

Anchor Fault Identification Method for High-Voltage DC Submarine Cable Based on VMD-Volterra-SVM

Abstract
:1. Introduction
2. VMD-Volterra-SVM Algorithm
2.1. VMD Principle
2.2. Principle of the Volterra Model
2.3. SVM Principle
2.4. VMD-Volterra-SVM Algorithm Flow
3. Simulation Analysis
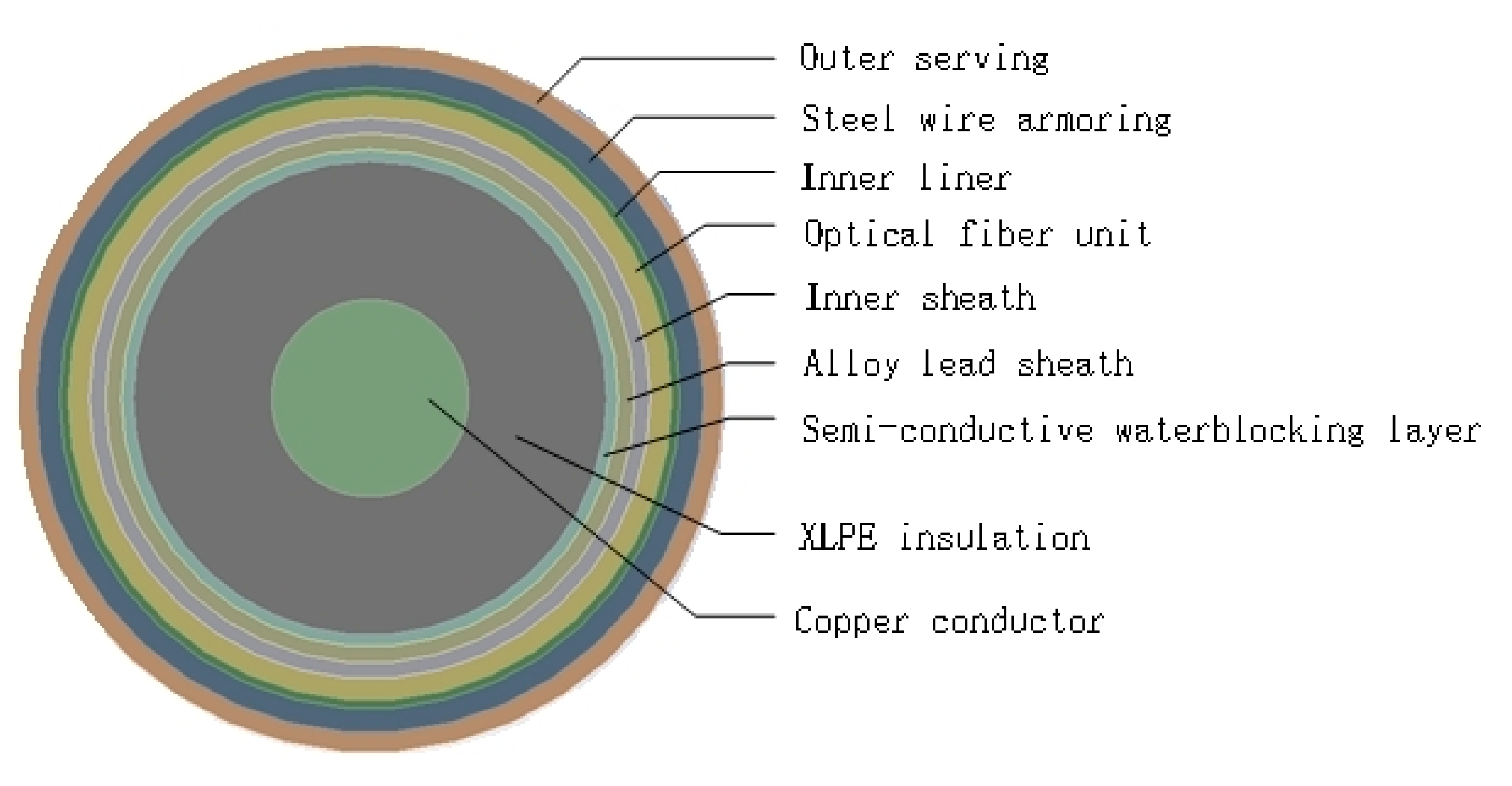
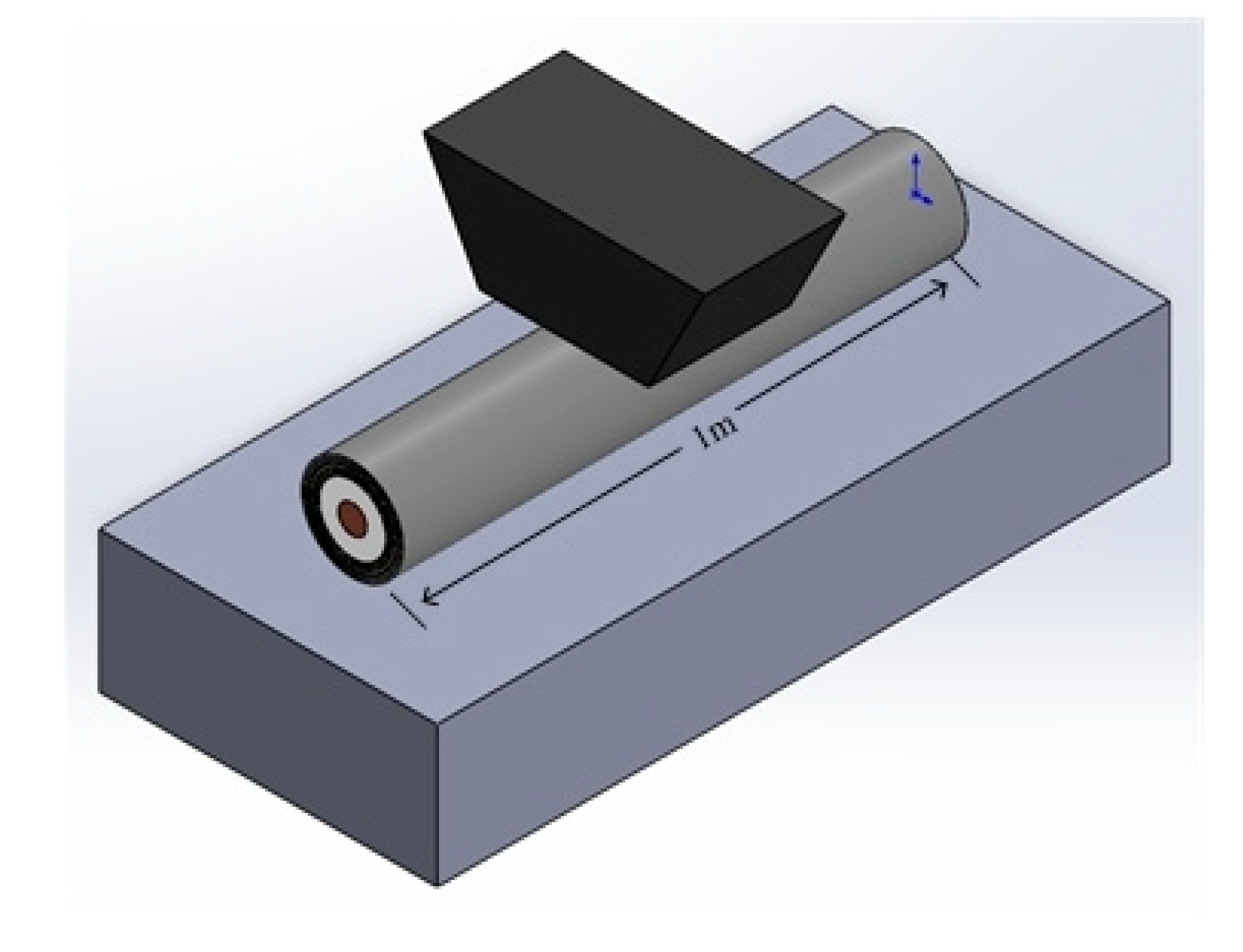
3.1. Finite Element Model Building
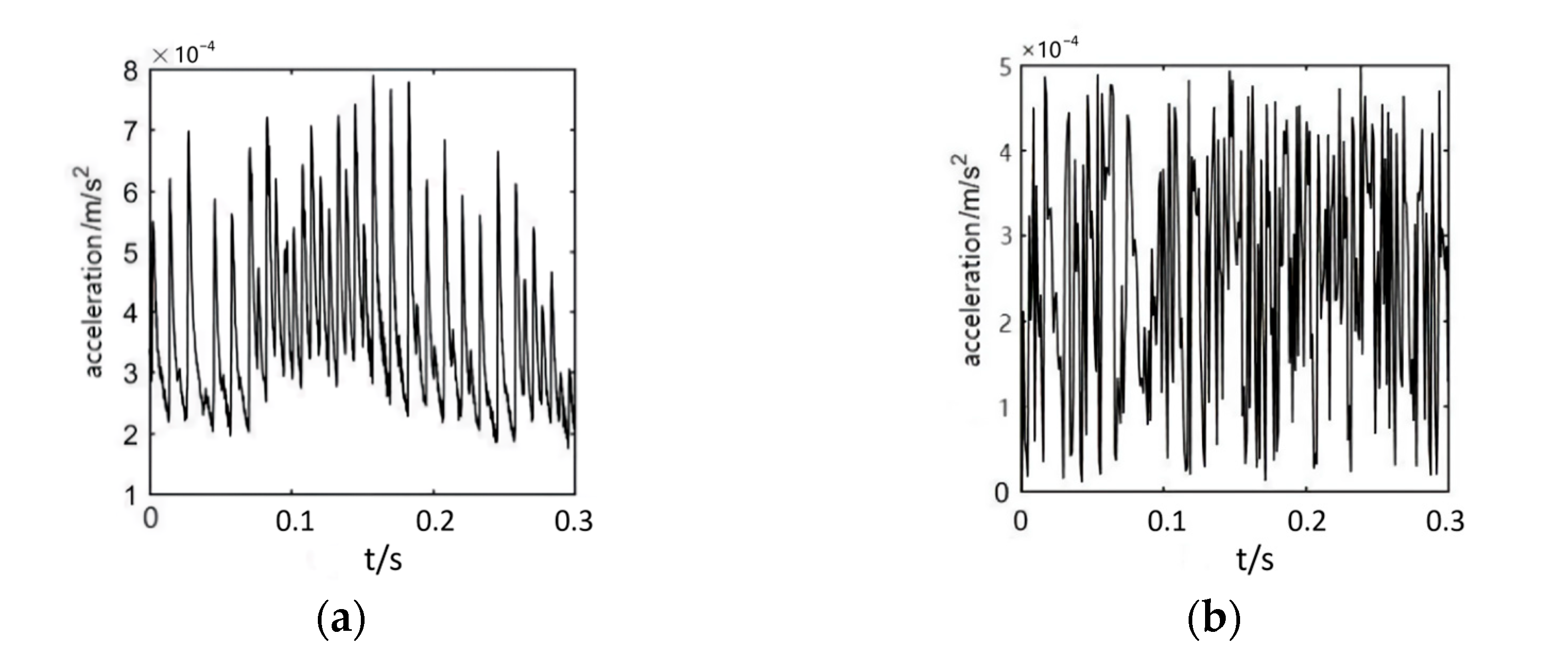
3.2. Finite Element Simulation Results
4. VMD-Volterra-SVM Algorithm Validation
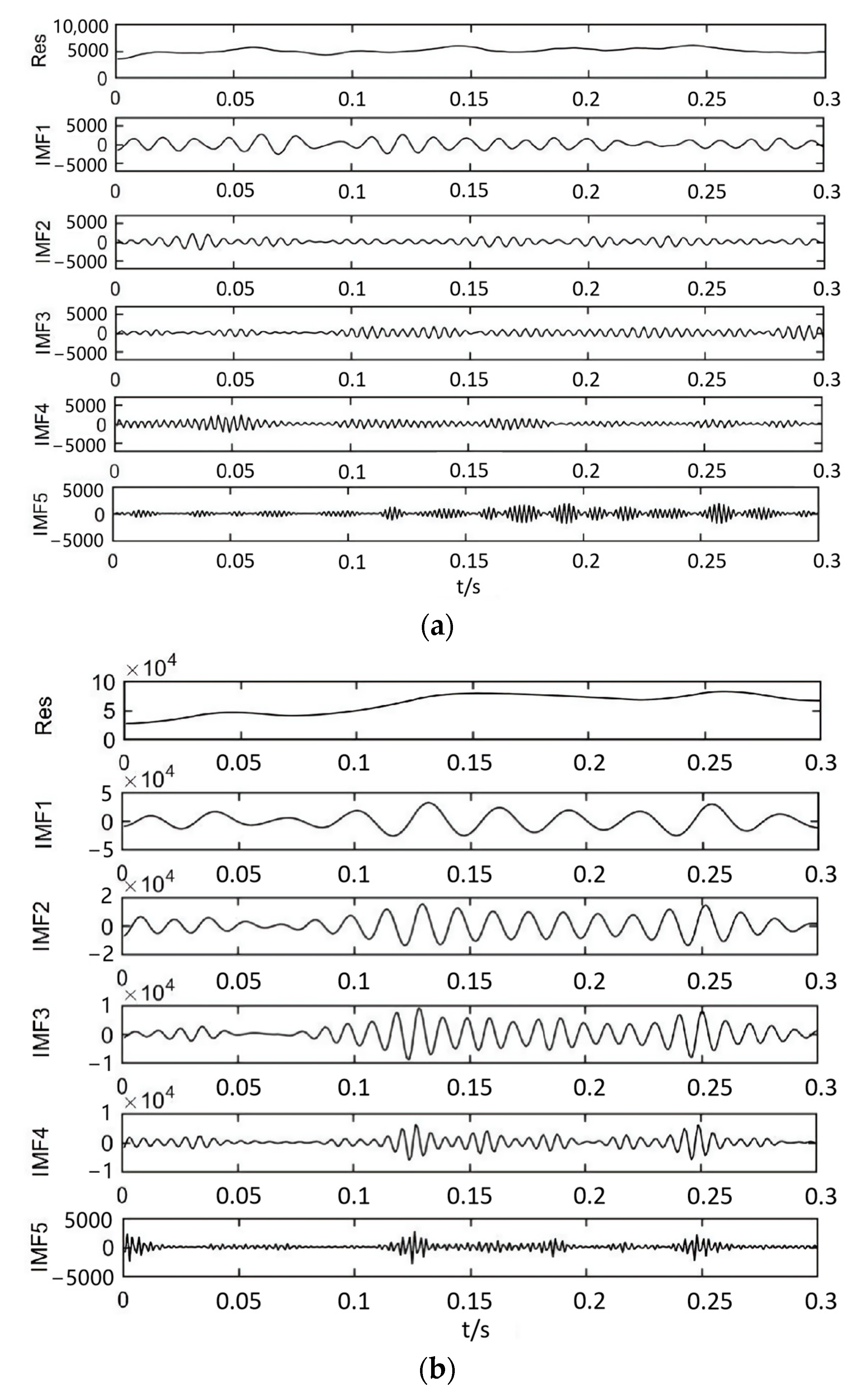
4.1. VMD Decomposition and Feature Extraction
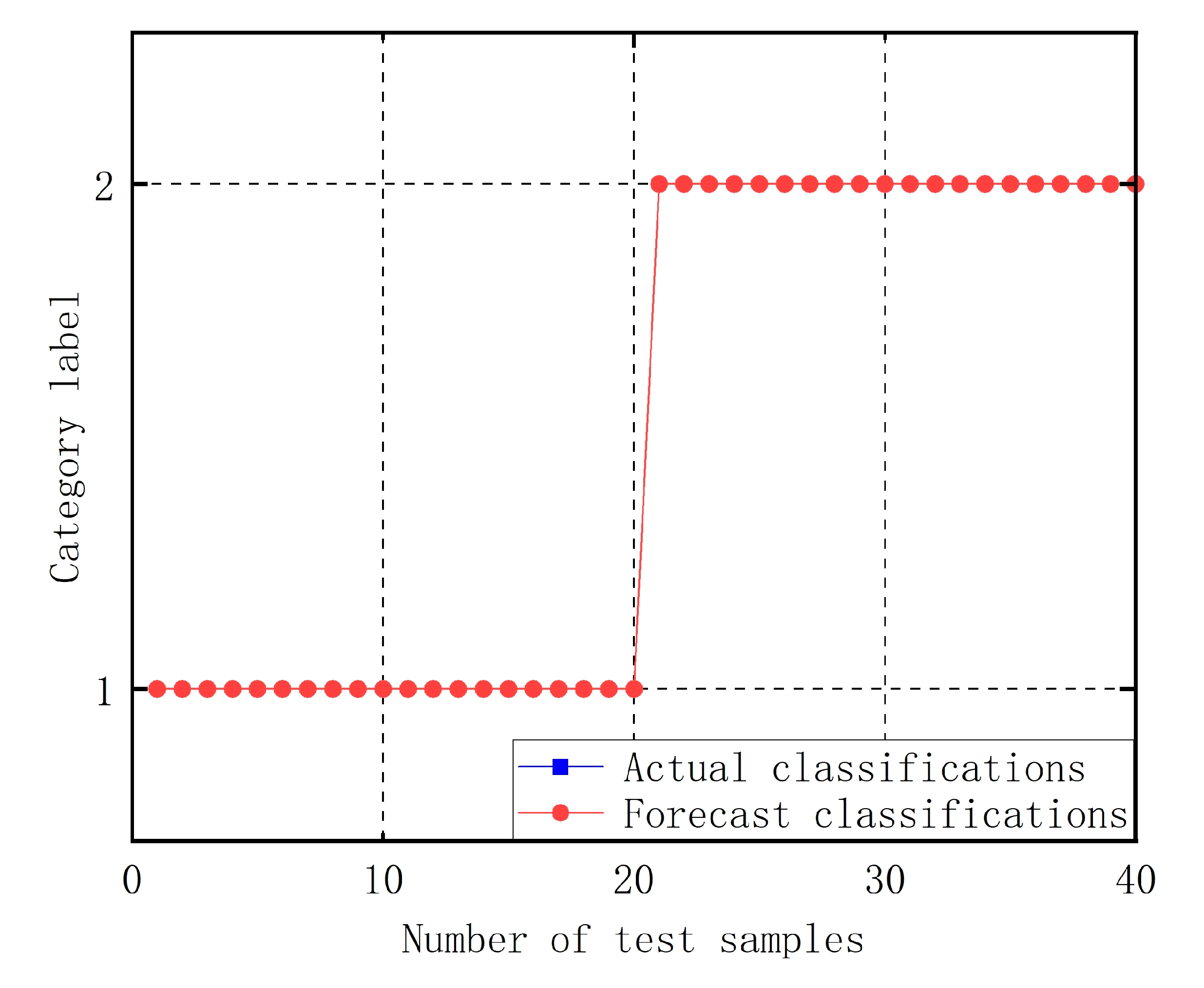
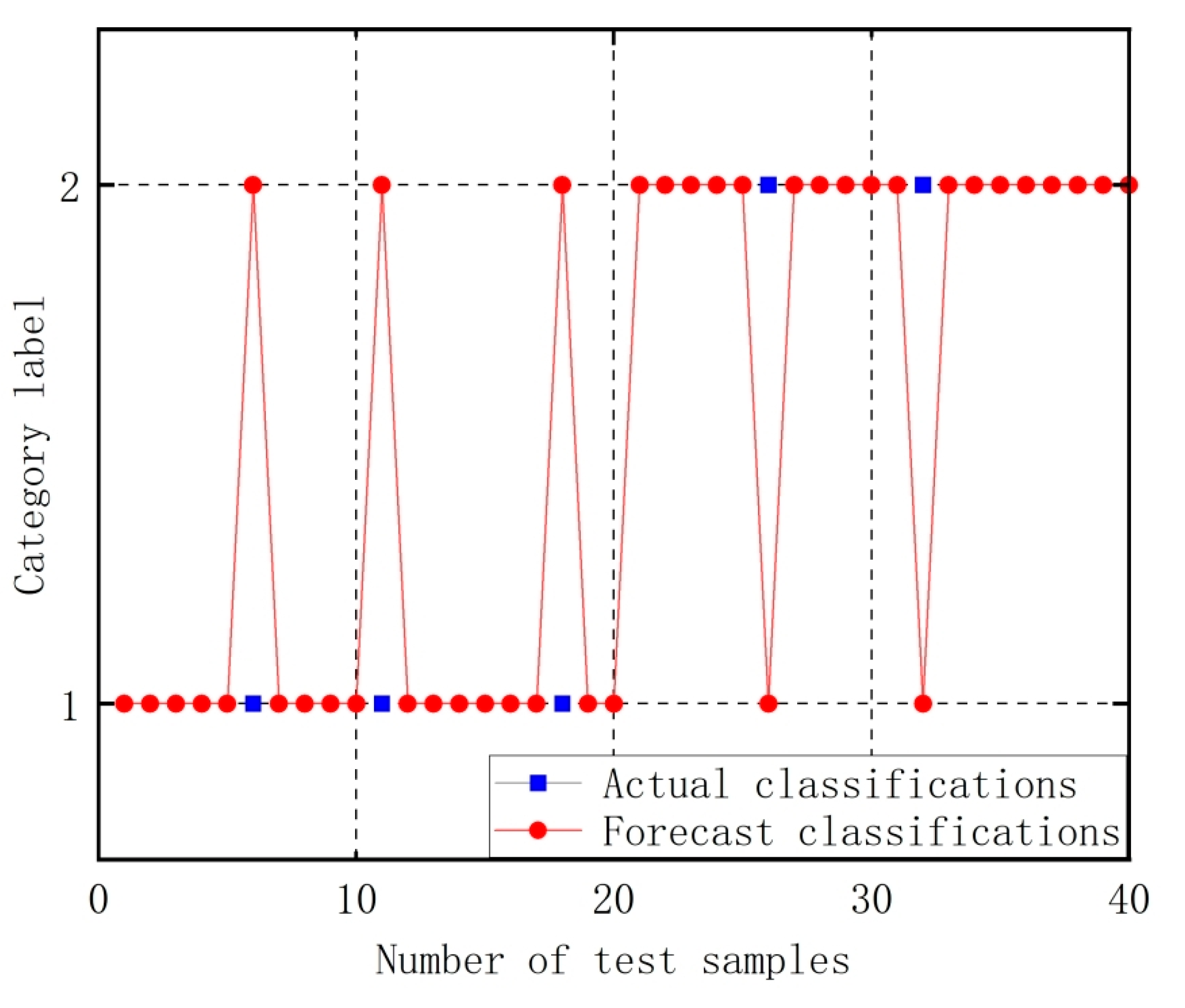
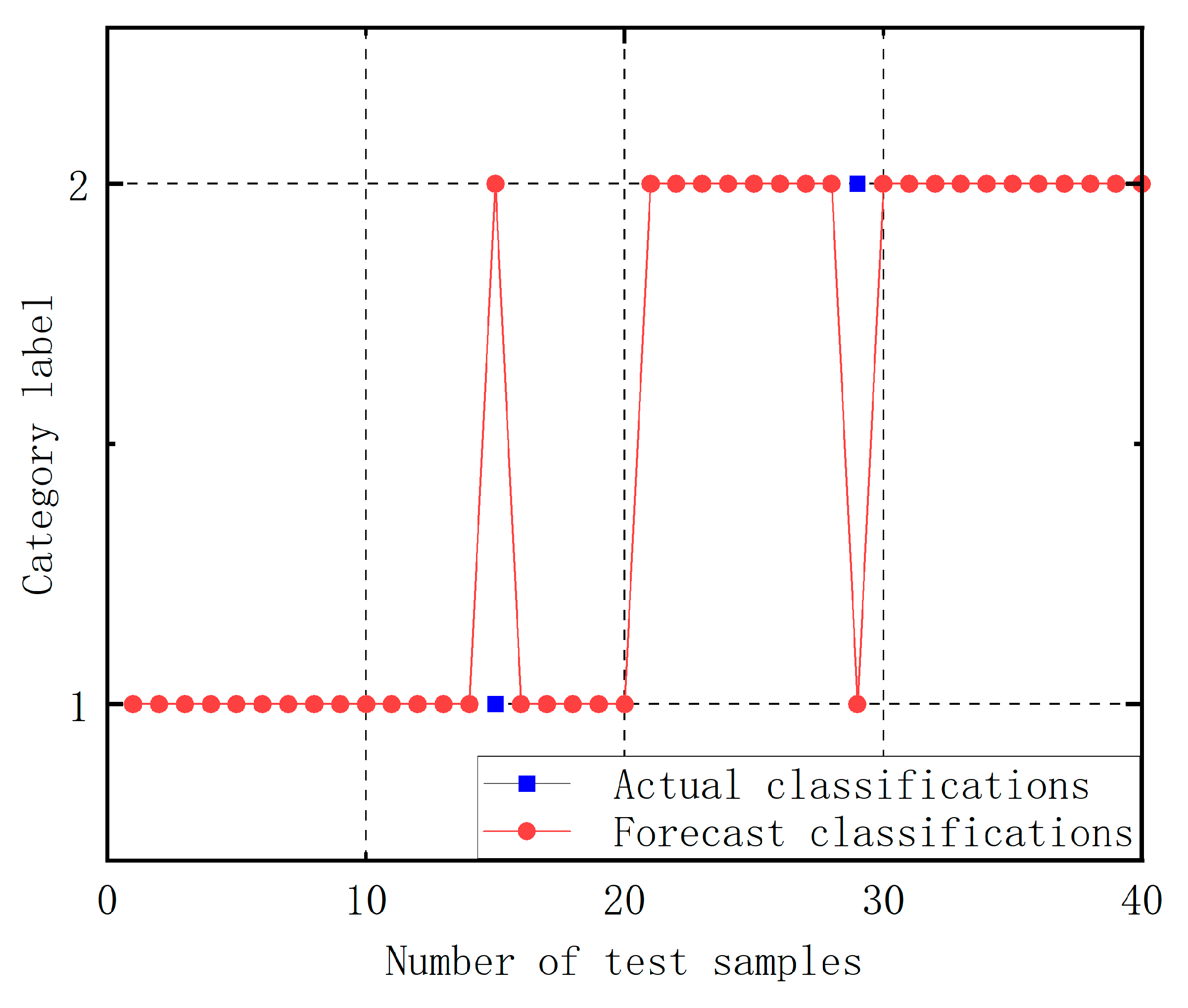
4.2. Fault Identification Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, Z.H.; Zheng, Q.Z.; Sun, T.X.; Huang, Y.H.; Li, H.J. Submarine cable fault location system and method based on optical fiber pulse transmission. Electr. Meas. Instrum. 2020, 57, 24–29+87. [Google Scholar]
- Lv, A.Q.; Li, J. On-line monitoring system of 35 kV 3-coresubmarine power cable based on phi-OTDR. Sens. Actuators A Phys. 2018, 273, 134–139. [Google Scholar] [CrossRef]
- Zhang, X.; Yin, C.Q.; Lv, A.Q. Method of Constructing Finite Element Model and Simulating of Photoelectric Composite Submarine Cable. Comput. Simul. 2013, 30, 120–124+147. [Google Scholar]
- Wang, Y.; Zhou, B.D.; Lin, X.B.; Li, S.Q.; Hu, K.; Lv, A.Q. Anchor Damage Detection of Submarine Power Cable based on Distributed Optical Fiber Vibration Sensing Technology. Study Opt. Commun. 2018, 2, 40–43. [Google Scholar]
- Zhang, Z.P.; Meng, S.X.; Hu, L.X.; Huang, X.Y.; Wang, S.H.; Li, T. Influence of Anchor Damage on Structure Layer of 500 kV Submarine Power Cables. High Volt. Eng. 2020, 46, 561–568. [Google Scholar]
- Shang, Q.F.; Gong, B.; Zheng, G.Q. Analysis of vibration Characteristics of Optical Fiber Composite Submarine Cable under Anchoring. Study Opt. Commun. 2021, 5, 45–49+56. [Google Scholar]
- Zheng, G.Q. Research on the Vibration Signal Analysis Method of Optical Fiber Composite Submarine Cable Based on ESMD and SVM. Master’s Thesis, North China Electric Power University, Beijing, China, June 2021. [Google Scholar]
- Konstantin, D.; Dominique, Z. Variational Mode Decomposition. IEEE Trans Signal Process. 2014, 62, 531–544. [Google Scholar]
- Wei, R.X.; Han, C.Z.; Zhang, Y.Y.; Kong, X.Y.; Song, Z.P. Volterra model method for fault diagnosis of a nonlinear system. J. Syst. Eng. Electron. 2004, 11, 1736–1738+1752. [Google Scholar]
- Zhang, C.; Zhao, R.Z.; Deng, L.F. Weak fault identification of rolling bearings based on VMD singular value entropy. J. Vib. Shock. 2018, 37, 87–91+107. [Google Scholar]
- Fouda, B.M.T.; Yang, B.; Han, D.Z.; An, B.W. Pattern Recognition of Optical Fiber Vibration Signal of the Submarine Cable for Its Safety. IEEE Sens. J. 2021, 21, 6510–6519. [Google Scholar] [CrossRef]
- Jiang, X.X.; Song, Q.Y.; Du, G.F.; Huang, W.G.; Zhu, Z.K. A review on research and application of variational mode decomposition. Chin. J. Sci. Instrum. 2023, 1–24. [Google Scholar]
- Yang, G.Y.; Ding, X.N.; Wang, J.Q.; Wei, Y.D.; Zhou, X.L. Rotor fault diagnosis method of singular value entropy of Volterra modal based on VMD. Manuf. Technol. Mach. Tool 2022, 3, 150–156. [Google Scholar]
- Yang, Y.F. Applications of Empirical Mode Decomposition in Vibration Analysis, 1st ed.; Defense Industry Press: Beijing, China, 2013; pp. 82–98. [Google Scholar]
- Xu, Y.Q.; Zhou, C.; Geng, J.H.; Gao, S.G.; Wang, P. A Method for Diagnosing Mechanical Faults of On-Load Tap Changer Based on Ensemble Empirical Mode Decomposition, Volterra Model and Decision Acyclic Graph Support Vector Machine. IEEE Access 2019, 7, 84803–84816. [Google Scholar] [CrossRef]
- Li, D.Z.; Zheng, X.; Xie, Q.W.; Jin, Q.B. A sequential feature extraction method based on discrete wavelet transform, phase space reconstruction, and singular value decomposition and an improved extreme learning machine for rolling bearing fault diagnosis. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2018, 232, 635–649. [Google Scholar] [CrossRef]
- Yu, T. Research on Identification of Voltage Sag Source Based on IVMD and M-SVM. Master’s Thesis, Liaoning Technical University, Huludao, China, June 2019. [Google Scholar]
- Hu, Y.J. Research on Finite Element model of Optical Fiber Composite Submarine Cable Mechanical Behavior. Master’s Thesis, North China Electric Power University, Beijing, China, March 2018. [Google Scholar]
- Feng, Y.S.; Shang, Q.F.; Lv, A.Q. Dynamic Finite Element Analysis of Fiber-Optic Composite Submarine Cable Under Wave. Study Opt. Commun. 2017, 4, 30–34. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Submarine Cable Status | Sample | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | H |
|---|---|---|---|---|---|---|---|
| Scrubbing | Sample 1 | 2.5037 | 1.1586 | 0.6795 | 0.3894 | 0.1958 | 1.5193 |
| Sample 2 | 2.5023 | 1.1659 | 0.6775 | 0.3954 | 0.1965 | 1.5237 | |
| Sample 3 | 2.5113 | 1.1548 | 0.6804 | 0.3904 | 0.2005 | 1.5272 | |
| Anchor smash | Sample 1 | 2.3902 | 1.0962 | 0.5535 | 0.2973 | 0.1159 | 1.2056 |
| Sample 2 | 2.4037 | 1.0804 | 0.5221 | 0.2932 | 0.1522 | 1.2061 | |
| Sample 3 | 2.3954 | 1.0965 | 0.5361 | 0.2896 | 0.1561 | 1.2105 |
| Hyperparameter | Size | Hyperparameter | Size |
|---|---|---|---|
| Quadratic penalty factor α | 2000 | Convergence parameter ε | 10−7 |
| Lagrange multiplier step τ | 0 | Penalty parameter | 3.568 |
| Number of IMF decomposition K | 5 | Non-negative relaxation factor ζi | 2.248 |
| Confusion Matrix | True Value | |||
|---|---|---|---|---|
| Scrubbing | Anchor Smash | |||
| Predicted Value | VMD | Scrubbing | 20 | 0 |
| Anchor smash | 0 | 20 | ||
| EMD | Scrubbing | 17 | 2 | |
| Anchor smash | 3 | 18 | ||
| EEMD | Scrubbing | 19 | 1 | |
| Anchor smash | 1 | 19 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Fan, C.; Xu, C.; Dong, H.; Guo, J.; Liang, A.; Zhao, L. Anchor Fault Identification Method for High-Voltage DC Submarine Cable Based on VMD-Volterra-SVM. Energies 2023, 16, 3053. https://doi.org/10.3390/en16073053
Zhu W, Fan C, Xu C, Dong H, Guo J, Liang A, Zhao L. Anchor Fault Identification Method for High-Voltage DC Submarine Cable Based on VMD-Volterra-SVM. Energies. 2023; 16(7):3053. https://doi.org/10.3390/en16073053
Chicago/Turabian StyleZhu, Wenwei, Chenyang Fan, Chenghao Xu, Hantuo Dong, Jingen Guo, Aiwu Liang, and Long Zhao. 2023. "Anchor Fault Identification Method for High-Voltage DC Submarine Cable Based on VMD-Volterra-SVM" Energies 16, no. 7: 3053. https://doi.org/10.3390/en16073053