

Frequency Regulation Strategy of Two-Area Microgrid System with Electric Vehicle Support Using Novel Fuzzy-Based Dual-Stage Controller and Modified Dragonfly Algorithm


Abstract
:1. Introduction
1.1. Motivation
1.2. Research Contribution
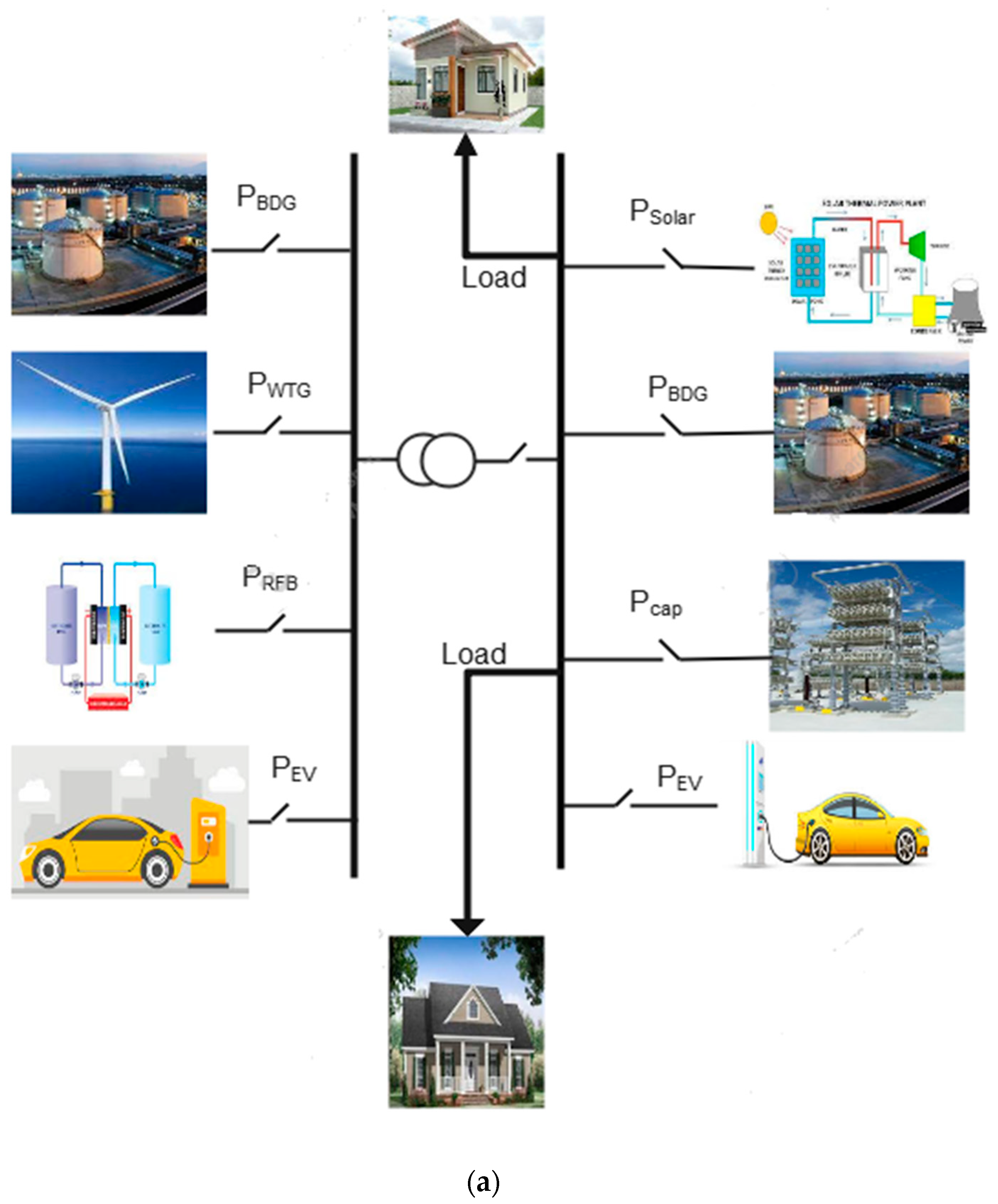
- A wind, solar, and biodiesel engine-based two-area isolated microgrid system (IMGS) is developed to perform the proposed research work.
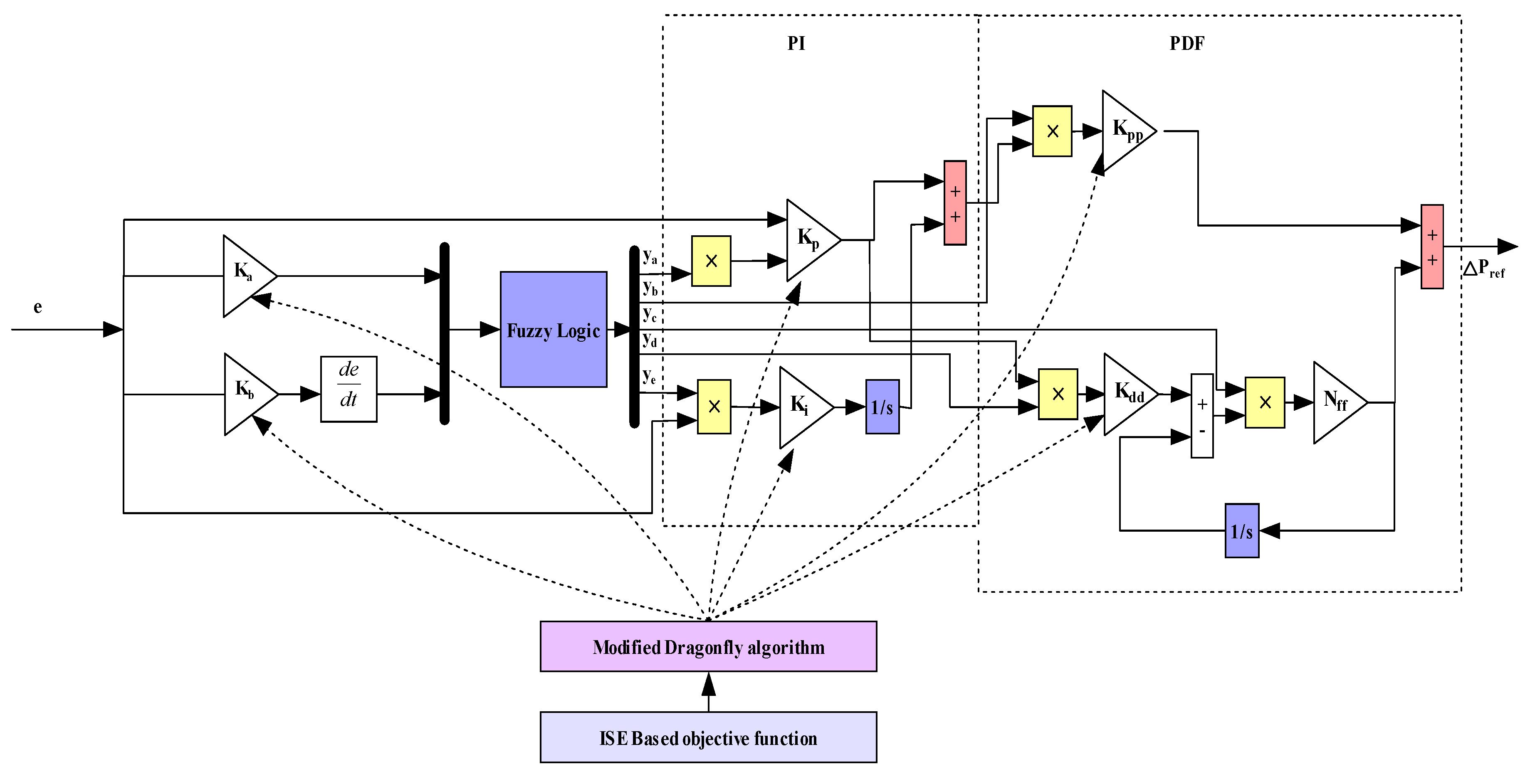
- Furthermore, a novel fuzzy-having modified PI-PDF scaled factor configuration i.e., a FLC-SF-PI-PDF controller, has been designed to improve the frequency regulation of the proposed MG.
- Modified dragon-fly optimization (MDA) has been deployed to find the optimal value of the gains of the proposed controller.
- Furthermore, the research also extends to measuring the consequence of several types of load, wind speed, and solar irradiance variation, such as step perturbation (SLP) and random variations in the system.
- The impact of EV integration in both areas has been analyzed and their abilities to ameliorate frequency regulation are demonstrated.
- Robustness analysis has also been performed to test the strength of the suggested controller for physical constraints and parametric uncertainties.
- Eigenvalue-based stability analyses have been performed to validate system stability within the proposed control strategy.
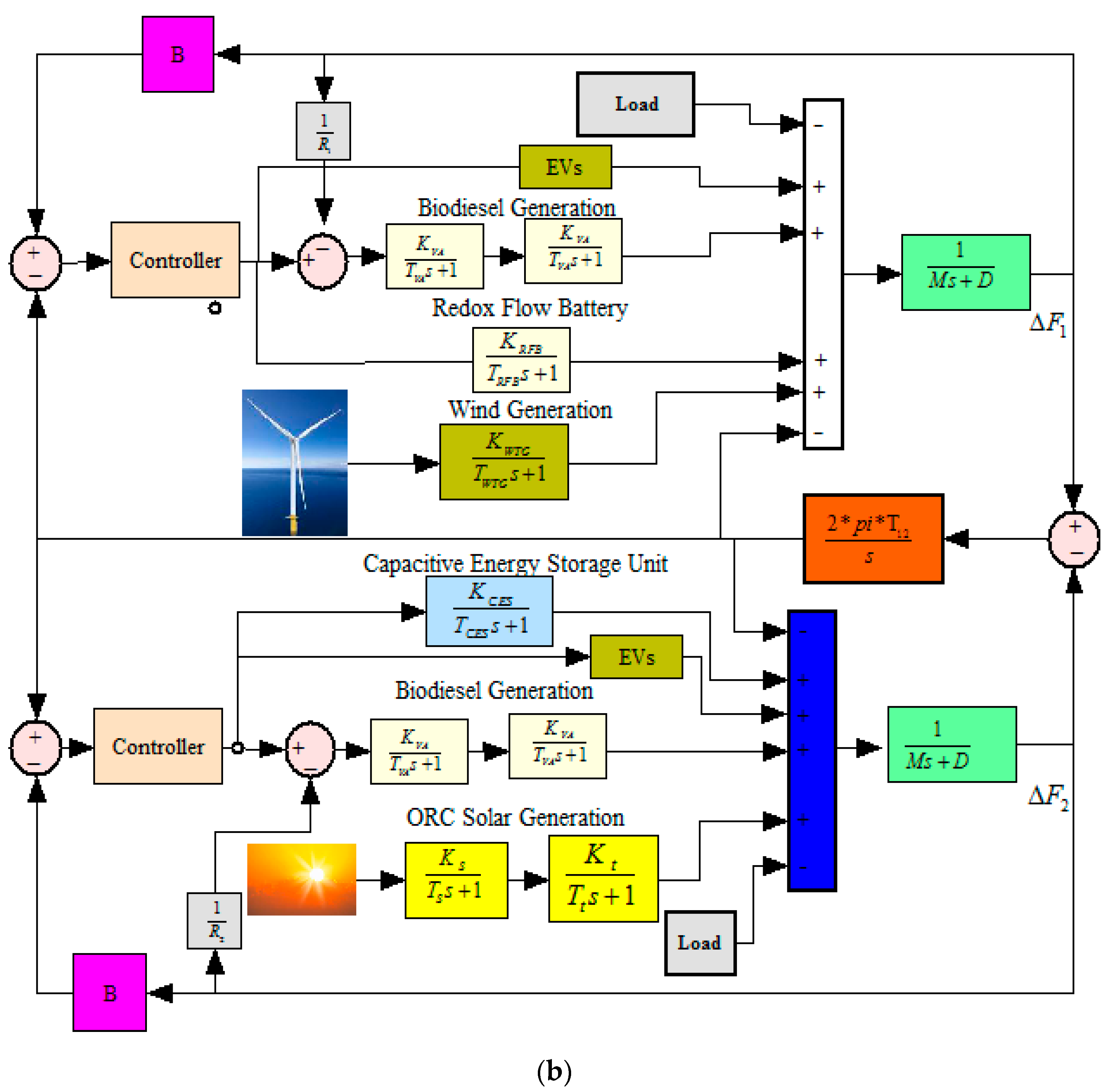
2. Modeling of Two-Area Islanded Microgrid System (IMGS)
2.1. Biodiesel Generator (BDG)
2.2. Organic Rankine Cycle (ORC) Solar
2.3. Wind Turbine Energy System
2.4. Capacitive Energy Storage (CES)
2.5. Redox Flow Battery (RFB)
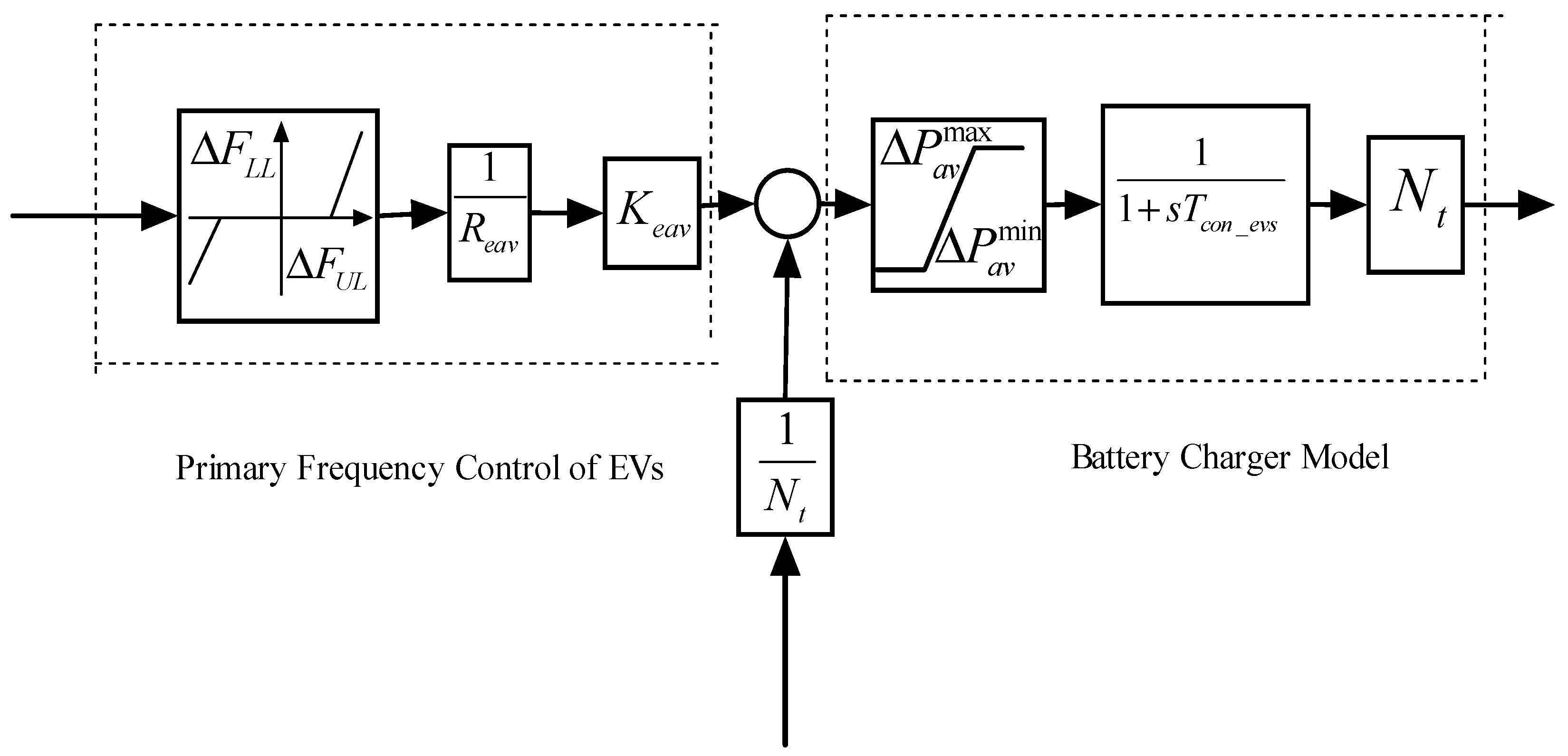
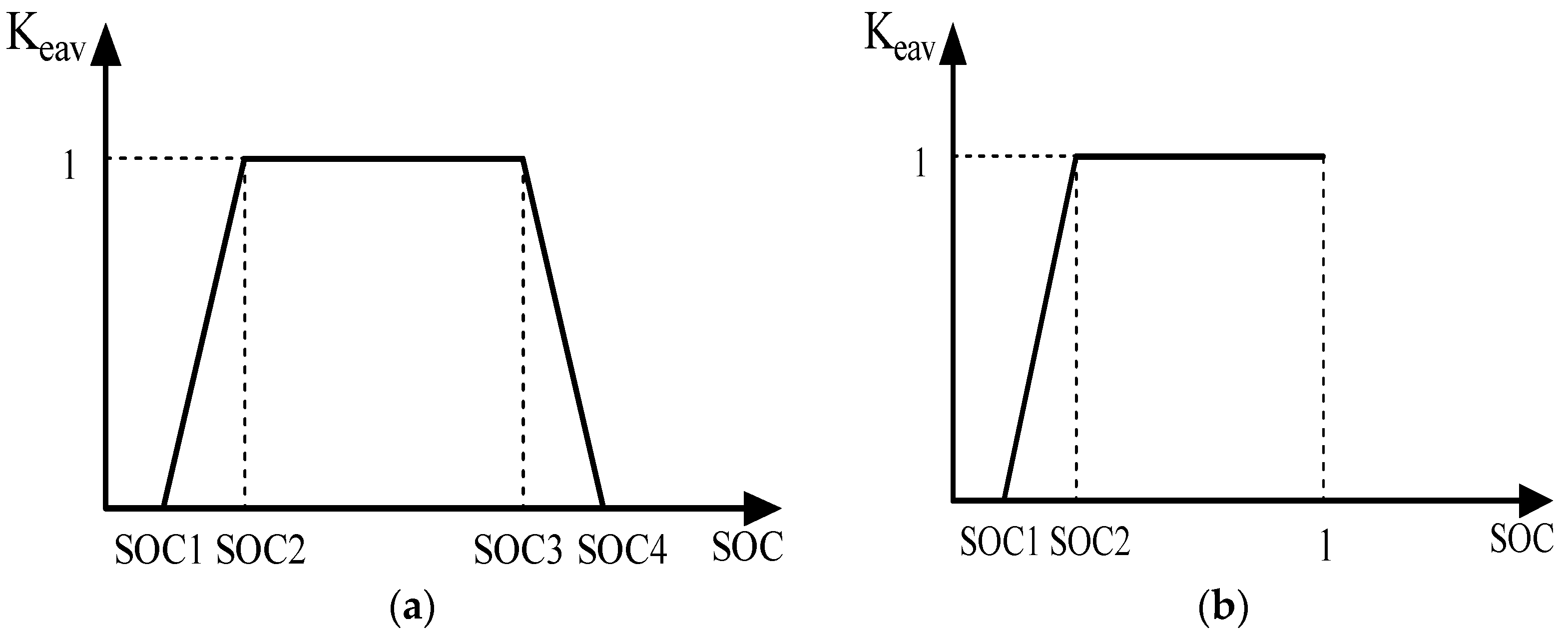
2.6. Electric Vehicle (EV)
3. Controller Synthesis
3.1. Controller Design
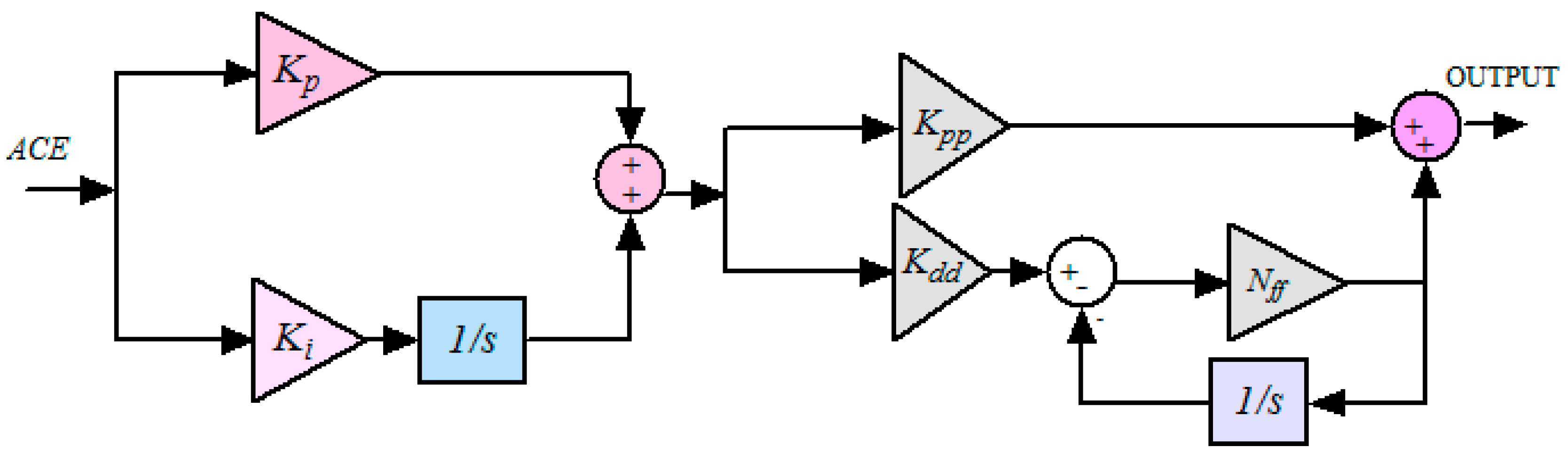
3.1.1. Control Method-1: PI-PDF Controller
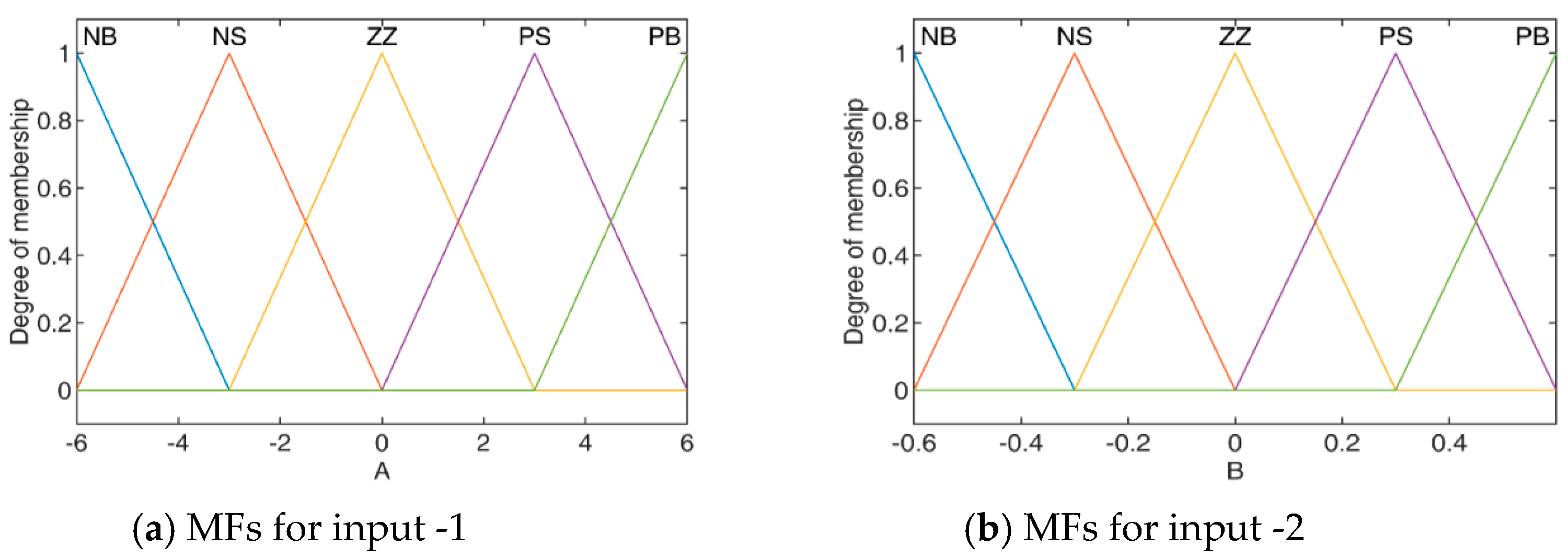
3.1.2. Control Method-2: FLC-PI-PDF Controller
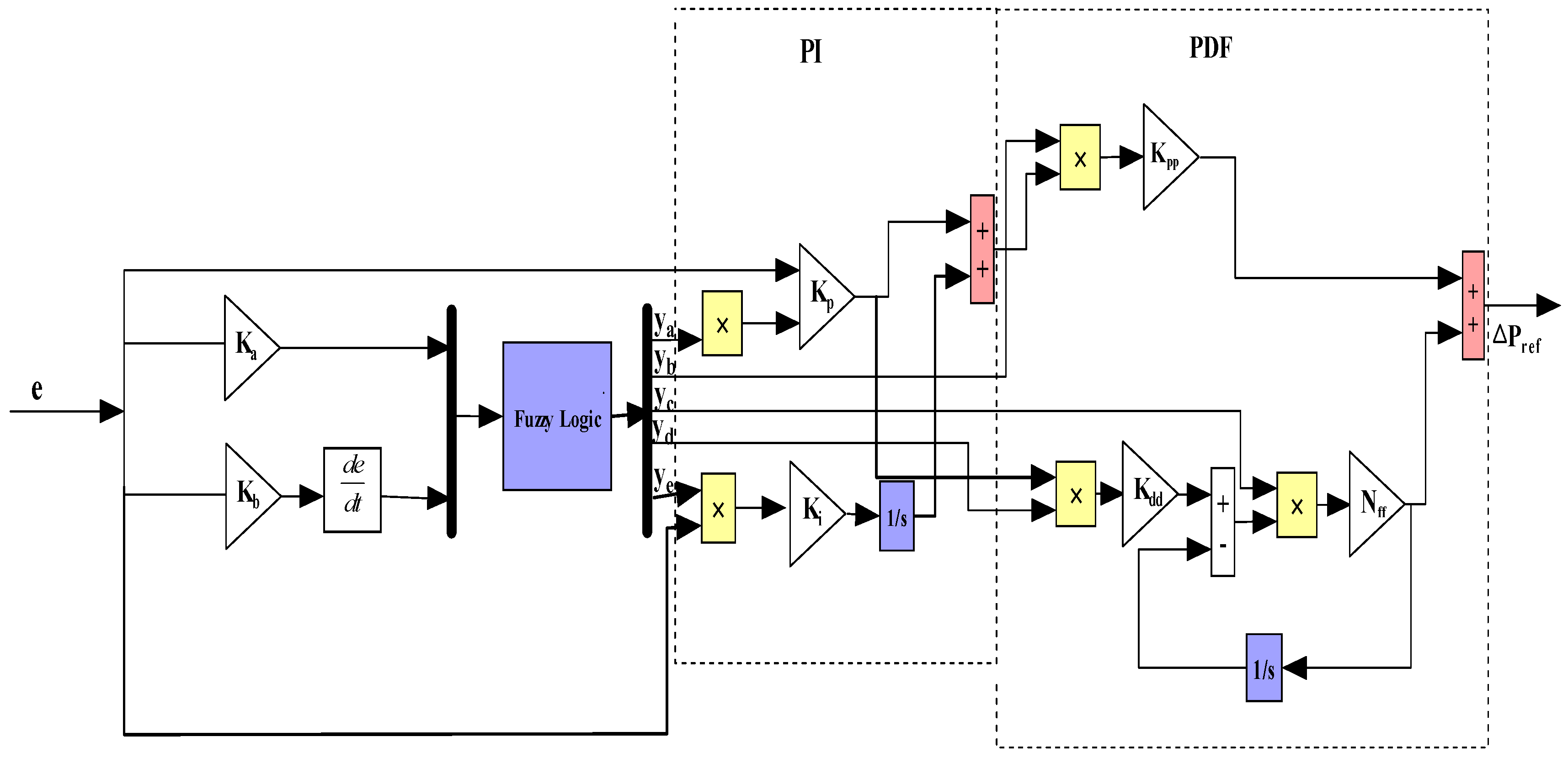
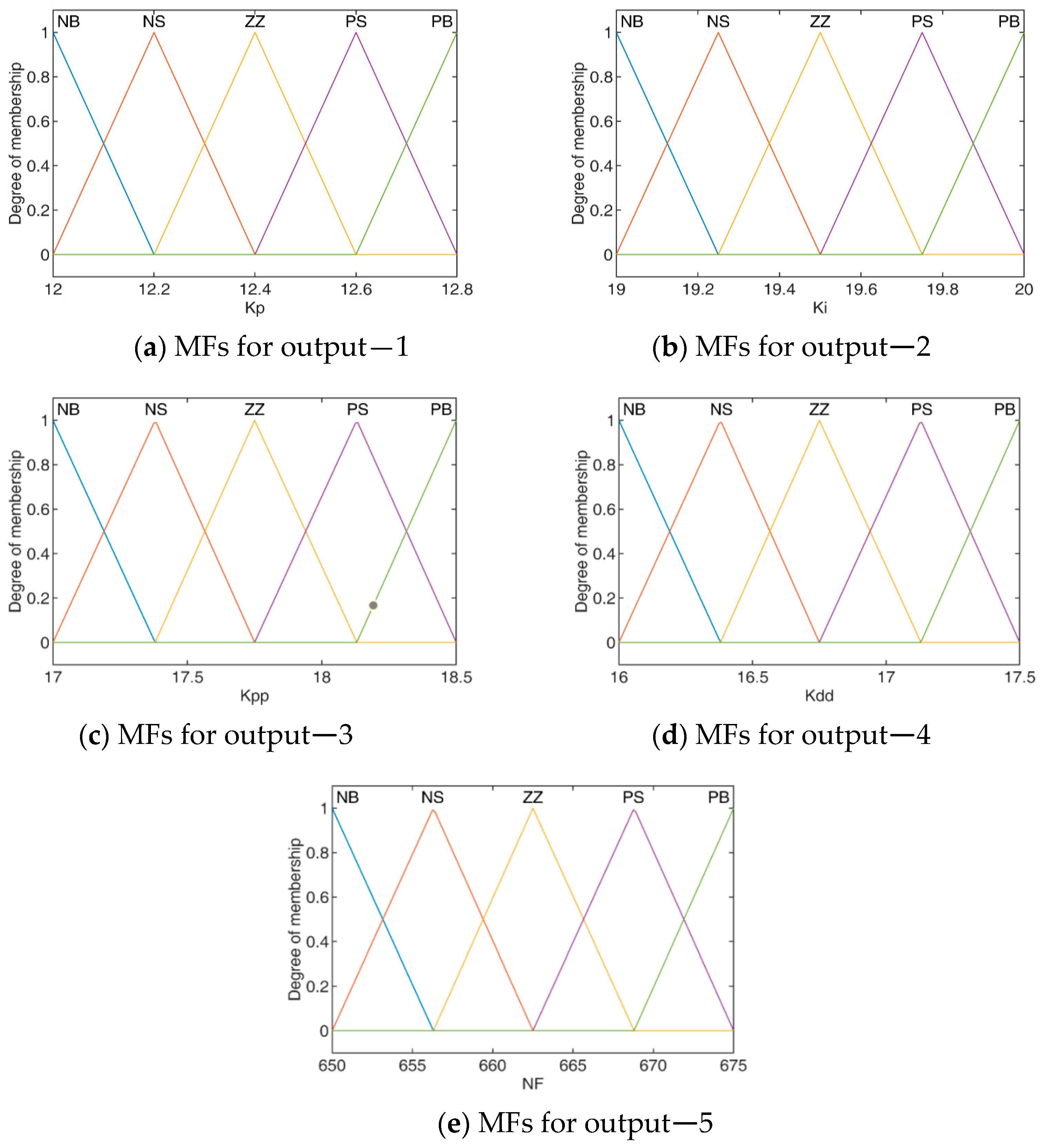
3.1.3. Control Method-3: FLC-SF-PI-PDF Controller
3.2. Objective Function
3.3. Modified Dragonfly Optimization
- (i)
- Seperation operator (Sq): this operator prevents the collision of the dragonfly with others flying in the vicinity.
- (ii)
- Aligment operator (Aq): this operator helps to match the flying speed of the dragonfly with other flies.
- (iii)
- Cohesion operator (Cq): this operator atttracts the individual dragonfly towards the center of the group.
| Algorithm 1. Pseudo-code of modified dragonfly optimization algorithm. | |
| 1. | Initialize ), and intial weight (w lies between 0.2–0.9). ) |
| 2. | Initiate the step vector + |
| 3. | for do |
| 4. | Determine each dragonfly’s fitness with reference to its position. |
| 5. | Update the food source and enemy location with respect to the dragonflies. |
| 6. | Determine from Here, x is the individual current position, while and are the qth position and speed of neighboring individual, respectively. N0 is the number of dragonflies in the group and () are the location of nearby food and enemy. |
| 7. | Upgrade the neighboring diameter of a dragonfly. |
| 8. | If an individual has at least one dragonfly in their vicinity, then |
| 9. | Upgrade the velocity vector as rand is a random number between (0 to 1) And Update the position vector as Levy is a standard levy flight function. |
| 10. | Otherwise, Upgrade |
| 11. | End if |
| 12. | Determine the insect fitness as per the newly updated position while considering its limitation. |
| 13. | End for |
| 14. | Preserve the best obtain solutions |
4. Results
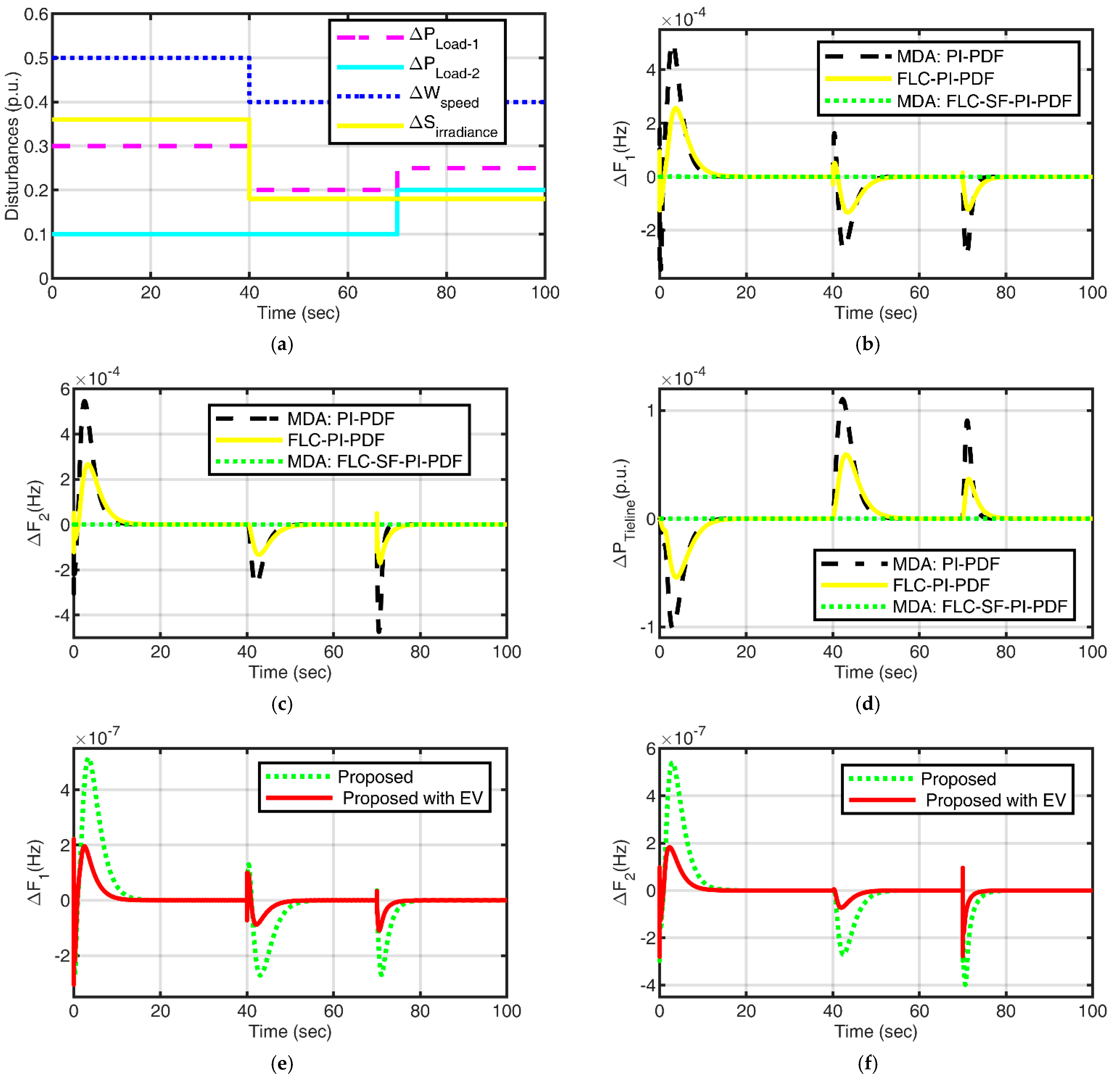
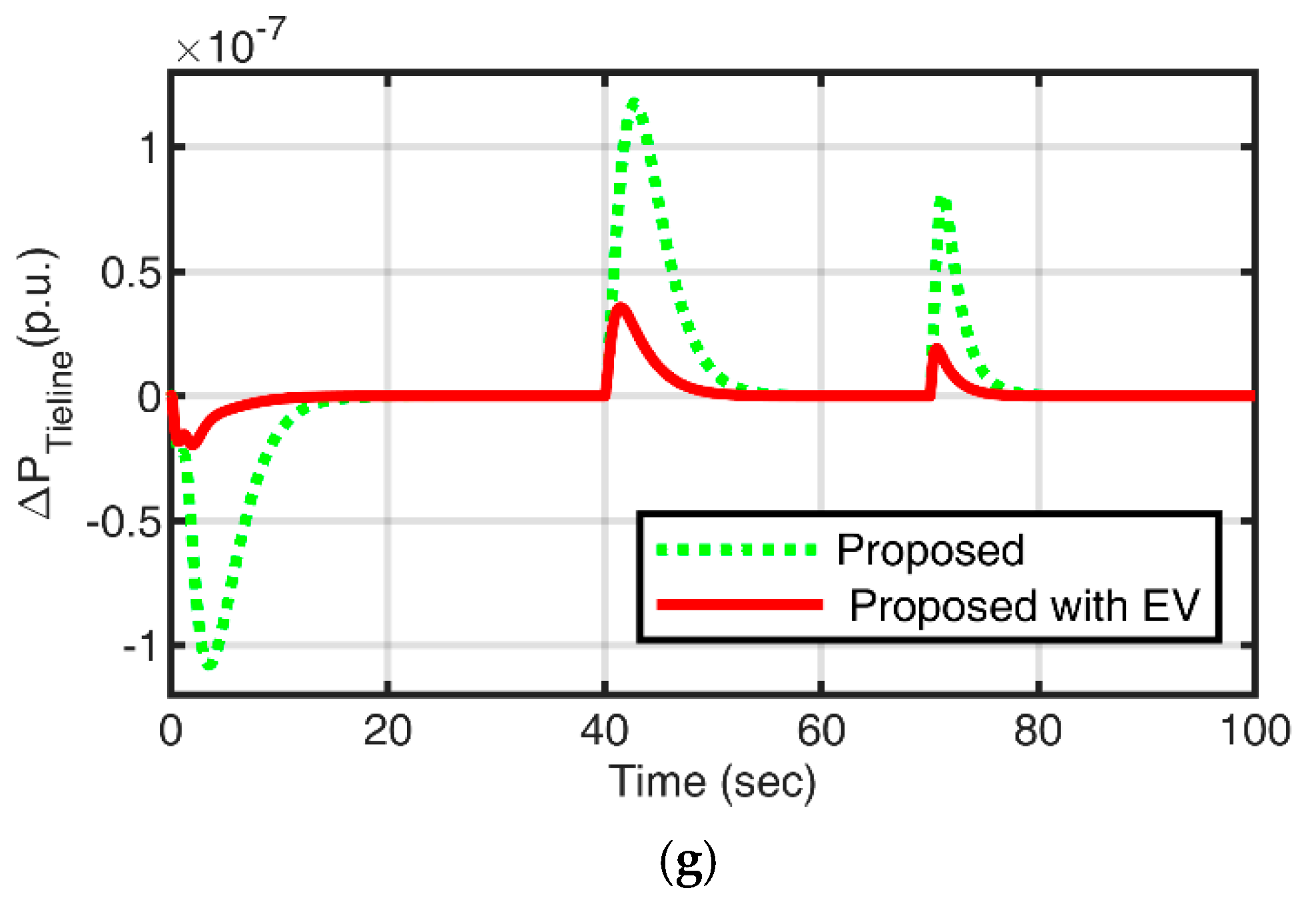
4.1. Case 1: Step Variations
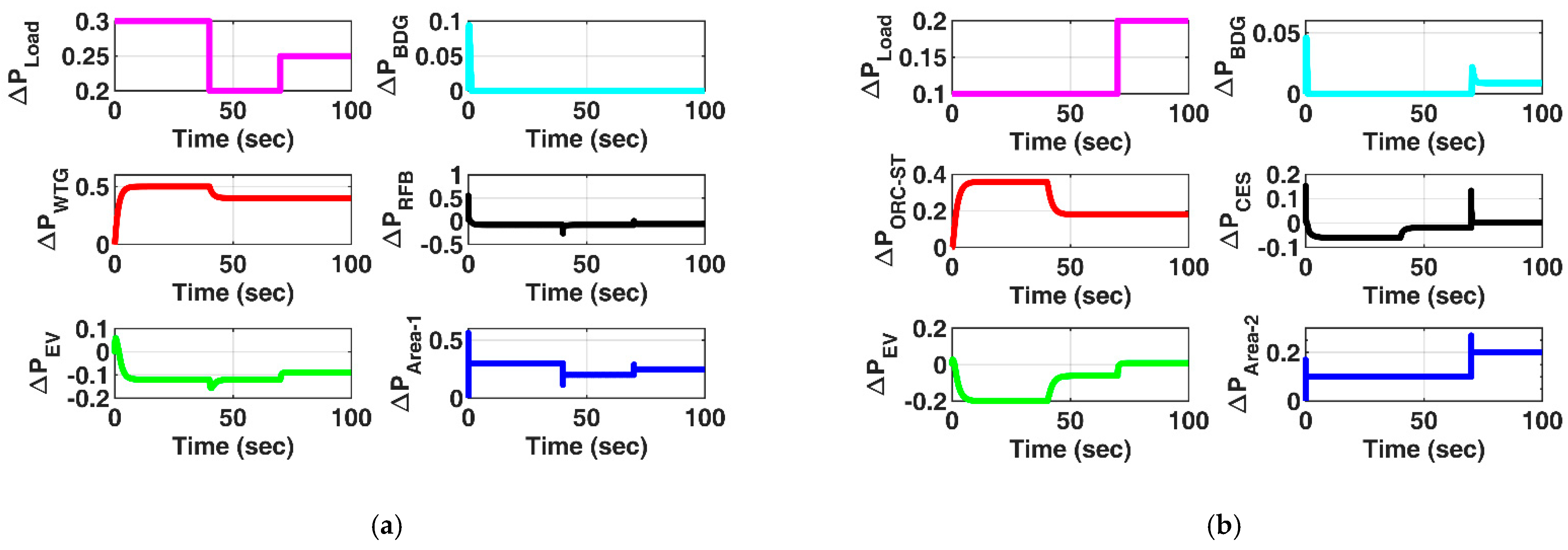
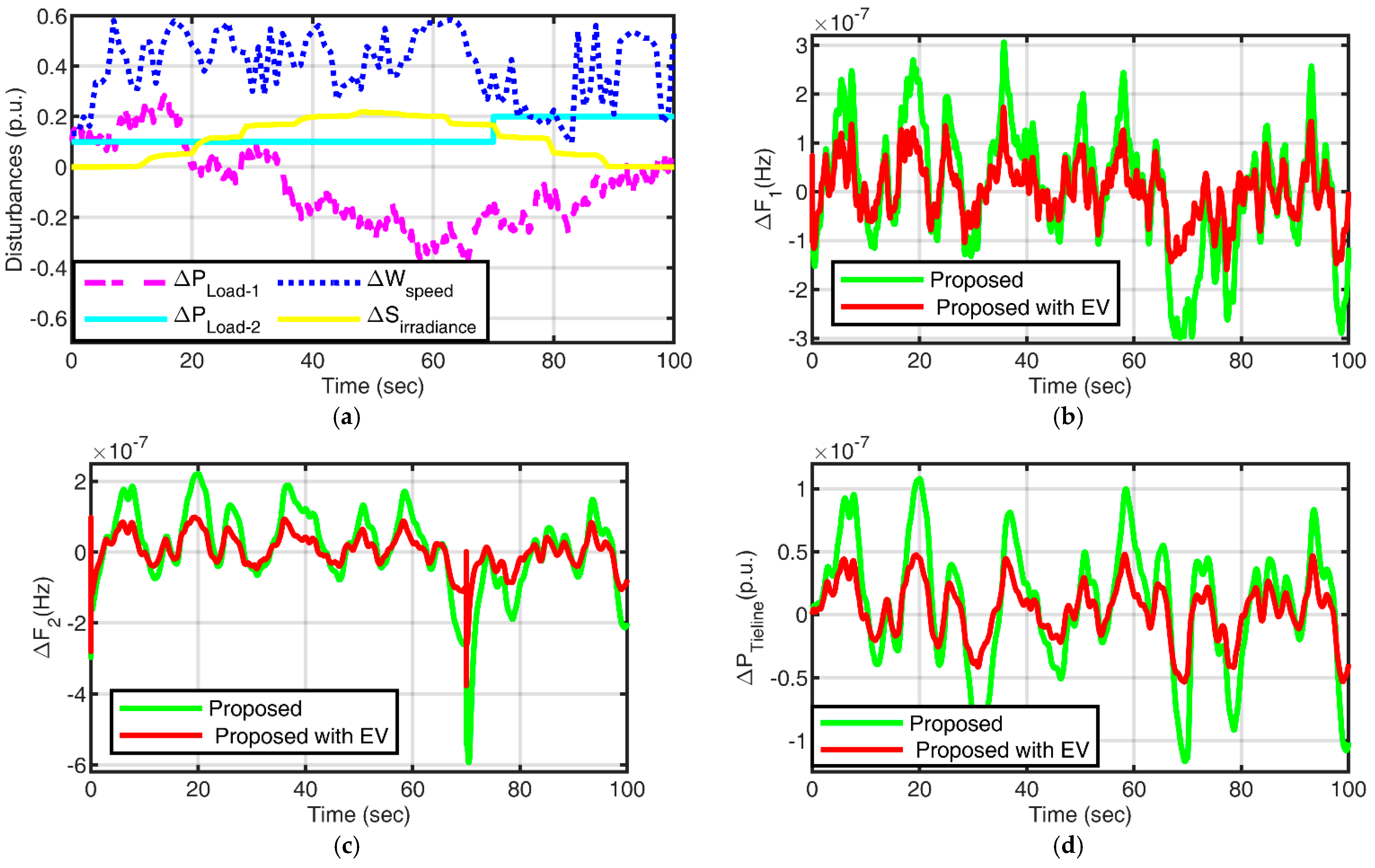
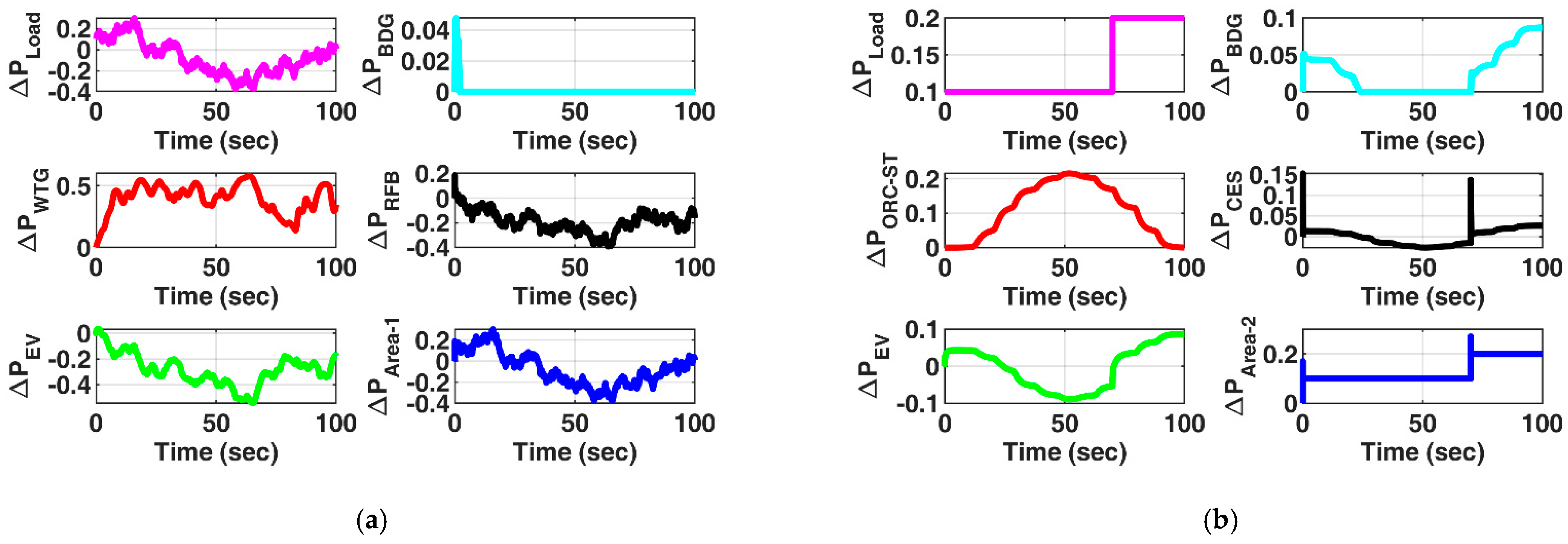
4.2. Case 2: Random Variation
4.3. Sensitivity Analysis
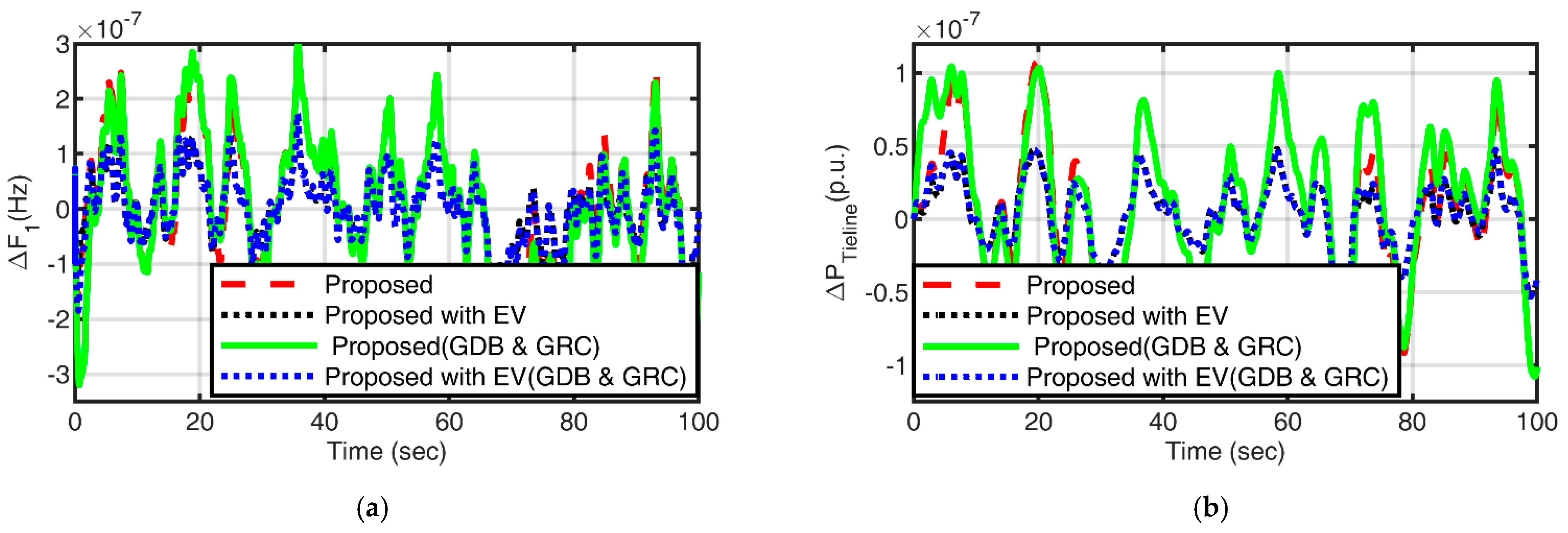
4.3.1. Physical Constraints
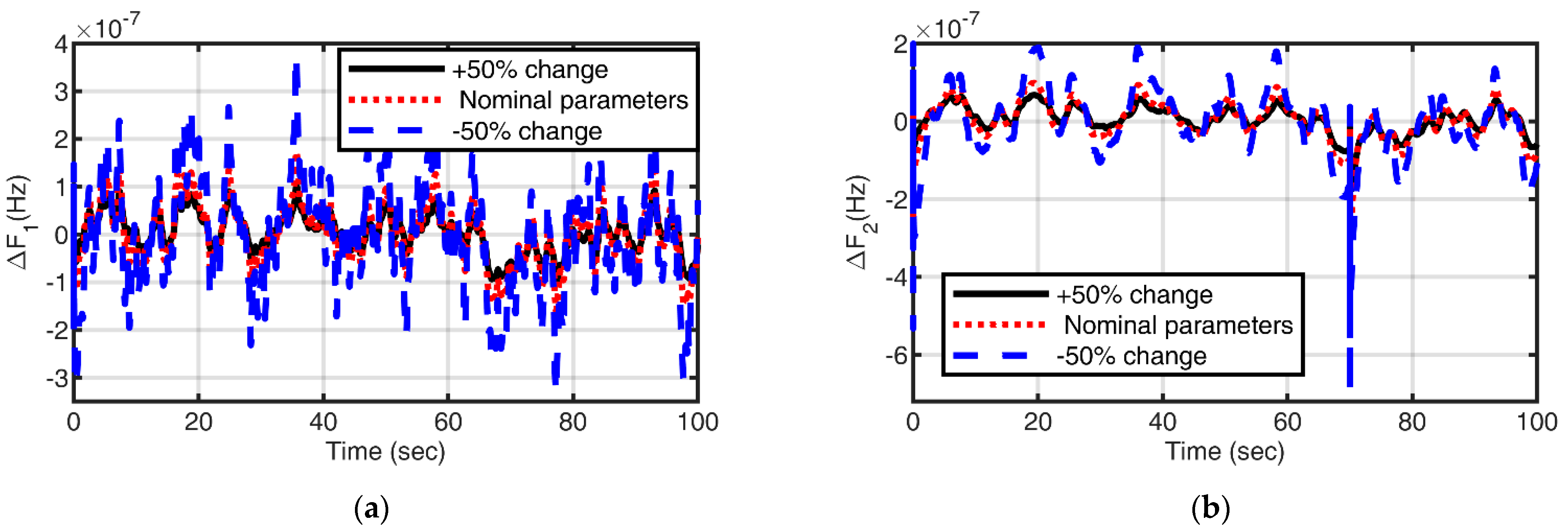
4.3.2. MG Parameter Variations
4.4. Stability Analysis
5. Conclusions
- The obtained results indicate that tuning the scaling factors using the modified dragonfly algorithm has a great impact on the performance of the fuzzy controller.
- The FLC-SF-PI-PDF controller tuned with MDA is the most suitable controller for the proposed two-area island microgrid.
- It is observed from different case studies that after the integration of EVs into MGs, the system performance improves significantly.
- After the integration of EVs, the percentage advancement in the performance indices of 71.2% (IAE), 74.13% (ITAE), 89.6% (ISE), and 91.2% (ITSE) for case 1 and 54.32% (IAE), 55.79% (ITAE), 63.73% (ISE), and 79.59% (ITSE) for case 2 are observed.
- The proposed LFC scheme also demonstrates robust performance under variable operating and loading conditions, system parametric uncertainties, and various non-linearities of the system.
- Eigenvalue analysis confirms the stability of the microgrid system working under the proposed LFC strategy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| KV | A valve gain of biodiesel generator (1) |
| TV | A valve actuator delay (0.05 s) |
| KBE | Engine gain of biodiesel generator (1) |
| KWTG | Wind turbine gain constant (1) |
| TWTG | Wind turbine time constant (1.5) |
| KCES | Capacitor gain (0.03) |
| TCES | Capacitor time constant (0.0352 s) |
| Kst | Gain of ORC solar turbine (1) |
| Tst | Time constant of ORC solar turbine (1.8 s) |
| KT | Gain of ORC solar generator (1) |
| TT | ORC solar power plant time constant (0.3) |
| KRFB | Gain constant of redox flow battery (0.67) |
| TRFB | Time constant of redox flow battery (0.01 s) |
| B | Frequency bias factor (0.510) |
| D | Damping factor (0.02) |
| M | Inertial constant of the system (0.012) |
| R | Droop constant (2.4 Hz/puMW) |
| T12 | Synchronizing torque coefficient of two areas (0.08) |
| Reav | EV droop constant (2.4 Hz/puMW) |
| Keav | Gain of EV (1) |
| Tcon_evs | Time constant of EV (1 s) |
| Nt | Total number of EVs |
| ∆f | Change in frequency |
| ∆Ptie | Change in tie-line power |
| Us; Os | Setting time, under shoot, over shoot |
| IAE | Integral absolute error |
| ITAE | Integral time absolute error |
| ISE | Integral square error |
| ITSE | Integral time square error |
| ACE | Area control error |
References
- Sarkar, T.; Bhattacharjee, A.; Samanta, H.; Bhattacharya, K.; Saha, H. Optimal design and implementation of solar PV-wind-biogas-VRFB storage integrated smart hybrid microgrid for ensuring zero loss of power supply probability. Energy Convers. Manag. 2019, 191, 102–118. [Google Scholar] [CrossRef]
- Nayak, P.C.; Prusty, U.C.; Prusty, R.C.; Panda, S. Imperialist competitive algorithm optimized cascade controller for load frequency control of multi-microgrid system. Energy Sources Part A Recover. Util. Environ. Eff. 2021, 00, 1–23. [Google Scholar] [CrossRef]
- Semshchikov, E.; Hamilton, J.; Wu, L.; Negnevitsky, M.; Wang, X.; Lyden, S. Frequency control within high renewable penetration hybrid systems adopting low load diesel methodologies. Energy Procedia 2019, 160, 483–490. [Google Scholar] [CrossRef]
- Rai, A.; Das, D.K. The development of a fuzzy tilt integral derivative controller based on the sailfish optimizer to solve load frequency control in a microgrid, incorporating energy storage systems. J. Energy Storage 2022, 48, 103887. [Google Scholar] [CrossRef]
- Sarkhanloo, M.S.; Bevrani, H.; Mirzaei, R. Environmental Effects A comprehensive coordinated frequency control scheme for double- fed induction generator wind turbine, battery, and diesel generators in islanded microgrids. Energy Sources Part A Recover. Util. Environ. Eff. 2021, 2021, 1–23. [Google Scholar]
- Dutta, A.; Prakash, S. Load frequency control of multi-area hybrid power system integrated with renewable energy sources utilizing FACTS & energy storage system. Environ. Prog. Sustain. Energy 2020, 39, 1–13. [Google Scholar]
- Rahman, A.; Saikia, L.C.; Sinha, N. Automatic generation control of an interconnected two-area hybrid thermal system considering dish-stirling solar thermal and wind turbine system. Renew. Energy 2017, 105, 41–54. [Google Scholar] [CrossRef]
- Singh, P.; Meena, N.K.; Slowik, A.; Bishnoi, S.K. Modified African Buffalo Optimization for Strategic Integration of Battery Energy Storage in Distribution Networks. IEEE Access 2020, 8, 14289–14301. [Google Scholar] [CrossRef]
- Sharma, M.; Bansal, R.K.; Prakash, S.; Dhundhara, S. Frequency Regulation in PV integrated Power System using MFO tuned PIDF controller. In Proceedings of the 2018 IEEE 8th Power India International Conference (PIICON), Kurukshetra, India, 10–12 December 2018; pp. 1–6. [Google Scholar]
- Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic generation control of multi-area power systems with diverse energy sources using Teaching Learning Based Optimization algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 113–134. [Google Scholar] [CrossRef] [Green Version]
- Satapathy, P.; Debnath, M.K.; Singh, M.B.; Mohanty, P.K. Design of FPI controller for load frequency control of a nonlinear power system. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; Volume 2018-Janua, pp. 1–6. [Google Scholar]
- Mohanty, B. TLBO optimized sliding mode controller for multi-area multi-source nonlinear interconnected AGC system Electrical Power and Energy Systems TLBO optimized sliding mode controller for multi-area multi-source nonlinear interconnected AGC system. Int. J. Electr. Power Energy Syst. 2019, 73, 872–881. [Google Scholar] [CrossRef]
- Shiva, C.K.; Mukherjee, V. A novel quasi-oppositional harmony search algorithm for AGC optimization of three-area multi-unit power system after deregulation. Eng. Sci. Technol. Int. J. 2016, 19, 395–420. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.; Tyagi, B.; Kumar, V. Deregulated Multiarea AGC Scheme Using BBBC-FOPID Controller. Arab. J. Sci. Eng. 2017, 42, 2641–2649. [Google Scholar] [CrossRef]
- Sharma, M.; Prakash, S.; Saxena, S.; Dhundhara, S. Optimal Fractional-Order Tilted-Integral-Derivative Controller for Frequency Stabilization in Hybrid Power System Using Salp Swarm Algorithm. Electr. Power Compon. Syst. 2021, 48, 1912–1931. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Double stage controller optimization for load frequency stabilization in hybrid wind-ocean wave energy based maritime microgrid system. Appl. Energy 2021, 282, 116171. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; El-Hameed, M.A. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimiser. IET Gener. Transm. Distrib. 2017, 11, 637–648. [Google Scholar] [CrossRef]
- Singh, B.; Slowik, A.; Bishnoi, S.K. A Dual-Stage Controller for Frequency Regulation in a Two-Area Realistic Diverse Hybrid Power System Using Bull–Lion Optimization. Energies 2022, 15, 8063. [Google Scholar] [CrossRef]
- Cam, E.; Gorel, G.; Mamur, H. Use of the Genetic Algorithm-Based Fuzzy Logic Controller for Load-Frequency Control in a Two Area Interconnected Power System. Appl. Sci. 2017, 7, 308. [Google Scholar] [CrossRef] [Green Version]
- Nanda, J.; Mangla, A. Automatic Generation Control of an Interconnected and Fuzzy Logic Controller. In Proceedings of the 2004 IEEE International Conference on Electric Utility Deregulation, Restructuring and Power Technologies, Hong Kong, China, 5–8 April 2004; pp. 372–377. [Google Scholar]
- Mohammadikia, R.; Aliasghary, M. A fractional order fuzzy PID for load frequency control of four-area interconnected power system using biogeography-based optimization. Int. Trans. Electr. Energy Syst. 2019, 29, e2735. [Google Scholar] [CrossRef]
- Yakout, A.H.; Attia, M.A.; Kotb, H. Marine Predator Algorithm based Cascaded PIDA Load Frequency Controller for Electric Power Systems with Wave Energy Conversion Systems. Alex. Eng. J. 2021, 60, 4213–4222. [Google Scholar] [CrossRef]
- Choudhary, A.K.; Prakash, S.; Sharma, M.; Dhundhara, S. Grasshopper optimisation based robust power/frequency regulator for shipboard. IET Renew. Power Gener. 2020, 14, 3568–3577. [Google Scholar] [CrossRef]
- Singh, A.; Suhag, S. Frequency regulation in an AC microgrid interconnected with thermal system employing multiverse-optimised fractional order-PID controller. Int. J. Sustain. Energy 2020, 39, 250–262. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T. A new intelligent online fuzzy tuning approach for multi-area load frequency control: Self Adaptive Modified Bat Algorithm. Int. J. Electr. Power Energy Syst. 2015, 71, 254–261. [Google Scholar] [CrossRef]
- Aryan, P.; Raja, G.L. Design and Analysis of Novel QOEO Optimized Parallel Fuzzy FOPI-PIDN Controller for Restructured AGC with HVDC and PEV. Iran. J. Sci. Technol. Trans. Electr. Eng. 2022, 46, 565–587. [Google Scholar] [CrossRef]
- Esmaeili, M.; Shayeghi, H.; Nooshyar, M.; Aryanpour, H. Design of new controller for load frequency control of isolated microgrid considering system uncertainties. Int. J. Power Energy Convers. 2018, 9, 285. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Shasadeghi, M.; Dragicevic, T.; Blaabjerg, F. Load Frequency Control in Microgrids Based on a Stochastic Noninteger Controller. IEEE Trans. Sustain. Energy 2018, 9, 853–861. [Google Scholar] [CrossRef]
- Elsisi, M.; Bazmohammadi, N.; Guerrero, J.M.; Ebrahim, M.A. Energy management of controllable loads in multi-area power systems with wind power penetration based on new supervisor fuzzy nonlinear sliding mode control. Energy 2021, 221, 119867. [Google Scholar] [CrossRef]
- Kocaarslan, I.; Çam, E. Fuzzy logic controller in interconnected electrical power systems for load-frequency control. Int. J. Electr. Power Energy Syst. 2005, 27, 542–549. [Google Scholar] [CrossRef]
- Arya, Y. Automatic generation control of two-area electrical power systems via optimal fuzzy classical controller. J. Frankl. Inst. 2018, 355, 2662–2688. [Google Scholar] [CrossRef]
- Tripathy, D.; Behera, S.; Choudhury, N.B.D. Implementation of Grasshopper optimization algorithm based cascaded fuzzy PD-PI controller for frequency stability in a multi-area power system. J. Interdiscip. Math. 2020, 23, 335–345. [Google Scholar] [CrossRef]
- Çelik, E.; Öztürk, N. Novel fuzzy 1PD-TI controller for AGC of interconnected electric power systems with renewable power generation and energy storage devices. Eng. Sci. Technol. Int. J. 2022, 35, 101166. [Google Scholar] [CrossRef]
- Annapoorani, K.I.; Rajaguru, V.; Padmanabhan, S.A.; Kumar, K.M.; Venkatachalam, S. Fuzzy logic-based integral controller for load frequency control in an isolated micro-grid with superconducting magnetic energy storage unit. Mater. Today Proc. 2022, 58, 244–250. [Google Scholar] [CrossRef]
- Aftab, M.A.; Hussain, S.M.S.; Latif, A.; Das, D.C.; Ustun, T.S. IEC 61850 communication based dual stage load frequency controller for isolated hybrid microgrid. Int. J. Electr. Power Energy Syst. 2021, 130, 106909. [Google Scholar] [CrossRef]
- Sharma, M.; Dhundhara, S.; Singh, R. Impact of hybrid electrical energy storage system on realistic deregulated power system having large-scale renewable generation. Sustain. Energy Technol. Assess. 2023, 56, 103025. [Google Scholar] [CrossRef]
- Dutta, A.; Debbarma, S. Frequency regulation in deregulated market using vehicle-to-grid services in residential distribution network. IEEE Syst. J. 2018, 12, 2812–2820. [Google Scholar] [CrossRef]
- Dutta, A.; Prakash, S. Utilizing Electric Vehicles and Renewable Energy Sources for Load Frequency Control in Deregulated Power System Using Emotional Controller. IETE J. Res. 2022, 68, 1500–1511. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P. An Aggregate Model of Plug-In Electric Vehicles for Primary Frequency Control. IEEE Trans. Power Syst. 2015, 30, 1475–1482. [Google Scholar] [CrossRef]
- Latif, A.; Das, D.C.; Barik, A.K.; Ranjan, S. Maiden coordinated load frequency control strategy for ST-AWEC-GEC-BDDG-based independent three-area interconnected microgrid system with the combined effect of diverse energy storage and DC link using BOA-optimised PFOID controller. IET Renew. Power Gener. 2019, 13, 2634–2646. [Google Scholar] [CrossRef]
- Das, D.C.; Sinha, N.; Roy, A.K. Automatic Generation Control of an Organic Rankine Cycle Solar-Thermal/Wind-Diesel Hybrid Energy System. Energy Technol. 2014, 2, 721–731. [Google Scholar] [CrossRef]
- Bhuyan, M.; Barik, A.K.; Das, D.C. GOA optimised frequency control of solar-thermal/sea-wave/biodiesel generator based interconnected hybrid microgrids with DC link. Int. J. Sustain. Energy 2020, 39, 615–633. [Google Scholar] [CrossRef]
- Abazari, A.; Monsef, H.; Wu, B. Coordination strategies of distributed energy resources including FESS, DEG, FC and WTG in load frequency control (LFC) scheme of hybrid isolated micro-grid. Int. J. Electr. Power Energy Syst. 2019, 109, 535–547. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. Coordinated Control of Wind Turbine Blade Pitch Angle and PHEVs Using MPCs for Load Frequency Control of Microgrid. IEEE Syst. J. 2016, 10, 97–105. [Google Scholar] [CrossRef]
- Srinivasarathnam, C.; Yammani, C.; Maheswarapu, S. Load Frequency Control of Multi-microgrid System considering Renewable Energy Sources Using Grey Wolf Optimization. Smart Sci. 2019, 7, 198–217. [Google Scholar]
- Singh, B.; Bishnoi, S.K.; Sharma, M.; Singh, P.; Dhundhara, S. An application of nature inspried algorithm based dual-stage frequency control strategy for multi micro-grid system. Ain Shams Eng. J. 2023, 102125. [Google Scholar] [CrossRef]
- Kamat, P.V.; Schanze, K.S.; Buriak, J.M. Redox Flow Batteries. ACS Energy Lett. 2017, 2, 1368–1369. [Google Scholar] [CrossRef] [Green Version]
- Arya, Y. Effect of electric vehicles on load frequency control in interconnected thermal and hydrothermal power systems utilising CF-FOIDF controller. IET Gener. Transm. Distrib. 2020, 14, 2666–2675. [Google Scholar] [CrossRef]
- Masuta, T.; Yokoyama, A. Supplementary load frequency control by use of a number of both electric vehicles and heat pump water heaters. IEEE Trans. Smart Grid 2012, 3, 1253–1262. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P.; Ramirez-Elizondo, L.; Bauer, P. Aggregation of plug-in electric vehicles in distribution networks for primary frequency control. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014; pp. 1–7. [Google Scholar]
- Safari, A.; Babaei, F.; Farrokhifar, M. A load frequency control using a PSO-based ANN for micro-grids in the presence of electric vehicles. Int. J. Ambient Energy 2021, 42, 688–700. [Google Scholar] [CrossRef]
- Sharma, M.; Bansal, R.K.; Prakash, S.; Asefi, S. MVO Algorithm Based LFC Design of a Six-Area Hybrid Diverse Power System Integrating IPFC and RFB. IETE J. Res. 2021, 67, 394–407. [Google Scholar] [CrossRef]
- Latif, A.; Das, D.C.; Ranjan, S.; Barik, A.K. Comparative performance evaluation of WCA-optimised non-integer controller employed with WPG–DSPG–PHEV based isolated two-area interconnected microgrid system. IET Renew. Power Gener. 2019, 13, 725–736. [Google Scholar] [CrossRef]
- Sharma, M.; Saxena, S.; Prakash, S.; Dhundhara, S.; Arya, Y. Frequency stabilization in sustainable energy sources integrated power systems using novel cascade noninteger fuzzy controller. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 44, 6213–6235. [Google Scholar] [CrossRef]
- Prusty, U.C.; Nayak, P.C.; Prusty, R.C.; Panda, S. An improved moth swarm algorithm based fractional order type-2 fuzzy PID controller for frequency regulation of microgrid system. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 1–23. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Singh, P.; Meena, N.K.; Yang, J.; Bishnoi, S.K.; Vega-Fuentes, E.; Lou, C. Modified Dragonfly Optimisation for Distributed Energy Mix in Distribution Networks. Energies 2021, 14, 5690. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | |||||
|---|---|---|---|---|---|
| NB | NS | ZZ | PS | PB | |
| NB | NB | NB | NS | NS | ZZ |
| NS | NB | NS | NS | ZZ | PS |
| ZZ | NB | NS | ZZ | PS | PB |
| PS | NS | ZZ | PS | PS | PB |
| PB | ZZ | PS | PS | PB | PB |
| Scaling | Ka | Kb | Kp | Ki | Kpp | Kdd | Nff |
|---|---|---|---|---|---|---|---|
| Min | 1 | 1 | 10 | 10 | 10 | 15 | 500 |
| Max | 10 | 10 | 25 | 25 | 25 | 25 | 100 |
| Performance Indicators | MDA: PI-PDF | FLC-PI-PDF | MDA: FLC-SF-PI-PDF (Proposed) | MDA: FLC-SF-PI-PDF with EVs (Proposed with EVs) |
|---|---|---|---|---|
| IAE | 0.0085489 | 0.0056852 | 1.0738 × 10−5 | 3.0154 × 10−6 |
| ITAE | 0.22119 | 0.15647 | 0.00029012 | 7.4676 × 10−5 |
| ISE | 2.2071 × 10−6 | 7.0244 × 10−7 | 2.7032 × 10−12 | 2.8188 × 10−13 |
| ITSE | 4.4524 × 10−5 | 1.3394 × 10−5 | 5.2113 × 10−11 | 4.6227 × 10−12 |
| F1_US (Hz) | −0.00034756 | −0.00013462 | −3.0741 × 10−7 | −3.0517 × 10−7 |
| F1_OS (Hz) | 0.00050531 | 0.00025623 | 5.1543 × 10−7 | 2.2129 × 10−7 |
| F2_US (Hz) | −0.00047368 | −0.00016959 | −3.9833 × 10−7 | −2.8031 × 10−7 |
| F2_OS (Hz) | 0.00054542 | 0.00026568 | 5.3916 × 10−7 | 1.8254 × 10−7 |
| Ptie_US (puMW) | −0.00010192 | −5.4275 × 10−5 | −1.0797 × 10−7 | −1.9628 × 10−8 |
| Ptie_OS (puMW) | 0.00011049 | 5.9288 × 10−5 | 1.1777 × 10−7 | 3.565 × 10−8 |
| Performance Indicators | MDA: FLC-SF-PI-PDF (Proposed with EVs) | MDA: FLC-SF-PI-PDF with EVs (Proposed with EVs) |
|---|---|---|
| IAE | 2.2555 × 10−5 | 1.053 × 10−5 |
| ITAE | 0.0011313 | 0.00052272 |
| ISE | 1.845 × 10−12 | 6.6924 × 10−13 |
| ITSE | 1.6906 × 10−10 | 3.4506 × 10−11 |
| F1_US (Hz) | −2.9907 × 10−7 | −1.5938 × 10−7 |
| F1_OS (Hz) | 3.0613 × 10−7 | 1.7292 × 10−7 |
| F2_US (Hz) | −5.9329 × 10−7 | −3.7614 × 10−7 |
| F2_OS (Hz) | 2.2141 × 10−7 | 9.8764 × 10−8 |
| Ptie_US (puMW) | 1.1685 × 10−7 | −5.3433 × 10−8 |
| Ptie_OS (puMW) | 1.0808 × 10−7 | 4.7799 × 10−8 |
| Approach | Eigenvalues |
|---|---|
| FLC-PI-PDF | −448.2286 + 12038.7973i, −448.2286 − 12038.7973i, −410.3883 + 4277.84193i −410.3883 − 4277.8419i, −16.5885 + 0.0000i, −15.5475 + 0.0000i, −6.0049 + 0.0000i, −11.1358 + 0.0000i, −1.9742 + 0.0000i, −1.4280 + 0.0000i, −1.4292 + 0.0000i, −0.5933 + 0.0000i, −0.5932 + 0.0000i, −0.6667 + 0.0000i, −3.3333 + 0.0000i, −0.5556 + 0.0000i |
| Proposed | −206255.8326 + 4961853.4894i, −206255.8326 − 4961853.4894i, −206217.9890 + 1759167.9394i, −206217.9890 − 1759167.9393i, −16.5857 + 0.0000i, −6.0112 + 0.0000i, −15.5376 + 0.0000i, −11.1556 + 0.0000i, −1.9711 + 0.0000i, −2.1804 + 0.0000i, −2.1803 + 0.0000i, −0.6317 + 0.0000i, −0.6317 + 0.0000i, −0.6667 + 0.0000i, −3.3333 + 0.0000i, −0.5556 + 0.0000i |
| Proposed with EV | −206255.1091 + 4998808.5231i, −206255.1091 − 4998808.5231i, −206216.7962 + 1860851.4840i, −206216.7962 − 1860851.4840i, −16.1404 + 0.0000i, −14.3903 + 2.1016i, −14.3902 − 2.1016i, −7.6271 + 0.0000i, −0.6319 + 0.0000i, −0.6312 + 0.0000i, −1.2750 + 0.0000i, −1.2973 + 0.0000i, −2.1826 + 0.0000i, −2.1805 + 0.0000i, −1.9716 + 0.0000i −0.6667 + 0.0000i, −3.3333 + 0.0000i, −0.5556 + 0.0000i |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, B.; Slowik, A.; Bishnoi, S.K.; Sharma, M. Frequency Regulation Strategy of Two-Area Microgrid System with Electric Vehicle Support Using Novel Fuzzy-Based Dual-Stage Controller and Modified Dragonfly Algorithm. Energies 2023, 16, 3407. https://doi.org/10.3390/en16083407
Singh B, Slowik A, Bishnoi SK, Sharma M. Frequency Regulation Strategy of Two-Area Microgrid System with Electric Vehicle Support Using Novel Fuzzy-Based Dual-Stage Controller and Modified Dragonfly Algorithm. Energies. 2023; 16(8):3407. https://doi.org/10.3390/en16083407
Chicago/Turabian StyleSingh, Balvender, Adam Slowik, Shree Krishan Bishnoi, and Mandeep Sharma. 2023. "Frequency Regulation Strategy of Two-Area Microgrid System with Electric Vehicle Support Using Novel Fuzzy-Based Dual-Stage Controller and Modified Dragonfly Algorithm" Energies 16, no. 8: 3407. https://doi.org/10.3390/en16083407