
Shape Memory Alloy—Polymer Composites: Static and Fatigue Pullout Strength under Thermo-Mechanical Loading

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
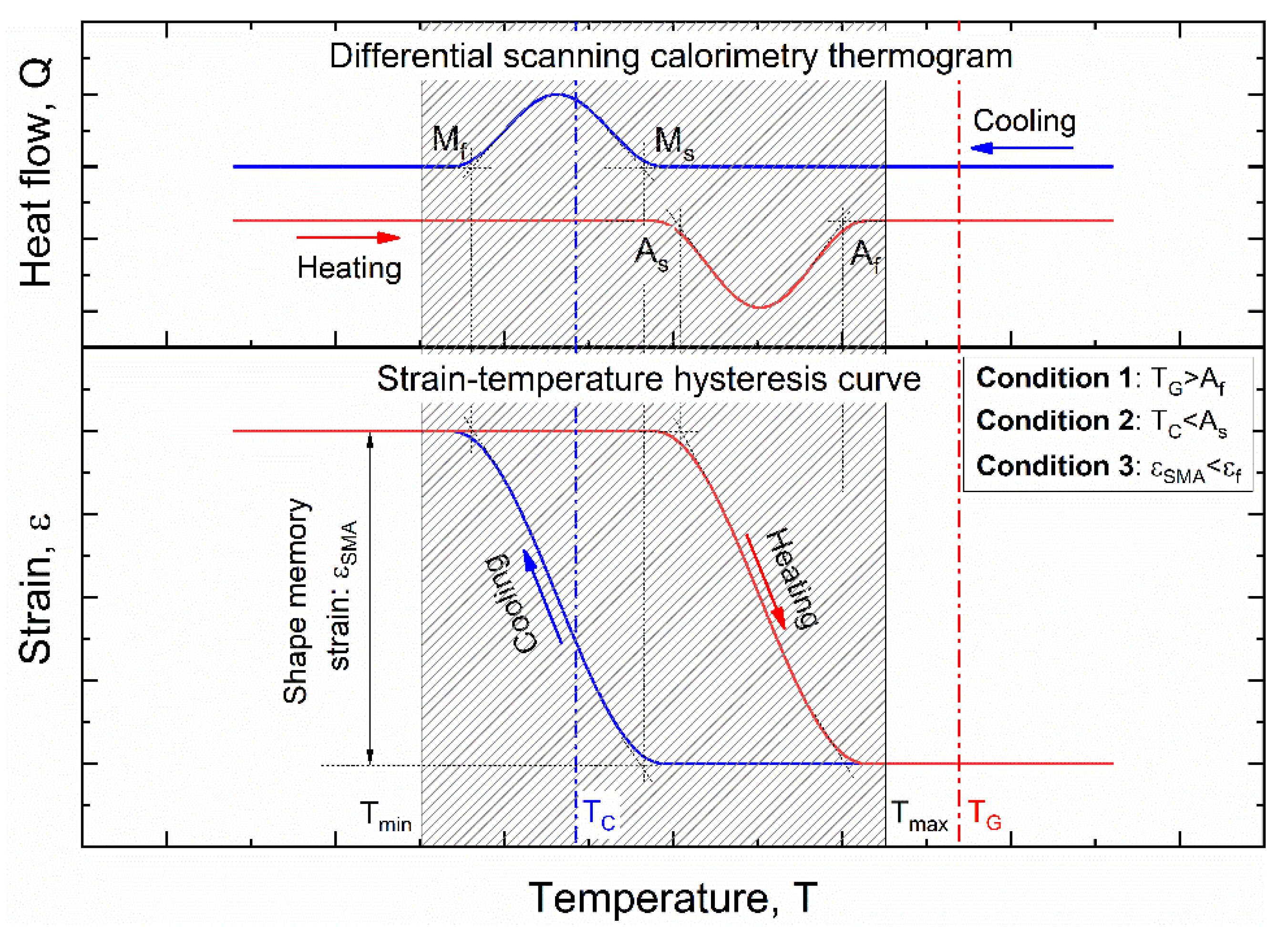
- Condition #1: The polymer curing temperature (TC) must be below the SMA activation temperature (Austenite start, As) to avoid early activation during polymer setting;
- Condition #2: The polymer glass transition temperature (TG) must be higher than the SMA activation temperature (Austenite finish, Af) to prevent composite damage during thermal activation;
- Condition #3: Mechanical strength of the polymer must be compatible with the stress–strain generated by shape memory recovery in SMA (εSMA).
2.1. Polymer Properties
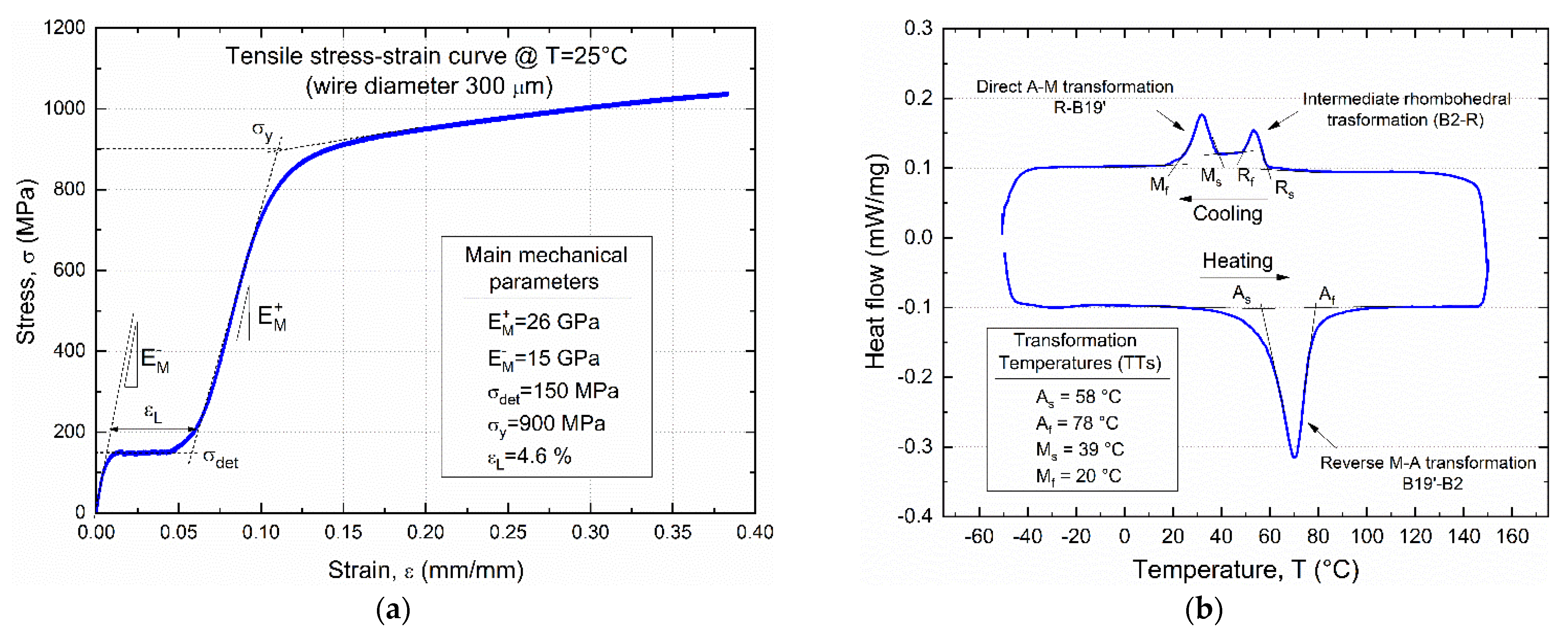
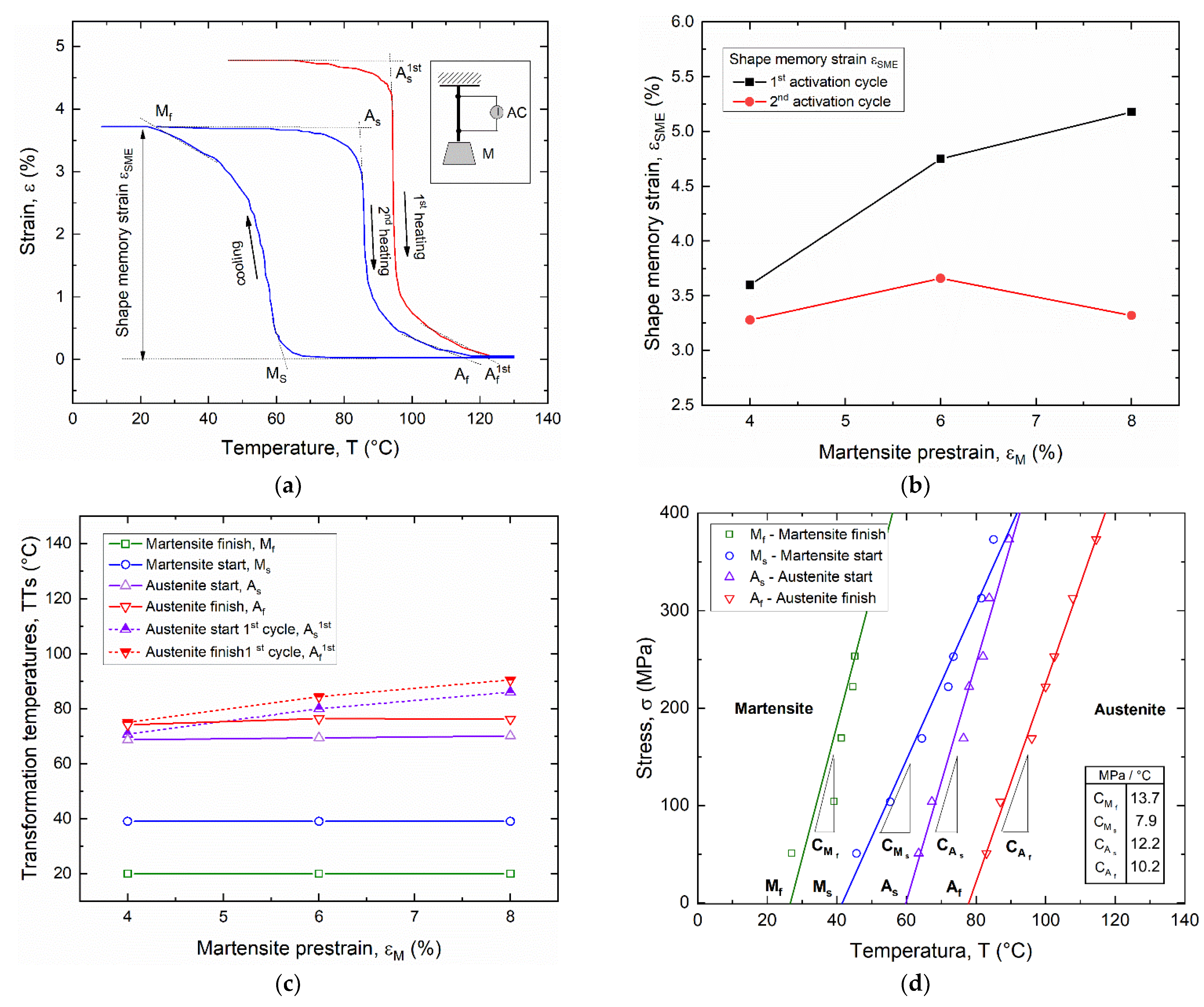
2.2. SMA Thermomechanical Properties
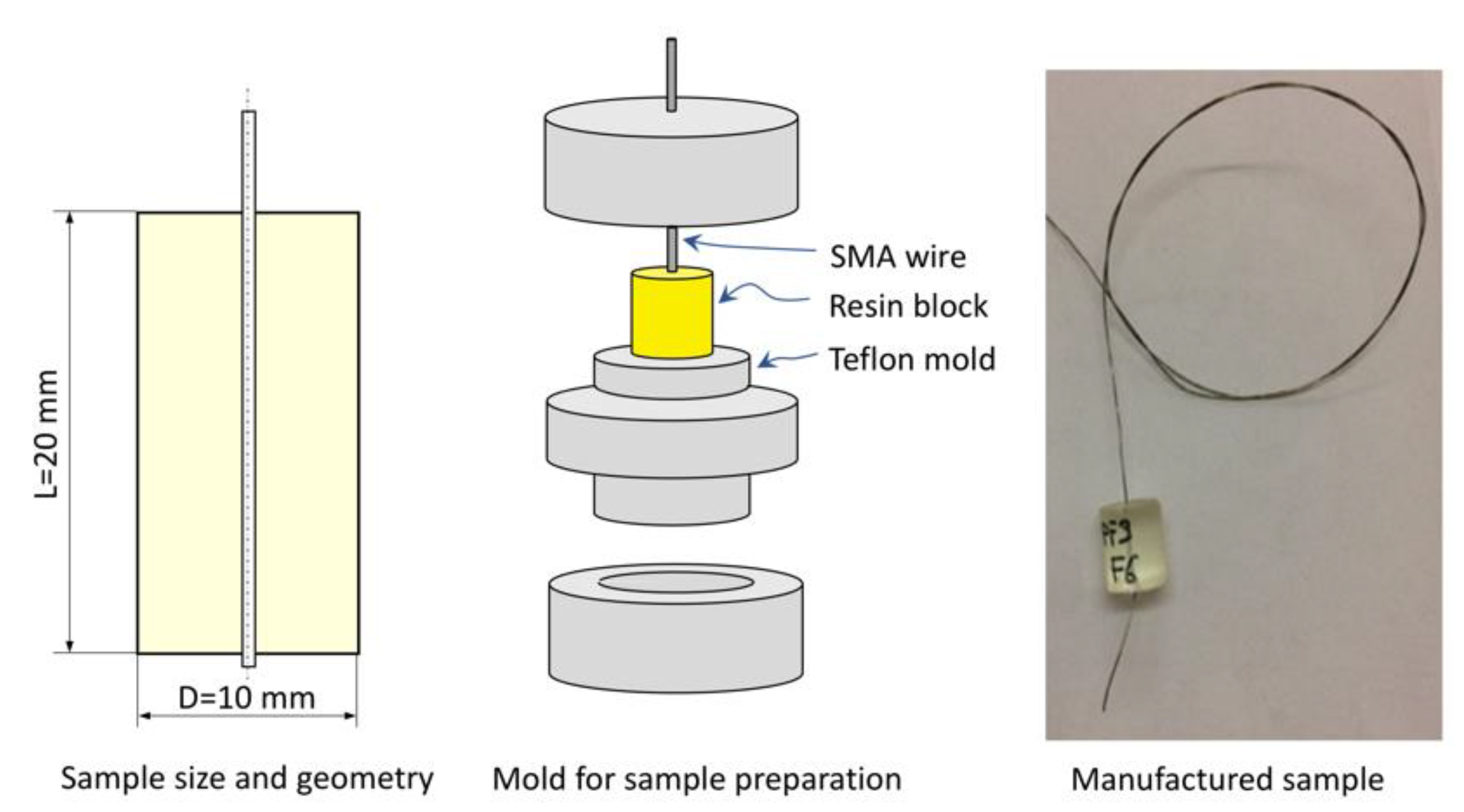
2.3. SMA–Polymer Sample Manufacturing
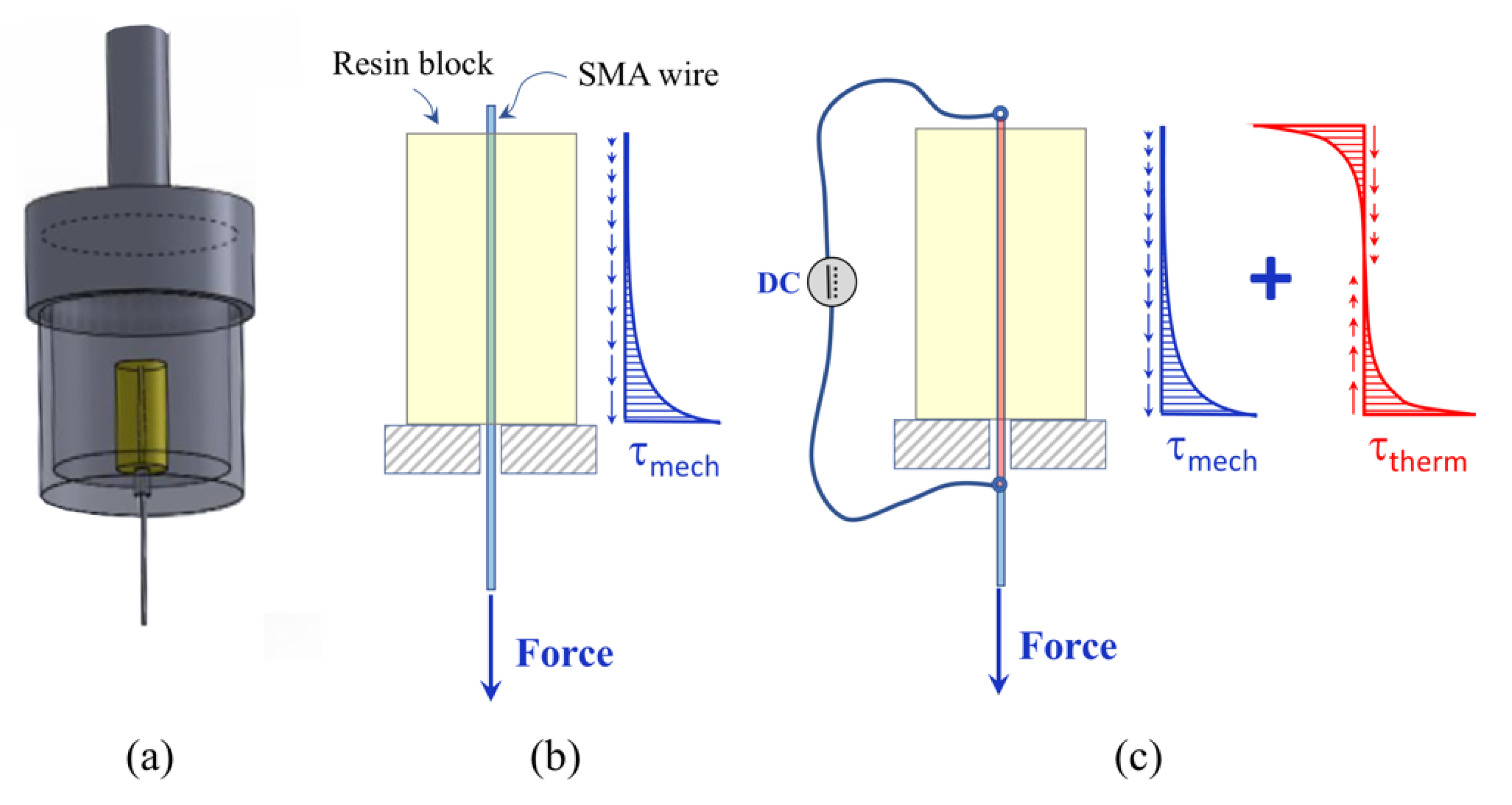
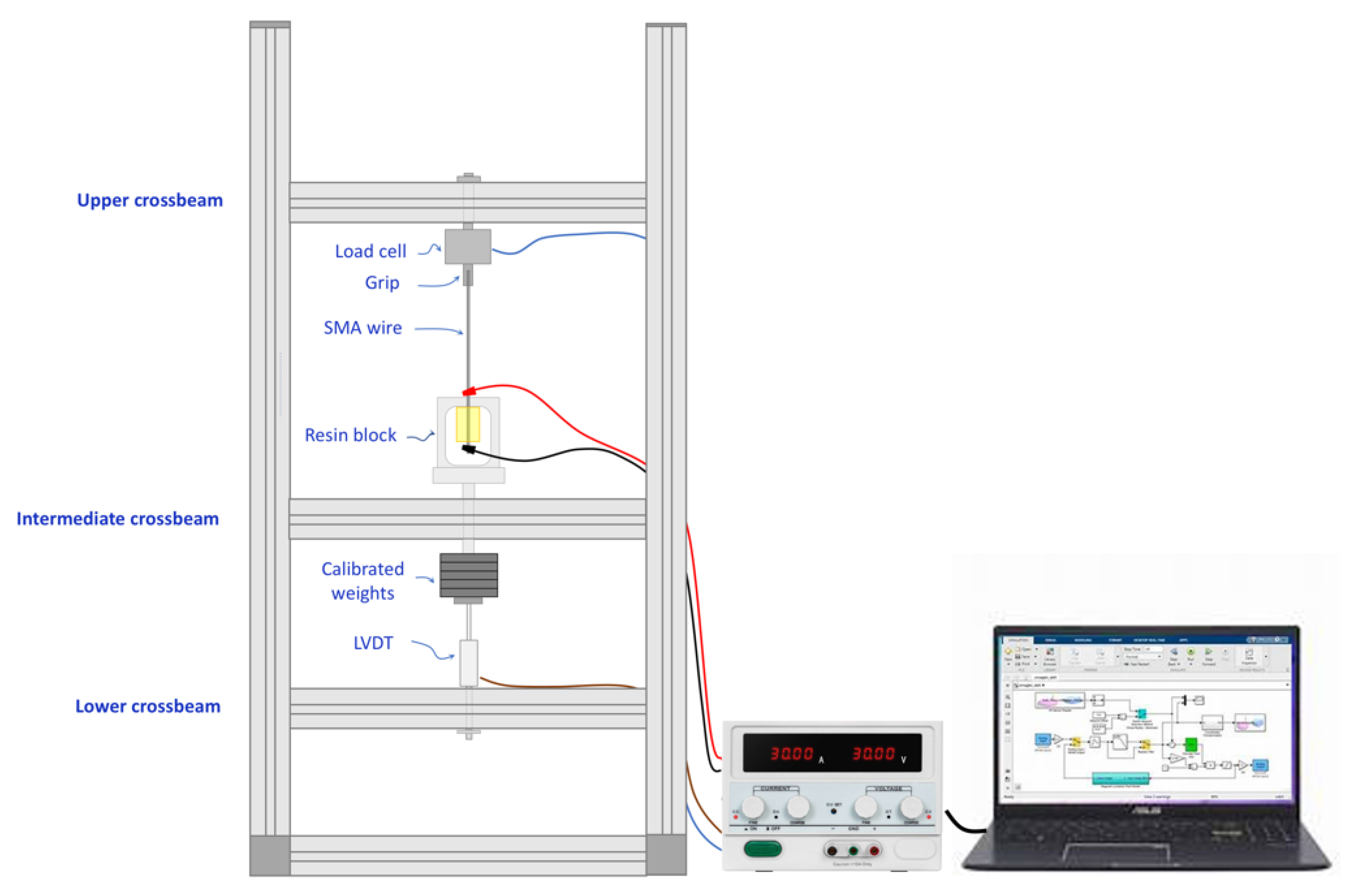
2.4. Static Pullout Tests
2.5. Thermo-Mechanical Fatigue Tests
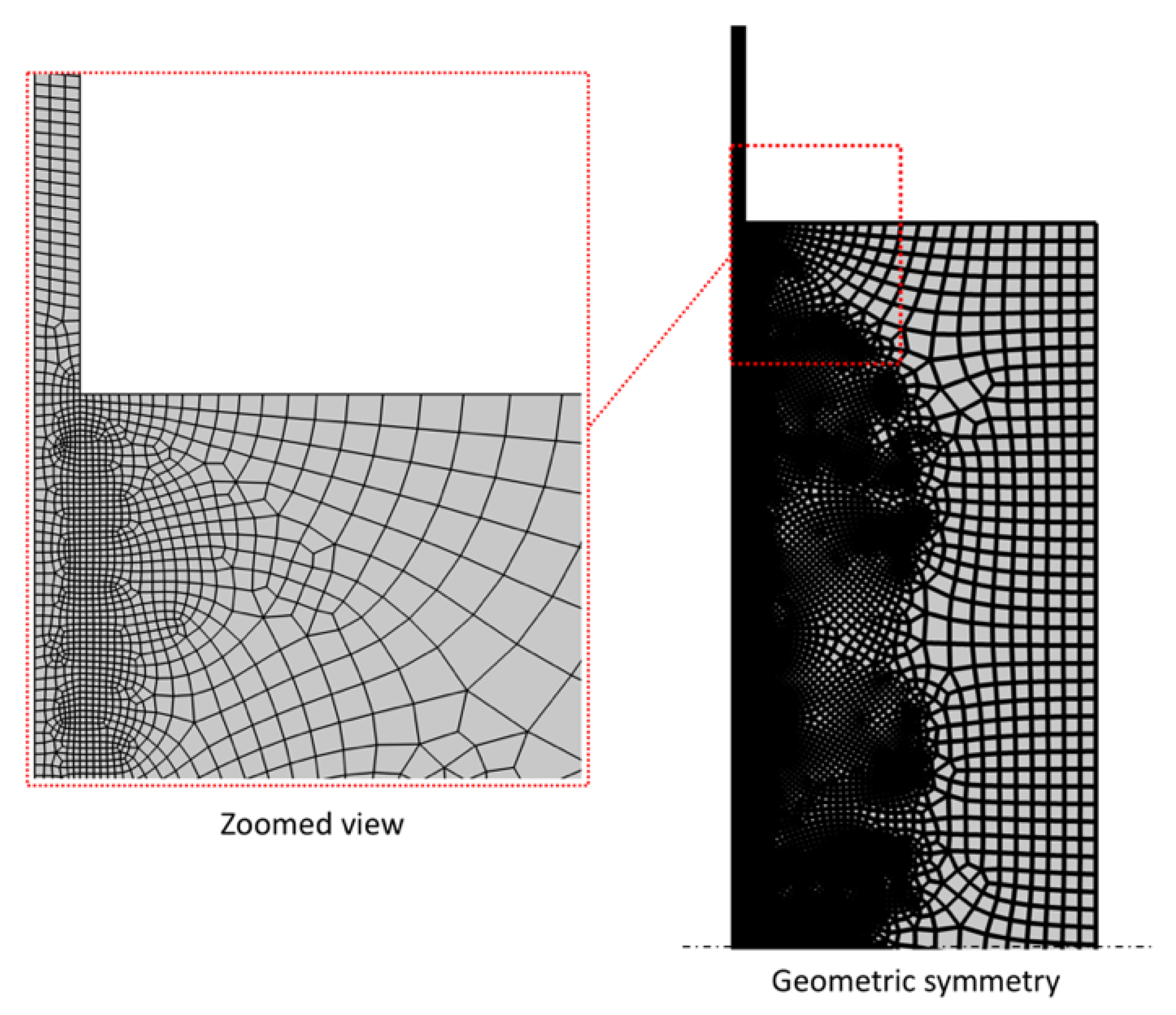
2.6. Numerical Modeling
3. Results and Discussions
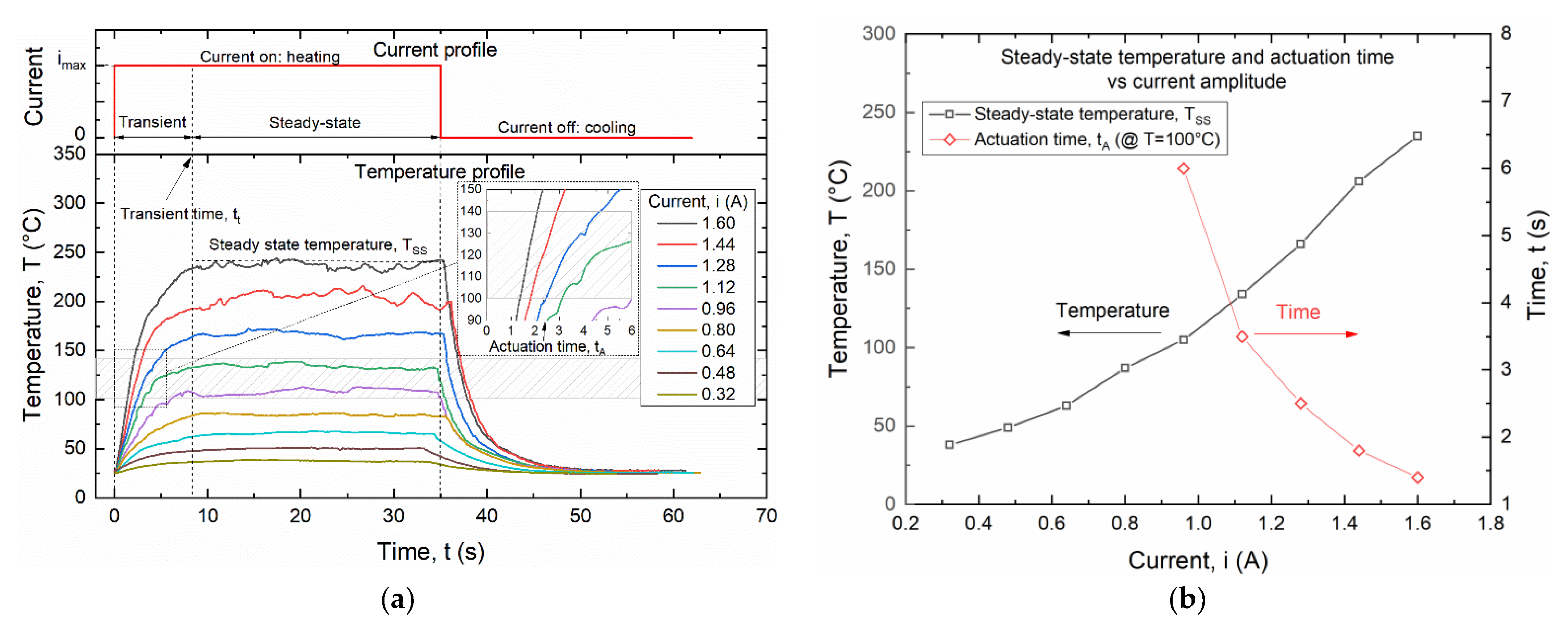
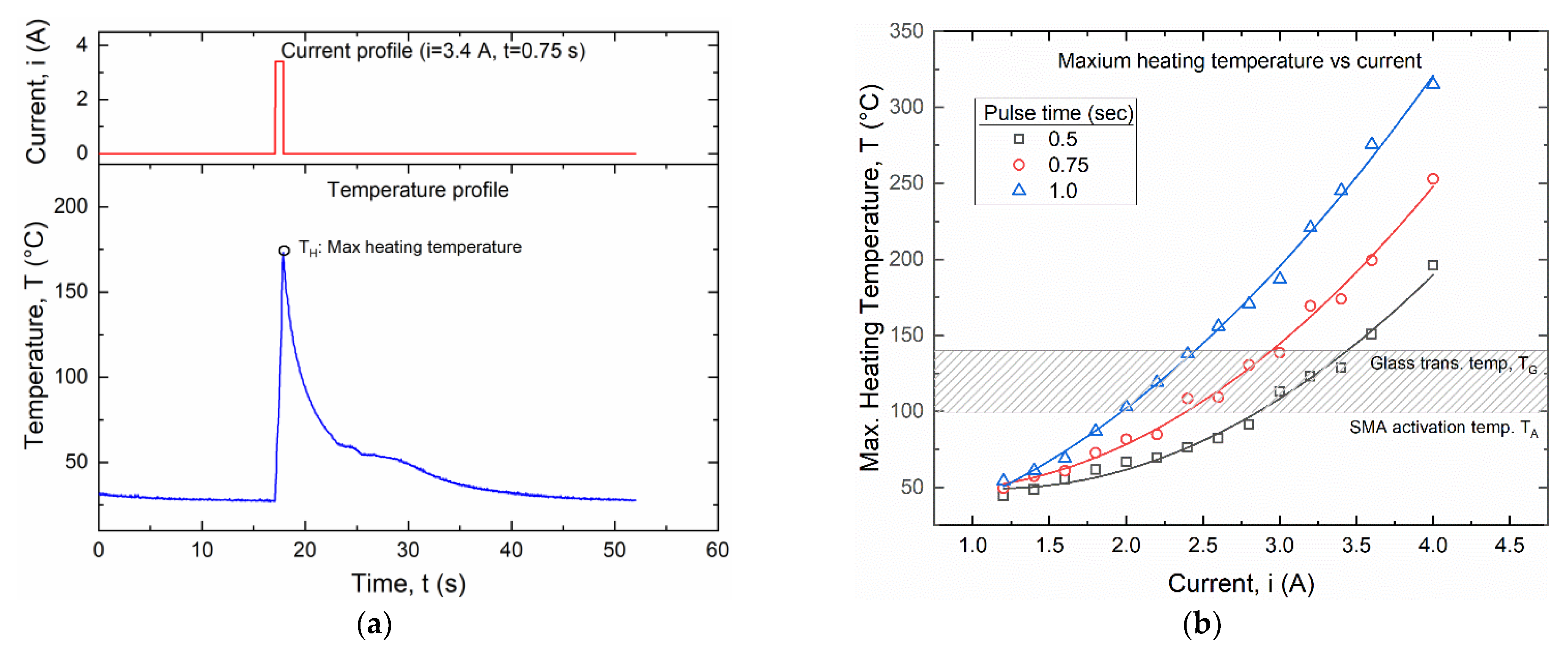
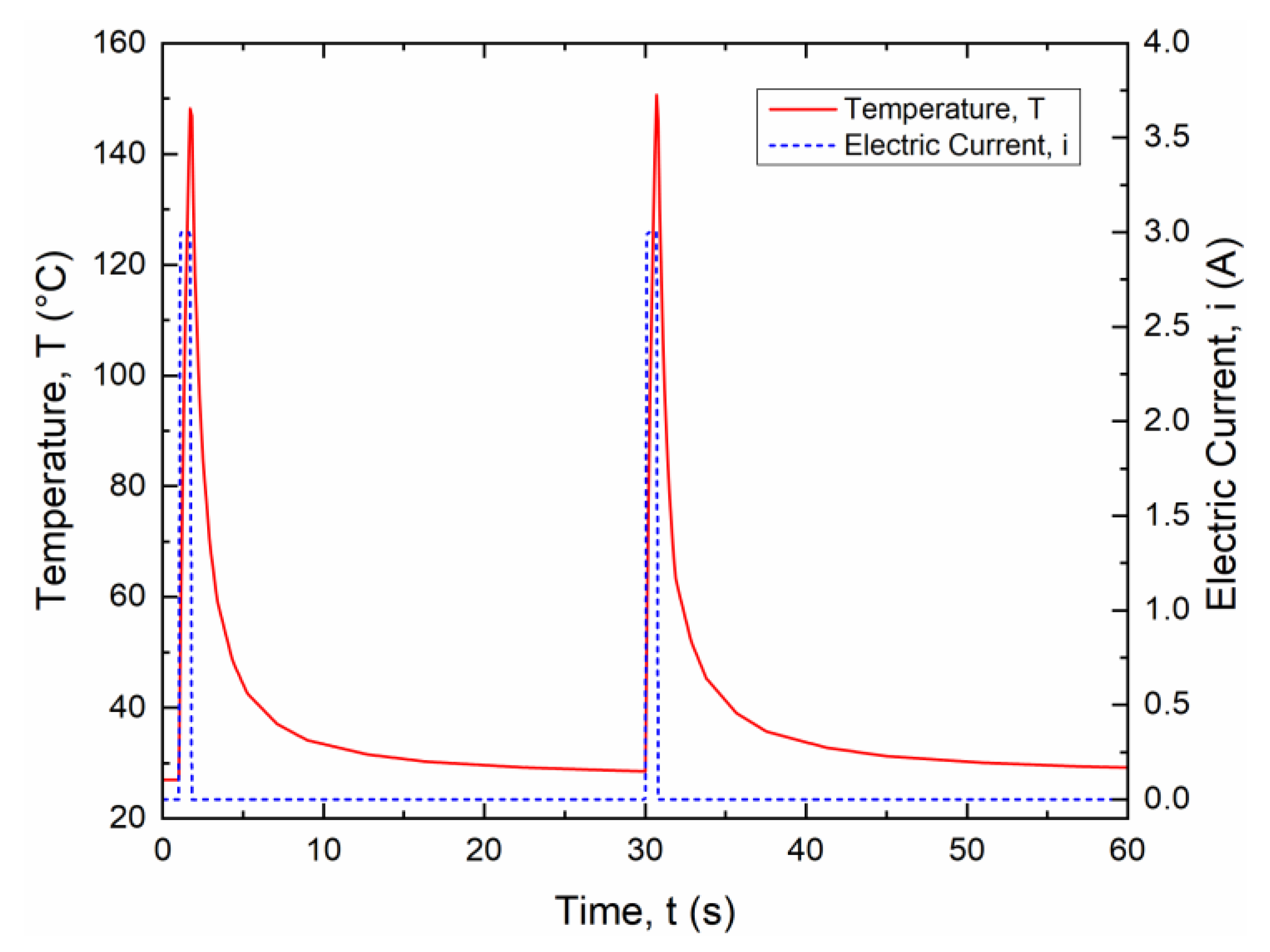
3.1. Electric Activation of SMA Wires
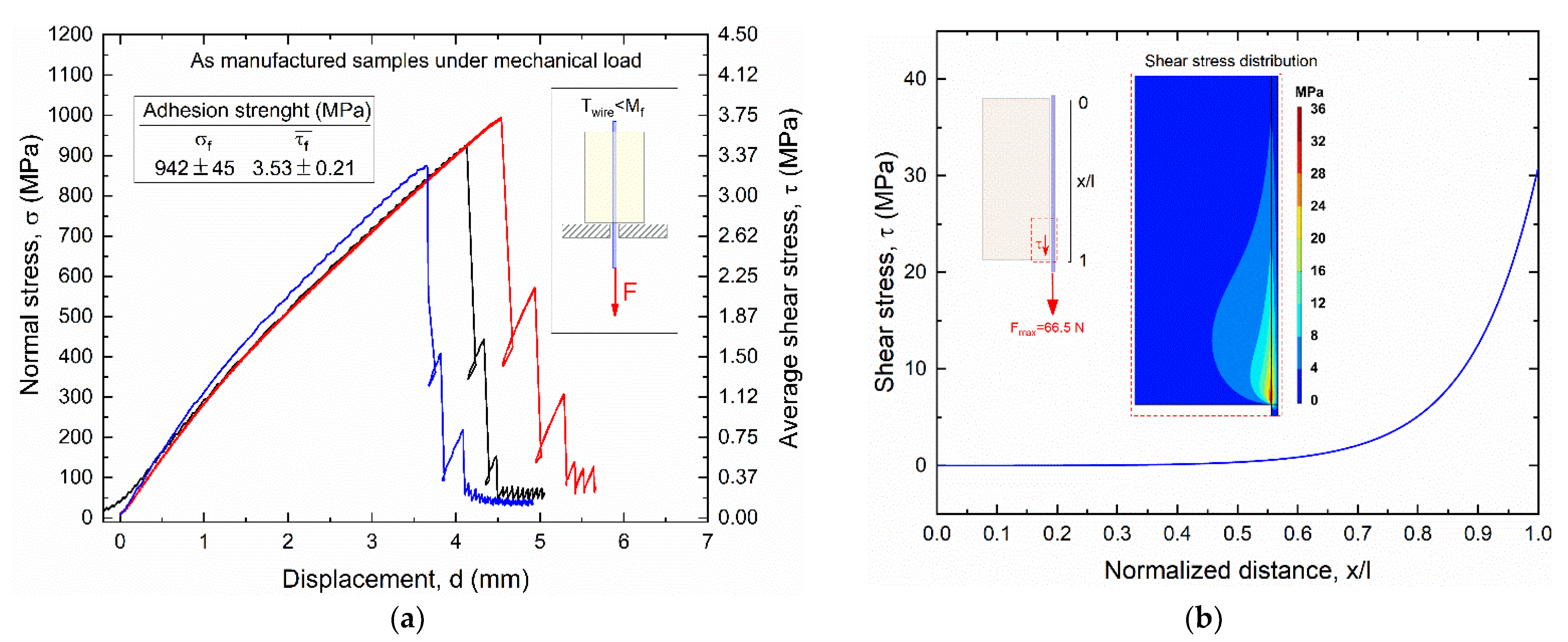
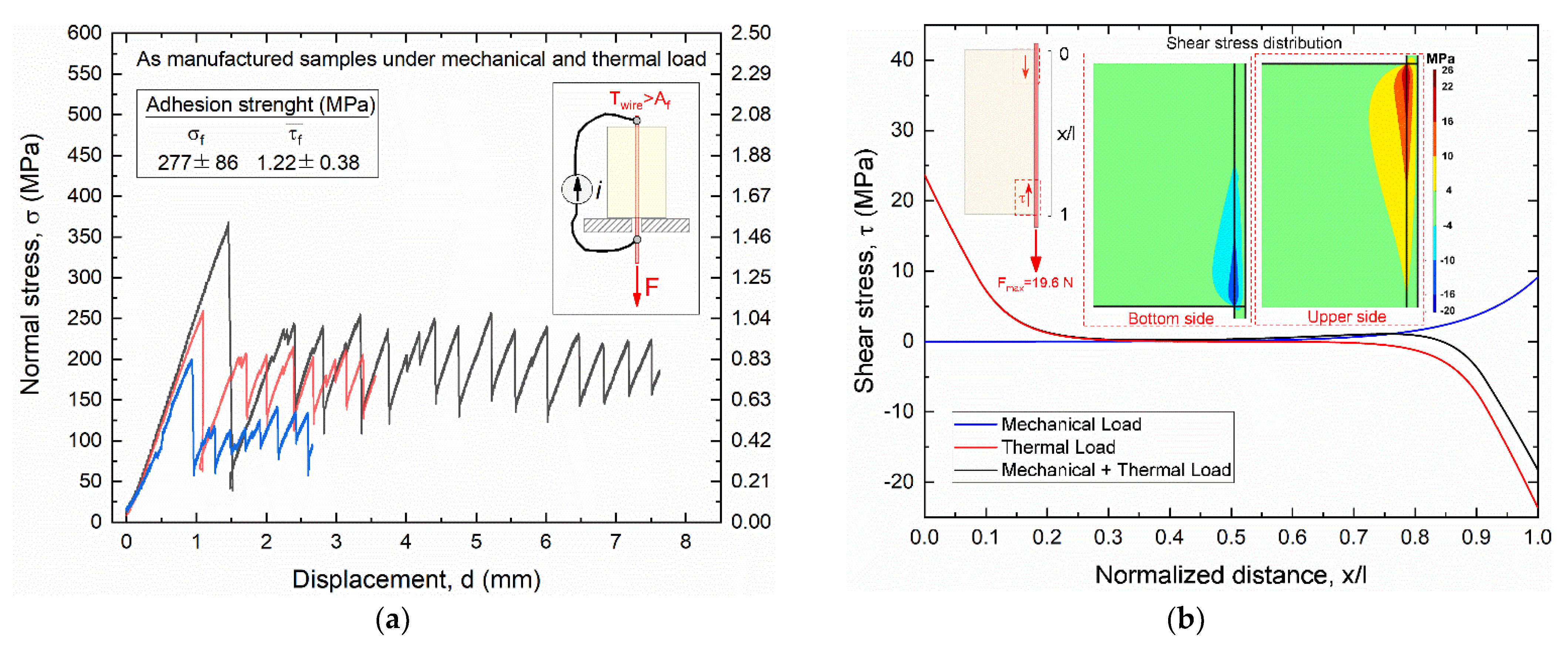
3.2. Static Mechanical Strength
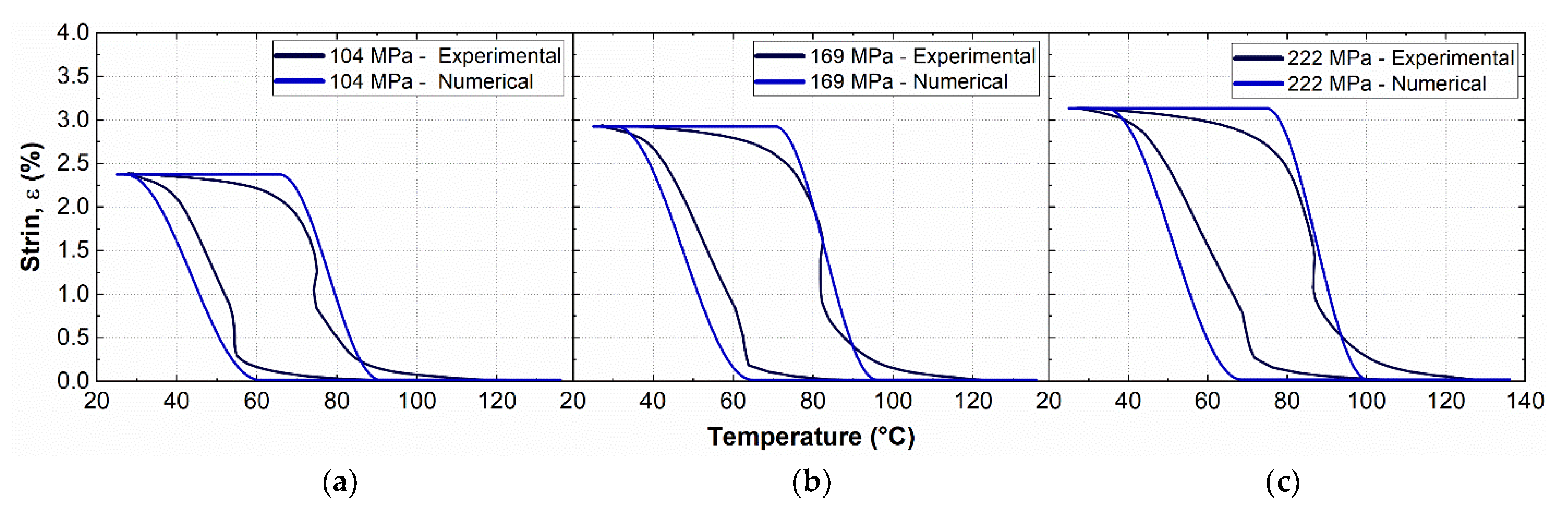
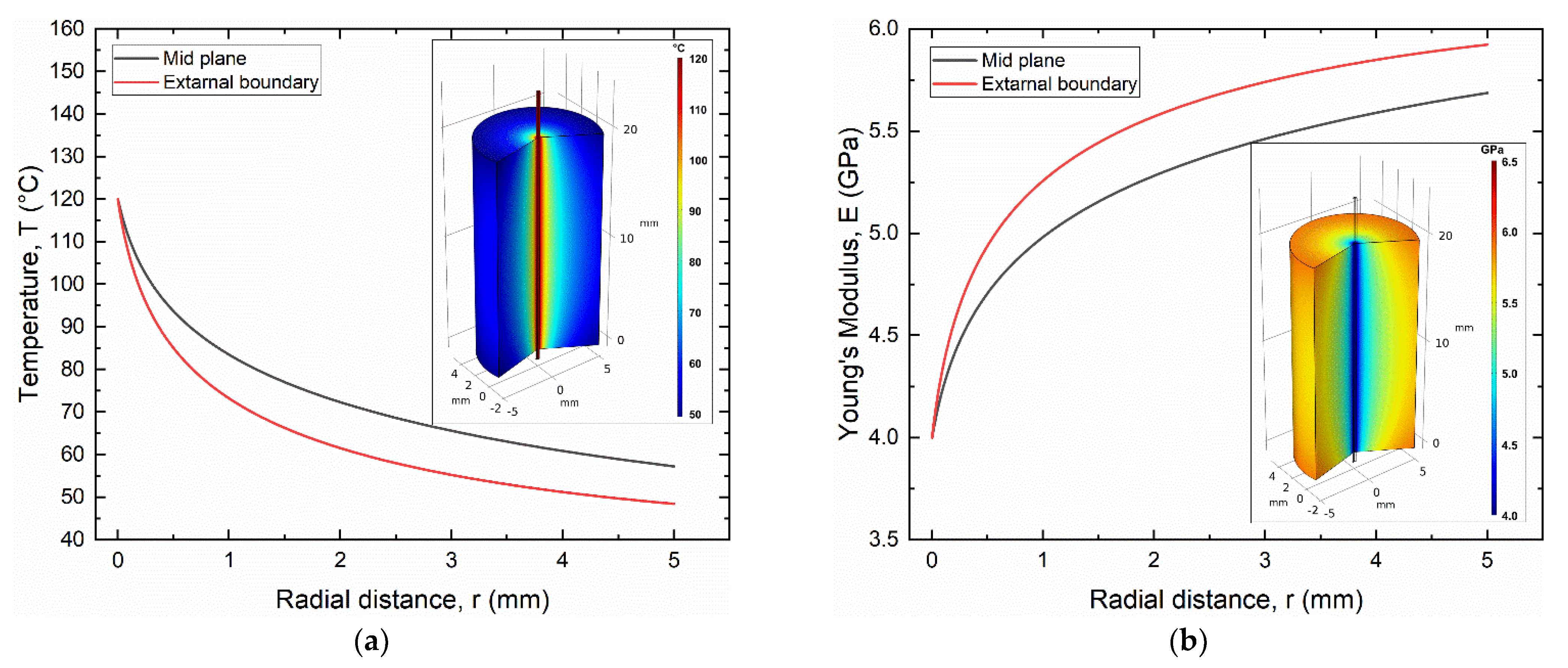
3.3. Static Thermo-Mechanical Strength
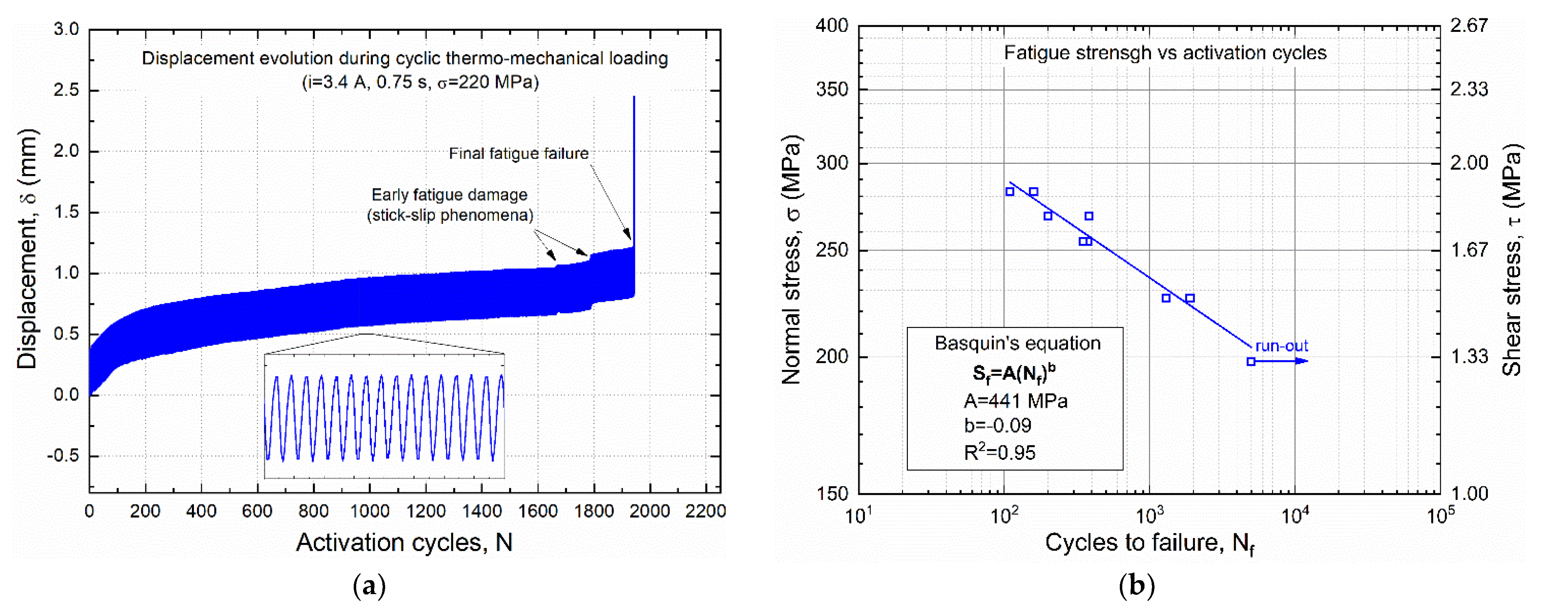
3.4. Thermo-Mechanical Fatigue
4. Conclusions
- Static pullout strength of samples subjected to mechanical load (around 900 MPa) is remarkably higher than the martensite reorientation stress and is close to the maximum recoverable stress of SMA wires;
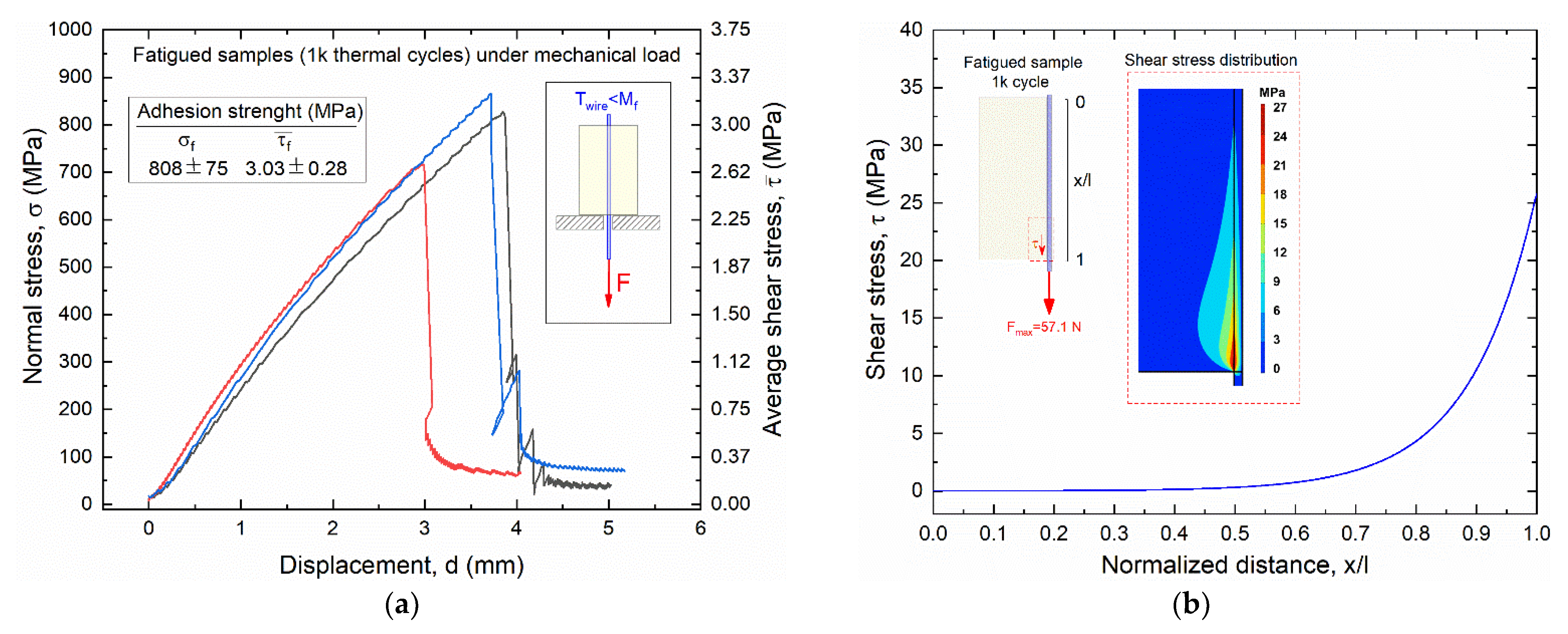
- Static pullout stress of the SMA–polymer samples are mainly unaffected by cyclic activation cycles (up to 1000). Maximum stress obtained from pullout tests is similar to that of manufactured samples;
- A marked reduction in pullout stress is observed under combined application of mechanical load and SMA thermal activation. This is attributed to the large interface stresses, which are due to both mechanical load and shape recovery in SMA, coupled with a reduction in polymer strength with increasing temperature;
- Fatigue strength corresponding to runout (5000 cycles) is still higher than the stress for martensite reorientation. This makes the SMA–polymer bi-material system suitable for repeated activations of morphable surfaces.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Concilio, A.; Antonucci, V.; Auricchio, F.; Lecce, L.; Sacco, E. Shape Memory Alloy Engineering, 2nd ed.; Butterworth-Heinemann Elsevier: Oxford, UK, 2021. [Google Scholar]
- Otsuka, K.; Ren, X. Physical metallurgy of Ti-Ni-based shape memory alloys. Prog. Mater. Sci. 2005, 50, 511–678. [Google Scholar] [CrossRef]
- Petrini, L.; Migliavacca, F. Biomedical applications of shape memory alloys. J. Metall. 2011, 2011, 501483. [Google Scholar] [CrossRef]
- Mohd, J.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Furuya, Y.; Shimada, H. Shape memory actuators for robotic applications. Mater. Des. 1991, 12, 21–28. [Google Scholar] [CrossRef]
- Lange, G.; Lachmann, A.; Hakim, A.; Rahim, A.; Hussain Ismail, M.; Yee Low, C. Shape memory alloys as linear drives in robot hand actuation. Proc. Comp. Sci. 2015, 76, 168–173. [Google Scholar] [CrossRef] [Green Version]
- Mohd, J.; Leary, M.; Subic, A. Shape memory alloys in automotive applications. Appl. Mech. Mater. 2014, 663, 248–253. [Google Scholar]
- Stoeckel, D. Shape memory actuators for automotive applications. Mater. Des. 1990, 11, 302–307. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C. Aerospace applications of shape memory alloys. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2007, 221, 535–552. [Google Scholar] [CrossRef] [Green Version]
- Bil, C.; Massey, K.; Abdullah, E.J. Wing morphing controlwith shape memory alloy actuators. J. Int. Mater. Sys. Struct. 2013, 24, 879–898. [Google Scholar] [CrossRef]
- Ferede, E.; Karakalas, A.; Gandhi, F.; Lagoudas, D.C. Numerical investigation of autonomous camber morphing of a helicopter rotor blade using shape memory alloys. In Proceedings of the 77th Annual Vertical Flight Society Forum and Technology Display 2021, Online, 10–14 May 2021. [Google Scholar]
- Torra, V.; Martorell, F.; Lovey, F.C.; Sade, M.L. Civil Engineering Applications: Specific Properties of NiTi Thick Wires and Their Damping Capabilities, a Review. Shape Mem. Superelasticity 2017, 3, 403–413. [Google Scholar] [CrossRef]
- Sgambitterra, E.; Maletta, C.; Furgiuele, F. Modeling and simulation of the thermo-mechanical response of NiTi-based Belleville springs. J. Int. Mater. Sys. Struct. 2016, 27, 81–91. [Google Scholar] [CrossRef]
- Ionatjis, R.R.; Kotov, V.V.; Shchukin, I.M. Application of shape memory alloys in the nuclear power. Atomnaya Energiya 1995, 79, 712–714. [Google Scholar]
- Niccoli, F.; Garion, C.; Maletta, C.; Cangialosi, C.; Infantino, A.; Danzeca, S.; Chiggiato, P. Particle radiation effects on shape memory alloy couplers for ultra-high vacuum sealing: A preliminary study. Smart Mater. Struct. 2019, 28, 085023. [Google Scholar] [CrossRef]
- Niccoli, F.; Garion, C.; Maletta, C.; Sgambitterra, E.; Furgiuele, F.; Chiggiato, P. Beam-pipe coupling in particle accelerators by shape memory alloy rings. Mater. Des. 2017, 114, 603–611. [Google Scholar] [CrossRef]
- Niccoli, F.; Garion, C.; Maletta, C.; Chiggiato, P. Shape-memory alloy rings as tight couplers between ultrahigh-vacuum pipes: Design and experimental assessment. J. Vac. Sci. Technol. A 2017, 35, 031601. [Google Scholar] [CrossRef]
- Wei, Z.G.; Sandström, R.; Miyazaki, S. Shape-memory materials and hybrid composites for smart systems. Part I Shape-memory materials. J. Mater. Sci. 1998, 33, 3743–3762. [Google Scholar]
- Cohades, A.; Michaud, V. Shape memory alloys in fibre-reinforced polymer composites. Adv. Ind. Eng. Pol. Res. 2018, 1, 66–81. [Google Scholar] [CrossRef]
- Lester, B.; Baxevanis, T.; Chemisky, Y.; Lagoudas, D.C. Review and perspectives: Shape memory alloy composite systems. Acta Mech. 2015, 226, 3907–3960. [Google Scholar] [CrossRef] [Green Version]
- Balta, J.A.; Parlinska, M.; Michaud, V.; Gotthardt, R.; Manson, J.A.E. Adaptive Composites with Embedded Shape Memory Alloy Wires. MRS Online Proc. Libr. 1999, 604, 141–146. [Google Scholar] [CrossRef]
- Raghavan, J.; Bartkiewicz, T.; Boykoa, S.; Kupriyanov, M.; Rajapakse, N.; Yu, B. Damping, tensile, and impact properties of superelastic shape memory alloy (SMA) fiber-reinforced polymer composites. Comp. Part B Eng. 2010, 41, 214–222. [Google Scholar] [CrossRef]
- Saeedi, A.; Shokrieh, M.M. A novel self-healing composite made of thermally reversible polymer and shape memory alloy reinforcement. J. Int. Mater. Sys. Struct. 2019, 30, 1585–1593. [Google Scholar] [CrossRef]
- Winzek, B.; Sterzl, T.; Rumpf, H.; Quandt, E. Composites of different shape memory alloys and polymers for complex actuator motions. J. Phys. IV 2003, 112, 1163–1168. [Google Scholar] [CrossRef]
- Chaudhry, Z.; Rogers, C. Response of composite beams to an internal actuator force. J. Mech. Des. 1992, 114, 343–348. [Google Scholar] [CrossRef]
- Murasawa, G.; Tohgo, K.; Ishii, H. Deformation behavior of niti/polymer shape memory alloy composites—Experimental verifications. J. Comp. Mater. 2004, 38, 399–416. [Google Scholar] [CrossRef]
- Payandeh, Y.; Meraghni, F.; Patoor, E.; Eberhardt, A. Study of the martensitic transformation in niti–epoxy smart composite and its effect on the overall behavior. Mater. Des. 2012, 39, 104–110. [Google Scholar] [CrossRef]
- Barrie, F.; Futch, D.B.; Hsu, D.H.D.; Manuel, M.V. Effect of phase on debond strength in shape memory alloy reinforced composites. Mater. Des. 2014, 57, 98–102. [Google Scholar] [CrossRef]
- Poon, C.K.; Lau, K.T.; Zhou, L.M. Design of pull-out stresses for prestrained sma wire/polymer hybrid composites. Comp. Part B Eng. 2005, 36, 25–31. [Google Scholar] [CrossRef]
- Payandeh, Y.; Meraghni, F.; Patoor, E.; Eberhardt, A. Debonding initiation in a niti shape memory wire–epoxy matrix composite influence of martensitic transformation. Mater. Des. 2010, 31, 1077–1084. [Google Scholar] [CrossRef]
- Jang, B.K.; Kishi, T. Adhesive strength between tini fibers embeddedin CFRP composites. Mater. Lett. 2005, 59, 1338–1341. [Google Scholar] [CrossRef]
- Hebda, D.A.; Whitlock, M.E.; Ditman, J.B.; White, S.R. Manufacturing of adaptive graphite/epoxy structures with embedded Nitinol wires. J. Int. Mater. Sys. Struct. 1995, 6, 220–228. [Google Scholar] [CrossRef]
- Tsoi, K.A.; Stalmans, R.; Schrooten, J. Transformational behaviour of constrained shape memory alloys. Acta Mater. 2022, 50, 3535–3544. [Google Scholar] [CrossRef]
- Tahiri, V.L.; Patoor, E.; Eberhardt, A. An analysis of the thermomechanical behaviour of a shape memory alloy/elastomer composite. J. Phys. IV 2004, 115, 195–203. [Google Scholar] [CrossRef]
- Barrett, R.; Gross, R.S. Super-active shape-memory alloy composites. Smart Mater. Struct. 1999, 5, 255–260. [Google Scholar] [CrossRef]
- Lee, J.H.; Chung, Y.; Rodrigue, H. Long shape memory alloy tendon-based soft robotic actuators and implementation as a soft gripper. Sci. Rep. 2019, 9, 11251. [Google Scholar] [CrossRef] [PubMed]
- Di Cocco, V.; Iacoviello, F.; Maletta, C.; Natali, S. Cyclic microstructural transitions and fracture micromechanisms in a near equiatomic NiTi alloy. Int. J. Fatigue 2014, 58, 136–143. [Google Scholar] [CrossRef]
- Maletta, C.; Niccoli, F.; Sgambitterra, E.; Furgiuele, F. Analysis of fatigue damage in shape memory alloys by nanoindentation. Mater. Sci. Eng. A 2017, 684, 335–343. [Google Scholar]
- Sgambitterra, E.; Magarò, P.; Niccoli, F.; Renzo, D.; Maletta, C. Novel insight into the strain-life fatigue properties of pseudoelastic NiTi shape memory alloys. Smart Mater. Struct. 2019, 28, 10LT03. [Google Scholar] [CrossRef]
- Sgambitterra, E.; Maletta, C.; Furgiuele, F.; Sehitoglu, H. Fatigue crack propagation in [0 1 2] NiTi single crystal alloy. Int. J. Fatigue 2018, 112, 9–20. [Google Scholar] [CrossRef]
- Maletta, C.; Young, M.L. Stress-induced martensite in front of crack tips in niti shape memory alloys: Modeling versus experiments. J. Mater. Eng. Perform. 2011, 20, 597–604. [Google Scholar] [CrossRef]
- Sgambitterra, E.; Maletta, C.; Furgiuele, F. Investigation on Crack Tip Transformation in NiTi Alloys: Effect of the Temperature. Shape Mem. Superelasticity 2015, 1, 275–283. [Google Scholar] [CrossRef] [Green Version]
- Lagoudas, D.C. Shape Memory Alloys: Modeling and Engineering Applications; Springer Ebook Collection/Chemistry and Materials Science 1–3; Springer: New York, NY, USA, 2008. [Google Scholar]
- Hatcher, N.; Kontsevoi, O.Y.; Freeman, A.J. Role of elastic and shear stabilities in the martensitic transformation path of NiTi. Phys. Rev. B 2009, 80, 144203. [Google Scholar] [CrossRef]
- Qiu, S.; Clausen, B.; Padula, S.A., II; Noebe, R.D.; Vaidyanathan, R. On elastic moduli and elastic anisotropy in polycrystalline martensitic NiTi. Acta Mater. 2011, 59, 5055–5066. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Trade Name | Manufacturer |
|---|---|---|
| Shape memory alloy | SmartFlex | Saes Memry, Bethel, CT, USA |
| Polymer matrix | Epoxy crystal ng | Cores s.r.l., Parma, Italy |
| Material Property | Value |
|---|---|
| Density, ρ | 1.12 kg/dm3 |
| Heat Deflection Temperature, HDT | 64 °C |
| Glass transition temperature, TG | 120 °C |
| Curing temperature, TC | 25 °C |
| Curing time, tC | 48 h |
| Compression strength, Sc | 60 MPa |
| Bending strength, Sb | 18 MPa |
| Tensile strength, St | 12 MPa |
| Young’s modulus, E | 6.5 GPa at 25 °C 4.0 GPa at 120 °C |
| Poisson’s ratio, ν | 0.4 |
| FE Model Parameter | Value | |
|---|---|---|
| Description | Symbol | |
| Transformation temperatures | Mf | 13 °C |
| Ms | 50 °C | |
| As | 54 °C | |
| Af | 81 °C | |
| Clausius–Clapeyron constants | CA | 13.9 MPa °C−1 |
| CM | 12.2 MPa °C−1 | |
| Maximum recoverable strain | 0.061 | |
| Young’s moduli | EA | 44 GPa |
| EM | 21 GPa | |
| ER (@25 °C) | 6.5 GPa | |
| ER (@120 °C) | 4 GPa | |
| Poisson’s ratios | νA | 0.3 |
| νA | 0.3 | |
| νR | 0.4 | |
| Density | δA = δΜ | 6450 Kg m−3 |
| δR | 1120 Kg m−3 | |
| Heat capacity constant pressure | CpA | 600 J kg−1 K−1 |
| CpM | 500 J kg−1 K−1 | |
| CpR | 1100 J kg−1 K−1 | |
| Thermal expansion coefficient | αA | 11 × 10−6 K−1 |
| αM | 7 × 10−6 K−1 | |
| αR | 26 × 10−6 K−1 | |
| Electrical resistivity | ρA | 86 × 10−8 Ω m |
| ρΜ | 80 × 10−8 Ω m | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodinò, S.; Curcio, E.M.; Renzo, D.A.; Sgambitterra, E.; Magarò, P.; Furgiuele, F.; Brandizzi, M.; Maletta, C. Shape Memory Alloy—Polymer Composites: Static and Fatigue Pullout Strength under Thermo-Mechanical Loading. Materials 2022, 15, 3216. https://doi.org/10.3390/ma15093216
Rodinò S, Curcio EM, Renzo DA, Sgambitterra E, Magarò P, Furgiuele F, Brandizzi M, Maletta C. Shape Memory Alloy—Polymer Composites: Static and Fatigue Pullout Strength under Thermo-Mechanical Loading. Materials. 2022; 15(9):3216. https://doi.org/10.3390/ma15093216
Chicago/Turabian StyleRodinò, Stefano, Elio M. Curcio, Danilo A. Renzo, Emanuele Sgambitterra, Pietro Magarò, Franco Furgiuele, Marco Brandizzi, and Carmine Maletta. 2022. "Shape Memory Alloy—Polymer Composites: Static and Fatigue Pullout Strength under Thermo-Mechanical Loading" Materials 15, no. 9: 3216. https://doi.org/10.3390/ma15093216