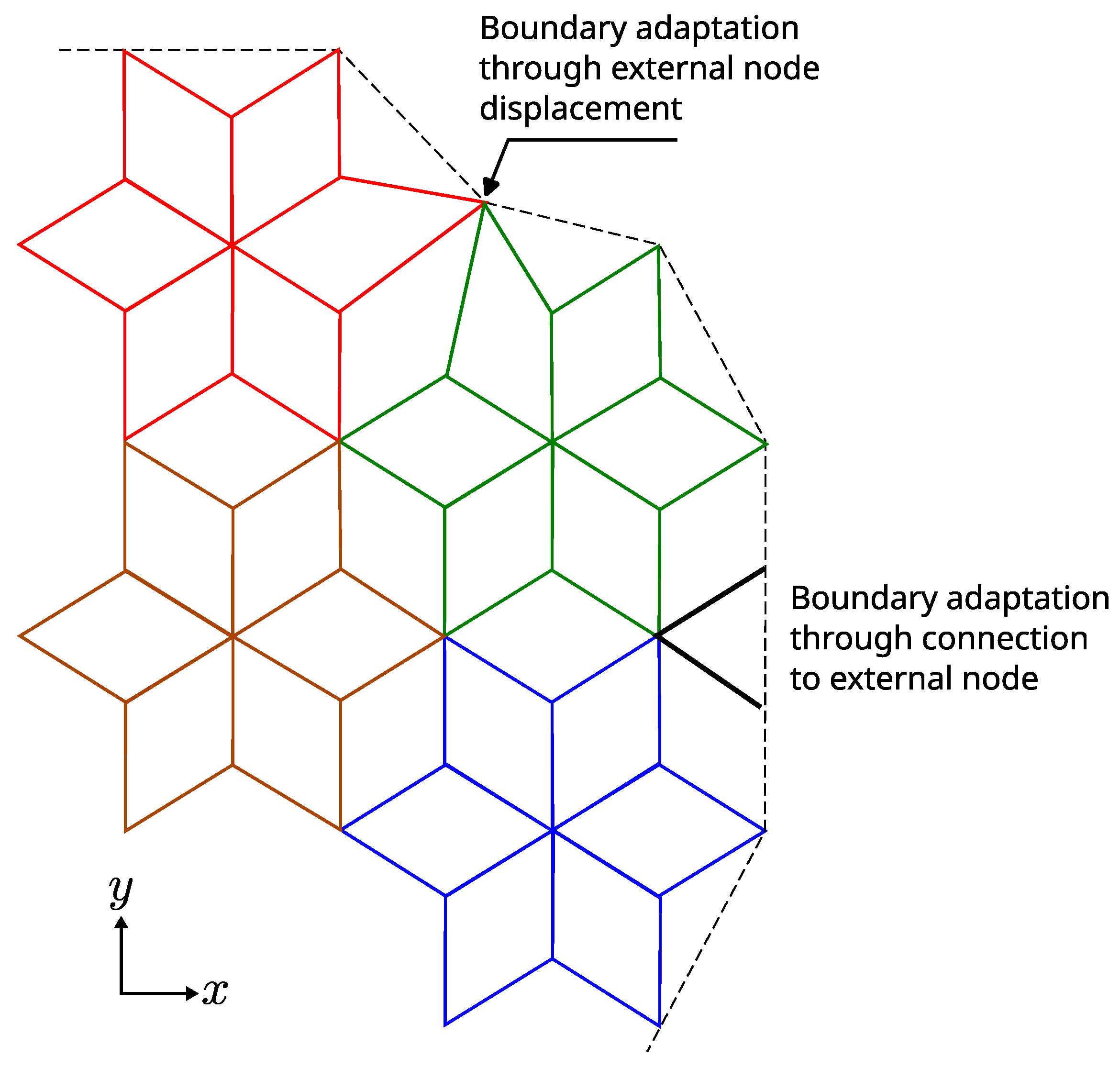
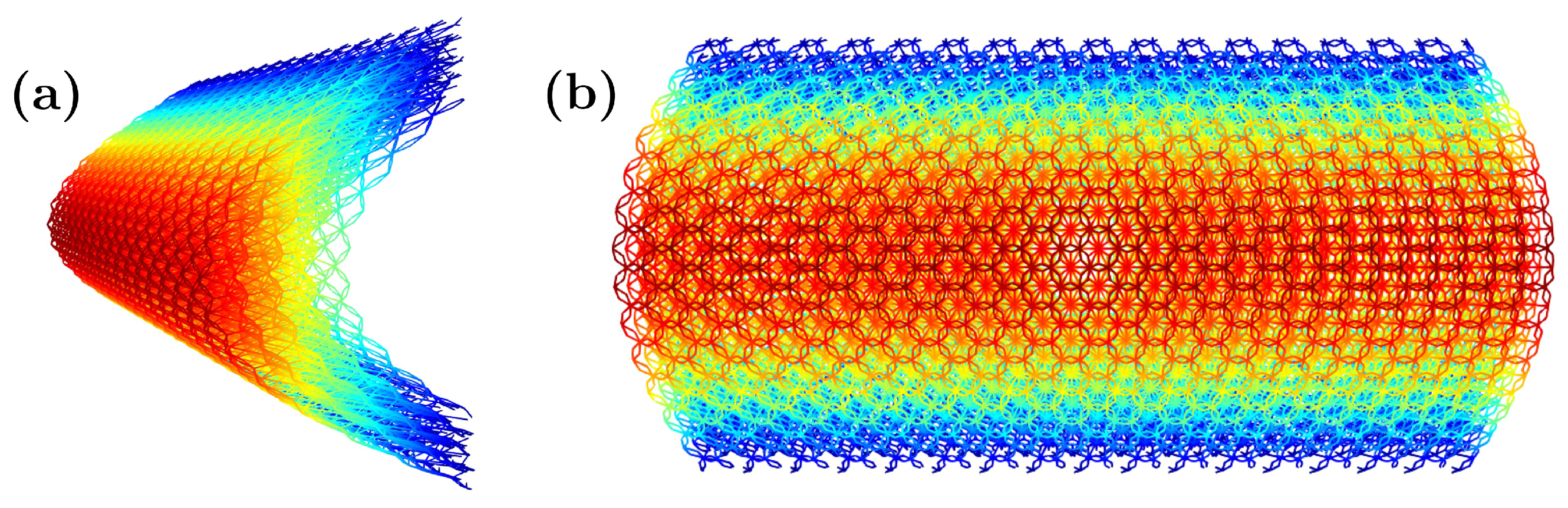
3.1. Shell Generation with Layers of This Metamaterial
3.2. Numerical Testing of the Metamaterial
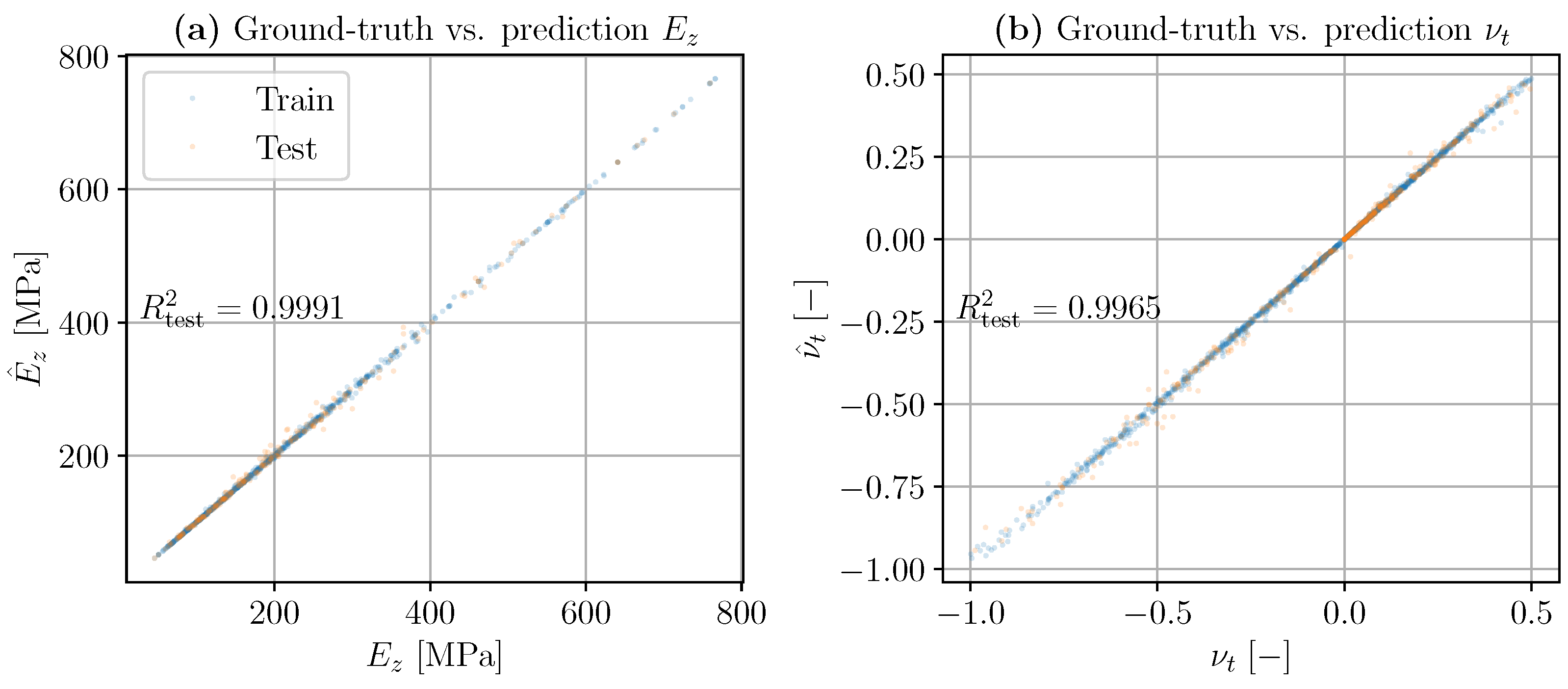
3.3. Determination of the Mechanical Properties through Inverse Analysis with a Simple ML Model
- Inputs. Geometrical parameters: H, , , .
- Outputs. Mechanical properties: ,
4. Conclusions
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Structural Matrix Calculus Model and Equivalent Young’s Modulus and Poisson’s Ratio Calculation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [MPa] | |||
|---|---|---|---|
| Nastran | 174 | ||
| GAM code | 186 |
References
- Kock, W. Metal lens antennas. Proc. IRE 1946, 34, 828–836. [Google Scholar] [CrossRef]
- Kumar, R.; Kumar, M.; Chohan, J.S.; Kumar, S. Overview on metamaterial: History, types and applications. Mater. Today Proc. 2022, 56, 3016–3024. [Google Scholar] [CrossRef]
- Jandyal, A.; Chaturvedi, I.; Wazir, I.; Raina, A.; Ul Haq, M.I. 3D printing—A review of processes, materials and applications in industry 4.0. Sustain. Oper. Comput. 2022, 3, 33–42. [Google Scholar] [CrossRef]
- Kang, J.W.; Ma, Q.X. The role and impact of 3D printing technologies in casting. China Foundry 2017, 14, 157–168. [Google Scholar] [CrossRef] [Green Version]
- Buchanan, C.; Gardner, L. Metal 3D printing in construction: A review of methods, research, applications, opportunities and challenges. Eng. Struct. 2019, 180, 332–348. [Google Scholar] [CrossRef]
- Low, Z.X.; Chua, Y.T.; Ray, B.M.; Mattia, D.; Metcalfe, I.S.; Patterson, D.A. Perspective on 3D printing of separation membranes and comparison to related unconventional fabrication techniques. J. Membr. Sci. 2017, 523, 596–613. [Google Scholar] [CrossRef] [Green Version]
- Berman, B. 3-D printing: The new industrial revolution. Bus. Horizons 2012, 55, 155–162. [Google Scholar] [CrossRef]
- Fortune Business Insights. 3D Printing Market Size, Share & COVID-19 Impact Analysism By Components, By Technology, By Application, By End-User, and Regional Forecast, 2022–2029. Available online: https://www.fortunebusinessinsights.com/industry-reports/3d-printing-market-101902 (accessed on 15 April 2023).
- Zhou, Y.; Li, Y.; Jiang, D.; Chen, Y.; Xie, Y.M.; Jia, L.J. In-plane impact behavior of 3D-printed auxetic stainless honeycombs. Eng. Struct. 2022, 266, 114656. [Google Scholar] [CrossRef]
- Mao, J.J.; Wang, S.; Tan, W.; Liu, M. Modular multistable metamaterials with reprogrammable mechanical properties. Eng. Struct. 2022, 272, 114976. [Google Scholar] [CrossRef]
- Meza, L.R.; Zelhofer, A.J.; Clarke, N.; Mateos, A.J.; Kochmann, D.M.; Greer, J.R. Resilient 3D hierarchical architected metamaterials. Proc. Natl. Acad. Sci. USA 2015, 112, 11502–11507. [Google Scholar] [CrossRef] [Green Version]
- Bishop-Moser, J.; Spadaccini, C.; Andres, C. Metamaterials Manufacturing: Pathway to Industrial Competitiveness. Technical Report. 2018. Available online: http://mforesight.org/projects-events/metamaterials/ (accessed on 16 April 2023).
- Bertoldi, K.; Vitelli, V.; Christensen, J.; Van Hecke, M. Flexible mechanical metamaterials. Nat. Rev. Mater. 2017, 2, 17066. [Google Scholar] [CrossRef] [Green Version]
- Barchiesi, E.; Spagnuolo, M.; Placidi, L. Mechanical metamaterials: A state of the art. Math. Mech. Solids 2019, 24, 212–234. [Google Scholar] [CrossRef]
- Evans, K.E. Auxetic polymers: A new range of materials. Endeavour 1991, 15, 170–174. [Google Scholar] [CrossRef]
- Love, A.E.H. A treatise on the Mathematical Theory of Elasticity; University Press: Cambridge, UK, 1927. [Google Scholar]
- Almgren, R.F. An isotropic three-dimensional structure with Poisson’s ratio = −1. J. Elast 1985, 15, 427–430. [Google Scholar]
- Wojciechowski, K.W. Two-dimensional isotropic system with a negative Poisson ratio. Phys. Lett. A 1989, 137, 60–64. [Google Scholar] [CrossRef]
- Grima, J.N.; Winczewski, S.; Mizzi, L.; Grech, M.C.; Cauchi, R.; Gatt, R.; Attard, D.; Wojciechowski, K.W.; Rybicki, J. Tailoring graphene to achieve negative Poisson’s ratio properties. Adv. Mater. 2015, 27, 1455–1459. [Google Scholar] [CrossRef]
- Ting, T.; Barnett, D. Negative Poisson’s Ratios in Anisotropic Linear Elastic Media. J. Appl. Mech. 2005, 72, 929–931. [Google Scholar] [CrossRef]
- Brańka, A.C.; Heyes, D.M.; Wojciechowski, K.W. Auxeticity of cubic materials. Phys. Status Solidi B 2009, 246, 2063–2071. [Google Scholar] [CrossRef]
- Evans, K.E.; Alderson, A. Auxetic materials: Functional materials and structures from lateral thinking! Adv. Mater. 2000, 12, 617–628. [Google Scholar] [CrossRef]
- Kolken, H.M.; Zadpoor, A. Auxetic mechanical metamaterials. RSC Adv. 2017, 7, 5111–5129. [Google Scholar] [CrossRef] [Green Version]
- Lakes, R. Composites and Metamaterials; World Scientific: Singapore, 2020. [Google Scholar]
- Lim, T.C. Mechanics of Metamaterials with Negative Parameters; Springer Nature: Singapore, 2020. [Google Scholar]
- Zhu, Y.; Luo, Y.; Gao, D.; Yu, C.; Ren, X.; Zhang, C. In-plane elastic properties of a novel re-entrant auxetic honeycomb with zigzag inclined ligaments. Eng. Struct. 2022, 268, 114788. [Google Scholar] [CrossRef]
- Huang, T.T.; Ren, X.; Zeng, Y.; Zhang, Y.; Luo, C.; Zhang, X.Y.; Xie, Y.M. Based on auxetic foam: A novel type of seismic metamaterial for Lamb waves. Eng. Struct. 2021, 246, 112976. [Google Scholar] [CrossRef]
- Hao, J.; Han, D.; Zhang, X.G.; Zhang, Y.; Jiang, W.; Teng, X.C.; Lang, J.P.; Pan, Y.; Ni, X.H.; Zhang, X.Y.; et al. Novel dual-platform lightweight metamaterials with auxeticity. Eng. Struct. 2022, 270, 114891. [Google Scholar] [CrossRef]
- Mizzi, L.; Mahdi, E.; Titov, K.; Gatt, R.; Attard, D.; Evans, K.E.; Grima, J.N.; Tan, J.C. Mechanical metamaterials with star-shaped pores exhibiting negative and zero Poisson’s ratio. Mater. Des. 2018, 146, 28–37. [Google Scholar] [CrossRef]
- Zheng, X.; Guo, X.; Watanabe, I. A mathematically defined 3D auxetic metamaterial with tunable mechanical and conduction properties. Mater. Des. 2021, 198, 109313. [Google Scholar] [CrossRef]
- Lakes, R. Foam structures with a negative Poisson’s ratio. Science 1987, 235, 1038–1040. [Google Scholar] [CrossRef]
- Crespo, J.; Duncan, O.; Alderson, A.; Montáns, F.J. Auxetic orthotropic materials: Numerical determination of a phenomenological spline-based stored density energy and its implementation for finite element analysis. Comput. Methods Appl. Mech. Eng. 2020, 371, 113300. [Google Scholar] [CrossRef]
- Amores, V.J.; San Millan, F.J.; Ben-Yelun, I.; Montans, F.J. A finite strain non-parametric hyperelastic extension of the classical phenomenological theory for orthotropic compressible composites. Compos. Part B Eng. 2021, 212, 108591. [Google Scholar] [CrossRef]
- Ren, X.; Das, R.; Tran, P.; Ngo, T.D.; Xie, Y.M. Auxetic metamaterials and structures: A review. Smart Mater. Struct. 2018, 27, 023001. [Google Scholar] [CrossRef]
- Cheng, X.; Zhang, Y.; Ren, X.; Han, D.; Jiang, W.; Zhang, X.G.; Luo, H.C.; Xie, Y.M. Design and mechanical characteristics of auxetic metamaterial with tunable stiffness. Int. J. Mech. Sci. 2022, 223, 107286. [Google Scholar] [CrossRef]
- Ren, X.; Shen, J.; Ghaedizadeh, A.; Tian, H.; Xie, Y.M. Experiments and parametric studies on 3D metallic auxetic metamaterials with tuneable mechanical properties. Smart Mater. Struct. 2015, 24, 095016. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Xu, X.; Lin, D.; Chen, W.; Xiong, G.; Yu, Y.; Fisher, T.S.; Li, H. Hyperbolically patterned 3D graphene metamaterial with negative Poisson’s ratio and superelasticity. Adv. Mater. 2016, 28, 2229–2237. [Google Scholar] [CrossRef]
- Ren, X.; Shen, J.; Tran, P.; Ngo, T.D.; Xie, Y.M. Design and characterisation of a tuneable 3D buckling-induced auxetic metamaterial. Mater. Des. 2018, 139, 336–342. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Ren, X.; Zhang, Y.; Xie, Y.M. A novel auxetic metamaterial with enhanced mechanical properties and tunable auxeticity. Thin-Walled Struct. 2022, 174, 109162. [Google Scholar] [CrossRef]
- Wang, L.; Ulliac, G.; Wang, B.; Iglesias Martínez, J.A.; Dudek, K.K.; Laude, V.; Kadic, M. 3D Auxetic Metamaterials with Elastically-Stable Continuous Phase Transition. Adv. Sci. 2022, 2022, 2204721. [Google Scholar] [CrossRef]
- Farzaneh, A.; Pawar, N.; Portela, C.M.; Hopkins, J.B. Sequential metamaterials with alternating Poisson’s ratios. Nat. Commun. 2022, 13, 1041. [Google Scholar] [CrossRef] [PubMed]
- Saucedo-Mora, L.; Carano, G.G.; Gomez, M.A.S.; Leal, F.J.M. Celda Unnidad de Metamaterial y Metamaterial Formado a Partir de Dicha Celda Unidad (In Spanish). ES Patent 2907514 A1, 11 November 2022. [Google Scholar]
- OEPM. INVENES (In Spanish). Available online: https://consultas2.oepm.es/InvenesWeb/faces/busquedaInternet.jsp (accessed on 30 September 2022).
- Office, E.P. EPO Worldwide Bibliographic Data. Available online: https://www.epo.org/searching-for-patents/data/bulk-data-sets/docdb.html (accessed on 18 September 2022).
- Wenzhi, Z.; Dianmin, J.; Zhiwei, L.; Nanxin, S. Three-Dimensional Auxetic Metamaterial Structure with Negative Poisson Ratio. CN110014641A, 16 July 2019. [Google Scholar]
- Yingying, X.; Li, Z.; Jianhui, M. 3D Multi-Component Composite Auxetic Metamaterial Based on Additive Manufacturing. CN114474785A, 13 May 2022. [Google Scholar]
- Fu, Y.; Liu, W. Design of mechanical metamaterial with controllable stiffness using curved beam unit cells. Compos. Struct. 2021, 258, 113195. [Google Scholar] [CrossRef]
- Ren, C.; Li, Q.; Yang, D. Quasi-static and sound insulation performance of a multifunctional cylindrical cellular shell with bidirectional negative-stiffness metamaterial cores. Int. J. Mech. Sci. 2020, 180, 105662. [Google Scholar] [CrossRef]
- Fleisch, M.; Thalhamer, A.; Meier, G.; Raguž, I.; Fuchs, P.; Pinter, G.; Schlögl, S.; Berer, M. Functional mechanical metamaterial with independently tunable stiffness in the three spatial directions. Mater. Today Adv. 2021, 11, 100155. [Google Scholar] [CrossRef]
- Yu, X.; Zhou, J.; Liang, H.; Jiang, Z.; Wu, L. Mechanical metamaterials associated with stiffness, rigidity and compressibility: A brief review. Prog. Mater. Sci. 2018, 94, 114–173. [Google Scholar] [CrossRef]
- Furche, T.; Gottlob, G.; Libkin, L.; Orsi, G.; Paton, N.W. Data Wrangling for Big Data: Challenges and Opportunities. In Proceedings of the EDBT, Bordeaux, France, 15–16 March 2016; Volume 16, pp. 473–478. [Google Scholar]
- Zheng, A.; Casari, A. Feature Engineering for Machine Learning: Principles and Techniques for Data Scientists; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2018. [Google Scholar]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson correlation coefficient. In Noise Reduction in Speech Processing; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–4. [Google Scholar]
- Myers, J.L.; Well, A.D.; Lorch, R.F. Research Design and Statistical Analysis; Routledge: Abingdon, UK, 2013. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Rao, C.R.; Rao, C.R.; Statistiker, M.; Rao, C.R.; Rao, C.R. Linear Statistical Inference and Its Applications; Wiley: New York, NY, USA, 1973; Volume 2. [Google Scholar]
- Przemieniecki, J.S. Theory of Matrix Structural Analysis; Courier Corporation: Chelmsford, MA, USA, 1985. [Google Scholar]









| E [GPa] | |
|---|---|
| 200 |
| Mean | Std | Min | 25% | 50% | 75% | Max | |
|---|---|---|---|---|---|---|---|
| 0.38 | 1.2 | ||||||
| 0.12 | 0.4 | ||||||
| 0.38 | 0.20 | 0.05 | 0.20 | 0.40 | 0.55 | 0.7 | |
| H | 2.41 | 0.69 | 1.50 | 2.00 | 2.50 | 3.00 | 3.5 |
| [MPa] | 184.78 | 159.64 | 0.00 | 87.78 | 148.62 | 242.30 | 766.2 |
| 0.28 | 0.00 | 0.5 |
| H | [MPa] | Representation | ||||
|---|---|---|---|---|---|---|
| 0.25 | 2.0 | 272.03 |  | |||
| 0.0 | 0.00 | 0.05 | 3.0 | 88.36 |  | |
| 0.6 | 0.00 | 0.20 | 3.0 | 266.09 |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben-Yelun, I.; Gómez-Carano, G.; San Millán, F.J.; Sanz, M.Á.; Montáns, F.J.; Saucedo-Mora, L. GAM: General Auxetic Metamaterial with Tunable 3D Auxetic Behavior Using the Same Unit Cell Boundary Connectivity. Materials 2023, 16, 3473. https://doi.org/10.3390/ma16093473
Ben-Yelun I, Gómez-Carano G, San Millán FJ, Sanz MÁ, Montáns FJ, Saucedo-Mora L. GAM: General Auxetic Metamaterial with Tunable 3D Auxetic Behavior Using the Same Unit Cell Boundary Connectivity. Materials. 2023; 16(9):3473. https://doi.org/10.3390/ma16093473
Chicago/Turabian StyleBen-Yelun, Ismael, Guillermo Gómez-Carano, Francisco J. San Millán, Miguel Ángel Sanz, Francisco Javier Montáns, and Luis Saucedo-Mora. 2023. "GAM: General Auxetic Metamaterial with Tunable 3D Auxetic Behavior Using the Same Unit Cell Boundary Connectivity" Materials 16, no. 9: 3473. https://doi.org/10.3390/ma16093473