

Analysis of DFIG Interval Oscillation Based on Second-Order Sliding Film Damping Control
Abstract
:1. Introduction
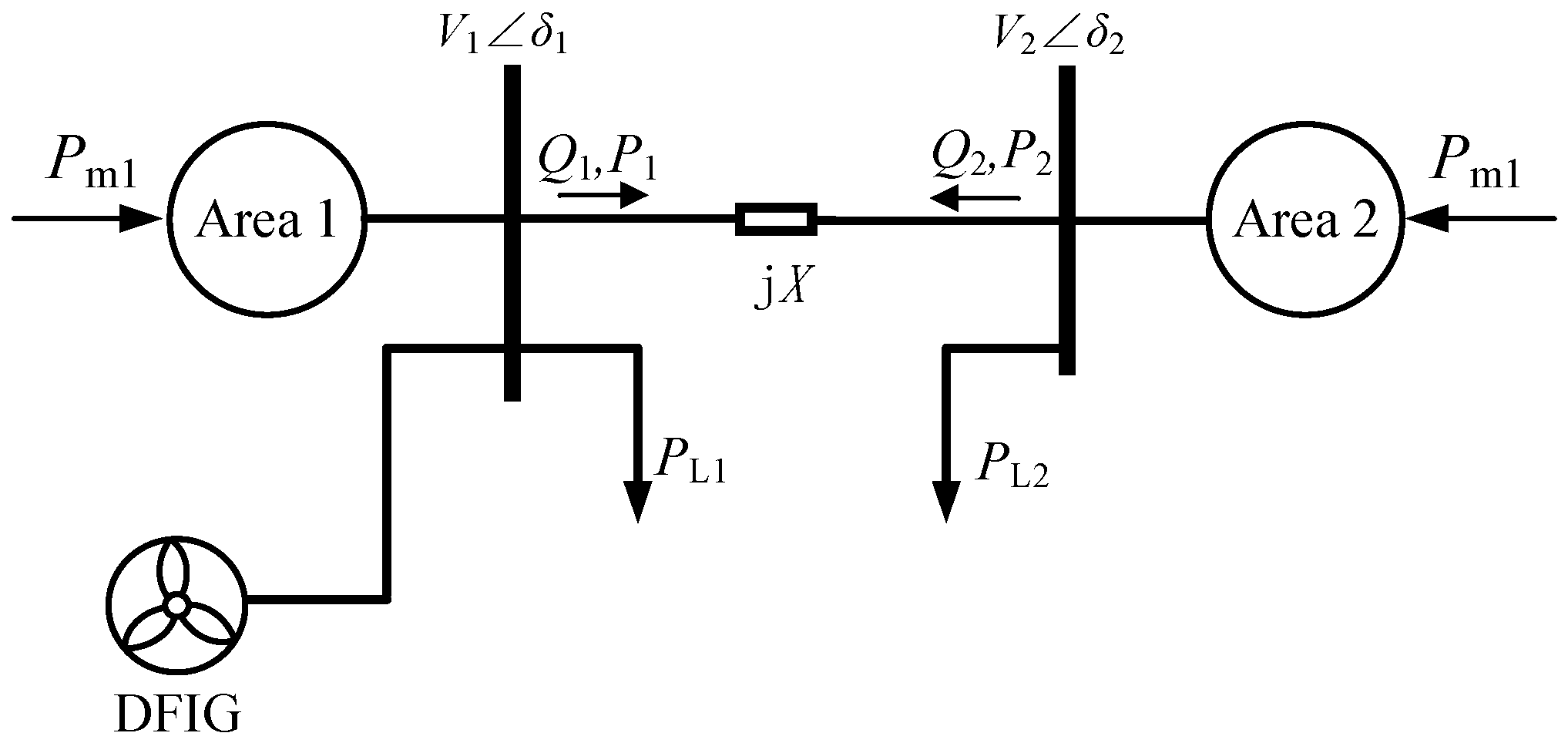
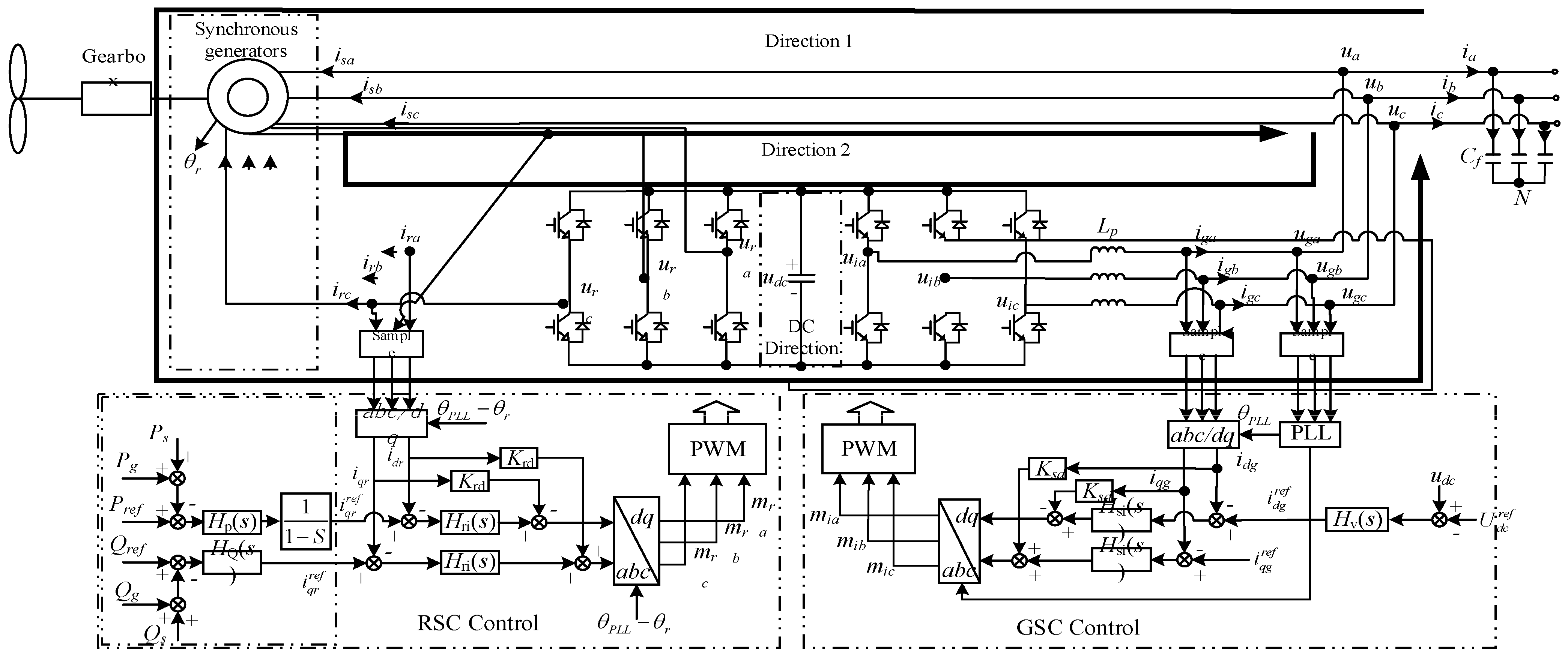
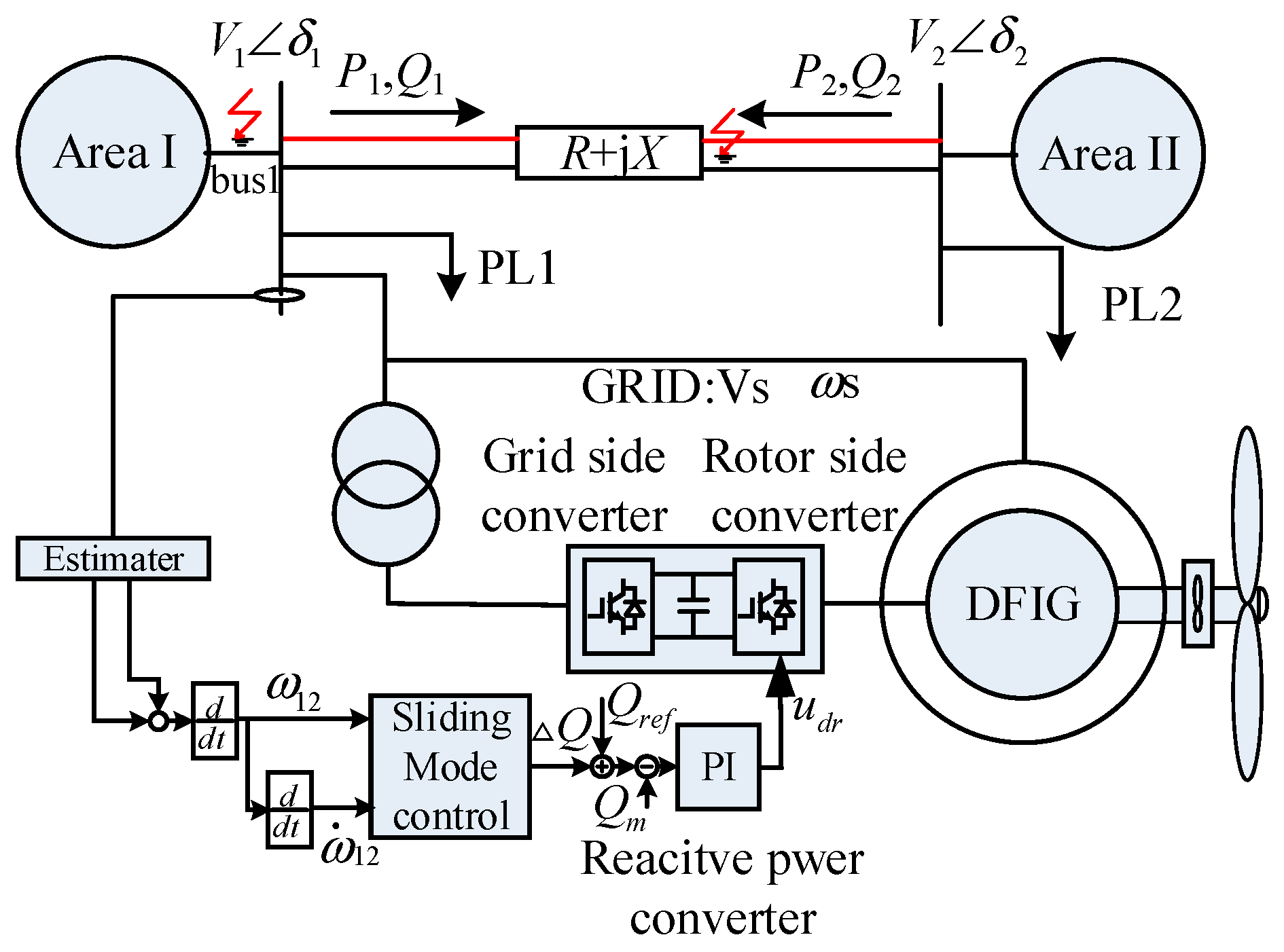
2. System Dynamic Modeling
3. Controller Design
3.1. Selecting Variables
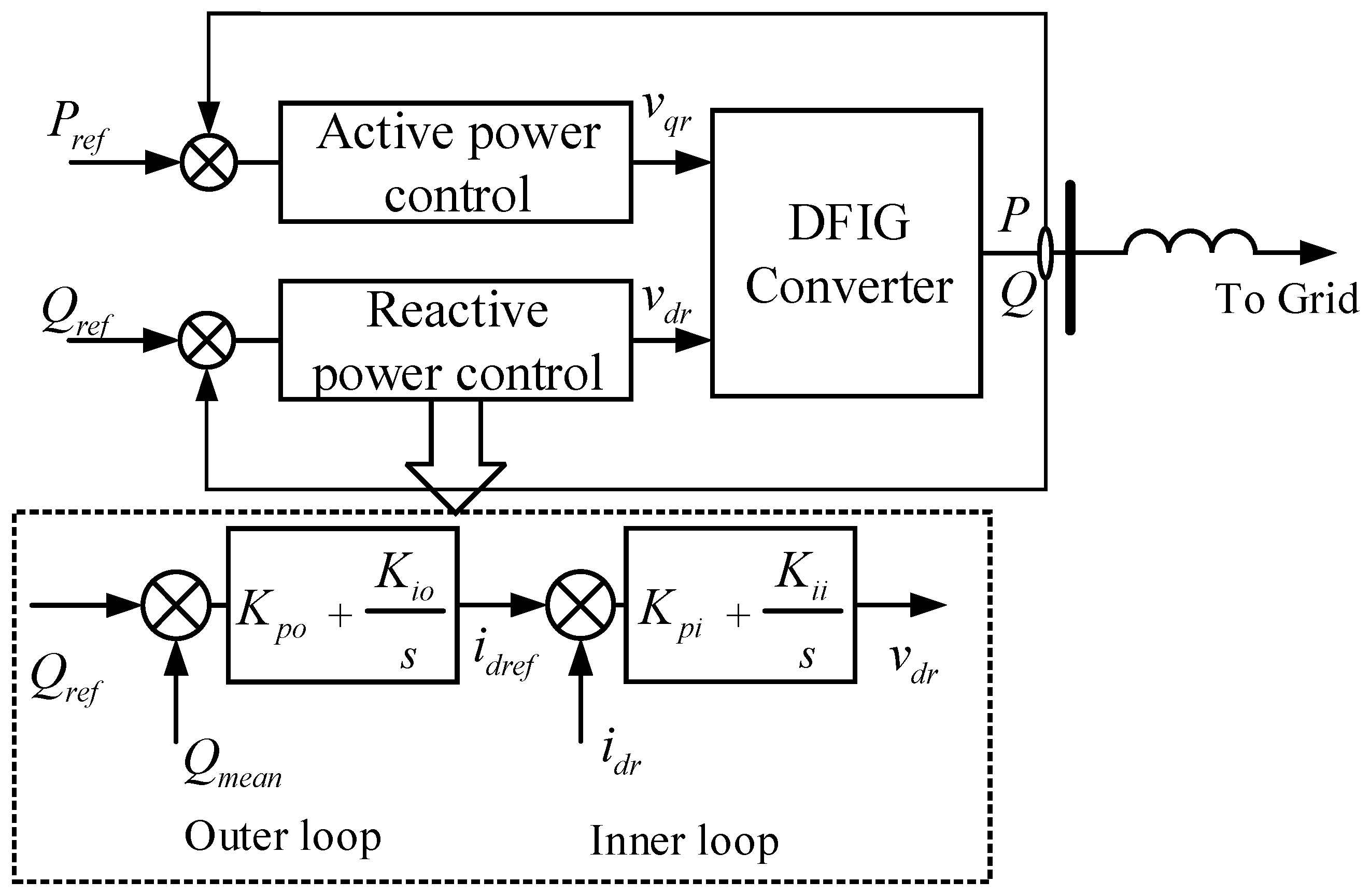
3.2. Damping Controller Design
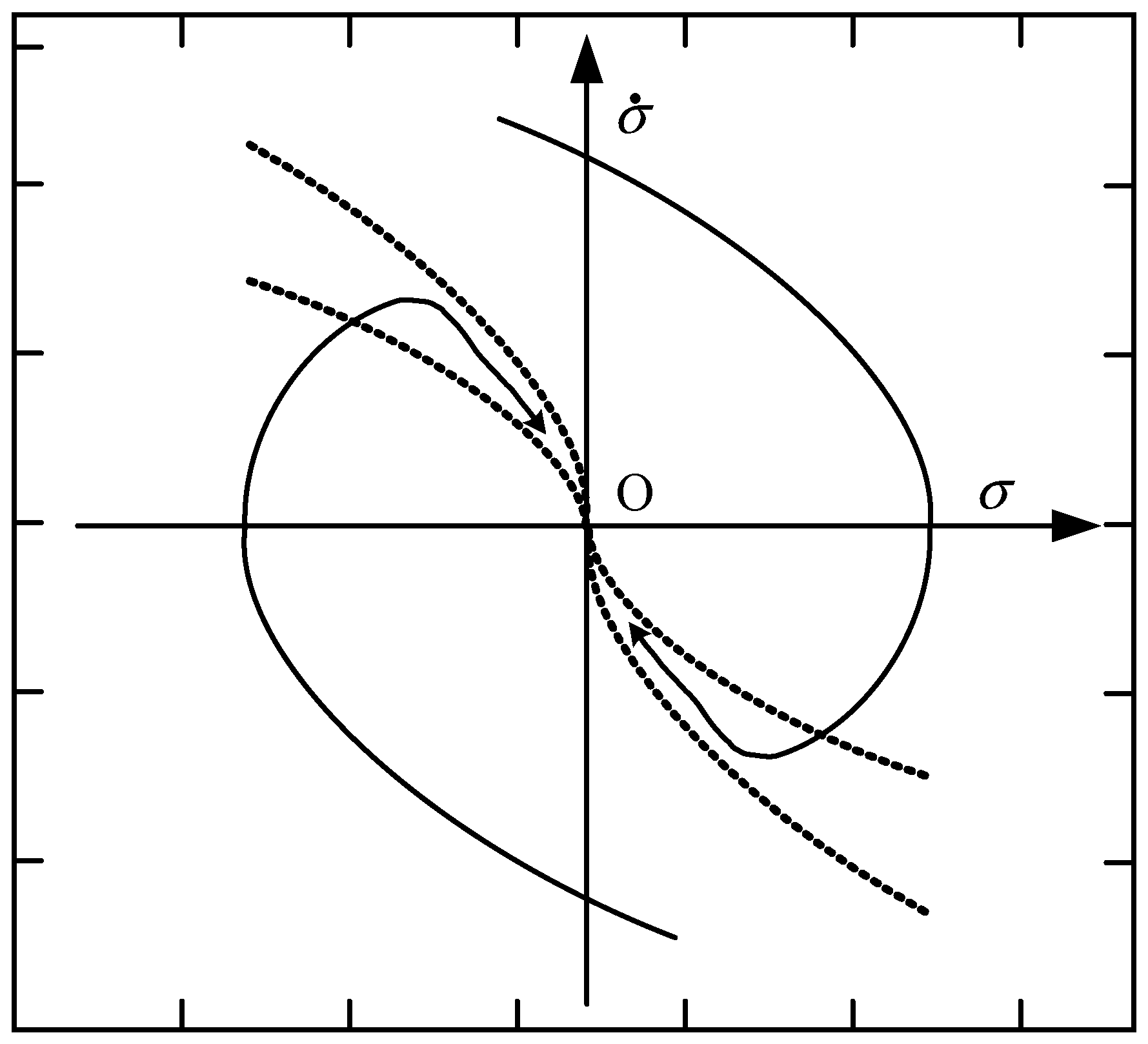
4. Stability Derivation for Second-Order Sliding-Mode Controllers
4.1. Figures, Tables and Schemes
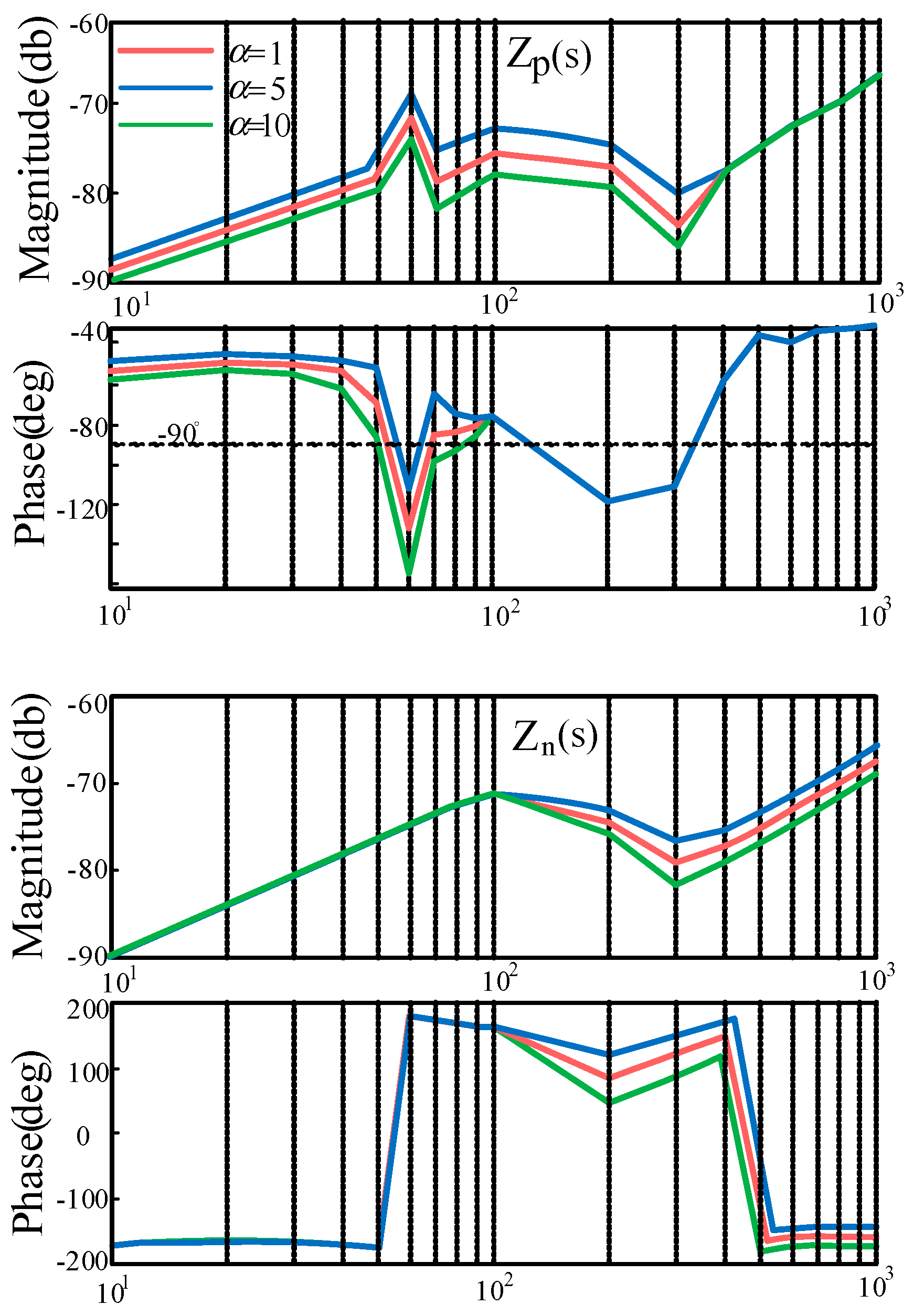
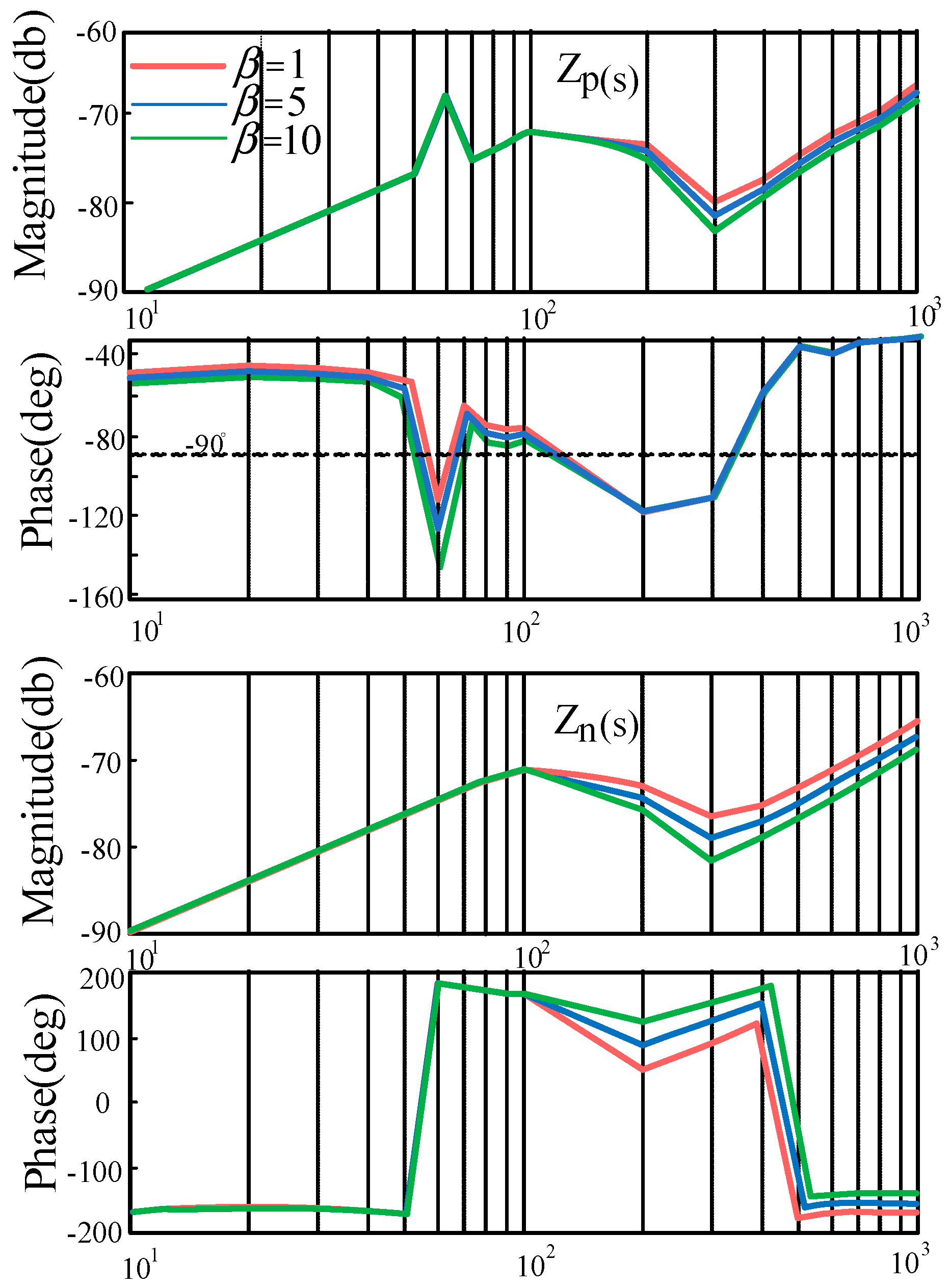
4.2. Frequency Domain Analysis of DFIG
4.3. Asynchronous Induction Generator Impedance Modeling
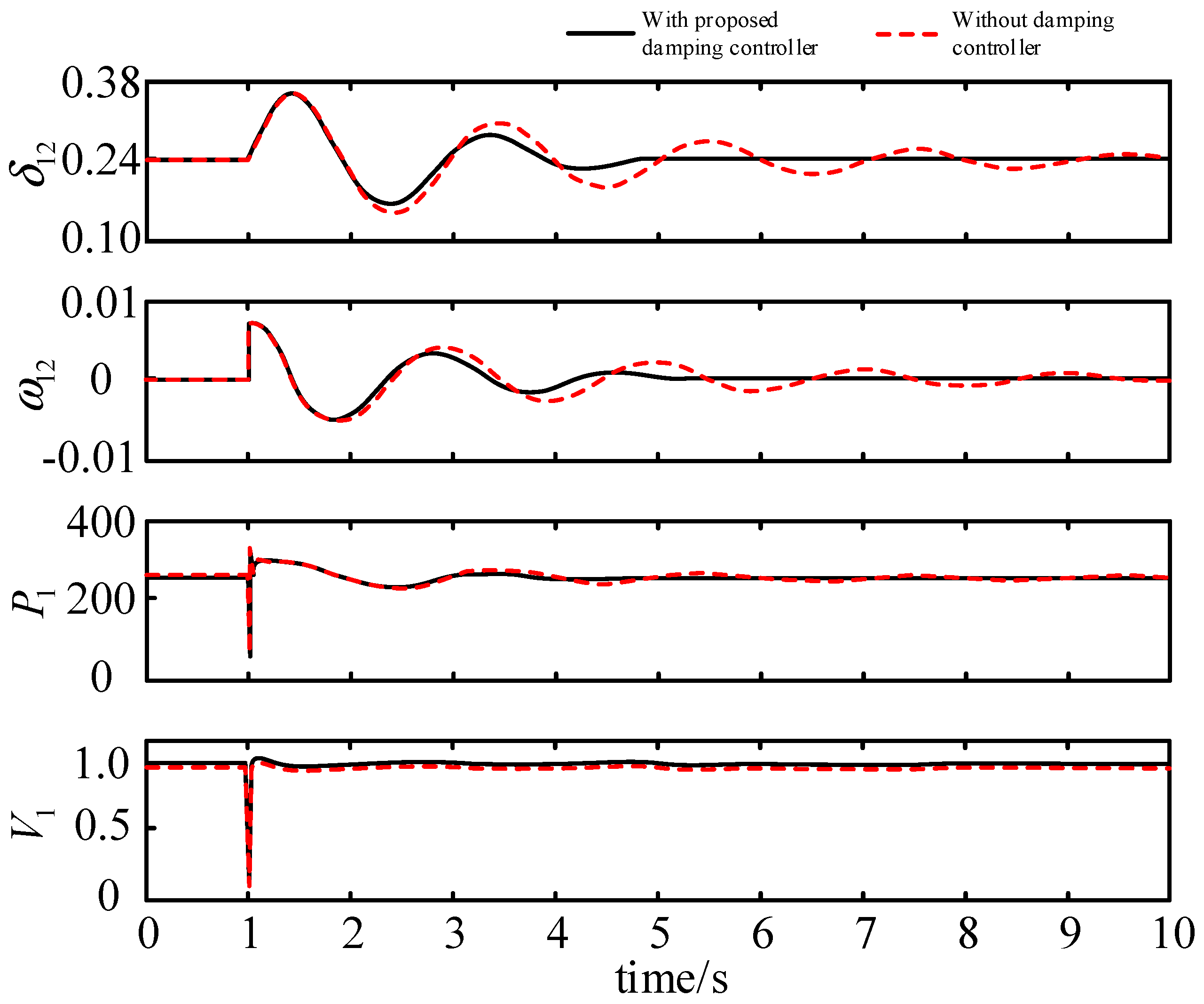
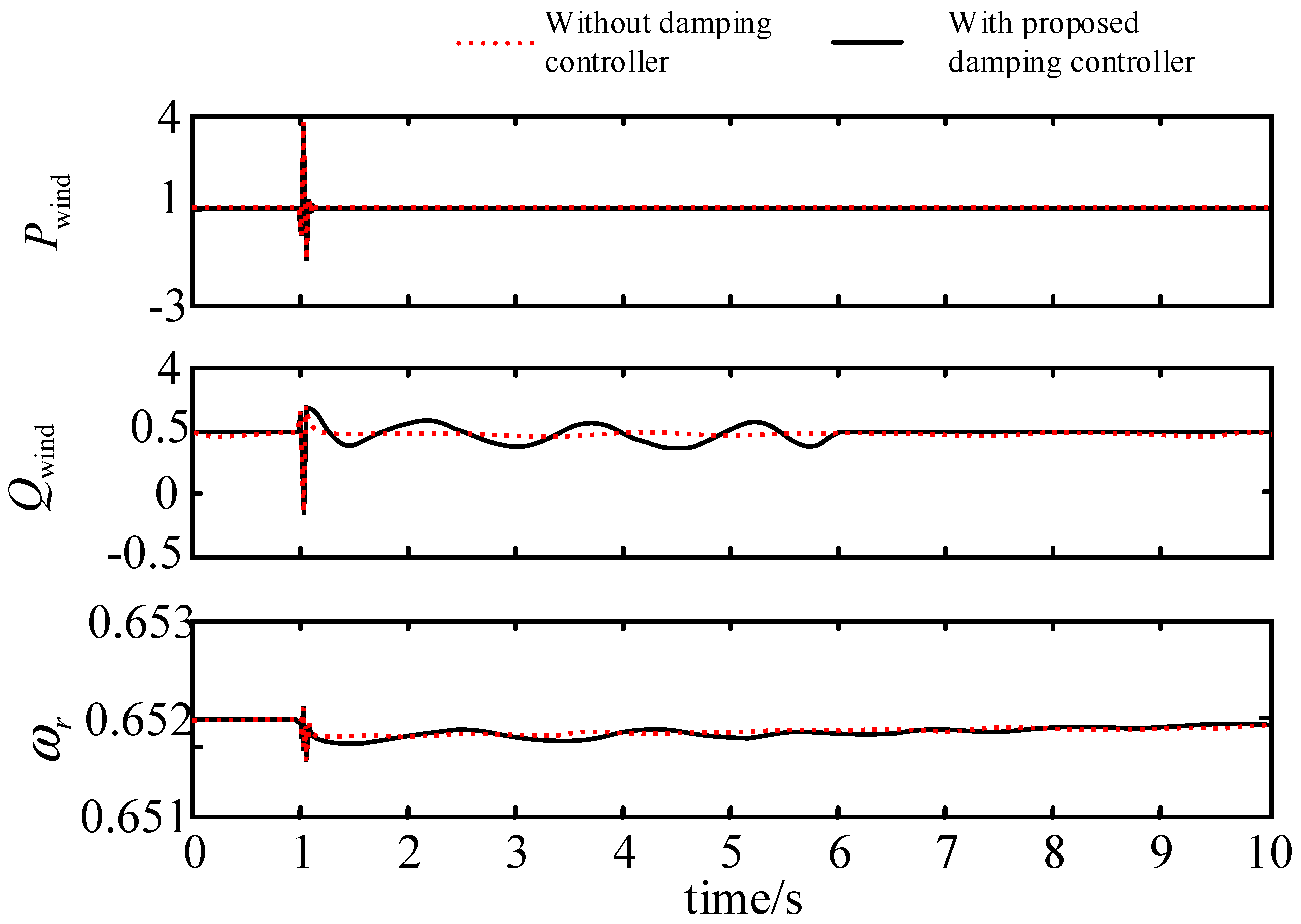
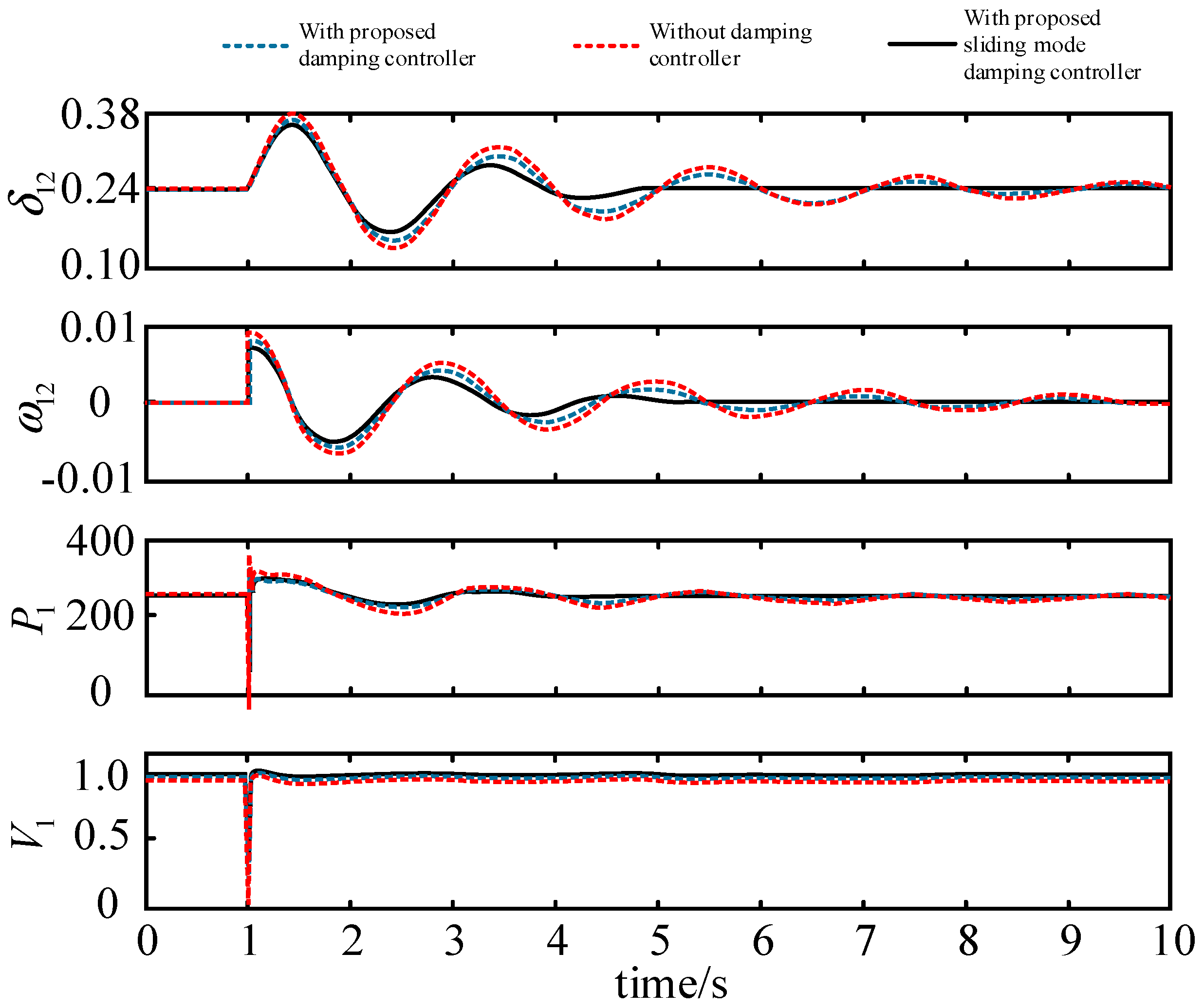
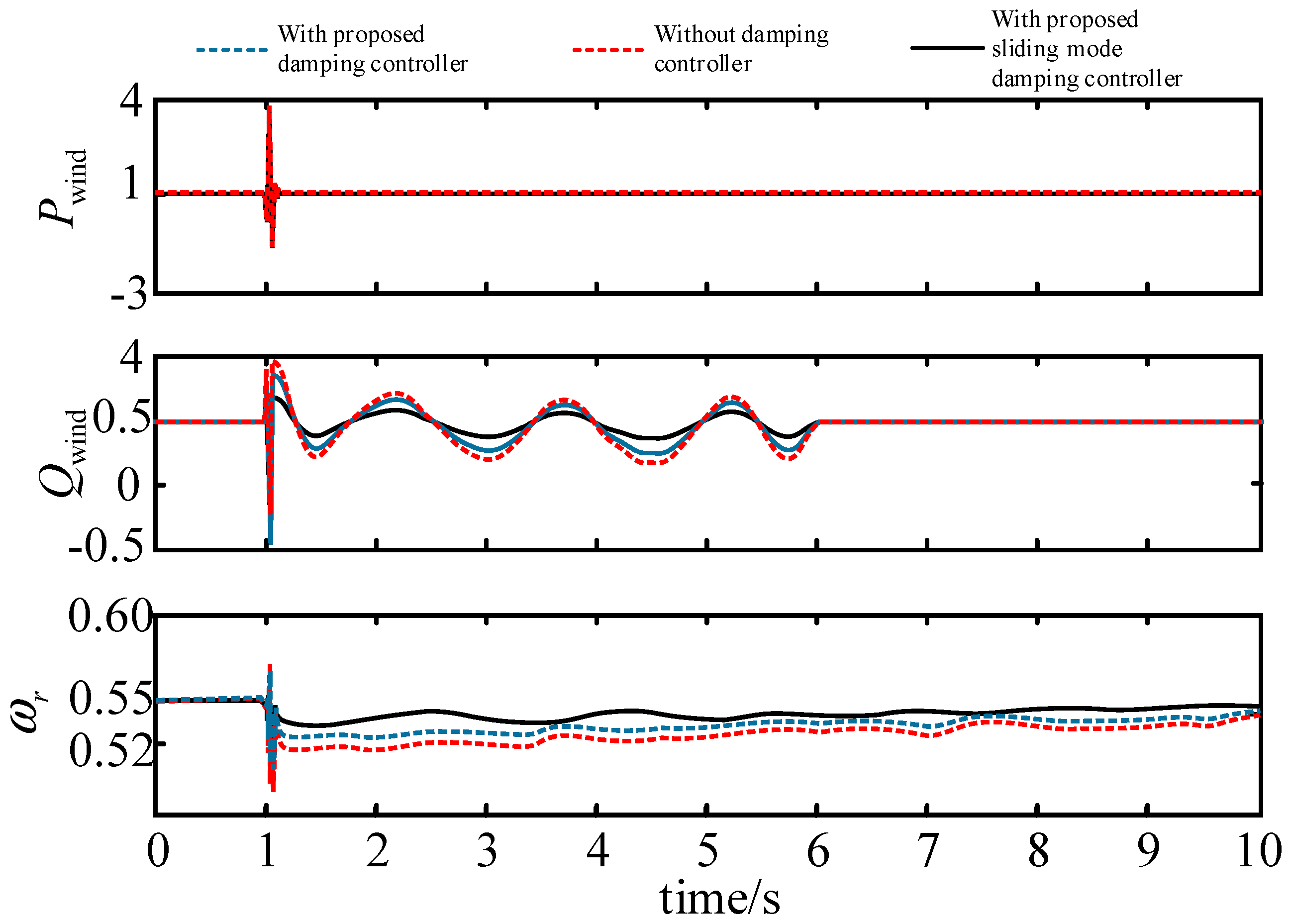
5. Simulation Research
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| DFIG | doubly fed induction generator |
| SSCI | sub-synchronous control interaction |
| STATCOM | static synchronous compensator |
| SVC | static var compensator |
| δ | generator rotor angle |
| δ12 | relative rotor angle |
| ω12 | relative rotor speed |
| H1 | inertia of area 1 |
| H2 | inertia of area 2 |
| Pw | wind farm power |
| Q1 | moved power |
| Qs0 | SG reactive power |
| Qw | DFIG reactive power |
| s | sole output of n |
| a, b, | smooth functions |
| GSC | grid side converter |
| RSC | rotor side converter |
| PCC | point of common coupling |
| Cdc | DC bus capacitance |
| Udc | DC bus voltage |
| given DC bus voltage | |
| ua, ub, uc | voltage at PCC |
| ia, ib, ic | current at PCC |
| iga, igb, igc | output voltage at GSC port |
| uia, uib, uic | output current at GSC port |
| isa, isb, isc | generator stator side currents |
| usa, usb, usc | generator stator side voltage |
| θpLL | phase angle obtained by PLL |
| mra, mrb, mrc | output modulation signals of RSC |
| mia, mib, mic | output modulation signals of GSC |
| Rs, Rr | resistance values of winding |
| Yp | positive sequence conductance |
| Yc | negative sequence conductance |
| HP(s), HQ(s) | loop PI control transfer functions |
Appendix A
References
- Wu, C.; Zhang, X.-P.; Sterling, M. Wind power generation variations and aggregations. CSEE J. Power Energy Syst. 2022, 8, 17–38. [Google Scholar]
- Chen, P.; Qi, C.; Chen, X. Virtual inertia estimation method of DFIG-based wind farm with additional frequency control. J. Mod. Power Syst. Clean Energy 2021, 9, 1076–1087. [Google Scholar] [CrossRef]
- Ning, L.; Zhao, G.; Du, L.; Wang, S.; Chen, Y. Multi-Domain Optimal Scheduling of Wind Power Systems Based on Voltage Stability Constraints. In Proceedings of the 2020 International Conference on Artificial Intelligence and Electromechanical Automation (AIEA), Tianjin, China, 26–28 June 2020; pp. 1373–1384. [Google Scholar]
- Kunjumuhammed, L.; Pal, B.; Oates, C.; Dyke, K. Electrical oscillations in wind farm systems: Analysis and insight based on detailed modeling. IEEE Trans Sustain. Energy 2016, 1, 51–62. [Google Scholar] [CrossRef] [Green Version]
- Edrah, M.; Lo, K.L.; Anaya-Lara, O. Impacts of high penetration of DFIG wind turbines on rotor angle stability of power systems. IEEE Trans. Sustain. Energy 2015, 3, 759–766. [Google Scholar] [CrossRef] [Green Version]
- Qi, L.; Jiahui, W.; Haiyun, W.; Hua, Z.; Jian, Y. Effect of DFIG control parameters on small signal stability in power systems. Sci. Rep. 2023, 13, 2476. [Google Scholar] [CrossRef]
- Huang, H.; Nie, J.; Li, Z.; Wang, K. Distributed dynamic reactive power support system based on doubly-fed wind turbine. Power Syst. Prot. Control 2016, 44, 140–147. [Google Scholar]
- Mir, A.S.; Senroy, N. DFIG Damping Controller Design Using Robust CKF-Based Adaptive Dynamic Programming. IEEE Trans. Sustain. Energy 2020, 11, 140–147. [Google Scholar] [CrossRef]
- Tang, Y.; He, H.; Wen, J.; Liu, J. Power system stability control for a wind farm based on adaptive dynamic programming. IEEE Trans. Smart Grid. 2015, 6, 166–177. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Yang, P.; Ren, Z.; Zheng, B.; Chen, C.; Zhang, X. Mitigation of SSCI in the DFIG Based Large Scale Wind Power System with Optimized Multimode Damping Controller. In Proceedings of the 10th Renewable Power Generation Conference (RPG 2021), Online, 14–15 October 2021; pp. 666–671. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Boudjema, Z.; Belaidi, A. Direct power control with NSTSM algorithm for DFIG using SVPWM technique. Iran. J. Electr. Electron. Eng. 2021, 17, 1–11. [Google Scholar]
- Surinkaew, T.; Ngamroo, I. Coordinated robust control of DFIG wind turbine and PSS for stabilization of power oscillations considering system uncertainties. IEEE Trans. Sustain. Energy 2014, 5, 51–62. [Google Scholar] [CrossRef]
- Wang, T.; Jin, M.; Li, Y.; Wang, J.; Wang, Z.; Huang, S. Adaptive Damping Control Scheme for Wind Grid-Connected Power Systems with Virtual Inertia Control. IEEE Trans. Power Syst. 2022, 37, 3902–3912. [Google Scholar] [CrossRef]
- Pourboghrat, F.; Farid, F.; Hatziadoniu, C.J.; Daneshdoost, M.; Mehdian, F. Local sliding control for damping interarea poweroscillations. IEEE Trans. Power Syst. 2004, 19, 1123–1134. [Google Scholar] [CrossRef]
- Darvish Falehi, A. An optimal second-order sliding mode based inter-area oscillation suppressor using chaotic whale optimization algorithm for doubly fed induction generator. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 35, 2963. [Google Scholar] [CrossRef]
- Gebremedhin, A.; Mariona, Z. Power system analysis: The case of Albania. Int. J. Innov. Technol. Interdiscip. Sci. 2020, 3, 501–512. [Google Scholar]
- Kundur, P.S.; Malik, O.P. Power System Stability and Control; McGraw-Hill Education: New York, NY, USA, 2021. [Google Scholar]
- Hashmy, Y.; Yu, Z.; Shi, D.; Weng, Y. Wide-area measurement system-based low frequency oscillation damping control through reinforcement learning. IEEE Trans. Smart Grid. 2020, 11, 5072–5083. [Google Scholar] [CrossRef]
- Zehra, S.S.; Rahman, A.U.; Armghan, H.; Ahmad, I.; Ammara, U. Artificial intelligence-based nonlinear control of renewable energies and storage system in a DC microgrid. ISA Trans. 2022, 121, 217–231. [Google Scholar] [CrossRef] [PubMed]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides: Control Systems; Springer Science & Business Media: Dordrecht, The Netherlands, 2013; p. 18. [Google Scholar]
- Xiong, X.; Kamal, S.; Jin, S. Adaptive gains to super-twisting technique for sliding mode design. Asian J. Control. 2021, 23, 362–373. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Xu, Z.; Østergaard, J.; Dong, Z.Y.; Wong, K.P.; Ma, X. Oscillatory stability and eigenvalue sensitivity analysis of a dfig wind turbine system. IEEE Trans. Energy Convers. 2011, 26, 328–339. [Google Scholar] [CrossRef] [Green Version]
- Liao, K.; He, Z.; Xu, Y.; Chen, G.; Dong, Z.Y.; Wong, K.P. A Sliding Mode Based Damping Control of DFIG for Interarea Power Oscillations. IEEE Trans. Sustain. Energy 2017, 8, 258–267. [Google Scholar] [CrossRef]
- Mireles-Perez, C.; Gomez-Correa, M.; Cruz-Ortiz, D.; Ballesteros, M.; Salgado, I. First-order sliding mode control for second order systems with asymmetric constraints. In Proceedings of the 2022 10th International Conference on Systems and Control (ICSC), Marseille, France, 23–25 November 2022; pp. 227–232. [Google Scholar] [CrossRef]
- Pan, H.; Zhang, G.; Ouyang, H.; Mei, L. A novel global fast terminal sliding mode control scheme for second-order systems. IEEE Access 2020, 8, 22758–22769. [Google Scholar] [CrossRef]
- Xu, Y.; Nian, H.; Wang, T.; Chen, L.; Zheng, T. Frequency Coupling Characteristic Modeling and Stability Analysis of Doubly Fed Induction Generator. IEEE Trans. Energy Convers. 2018, 33, 1475–1486. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated capacity S/MW | 1.5 |
| DC voltage Udc/kV | 1.5 |
| AC voltage V1/V | 563 |
| Polar logarithm p | 2 |
| Mutual inductance Lm(pu) | 4.1 |
| Stator resistance rs(pu) | 0.007 |
| Rotor resistance Rr(pu) | 0.005 |
| Rotor inductance Llr(pu) | 0.11 |
| line inductor inductance XL/km | 0.25 |
| line inductor resistance R/km | 0.023 |
| line capacitance resistance nF /km | 12 |
| Coupling inductor inductance L(pu) | 0.00178 |
| Coupling inductor resistance R(pu) | 0.000929 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Wu, J.; Wang, H.; Zhang, H.; Yang, J. Analysis of DFIG Interval Oscillation Based on Second-Order Sliding Film Damping Control. Energies 2023, 16, 3091. https://doi.org/10.3390/en16073091
Liu Q, Wu J, Wang H, Zhang H, Yang J. Analysis of DFIG Interval Oscillation Based on Second-Order Sliding Film Damping Control. Energies. 2023; 16(7):3091. https://doi.org/10.3390/en16073091
Chicago/Turabian StyleLiu, Qi, Jiahui Wu, Haiyun Wang, Hua Zhang, and Jian Yang. 2023. "Analysis of DFIG Interval Oscillation Based on Second-Order Sliding Film Damping Control" Energies 16, no. 7: 3091. https://doi.org/10.3390/en16073091