



Dynamic Equivalent Model Considering Multiple Induction Motors for System Frequency Response
 , and
, and
Abstract
:1. Introduction
- A detailed grid model incorporating multiple induction motors is established to imitate the influence of induction motors on grid inertia.
- To address the limitations of the detailed grid model, a dynamic equivalent model is further proposed. Compared with the detailed model, the proposed dynamic equivalent model is structurally simple and does not require the specific parameters of induction motors. Thus, it is possible to apply it to large systems.
- A genetic algorithm-based approach is introduced to identify the parameters of the dynamic equivalent model. Its optimality is guaranteed by an ad hoc approach.
2. Modeling of the Grid with Multiple Induction Motors
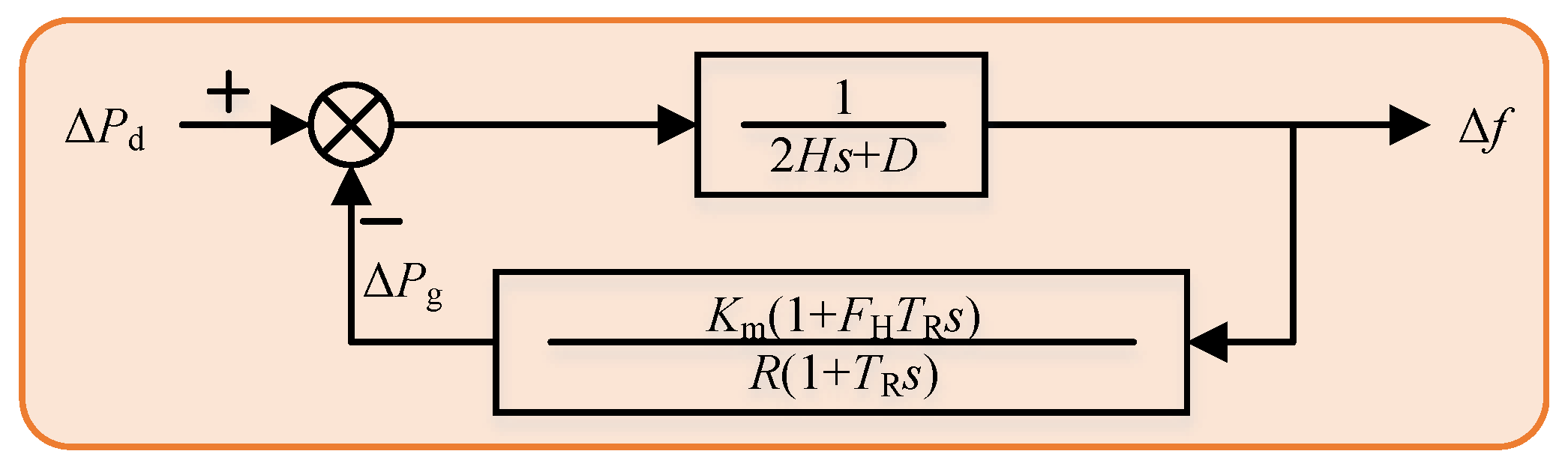
2.1. Low-Order System Frequency Response Model
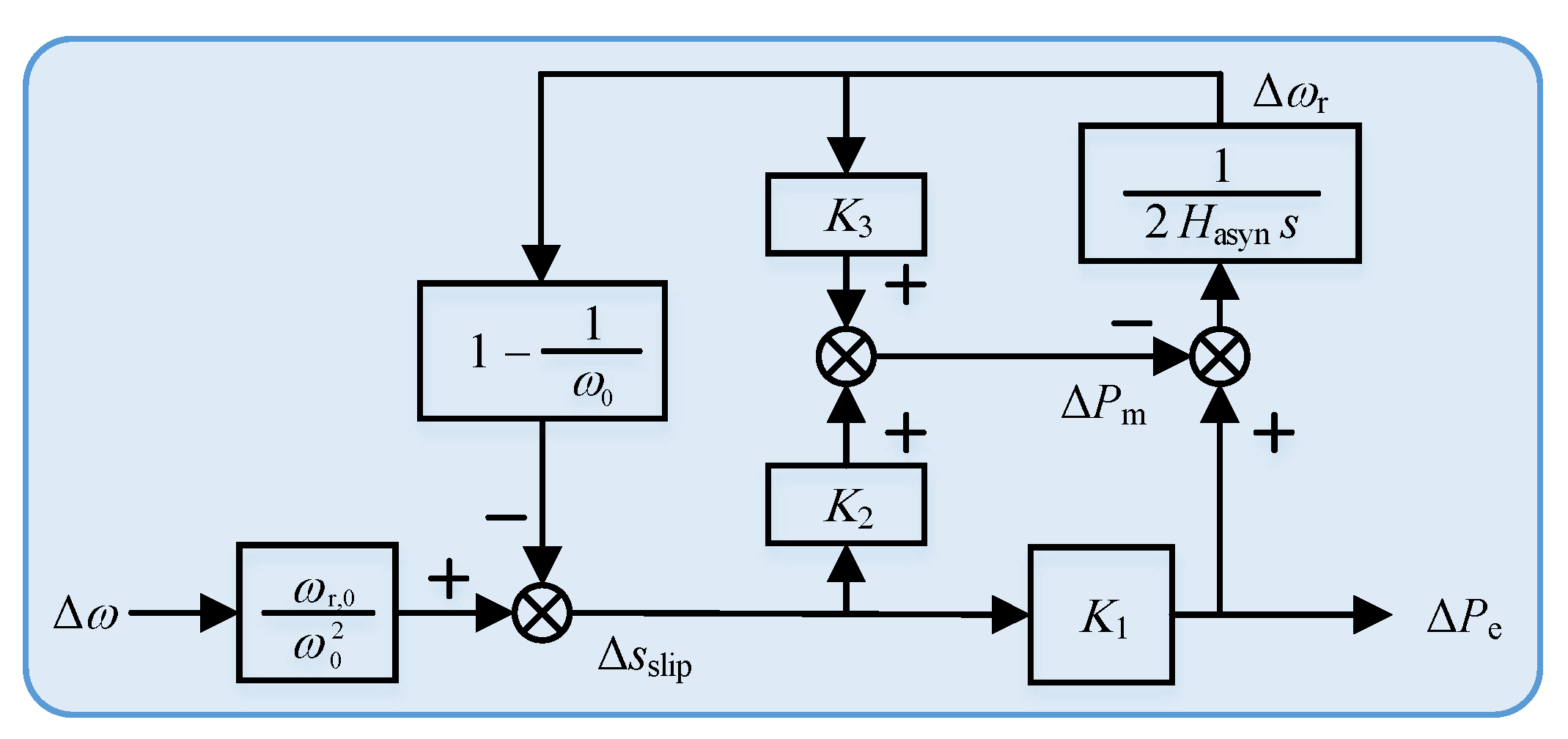
2.2. Induction Motor Model
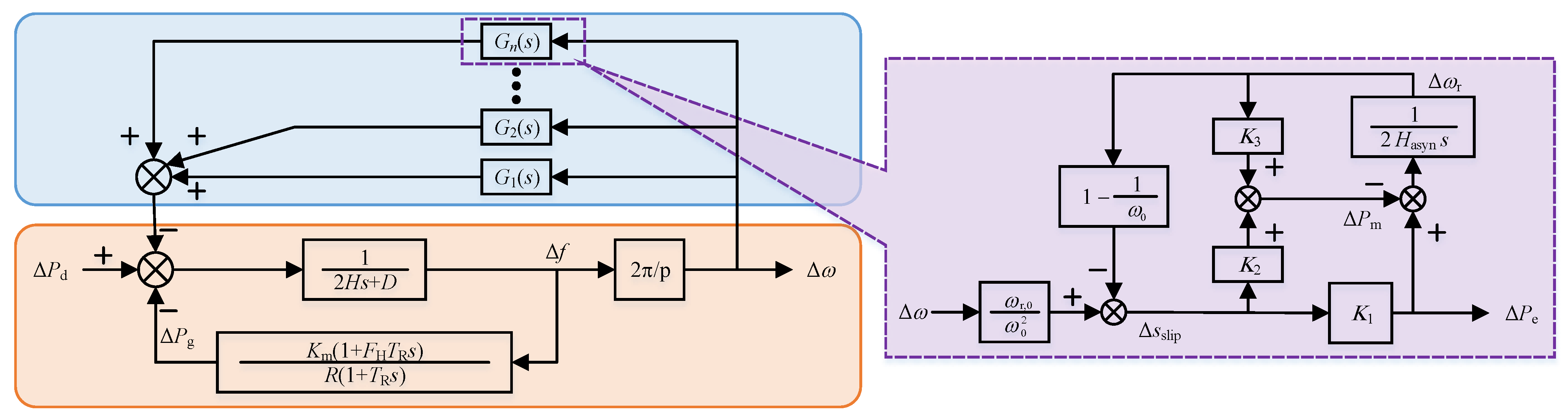
2.3. Detailed Grid Frequency Response Model Considering Multiple Induction Motors
3. Dynamic Equivalent Model of the Grid and Its Identification Approach
3.1. Dynamic Equivalent Model of the Grid Considering Multiple Induction Motors
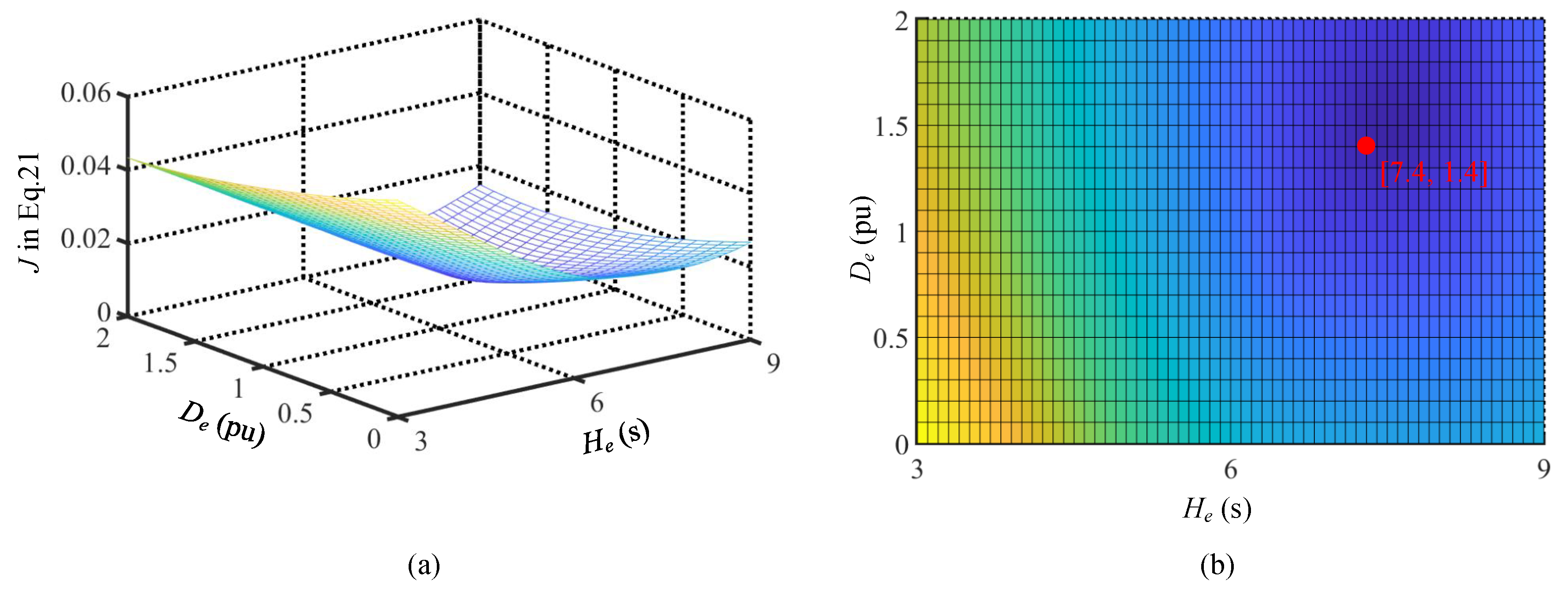
3.2. Formulation of the Optimal Problem
- Objective FunctionAs mentioned before, the aim of the identification approach is to minimize the mismatch between and . In this point of view, the objective function is described asHere, n denotes the sampling point numbers in one scenario and m denotes the simulated scenarios numbers.
- ConstraintsThe identified equivalent and should also be limited within a feasible range. In general, the grid inertia constant is 3~9 s and the grid damping coefficient is 0~2, which can be represented as [28]
3.3. Solution of the Optimal Problem

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Description |
|---|---|
| Step 1 | Initialize the population: In the initialization phase, individuals are created to form the initial population. Each individual is an -bit Gray encoding of a vector . In other words, each individual denotes a feasible solution to the optimal problem (19) and (20). |
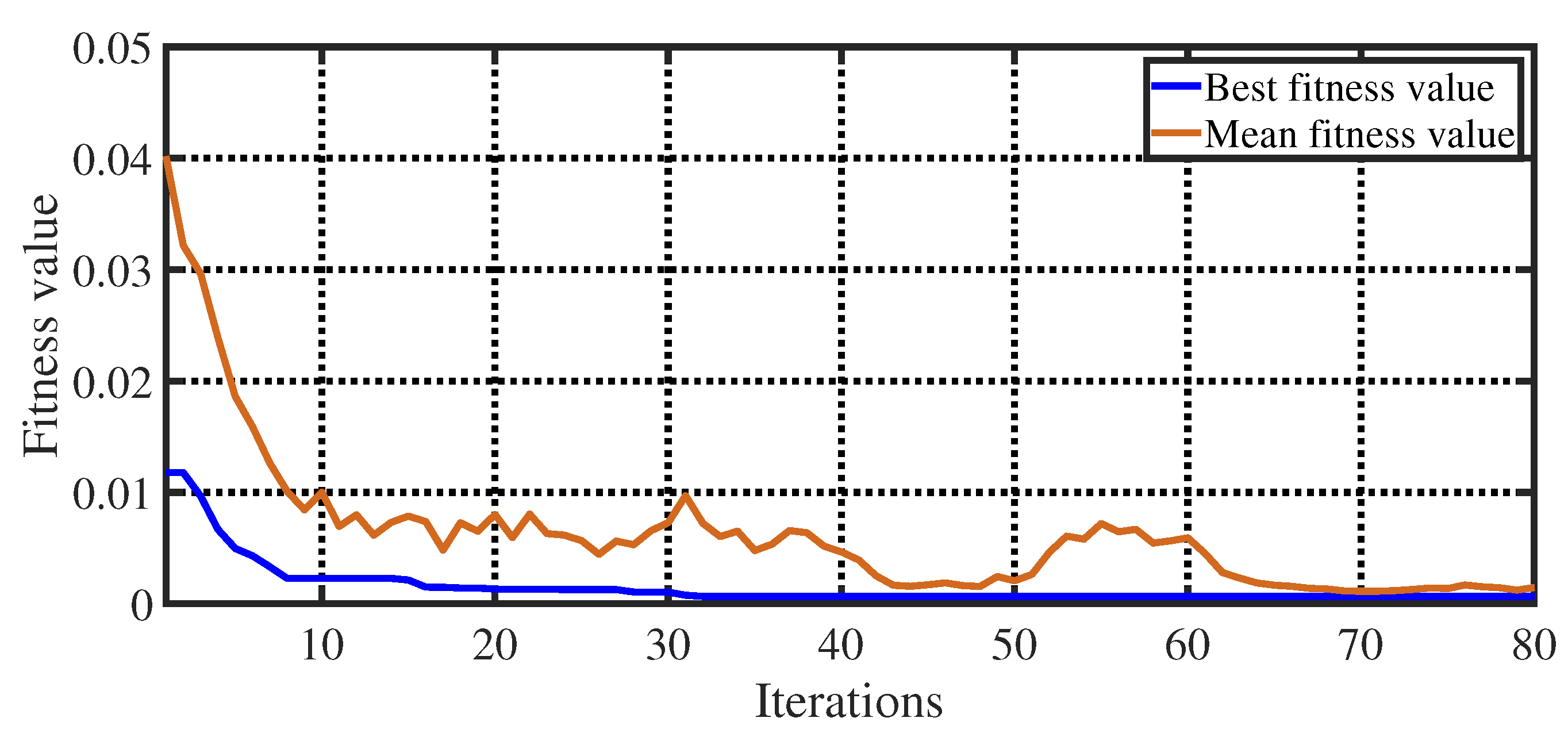
| Step 2 | Calculate fitness value: The main objective of the data-driven-based identification approach is to minimize the mismatch between and . As a result, for k-th individual, its fitness value can be calculated by . Correspondingly, the average fitness value of the whole population can be represented as . |
| Step 3 | Generate the new population by selection, crossover, and mutation.
|
| Step 4 | Termination criterion: The iteration is stopped as soon as any one of these two condition is met. Otherwise, the algorithm goes back to Step 2.
|
3.4. Performance Evaluation of the Grid Model Considering Multiple Induction Motors
4. Simulation Studies
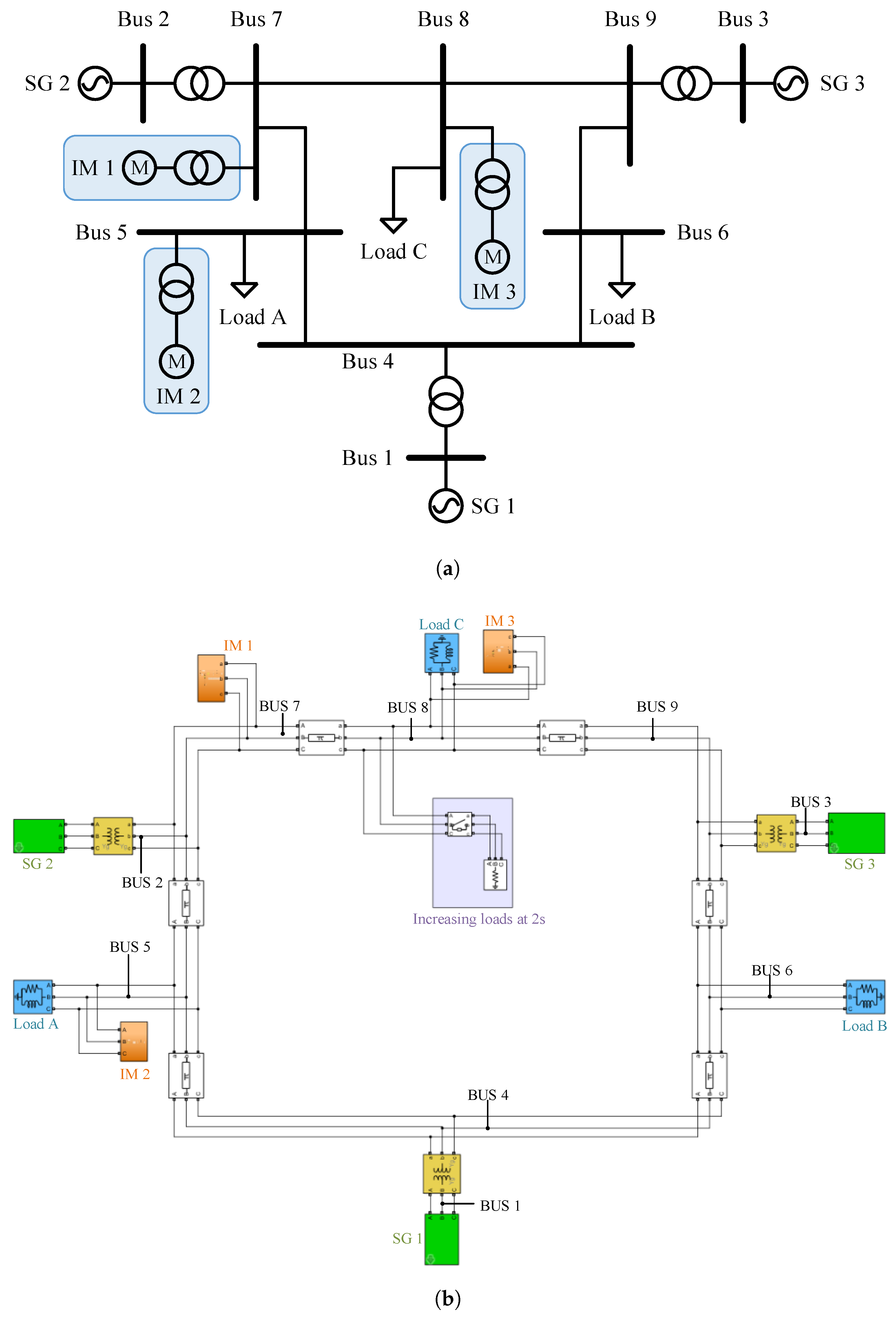
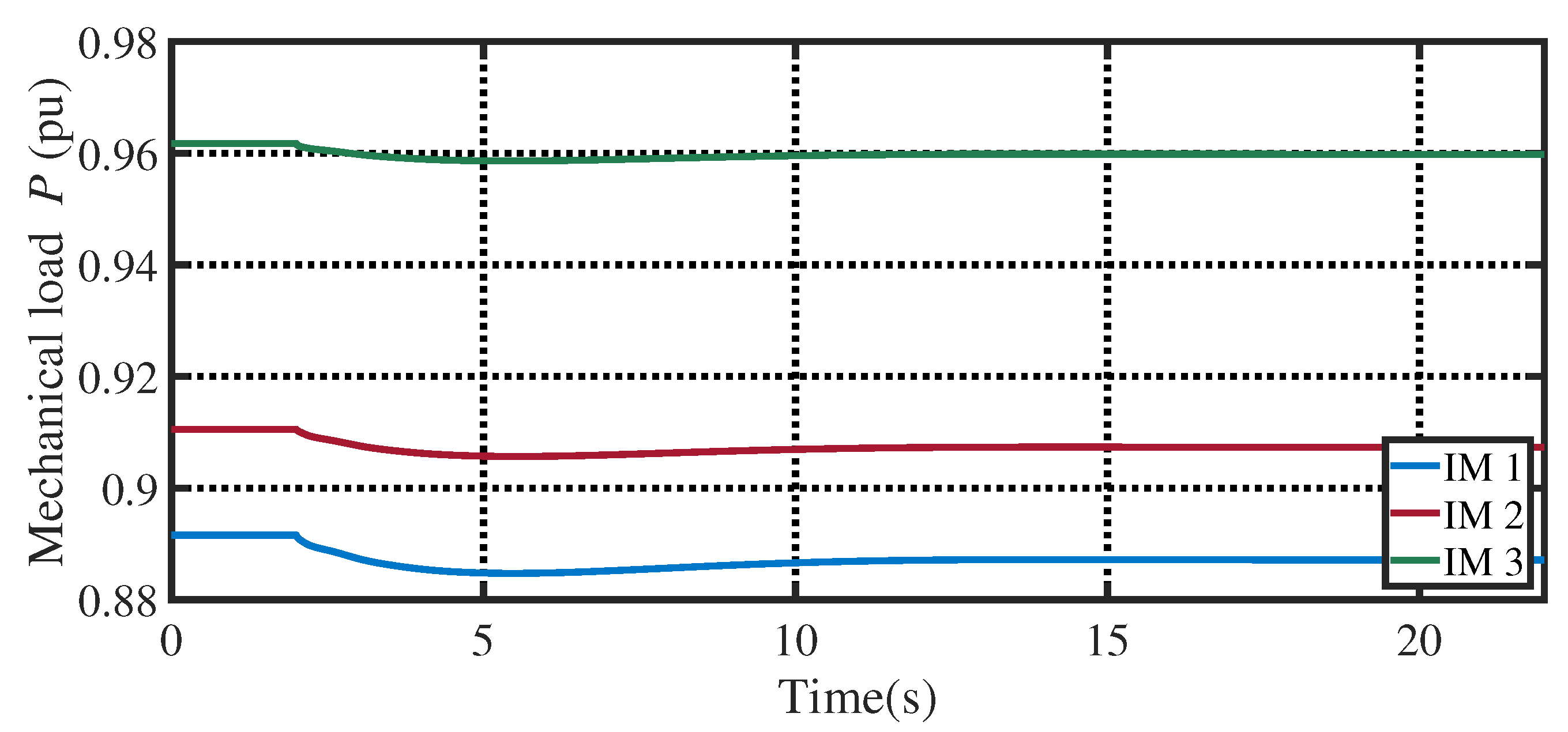
- Modified IEEE 9-bus system: The modified IEEE 9-bus system is implemented in MATLAB Simulink using the Special Power Systems library, whose block diagram is shown in Figure 7. It is the modified version of the actual IEEE 9-bus system. In the modified system, there are three synchronous generators, that is, SG 1, SG 2, and SG 3, on the generation-side. All of them are connected to the grid via transformers. The parameters of these three synchronous generators are presented in Table A1. On the consumption-side, three constant loads, i.e., Load A, Load B, and Load C, are connected to the grid, and whose parameters are listed in Table A2. Moreover, three induction motors, that is, IM 1, IM 2, and IM 3, are also integrated into the grid on Bus 7, Bus 5, and Bus 8, respectively. Considering that the induction motors are predominantly employed in high energy consumption enterprises, where they are either in operation or planned to be stopped, the operation conditions of these three induction motors are assumed unchanged, that is, they always work near the initial operation point. The parameters of the induction motors, transformers, and transmission lines are shown in Table A3, Table A4 and Table A5, respectively.
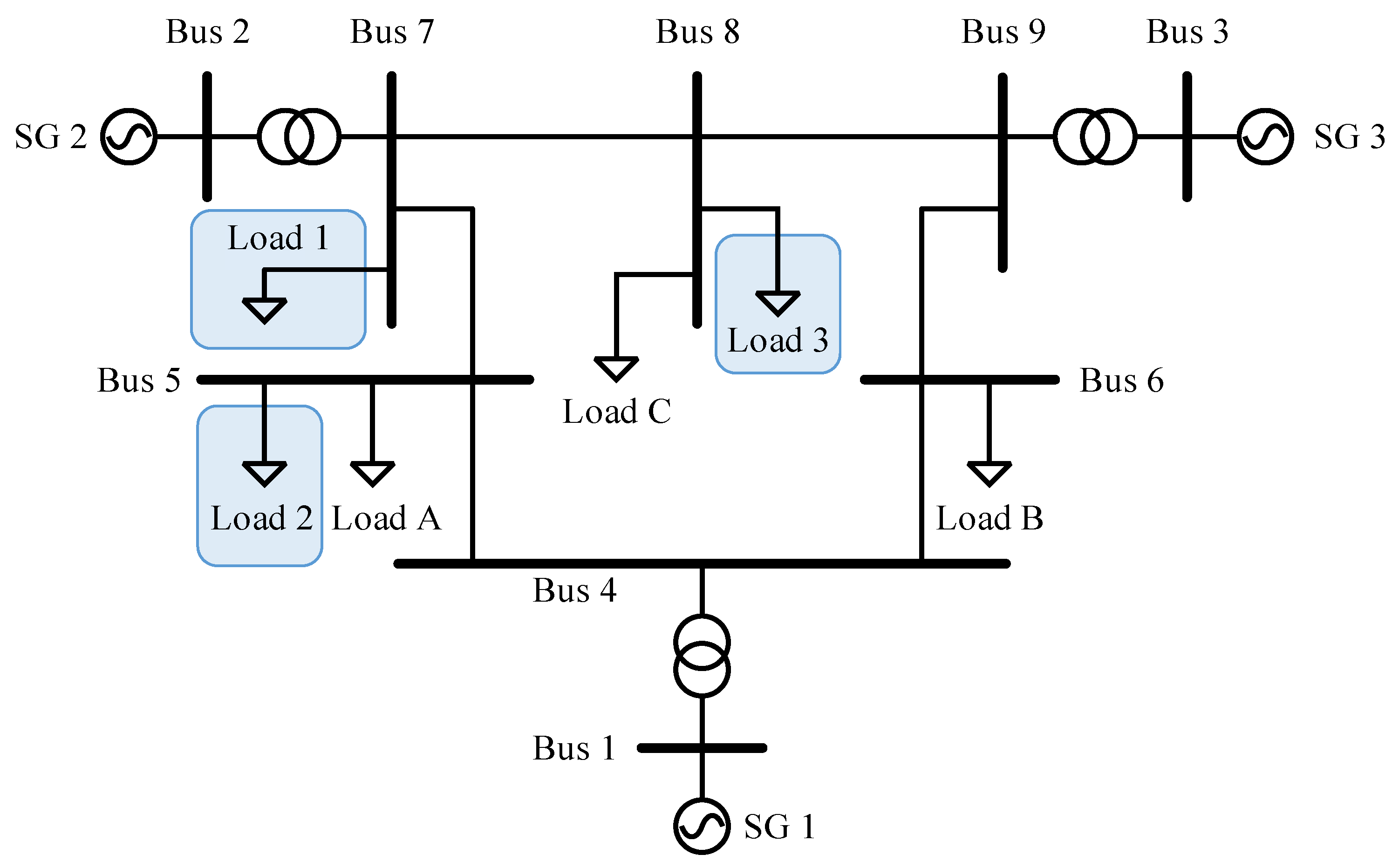
- Benchmark IEEE 9-bus system: The benchmark IEEE 9-bus system is derived from the above modified IEEE 9-bus system, whose block diagram is shown in Figure 8. The benchmark IEEE 9-bus system is also implemented in MATLAB Simulink using the Special Power Systems library. The only difference between these two systems is that in the benchmark system, the induction motors are replaced with the equal capacity constant loads. Specifically, IM 1, IM 2, and IM3 are replaced with Load 1, Load 2, and Load 3, respectively, whose parameters are listed in Table A6.
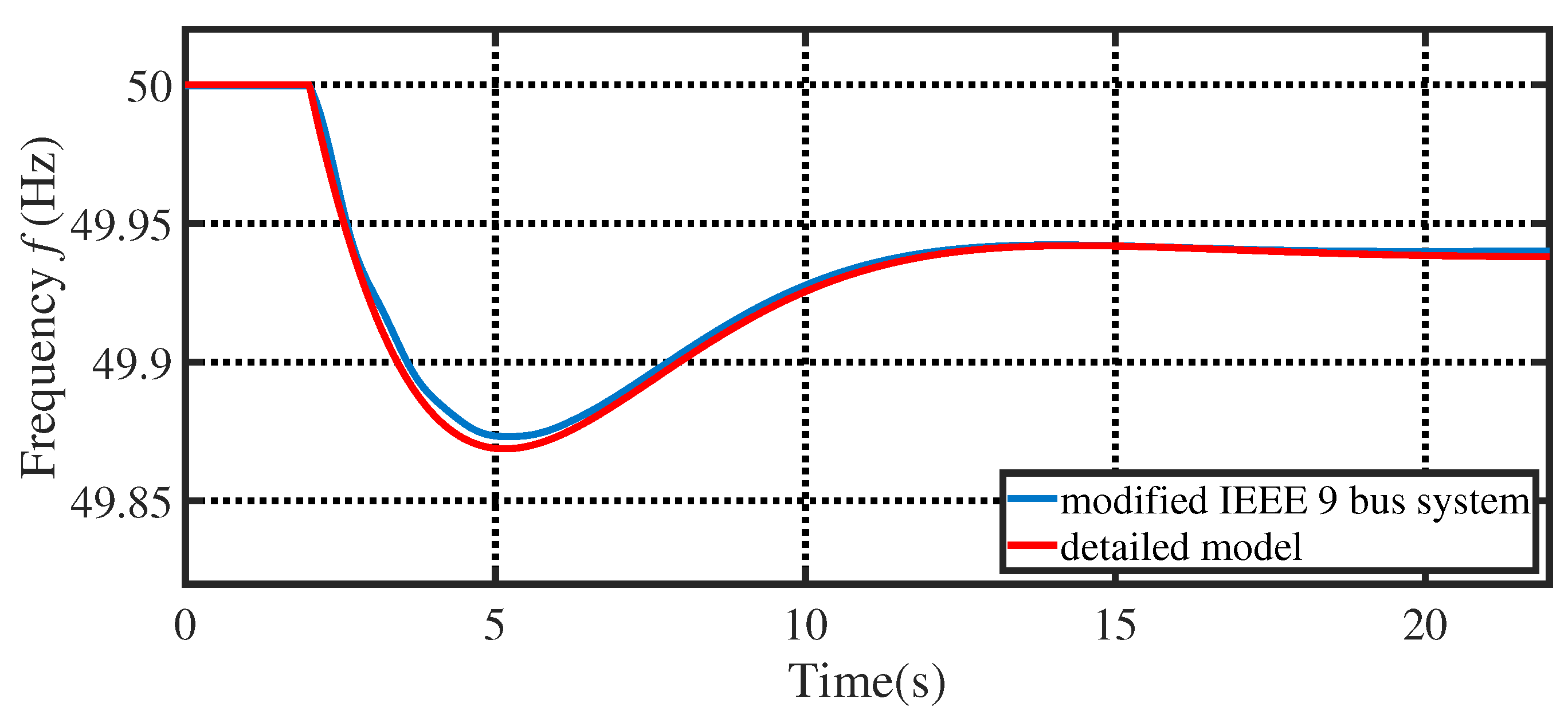
- Detailed model: The detailed model is proposed in Section 2.3, whose block diagram is shown in Figure 5. This model is also implemented in the MATLAB Simulink platform.
- Dynamic equivalent model: The dynamic equivalent model is proposed in Section 3.1, whose block diagram is shown in Figure 6. This model and its identification approach are implemented using MATLAB scripts.
- Benchmark model: The benchmark model is proposed in [21]. In this model, only an aggregated induction model is used to emulate the influence of induction motors on the grid frequency dynamics.
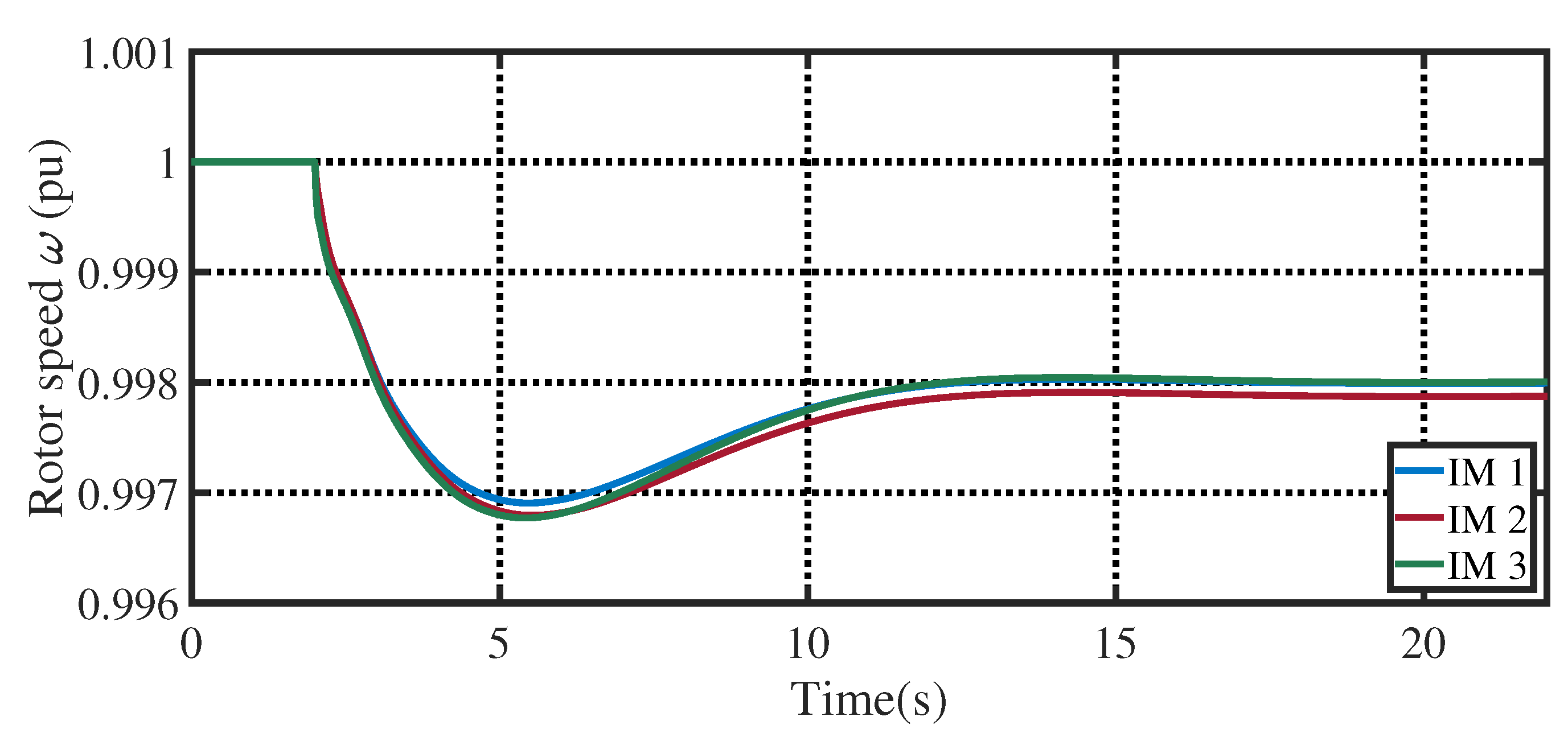
4.1. Influence of the Induction Motors on Grid Frequency Dynamics
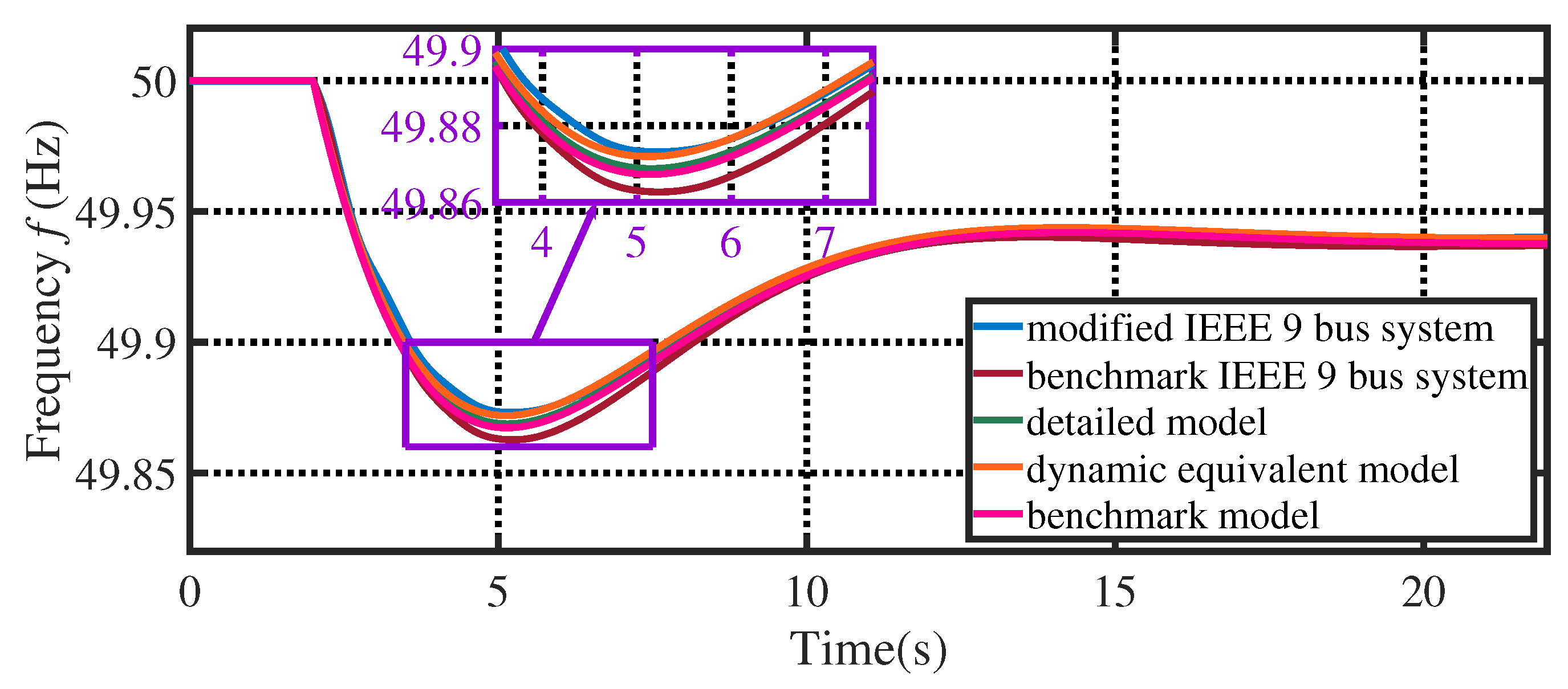
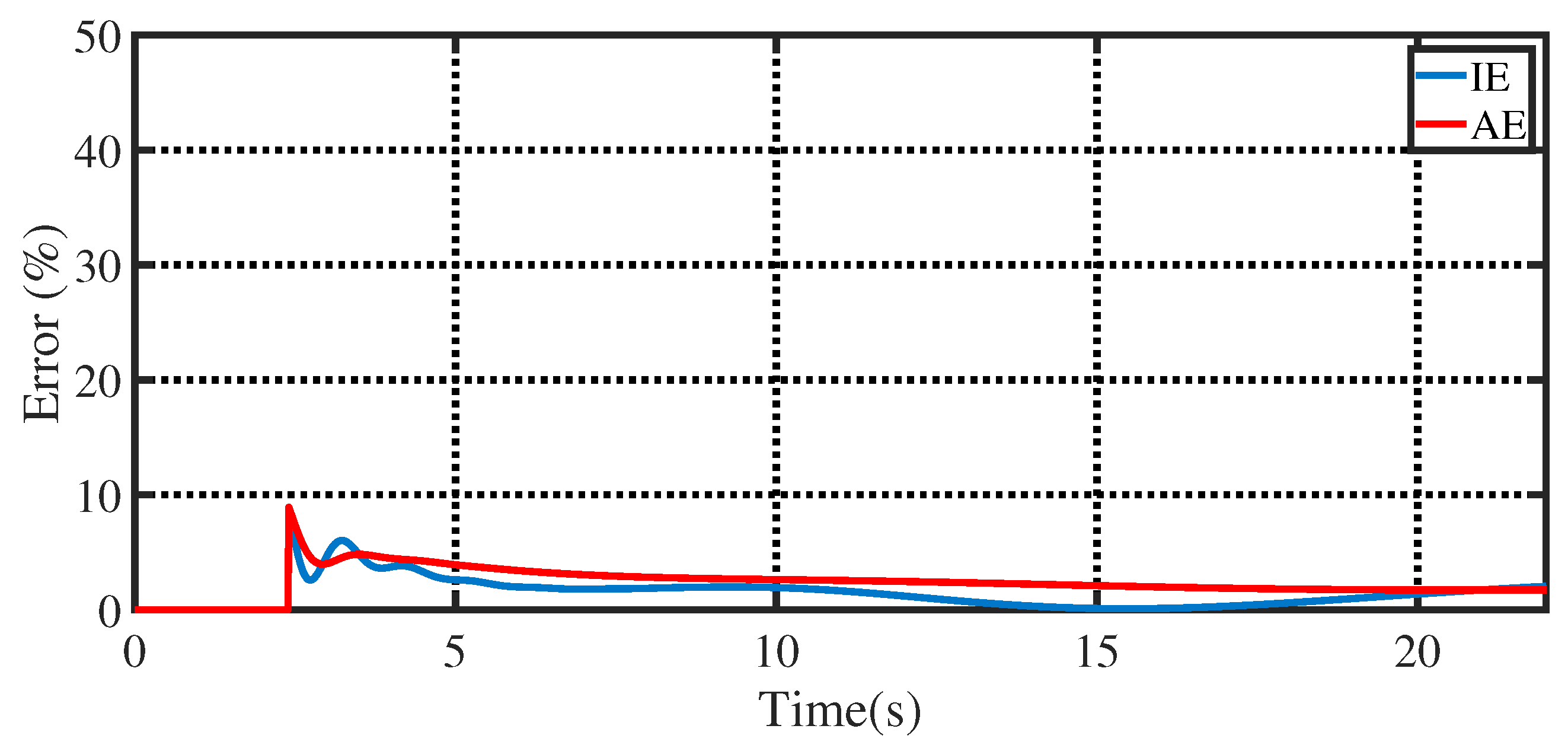
4.2. Accuracy of the Detailed Grid Frequency Response Model Considering Multiple Induction Motors
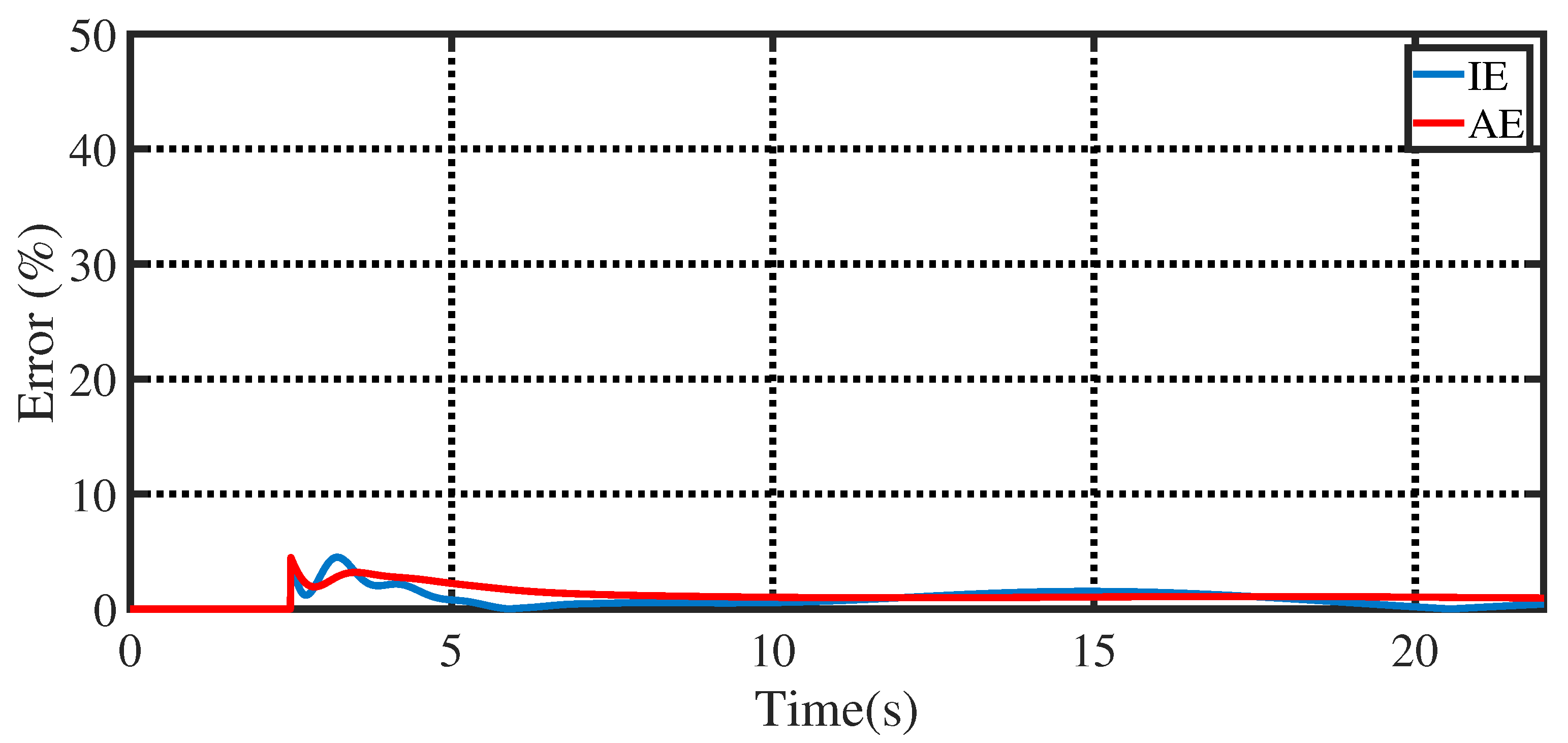
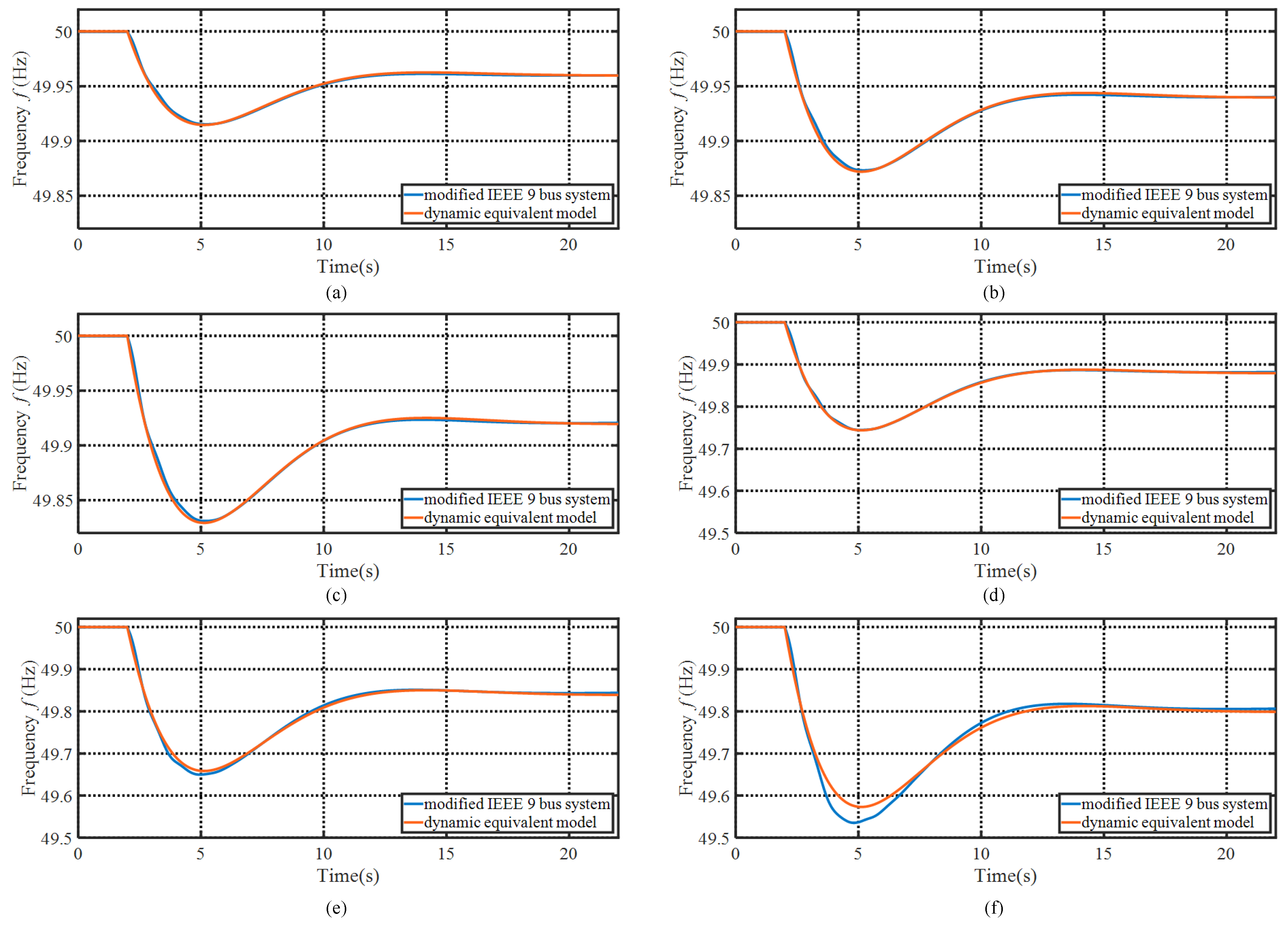
4.3. Dynamic Equivalent Model Identification and Its Accuracy
4.4. Influence of the Grid Load Disturbance on the Dynamic Equivalent Model Accuracy
5. Conclusions
- A detailed grid model incorporating multiple induction motors is established to imitate the influence of induction motors on grid inertia.
- To address the limitations of the detailed grid model, a dynamic equivalent model is further proposed. Compared with the detailed model, the proposed dynamic equivalent model is structurally simple and does not require the specific parameters of induction motors. So it is possible to be applied to large systems.
- A genetic algorithm-based approach is introduced to identify the parameters of the dynamic equivalent model. Its optimality is guaranteed by an ad hoc approach.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Parameters | SG 1 | SG 2 | SG 3 |
|---|---|---|---|
| Rated power (MVA) | 250 | 220 | 128 |
| Line-to-line voltage V (kV) | 16.5 | 18 | 13.8 |
| Rated frequency (Hz) | 50 | 50 | 50 |
| Inertia coefficient H (s) | 6 | 6 | 6 |
| Stator resistance (pu) | 0.004 | 0.004 | 0.004 |
| d axis reactance (pu) | 1.7, 0.27, 0.2 | 1.7, 0.27, 0.2 | 1.7, 0.27, 0.2 |
| q axis reactance (pu) | 1.65, 0.47, 0.2 | 1.65, 0.47, 0.2 | 1.65, 0.47, 0.2 |
| Parameters | Load A | Load B | Load C |
|---|---|---|---|
| Rated active power (MW) | 125 | 90 | 100 |
| Rated reactive power (MVar) | 50 | 30 | 35 |
| Parameters | IM 1 | IM 2 | IM 3 |
|---|---|---|---|
| Rated power (MVA) | 35 | 32 | 18 |
| Rated frequency (Hz) | 50 | 50 | 50 |
| Stator resistance and inductance (pu) | 0.020, 0.040 | 0.014, 0.035 | 0.022, 0.043 |
| Rotor resistance and inductance (pu) | 0.019, 0.040 | 0.017, 0.036 | 0.021, 0.042 |
| Mechanical loads (pu) | |||
| Mechanical loads type | constant-power load and pump load | constant-torque load, constant-power load and pump load | constant-torque load |
| Location | Nominal Power (MVA) | Nominal Frequency (Hz) | Winding 1 Parameters [R1(pu), L1(pu)] | Winding 2 Parameters [R2(pu), L2(pu)] |
|---|---|---|---|---|
| Bus 1–Bus 4 | 250 | 50 | [0, 0.15] | [0, 0.15] |
| Bus 2–Bus 7 | 220 | 50 | [0.15, 0] | [0.15, 0.05] |
| Bus 3–Bus 9 | 150 | 50 | [0, 0] | [0, 0.15] |
| Location | Length | Resistances (Ohms/km) | Inductances (mH/km) | Capacitances (uF/km) |
|---|---|---|---|---|
| Bus 4–Bus 5 | 1 | 6.75 | 54.7 | 0.31 |
| Bus 4–Bus 6 | 1 | 6.75 | 54.7 | 0.31 |
| Bus 5–Bus 7 | 1 | 6.75 | 54.7 | 0.31 |
| Bus 6–Bus 9 | 1 | 6.75 | 54.7 | 0.31 |
| Bus 7–Bus 8 | 1 | 6.75 | 54.7 | 0.31 |
| Bus 8–Bus 9 | 1 | 6.75 | 54.7 | 0.31 |
| Parameters | Load 1 | Load 2 | Load 3 |
|---|---|---|---|
| Rated active power (MW) | 35 | 32 | 18 |
References
- Qi, J.; Liu, L.; Shen, Z.; Xu, B.; Leung, K.S.; Sun, Y. Low-carbon community adaptive energy management optimization toward smart services. IEEE Trans. Ind. Inform. 2019, 16, 3587–3596. [Google Scholar] [CrossRef]
- Alotaibi, I.; Abido, M.A.; Khalid, M.; Savkin, A.V. A comprehensive review of recent advances in smart grids: A sustainable future with renewable energy resources. Energies 2020, 13, 6269. [Google Scholar] [CrossRef]
- Kalantar-Neyestanaki, M.; Cherkaoui, R. Coordinating distributed energy resources and utility-scale battery energy storage system for power flexibility provision under uncertainty. IEEE Trans. Sustain. Energy 2021, 12, 1853–1863. [Google Scholar] [CrossRef]
- Muttaqi, K.M.; Islam, M.R.; Sutanto, D. Future power distribution grids: Integration of renewable energy, energy storage, electric vehicles, superconductor, and magnetic bus. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Zuo, K.; Wu, L. Enhanced Power and Energy Coordination for Batteries Under the Real-Time Closed-Loop, Distributed Microgrid Control. IEEE Trans. Sustain. Energy 2022, 13, 2027–2040. [Google Scholar] [CrossRef]
- Muttaqi, K.M.; Sutanto, D. Adaptive and predictive energy management strategy for real-time optimal power dispatch from vpps integrated with renewable energy and energy storage. IEEE Trans. Ind. Appl. 2021, 57, 1958–1972. [Google Scholar]
- Global Wind Energy Council. GWEC Global Wind Report 2022; Global Wind Energy Council: Brussels, Belgium, 2022. [Google Scholar]
- Xiao, Y.; Wang, X.; Wang, X. A modified intra-day market to trade updated forecast information for wind power integration. IEEE Trans. Sustain. Energy 2020, 12, 1044–1059. [Google Scholar] [CrossRef]
- Worku, M.Y.; Hassan, M.A.; Abido, M.A. Real time energy management and control of renewable energy based microgrid in grid connected and island modes. Energies 2019, 12, 276. [Google Scholar] [CrossRef]
- Fjellstedt, C.; Ullah, M.I.; Forslund, J.; Jonasson, E.; Temiz, I.; Thomas, K. A Review of AC and DC Collection Grids for Offshore Renewable Energy with a Qualitative Evaluation for Marine Energy Resources. Energies 2022, 15, 5816. [Google Scholar] [CrossRef]
- Lunardi, A.; Normandia Lourenço, L.F.; Munkhchuluun, E.; Meegahapola, L.; Sguarezi Filho, A.J. Grid-Connected Power Converters: An Overview of Control Strategies for Renewable Energy. Energies 2022, 15, 4151. [Google Scholar] [CrossRef]
- Xue, S.M.; Liu, C. Line-to-line fault analysis and location in a VSC-based low-voltage DC distribution network. Energies 2018, 11, 536. [Google Scholar] [CrossRef]
- Hu, Q.; Han, R.; Quan, X.; Wu, Z.; Tang, C.; Li, W.; Wang, W. Grid-forming inverter enabled virtual power plants with inertia support capability. IEEE Trans. Smart Grid 2022, 13, 4134–4143. [Google Scholar] [CrossRef]
- Li, C.; Yang, Y.; Cao, Y.; Aleshina, A.; Xu, J.; Blaabjerg, F. Grid inertia and damping support enabled by proposed virtual inductance control for grid-forming virtual synchronous generator. IEEE Trans. Power Electron. 2022, 38, 294–303. [Google Scholar] [CrossRef]
- Sockeel, N.; Gafford, J.; Papari, B.; Mazzola, M. Virtual inertia emulator-based model predictive control for grid frequency regulation considering high penetration of inverter-based energy storage system. IEEE Trans. Sustain. Energy 2020, 11, 2932–2939. [Google Scholar] [CrossRef]
- Qi, Y.; Deng, H.; Liu, X.; Tang, Y. Synthetic inertia control of grid-connected inverter considering the synchronization dynamics. IEEE Trans. Power Electron. 2021, 37, 1411–1421. [Google Scholar] [CrossRef]
- Björk, J.; Johansson, K.H.; Dörfler, F. Dynamic virtual power plant design for fast frequency reserves: Coordinating hydro and wind. IEEE Trans. Control. Netw. Syst. 2022. [Google Scholar] [CrossRef]
- Basak, R.; Bhuvaneswari, G.; Pillai, R.R. Low-voltage ride-through of a synchronous generator-based variable speed grid-interfaced wind energy conversion system. IEEE Trans. Ind. Appl. 2019, 56, 752–762. [Google Scholar] [CrossRef]
- Kabsha, M.; Rather, Z.H. A new control scheme for fast frequency support from HVDC connected offshore wind farm in low-inertia system. IEEE Trans. Sustain. Energy 2019, 11, 1829–1837. [Google Scholar] [CrossRef]
- Manaz, M.M.; Lu, C.N. Design of resonance damper for wind energy conversion system providing frequency support service to low inertia power systems. IEEE Trans. Power Syst. 2020, 35, 4297–4306. [Google Scholar] [CrossRef]
- Zhou, T.; Liu, Z.; Ye, H.; Ren, B.; Xu, Y.; Liu, Y. Frequency response modeling and equivalent inertial estimation of induction machine. Energy Rep. 2022, 8, 554–564. [Google Scholar] [CrossRef]
- Chen, L.; Wang, X.; Min, Y.; Li, G.; Wang, L.; Qi, J.; Xu, F. Modelling and investigating the impact of asynchronous inertia of induction motor on power system frequency response. Int. J. Electr. Power Energy Syst. 2020, 117, 105708. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, X.; Zhang, M. Power-balancing based induction machine model for power system dynamic analysis in electromechanical timescale. Energies 2018, 11, 438. [Google Scholar] [CrossRef]
- Hu, Y.L.; Wu, Y.K. Inertial Response Identification Algorithm for the Development of Dynamic Equivalent Model of DFIG-Based Wind Power Plant. IEEE Trans. Ind. Appl. 2021, 57, 2104–2113. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, N.; Wang, Y.; Yang, J.; Kang, C. Data-driven power flow linearization: A regression approach. IEEE Trans. Smart Grid 2018, 10, 2569–2580. [Google Scholar] [CrossRef]
- Zheng, K.; Chen, Q.; Wang, Y.; Kang, C.; Xia, Q. A novel combined data-driven approach for electricity theft detection. IEEE Trans. Ind. Inform. 2018, 15, 1809–1819. [Google Scholar] [CrossRef]
- Jiang, T.; Mu, Y.; Jia, H.; Lu, N.; Yuan, H.; Yan, J.; Li, W. A novel dominant mode estimation method for analyzing inter-area oscillation in China southern power grid. IEEE Trans. Smart Grid 2016, 7, 2549–2560. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Ulbig, A.; Rinke, T.; Chatzivasileiadis, S.; Andersson, G. Predictive control for real-time frequency regulation and rotational inertia provision in power systems. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2946–2953. [Google Scholar]
- Zhang, Z.; Kou, P.; Zhang, Y.; Liang, D. Distributed model predictive control of all-dc offshore wind farm for short-term frequency support. IET Renew. Power Gener. 2022, 14, 458–479. [Google Scholar] [CrossRef]


















| Description | Types | ||
|---|---|---|---|
| 0 | / | , i.e., , is constant. | constant-torque load |
| −1 | 0 | is constant | constant-power load |
| 1 | 0 | pump load |
| Detailed Model | Dynamic Equivalent Model | |||
|---|---|---|---|---|
| Parameter | D | |||
| Value | 6.76 | 0.75 | 7.4230 | 1.4070 |
| Method | GA-Based Identification Method Proposed in Section 3 | Ad Hoc Method Introduced in Remark 1 |
|---|---|---|
| Computational cost (s) | 17.3 | 108.0 |
| Best fitting (s) | 7.4230 | 7.4 |
| Best fitting (pu) | 1.4070 | 1.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Z.; Mu, G.; Pan, J.; Xue, Z.; Yang, H.; Mei, M.; Zhang, Z.; Kou, P. Dynamic Equivalent Model Considering Multiple Induction Motors for System Frequency Response. Energies 2023, 16, 2987. https://doi.org/10.3390/en16072987
Tang Z, Mu G, Pan J, Xue Z, Yang H, Mei M, Zhang Z, Kou P. Dynamic Equivalent Model Considering Multiple Induction Motors for System Frequency Response. Energies. 2023; 16(7):2987. https://doi.org/10.3390/en16072987
Chicago/Turabian StyleTang, Zhen, Guoxing Mu, Jie Pan, Zhiwei Xue, Hong Yang, Mingyang Mei, Zhihao Zhang, and Peng Kou. 2023. "Dynamic Equivalent Model Considering Multiple Induction Motors for System Frequency Response" Energies 16, no. 7: 2987. https://doi.org/10.3390/en16072987