
Study on Flexural Performance of Aluminum Alloy Gusset Joints Subjected to Bending Moment and Shear Force

Abstract
:1. Introduction
2. Validation of the FE Models
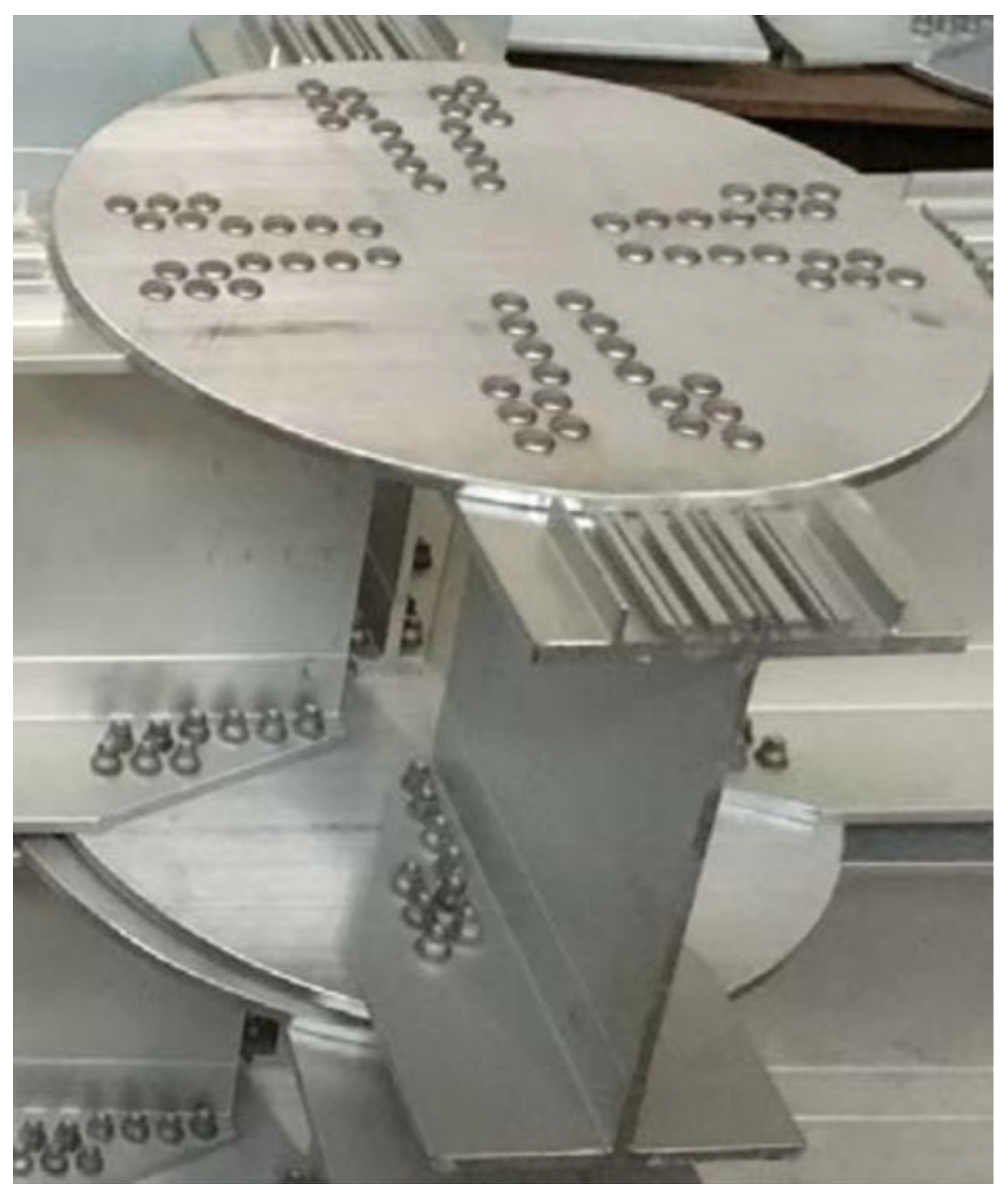
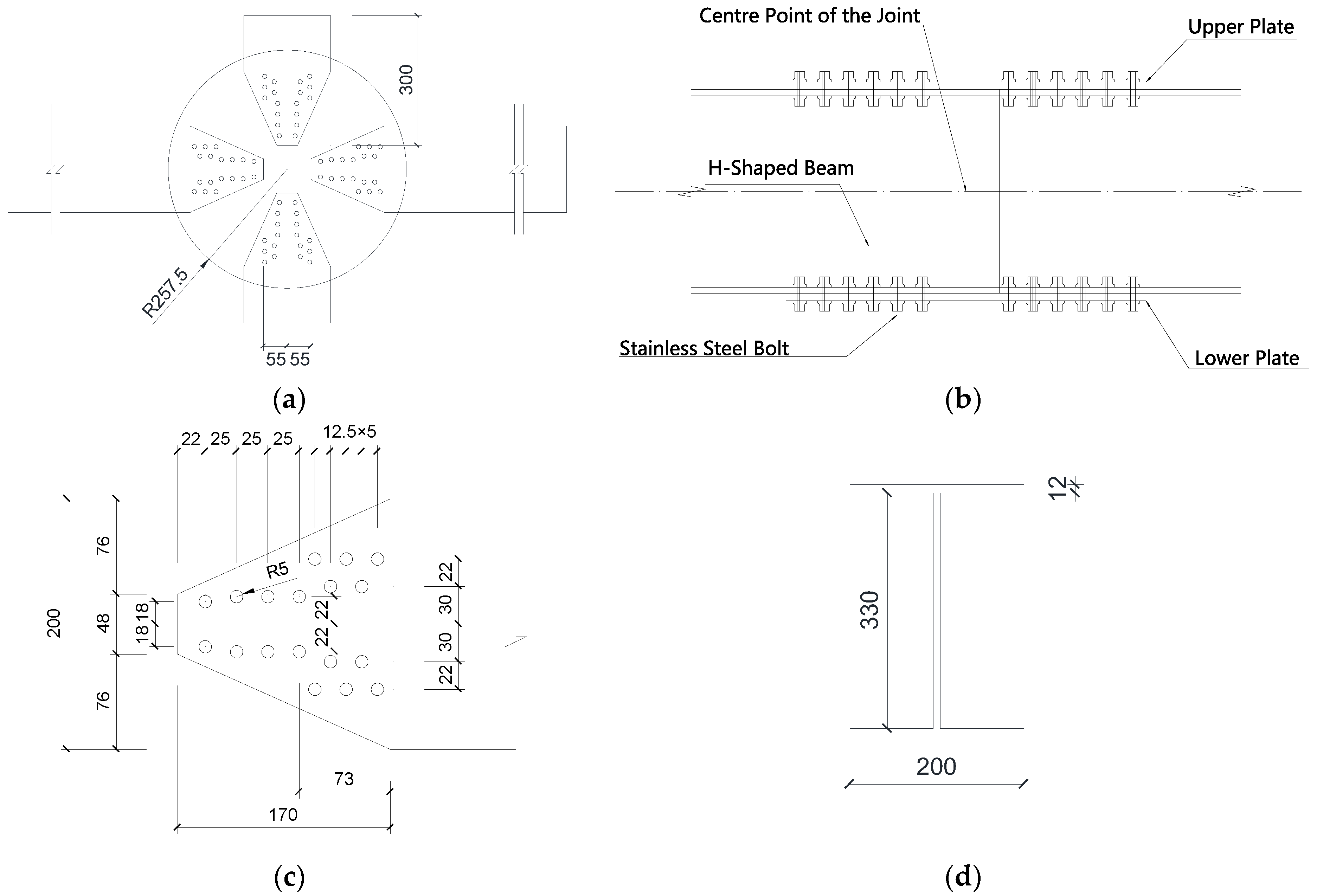
2.1. Experimental Model
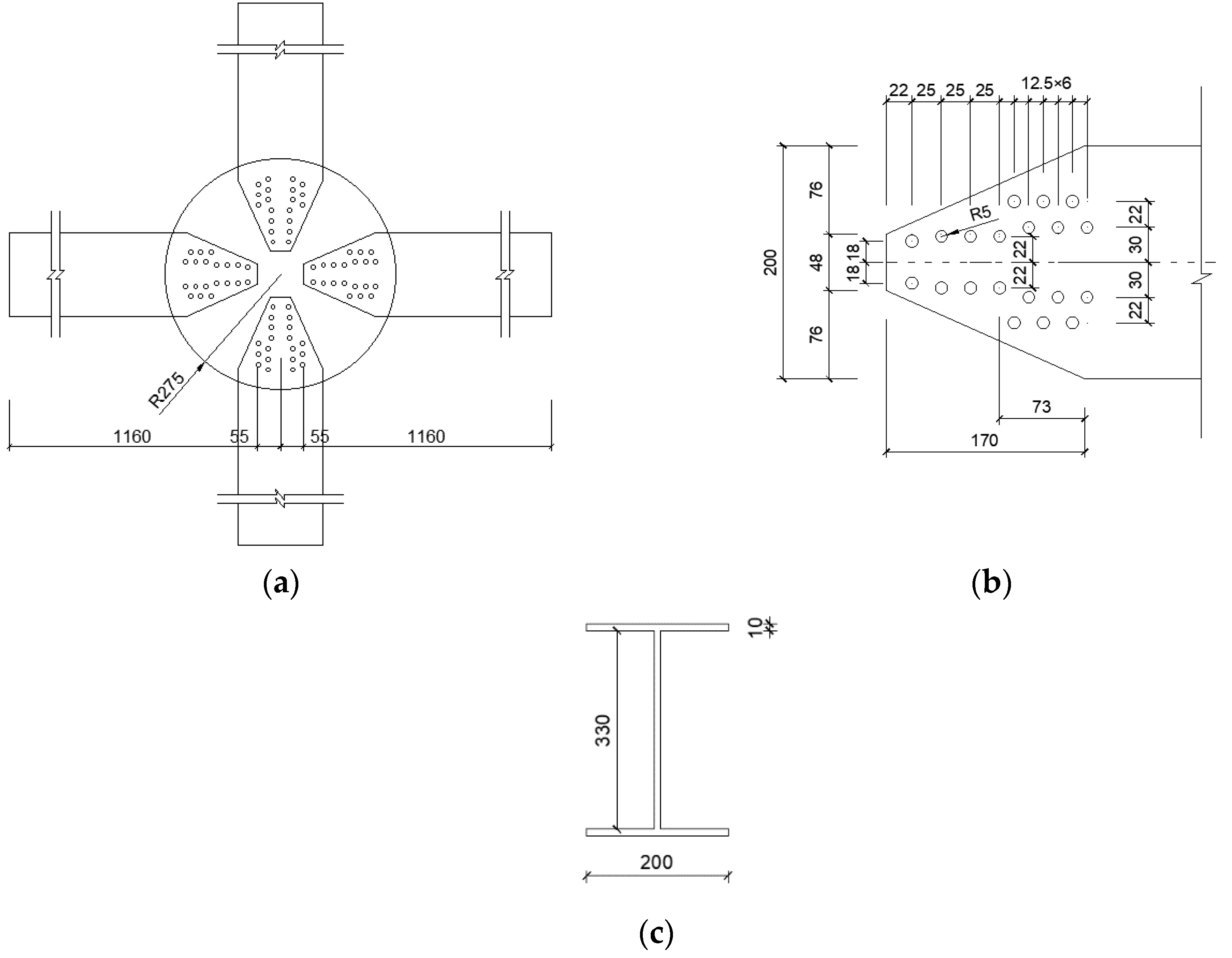
2.1.1. Geometric Dimensions
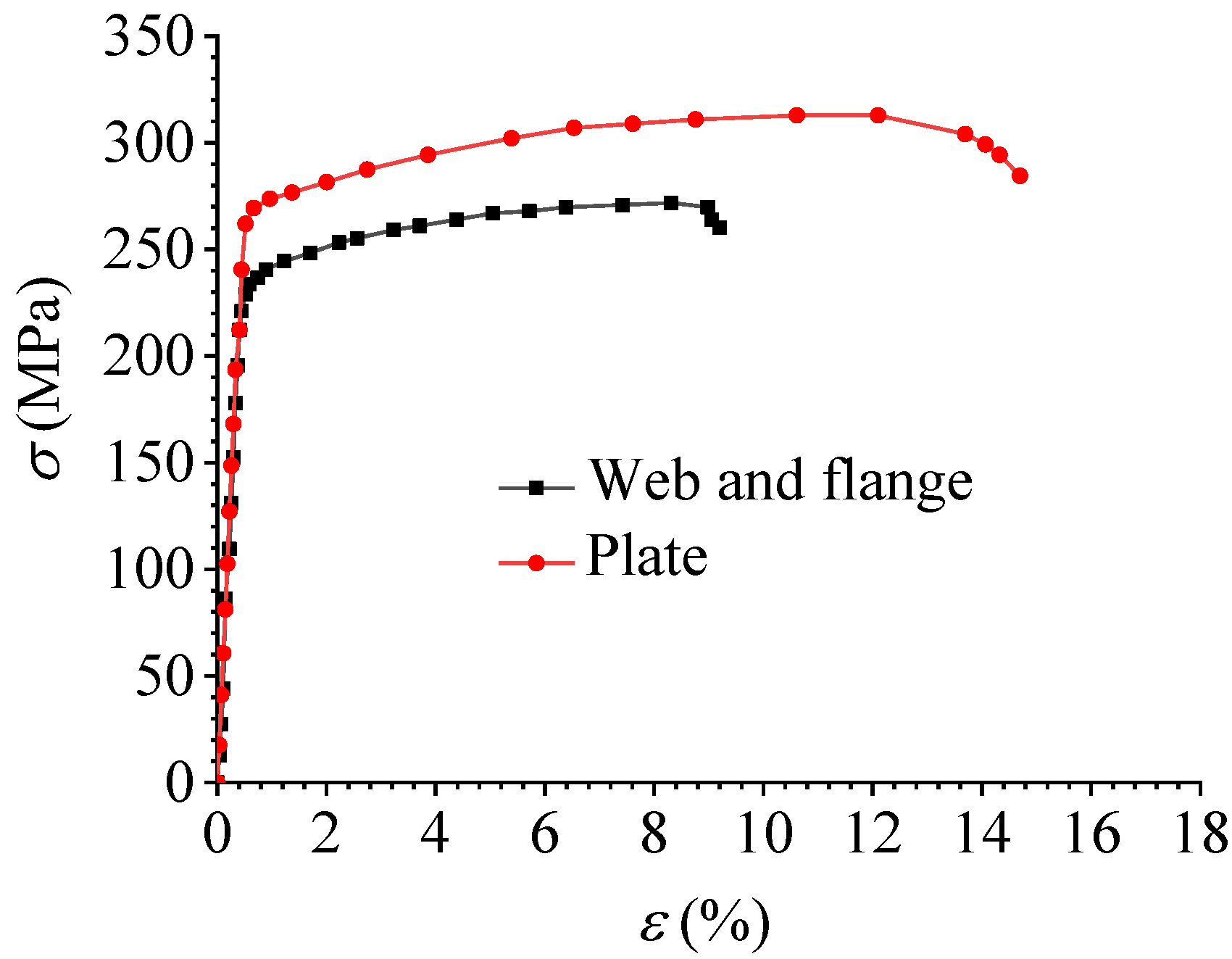
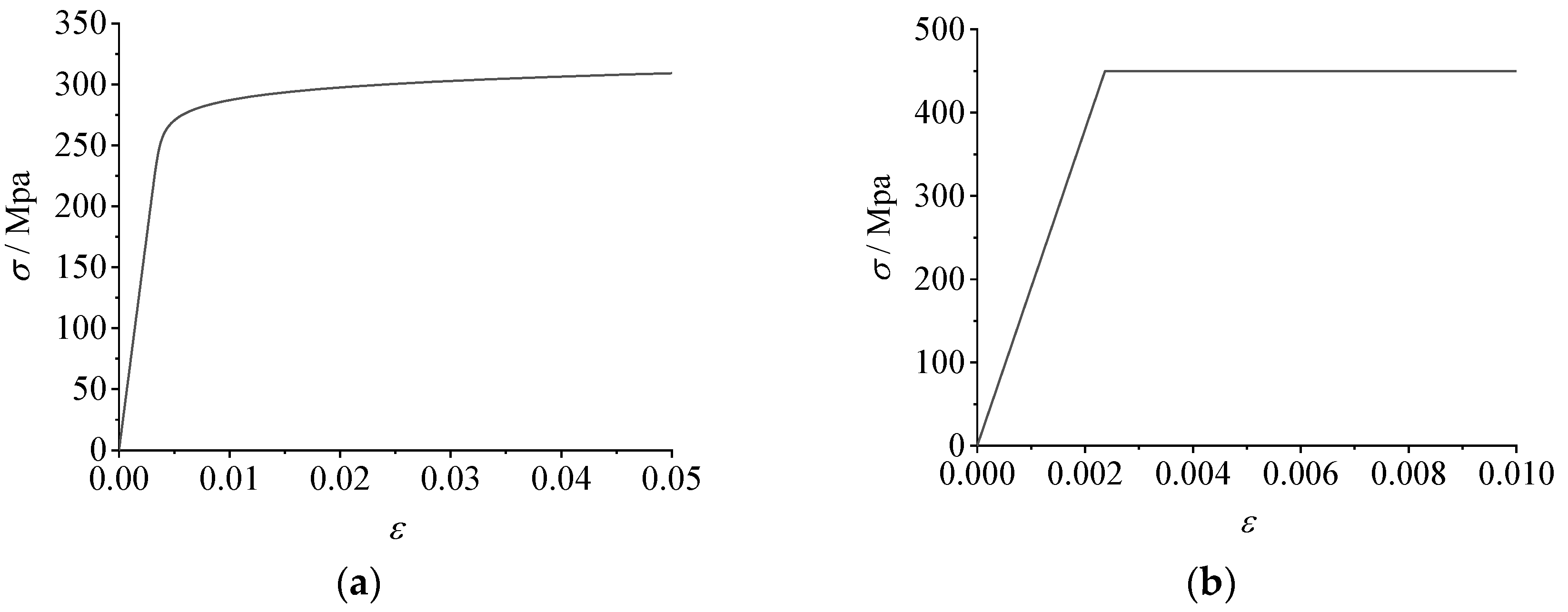
2.1.2. Material Properties
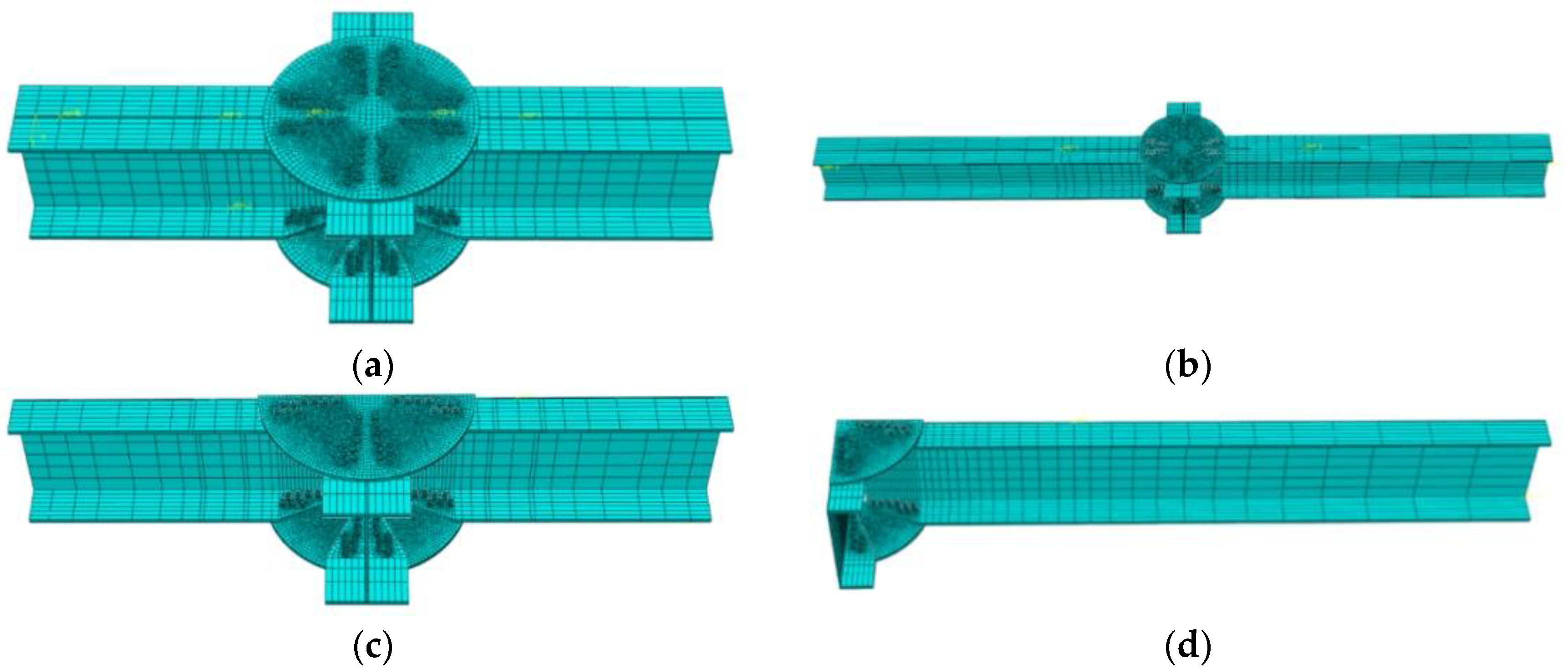
2.2. Verification Method
2.3. Verification Results
3. The FE Analysis Model
3.1. Geometric Dimensions
3.2. Element Type and Interaction
3.3. Material Properties
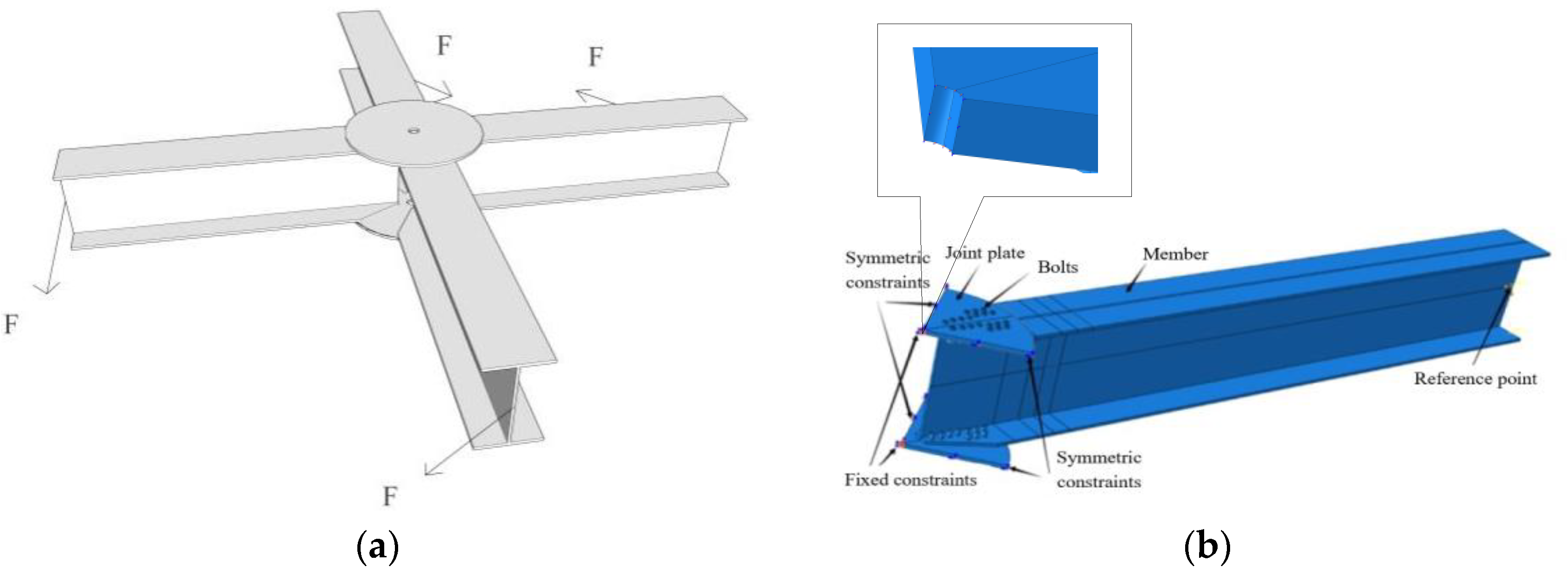
3.4. Boundary Conditions and Loading Scheme
4. Flexural Performance of AAG Joints
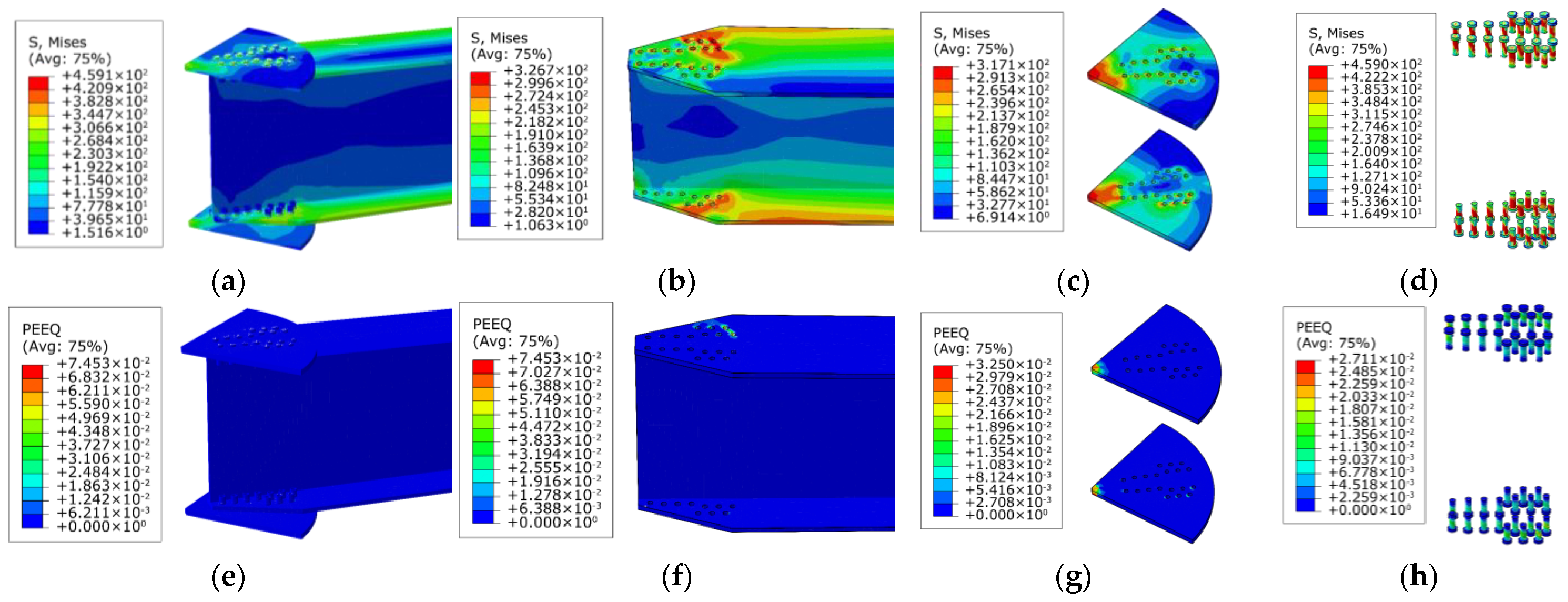
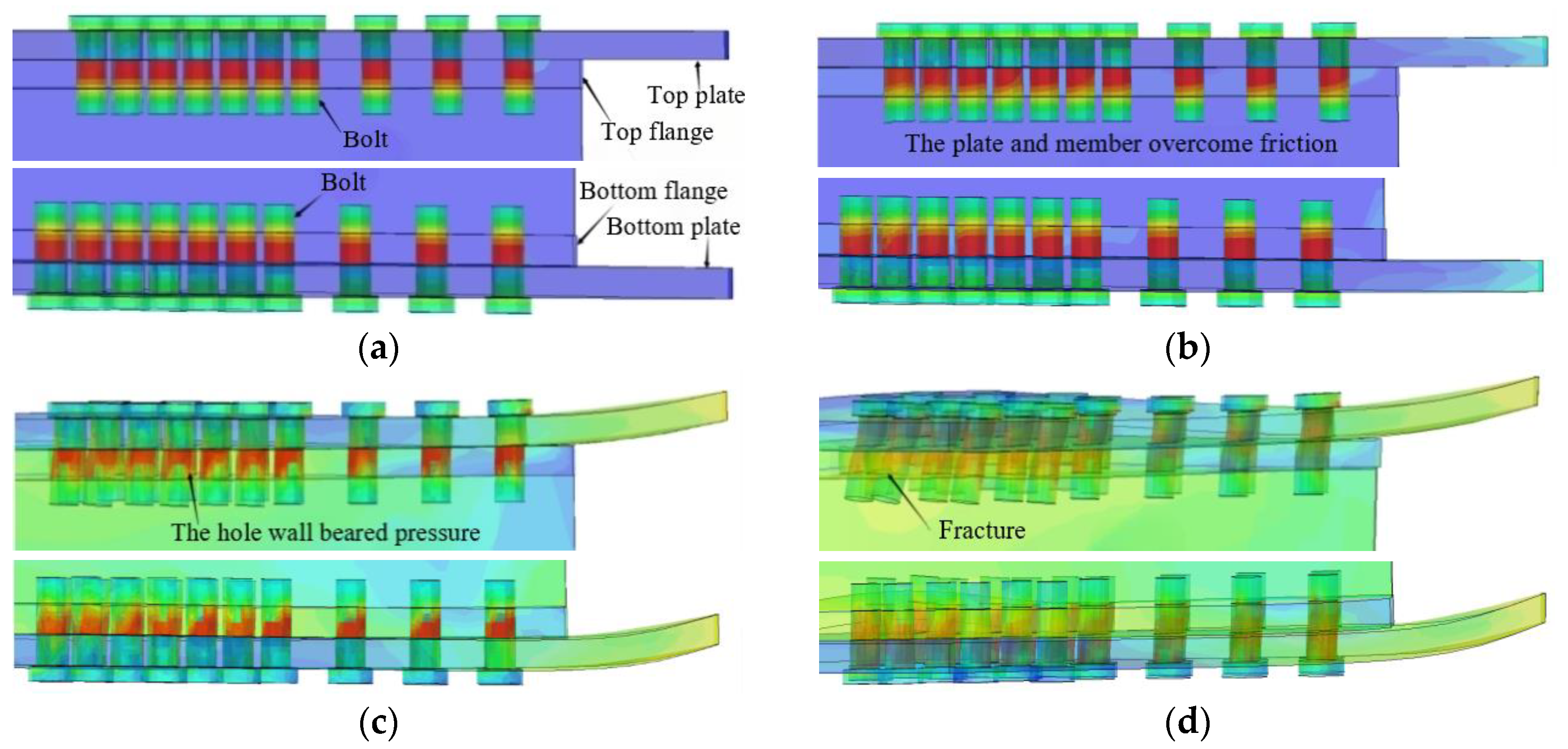
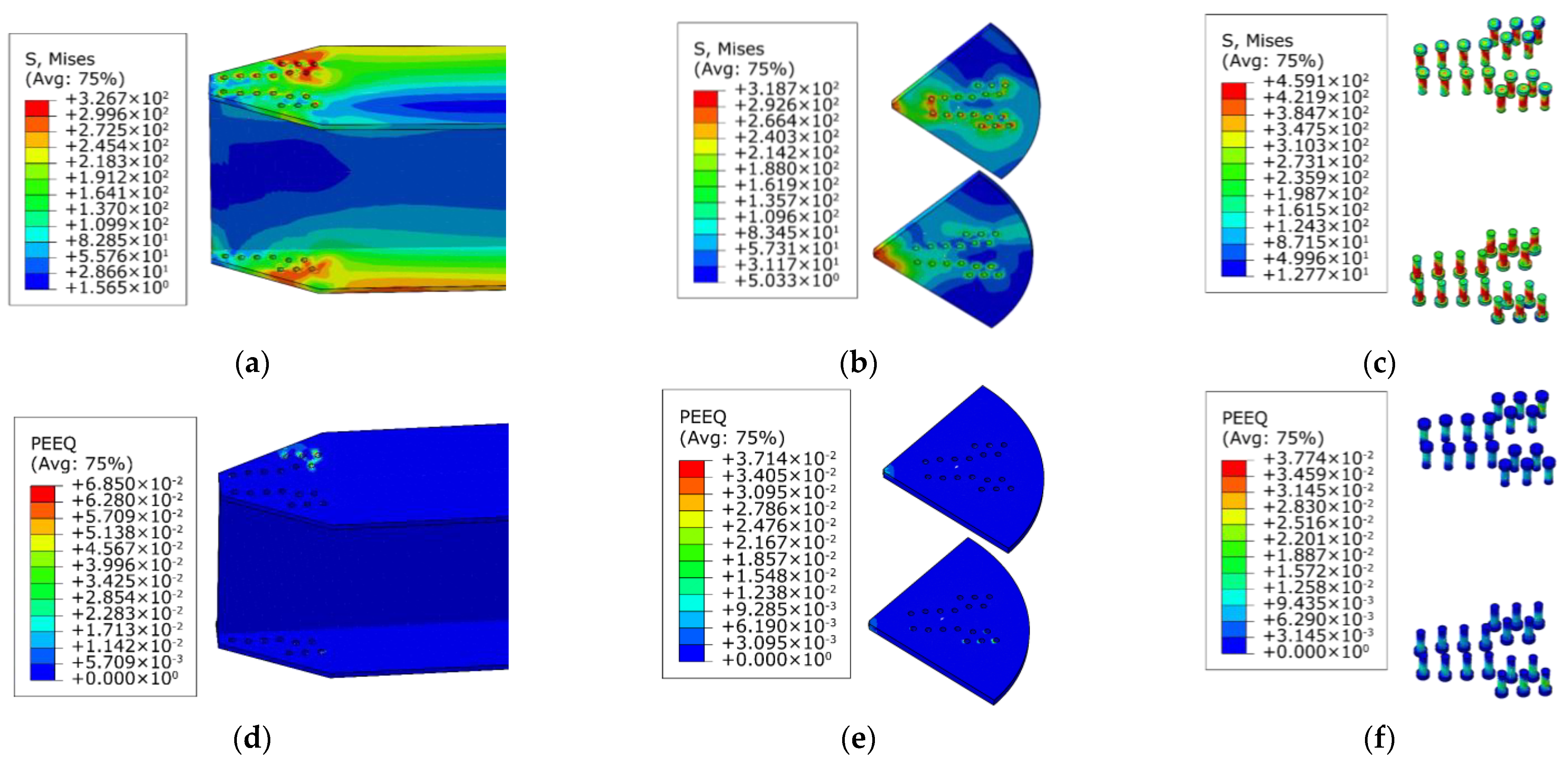
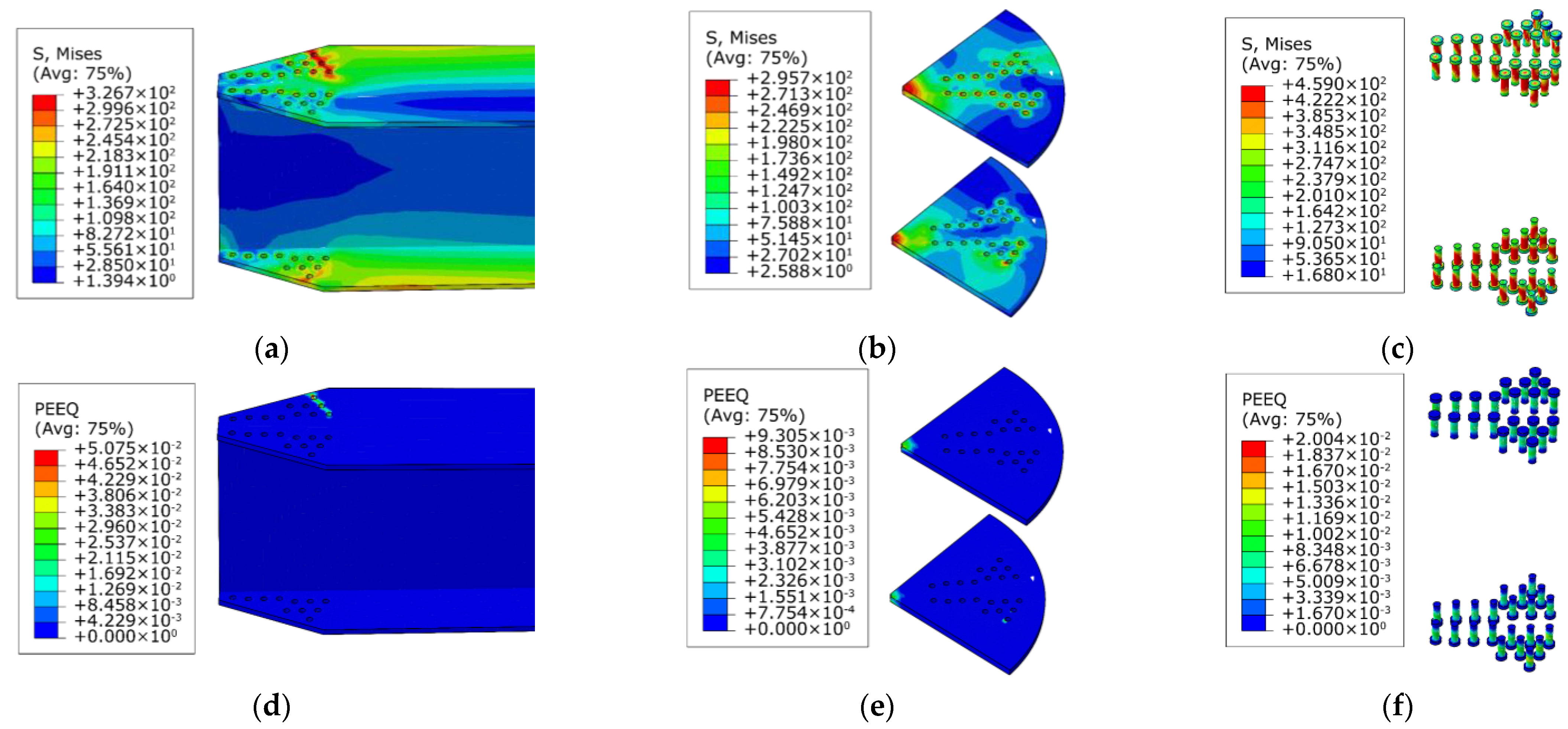
4.1. Failure Mode
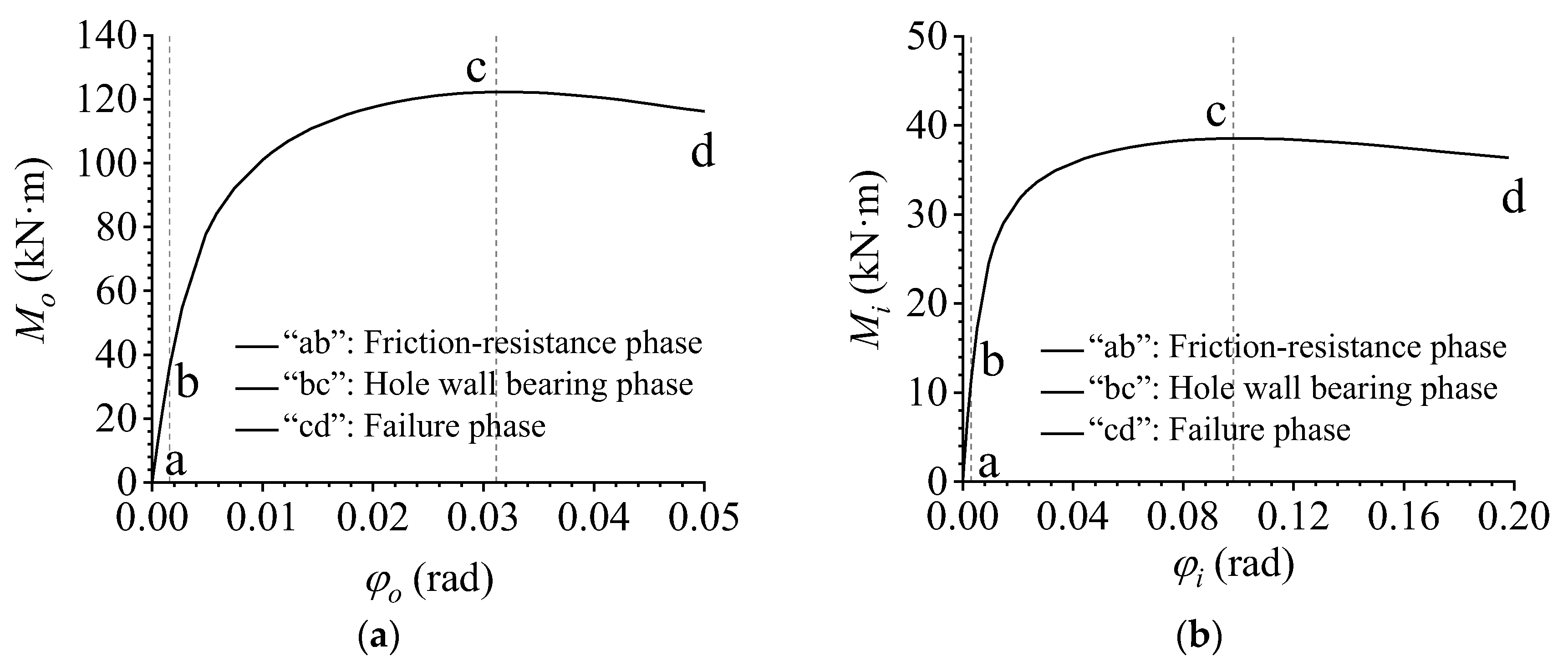
4.2. Deformation Process and M–φ Curves
5. Parametric Analyses
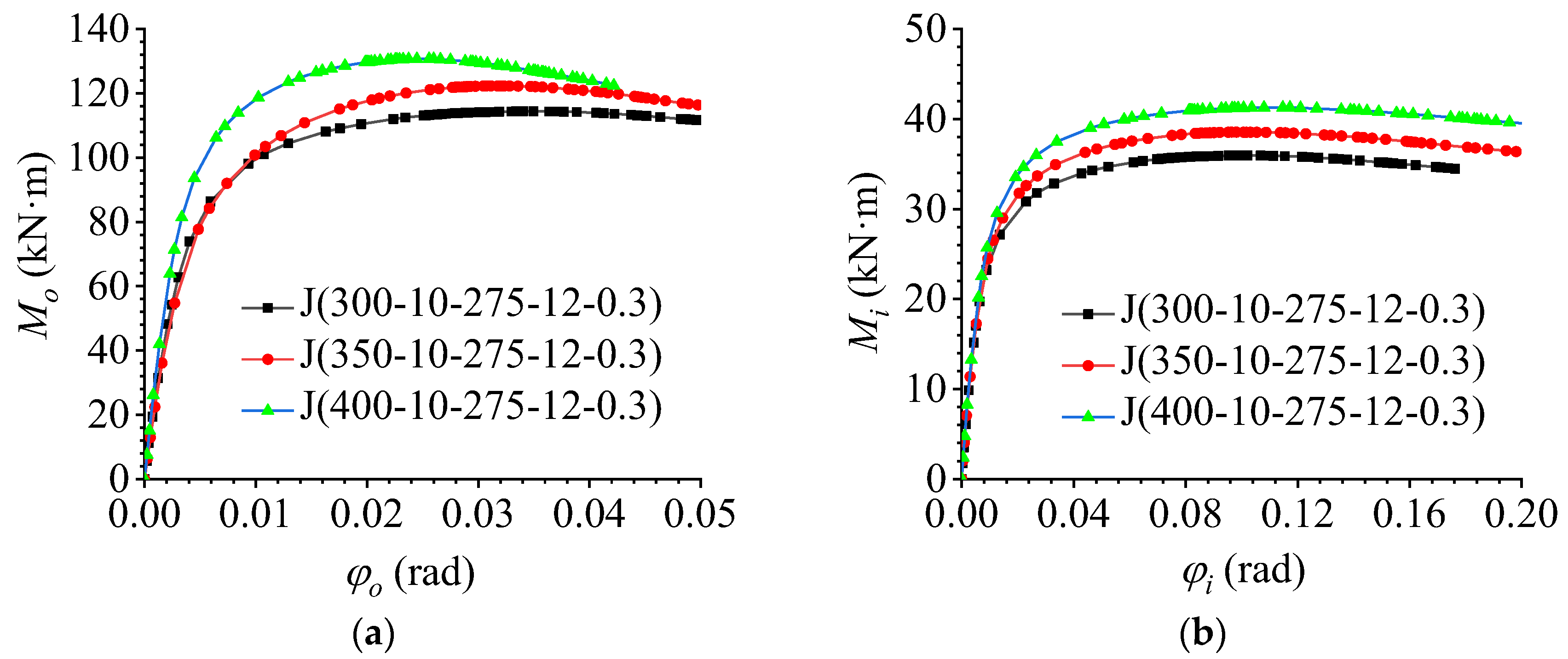
5.1. Effect of the Member Height
5.2. Effect of the Number of Bolts
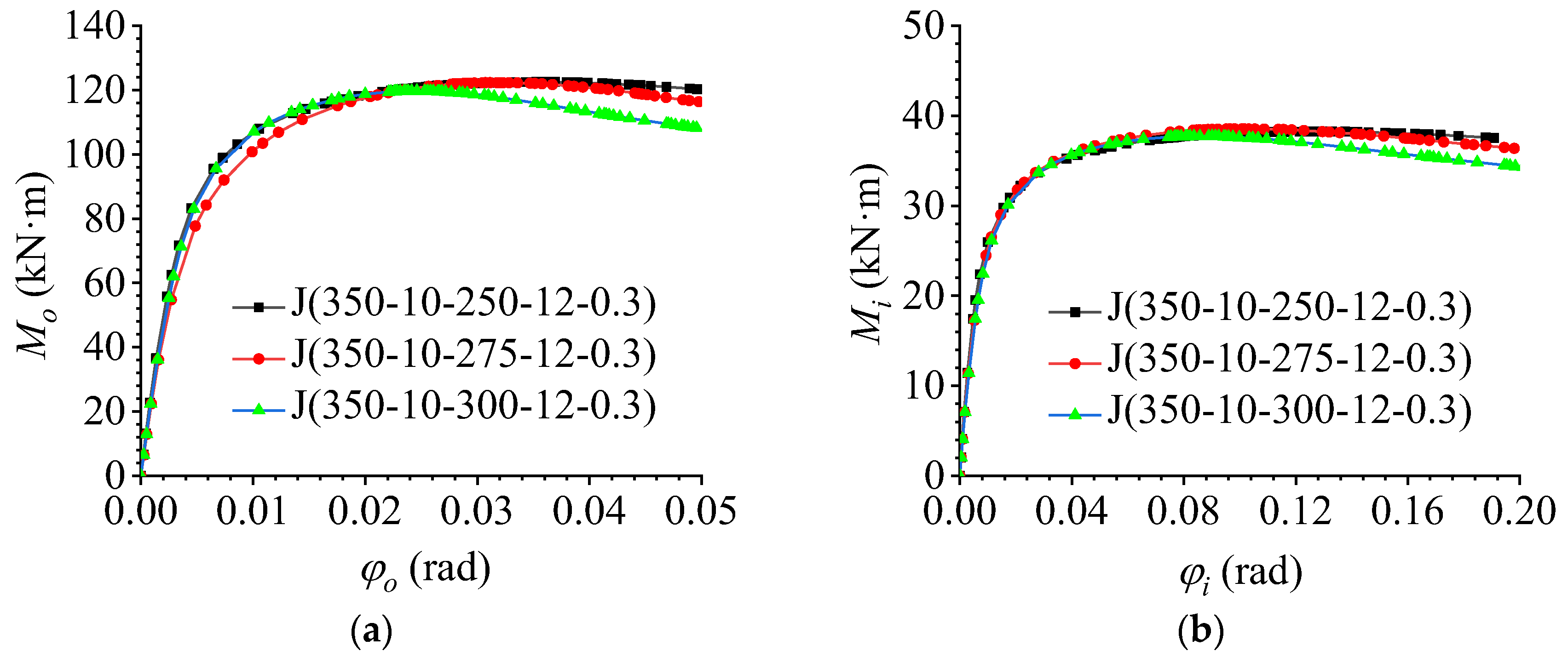
5.3. Effect of Joint Plate Radius
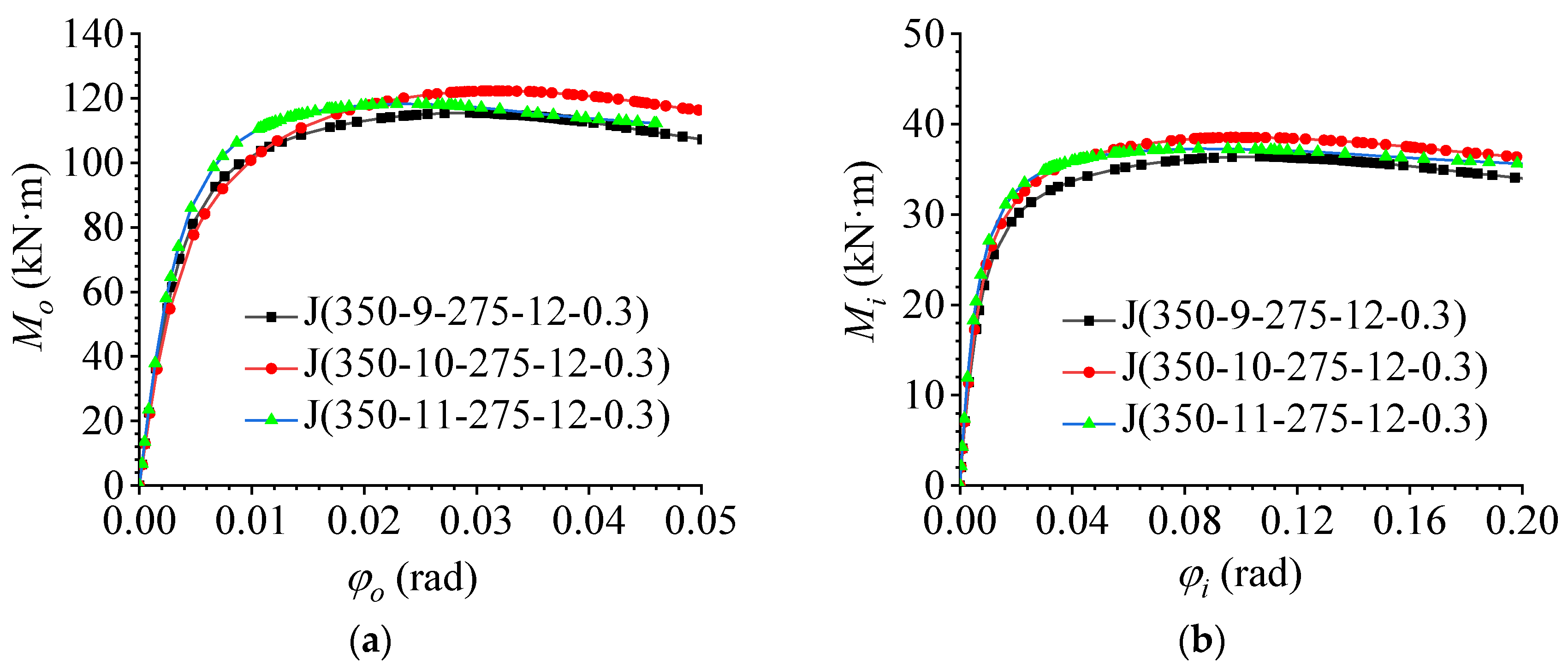
5.4. Effect of the Thickness of Joint Plate
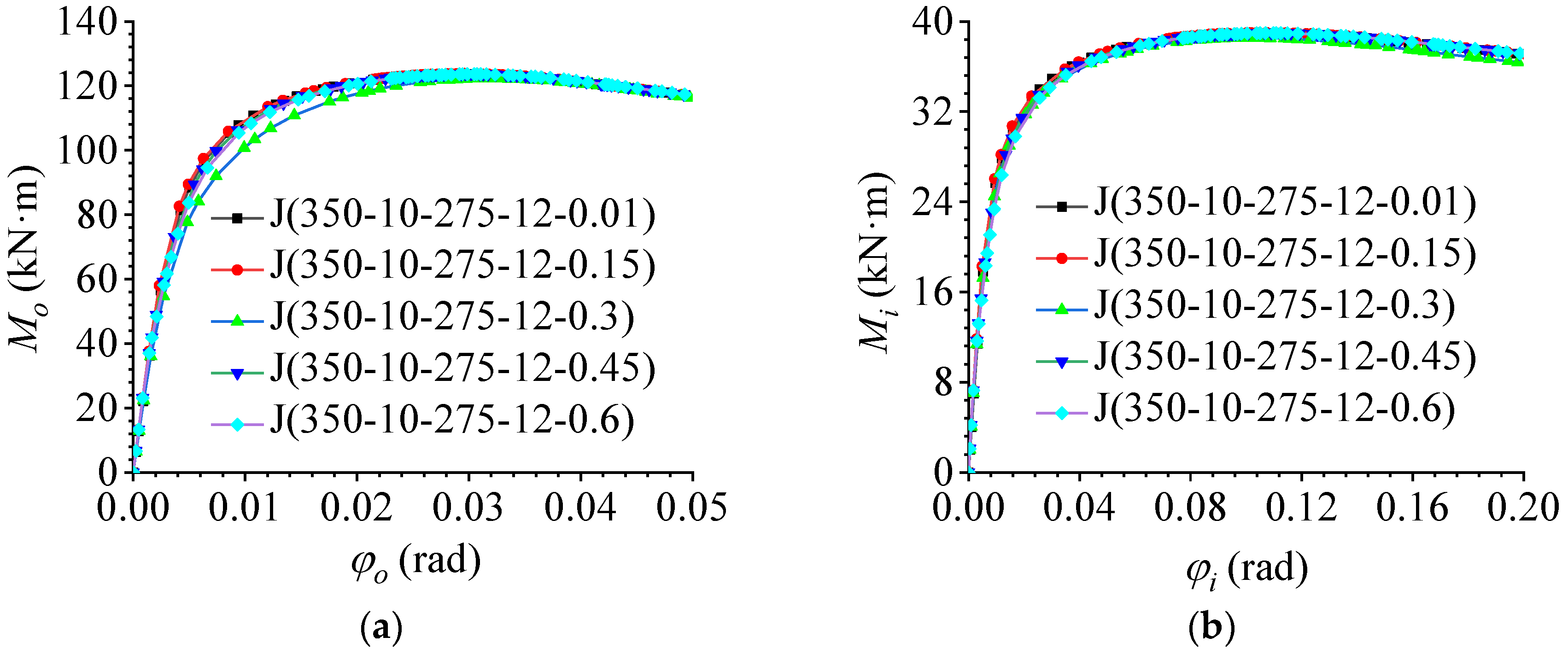
5.5. Effect of Bolt Preload Force
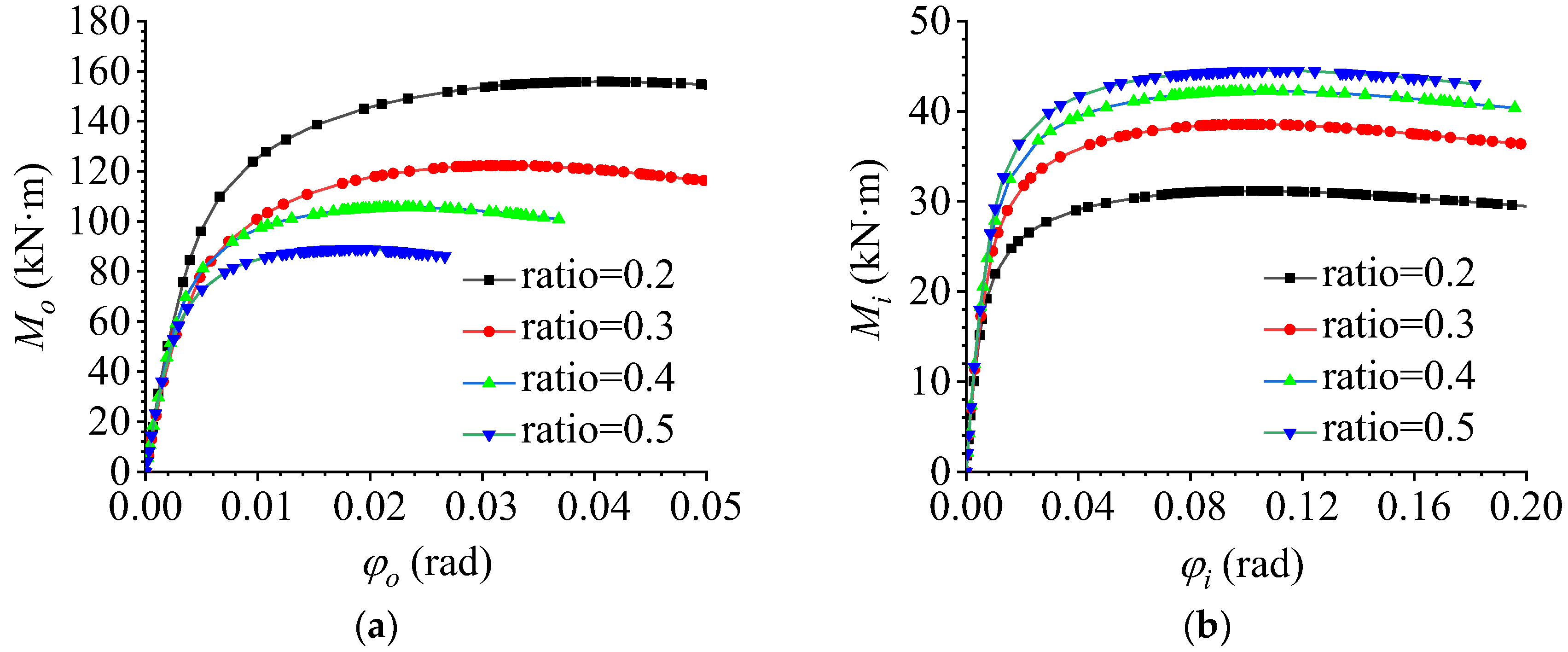
5.6. Effect of the Ratio of In-Plane to Out-of-Plane Bending Moments
6. Conclusions
- When subjected to shear force and bending moments, the failure of AAG joints mainly occurs at the bolt holes on the tension flange of the rod. Based on the bending moment-rotation relationships, three phases of AAG joint deformation are proposed: the friction resistance phase, the hole wall bearing phase, and the failure phase.
- With an increase in the member section height, the out-of-plane bending stiffness of the AAG joint and the ultimate flexural capacity in and out of the plane increase, whereas the in-plane bending stiffness remains unchanged.
- An increase in the number of bolts increases the in-plane and out-of-plane bending stiffnesses of the joint. However, as the number of bolts also changes the bolt arrangement, the most unfavorable position of the joint is weakened; thus, the load capacity first increases and then decreases.
- With an increase in the thickness of the joint plate, the out-of-plane flexural performance of the AAG joint improves to some extent, while the in-plane flexural performance remains unchanged. In addition, the joint plate radius and bolt preload force have little effect on the flexural performance of AAG joints.
- Increasing the ratio of the in-plane and out-of-plane bending moments reduces the out-of-plane bending capacity and improves the in-plane bending capacity, but it does not significantly affect the in-plane and out-of-plane bending stiffness of the AAG joints.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, P.; Wang, H. A novel strategy for the crossarm length optimization of PSSCs based on multi-dimensional global optimization algorithms. Eng. Struct. 2021, 238, 112238.1–112238.11. [Google Scholar] [CrossRef]
- Kashaev, N.; Ventzke, V.; Am, G. Prospects of laser beam welding and friction stir welding processes for aluminum airframe structural applications. J. Mater. Process. Technol. 2018, 36, 571–600. [Google Scholar] [CrossRef]
- Brimelow, E.I. Aluminium in Building; Macdonald: London, UK, 1957; p. 28. [Google Scholar]
- Guo, X.; Liang, S.; Shen, Z. Experiment on aluminum alloy members under axial compression. Front. Struct. Civ. Eng. 2015, 9, 48–64. [Google Scholar] [CrossRef]
- Adeoti, G.O.; Fan, F.; Wang, Y.; Zhai, X. Stability of 6082-T6 aluminium alloy columns with H-section and rectangular hollow sections. Thin Wall Struct. 2015, 89, 1–16. [Google Scholar] [CrossRef]
- Chang, Y.; Liu, M.; Wang, P. Interacted buckling failure of thin-walled irregular-shaped aluminum alloy column under axial compression. Thin Wall Struct. 2016, 107, 627–647. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, Y.; Chang, T.; Du, X.; Bu, Y.; Shi, Y. Local buckling and postbuckling strength of extruded aluminium alloy stub columns with slender I-sections. Thin Wall Struct. 2015, 90, 140–149. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhai, X.; Wang, J. Buckling behaviors and ultimate strengths of 6082–T6 aluminum alloy columns under eccentric compression-Part I: Experiments and finite element modeling. Thin Wall Struct. 2019, 143, 106207.1–106207.15. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhai, X.; Wang, J. Buckling behaviors and ultimate strength of 6082–T6 aluminum alloy columns with square and circular hollow sections under eccentric compression-Part II: Parametric study, design provisions and reliability analysis. Thin Wall Struct. 2019, 143, 106208.1–106208.17. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Hu, X.; Han, J.; Xing, H. Experimental study and parametric analysis on the stability behavior of 7A04 high-strength aluminum alloy angle columns under axial compression. Thin Wall Struct. 2016, 108, 305–320. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Rong, B. Experimental study and finite element analysis of initial imperfection on 7A04-T6 aluminum alloy circular hollow section column. Int. J. Steel Struct. 2021, 21, 1134–1143. [Google Scholar] [CrossRef]
- Yuan, L.; Zhang, Q.; Luo, X.; Ouyang, Y.; Yin, J. Shear resistance of aluminum alloy extruded H-Section beams. Thin Wall Struct. 2020, 159, 107219.1–107219.14. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhai, X. Bending strength and design methods of the 6082–T6 aluminum alloy beams with circular hollow sections. Structures. 2020, 25, 870–887. [Google Scholar] [CrossRef]
- Guo, X.; Xiong, Z.; Shen, Z. Flexural-torsional buckling behavior of aluminum alloy beams. Front. Struct. Civ. Eng. 2015, 9, 163–175. [Google Scholar] [CrossRef]
- Yasniy, P.V.; Mykhailyshyn, M.S.; Pyndus, Y.I.; Hud, M.I. Numerical analysis of natural vibrations of cylindrical shells made of aluminum alloy. Mater. Sci. 2020, 55, 502–508. [Google Scholar] [CrossRef]
- Ma, H.; Fan, F.; Wen, P.; Zhang, H.; Shen, S. Experimental and numerical studies on a single-layer cylindrical reticulated shell with semi-rigid joints. Thin Wall Struct. 2015, 86, 1–9. [Google Scholar] [CrossRef]
- Xiong, Z.; Guo, X.; Luo, Y.; Zhu, S. Elasto-plastic stability of single-layer reticulated shells with aluminium alloy gusset joints. Thin Wall Struct. 2017, 115, 163–175. [Google Scholar] [CrossRef]
- Xiong, Z.; Guo, X.; Luo, Y.; Zhu, S.; Liu, Y. Experimental and numerical studies on single-layer reticulated shells with aluminium alloy gusset joints. Thin Wall Struct. 2017, 118, 124–136. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhu, S.; Zou, X.; Guo, S.; Qiu, Y.; Li, L. Elasto-plastic buckling behaviour of aluminium alloy single-layer cylindrical reticulated shells with gusset joints. Eng. Struct. 2021, 242, 112562.1–112562.12. [Google Scholar] [CrossRef]
- Guo, X.; Zhu, S.; Jiang, S.; Zhang, C.; Chen, C. Fire tests on single-layer aluminum alloy reticulated shells with gusset joints. Structures 2020, 28, 1137–1152. [Google Scholar] [CrossRef]
- Nassiraei, H.; Lotfollahi-Yaghin, M.A.; Ahmadi, H. Structural behavior of tubular T/Y-joints with collar plate under static in-plane bending. J. Constr. Steel Res. 2016, 123, 121–134. [Google Scholar] [CrossRef]
- Nassiraei, H.; Lotfollahi-Yaghin, M.A.; Ahmadi, H.; Zhu, L. Static strength of doubler plate reinforced tubular T/Y-joints under in-plane bending load. J. Constr. Steel Res. 2017, 136, 49–64. [Google Scholar] [CrossRef]
- İpekoğlu, G.; Çam, G. Formation of Weld Defects in Cold Metal Transfer Arc Welded 7075-T6 Plates and its Effect on Joint Performance. IOP Conf. Ser. Mater. Sci. Eng. 2017, 629, 012007. [Google Scholar] [CrossRef]
- Guo, X.; Xiong, Z.; Luo, Y.; Qiu, L.; Liu, J. Experimental investigation on the semi-rigid behaviour of aluminium alloy gusset joints. Thin Wall Struct. 2015, 87, 30–40. [Google Scholar] [CrossRef]
- Guo, X.; Xiong, Z.; Luo, Y.; Xu, H. Experimental study on bearing capacity of aluminum alloy gusset joints. J. Tongji Univ. 2014, 42, 1024–1030. (In Chinese) [Google Scholar]
- Guo, X.; Xiong, Z.; Luo, Y.; Xu, H. Initial stiffness of aluminum alloy gusset joints. J. Tongji Univ. 2014, 42, 1161–1166. (In Chinese) [Google Scholar]
- Guo, X.; Xiong, Z.; Luo, Y.; Xu, H.; Qiu, L. Theoretical Analysis of Bending Stiffness of aluminum alloy gusset joints. J. Build. Struct. 2014, 35, 144–150. (In Chinese) [Google Scholar]
- Xiong, Z.; Guo, X.; Luo, Y.; Xu, H. Numerical analysis of aluminium alloy gusset joints subjected to bending moment and axial force. Eng. Struct. 2017, 152, 1–13. [Google Scholar] [CrossRef]
- Shi, M.; Xiang, P.; Wu, M. Experimental investigation on bending and shear performance of two-way aluminum alloy gusset joints. Thin Wall Struct. 2017, 122, 124–136. [Google Scholar] [CrossRef]
- Guo, X.; Zhu, S.; Liu, X.; Liu, L. Experimental study on hysteretic behavior of aluminum alloy gusset joints. Thin Wall Struct. 2018, 131, 883–901. [Google Scholar] [CrossRef]
- Xu, S.; Chen, Z.; Wang, X.; Mazzolani, F.M. Hysteretic out-of-plane behavior of the Temcor joint. Thin Wall Struct. 2015, 94, 585–592. [Google Scholar] [CrossRef]
- Wu, J.; Zang, M.; Sun, G.; Chen, S. Experimental study on the static performance of arched aluminium alloy gusset joints. Eng. Struct. 2021, 246, 113013. [Google Scholar] [CrossRef]
- Guo, X.; Xiong, Z.; Luo, Y. Experimental research on Joint Plate camber of Aluminum Alloy Plate Joints. In Proceedings of the 14th National Symposium on Modern Structural Engineering, Tianjin, China, 7 August 2014; pp. 216–221. (In Chinese). [Google Scholar]
- BS EN 1999-1-1; Eurocode 9: Design of Aluminum Structures. European Committee for Standardization: Brussels, Belgium, 2007.
- GB/T 50429-2007; Code for Design of Aluminium Structures. General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China: Beijing, China, 2007.
- DGJ08-95-2001; Technical Specification for Design and Construction of Alumium-Alloys Reticulated Structures. Shanghai Municipal Construction and Administration Commission: Shanghai, China, 2001.
- Zhang, J.; Zhao, J.; Xu, H. Stiffness analysis of single layer reticulated shell plate joints. Ind. Constr. 2005, 35, 88–90. (In Chinese) [Google Scholar]
- SteinHardt. Aluminum constructions in civil engineering. Aluminum 1971, 47, 131–139. [Google Scholar]
- Ramberg, W.; Osgood, W.R. Description of Stress-Strain Curves by Three Parameters; National Advisory Committee for Aeronautics: Moffett Field, CA, USA, 1943; Technical Note; pp. 1–22. [Google Scholar]
- GB/T 3098.6-2014; Mechanical Properties of Fasteners, Stainless Steel Bolts, Screws and Studs. China Machinery Industry Federation: Beijing, China, 2014.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Member section height “h” | 300, 350, and 400 mm |
| Number of bolts “n” | 9, 10, and 11 |
| Joint plate radius “r” | 250, 275, and 300 mm |
| Joint plate thickness “t” | 10, 12, and 14 mm |
| Bolt preload force “f” | 0.01, 0.15, 0.3, 0.45, and 0.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Li, J.; Li, P.; Zhong, L.; Zhang, X.; Li, C. Study on Flexural Performance of Aluminum Alloy Gusset Joints Subjected to Bending Moment and Shear Force. Materials 2023, 16, 2920. https://doi.org/10.3390/ma16072920
Wang H, Li J, Li P, Zhong L, Zhang X, Li C. Study on Flexural Performance of Aluminum Alloy Gusset Joints Subjected to Bending Moment and Shear Force. Materials. 2023; 16(7):2920. https://doi.org/10.3390/ma16072920
Chicago/Turabian StyleWang, Hao, Jialiang Li, Pengcheng Li, Li Zhong, Xiaoyue Zhang, and Chao Li. 2023. "Study on Flexural Performance of Aluminum Alloy Gusset Joints Subjected to Bending Moment and Shear Force" Materials 16, no. 7: 2920. https://doi.org/10.3390/ma16072920