1. Introduction
The continuous utilization of fossil-fuel-based energy sources over the past few decades has not only depleted their available levels but also raised environmental concerns about, for example, global warming, air pollution, the greenhouse gas effect, etc. Owing to this, in recent years, renewable energy resources (RESs) have been promoted in place of fossil fuels for the generation of power. A micro-grid (MG) can supply power to remote areas that are difficult to feed from conventional coal-based sources due to geographical conditions. An MG mainly comprises RESs, resulting in cleaner power production and a reduction in power losses. Despite the cleaner energy production using RESs, their intermittent nature and associated uncertainties make the operation of a micro-grid difficult, particularly due to the oscillations in frequency and power that require proper regulation [
1]. Storage devices act as the supplement solution for the frequency regulation issue (FRI) in the event of a mismatch between the load demand and generation, including the intermittent nature of RESs [
2,
3]. A micro-grid comprises various distributed energy resources (DERs) that include RESs such as solar photovoltaic systems and wind turbines, storage devices, and connected loads.
Electric vehicles (EVs) play an important role in the future automotive industry as they facilitate environmentally friendly technology with significant reductions in hazardous greenhouse gas emissions and energy-saving features. Furthermore, EVs can be used for energy storage (ES) in power grids that can exchange power with the grid bi-directionally, i.e., during charging, an EV functions as a consumer in the grid, while during discharging, as a power producer. Hence, EVs play an important role in enhancing the operation of micro-grids. The main challenge in a micro-grid is that it accumulates intermittent RESs whose behavior is unpredictable and creates continuous frequency fluctuations, which needs to be addressed.
A critical literature survey reveals that a considerable amount of research work on addressing micro-grid frequency regulation has been reported [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24]. Frequency stabilization in isolated micro-grids is addressed in [
2,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
24], and that in interconnected environments is explored in [
3,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23]. The investigation in [
4] took wind turbines (WTs), bio-diesel (BD), solar-thermal (ST) plants, fuel cells (FCs), and water heaters (WHs) into consideration. In [
5,
6,
7,
8,
9], the studies considered photovoltaics (PV), diesel generators (DGs), WTs, FCs, and/or AEs, along with battery and flywheel storage. The investigation in [
10] explored the micro-grid stability issue with an ST plant, WTs, DG, an AE, an FC, and battery storage. With electric vehicles (EVs), DG, and WTs, the micro-grid frequency problem is addressed in [
11,
12]. WTs, DG, and battery storage were studied in [
13]. A two-zone MG system interconnected with DG, WTs, an FC, PV, and EVs was studied in [
3]. A two-area-based WT, PV, DG, and battery storage MG system was investigated by Lal et al. [
14]. Bio-diesel, micro-hydro turbines, and ST plants in an interconnected environment were considered by the authors of [
15]. WTs, PV, and DG with a storage system interconnected micro-grid is considered in [
16]. Ranjan et al. [
17] studied a three-zone interconnected micro-grid with WT, ST, bio-gas, and PV units. Latif et al. [
18] applied a strategy to stabilize the dynamics in a two-zone micro-grid with a WT, DG, a heat pump, and a freezer. A two-zone micro-grid with ST, WP, AE, FC, and battery storage units was studied in [
19]. A multi-micro-grid with WP, PV, and DG plants is considered in [
20]. In [
21] and [
22], a two-zone micro-grid with DG, WP, and PV plants and a storage system was studied. Bhuyan et al. [
23] investigated a two-zone micro-grid system with ST, BD, battery, and super-conducting magnetic storage units.
Energy storage devices play an important role in frequency stabilization in micro-grids. They store the excess power generated in off-peak hours while releasing energy during peak demand hours. Owing to these advantages, the studies in [
5,
6,
7,
8,
9] utilized both flywheel and battery storage, whereas the authors of [
10,
13] considered a battery storage system alone.
To stabilize fluctuations due to the randomized behavior of RESs and loads, a suitable controller is necessary for a micro-grid system. Owing to this, in the literature, different controllers have been applied to the FRI pertaining to MGs [
2,
4,
5,
6,
8,
10,
12,
13,
14,
15,
16,
17,
18,
19,
21,
22,
23]. The studies in [
5,
8,
13,
16,
17,
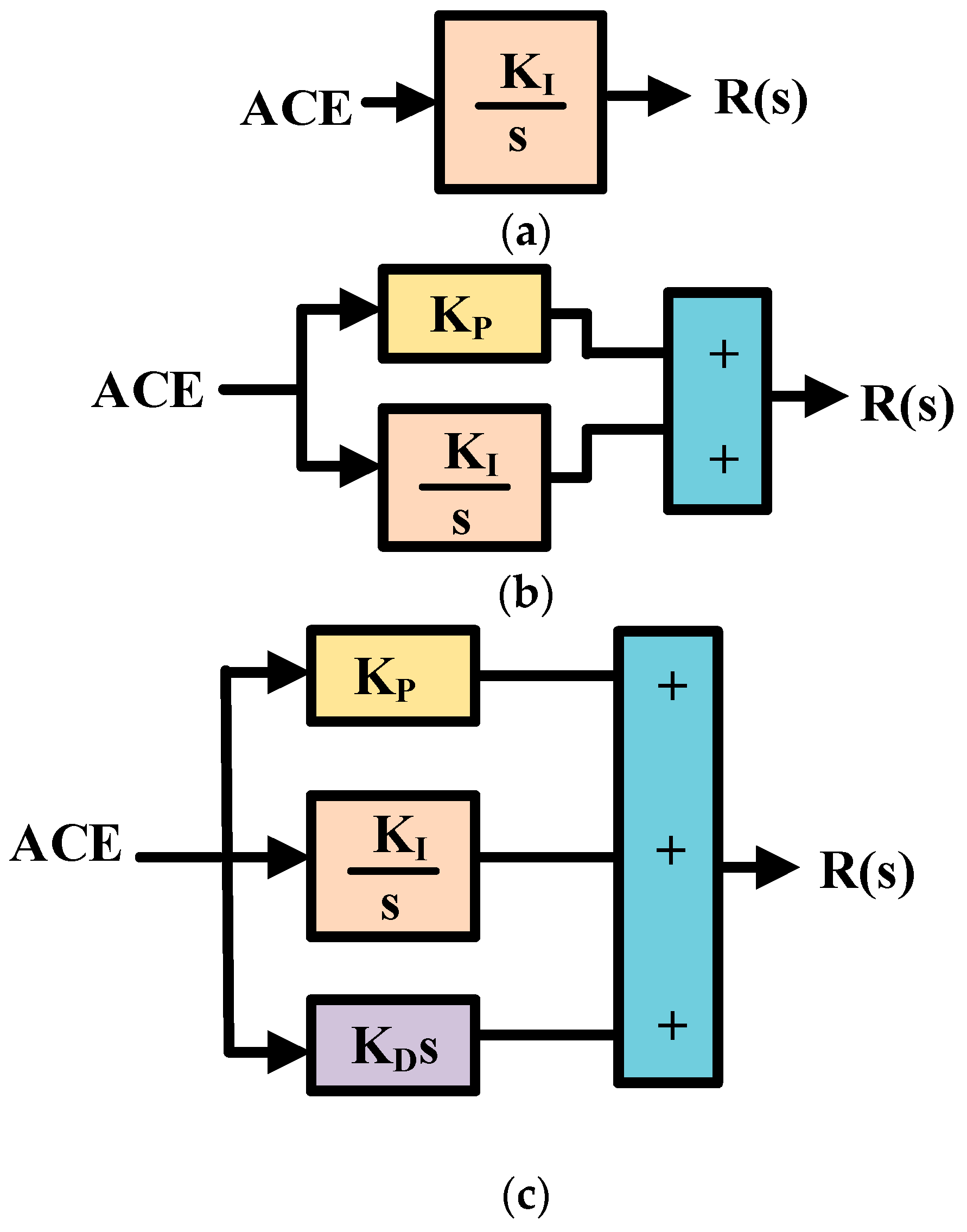
19,
21] addressed the FRI using a proportional–integral–derivative (PID) controller. A dual-degree PID (DD-PID or 2DOF-PID) controller was implemented in [
10]. The utilization of non-integer controllers, i.e., fractional-order controllers, is observed in [
18,
22]. A cascade control mechanism with master and slave controllers was applied to solve the FRI in micro-grids by the researchers in [
6,
15,
23]. PI controllers have been applied in investigations [
13,
24]. Intelligent-based fuzzy logic controllers were used in [
12,
14,
15]. A two-stage controller was also implemented in the investigations carried out in [
4]. The PID controller is versatile and popularly used owing to its superior dynamic and robust performance [
8]. It is simple in structure, easy in tuning, reliable, requires minimal expertise, and offers a balance between performance and cost [
1].
Once the controller is selected, it is expected that the controller adapts itself to varied system conditions, particularly in a micro-grid with intermittent RESs. To achieve the robust and adaptive nature of the controller, its knobs (gains or parameters) should be gained through a global optimization algorithm. In literature, the techniques such as genetic algorithm (GA) [
25], particle swarm optimization (PSO)-based robust optimization [
26], the firefly algorithm (FA) [
8], cuckoo search (CS) methods [
13], social spider optimization (SSA) [
16], mine blast algorithm (MBA) [
17], teaching–learning-based optimization (TLBO) [
21], hybrid PSO–gravitational search algorithm [
5], etc., have been applied to obtain the optimal knobs of the controller.
By critically analyzing the literature survey, the following research gaps have been identified:
- i.
Frequency stabilization for a micro-grid system comprising bio-gas [
17] and a ship diesel generator (SDG) [
27] is in infancy and needs further investigations.
- ii.
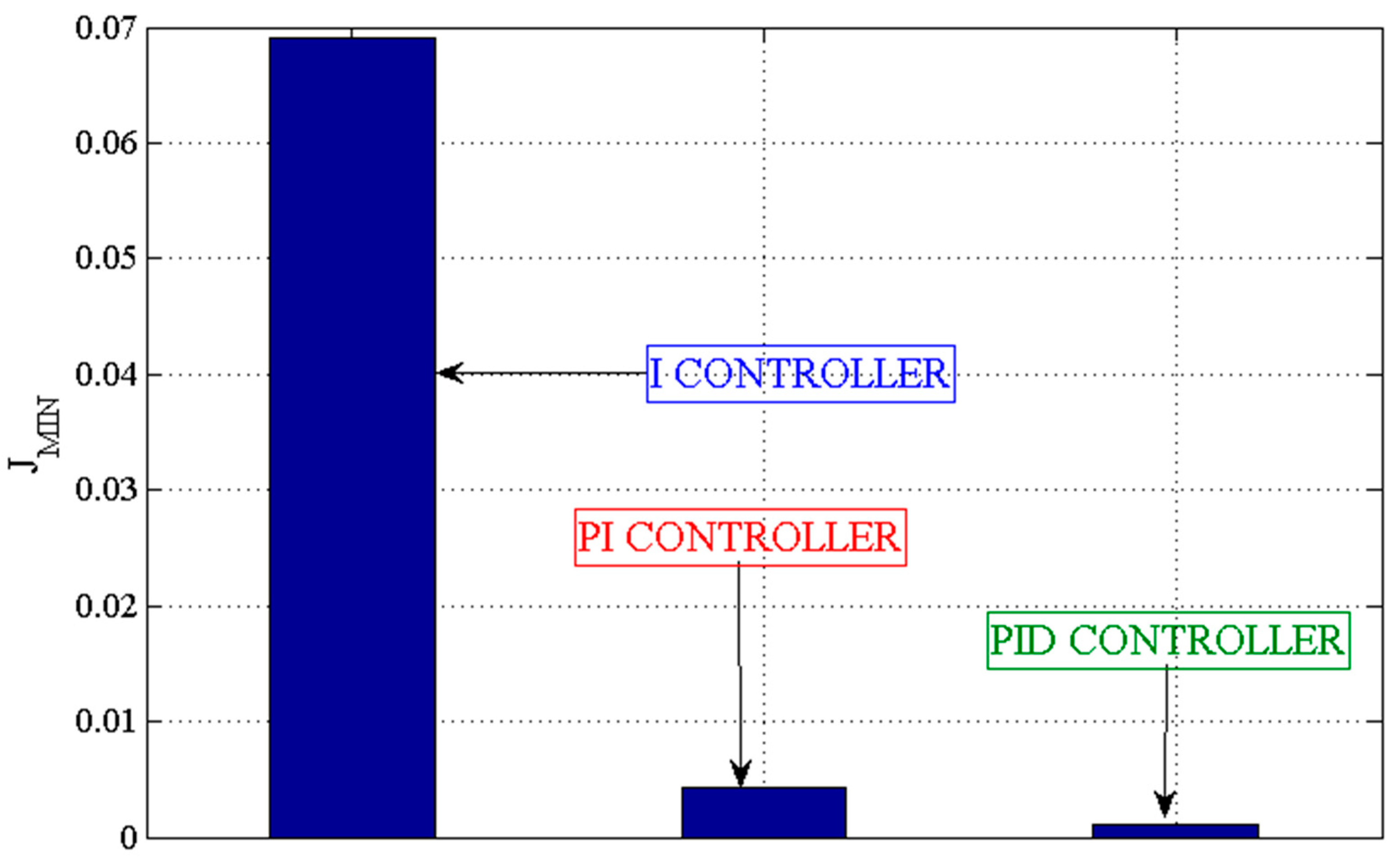
The comparative analysis of classical controllers, namely, the integral (I), proportional plus I (PI), and PI plus derivative (PID) controllers, has not been performed for a micro-grid system with BD, a SDG, WTs, an AE, an FC, DG, EVs, and storage (BES and FES).
- iii.
The recently proposed smell agent optimization (SAO) algorithm offers advantages in finding the global optimum for 76% of benchmark functions and the cost-effective design of a hybrid renewable energy system [
28]. The SAO algorithm has not been applied for tuning different controller knobs, which guarantees better micro-grid performance.
- iv.
The effectiveness of the SAO algorithm has not been tested against particle swarm optimization (PSO) and firefly algorithm (FA) for the stabilization of micro-grid oscillations.
Based on the findings of the research gaps and literature survey, the major contributions of this manuscript are as follows:
- i.
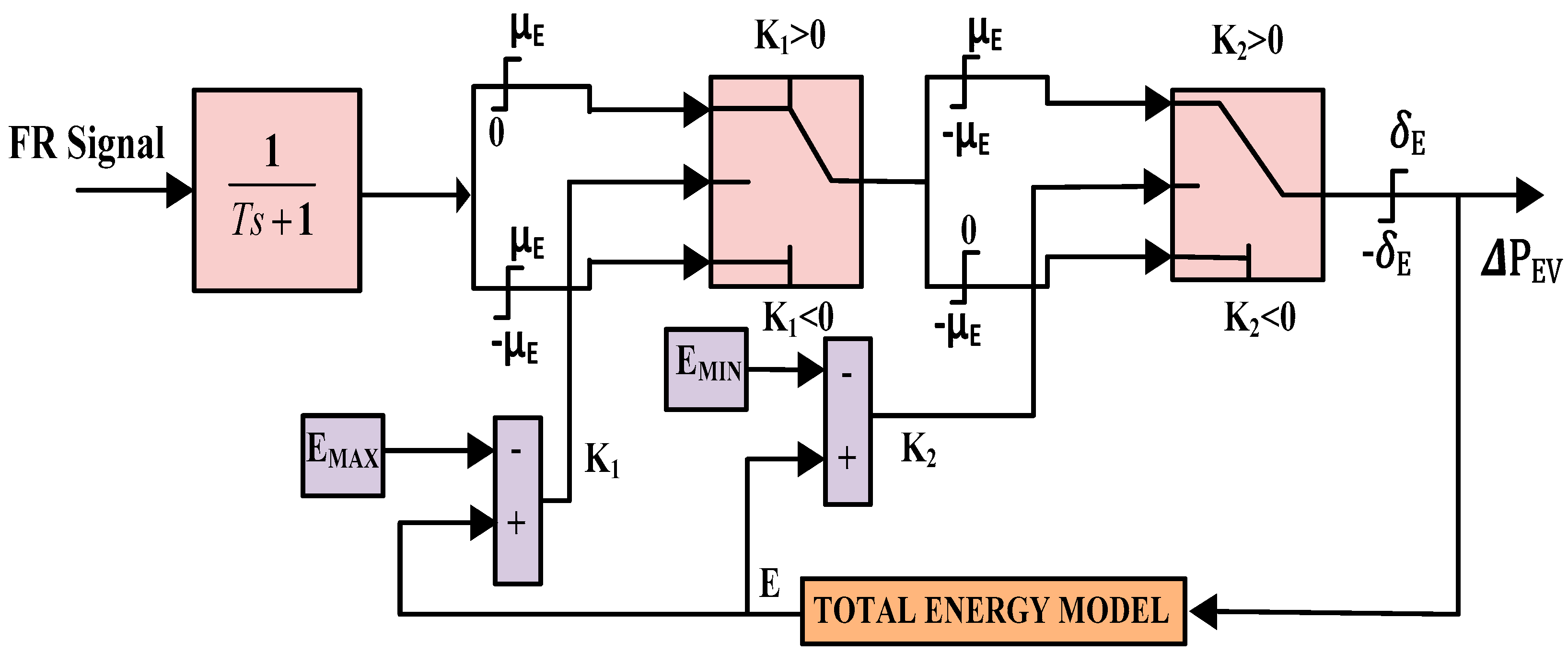
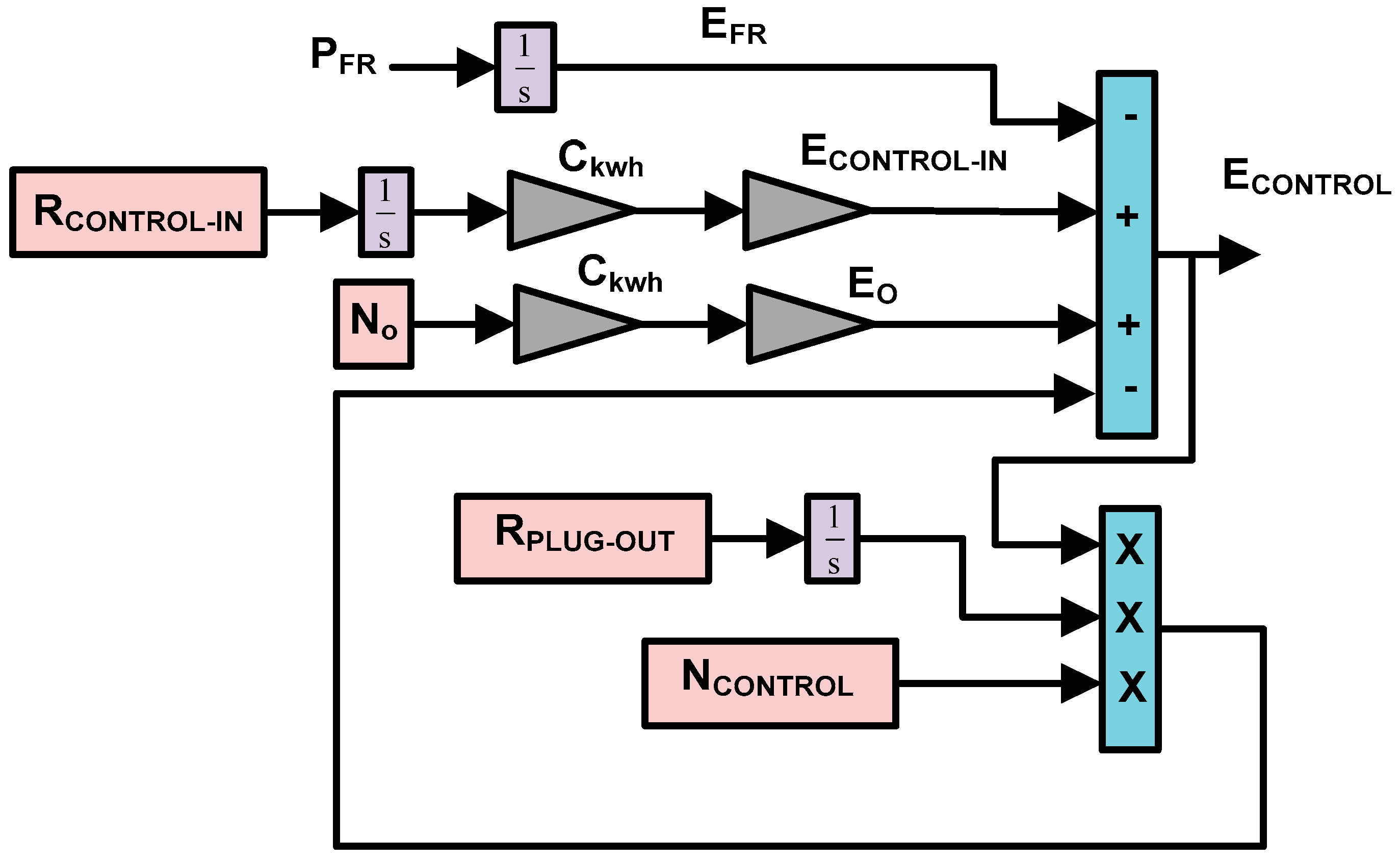
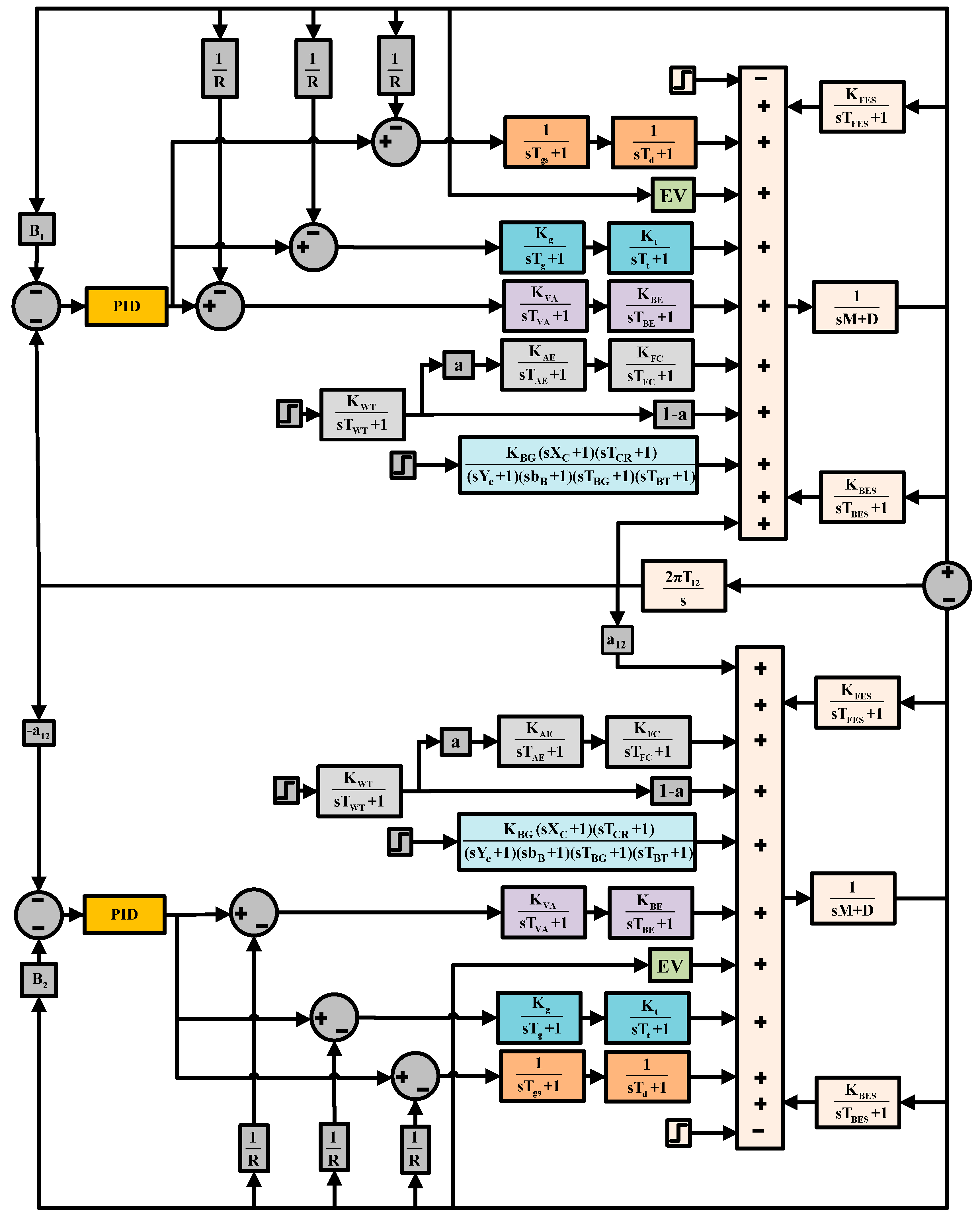
We model the dual-area interconnected small-signal analysis model of a micro-grid system comprising wind turbines (WTs), an aqua-electrolyzer (AE), fuel cell (FC), bio-gas (BG) plant, bio-diesel (BD) plant, diesel generation (DG), ship DG, electric vehicles (EVs) and their energy storage devices, flywheels, and batteries in each control area.
- ii.
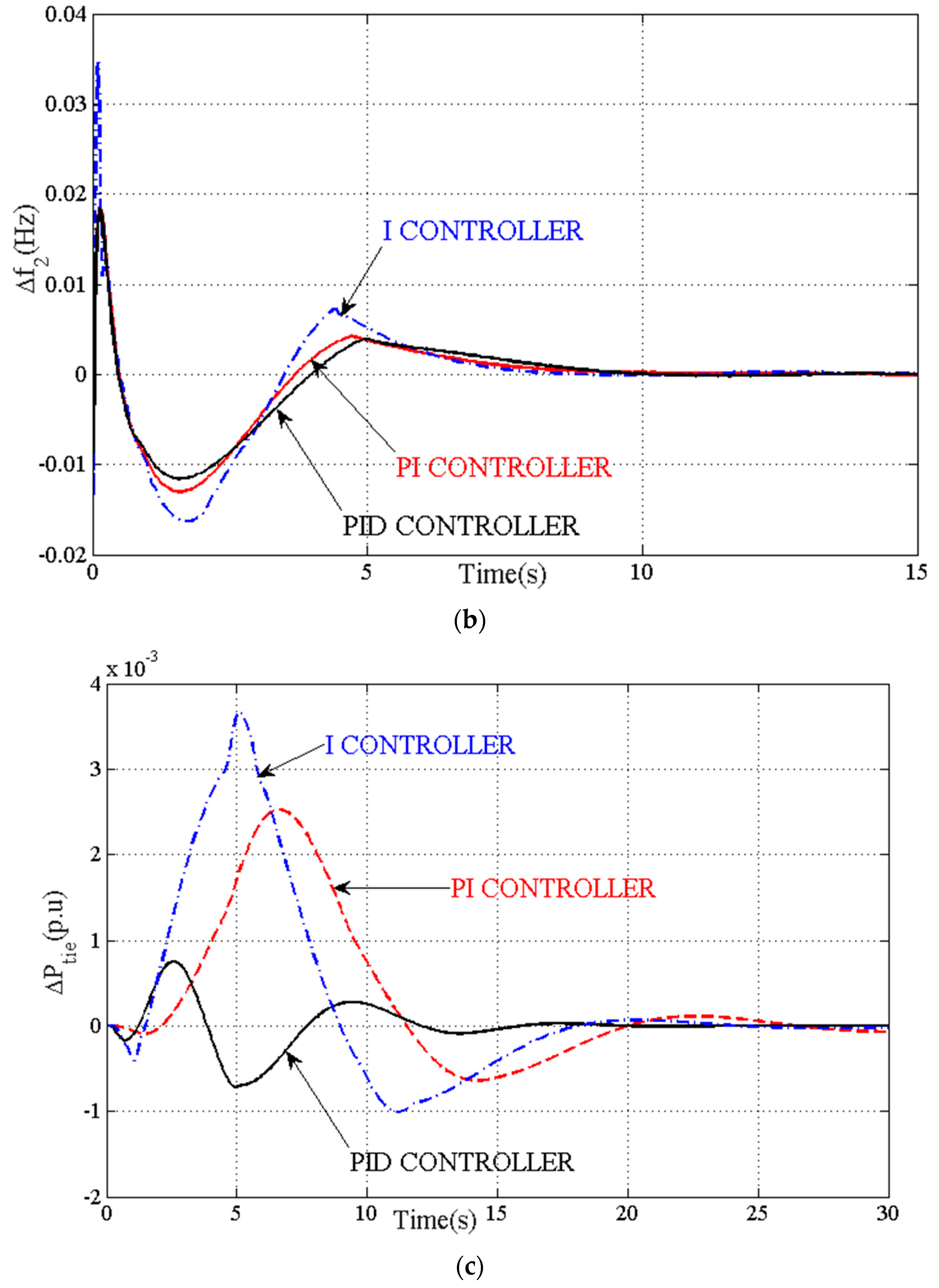
We apply various classical controllers, namely, the integral (I), proportional plus I (PI), and PI plus derivative (PID) controllers, to regulate the frequency of the micro-grid system.
- iii.
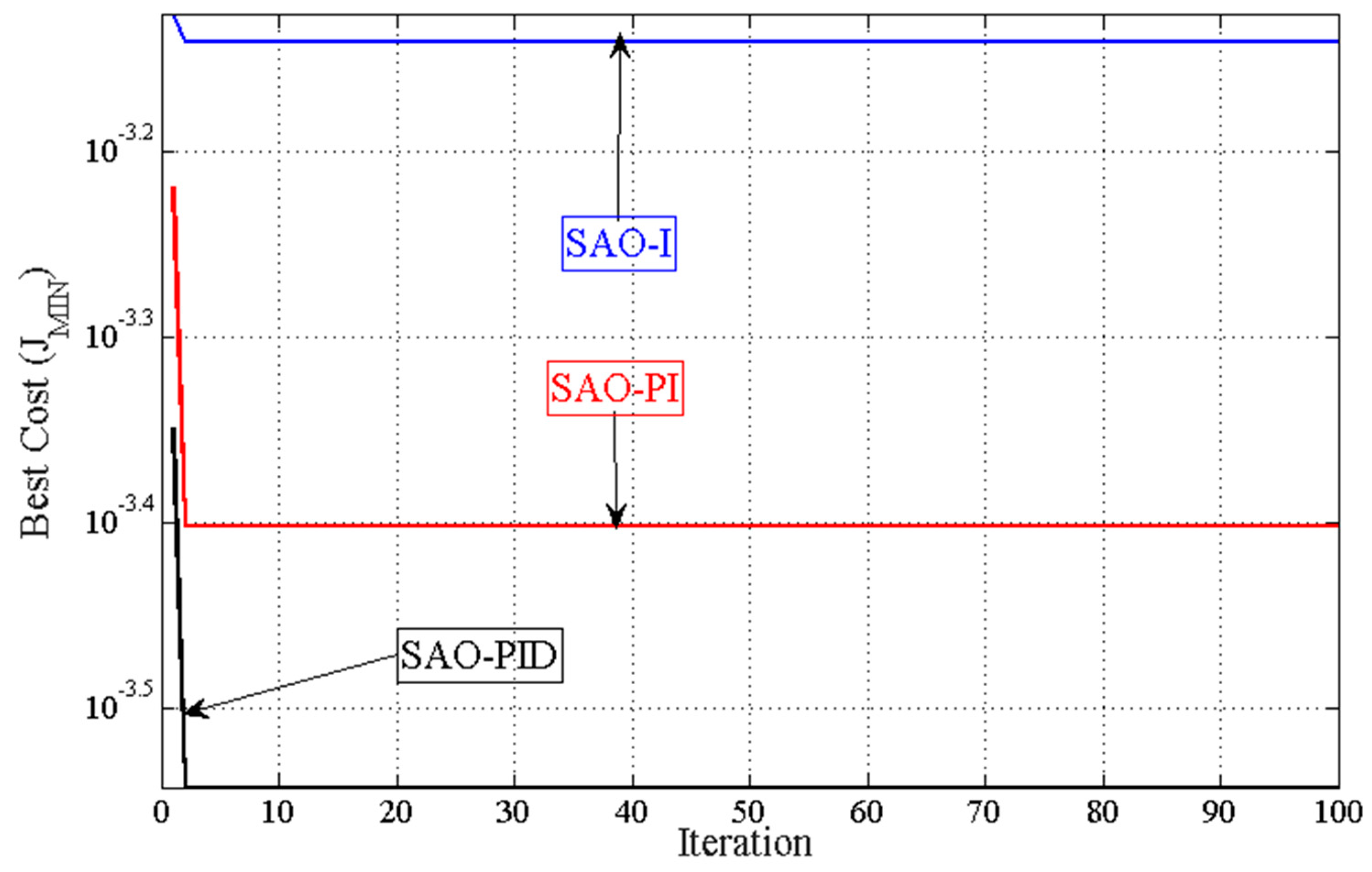
We apply the smell agent optimization (SAO) algorithm for the first time to optimize the above controller parameters to regulate oscillations in the MG system considered in i.
- iv.
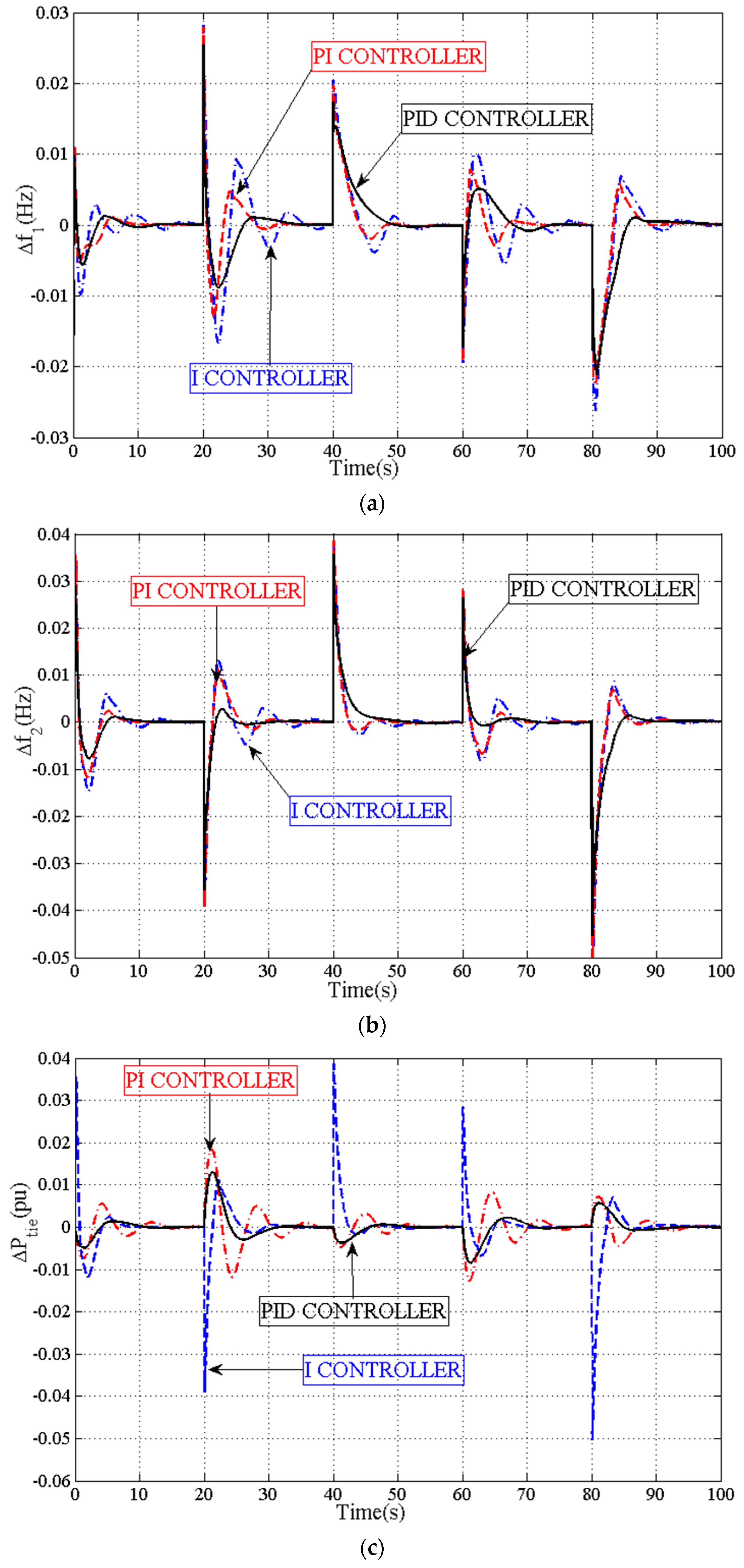
We study the comparative behavior of these classical controllers to decide the best among them.
- v.
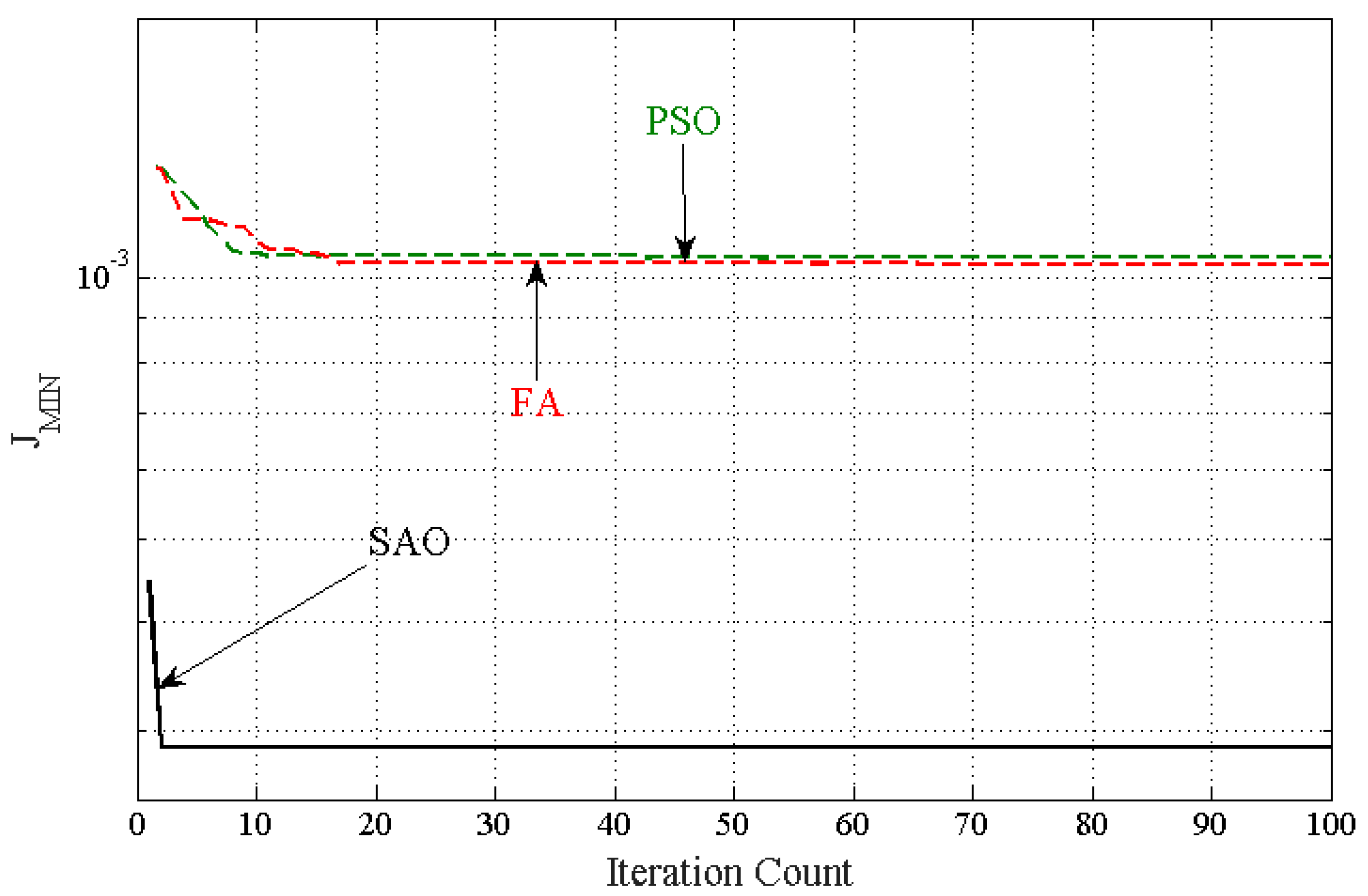
We show the effectiveness of the SAO algorithm compared with the commonly employed particle swarm optimization (PSO) and firefly algorithm (FA).
- vi.
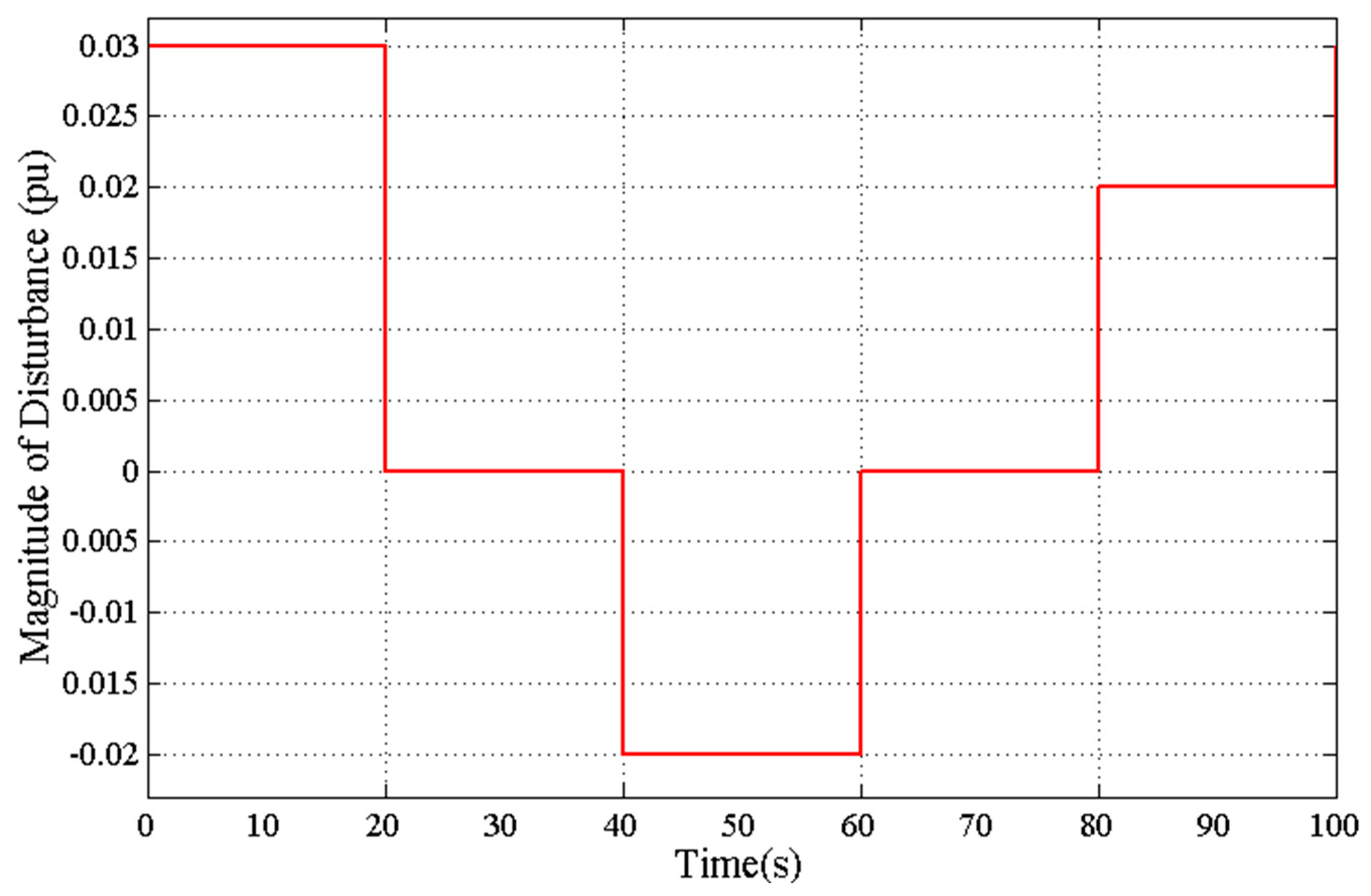
We observe the SAO-tuned PID controller performance compared with the I and PI controllers for randomized load demand patterns.
- vii.
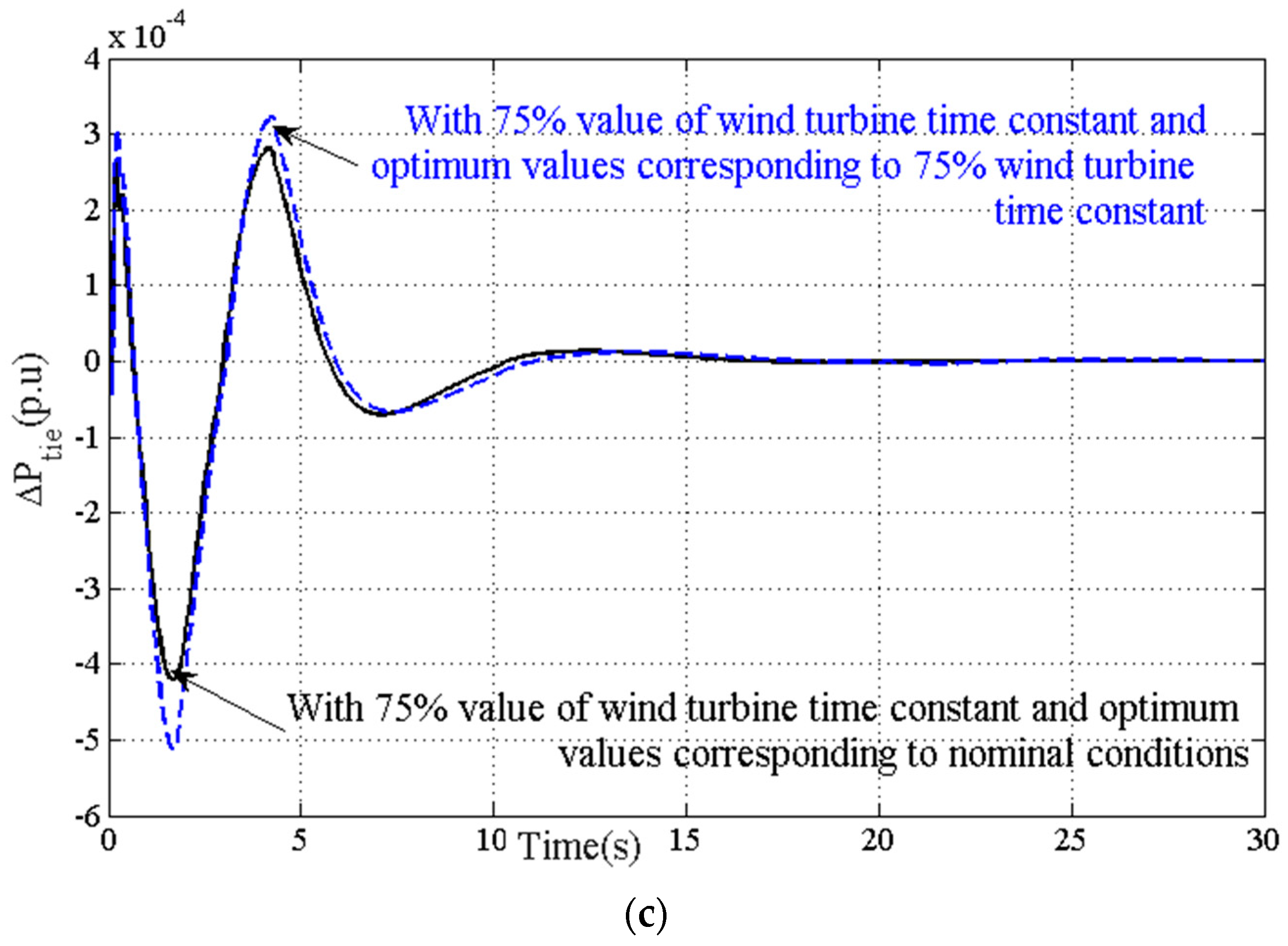
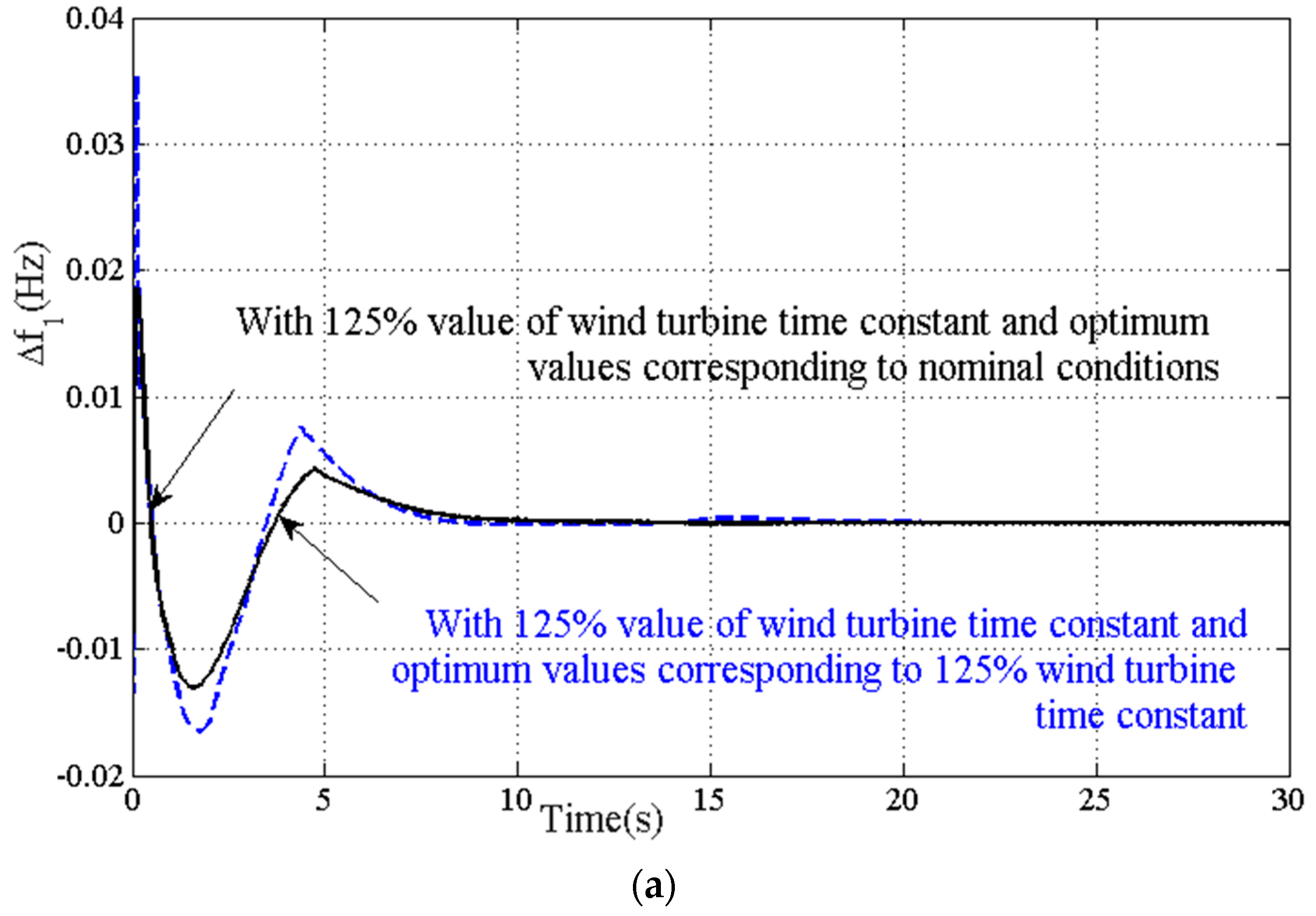
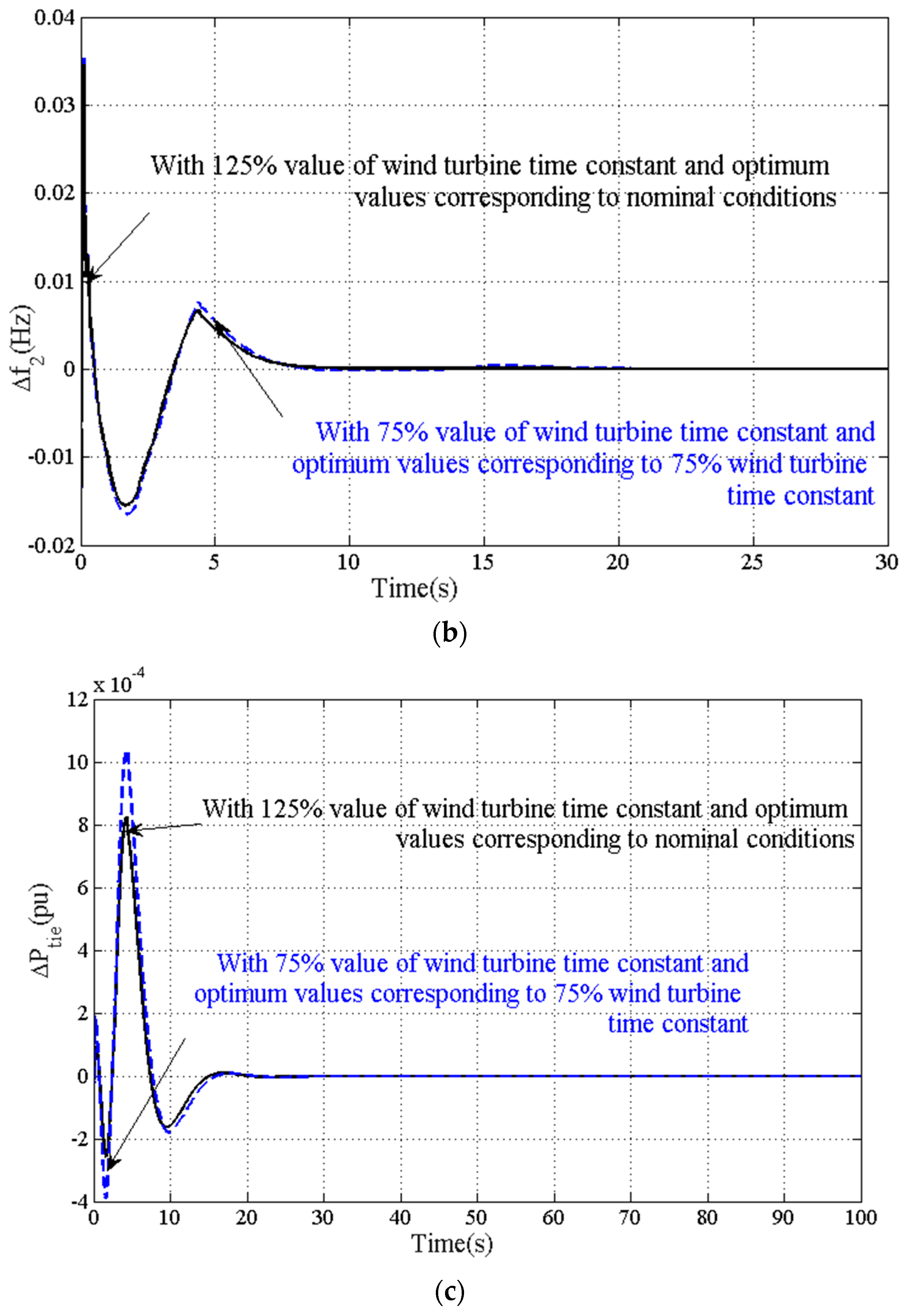
We observe the toughness of the SAO-tuned PID controller parameters with a larger load demand and deviations in the time constant values of WTs.
The rest of the manuscript is described as follows. In
Section 2, the system considered for evaluation is described. The various controllers are explained in
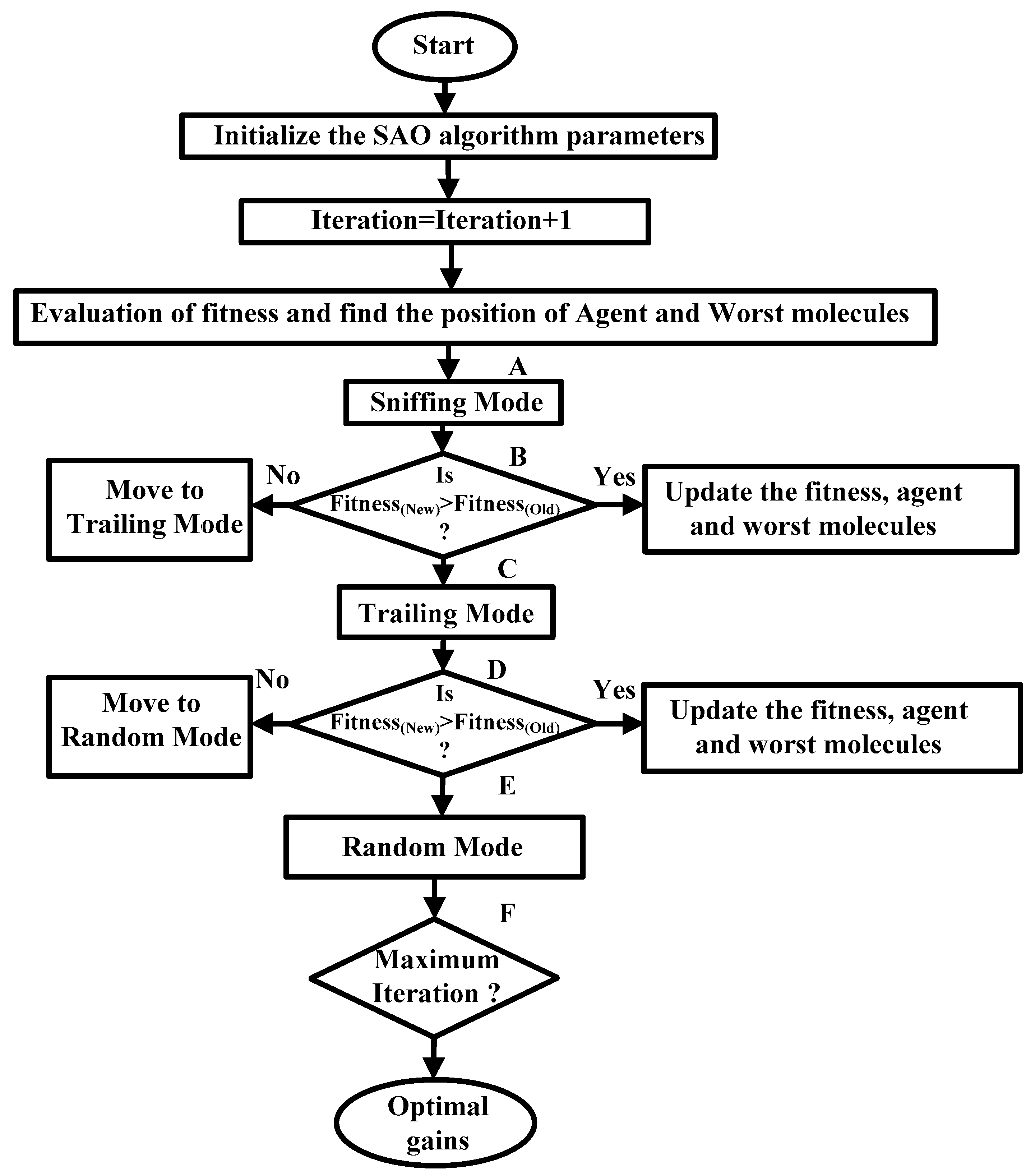
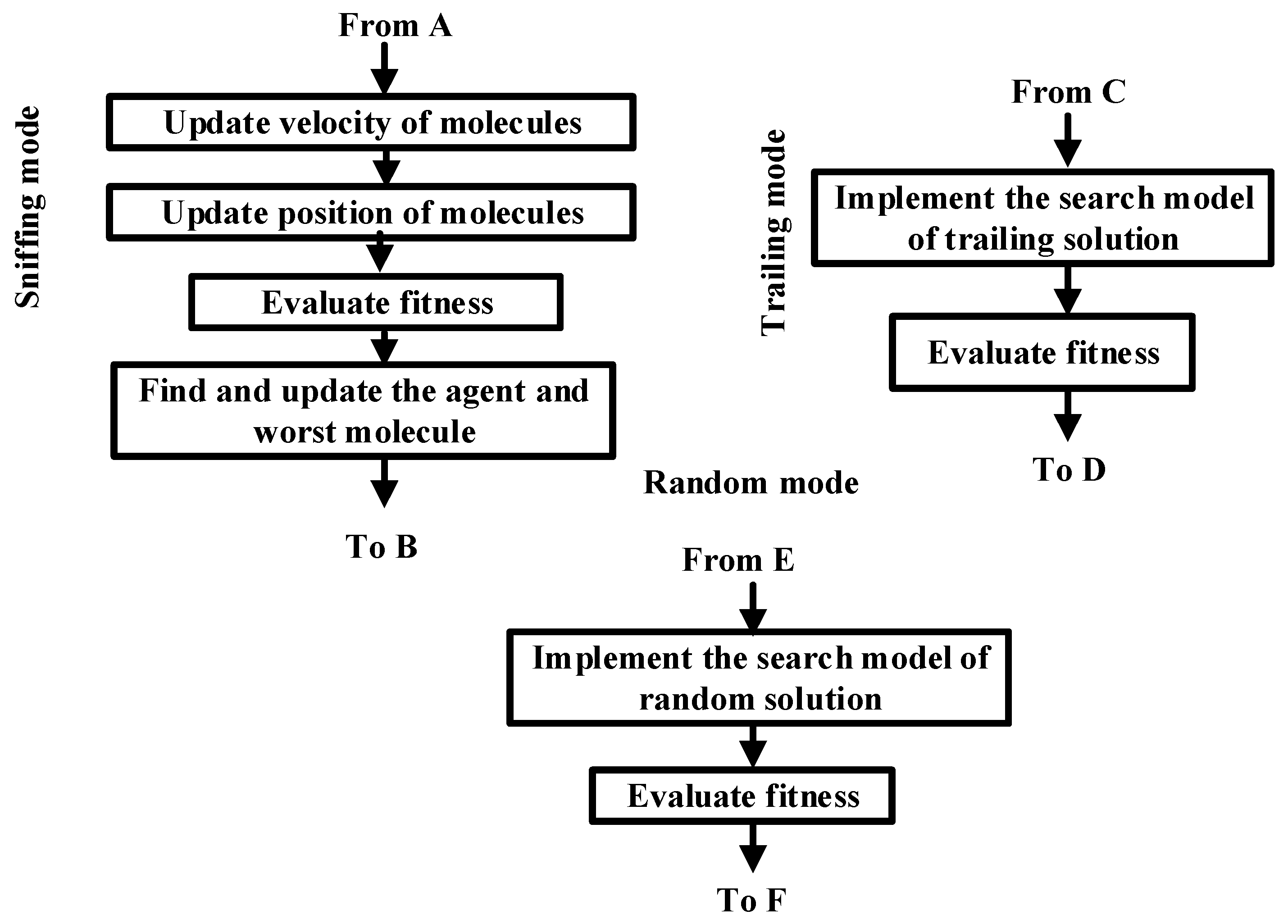
Section 3. The detailed SAO algorithm is discussed in
Section 4. In
Section 5, the analysis of the obtained results is discussed. Finally, the conclusions are described in
Section 6.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





















