1. Introduction
Currently, energy production is based on the consumption of fossil resources, which is an expensive process that leads to the depletion of available non-renewable resources. Therefore, the importance of the use of natural resources (renewable resources) arises at the time of introducing other forms of sustainable electricity production, supporting the environment, because this resource does not generate pollution [
1,
2].
The energy needs facing the world and the increase in energy consumption in the coming years make it necessary to increase the generation of electric power, which is restricted by the reduction of fossil fuel reserves and the harmful impact it has on the environment [
3]. Therefore, it is important to understand the term microgrids, which are composed of energy generation sources such as solar, wind, biomass, geothermal, hydroelectric, and fossil, among others, in addition to integrating storage systems to supply local loads [
4].
The classification of microgrids is very broad because they can operate in AC current, DC current, or both. Microgrids can operate in isolated mode and grid-connected mode, allowing disconnection and connection to the conventional distribution network. Isolated microgrids arise from the need to supply energy to sectors of difficult access, whether isolated or rural areas, which for the most part do not have access to electric power service [
3,
5,
6].
Traditionally, microgrids have a three-tier hierarchical control architecture. The primary control includes the local controllers to regulate frequency and voltage and the droop control for power sharing in the dispatchable generation units. The secondary control is in charge of restoring frequency and voltage [
7]. Finally, the tertiary control is in charge of the optimal management of the microgrid [
8,
9,
10].
Therefore, microgrids have gained attention as a new alternative to face the energy transition and the challenges of energy supply, due to their versatility to operate in isolated or grid-connected mode [
8]. Among the main contributions of microgrids in the energy market, it stands out that they are more efficient, reduce CO
2 emissions, encourage the use of renewable energies, and reduce energy costs. In addition to the above, microgrids are not centrally planned or managed [
4,
5].
In the specialized technical literature, there are works such as [
11], where they propose an optimal power flow approach, using iterative linear programming, in which the power flow equations are iteratively linearized around new operating points within an appropriate stability margin. When a disturbance occurs, the operating point is shifted towards the stability limit, where each iteration requires solving the nonlinear optimization problem to improve the static voltage stability; however, this work is focused on AC microgrid applications.
Currently, the distribution of DC energy through microgrids is a topic of research interest for residential applications, due to the increase in DC loads, the implementation of energy sources based on renewable resources, and the development of power electronics and storage systems [
12,
13].
The advantages of DC microgrids are reduction of power losses, increases system efficiency, integration of distributed generation technologies through control and monitoring, and cost reduction. They can also supply energy to a load independently when voltage fluctuations occur, ensuring an efficient, reliable, and safe system [
12,
14,
15].
It is important to note that failure to properly manage a microgrid leads to a waste of energy resources, making it an inefficient operation. Therefore, an adequate management system is necessary to manage the energy flow of the generation units; this can be achieved with intelligent and optimal control strategies, which is how the term energy management system (EMS) appears.
EMS is important in controlling the generation and distribution of power flow in microgrids and, therefore, minimizing operating costs [
15,
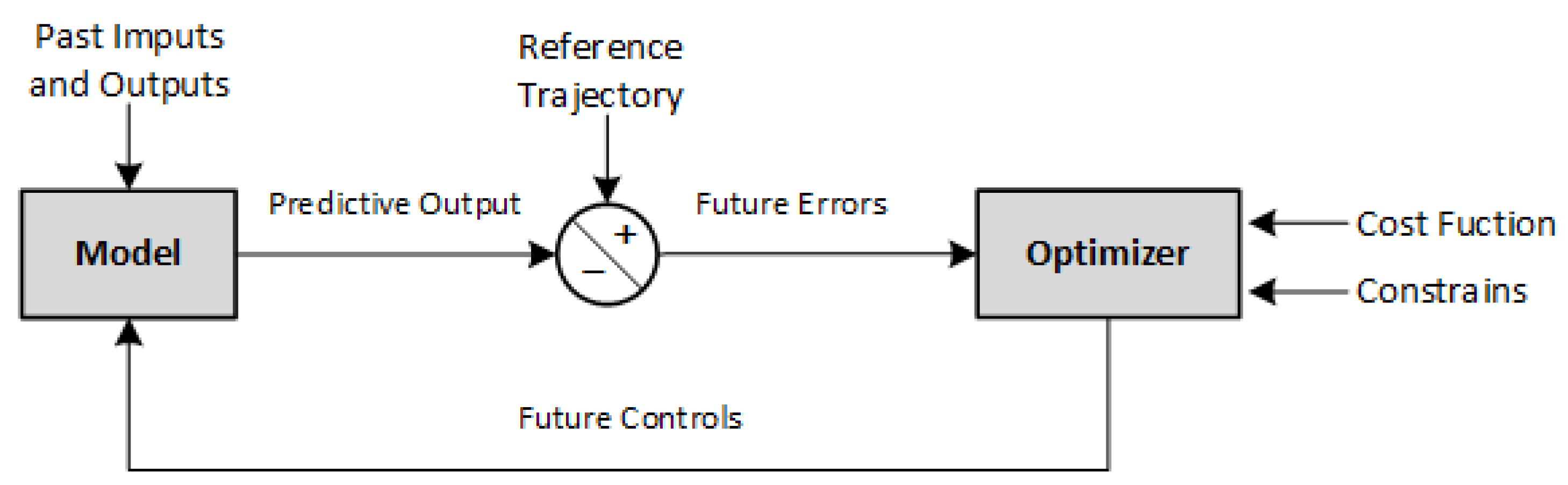
16]. Therefore, a control system based on MPC (Model Predictive Control) optimization is proposed, which makes explicit use of the mathematical model of the process, in addition to considering the objective function that seeks to minimize the operating cost of the system [
17,
18,
19].
There are some EMS proposals for DC microgrids that apply various control methods. In [
20], an isolated microgrid consisting of two renewable sources, a diesel generator, and a storage system is developed. The objective is to maximize the useful life of the batteries and minimize the cost of energy generation, using the multi-objective genetic algorithm NSGA-II. As a result of the optimization algorithm, several solutions are obtained that meet the cost-minimization requirements. Therefore, it is up to the researchers to select the solution that fits the physical conditions of the microgrid.
In the same context of EMS applied to DC microgrids, Ref. [
21] presents a predictive control of a microgrid that can operate in island mode or grid-connected mode, using a distributed control architecture, i.e., integrating an MPC for each generation unit (wind generator and photovoltaic generator) and another MPC for the energy storage unit; therefore, this type of control makes decisions individually. In addition, management based on heuristic methods is evidenced, ensuring that the management system determines the operation mode of the microgrid based on the generated power, demand, solar irradiance, wind speed, the nominal power of the units, and the SOC of the BESS.
Meanwhile, in [
22,
23], the MPC control strategy is implemented to optimally manage the load sharing between generation sources, storage, and interaction with the grid if necessary. However, the management system solves the optimization problem without real-time feedback on the actual battery states.
The authors in [
24,
25] propose an energy management system (EMS) [
24] based on a MOGA algorithm (multi-objective genetic algorithm) with a 51% reduction in operational costs and a 96% reduction in the amount of pollutant gas emissions. In [
25], in addition to an EMS, they implement a demand-side management (DSM) that consists of modifying the consumption within a certain range of time, to reduce the cost and adjust the generation profiles of energy.
In [
26] they use an advanced control for the management of a DC microgrid that operates in island mode through an MPC model integrating artificial intelligence (AI), where AI replaces mathematical modeling typically used when working with complex and accurate mathematical models, demonstrating that the controller is capable of providing efficient control actions for optimal energy management and a correct energy balance for the microgrid.
Ref. [
27] analyzes the optimization of isolated AC microgrids that include several renewable sources and energy storage, focusing on several systems connected in the same microgrid. Therefore, for the interconnection of the microgrids, a distributed control based on the DMPC model is developed because it considers each unit as a subsystem and will be controlled by a local MPC, which is fundamental for understanding the information to be exchanged between each unit. In addition, for integrating electric vehicles (EV), it was necessary to develop an EMS to manage the use of vehicle batteries. Furthermore, Refs. [
27,
28] realize the integration of electric vehicles (EV), therefore the development of an EMS to manage the use of vehicle batteries is necessary.
In the previously reported works, the local controllers were not designed, nor was there online feedback on the measurements that show the current state of the batteries in the EMS system. Therefore, a control strategy is considered, with no feedback from the actual measurements, i.e., it is assumed that everything works correctly. However, disturbances at that level are not identified by the EMS.
This research paper proposes the design of a tertiary EMS control for an isolated DC microgrid, consisting of a photovoltaic system that takes full advantage of the solar resource, a diesel generator as a backup power source, a battery energy storage system, and a DC load.
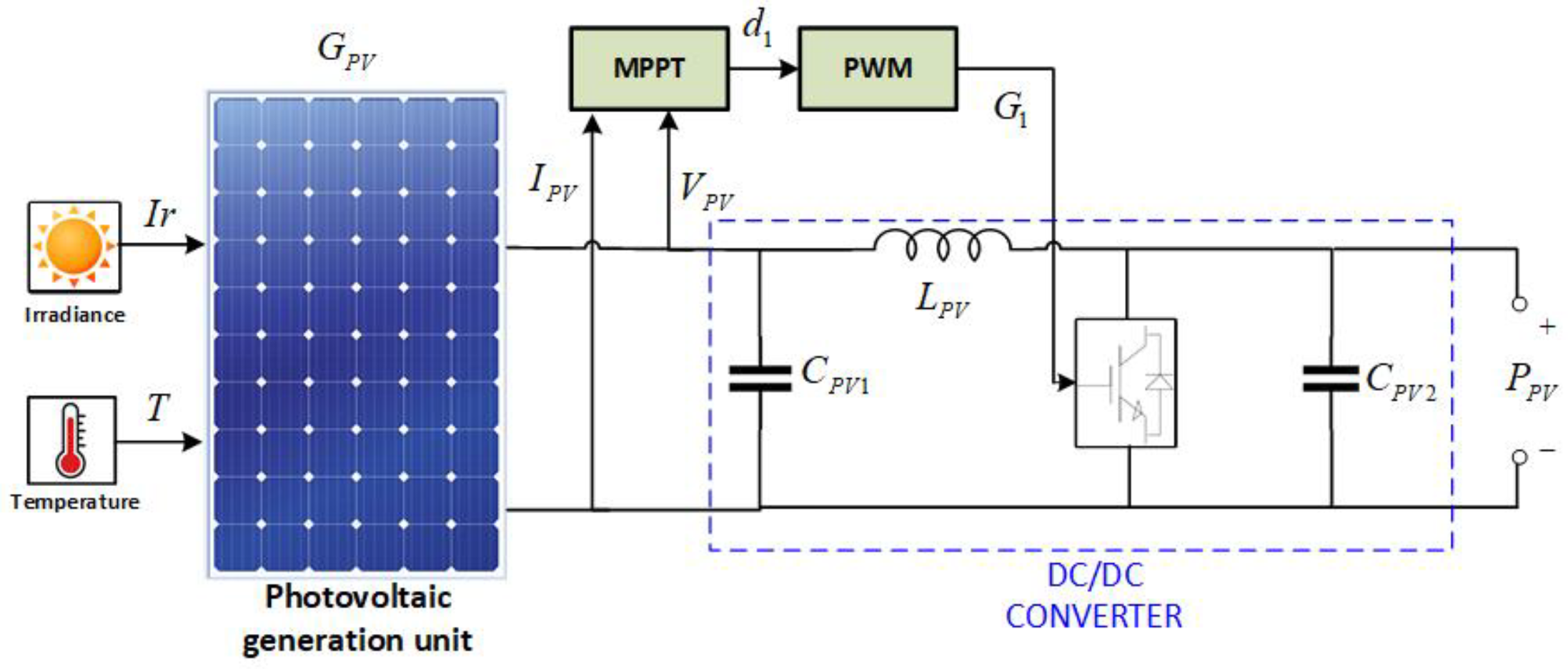
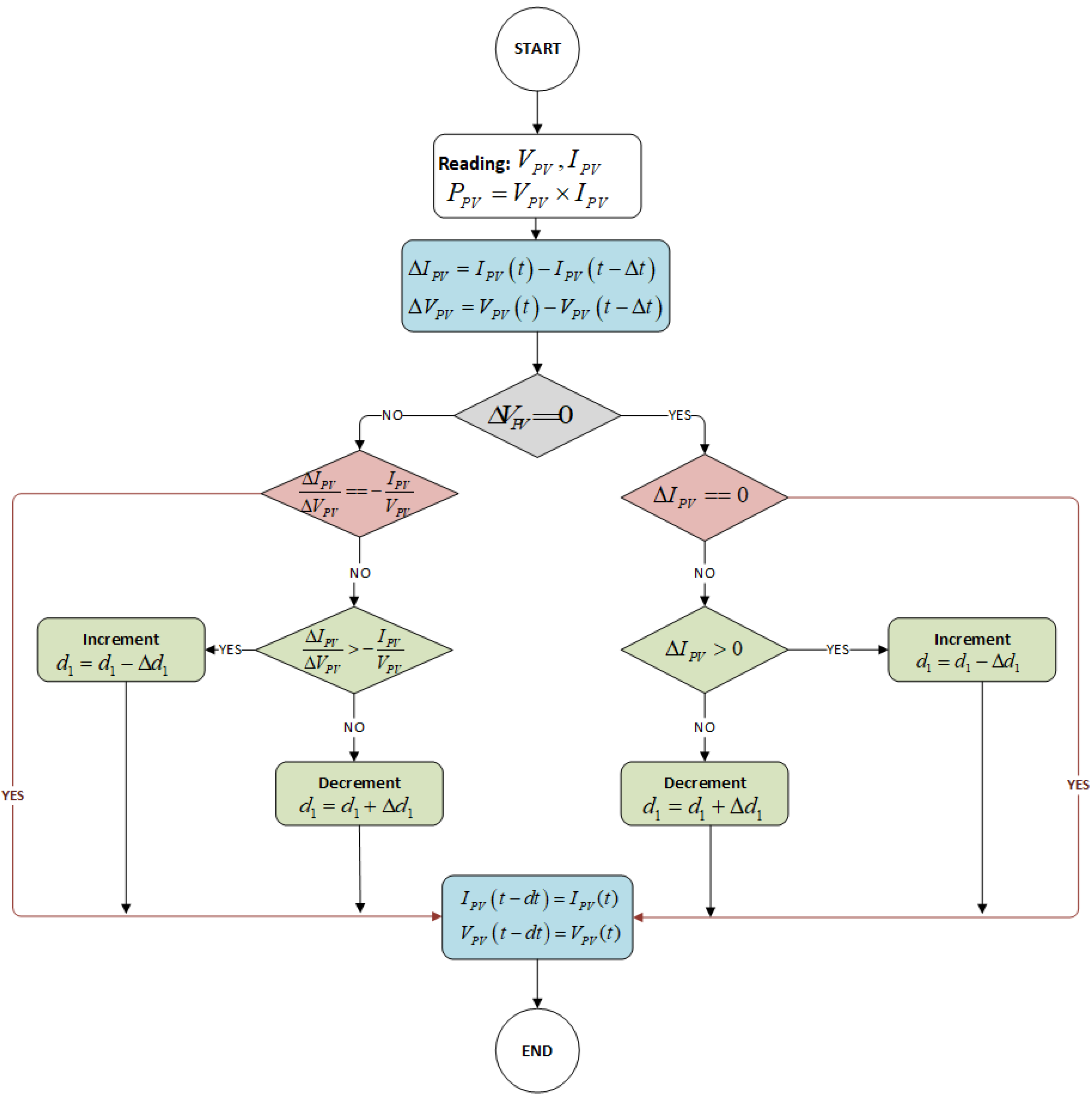
The photovoltaic system is connected to the Bus DC through a boost-type DC/DC power converter, which contains an MPPT based on the incremental conductance algorithm (INC). On the other hand, the diesel generator will operate only when necessary. The storage system, consisting of a battery bank, is connected to the Bus DC through a bidirectional buck–boost topology converter that allows operation in charge and discharge mode of the storage system.
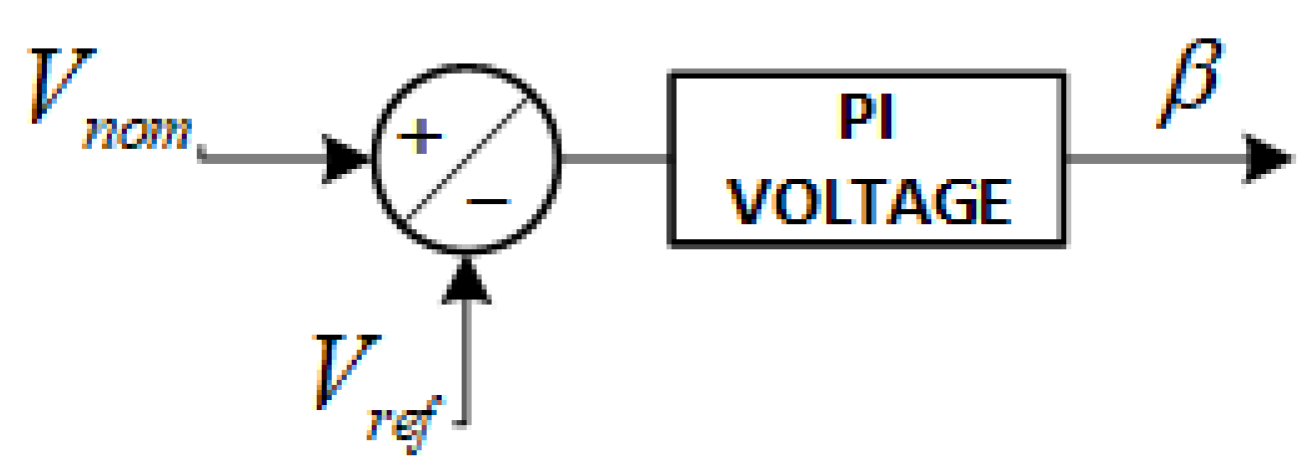
The control of the microgrid is performed by a local PI voltage and current controller, which allows maintaining a constant voltage on the Bus DC and the droop control to share the power generated by each generation unit. The optimal management is performed by an EMS, which allows optimal and efficient decision making in the management of the system, controlling several generation units including a photovoltaic system, BESS storage system, and a diesel generator, which will be able to feed a DC load.
All control levels are designed, but mainly in this work, an EMS based on MPC is proposed to maximize the consumption of energy based on renewable resources (sun) and minimizing the consumption of energy from the diesel generator and costs for the energy consumption. It also has the scope of increasing the useful life of the battery while respecting the SOC, guaranteeing optimal charging and discharging.
The main contributions of this research work are: (i) Proposing a control strategy for the optimal management of an isolated DC microgrid, maximizing the use of solar resources, extending battery life, and minimizing the operating cost of the microgrid, through the optimal distribution of power, based on linear programming guaranteeing the global optimum; (ii) Design and simulate all levels of control, integrating primary, secondary, and tertiary control, making measurements in real-time, which allows understanding the operation of the microgrid in a couple, where the tertiary control (EMS) responds to changes in the lower control levels when disturbances occur; therefore the operation of the DC microgrid is integral; (iii) The tertiary control is based on MPC operating in sliding mode; in this way the EMS designed allows reaction to rapid changes in demand and irradiation, being able to detect changes in input variables.
The rest of this document is organized as follows: The system description (
Section 2) shows each of the elements that make up the microgrid and how it will be controlled by the EMS. The design of the control and management algorithms of a DC microgrid is presented (
Section 3), where the architecture of each control level is explained in detail. The results (
Section 4) show the comparison of the operation between a microgrid with and without the proposed EMS. The conclusions (
Section 5) show a quantitative analysis of the costs generated by not having a tertiary control that adequately manages the power supplied by each generation unit, and the optimal operation of the DC microgrid with all levels of control.
2. System Description
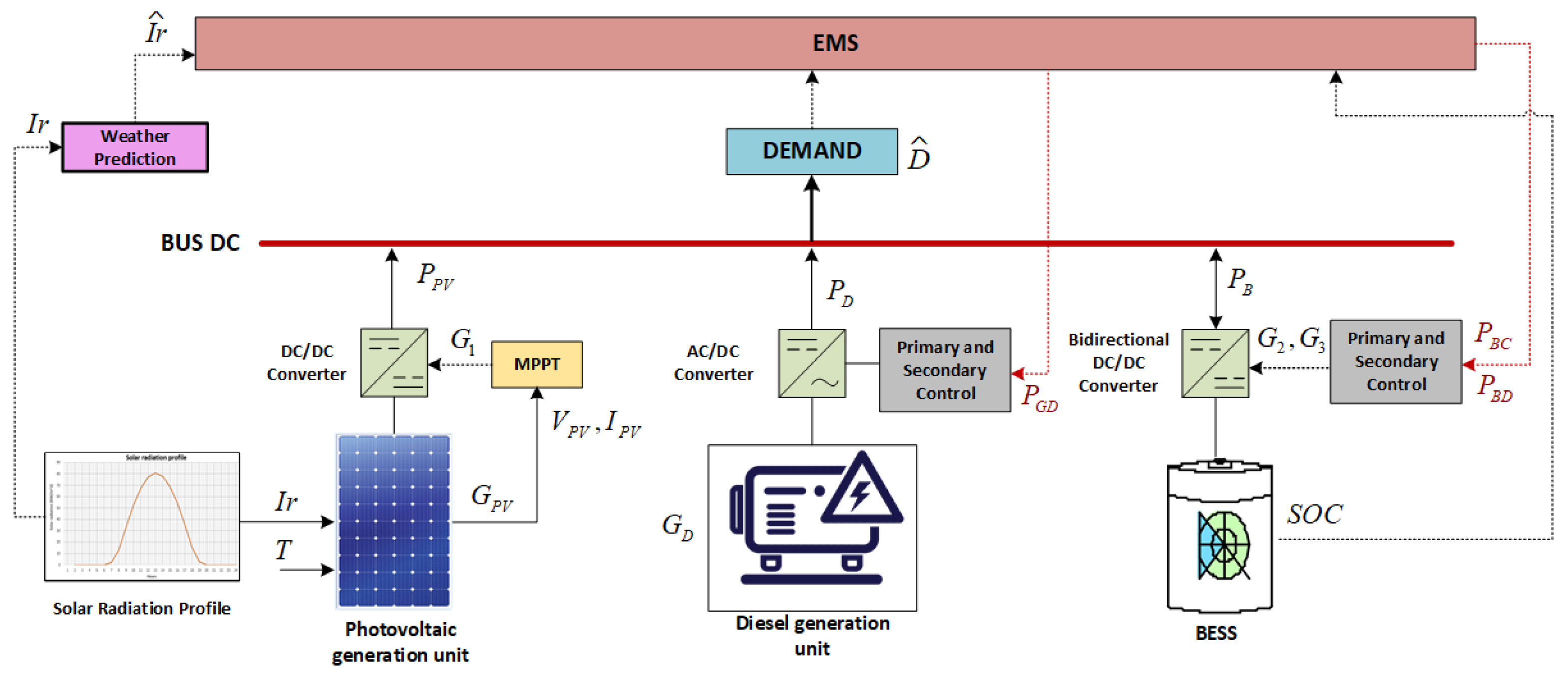
As mentioned above, this research proposes the control of an isolated DC microgrid, as shown in
Figure 1, consisting of a photovoltaic generation unit (
), a diesel generation unit (
), and a battery energy storage system (BESS), connected to a bus DC that supplies power to a DC-type load at a constant power.
The photovoltaic generation unit capture la solar irradiation (
Ir), transforming it into electricity, an energy that is injected into the Bus DC to supply demand; it is also important to note that
is an input to a prediction model, and its output (
) will be the input to the EMS optimization problem. The photovoltaic panels have a voltage response (
) and current (
) depending mainly on the solar irradiance (
) and temperature (
), which are external factors that directly affect its operation [
29]. This unit provides photovoltaic power represented by
), which is controlled by an incremental conductance MPPT that generates the
trigger to activate the IGBT of the DC/DC converter.
On the other hand, the diesel generator is in charge of transforming the fuel into electrical energy, represented as diesel power . Its main objective in microgrids is to be an auxiliary unit as a support in case the predicted electrical demand ( is not covered by other generation units. Its operation depends on the diesel generator power calculated by the EMS . This diesel generation unit, being an alternating current source, needs an AC/DC converter to be implemented in a DC microgrid, thus performing the conversion to be able to feed the direct current load.
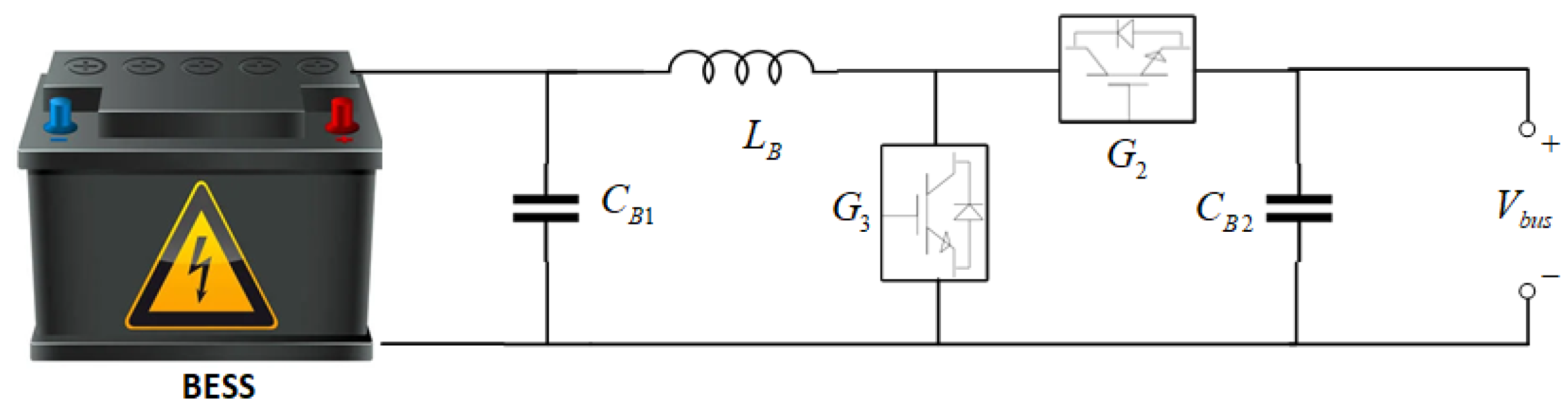
The battery energy storage system (BESS) will be able to deliver energy on demand, expressed as the battery power , which can operate in charge mode when () has a negative sign and discharge mode when it has a positive sign. However, in the process of charging and discharging the battery, overloads and deep discharges cannot be allowed indefinitely, because this seriously compromises their useful life. Therefore, the SOC (State of Charge) is important for the analysis between the amount of power that can be obtained from the battery with respect to the total power. In order to keep the batteries within the safe operating threshold, control strategies are implemented to prolong their useful life.
These modes of operation are performed by the bidirectional DC/DC converter regulated by the EMS control signal, battery discharge power calculated by the EMS (), and battery charge power calculated by the EMS , allowing it to generate the triggers in for the activation of the IGBT circuit breakers on the values of and provided by the EMS.
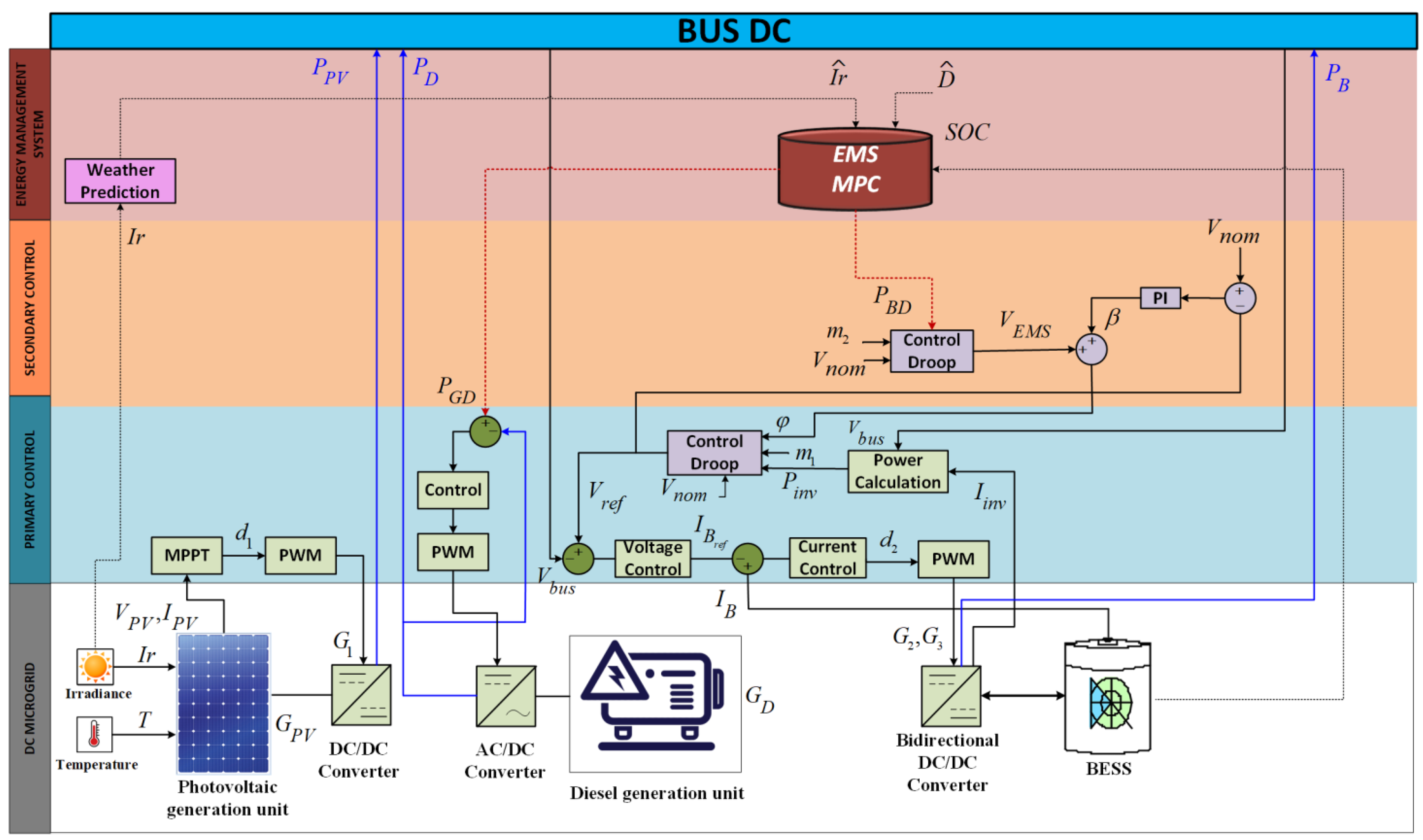
Therefore, the different levels of control are designed and analyzed; the first level corresponds to the local control that constitutes the voltage and current controllers, the droop control, the voltage regulators, and finally an EMS management system. It is important to consider that the EMS is based on an MPC controller, capable of making optimal and efficient decisions in the management of the DC microgrid, based on the real-time status of variables such as the state of the battery.
4. Result
For this research, we propose an energy management system based on an MPC control for a DC microgrid in island mode with real-time measurement feedback, for which the controls at the lower levels are implemented. The performance of the microarray without and with EMS is compared.
The microgrid consists of a photovoltaic generation unit, BESS, and a diesel generation unit connected to a Bus DC with the corresponding power electronics interfaces to supply a DC load, as shown in
Figure 1. The models of the generation units and controllers designed at the different control levels described in
Section 3 ere simulated in Matlab/Simulink R2016a software. For the design and simulation of the proposed optimization problem, the Fico Xpress Optimization software was used, linking the two softwares to emulate a real operation where the supervisory control for the microgrid management sends and receives signals from the microgrid operation. The simulation parameters used for the microgrid are described in
Table 1,
Table 2,
Table 3 and
Table 4. The photovoltaic generation unit operating parameters, BESS parameters, and diesel generator unit parameters are shown in
Table 1,
Table 2 and
Table 3, respectively, while the converter and load parameters are shown in
Table 4.
Evaluation of DC Microgrid Operation
This section validates the performance of the DC microgrid. The following scenarios are analyzed and compared: (i) without considering the optimal management of the EMS, only with the primary controls; (ii) considering the optimal management of the proposed EMS, which includes real-time feedback of the measured variables, and the EMS is operating in sliding mode, i.e., it takes samples every 5 s and recalculates the optimal solutions for the control of the microgrid. The microgrid is subject to disturbances from changes in radiation and changes in demand. The microgrid’s performance is analyzed in terms of technical, economic, and optimal battery management.
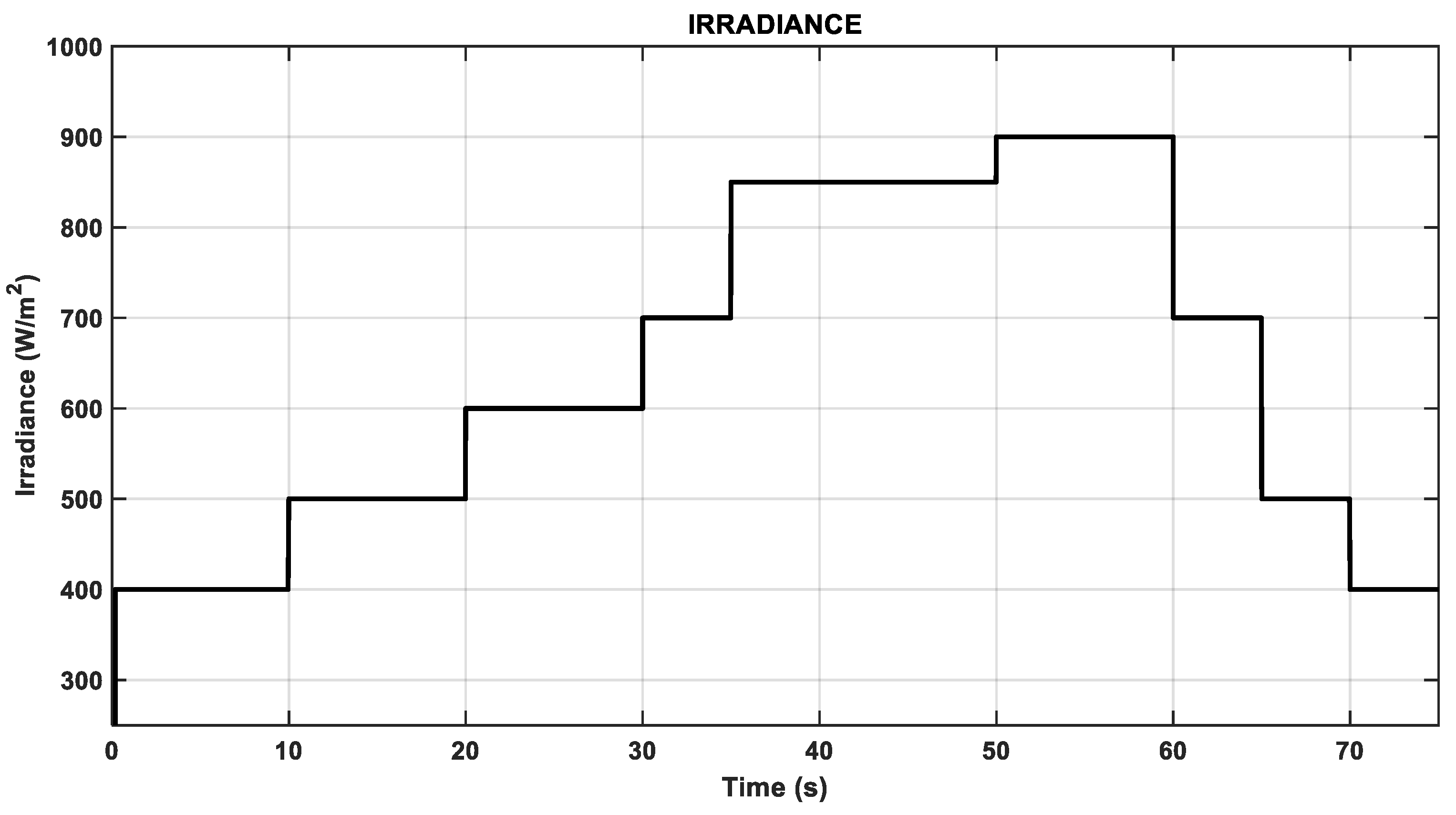
The results obtained by applying the radiation profile (
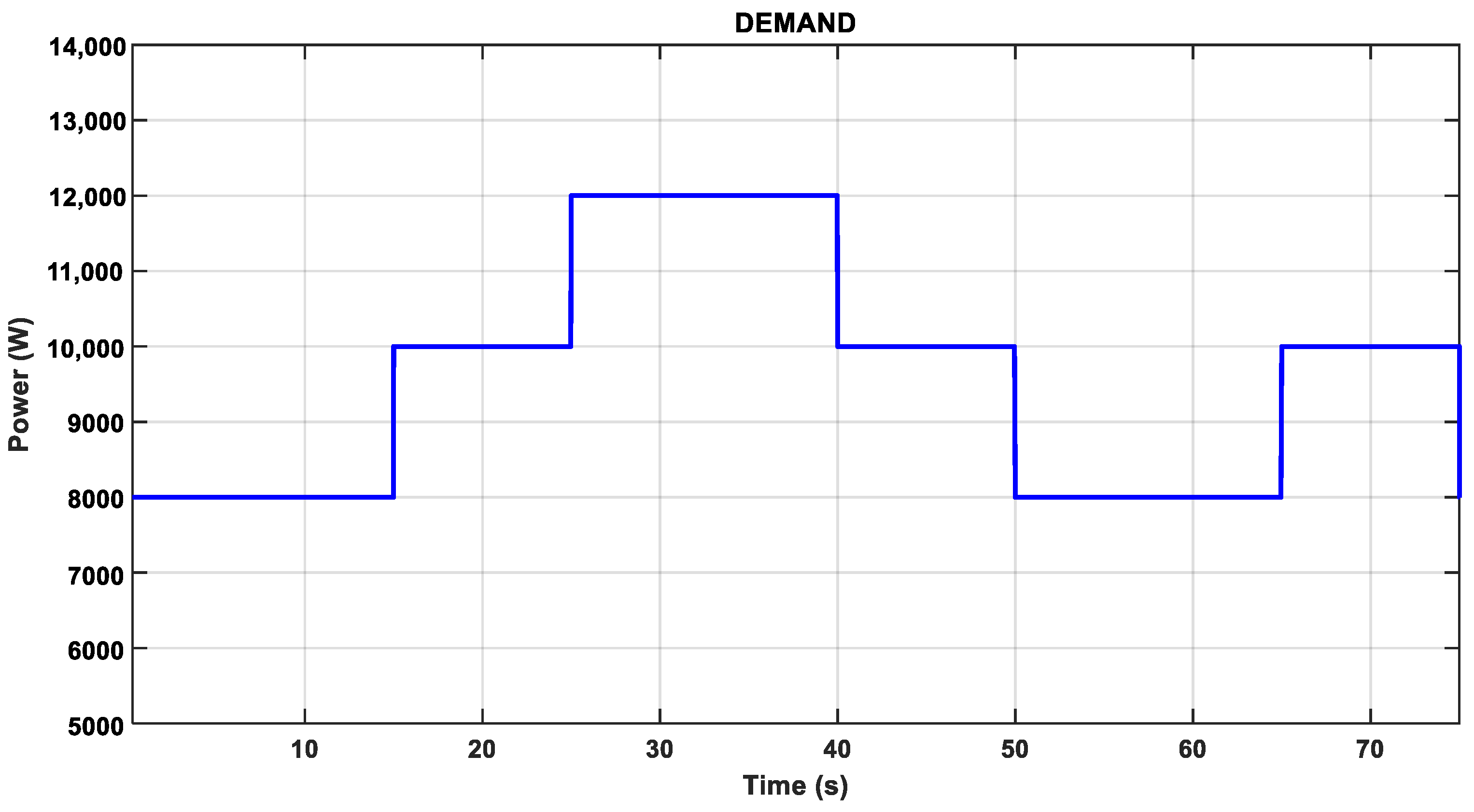
Figure 10) and demand changes (
Figure 11) are shown in
Figure 12 and
Figure 13 for the scenarios with and without EMS. The radiation profile ranges from 400 W/m
2 to a maximum irradiance of 900 W/m
2 at different time intervals.
Given the radiation profile proposed in
Figure 10 and the demand profile as shown in
Figure 11.
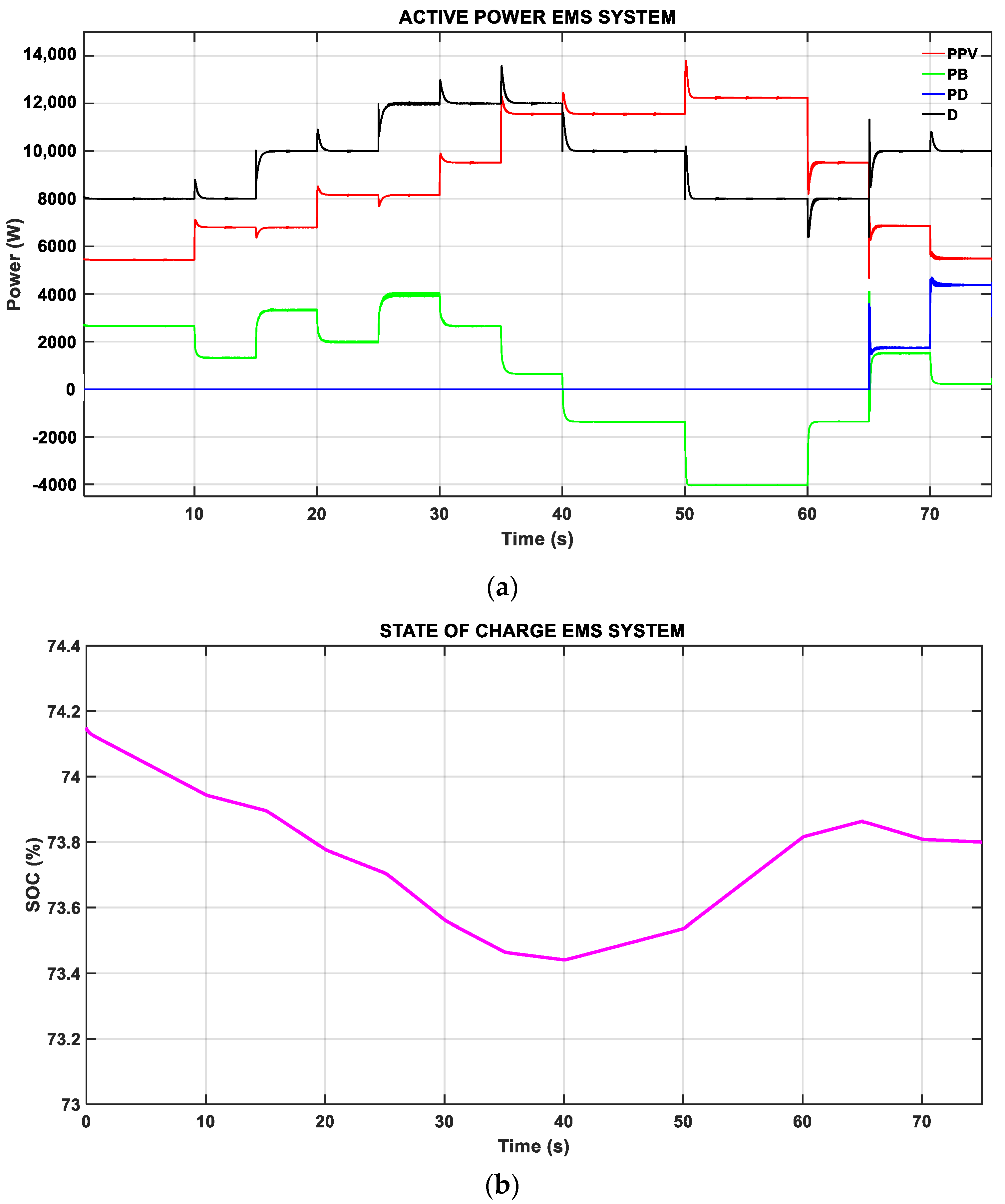
Figure 12 shows the performance of the DC microgrid.
Figure 12a shows the active power distribution when operating with the proposed EMS; this information is also visible in
Table 5. During the time interval from 0 to 10 s, to supply the demand, the photovoltaic panels deliver their maximum power (red line), which is not enough to meet the power balance, so the EMS resolves that the optimal dispatch is that the battery enters the remaining power (green line) to meet the demand (black line). In addition, after 5 s the controller is run again with the updated inputs and measurements, and it can be noted that there is no change in the power distribution. At 10 s, there is an increase in radiation, and it is shown how the battery reduces the power generated to take advantage of the natural resource. At 15 s, there is an increase in demand of 10,000 W, and because the solar power remains equal to the previous operating point of the battery support to meet the power balance, in the interval from 20 to 40 s there is a variation of demand and solar power; however, the demand is always higher, which leads to the battery delivering the necessary missing power to meet the balance of power. In the time intervals from 40 to 65 s, it can be noticed that the photovoltaic power is higher than the power required by the demand, and with the objective of not wasting the natural resource, the battery starts to charge; therefore, they present a negative power, i.e., the battery becomes a load of the microgrid. However, as shown in
Figure 12b, in the intervals from 40 to 65 s, the battery fails to be fully charged and does not reach the upper limit of the SOC (90%), so at second 65, when the solar power is reduced and the demand increases, the battery delivers according to its discharge capacity.
At second 65, the solar power is reduced and the electrical demand increases; this is supplied by the solar power with 6810 W plus the power generated by the battery, which is not fully charged so it delivers according to its discharge characteristics of 1450 W. Therefore, it is not enough to meet the balance of powers, so the EMS integrates the diesel generator (blue line) that supports with 1740 W to supply the demand. Finally, after 70 s the solar power is reduced, and the diesel generator must increase its supply.
The operating costs produced by the diesel generator in the period time of 60 to 65 s is USD 0.00056 and during 70 to 75 s is USD 0.0014, with a total operating cost of USD 0.002, taking into consideration that the commercial cost of diesel in Ecuador is USD 0.0462/lt.
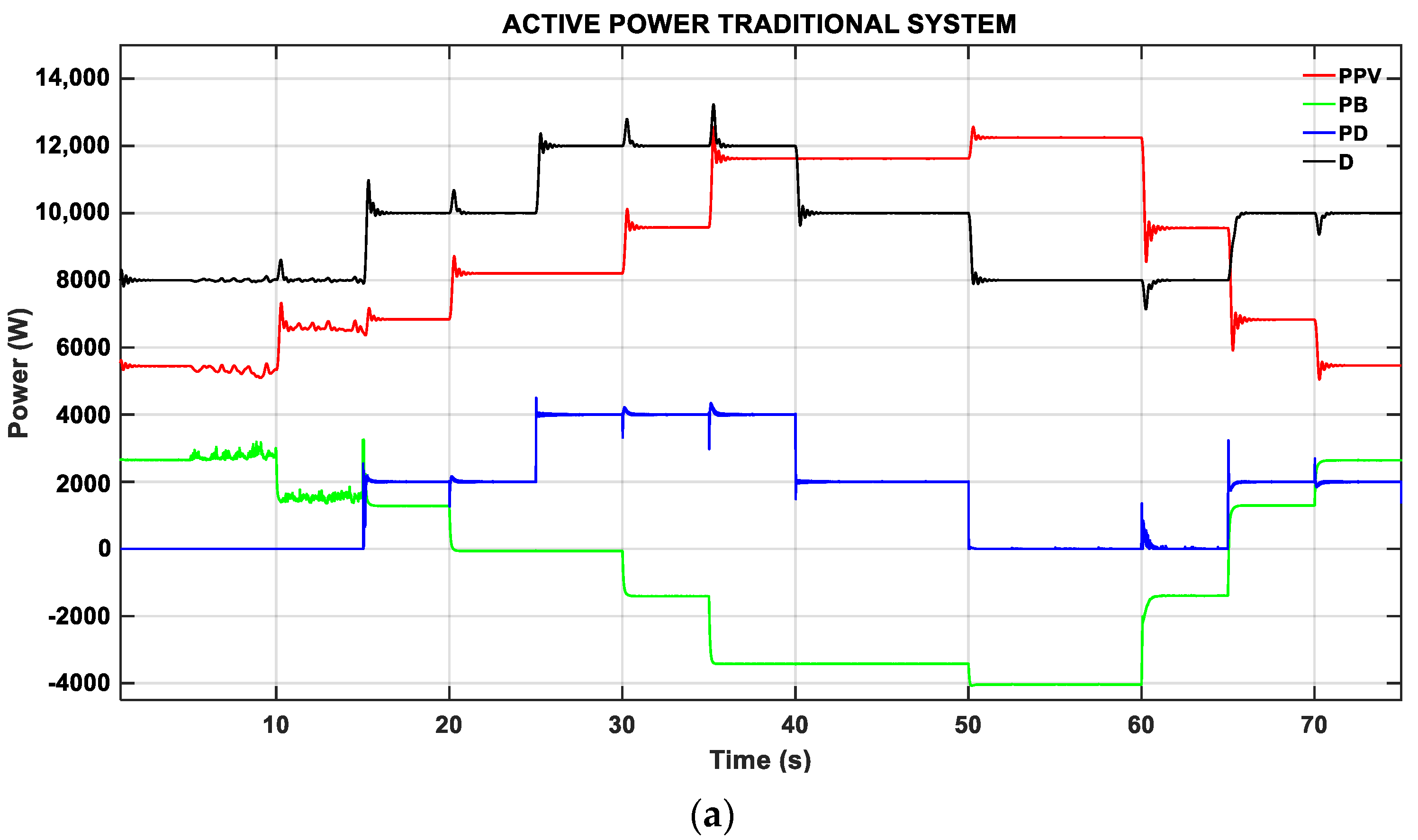
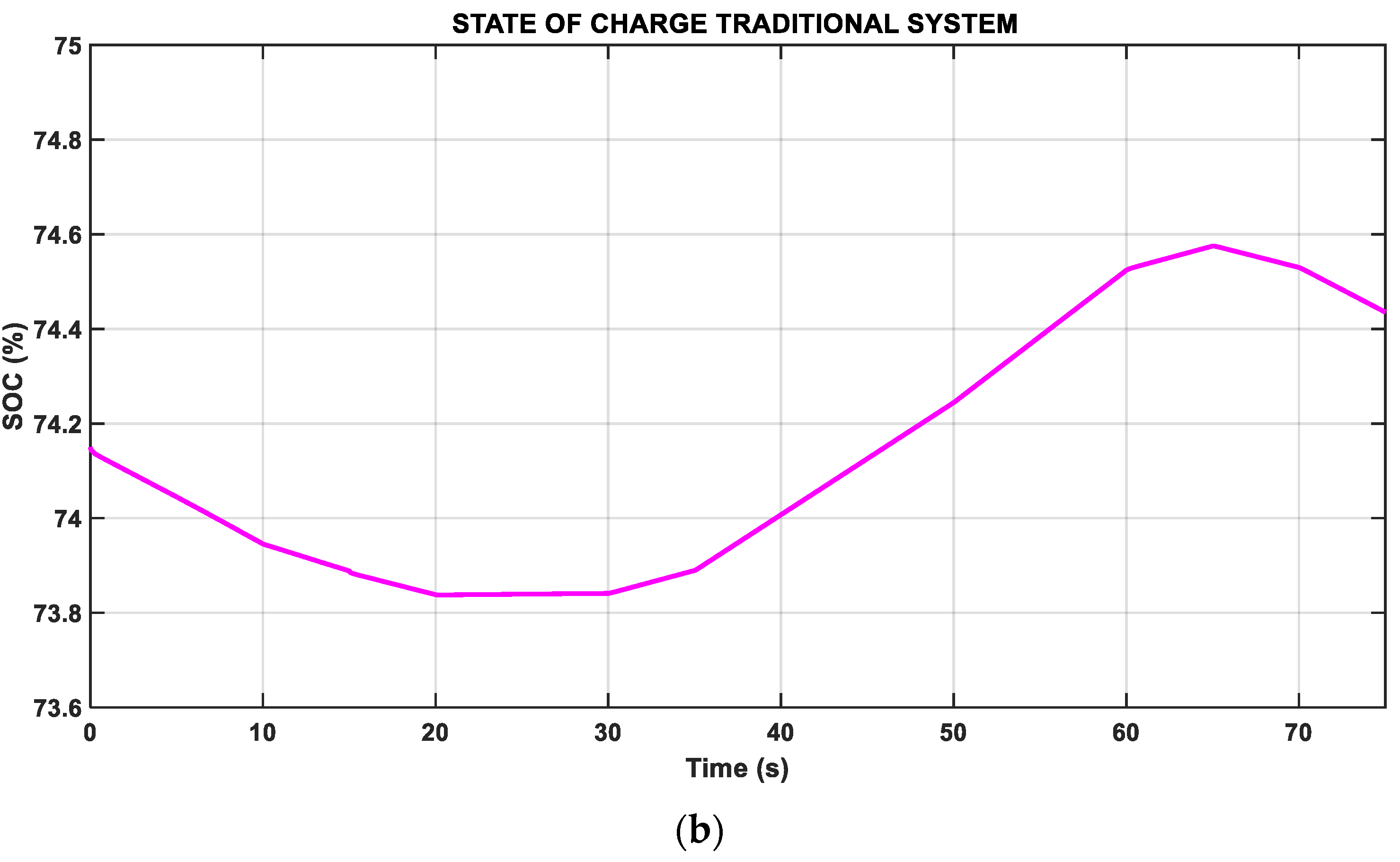
Figure 13 shows the microgrid’s performance without EMS.
Figure 13a shows the distribution of active power by the generation units of the microgrid, without including the optimal EMS dispatch; this information is also visible in
Table 6. During the interval from 0 to 15 s, the demand (black line) is satisfied by the solar generation (red line) and the battery (green line), without the intervention of the diesel generator (blue line). In addition, in the second 15 s, there is an increase in demand of 10,000 W; the solar power remains the same as the previous operating point and it can be noticed how the battery continues to discharge. However, the diesel generator also starts to deliver a power of 2000 W. In the second 20 s, the solar power increases to 8127 W, but with a demand equal to the previous interval; however, the diesel generator continues to generate 2000 W, unlike the operation with EMS (
Figure 12a) in this interval the diesel generator remains off. The operation of the microgrid in the interval from 25 to 40 s shows that the demand is higher than the solar power; in addition, the diesel generator continues delivering the same power of the previous interval, which does not happen in the scenario with EMS because this control calculates the power distribution at a minimum cost, reducing the use of the diesel generator. In the time interval from 40 to 65 s, the demand is completely supplied by the solar power, and because the solar energy is higher than the demand, the surplus energy is stored in the battery, which has negative power, i.e., it becomes a load on the microgrid. Finally, in the last time interval from 65 to 75 s, the demand increases to 10,000 W and the photovoltaic power is reduced; in addition, to supplying the demand the diesel unit delivers 2000 W because there is no controller to properly manage the power. It can be observed that despite there being a variation of photovoltaic power, the diesel generator delivers a constant power. In comparison with the EMS, it can be observed that, in this same time interval, the diesel power is distributed between 65 to 70 s and 70 to 75 s; the photovoltaic power is different so the EMS recalculates and gives the order to the diesel generator to supply the missing power for each case, supplying the demand.
Figure 13b shows how, from 20 s, the battery start with its charging process because the diesel generator starts to supply the missing power to the demand; however, this is not the most economical way to operate the microgrid due to fuel consumption and environmental pollution, despite the battery not being fully charged to its maximum point, so at second 65, when the solar power is reduced and the demand increases, the battery delivers according to its discharge capacity.
The cost of operating the diesel generator without an EMS during the periods of 15 to 25, 40 to 50, and 65 to 75 s is USD 0.00064, respectively, and in the time interval of 25 to 40 s, the cost generated is USD 0.00128, giving a total cost of generation of USD 0.0077.
Implementing the EMS tertiary control working in sliding mode allows us to calculate the optimal solutions for the distribution of power in the microgrid, as shown in
Figure 12a. Through real-time measurements of the variables, it is shown that in most of the simulation period, the diesel generator remains deactivated, to minimize costs. This means that the control algorithm does not activate the auxiliary unit, which is reflected in the reduction of operating costs and reduction of environmental pollution, in addition to extending the life of the battery, preventing it from operating at critical points such as overloads or deep discharges, while complying with the power balance to supply the required demand. While the system without EMS, as shown in
Figure 13a, supplies the demand, because it does not have the optimal power flow management, the power distribution between the supply units and the battery is not efficient, which is why, in the simulation, the diesel unit supplies energy most of the time. In addition, it does not take care of the operation of the battery because they present deep discharges.
5. Conclusions
This paper presents the design of the primary, secondary, and tertiary controllers for a DC microgrid in island operation. The tertiary control (EMS) allows optimal microgrid management, ensuring optimal power distribution and protecting the lifespan of the battery, using real-time measurement feedback that allows it to react to rapid changes in electrical demand and radiation changes. The primary level corresponds to the voltage and current control for the battery to work in charge and discharge mode, while the photovoltaic power includes an MPPT control based on the incremental conductance algorithm, to take full advantage of the solar resource. In addition, this level includes a droop control to perform the power-sharing of the battery. However, this action causes a deviation in the operating voltage of its nominal value, so a second level of control is implemented to restore voltage. Finally, in the third level of control, an EMS is implemented to determine the power each generating unit must deliver to cover the demand while complying with the technical operating constraints and protecting the lifespan of the battery.
The implemented EMS detects disturbances occurring at lower control levels and operates in the face of rapid changes in radiation and electrical demand. Measurements of battery status and available energy are feedback online by the EMS, and predictions are updated. Thus, the optimal decision of battery usage is more efficient, and the algorithm considers battery operating limit constraints to avoid deep discharges.
The EMS reduces the operating cost by 40% compared to the microgrid without the optimal management system in the evaluating horizon by reducing fuel consumption to supply the demand.
In this research work, the optimal performance of the DC microgrid has been validated by evaluating all levels of control, guaranteeing optimal operation in technical terms, i.e., the use of natural resource and economic terms, by obtaining the minimum operating cost and protecting the lifespan of the battery.
The proposed EMS respects the established SOC limits; therefore, it does not reach deep discharges and mainly presents an optimal operation where the charge and discharge decisions are made by the EMS, i.e., they are taken according to the availability of the natural resource and the minimum cost for the DC microgrid.
Having the design and implementation of the three levels of control allows for identifying the impact that each level has on the EMS and how the disturbances affect the optimal operation. This is why, in our proposal, EMS, by updating the measurements that represent the short-term inputs, can respond to changes detected in the lower levels of control, i.e., when disturbances occur; therefore, the operation of the DC microgrid is integral.
It is determined as future work that within the optimization problem we can add the restrictions of the diesel generator start-up time and modeling of the battery degradation. In addition, we can include the modeling and restriction of the electrical network connected to the microgrid, allowing an increase in the energy supply capacity of the system. From a control point of view, our main future work will focus on a comparison between a centralized and a distributed system of DC microgrids.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}