1. Introduction
In recent years, the growth of electric vehicles has been accelerated under the policy of global carbon reduction. In battery electric vehicles or other types of hybrid electric vehicles, the Li-ion battery is a core component operating as the power source or power transformer. For the battery-driven equipment, the operating effectiveness strongly relies on a reasonable battery quality. Battery quality could be evaluated by measuring the battery internal resistance or temperature. Practically, routine checking usually costs a lot of manpower, and regular maintenance is not suitable for the unexpected cases where failures occur suddenly. In contrast to preventive maintenance, predictive maintenance (PdM) aims to predict the health status of a piece of equipment according to the model built from the measured characteristics such as voltage, current, and temperature [
1,
2,
3]. Thus, the equipment operation can be real-time-monitored, and the demanded operations can be ensured. Predictive maintenance brings with it several advantages such as avoiding unexpected failures, reducing maintenance costs, and executing necessary module replacements more effectively. As the predictive maintenance of Li-ion batteries, the health status can be determined from the learning models so that the sudden failures can be avoided, and the batteries can be effectively operated in a well-defined condition.
Batteries have been used in various energy storage systems. The health management and degradation models of batteries have attracted a lot of attention. Lithium-ion batteries have characteristics such as high energy density, less self-discharge, and long cycle life [
4,
5,
6]. The battery performance degrades throughout its lifetime, which is known as battery aging. Battery aging is irreversible because of various reasons [
7], such as the influence of temperature [
8,
9,
10], the increase in internal resistance caused by chemical reactions [
11], the battery charging current [
12,
13], and the series- or parallel-connection of batteries [
14]. Due to the characteristics of long lifetime, high density, and light weight, lithium-ion batteries are preferred over other battery technologies in various applications, including electric vehicles, satellites, laptops, and other consumer electronics.
In recent years, the state of health (SOH) and remaining useful life (RUL) have raised many concerns in the study of battery quality [
15]. Both SOH and RUL are important indicators to reflect battery health. Typical methods for the evaluation of battery status include the direct measurement method, physical model method, and data analysis method. In direct measurement methods, an open-circuit voltage is applied to calculate the battery capacity [
16], and the battery impedance can be measured by electrochemical impedance spectroscopy [
17]. Alternatively, in the physical model methods, the battery degradation behaviors are described by an equivalent model developed from the electrochemical mechanism or equivalent circuit [
18,
19,
20]. In [
21,
22,
23], machine learning methods were adopted to train the SOH model through the history data of batteries. Because of the progressive development of machine learning technologies, data analysis approaches have become the main research trends of battery health analyses.
Over the past several years, traditional maintenance strategies of inspection, testing, repair, and replacement have been applied to ensure equipment are in good condition with high availability and service life [
24,
25,
26]. Basically, the maintenance will not be activated unless a fault occurs. This seeing-is-believing policy could result in significant costs in manpower, time, or money in fault recovery. To improve maintenance effectiveness, the maintenance strategy has gradually changed to the so-called prevention maintenance. For example, a time-based maintenance is in accordance with a pre-defined time routine [
27]. However, the maintenance periods are usually varied subject to the working conditions in different devices. In another way, a condition-based maintenance was proposed, where certain thresholds are set for the addressed equipment modules [
28]. However, the pre-determined thresholds could be conservative and may involve taking a risk in failure prevention [
29]. Condition-based maintenance seems to improve the maintenance performance in a certain degree compared with the time-based maintenance. However, there still exists suspicion in the aspect of failure detection in time. With the popularization of monitoring equipment, predictive maintenance becomes more feasible [
30]. In [
31], a sliding window algorithm was developed to predict the remaining service life of the battery, and the results showed that the error was within 1.5% and the root-mean-square error in predictive replacement can be made in advance within 20 cycles. In [
32], a predictive maintenance strategy was proposed for transformers to attain low cost and high reliability. According to the factors of life reduction and fault increase, a failure rate evolution model was proposed. Predictive maintenance aims to effectively predict equipment failures, prevent problems, save unnecessary maintenance costs, and hope to achieve better results than traditional preventive maintenance strategies.
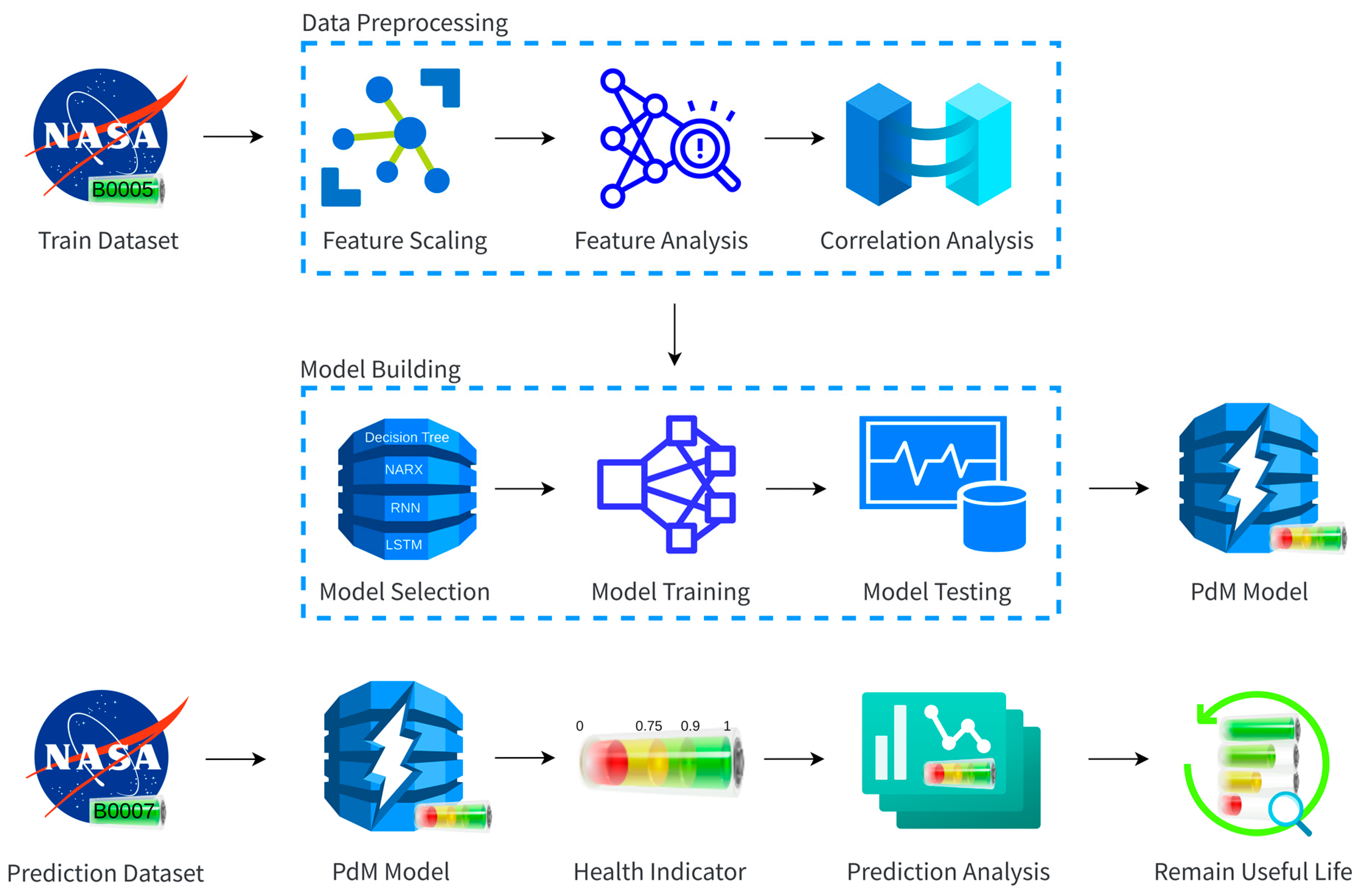
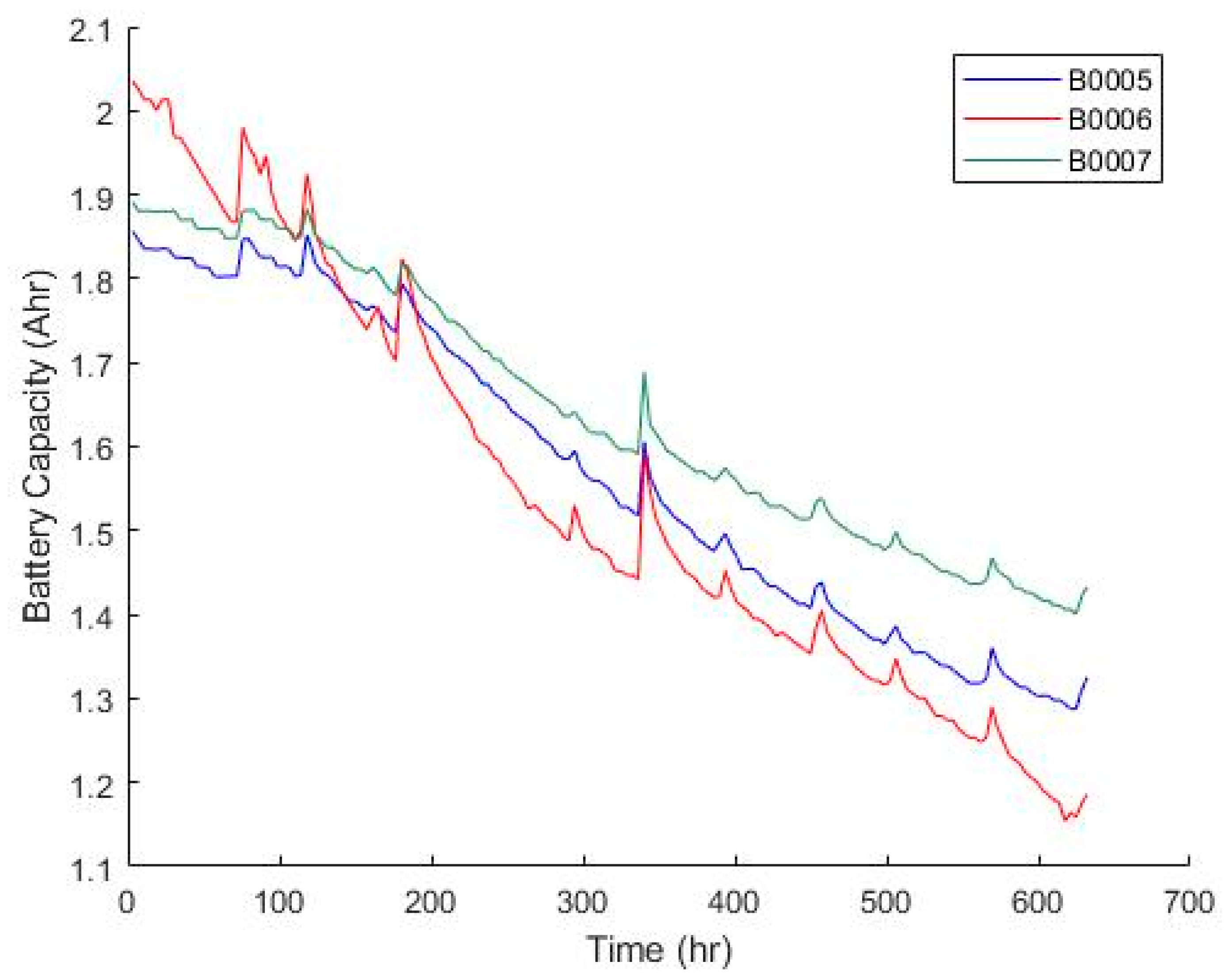
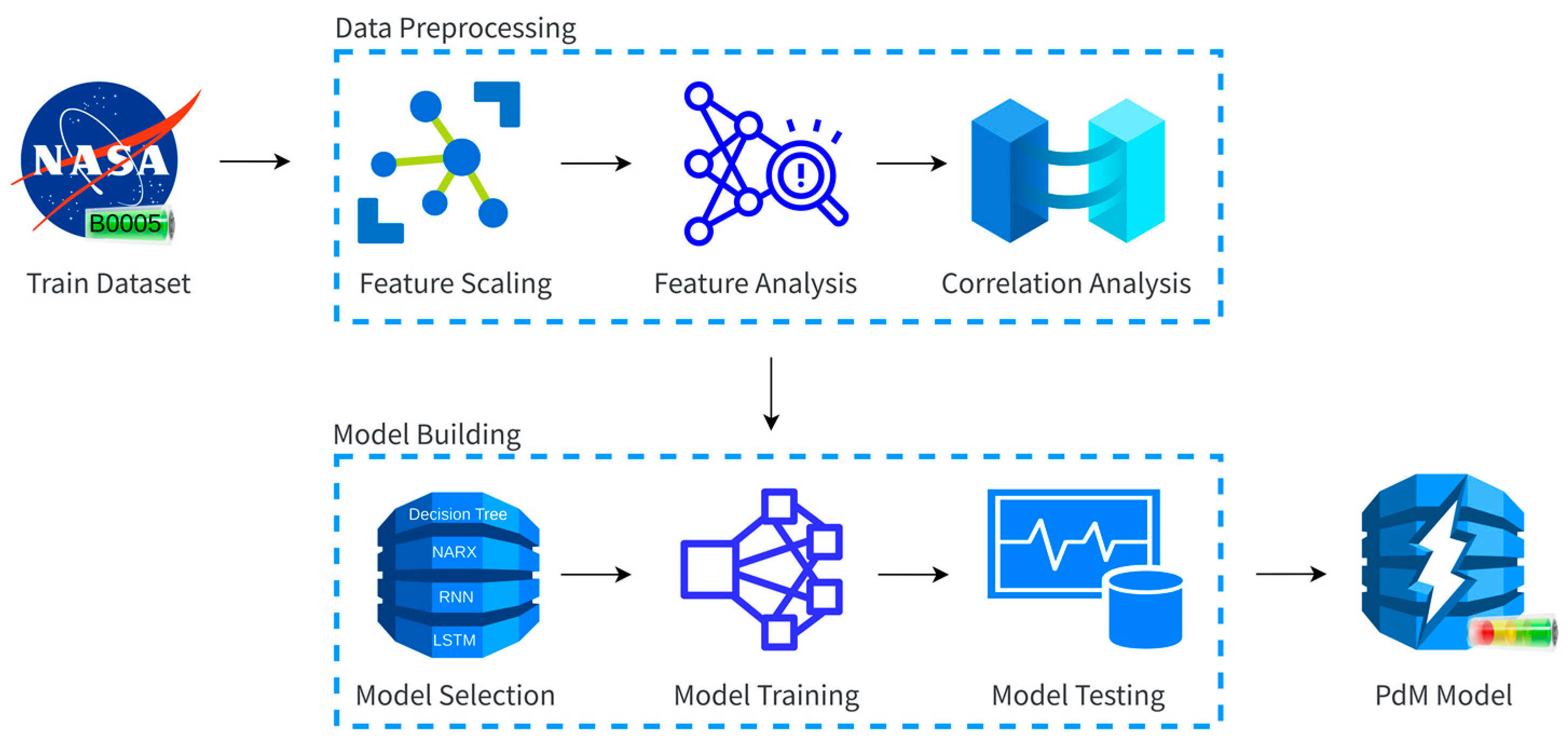
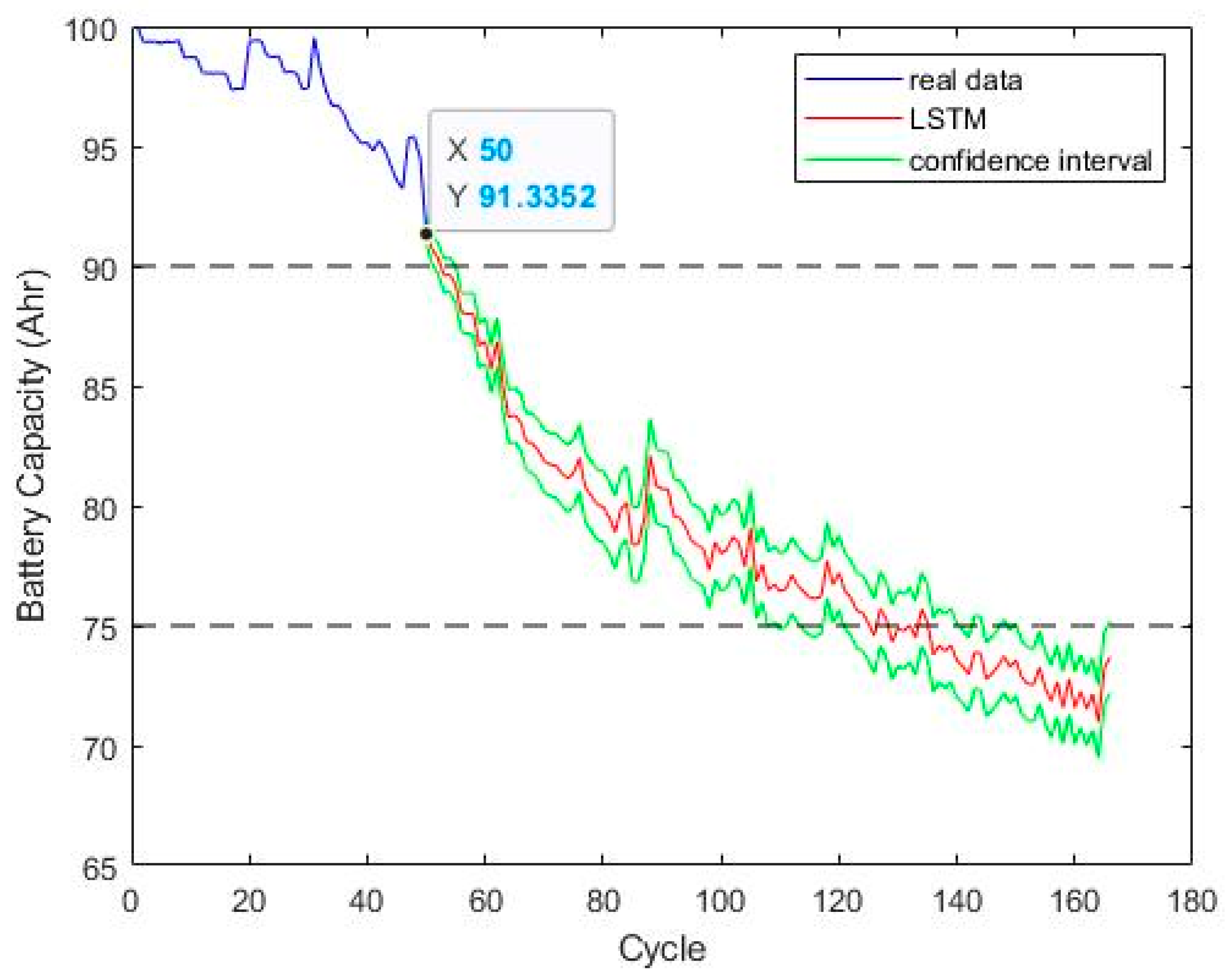
In this paper, the health status of Li-ion batteries is analyzed such that the remaining useful life can be determined in accordance with the learning models. The learning models are generated according to the operating conditions and measured parameters. To build the learning models, the battery features during the charging and discharging processes must be identified. Moreover, the selection of crucial features is performed by using the correlation analysis. Thus, the computation complexity of the model building can be reduced. Finally, the remaining useful life of Li-ion batteries can be predicted. In this paper, the NASA battery dataset is adopted as the real measurements. From the analysis results, the predicted RUL of Li-ion batteries is basically consistent with the trend of the real data. The whole analysis procedures, including the feature selection, correlation analysis, model building, and prediction analysis, addressed in this paper could be helpful for the predictive maintenance of Li-ion batteries in practical cases.
6. Conclusions
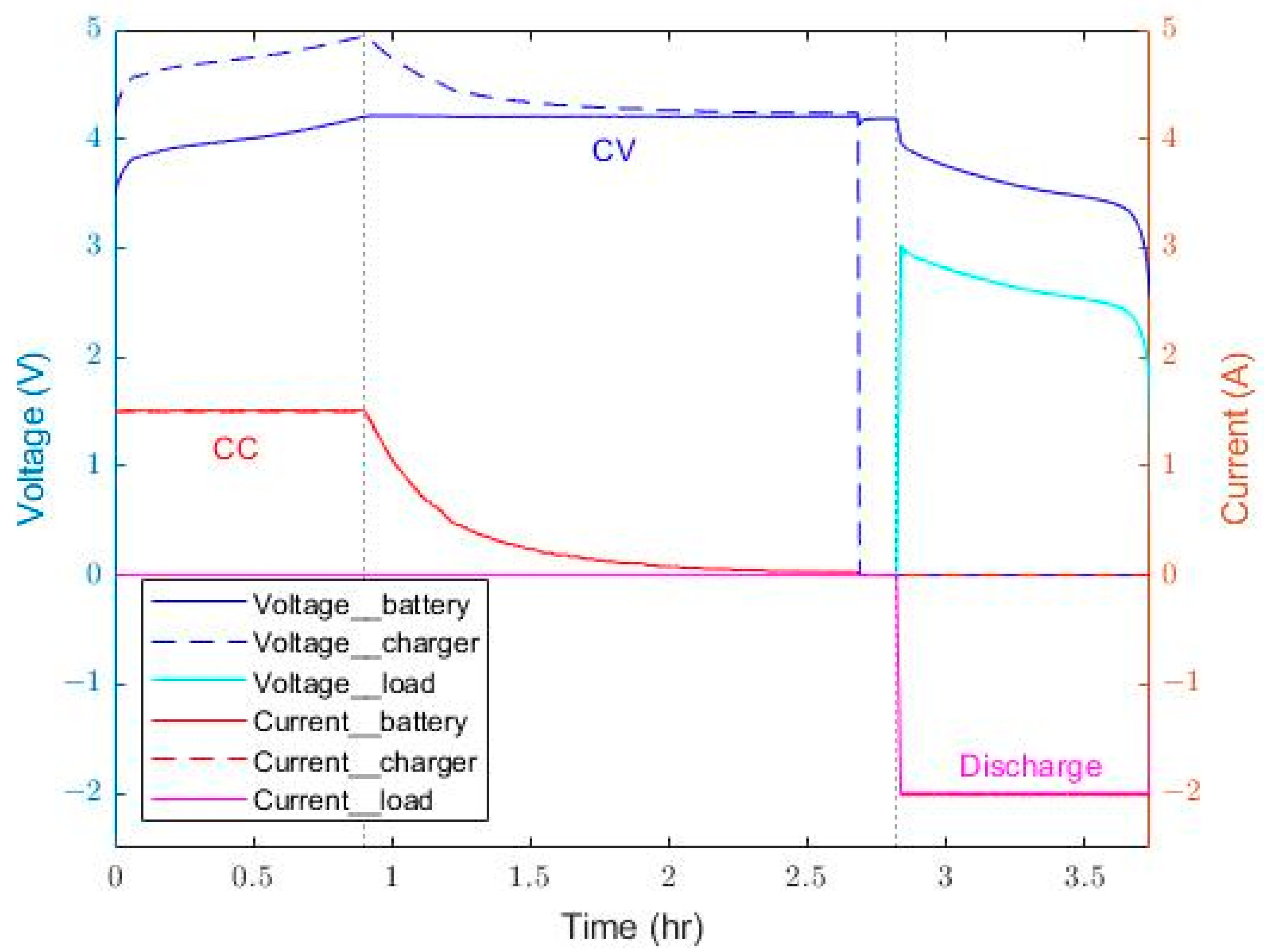
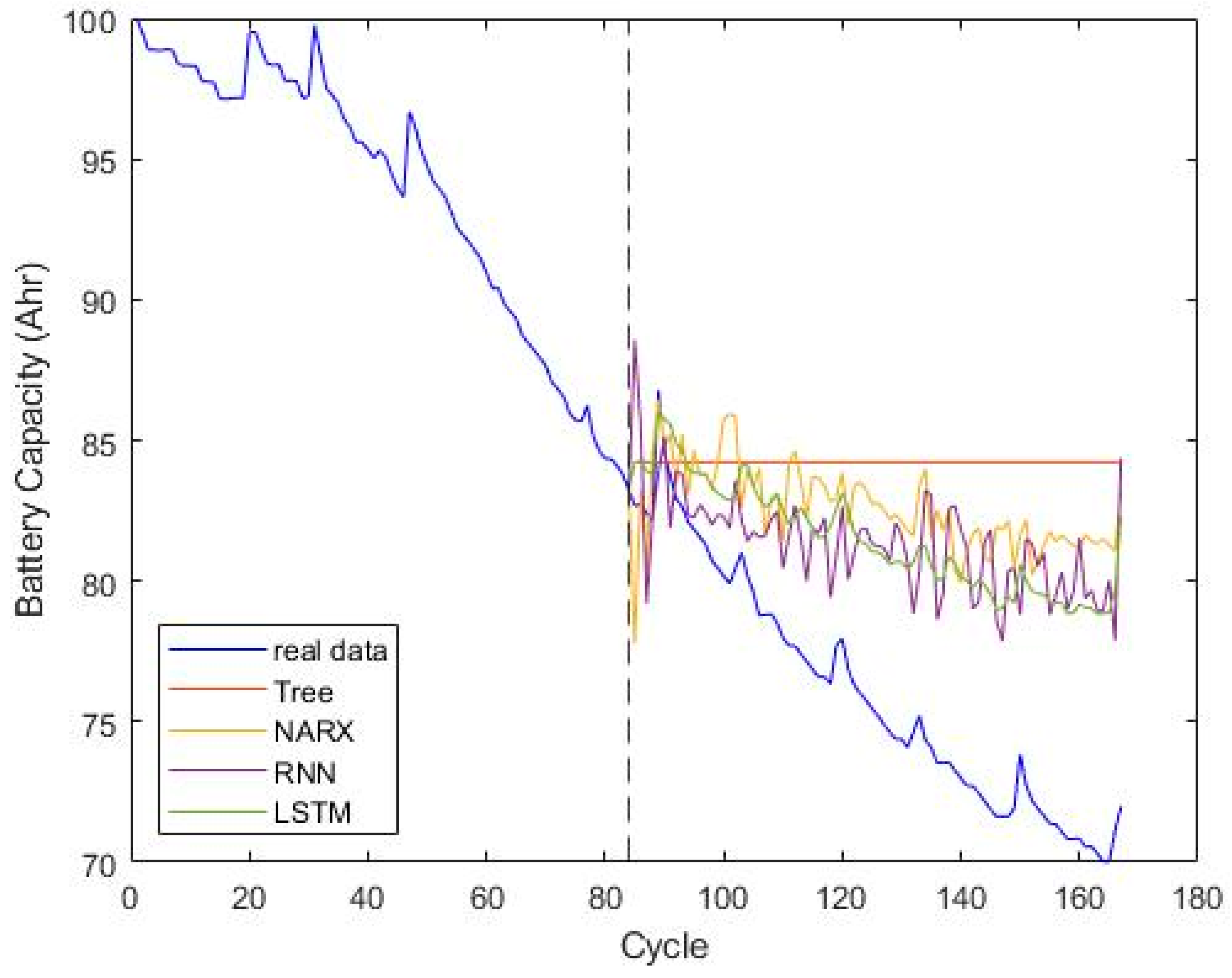
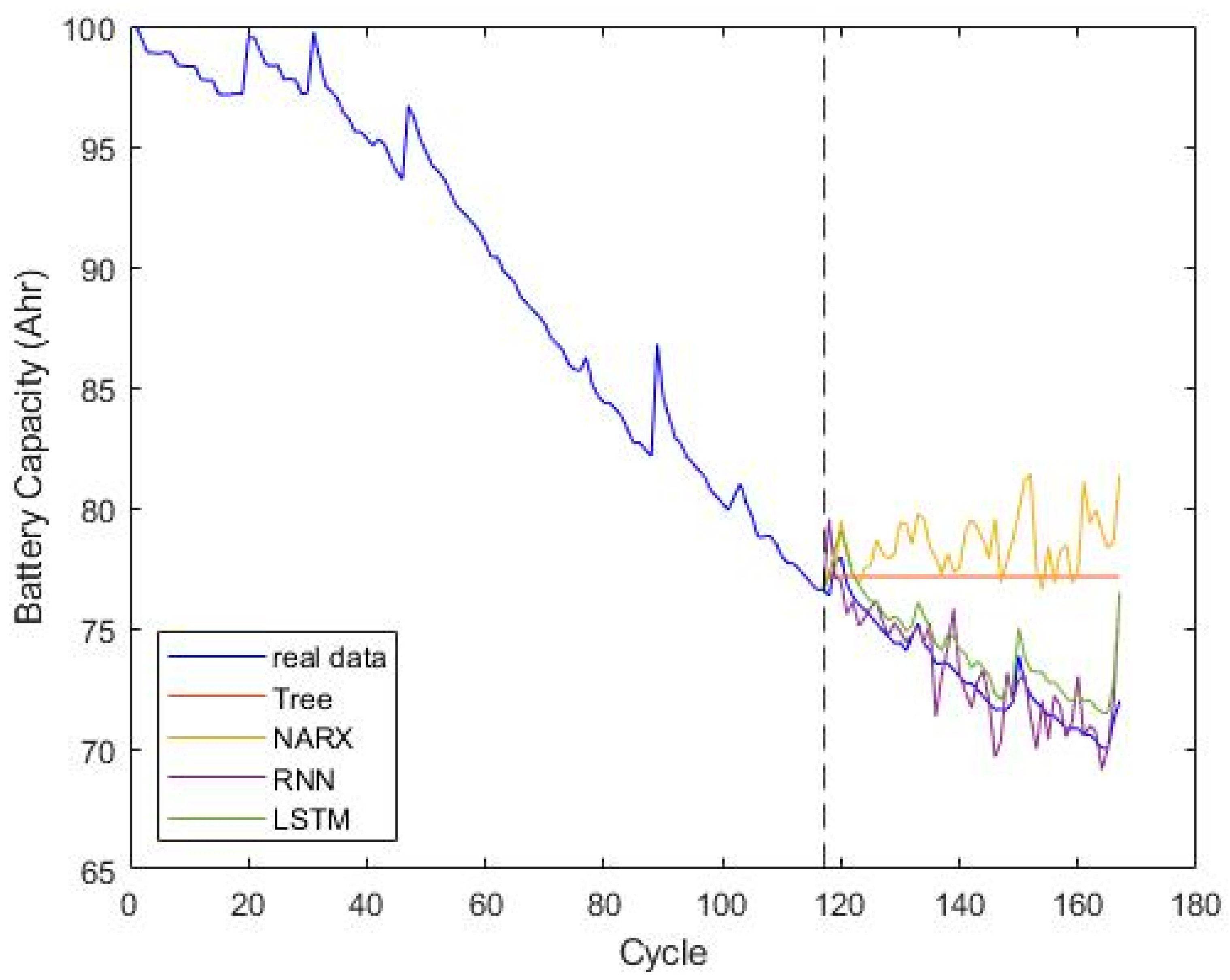
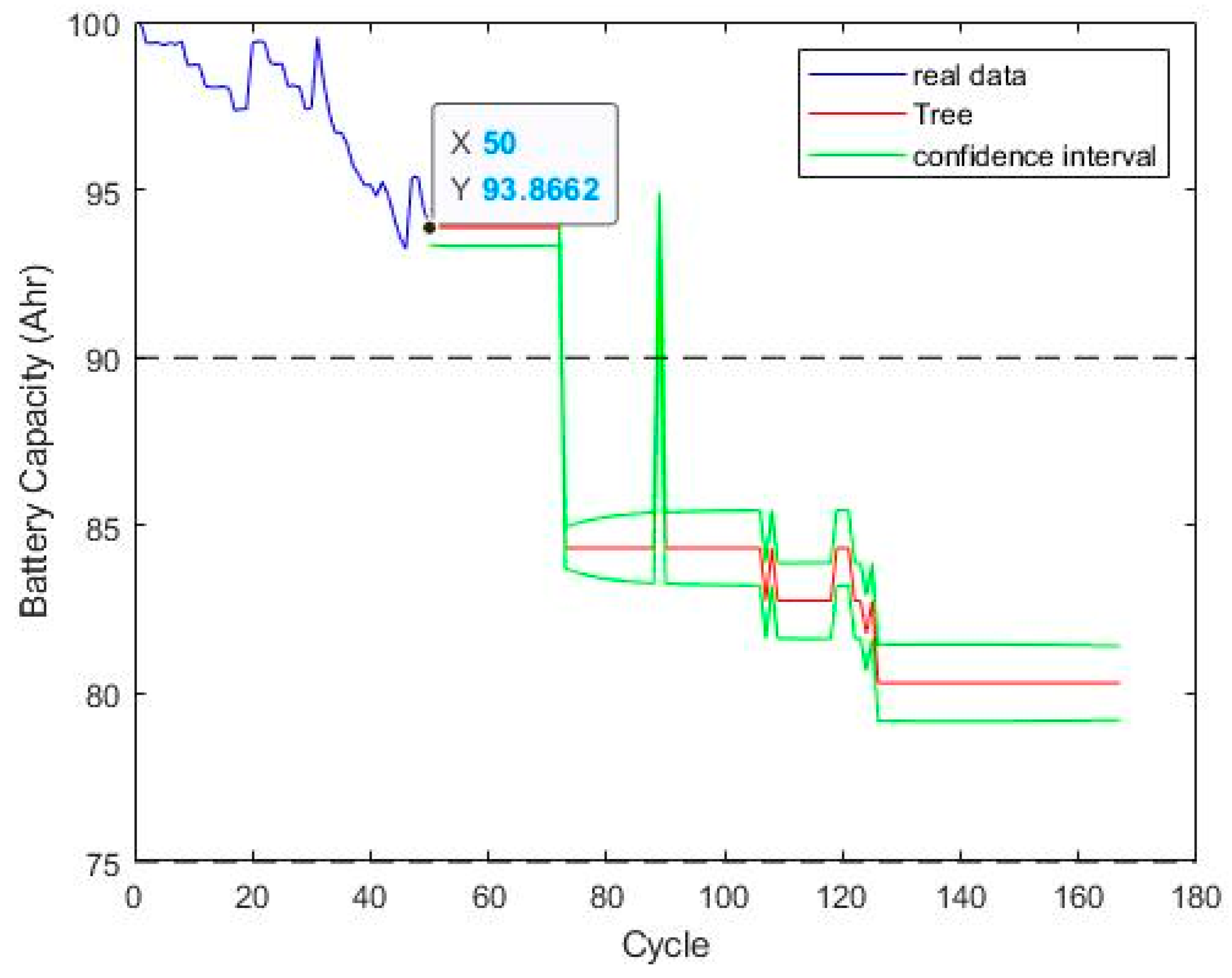
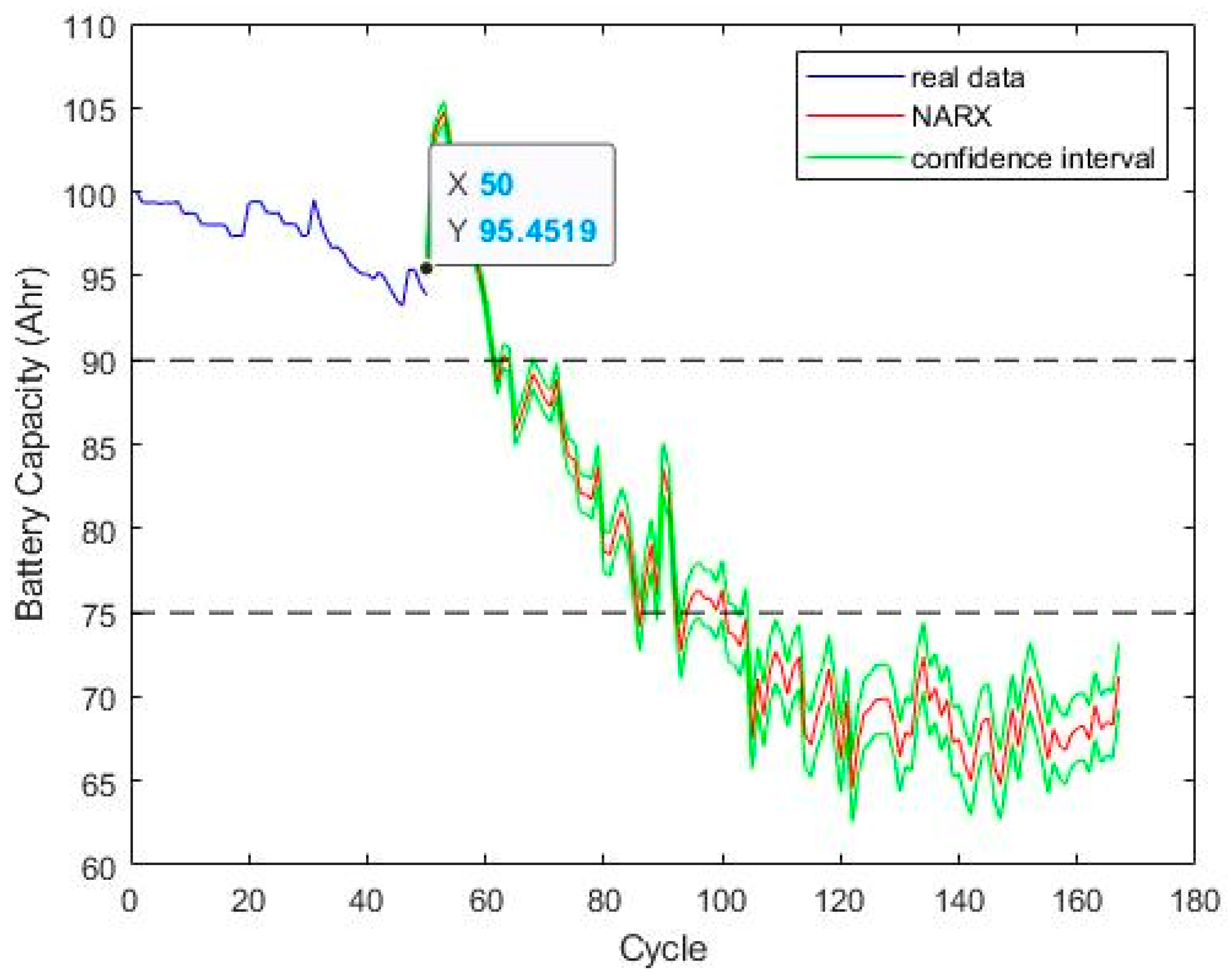
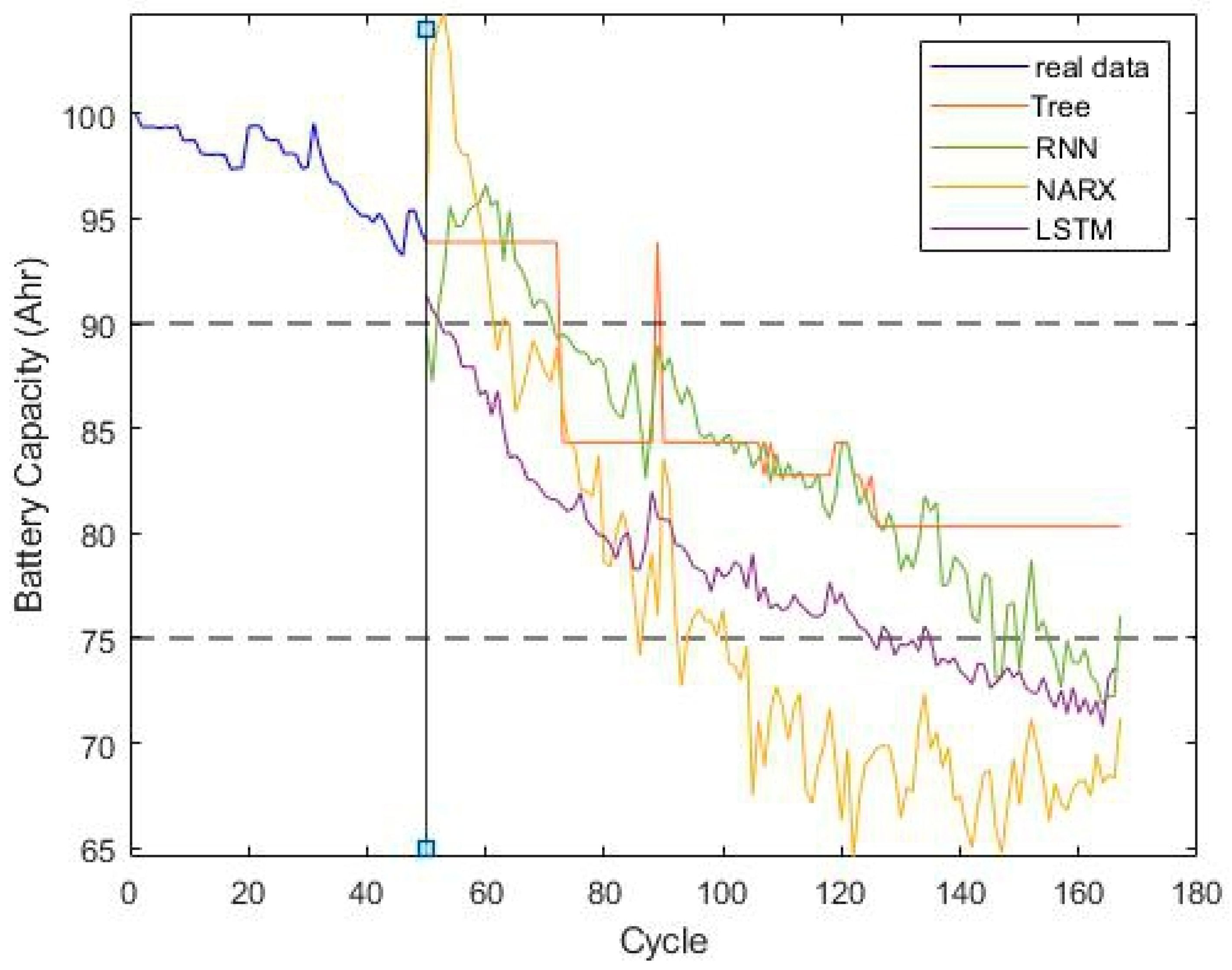
This paper introduces the essential characteristics of lithium-ion batteries and the charging and power measurement methods. In this study, MATLAB is used to design an analysis process to predict the remaining useful life of Li-ion batteries according to NASA’s Li-ion battery aging datasets. The main steps of data processing include data preprocessing, feature extraction, and finding dominant features through correlation analysis. In addition, model training and testing are carried out according to the selected model, and then health indicators and the remaining useful life are generated. During the analysis process, it can be found that the model produced by less data has a large difference between the predicted and actual ones. As the amount of training data increases, the variations in the predicted trends will gradually converge, and the confidence of results will also increase. From the final prediction results, it is known that if the model has a lower loss function, the corresponding remaining life prediction accuracy is higher. After comparative analysis, among the four selected models, the long short-term memory network model has the best prediction effect. The long short-term memory network has the advantage of sharing the characteristics of the recurrent neural network, and adds mechanisms such as the forgetting gate, input gate, and output gate to the hidden layer to discard and update the state to solve the problem of long-term dependence of the recurrent neural network. In this study, the software is successfully used to complete the remaining useful life of Li-ion batteries. In the future, the process developed in this study can be extended to various applications in predictive maintenance.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}