
Fast Aero-Structural Model of a Leading-Edge Inflatable Kite



Abstract
:1. Introduction
2. Computational Approach
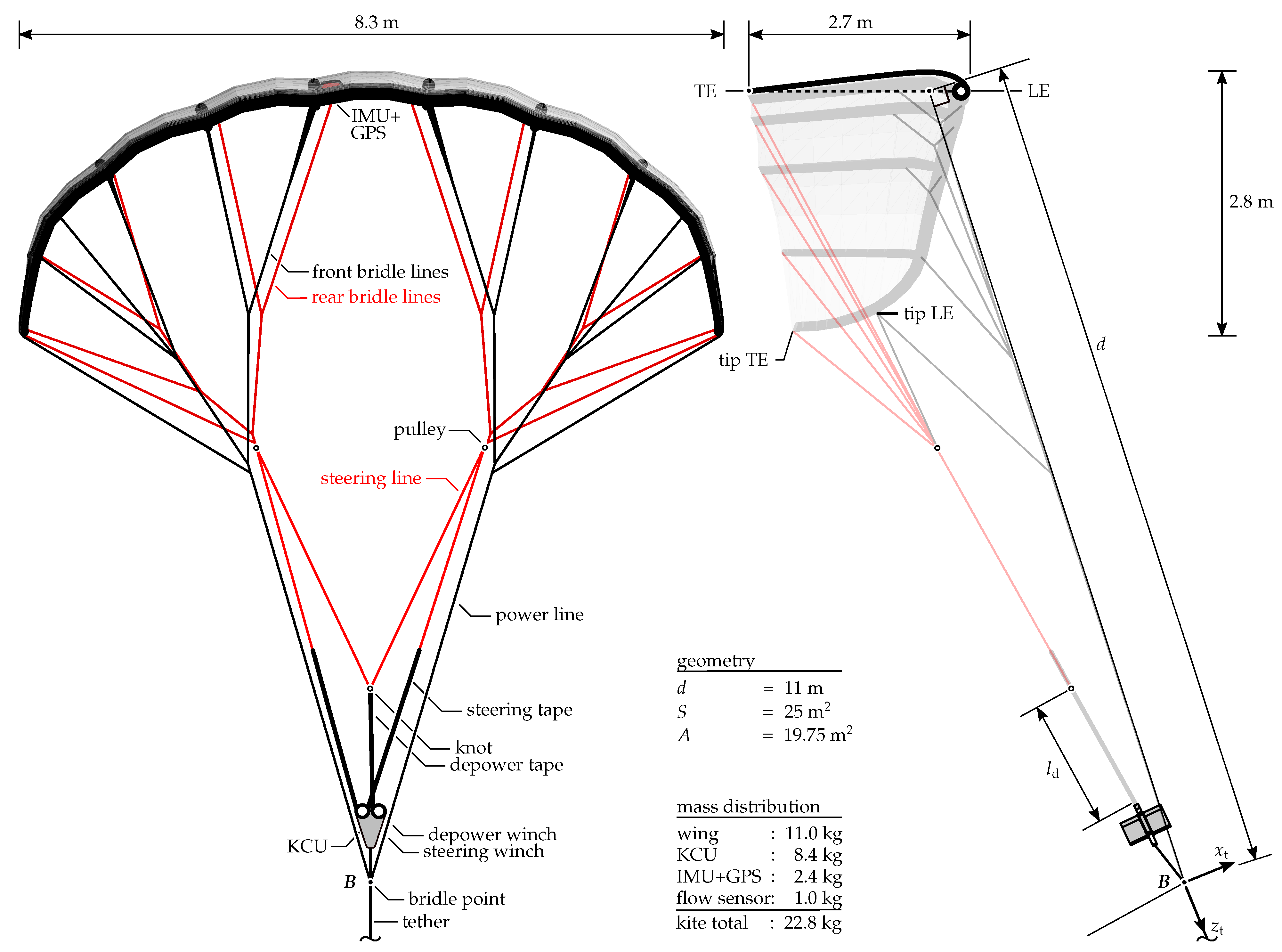
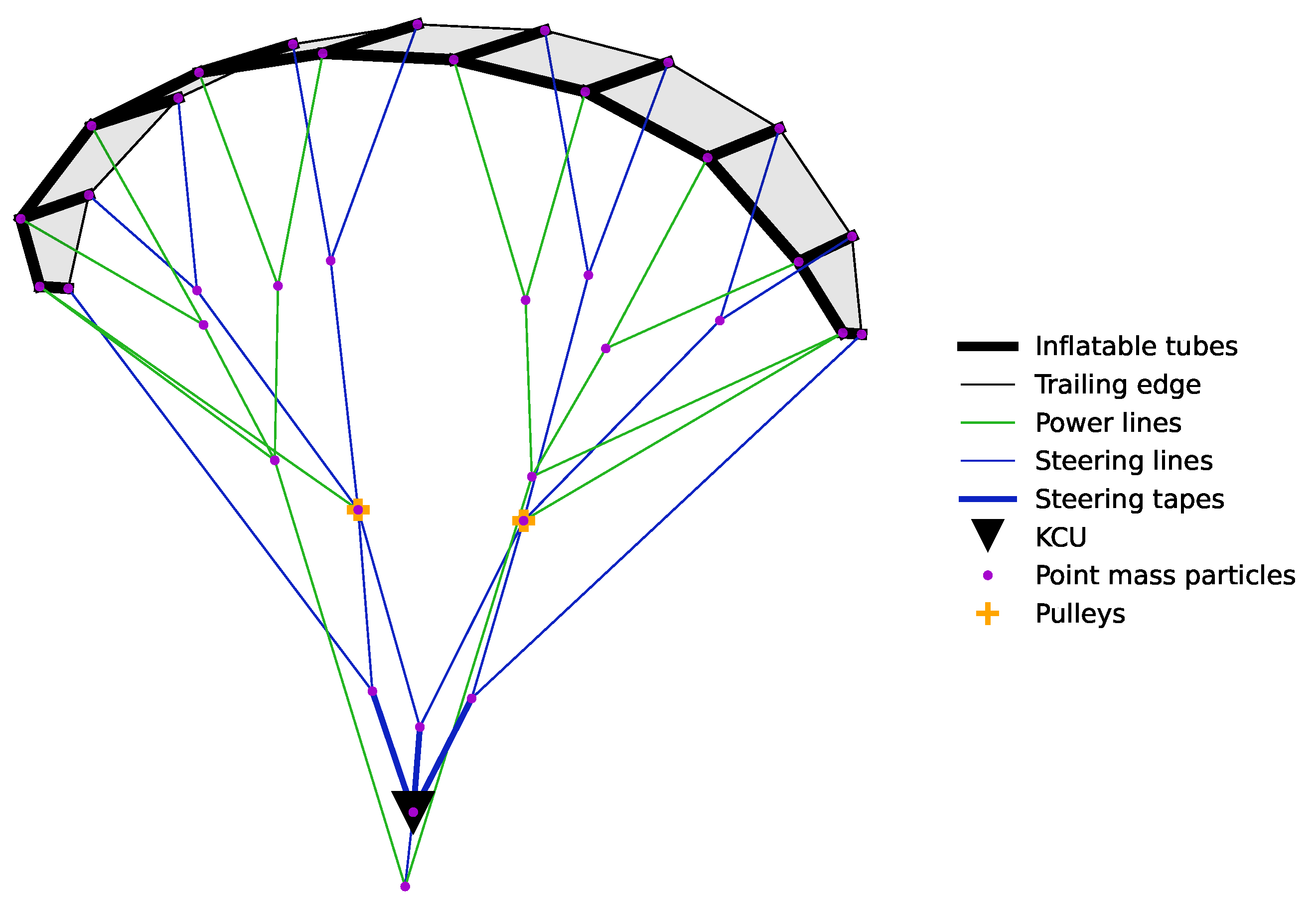
2.1. Structural Model
2.2. Aerodynamic Model
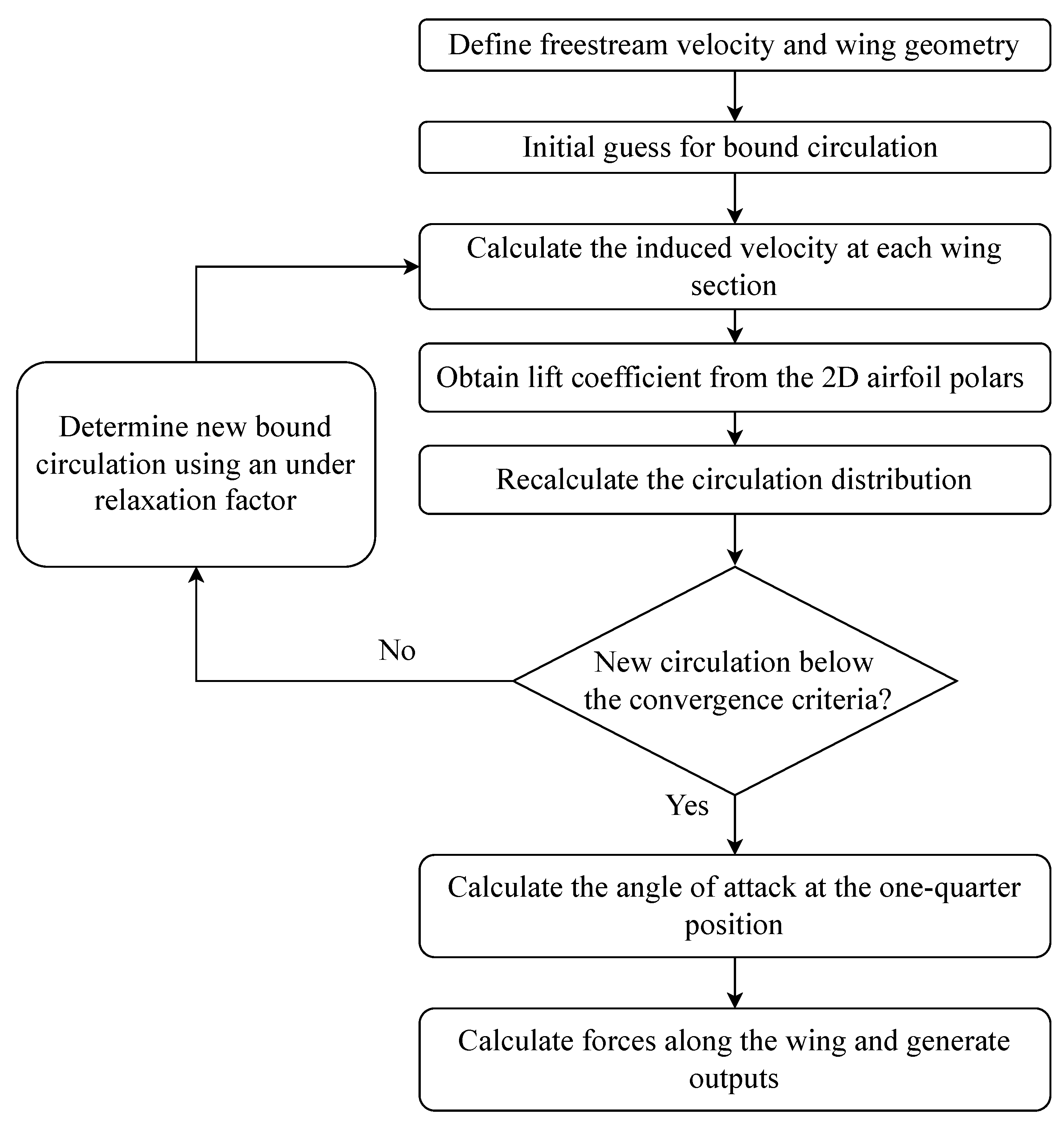
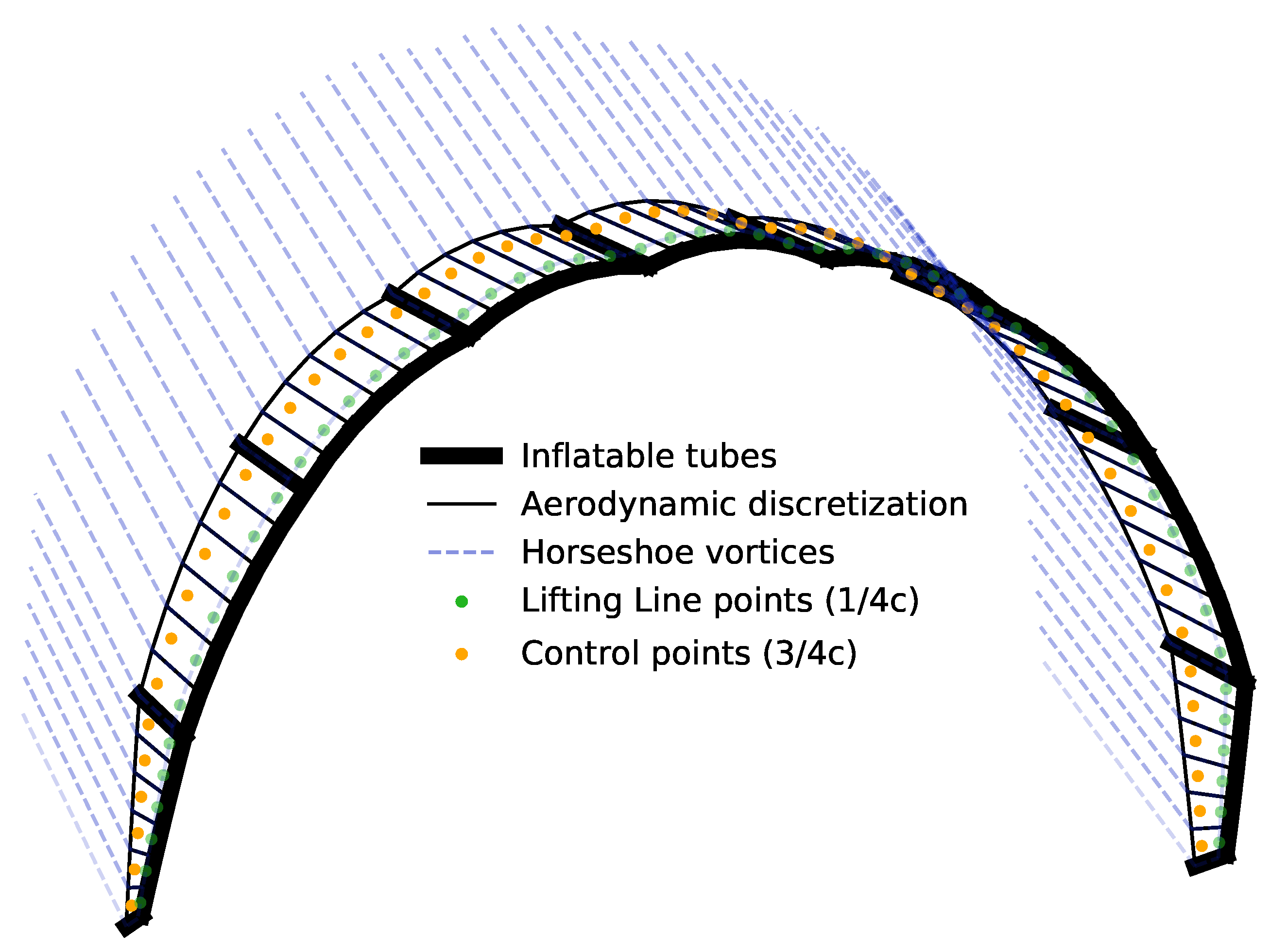
- Generate the wing geometry, along with the definition of the vortex filaments, control points, and the relevant vectors for each section.
- Start with an initial guess for the bound circulation () to initiate the iterative process to find a solution.
- Calculate the relative velocity () at each control point (), i.e., the velocity seen by the airfoil, which is found by relating the inner 2D region (airfoil) to the outer 3D region (vorticity system) as follows:where is the velocity at the three-quarter chord position, is the freestream velocity, is the velocity induced by the 3D vorticity system toward the control point (), and is the velocity induced by an infinite filament positioned at the one-quarter chord of the current section.Induced velocities are calculated with the previous circulation distribution by using the Biot–Savart law, which relates the strength of a vortex filament to the magnitude and direction of the flow field that it induces. is calculated as the sum of the velocities induced by all the sections, and only takes into account each section’s own circulation.
- Calculate the effective angles of attack () with the direction of the relative velocities with respect to the airfoil and interpolate the lift coefficients () from the 2D airfoil polars.
- Recalculate the bound circulation at each section with the obtained lift coefficients using the Kutta–Joukowski law, which relates the lift force (L) with the bound circulation, formulated aswhere is the air density, c is the airfoil chord, and is the local unit vector along the airfoil’s z-axis, in the direction of the lifting line.
- Compare the updated circulation to the last iteration and check if it falls below the convergence criteria. If it does not, go back to step 3. For the next iteration, the circulation is calculated using an under-relaxation factor to stabilize the solution.
- Recalculate the local angles of attack at the quarter-chord position using the converged circulation distribution.
- Convert the local forces into the freestream velocity direction and derive the global lift and drag coefficients by integrating the forces along the span.
2.3. Aero-Structural Coupling
2.4. Photogrammetry
3. Results
3.1. Kite Deformation
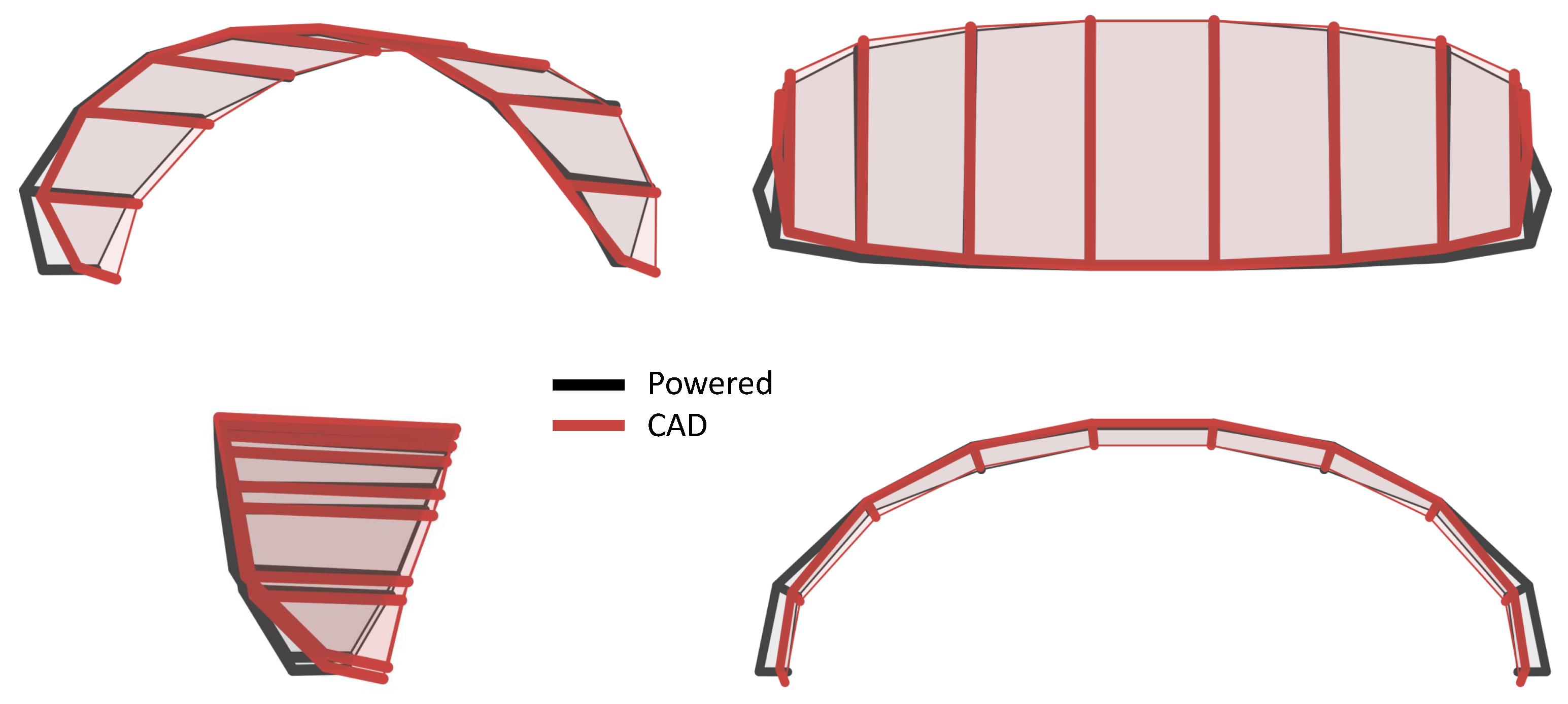
3.1.1. CAD Geometry versus Powered Wing Shape
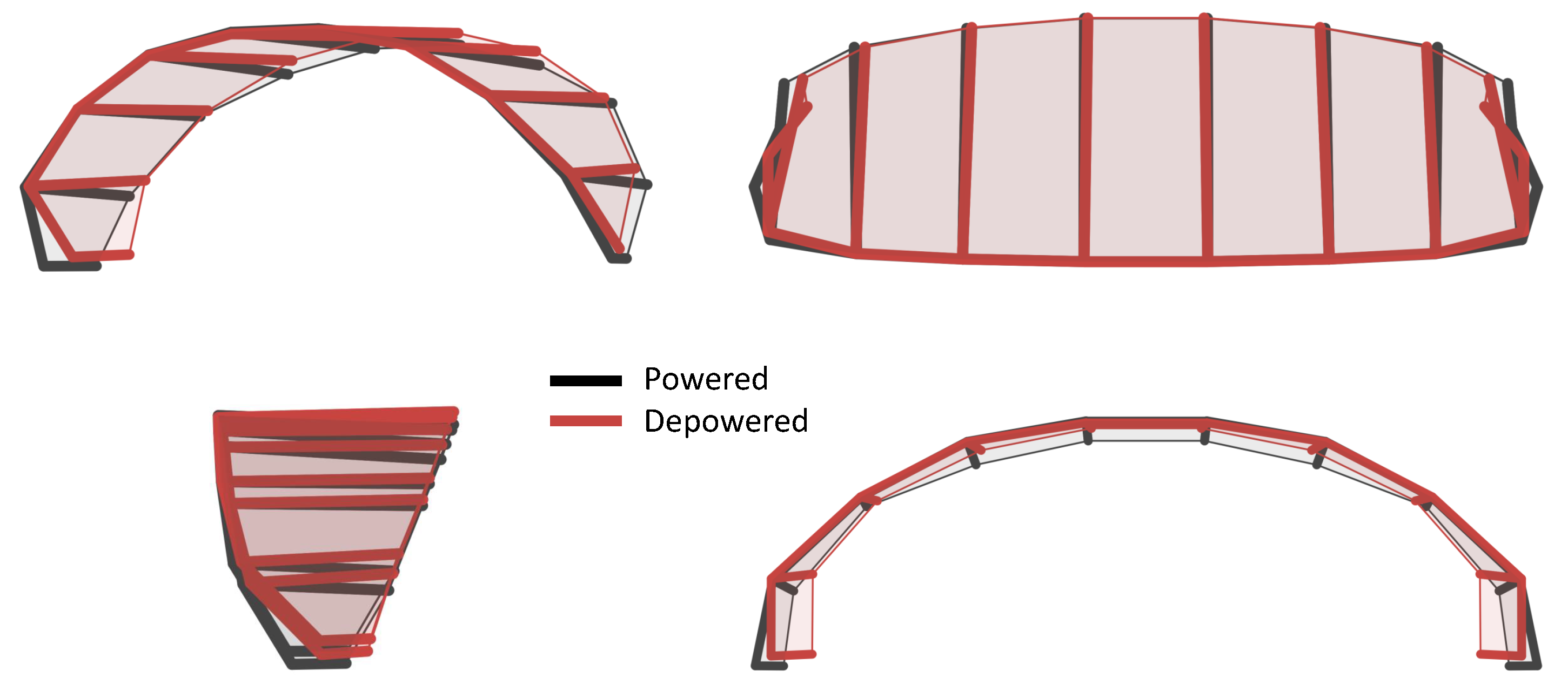
3.1.2. Powered versus Depowered Wing Shape
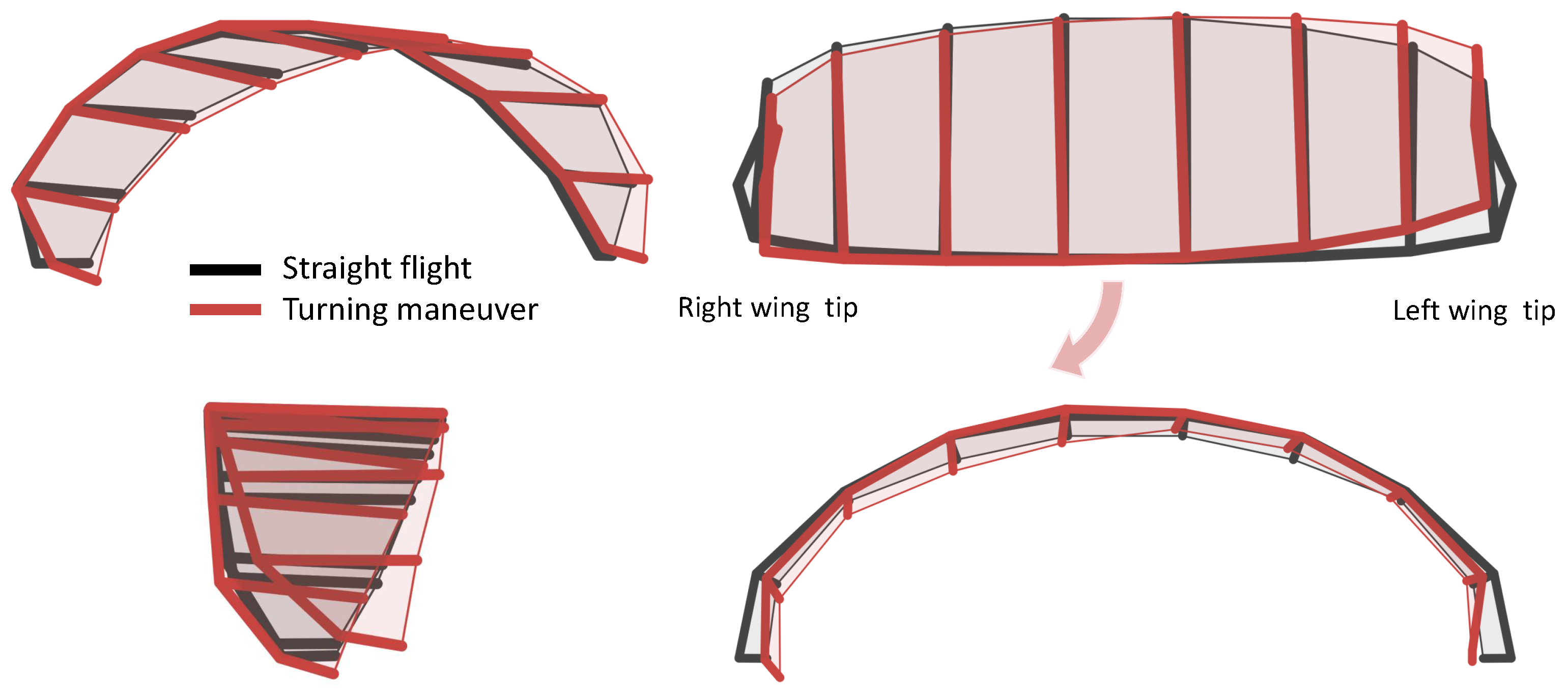
3.1.3. Wing Shape for Powered Straight Flight versus Turning Maneuvers
3.2. Kite Aerodynamics
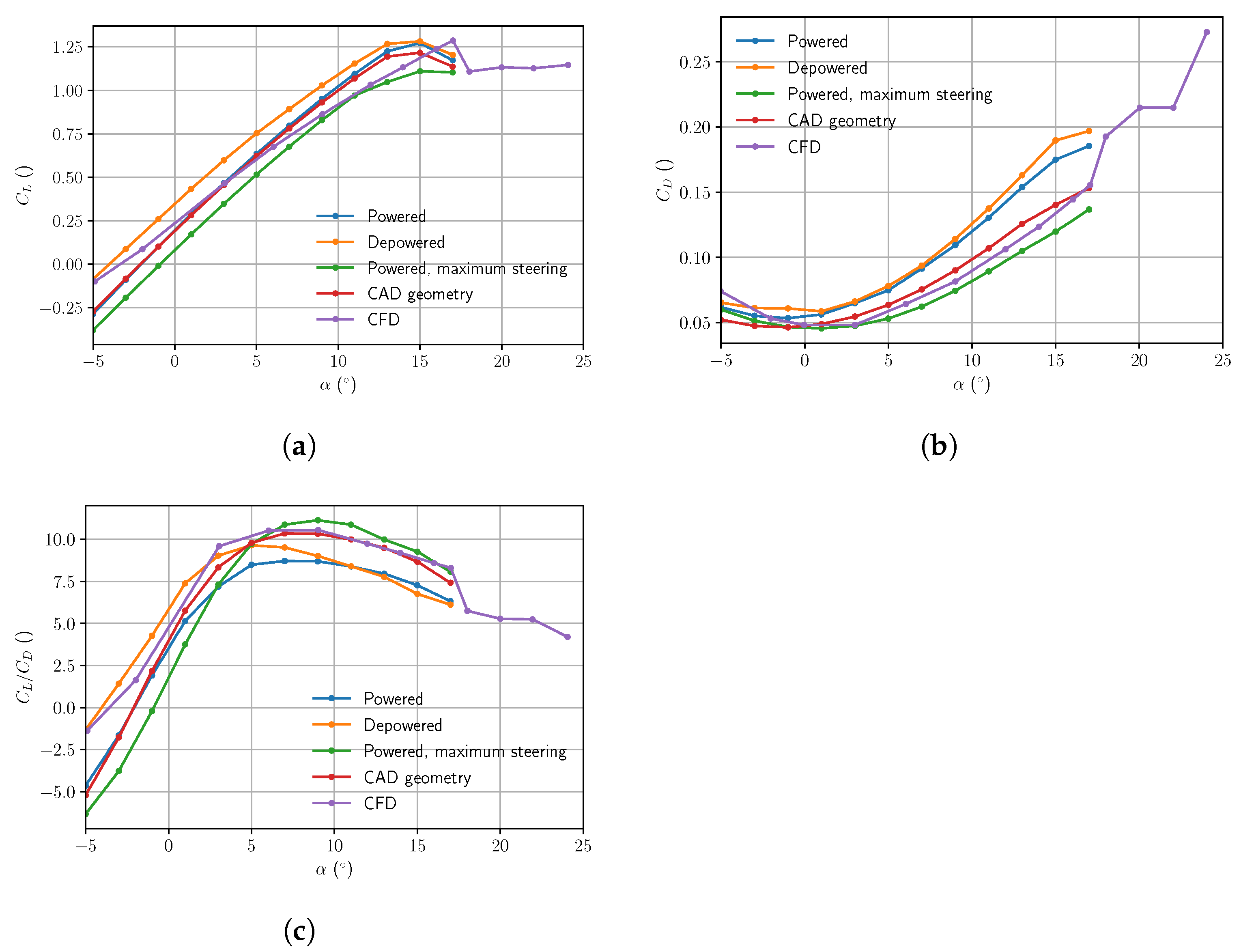
3.2.1. Computed Aerodynamic Properties
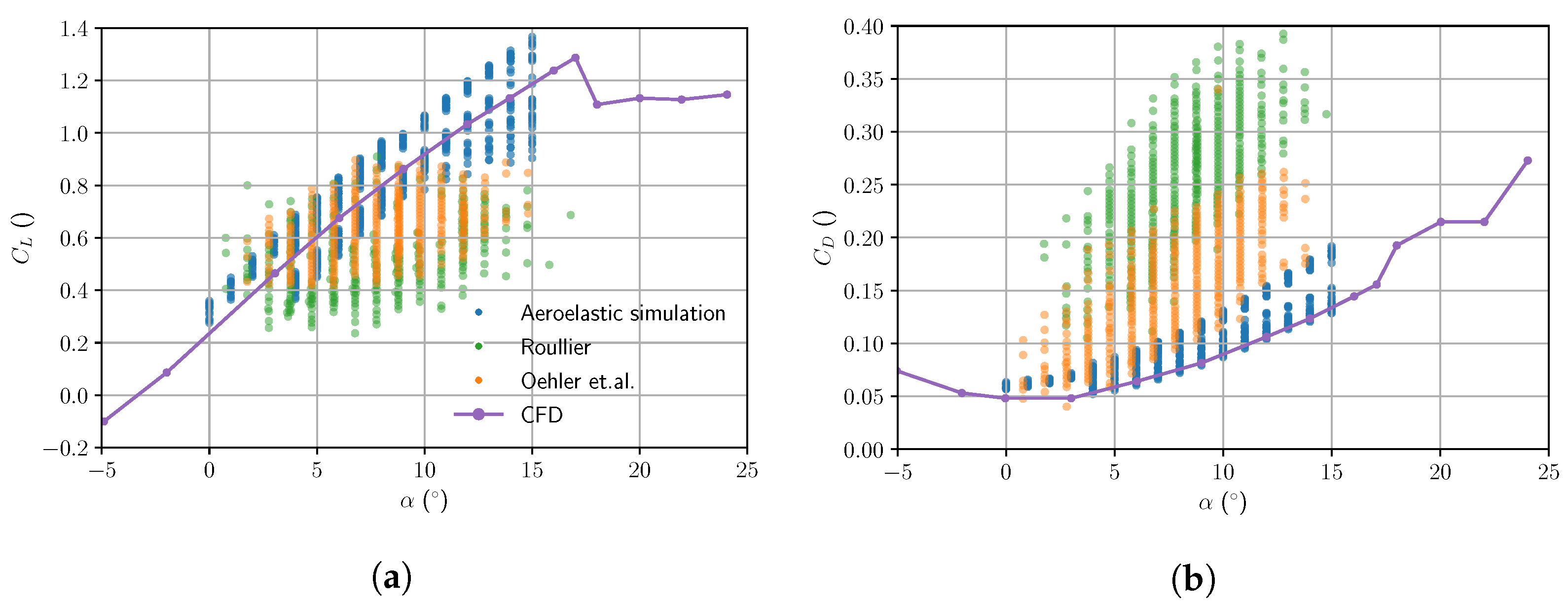
3.2.2. Comparison with Experimental Results
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| AWE | Airborne wind energy |
| CAD | Computer-aided design |
| CFD | Computational fluid dynamics |
| FE | Finite element |
| FEM | Finite element method |
| FSI | Fluid-structure interaction |
| KCU | Kite control unit |
| LE | Leading edge |
| LEI | Leading-edge inflatable |
| LLM | Lifting line method |
| PSM | Particle system model |
| TE | Trailing edge |
| RANS | Reynolds-averaged Navier–Stokes |
| VSM | Vortex step method |
References
- Kleidon, A. Physical limits of wind energy within the atmosphere and its use as renewable energy: From the theoretical basis to practical implications. Meteorol. Z. 2021, 30, 203–225. [Google Scholar] [CrossRef]
- Archer, C.L.; Caldeira, K. Global assessment of high-altitude wind power. Energies 2009, 2, 307–319. [Google Scholar] [CrossRef] [Green Version]
- Zillmann, U.; Hach, S. Financing Strategies for Airborne Wind Energy. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 7; pp. 117–137. [Google Scholar] [CrossRef]
- van Hagen, L.; Petrick, K.; Wilhelm, S.; Schmehl, R. Life-Cycle Assessment of a Multi-Megawatt Airborne Wind Energy System. Energies 2023, 16, 1750. [Google Scholar] [CrossRef]
- Oehler, J.; Schmehl, R. Aerodynamic characterization of a soft kite by in situ flow measurement. Wind Energy Sci. 2019, 4, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Folkersma, M.; Schmehl, R.; Viré, A. Steady-state aeroelasticity of a ram-air wing for airborne wind energy applications. J. Phys. Conf. Ser. 2020, 1618, 032018. [Google Scholar] [CrossRef]
- Breukels, J. An Engineering Methodology for Kite Design. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2011. Available online: http://resolver.tudelft.nl/uuid:cdece38a-1f13-47cc-b277-ed64fdda7cdf (accessed on 1 March 2023).
- Bosch, H.A. Finite Element Analysis of a Kite for Power Generation. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2012. Available online: http://resolver.tudelft.nl/uuid:888fe64a-b101-438c-aa6f-8a0b34603f8e (accessed on 30 November 2022).
- Bosch, A.; Schmehl, R.; Tiso, P.; Rixen, D. Nonlinear Aeroelasticity, Flight Dynamics and Control of a Flexible Membrane Traction Kite. In Airborne Wind Energy; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 17; pp. 307–323. [Google Scholar] [CrossRef]
- Bosch, A.; Schmehl, R.; Tiso, P.; Rixen, D. Dynamic Nonlinear Aeroelastic Model of a Kite for Power Generation. J. Guid. Control. Dyn. 2014, 37, 1426–1436. [Google Scholar] [CrossRef] [Green Version]
- Geschiere, N. Dynamic Modelling of a Flexible Kite for Power Generation. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2014. Available online: http://resolver.tudelft.nl/uuid:6478003a-3c77-40ce-862e-24579dcd1eab (accessed on 1 March 2023).
- Gaunaa, M.; Paralta Carqueija, P.F.; Réthoré, P.E.M.; Sørensen, N.N. A Computationally Efficient Method for Determining the Aerodynamic Performance of Kites for Wind Energy Applications. In Proceedings of the European Wind Energy Association Conference, Brussels, Belgium, 14–17 March 2011. [Google Scholar]
- van Kappel, R. Aerodynamic Analysis Tool for Dynamic Leading Edge Inflated Kite Models: A Non-Linear Vortex Lattice Method. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2012. Available online: http://resolver.tudelft.nl/uuid:385d316b-c997-4a02-b0f3-b30c40fffc32 (accessed on 30 November 2022).
- Leloup, R.; Roncin, K.; Bles, G.; Leroux, J.B.; Jochum, C.; Parlier, Y. Estimation of the lift-to-drag ratio using the lifting line method: Application to a leading edge inflatable kite. In Airborne Wind Energy; Ahrens, U., Schmehl, R., Diehl, M., Eds.; Green Energy and Technology; Springer: Berlin/Heidelberg, Germany, 2013; Chapter 19; pp. 339–355. [Google Scholar] [CrossRef]
- Branlard, E.; Brownstein, I.; Strom, B.; Jonkman, J.; Dana, S.; Baring-Gould, E.I. A multipurpose lifting-line flow solver for arbitrary wind energy concepts. Wind Energy Sci. 2022, 7, 455–467. [Google Scholar] [CrossRef]
- OpenFAST: Open-Source Wind Turbine Simulation Tool. Available online: http://github.com/OpenFAST/OpenFAST/ (accessed on 15 March 2023).
- Thedens, P. An Integrated Aero-Structural Model for Ram-Air Kite Simulations with Application to Airborne Wind Energy. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2022. [Google Scholar] [CrossRef]
- de Solminihac, A.; Nême, A.; Duport, C.; Leroux, J.B.; Roncin, K.; Jochum, C.; Parlier, Y. Kite as a beam: A fast method to get the flying shape. In Airborne Wind Energy–Advances in Technology Development and Research; Schmehl, R., Ed.; Green Energy and Technology; Springer: Singapore, 2018; Chapter 4; pp. 79–97. [Google Scholar] [CrossRef] [Green Version]
- Duport, C. Modeling with Consideration of the Fluid-Structure Interaction of the Behavior under Load of a Kite for Auxiliary Traction of Ships. Ph.D. Thesis, LBMS, ENSTA-Bretagne, Brest, France, 2018. Available online: https://theses.hal.science/tel-02383312/ (accessed on 1 March 2023).
- van Til, J.; De Lellis, M.; Saraiva, R.; Trofino, A. Dynamic model of a C-shaped bridled kite using a few rigid plates. In Airborne Wind Energy–Advances in Technology Development and Research; Schmehl, R., Ed.; Green Energy and Technology; Springer: Singapore, 2018; Chapter 5; pp. 99–115. [Google Scholar] [CrossRef]
- Oehler, J.; van Reijen, M.; Schmehl, R. Experimental Investigation of Soft Kite Performance during Turning Maneuvers. J. Phys. Conf. Ser. 2018, 1037, 052004. [Google Scholar] [CrossRef]
- van der Vlugt, R.; Bley, A.; Noom, M.; Schmehl, R. Quasi-steady model of a pumping kite power system. Renew. Energy 2019, 131, 83–99. [Google Scholar] [CrossRef]
- Demkowicz, P. Numerical Analysis of the Flow Past a Leading Edge Inflatable Kite wing Using a Correlation-Based Transition Model. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. Available online: http://resolver.tudelft.nl/uuid:c53aa605-1b2e-47a7-b991-c1917d7463b4 (accessed on 1 March 2023).
- Lebesque, G. Steady-State RANS Simulation of a Leading Edge Inflatable Wing with Chordwise Struts. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2020. Available online: http://resolver.tudelft.nl/uuid:f0bc8a1e-088d-49c5-9b77-ebf9e31cf58b (accessed on 1 March 2023).
- Poland, J. Modelling Aeroelastic Deformation of Soft Wing Membrane Kites. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2022. Available online: http://resolver.tudelft.nl/uuid:39d67249-53c9-47b4-84c0-ddac948413a5 (accessed on 1 March 2023).
- Cayon, O. Fast Aeroelastic Model of a Leading-Edge Inflatable Kite for the Design Phase of Airborne Wind Energy Systems. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2022. Available online: http://resolver.tudelft.nl/uuid:aede2a25-4776-473a-8a75-fb6b17b1a690 (accessed on 1 March 2023).
- Damiani, R.; Wendt, F.; Jonkman, J.; Sicard, J. A vortex step method for nonlinear airfoil polar data as implemented in KiteAeroDyn. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef] [Green Version]
- Jonkman, J. Google/Makani Energy Kite Modeling; Cooperative Research and Development Final Report, CRADA Number CRD-18-00569 NREL/TP-5000-80635; National Renewable Energy Laborator: Golden, CO, USA, 2021. Available online: https://www.nrel.gov/docs/fy21osti/80635.pdf (accessed on 1 March 2023).
- Ranneberg, M. Direct Wing Design and Inverse Airfoil Identification with the Nonlinear Weissinger Method. arXiv 2015, arXiv:1501.04983. [Google Scholar]
- Pistolesi, E. Alcune Considerazioni sul Problema del Biplano Indefinito; Technical Report; Pisa R. Scuola d’Ingegneria: Pisa, Italy, 1929. [Google Scholar]
- Li, A.; Gaunaa, M.; Pirrung, G.R.; Forsting, A.M.; Horcas, S.G. How should the lift and drag forces be calculated from 2-D airfoil data for dihedral or coned wind turbine blades? Wind Energy Sci. 2022, 7, 1341–1365. [Google Scholar] [CrossRef]
- Leuthold, R. Multiple-Wake Vortex Lattice Method for Membrane-Wing Kites. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2015. Available online: http://resolver.tudelft.nl/uuid:4c2f34c2-d465-491a-aa64-d991978fedf4 (accessed on 1 March 2023).
- Thedens, P.; Schmehl, R. An Aero-Structural Model for Ram-Air Kite Simulations. Energies 2023, 16, 2603. [Google Scholar] [CrossRef]
- Posadzy, P.; Nski, M.M.; Roszak, R. Aeroelastic Tool for Flutter Simulation. In Proceedings of the 10th International Conference MMA, Trakai, Lithuania, 1–5 June 2005; pp. 111–116. [Google Scholar]
- Fechner, U.; Schmehl, R. Flight Path Planning in a Turbulent Wind Environment. In Airborne Wind Energy—Advances in Technology Development and Research; Schmehl, R., Ed.; Green Energy and Technology; Springer: Singapore, 2018; Chapter 15; pp. 361–390. [Google Scholar] [CrossRef] [Green Version]
- Roullier, A. Experimental Analysis of a Kite System’s Dynamics. Master’s Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2020. [Google Scholar] [CrossRef]
- Schelbergen, M.; Schmehl, R. Validation of the quasi-steady performance model for pumping airborne wind energy systems. J. Phys. Conf. Ser. 2020, 1618, 032003. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle of Attack (°) | Angle of Sideslip (°) | Power Setting | Steering Setting | |
|---|---|---|---|---|
| Straight-powered | 4–14 | 2–8 | 0.7–1 | 0 |
| Depowered | 0–8 | 0–4 | 0–0.6 | 0 |
| Turn-powered | 9–15 | 2–10 | 1 | 0.1–0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cayon, O.; Gaunaa, M.; Schmehl, R. Fast Aero-Structural Model of a Leading-Edge Inflatable Kite. Energies 2023, 16, 3061. https://doi.org/10.3390/en16073061
Cayon O, Gaunaa M, Schmehl R. Fast Aero-Structural Model of a Leading-Edge Inflatable Kite. Energies. 2023; 16(7):3061. https://doi.org/10.3390/en16073061
Chicago/Turabian StyleCayon, Oriol, Mac Gaunaa, and Roland Schmehl. 2023. "Fast Aero-Structural Model of a Leading-Edge Inflatable Kite" Energies 16, no. 7: 3061. https://doi.org/10.3390/en16073061