In order to demonstrate the operation and performance of the proposed UFC, a case study was undertaken, and the system was modelled and simulated in the MATLAB Simulink® environment. The following subsections will be devoted to defining the UFC power profile, showing the grid-side converter and BESS parameters used, and drawing conclusions regarding the optimal DAFB rating. The last subsection will discuss the obtained numerical results.
3.1. Charging Station Power Profile and BESS Sizing
Several studies have been conducted to determine possible EV load forecasting techniques [
28,
29] to optimize the charging station operation. In this context, adequately planning the EV charging station behavior through multi-objective optimization algorithms can be beneficial [
30,
31]. These algorithms are typically defined according to the load demand, grid requirements, and economic indicators. However, this study intends to validate the converter operation and the BESS sizing, highlighting scenarios in which different power levels should be satisfied. For this reason, a simple power profile was considered, but the same analysis can be addressed and extended if forecasting and optimization methods are adopted.
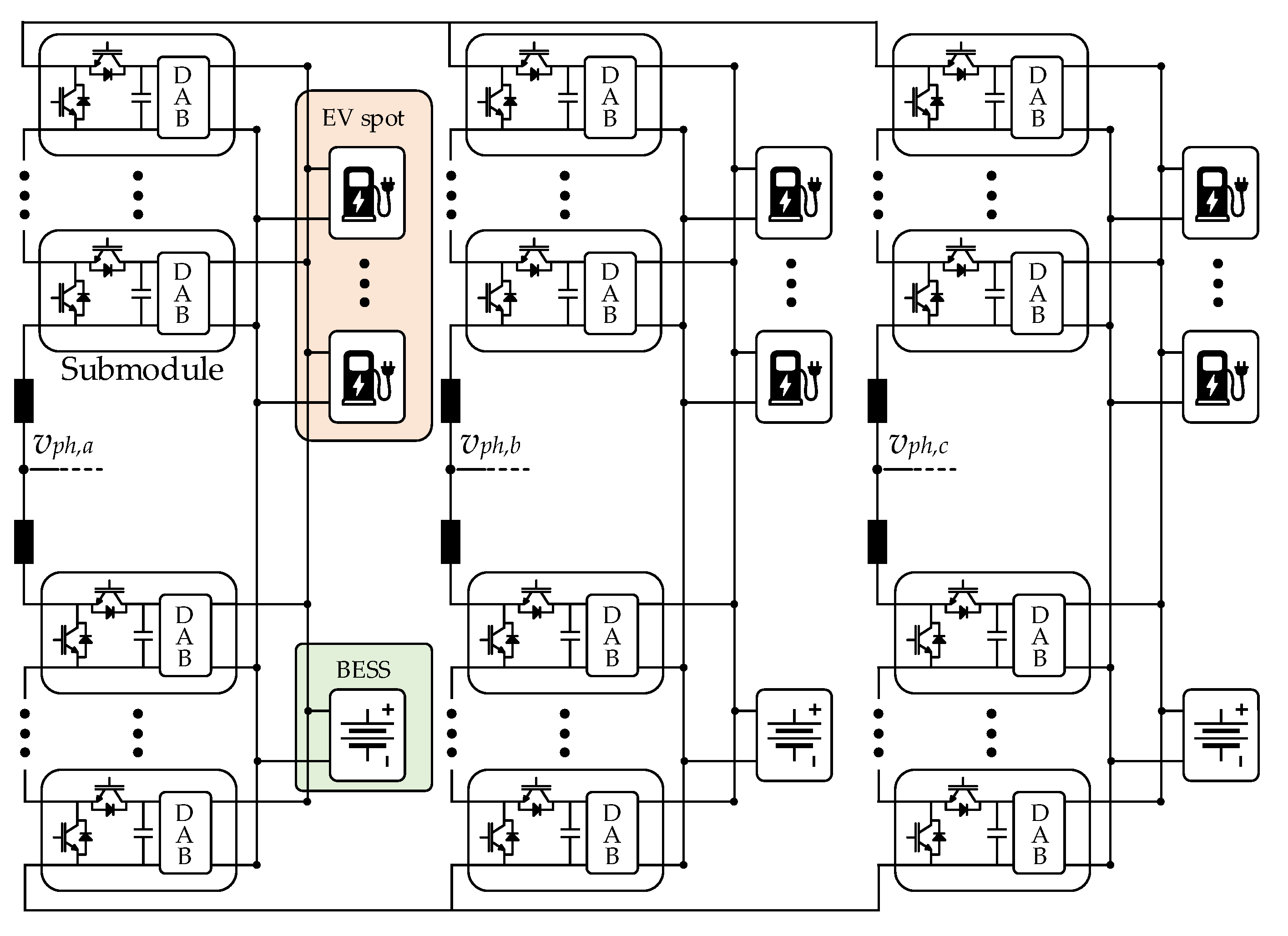
The considered charging station is equipped with 12 charging spots, 4 of each of the available dc buses. It is worth noting that the management of the communication protocols of the charging spots is out of the scope of this paper. This work focuses on defining an effective power electronic interface capable of satisfying the different load demands required by the connected electric vehicles. The public charging points can be supplied in direct or alternating current; however, a standard classification based on the available charging power is still not present. As an example, the Alternative Fuels Infrastructure Directive of the European Union only differentiates between normal (<22 kW) and fast (>22 kW) charging points, leaving the Member States the possibility of defining the criteria for distinguishing the power rating of the charging points [
32]. In this regard, taking, as a reference, the Italian case, four topologies are distinguished: slow (up to 7.4 kW), quick (up to 22 kW), fast (up to 50 kW), and ultra-fast (>50 kW) [
33].
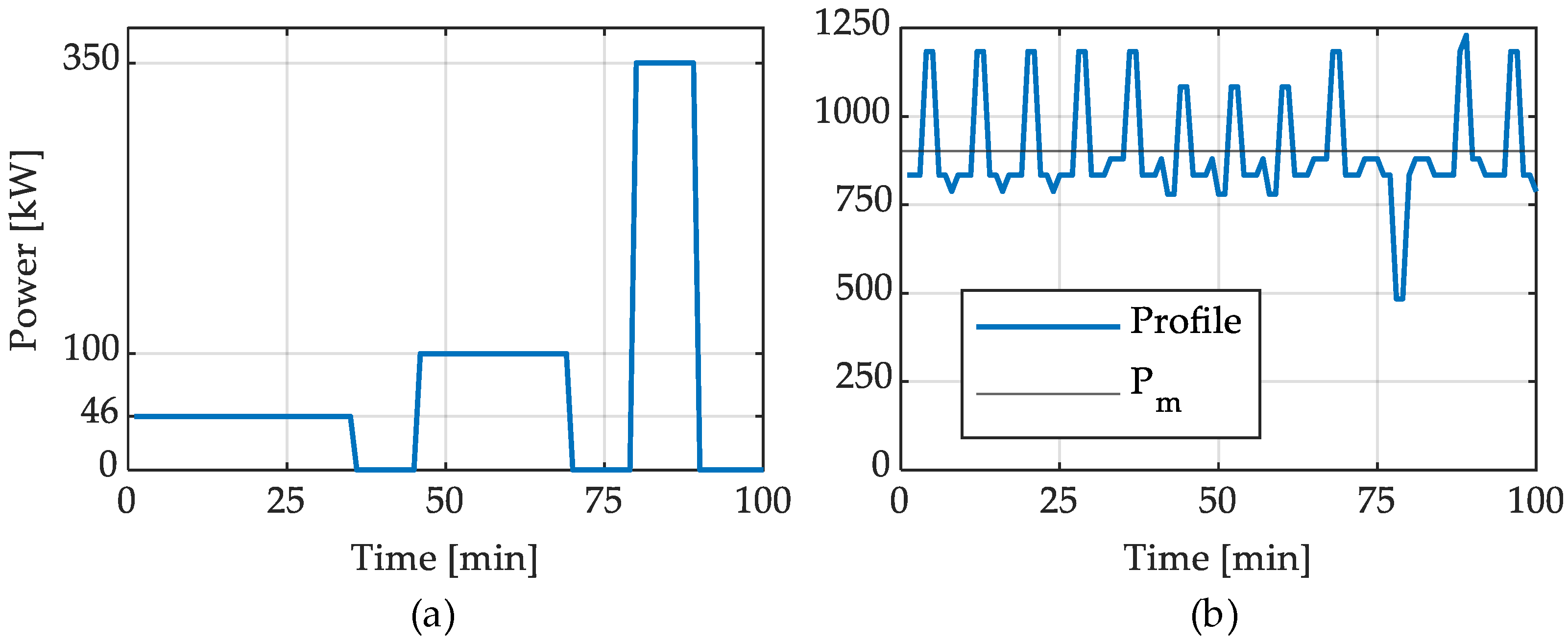
In this work, the charging spots are connected to the dc ports, and the achievable charging powers are defined as follows: the maximum charging power level of the station, i.e., ultra-fast, was set to 350 kW, while two further fast charging levels of 46 kW and 100 kW were used to create a heterogeneous power demand. Finally, the rated dc bus voltage is set to 400 V. The vehicles to be charged were selected according to the charging level mentioned above. Their main data are reported in
Table 1, where charging times are calculated to charge the vehicle battery from 20% to 90% of the SOC. The single spot power profile, taken from [
12], lasts
Ttot = 100 min and is shown in
Figure 7a. It is supposed that all 12 charging spots are working at the same time, and the power profiles of the spots are uniformly delayed one from the other, i.e., the profiles are obtained with a time shift of
Ttot/12 [
12]. As a consequence, the charging station profile
ptot(t) is obtained by summing the power profiles of the spots and is shown in
Figure 7b. In the figure, the average power of the charging demand
Pm = 902.1 kW is also indicated.
The energy storage system can be sized starting from the defined profile and the power delivered by the grid
pg(
t). For the sake of the sizing procedure, it is possible to assume that the grid provides the average power of the profile, i.e.,
pg(
t) =
Pm. Thus, the storage energy profile
es(
t) can be retrieved as
The minimum BESS sizing energy
can be computed as
Nevertheless, it is always recommended to avoid full discharge of the battery. For this reason, a 30% capacity margin is considered.
In order to size the BESS, it is possible to also consider the system efficiency
ηsys, and the total BESS sizing energy
is obtained as
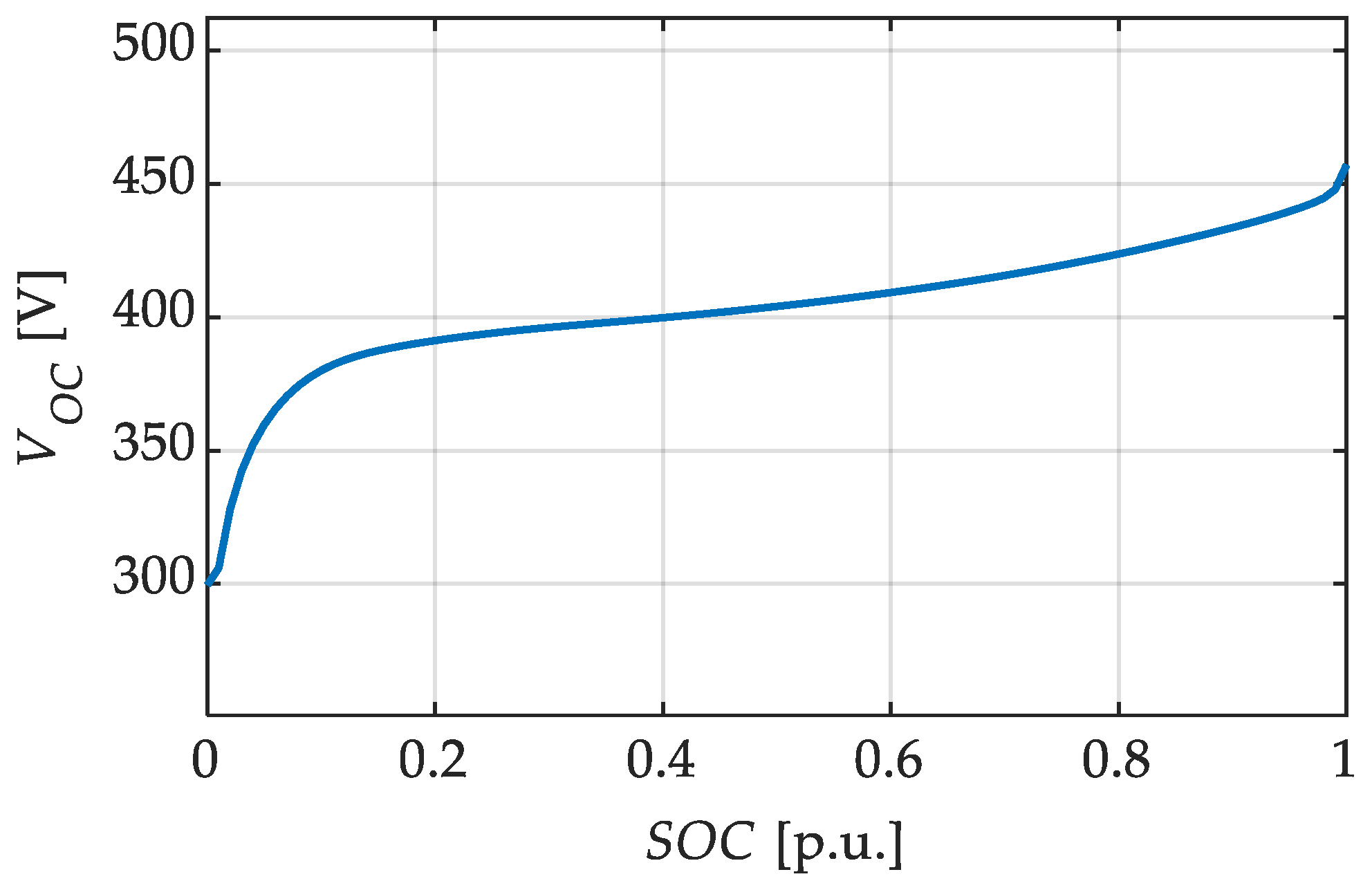
Since the storage system is split among three BESSs connected to MMC legs, each BESS is sized to have one-third of the total energy. The equivalent leg energy is indicated by
Ebatt. The parameters of the BESS and of the battery pack are shown in
Table 2, while the
SOC-
VOC characteristic considered is reported in
Figure 8. For the sake of simplicity, the installed BESSs were considered equal among the converter phases. However, the results can be easily extended in the case of integrating BESSs with different voltage levels, states of health, or technologies.
It should be pointed out that since the installed BESS is responsible for proving only peak shaving, it is expected that, if correctly sized, its SOC at the end of the total power charging profile will reach the initial value. Furthermore, depending on the demanded dc bus power, differences among the three BESS SOCs may arise during the converter operation. In this case, the circulating current control will tend to equalize their SOCs, avoiding compromising the overall system. However, this is limited by the maximum circulating injectable current. In addition, it is worth noting that the total installed BESS energy depends only on the charging station power profile and the grid power. Then, it is possible to subdivide the BESS into multiple subgroups according to the system requirements. However, since the installed energy does not vary, the BESS cost remains unchanged. Instead, the BESS disposition mainly affects the management of the integrated sources, the system reliability, and the required cooling systems. The proposed charging station architecture achieves a trade-off among the previously mentioned issues. Indeed, the BESS installation is performed at the MMC leg level, achieving a certain modularity without increasing the system complexity.
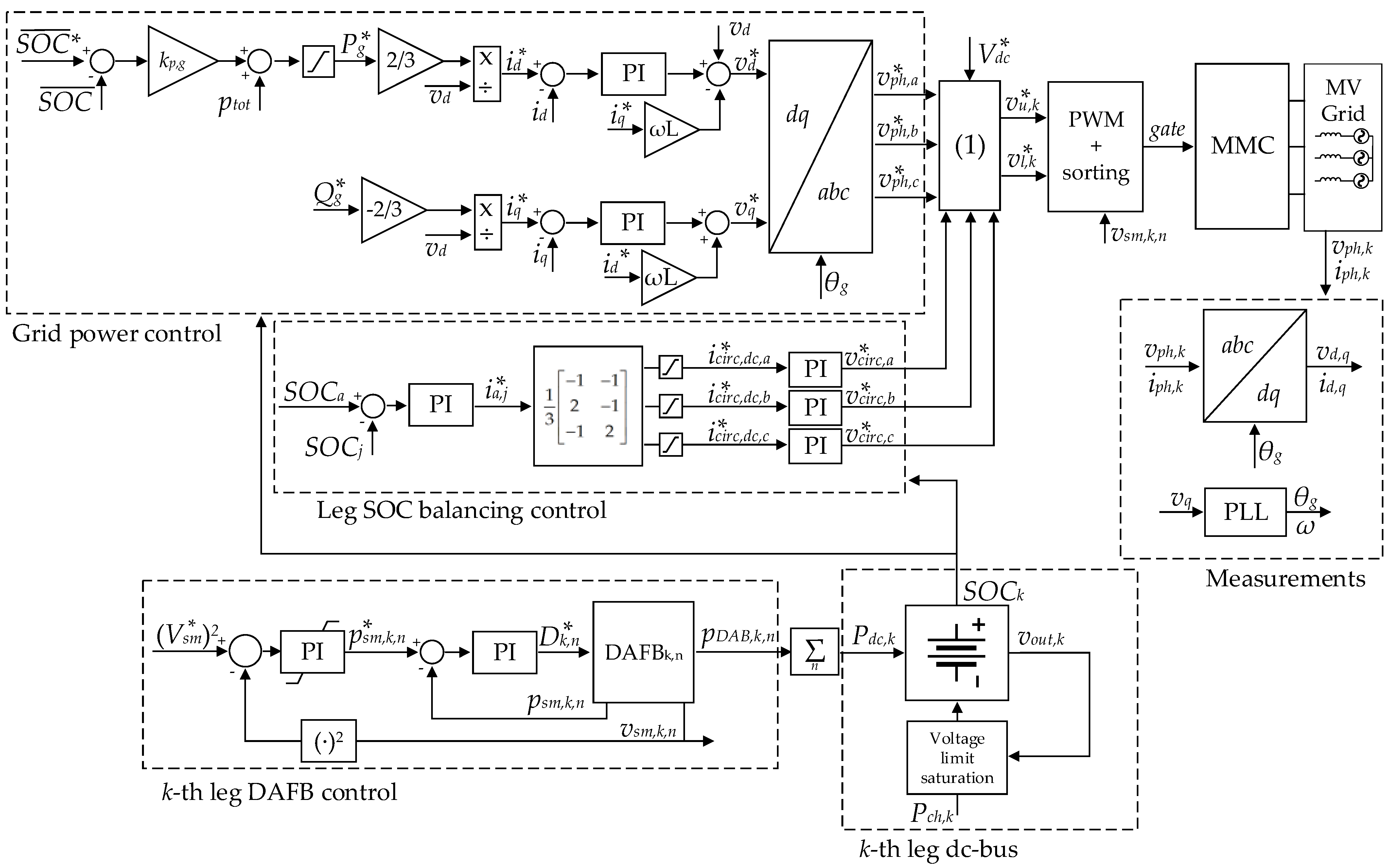
3.2. Grid-Side Converter and DAFB Parameter Selection
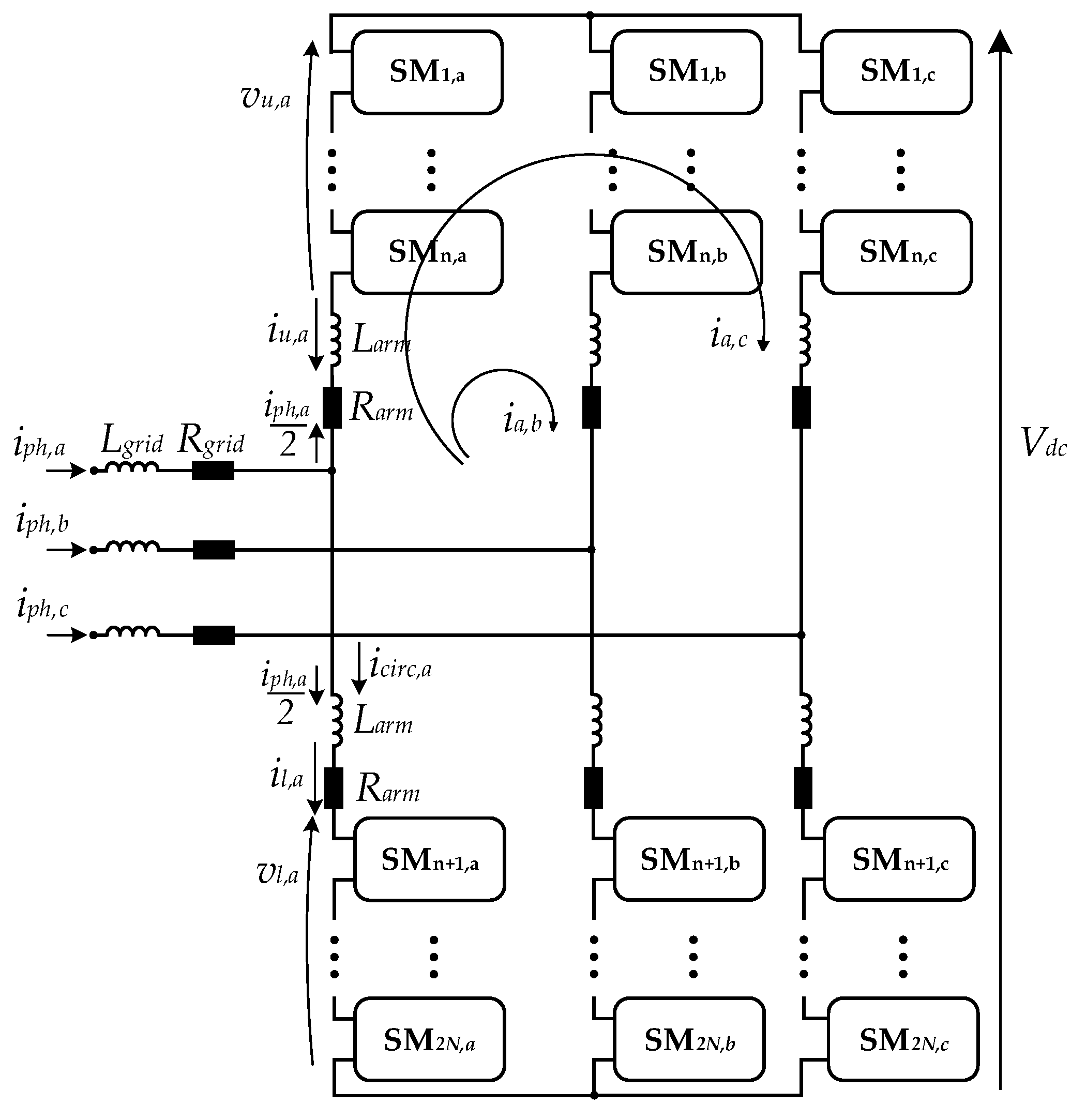
The main parameters of the considered MV grid and of the grid-side converter are reported in
Table 3 and
Table 4, respectively.
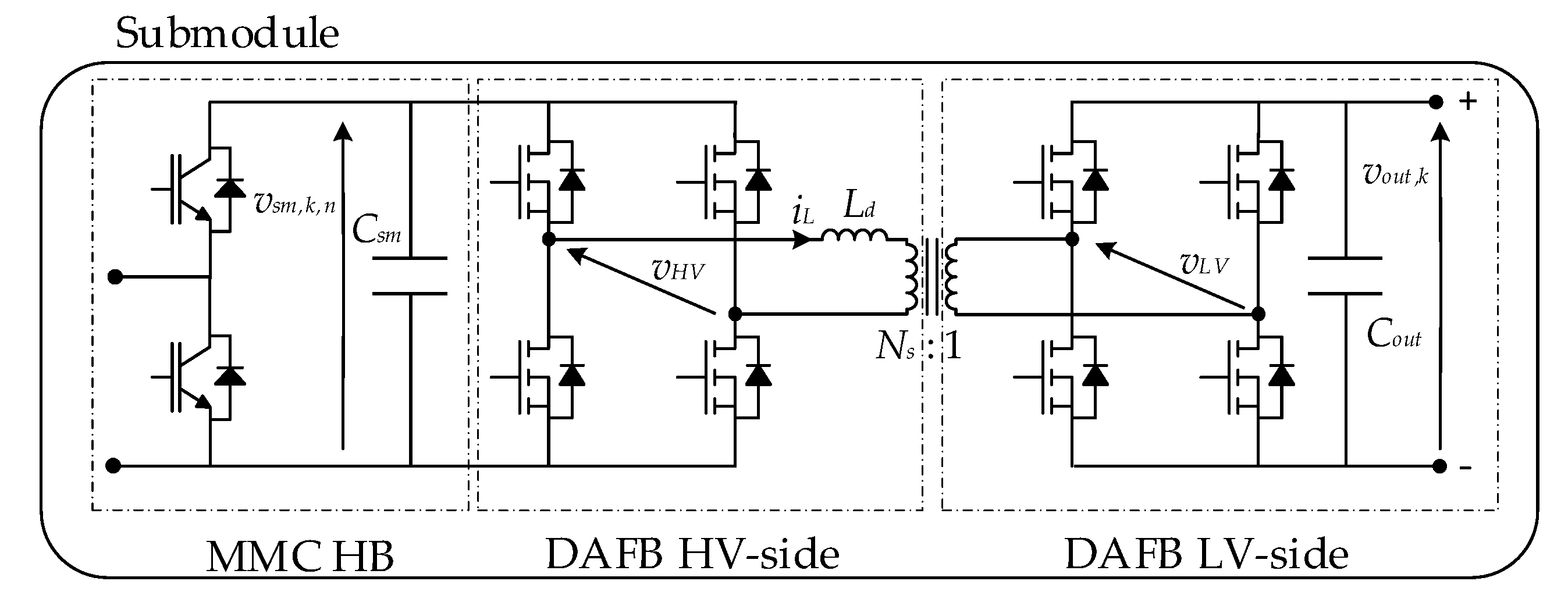
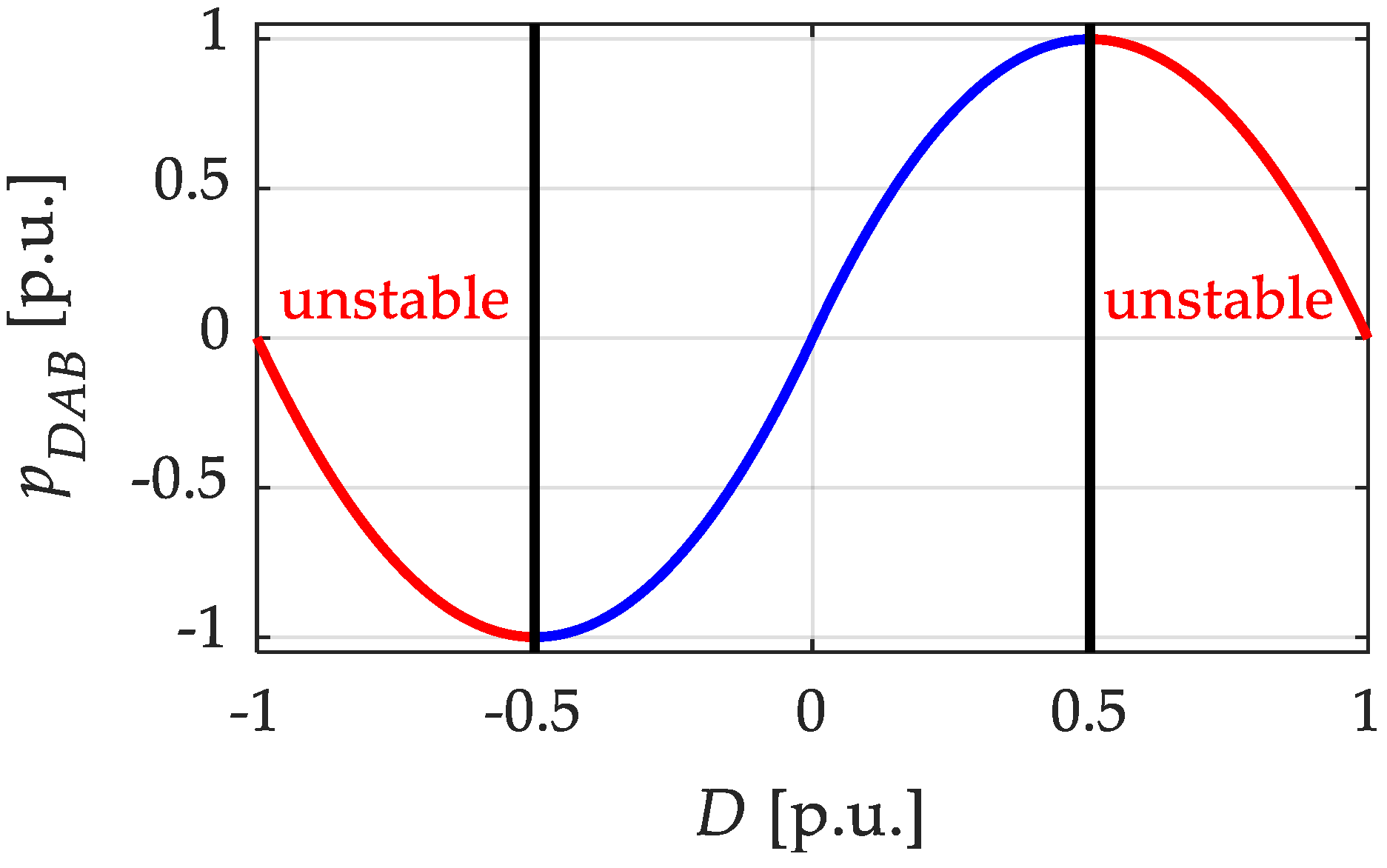
In order to ensure proper and efficient operations of the charging station, it is necessary to pay particular attention to the DAFB rating and parameter selection. Indeed, as anticipated in the previous section, ZVS operations of the converter are ensured only inside the boundaries identified in (10). To respect this relation, estimating the DAFB voltage levels and selecting the proper turns ratio
Ns are necessary. As explained in
Section 2,
vsm is controlled to be constant (i.e., equal to
Vsm), while the dc bus voltage
Vbus is dependent on the battery SOC and working conditions. For this reason, by considering the open circuit battery voltage at SOC equal to 0.5, the transformer turns ratio is defined as
In order to determine the converter-rated active power, it is necessary to consider both the grid and the balancing powers. In the considered case, the charging station can absorb a maximum power
from the grid. Hence, the maximum active power entering an SM that the single DAFB has to manage is
where
=
. From the obtained power values, it is possible to establish sizing parameters for the DAFB. For a fixed switching frequency
fs and after having established the turns ratio
Ns according to (17), it is necessary to select the converter leakage inductance, i.e.,
Ld, to ensure the capability of delivering the maximum requested power at the minimum dc bus voltage
. Thus, the DAFB leakage inductance, on the HV side, can be retrieved substituting in (8):
D = 0.5,
vout =
, and
PDAB =
. In this way, the maximum requested power is delivered in every condition. Finally, the DAFB parameters defined according to the previous procedure are reported in
Table 5.
3.3. Simulation Results
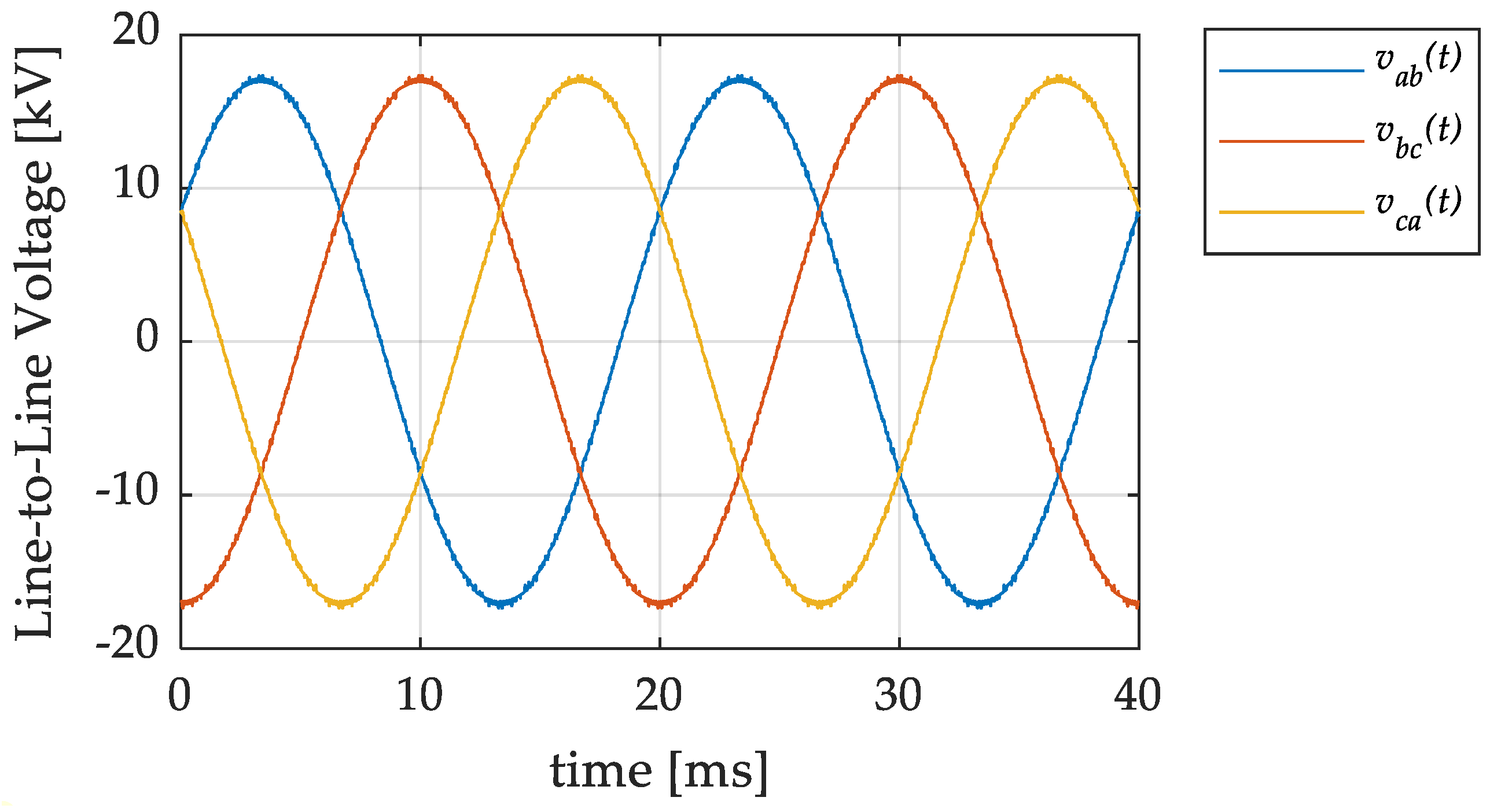
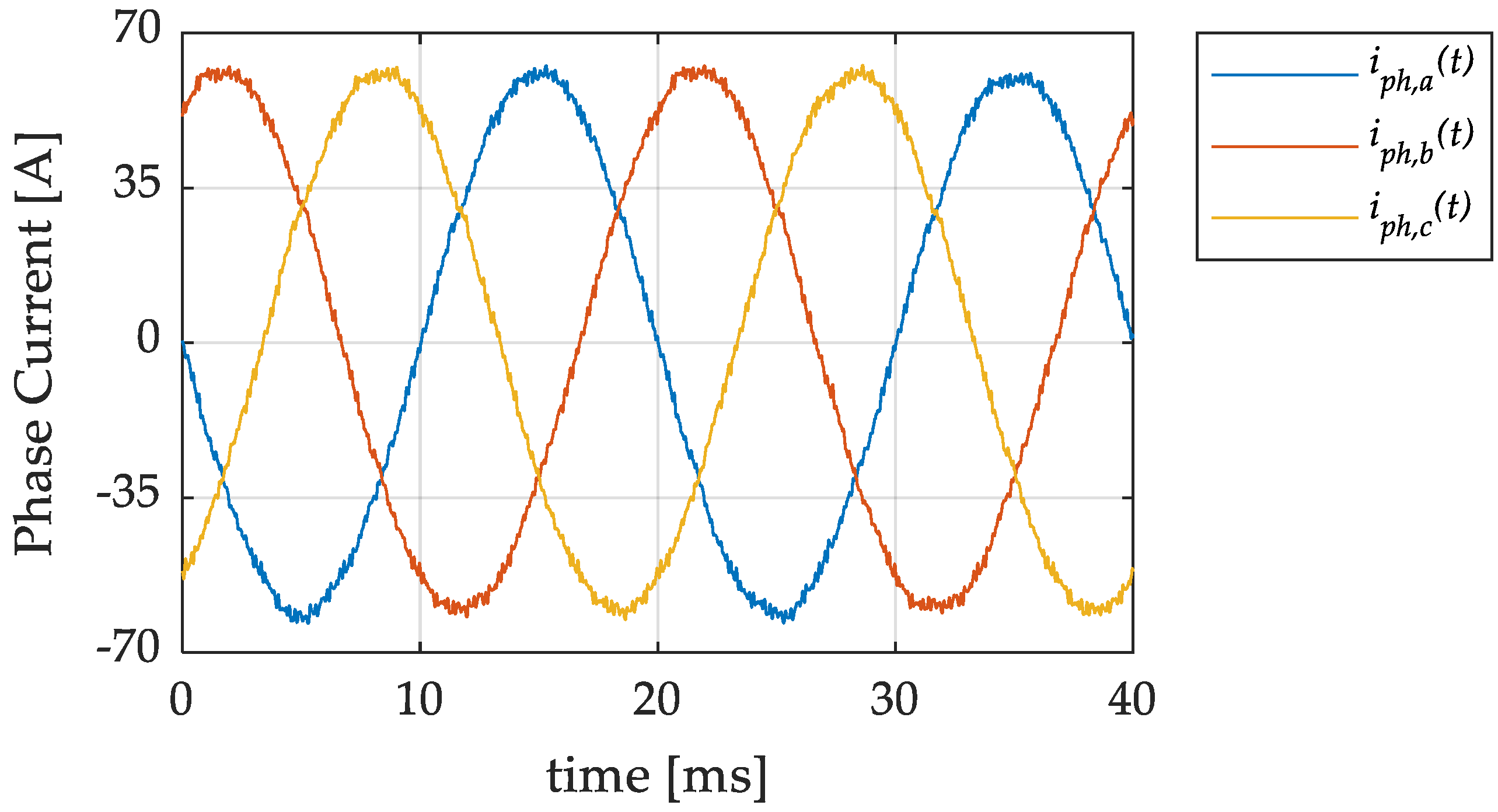
The first simulation aims to show the output voltage and current waveforms of the MMC. In this first case, the station absorbs the average power of the power profile previously defined, i.e.,
Pm = 902.1 kW.
Figure 9 shows the three line-to-line voltages, while
Figure 10 shows the phase currents. In order to evaluate the THD of the phase currents, it is possible to refer to the standard IEEE 519–2022, which suggests computing the THD up to the 50th harmonic [
34]. For this reason, the switching frequency harmonic component is not interesting in the computation. The THDs of the phase currents are reported in
Table 6. As is possible to see, the converter ensures low THD values without the need for additional filters when connected to the considered grid.
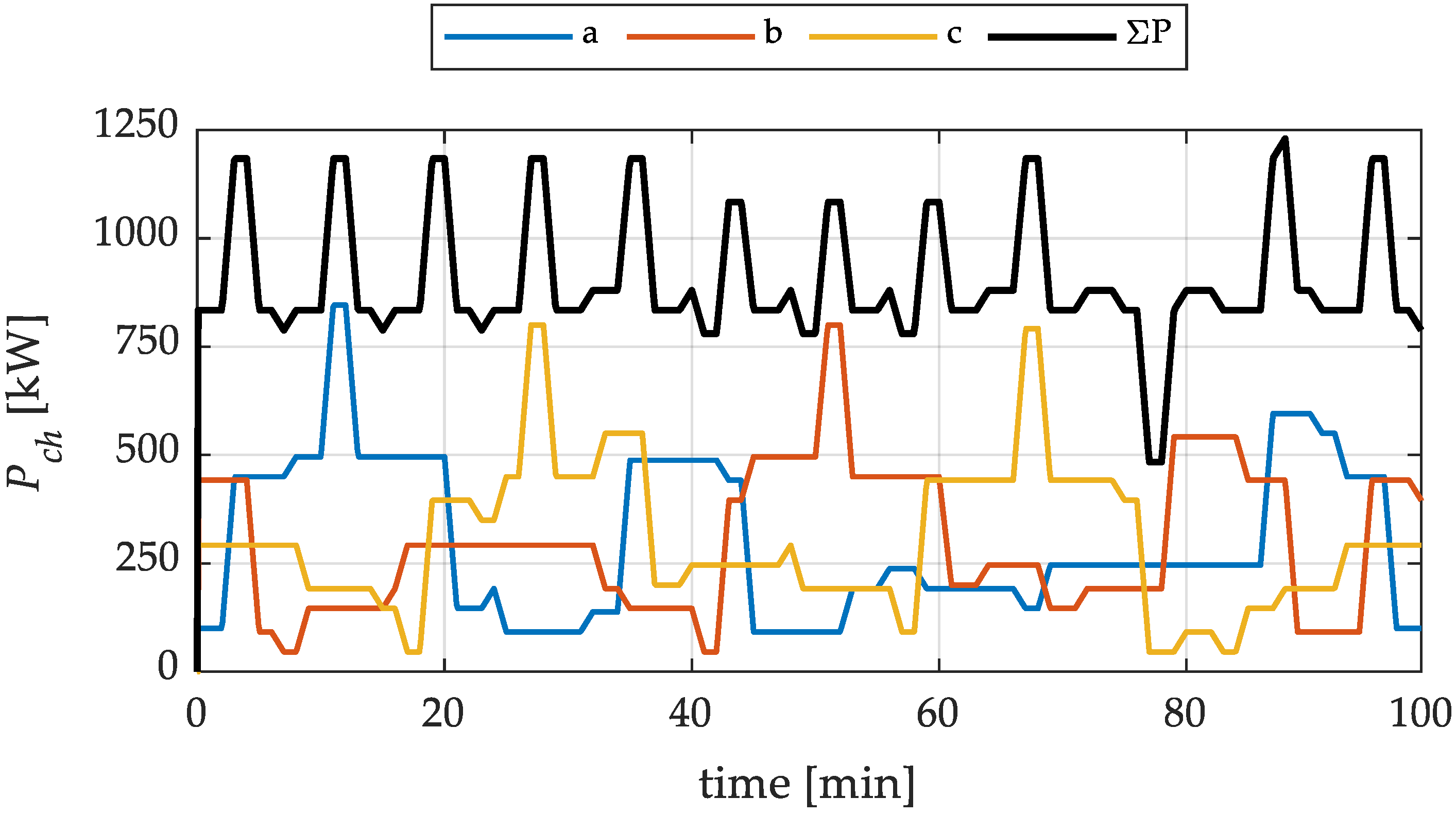
The second simulation was performed to assess the capability of the charging station to fulfil the power demand and to test its control. The initial SOCs of the three stationary batteries were assumed to be equal to 0.75. For each dc bus, four of the twelve profiles defined in
Section 3.1. were summed to obtain three different power profiles. These were assigned in order to create load imbalances among the converter legs, aimed at testing the converter capability to manage imbalances through the circulating current control. The three power demands
Pch,k required by the spots to the dc buses are reported in
Figure 11, along with their sum to better visualize the overall power profile. Here, it is possible to observe the imposed imbalances in the power demand among the three converter dc buses, as happens, for example, around
t = 10 min, where the dc bus of phase-
a experiences a peak power demand while the load on the other two dc buses is low.
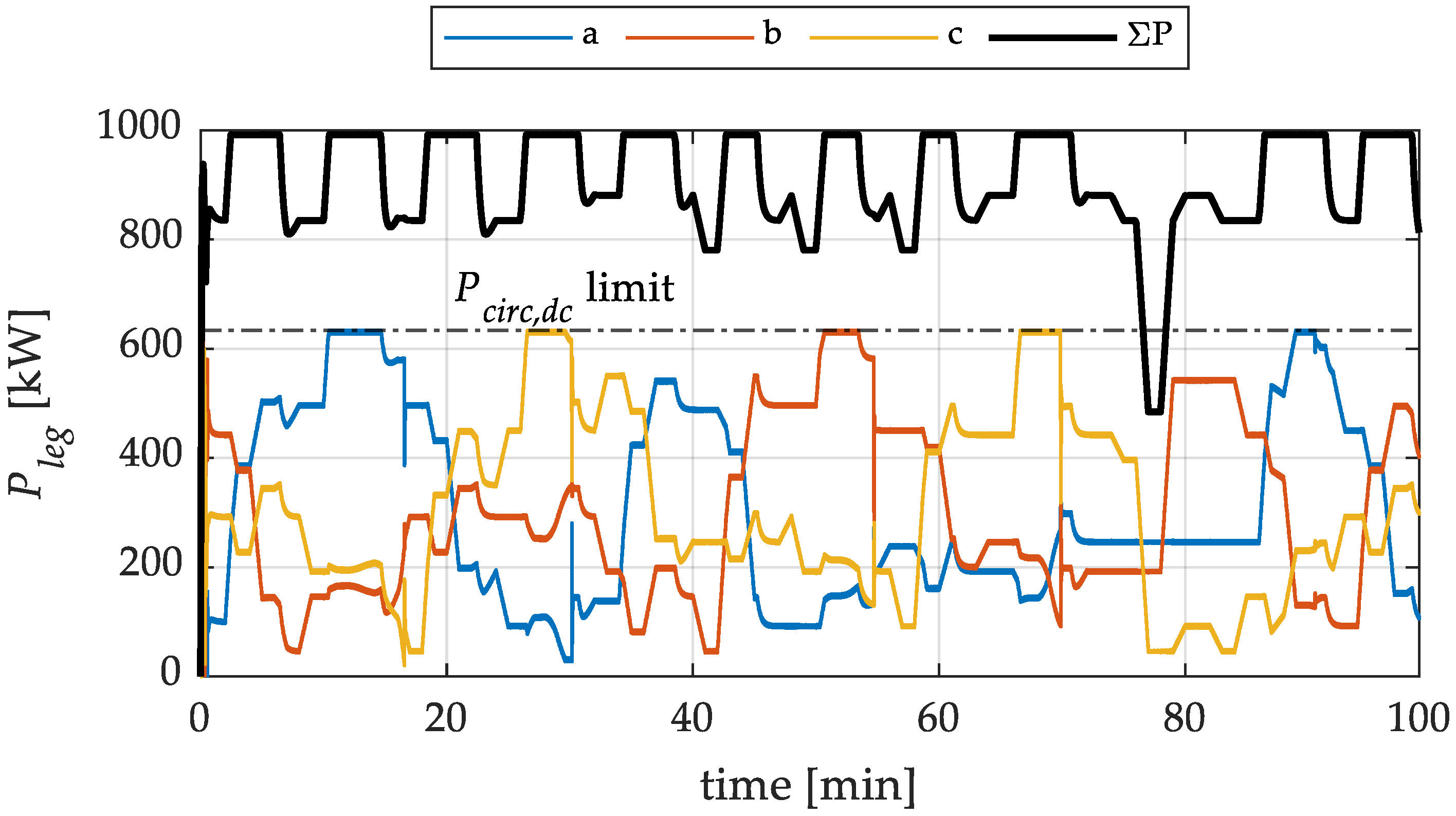
Figure 12 shows the power measured on each converter leg along with their sum, equal to the total power provided by the grid, while
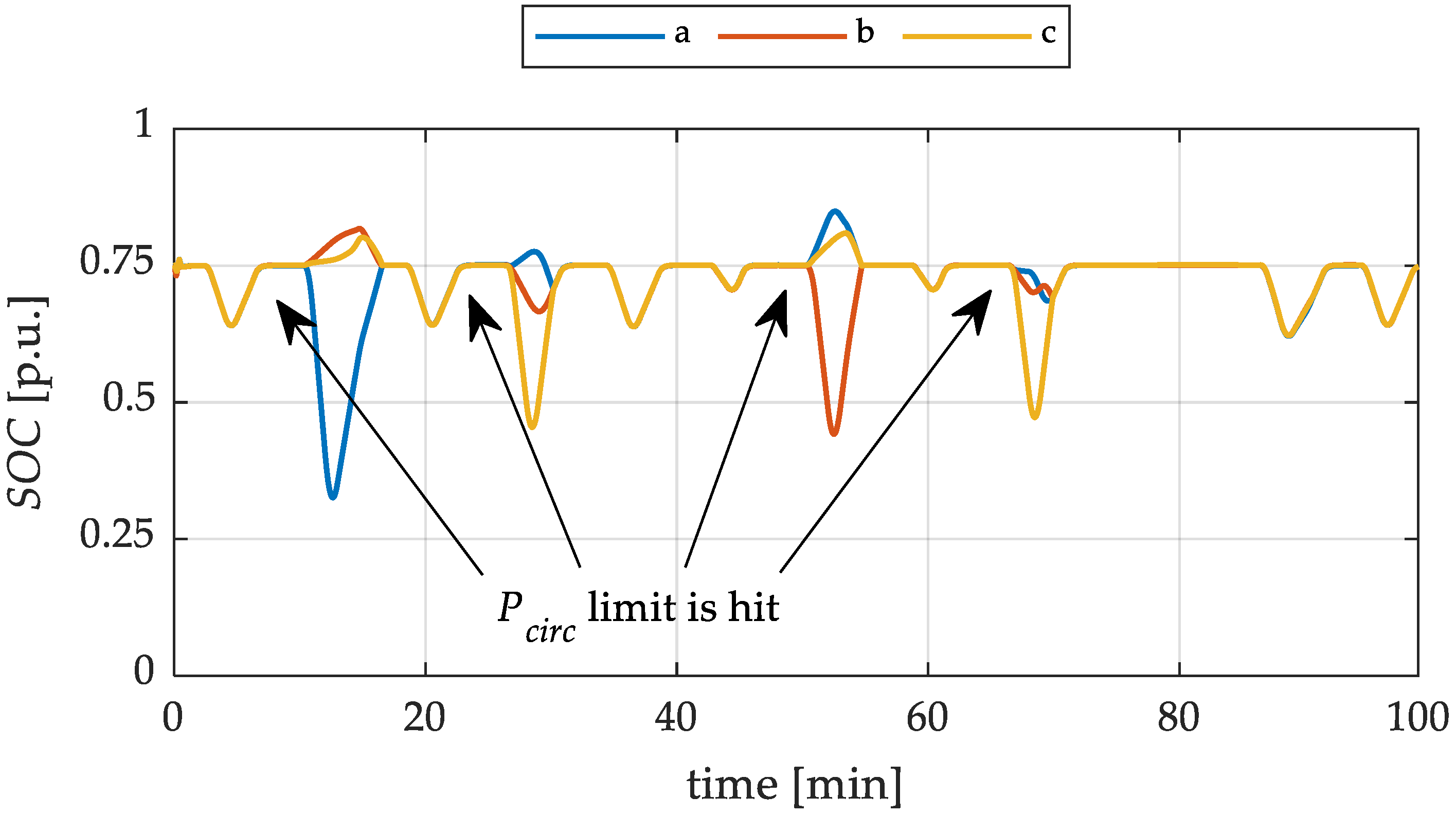
Figure 13 shows the SOC of each dc bus BESS. By comparing the previous three plots, it is possible to appreciate, from
Figure 12, that the circulating current control is able to effectively move power among the converter legs according to the SOCs of the three integrated batteries and the power demanded by vehicles connected to the three charging station dc buses. In particular, when the single dc bus power demand is below the maximum power transferrable by the circulating current (which is limited at
), the leg powers tend to follow the correspondent power demand in
Figure 11, and, thanks to the injection of the circulating currents, the three battery SOCs are equalized, as shown in
Figure 13. Moreover, in this scenario, since the overall charging station power demand is less than the maximum power that the grid can provide, the average converter SOC is kept at 0.75 by the grid power controller. Instead, in the event of a dc bus power demand exceeding the circulating power limit, the control saturation causes the three SOCs to be unequal for short periods, while the balancing is restored once the power peak is finished, as indicated in
Figure 13.
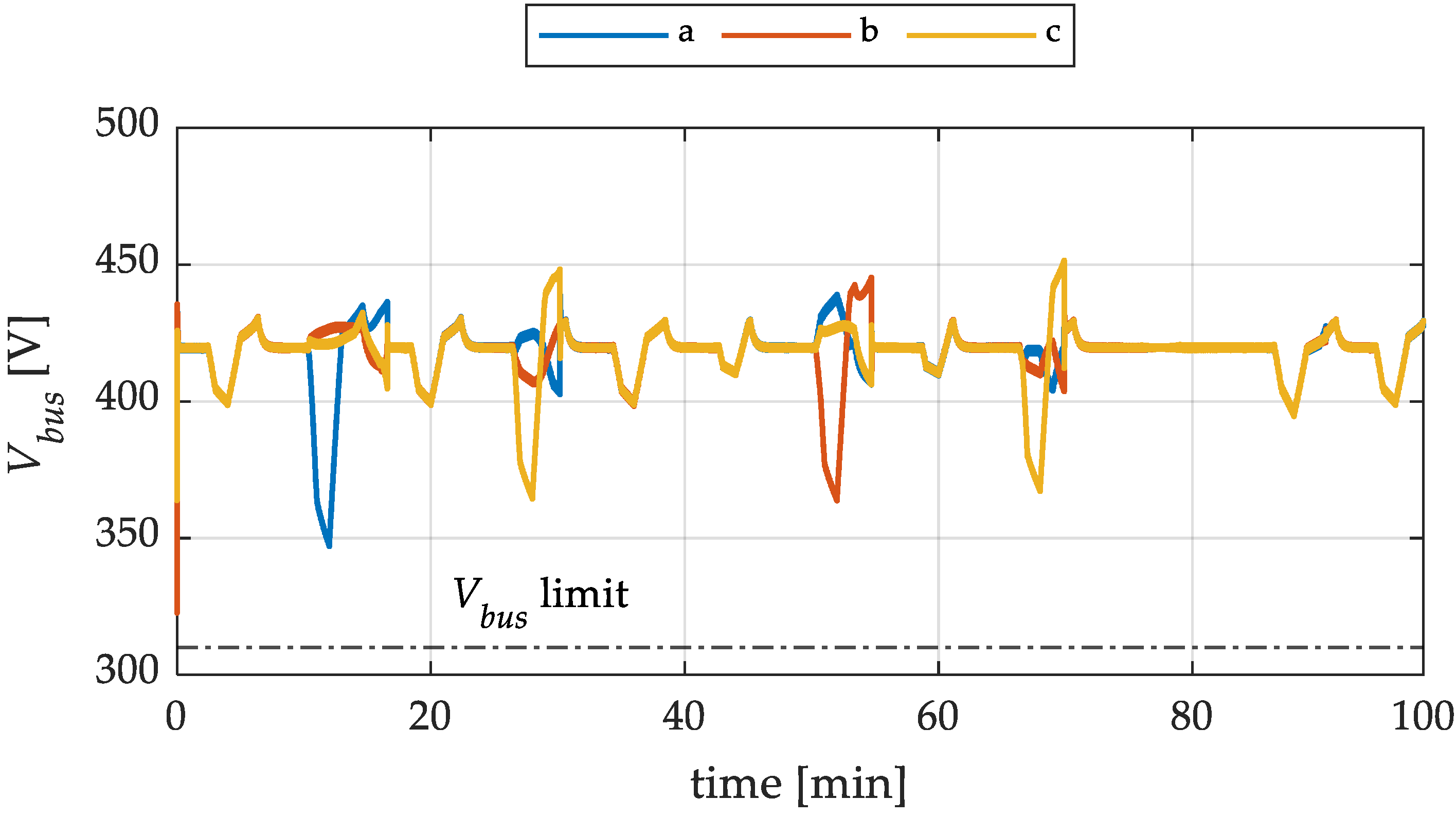
Figure 14 shows the three-leg dc bus voltages. Here, it is possible to notice that during the battery discharge, the voltage decreases due to the SOC decrease and the voltage drop in the battery internal resistance, while when the batteries are being charged, the relative voltage increases. Moreover, for each of the three dc buses, the voltage does not decrease under the minimum allowed value
, i.e., the power demand of the vehicles is not reduced by the control, as explained in
Section 2.4. Thus, the charging station is able to fulfill the power demand completely.
The front-side capacitor voltages of each SM in the upper arm of phase-
a are reported in
Figure 15. Here, it is shown that the average value is kept at the rated value of 1500 V from the DAFB voltage control, while the sorting algorithm guarantees the balancing of the
N arm capacitors. Moreover, it is possible to observe that small-voltage overshoots arise in correspondence with sudden changes in the leg power (i.e., in the leg current), while the oscillation around the average value
Vsm increases during higher-power intervals, as happens, for example, in the first 20 min, around 40 min, and at the end of the profile.
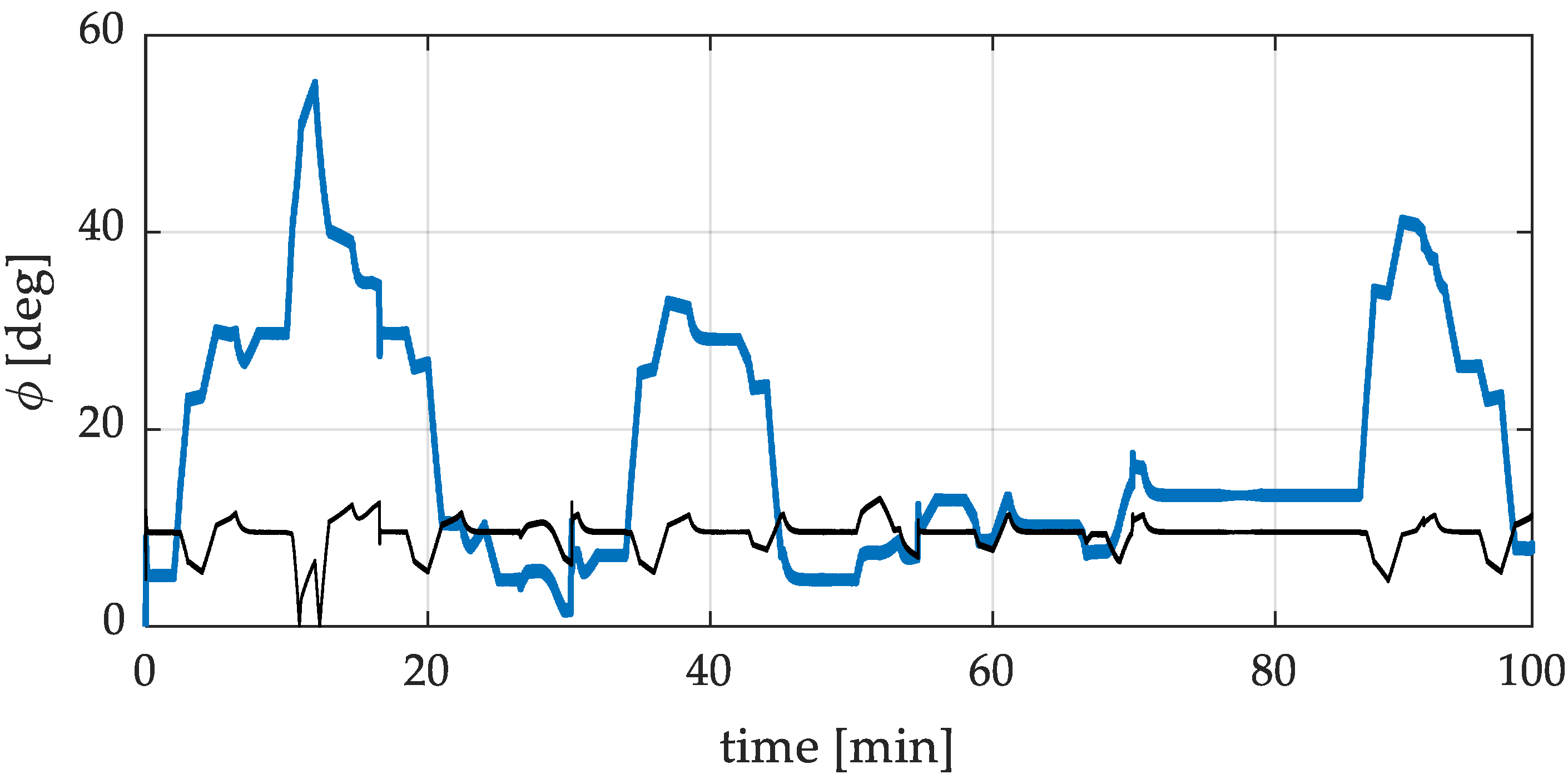
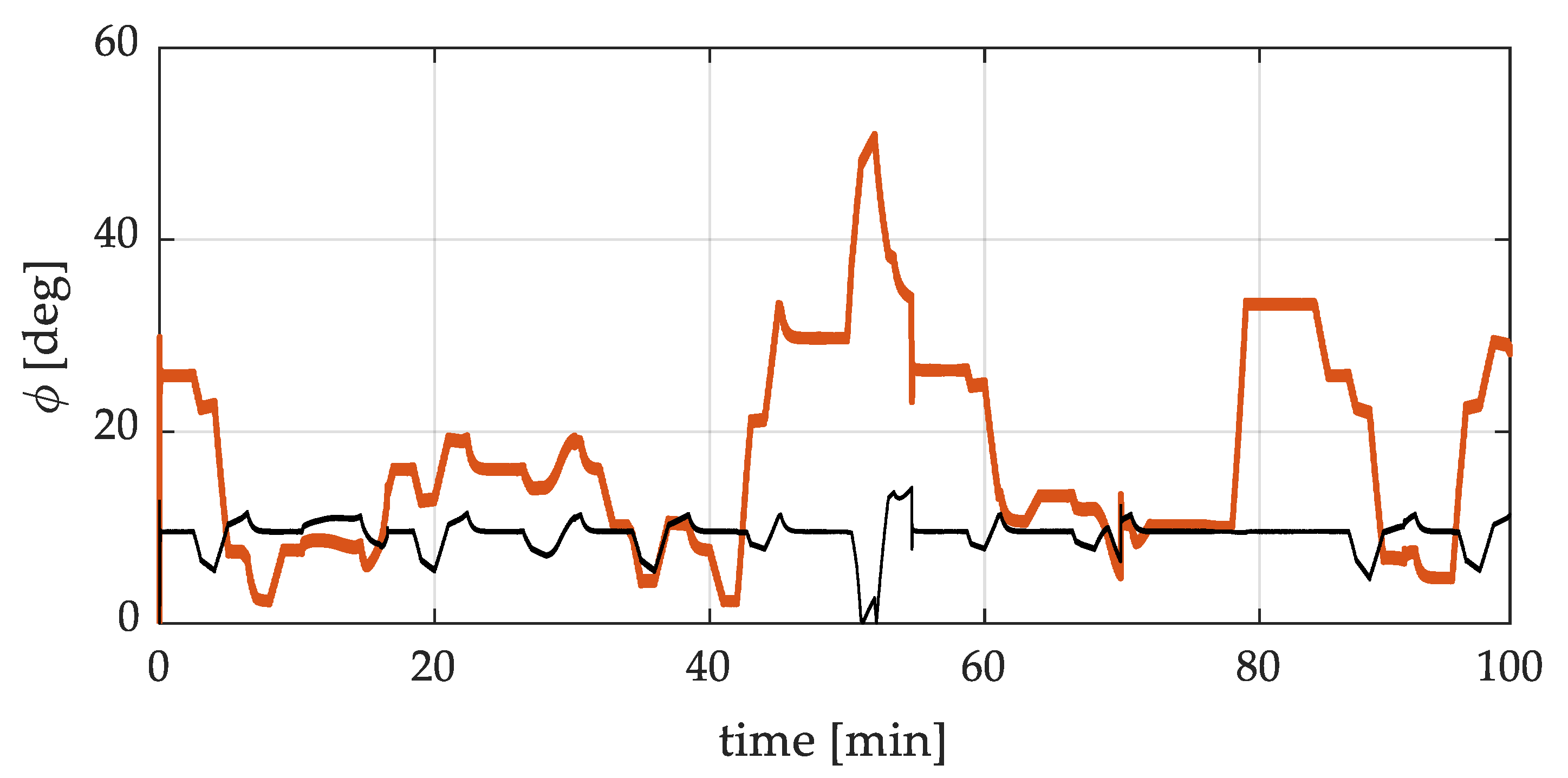
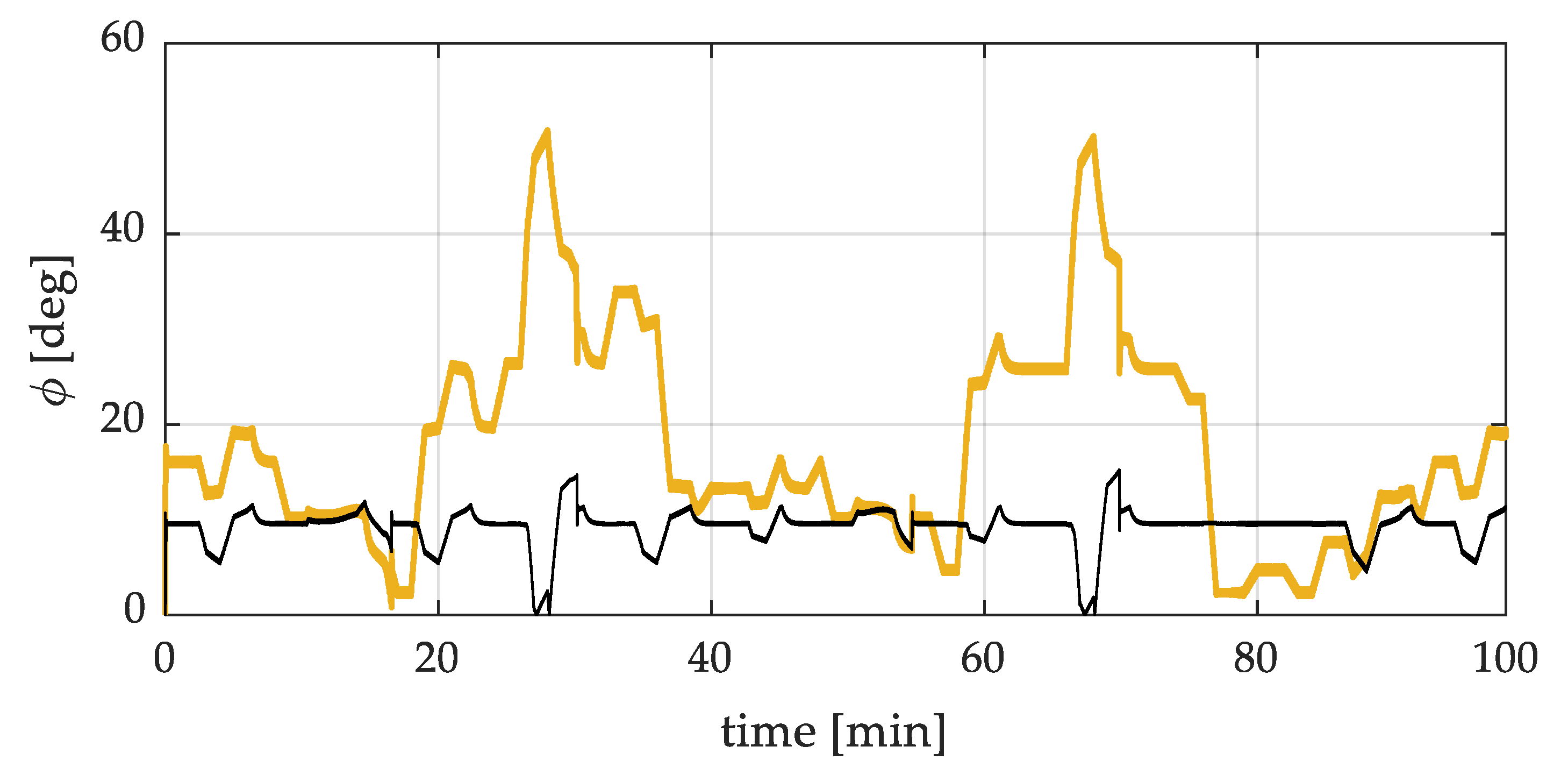
For what concerns the operation of the DAFB converters, the average DAFB control angles versus time are reported, for each phase, in
Figure 16,
Figure 17 and
Figure 18, where the ZVS lower boundary, computed using (10) and (11), is shown in black. In particular, it is possible to observe that DAFB converters operate above the ZVS limit angle during high-power peaks, while, as expected, ZVS is not achieved for low-power demand.
Finally, operations of the DAFB were analyzed in more detail around a change in the power reference. In particular, the analysis focuses on a DAFB in the upper arm of phase-
a and concerns the demand power change occurring at
t = 2 min, as reported in
Figure 11. The results in a time window of 0.8 s are reported in
Figure 19 and
Figure 20.
Figure 19 shows the control angle
ϕ of the converter, where it is possible to observe that, in correspondence with an increase in the required power, the average control angle raises as easily deducible from (8). In particular, the increase in the average value is due to the feed-forward term in the DAFB control, while the oscillations are related to the PI-regulator output.
Figure 20 shows the inductor current
iL in time. The behavior of the inductor current is strictly related to the phase shift of the converter: as it increases, the current peak increases. However, its increase is not continuous with the phase shift one due to the presence of a discrete time step in the simulation, which influences the minimum phase shift detectable by the converter. The angle resolution
ϕres can be computed as
where
Tstep = 50 nS is the simulation time step. By analyzing a time window of 60 μs, reported in
Figure 19 and
Figure 20, it is possible to confirm the described behavior. In particular, this is evident by analyzing the zoom reported in the figures. From
Figure 19, it is possible to appreciate that when
ϕ crosses 5.4°, i.e., 6
ϕres, the inductor current peak changes, while in correspondence with the next step in
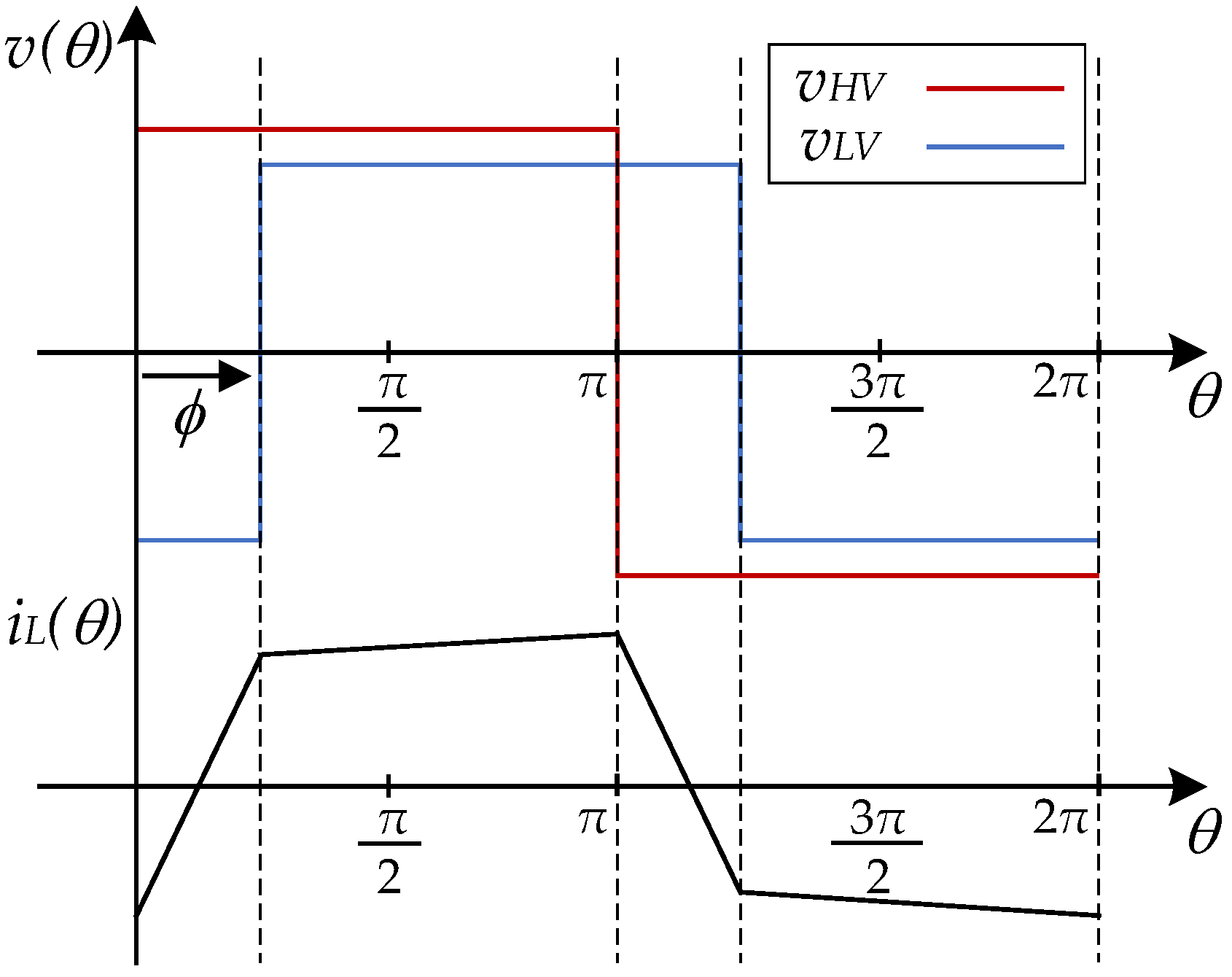
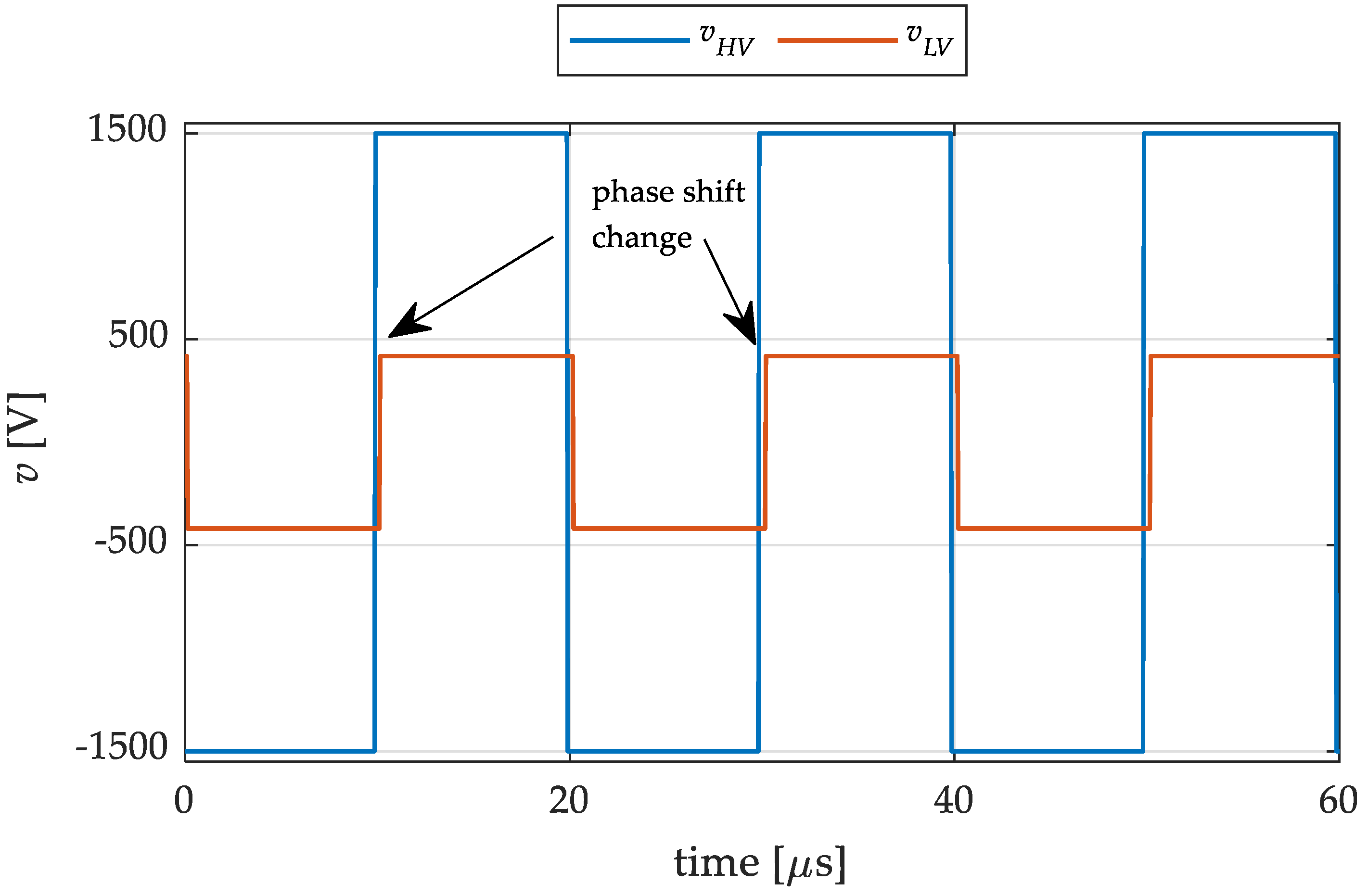
ϕ, the current peak is not affected since the angle difference is below the system resolution. This effect can also be visualized in
Figure 21, where the two voltage square waves
vHV and
vLV are reported and where it is possible to observe the slight change in the phase shift between the two.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}