
The Double Lanes Cell Transmission Model of Mixed Traffic Flow in Urban Intelligent Network
 , , and
, , and
Abstract
:1. Introduction
2. Research Methodology
2.1. The Analysis of Driving Characteristics
2.1.1. Car-Following Model
- HV car-following model based on IDM
- AV car-following model based on ACC
- CAV car-following model based on CACC
2.1.2. Vehicle Proportion Allocation
- AV is only degenerated by CAV following HV.
- When CAV forms a fleet, only the first vehicle of the fleet degenerates to AV.
- The mesoscopic model IDM does not consider the response time of vehicles in the same lane of the same road section.
2.1.3. Analytical Expression of Traffic Flow
2.2. Lane-Changing Judgment Mechanism
2.2.1. Random Utility Theory
2.2.2. Lane-Changing Revenue Model

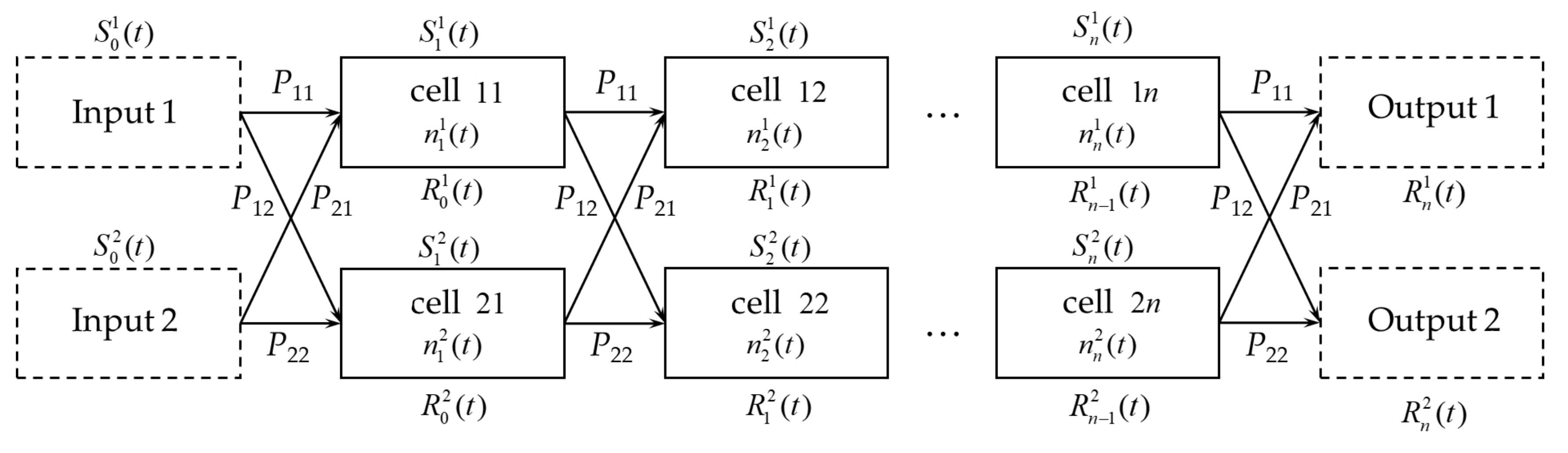
2.3. Double Lanes CTM
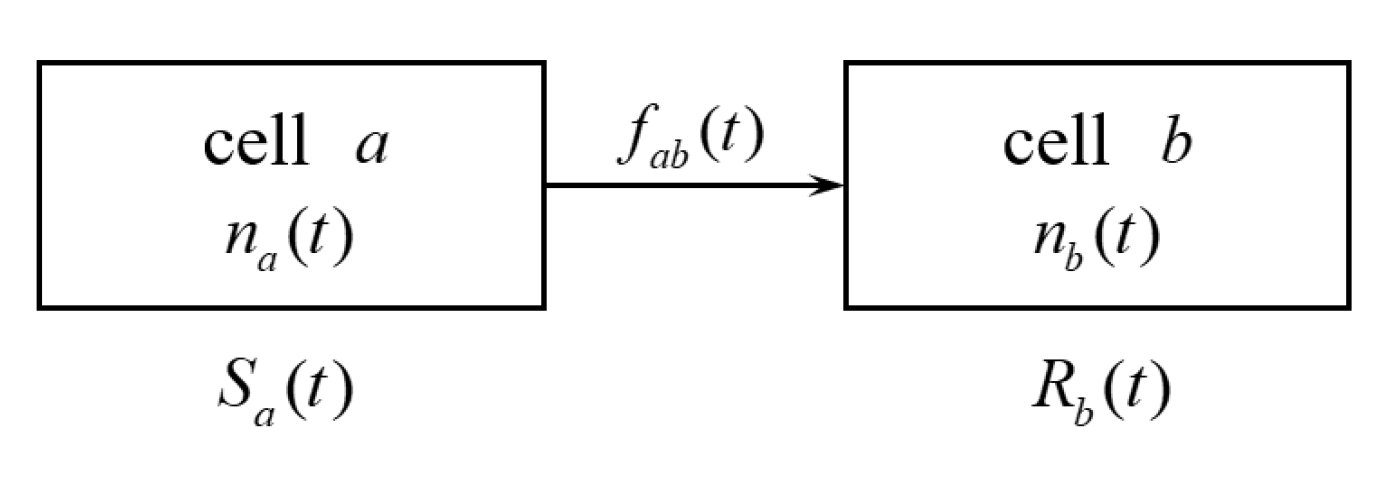
2.3.1. Cell Connection
- Normal cell
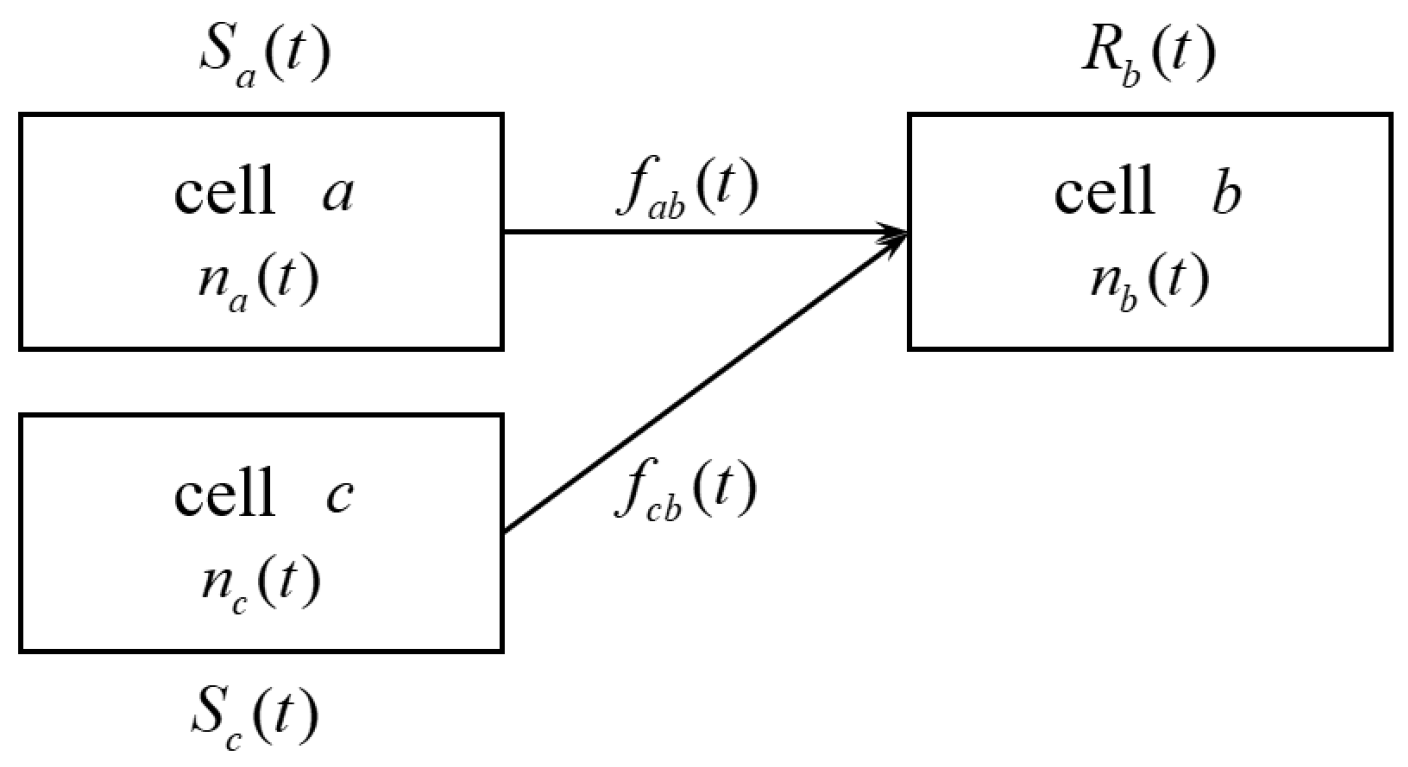
- Convergent cell
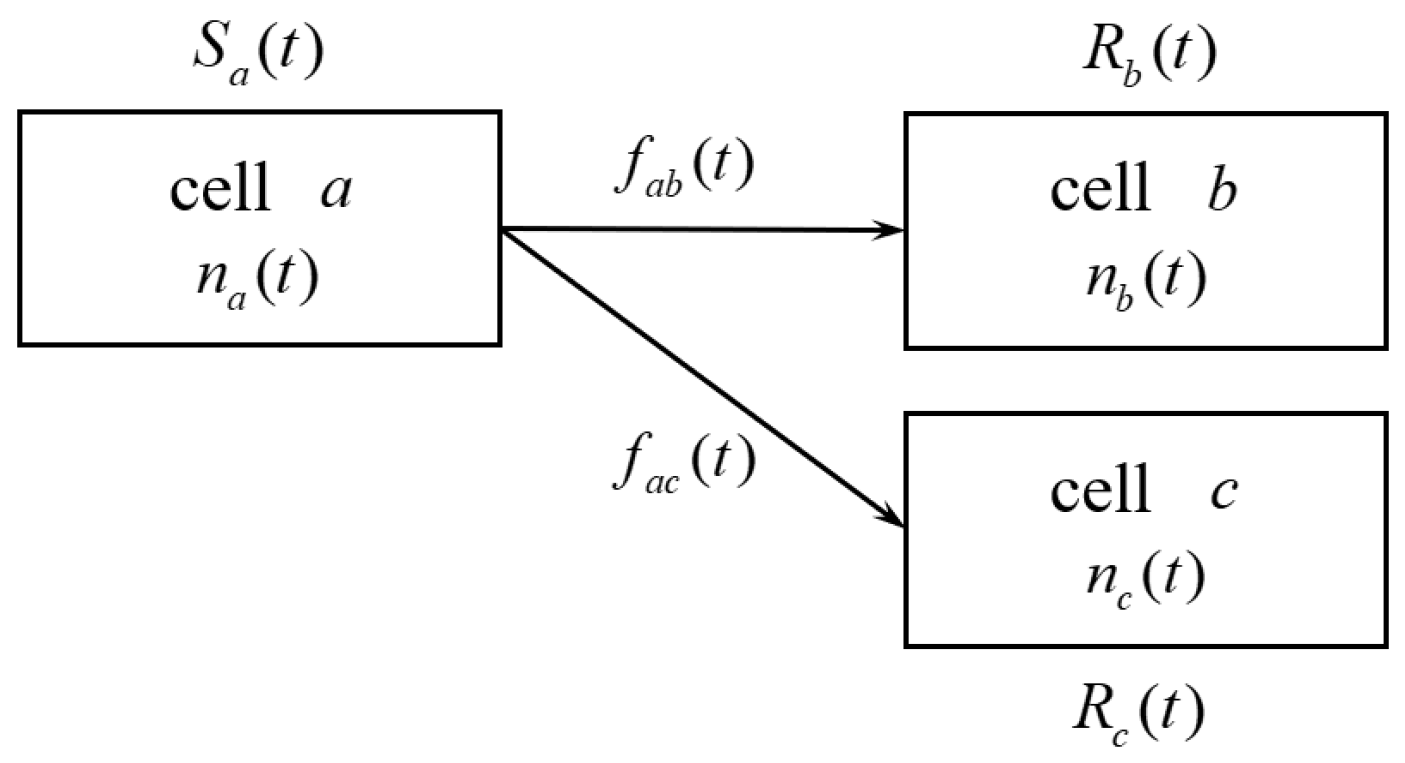
- Divergent cell
2.3.2. Dynamic Cell Transfer
3. Simulation Experiment Results
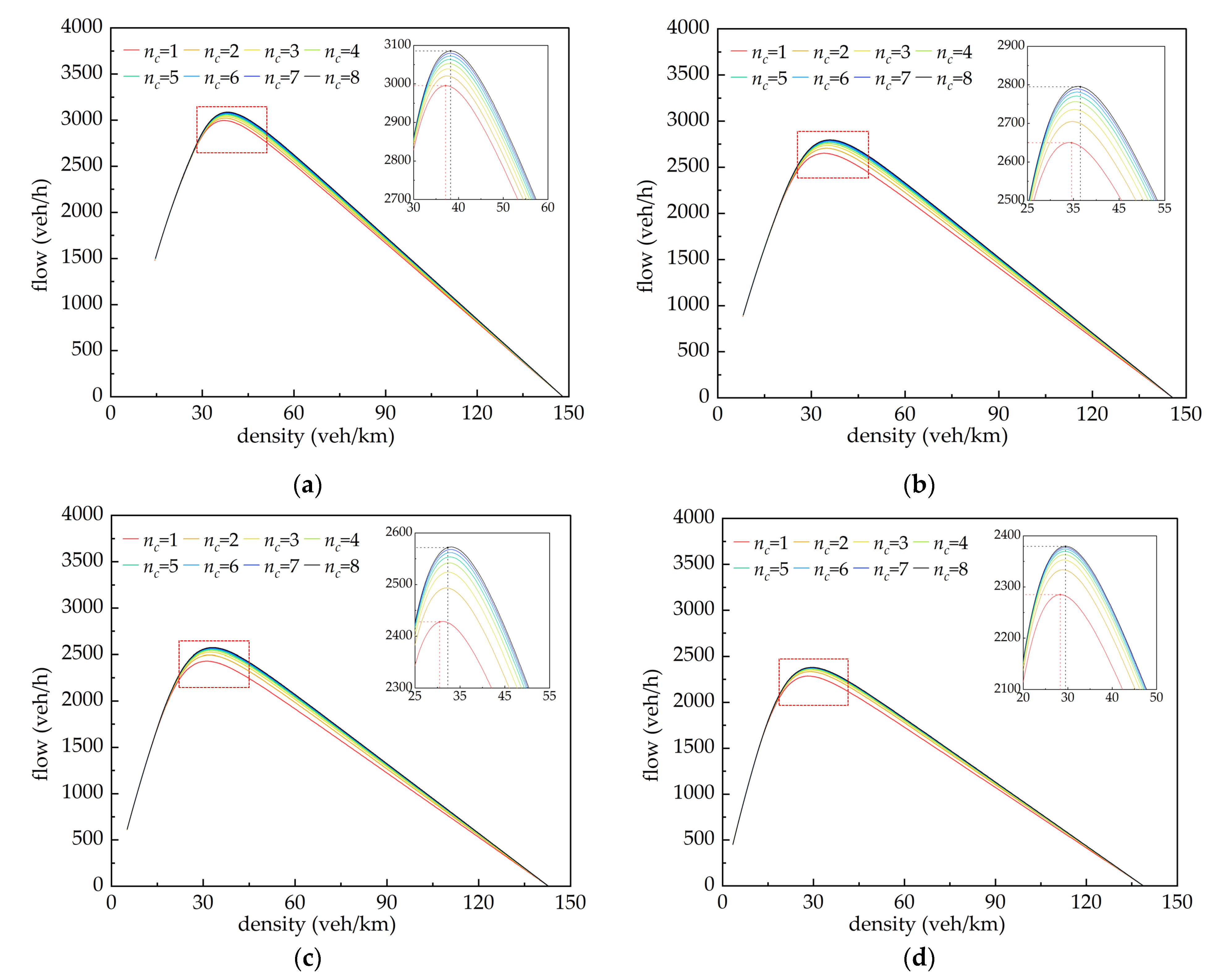
3.1. Mixed-Traffic Flow Fundamental Diagram Considering Fleet
3.2. Utility Function Calibration
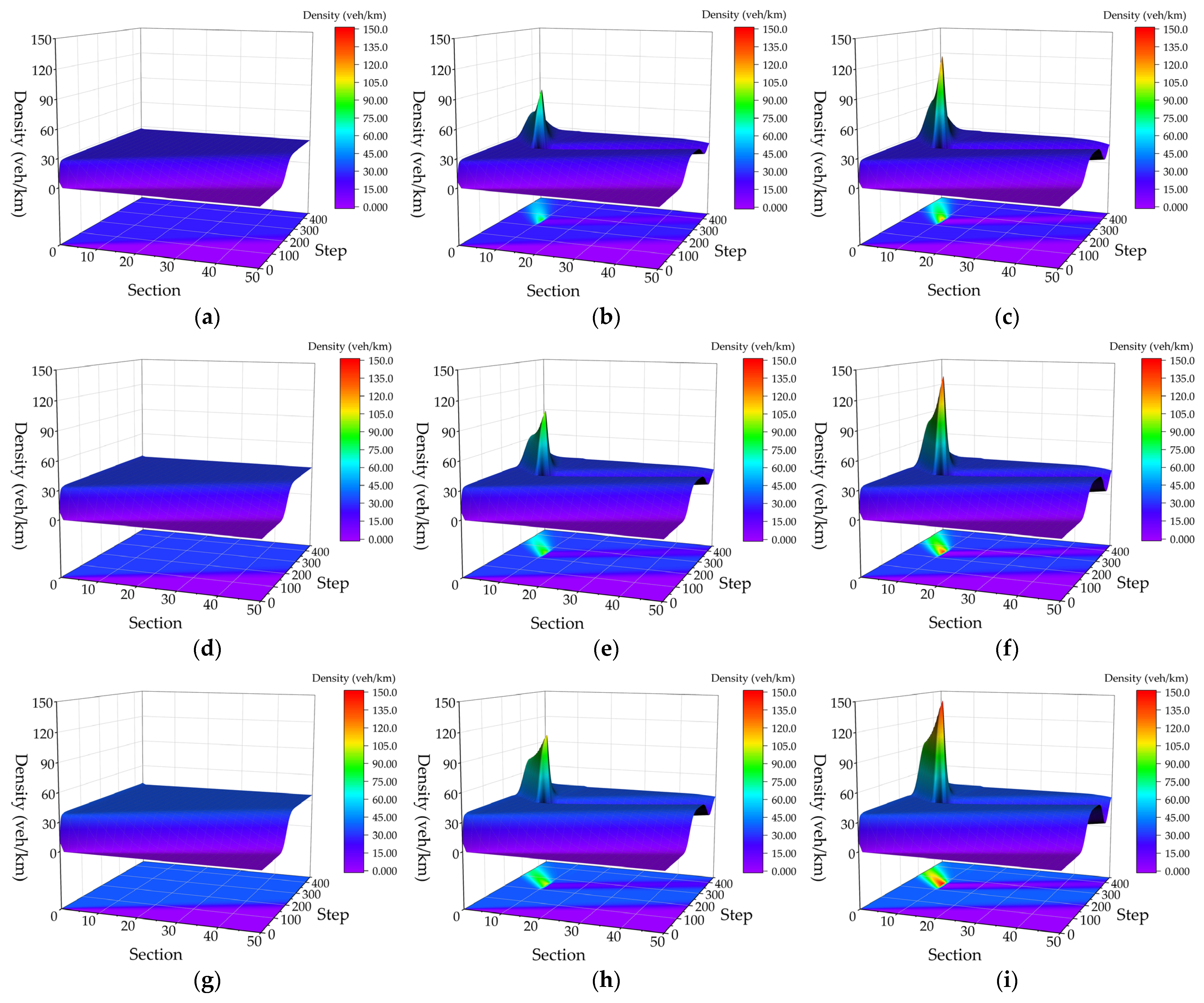
3.3. Dynamic Transmission Effect of Mixed-Traffic Flow
4. Conclusions and Discussion
- (1)
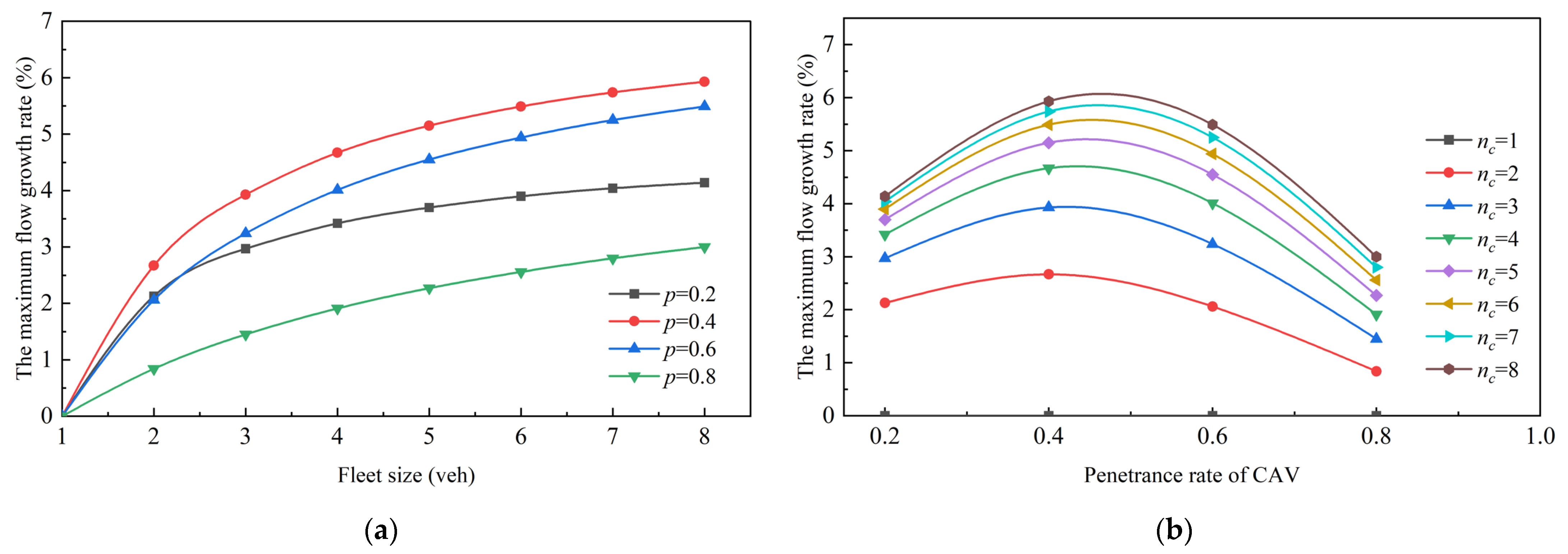
- With the increase of CAV penetrance rate and fleet size , the capacity of mixed-traffic flow can be effectively improved, as well as the critical density and maximum flow.
- (2)
- When CAV penetration rate and fleet size are within a certain range, the capacity can be improved more clearly. When , the maximum flow growth rate stays at a high level, and when fleet size is 6–8, the maximum flow growth rate is more than 2.5%.
- (3)
- Through analysis of simulation, it is verified that double lanes CTM established is in line with actual traffic flow change trend, proving effectiveness and feasibility of the model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAV | Connected and autonomous vehicle |
| AV | Autonomous vehicle |
| HV | Human driving vehicle |
| CACC | Cooperative adaptive cruise control |
| ACC | Adaptive cruise control |
| OV | Optimal velocity |
| GF | Generalized force |
| FVD | Full velocity difference |
| MVD | Multiple velocity difference |
| CA | Cellular automata |
| MITSIM | Microscopic traffic simulator |
| CTM | Cell transmission model |
| FIFO | First-in, first-out |
| V2V | Vehicle to vehicle |
| IDM | Intelligent Driver Model |
| Symbol | Meaning |
| Acceleration at moment of HV | |
| Speed at moment | |
| Difference between vehicle and the front at moment | |
| Distance headway between vehicle and the front at moment | |
| Speed of free traffic flow | |
| Minimum safety distance | |
| Expected maximum acceleration | |
| Expected deceleration | |
| Expected safe time headway | |
| Acceleration index | |
| Length of the vehicle | |
| Acceleration at moment of AV | |
| Control step | |
| of CAV | |
| Error between actual and expected spacing at moment | |
| with respect to | |
| Control coefficient | |
| Penetration rate of intelligent vehicles | |
| Fleet size of CAV | |
| Probability of CAV fleet | |
| Probability of AV | |
| Probability of HV | |
| Utility | |
| The set of all candidate options for travelers | |
| Fixed utility | |
| Unobservable random term | |
| Characteristic variable | |
| The number of vehicles in cell on current step | |
| Supply of cell on current step | |
| Demand of cell on current step | |
| Actual traffic flow from one cell to another on time step |
References
- Shladover, S.E.; Su, D.; Lu, X.Y. Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Milanes, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Kan, X.D.; Shladover, S.E.; Lu, X.Y.; Ferlis, R.E. Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities. Transp. Res. Part C Emerg. Technol. 2018, 95, 261–279. [Google Scholar] [CrossRef]
- Lesch, V.; Breitbach, M.; Segata, M.; Becker, C.; Kounev, S.; Krupitzer, C. An overview on approaches for coordination of platoons. IEEE Trans. Intell. Transp. Syst. 2022, 23, 10049–10065. [Google Scholar] [CrossRef]
- Guo, G.; Li, D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance. IEEE Trans. Veh. Technol. 2019, 68, 7511–7520. [Google Scholar] [CrossRef]
- Gong, S.; Du, L. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Davis, L.C. Dynamics of a long platoon of cooperative adaptive cruise control vehicles. Phys. A 2018, 503, 818–834. [Google Scholar] [CrossRef]
- Lee, W.J.; Kwag, S.I.; Ko, Y.D. The optimal eco-friendly platoon formation strategy for a heterogeneous fleet of vehicles. Transp. Res. Part D Transp. Environ. 2021, 90, 102664. [Google Scholar] [CrossRef]
- Zhao, W.; Ngoduy, D.; Shepherd, S.; Liu, R.; Papageorgiou, M. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection. Transp. Res. Part C Emerg. Technol. 2018, 95, 802–821. [Google Scholar] [CrossRef] [Green Version]
- Yao, Z.; Hu, R.; Wang, Y.; Jiang, Y.; Ran, B.; Chen, Y. Stability analysis and the fundamental diagram for mixed connected automated and human-driven vehicles. Phys. A 2019, 533, 121931. [Google Scholar] [CrossRef]
- Yao, Z.; Gu, Q.; Jiang, Y.; Ran, B. Fundamental diagram and stability of mixed traffic flow considering platoon size and intensity of connected automated vehicles. Phys. A 2022, 604, 127857. [Google Scholar] [CrossRef]
- Vranken, T.; Schreckenberg, M. Modelling multi-lane heterogeneous traffic flow with human-driven, automated, and communicating automated vehicles. Phys. A 2022, 589, 126629. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef]
- Helbing, D.; Tilch, B. Generalized force model of traffic dynamics. Phys. Rev. E 1998, 58, 133–138. [Google Scholar] [CrossRef] [Green Version]
- Peng, G.; Lu, W.; He, H. Nonlinear analysis of a new car-following model accounting for the global average optimal velocity difference. Mod. Phys. Lett. B 2016, 30, 1650327. [Google Scholar] [CrossRef]
- Li, X.; Qie, L.; Liu, Z.; Dong, Z.; Wei, S. Numerical simulation of car-following model considering multiple-velocity difference and changes with memory. In Proceedings of the 2021 2nd International Conference on Electronics, Communications and Information Technology (CECIT), Sanya, China, 27–29 December 2021; pp. 777–782. [Google Scholar]
- Wang, E.; Yang, T. Car following behavior analysis of different types of vehicles on ten lane expressway based on cellular automata. In Proceedings of the 2021 6th International Conference on Transportation Information and Safety (ICTIS), Wuhan, China, 22–24 October 2021; pp. 1576–1581. [Google Scholar]
- Gipps, P.G. A model for the structure of lane-changing decisions. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Yang, Q.; Koutsopoulos, H.N. A Microscopic Traffic Simulator for evaluation of dynamic traffic management systems. Transp. Res. Part C Emerg. Technol. 1996, 4, 113–129. [Google Scholar] [CrossRef]
- Balal, E.; Cheu, R.L.; Sarkodie-Gyan, T. A binary decision model for discretionary lane changing move based on fuzzy inference system. Transp. Res. Part C Emerg. Technol. 2016, 67, 47–61. [Google Scholar] [CrossRef]
- Peng, J.; Guo, Y.; Fu, R.; Yuan, W.; Wang, C. Multi-parameter prediction of drivers’ lane-changing behaviour with neural network model. Appl. Ergon. 2015, 50, 207–217. [Google Scholar] [CrossRef]
- Dou, Y.; Yan, F.; Feng, D. Lane changing prediction at highway lane drops using support vector machine and artificial neural network classifiers. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 901–906. [Google Scholar]
- Talebpour, A.; Mahmassani, H.S.; Hamdar, S.H. Modeling lane-changing behavior in a connected environment: A game theory approach. Transp. Res. Procedia 2015, 7, 420–440. [Google Scholar] [CrossRef] [Green Version]
- Hoogendoorn, R.; van Arerm, B.; Hoogendoom, S. Automated driving, traffic flow efficiency, and human factors: Literature review. Transp. Res. Rec. 2014, 2422, 113–120. [Google Scholar] [CrossRef]
- Ngoduy, D. Platoon-based macroscopic model for intelligent traffic flow. Transp. B Transp. Dyn. 2013, 1, 153–169. [Google Scholar] [CrossRef]
- Delis, A.I.; Nikolos, I.K.; Papageorgiou, M. Macroscopic traffic flow modeling with adaptive cruise control: Development and numerical solution. Comput. Math. Appl. 2015, 70, 1921–1947. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. A multiclass cell transmission model for shared human and autonomous vehicle roads. Transp. Res. Part C Emerg. Technol. 2016, 62, 103–116. [Google Scholar] [CrossRef] [Green Version]
- Tiaprasert, K.; Zhang, Y.; Aswakul, C. Closed-form multiclass cell transmission model enhanced with overtaking, lane-changing, and first-in first-out properties. Transp. Res. Part C Emerg. Technol. 2017, 85, 86–110. [Google Scholar] [CrossRef]
- Nagalur Subraveti, H.H.; Knoop, V.L.; van Arem, B. First order multi-lane traffic flow model—An incentive based macroscopic model to represent lane change dynamics. Transp. B Transp. Dyn. 2019, 7, 1758–1779. [Google Scholar] [CrossRef] [Green Version]
- Mahmassani, H.S. Autonomous vehicles and connected vehicle system: Flow and operations considerations. Transp. Sci. 2016, 50, 1140–1162. [Google Scholar] [CrossRef]
- Zong, F.; Wang, M.; Tang, M.; Li, X.; Zeng, M. An improved intelligent driver model considering the information of multiple front and rear vehicles. IEEE Access 2021, 9, 66241–66252. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, H.; Wang, W.; Wan, Q. Fundamental diagram model of heterogeneous traffic flow mixed with CACC vehicles and ACC vehicles. China J. Highw. 2017, 30, 127–136. [Google Scholar]
- Subirana, B.; Perez-Sanchis, M.; Sarma, S. Randomness in transportation utility models: The triangular distribution may be a better choice than the normal and gumbel. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Daganzo, C.F. The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory. Transp. Res. B Methodol. 1994, 28, 269–287. [Google Scholar] [CrossRef]
- Yu, H.; Diagne, M.L.; Zhang, L.; Krstić, M. Bilateral boundary control of moving shockwave in LWR model of congested traffic. IEEE Trans. Automat. Contr. 2019, 66, 1429–1436. [Google Scholar] [CrossRef]
- Pan, T.; Lam, W.H.K.; Sumalee, A.; Zhong, R. Multiclass multilane model for freeway traffic mixed with connected automated vehicles and regular human-piloted vehicles. Transp. A Transp. Sci. 2021, 17, 5–33. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | CAV Penetration Rate | ||
|---|---|---|---|---|
| veh/h | 2050 | 2572 | 3085 | |
| km/h | 75.95 | 79.63 | 82.65 | |
| km/h | 19.08 | 23.27 | 27.83 | |
| veh/km | 26.99 | 32.30 | 37.25 | |
| veh/km | 134.41 | 142.82 | 148.11 | |
| B | S.E. | Wals | df | Sig. | |
|---|---|---|---|---|---|
| 3.895 | 0.563 | 47.880 | 1 | 0.000 | |
| −4.287 | 0.544 | 62.062 | 1 | 0.000 | |
| −2.643 | 0.721 | 13.448 | 1 | 0.000 | |
| 3.279 | 0.919 | 12.729 | 1 | 0.000 | |
| Constant | 0.849 | 0.556 | 2.329 | 1 | 0.000 |
| B | S.E. | Wals | df | Sig. | |
|---|---|---|---|---|---|
| 1.034 | 0.474 | 4.753 | 1 | 0.029 | |
| −1.570 | 0.758 | 4.293 | 1 | 0.038 | |
| −2.752 | 0.686 | 16.102 | 1 | 0.000 | |
| 3.436 | 0.924 | 13.842 | 1 | 0.000 | |
| Constant | −1.039 | 0.759 | 1.877 | 1 | 0.000 |
| CL Has Been Predicted | Percentage Correction | |||
|---|---|---|---|---|
| 0 | 1 | |||
| CL has been predicted | 0 | 203 | 85 | 70.5 |
| 1 | 91 | 197 | 68.4 | |
| Percentage in total | 69.4 | |||
| CL Has Been Predicted | Percentage Correction | |||
|---|---|---|---|---|
| 0 | 1 | |||
| CL has been predicted | 0 | 165 | 123 | 57.3 |
| 1 | 107 | 181 | 62.8 | |
| Percentage in total | 60.1 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Ma, J.; Qiu, L.; Wang, X.; Lin, Z.; Luo, C.; Li, Y.; Fang, Y. The Double Lanes Cell Transmission Model of Mixed Traffic Flow in Urban Intelligent Network. Energies 2023, 16, 3108. https://doi.org/10.3390/en16073108
Tian W, Ma J, Qiu L, Wang X, Lin Z, Luo C, Li Y, Fang Y. The Double Lanes Cell Transmission Model of Mixed Traffic Flow in Urban Intelligent Network. Energies. 2023; 16(7):3108. https://doi.org/10.3390/en16073108
Chicago/Turabian StyleTian, Wenjing, Jien Ma, Lin Qiu, Xiang Wang, Zhenzhi Lin, Chao Luo, Yao Li, and Youtong Fang. 2023. "The Double Lanes Cell Transmission Model of Mixed Traffic Flow in Urban Intelligent Network" Energies 16, no. 7: 3108. https://doi.org/10.3390/en16073108