
An SMC-MRAS Speed Estimator for Sensor-Less Control of DFIG Systems in Wind Turbine Applications


Abstract
:1. Introduction
- 1.
- The proposed SMC-MRAS estimator uses the rotor current as a variable of interest.
- 2.
- The use of the Lyapunov stability criteria in order to determine the SMC gains of the SMC-MRAS estimator.
- 3.
- The use of the proposed SMC helps to reduce the sensitivity to machine parameter variations.
- 4.
- A comparative study between the proposed SMC-MRAS estimator and the PI-MRAS estimator discussed in [34] is presented. It is shown that the estimation performance from the proposed SMC-MRAS estimator is better under machine parameter variations and under a rapid change in the wind speed.
2. DFIG Modelling
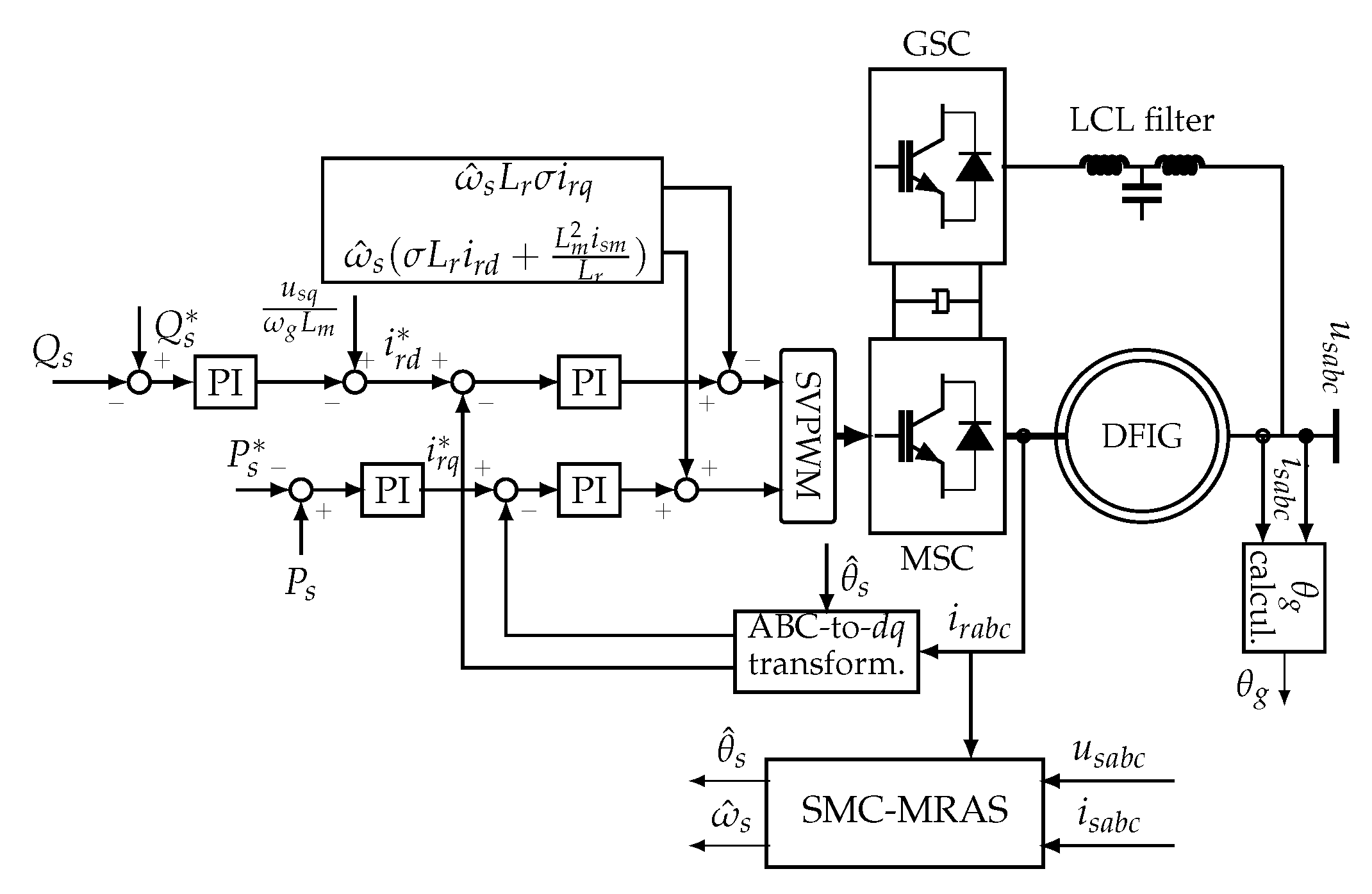
3. Sensor-Less Control Strategy
3.1. Reference Active and Reactive Powers
3.2. Outer Control Loops
3.3. Inner Control Loops
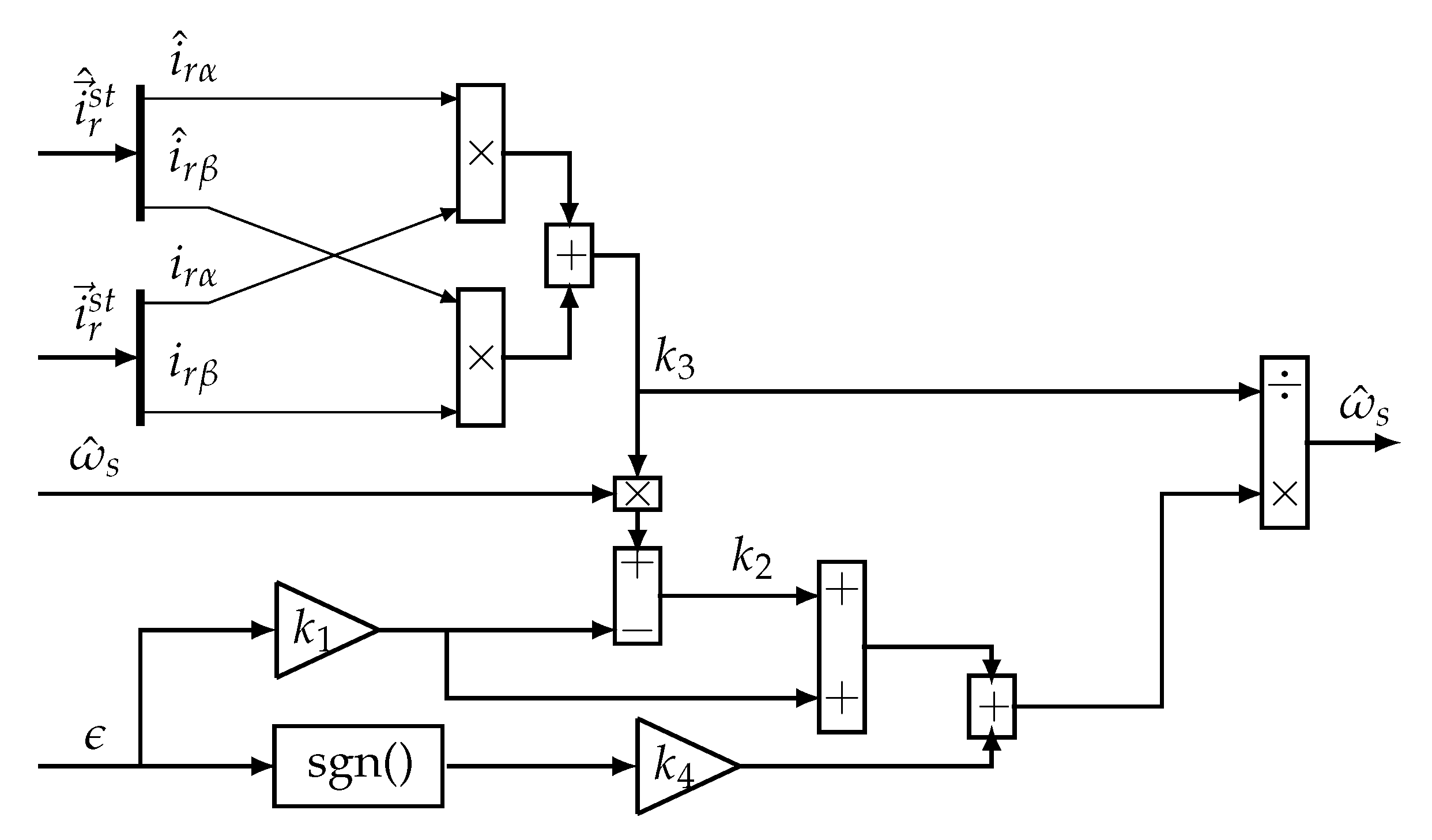
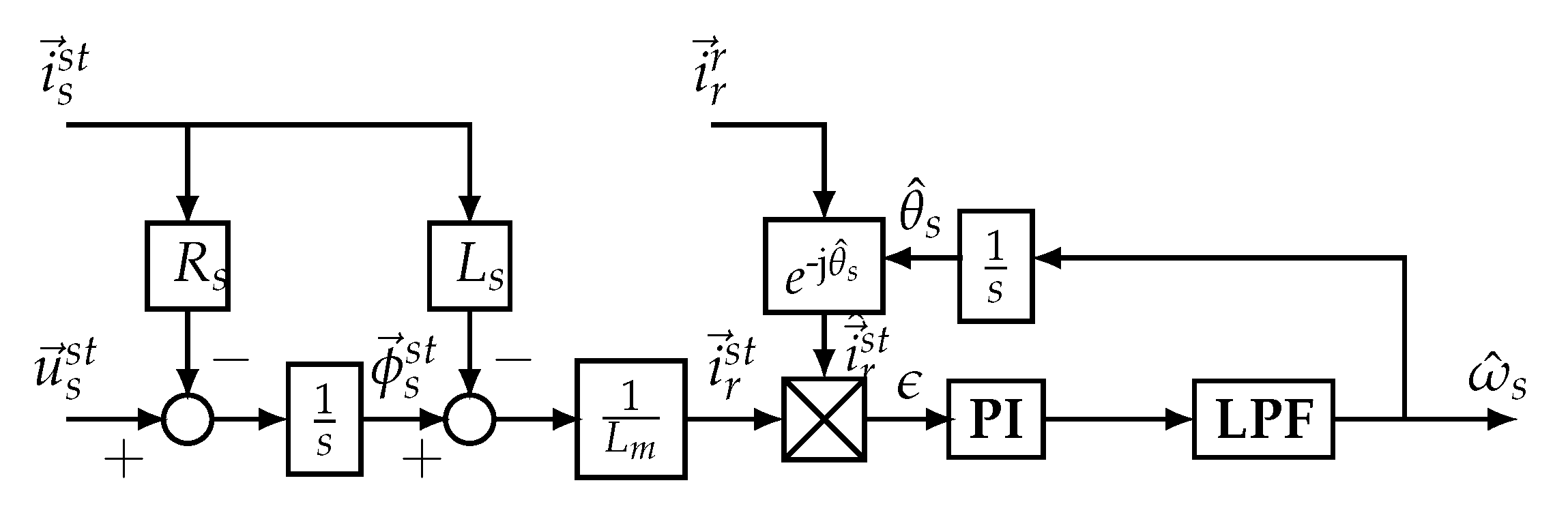
4. SMC-MRAS Estimator Design
4.1. Proposed SMC-MRAS Estimator
4.2. Reference Model
4.3. Adjustable Model
4.4. Design of the SMC-Based Adaptive Mechanism
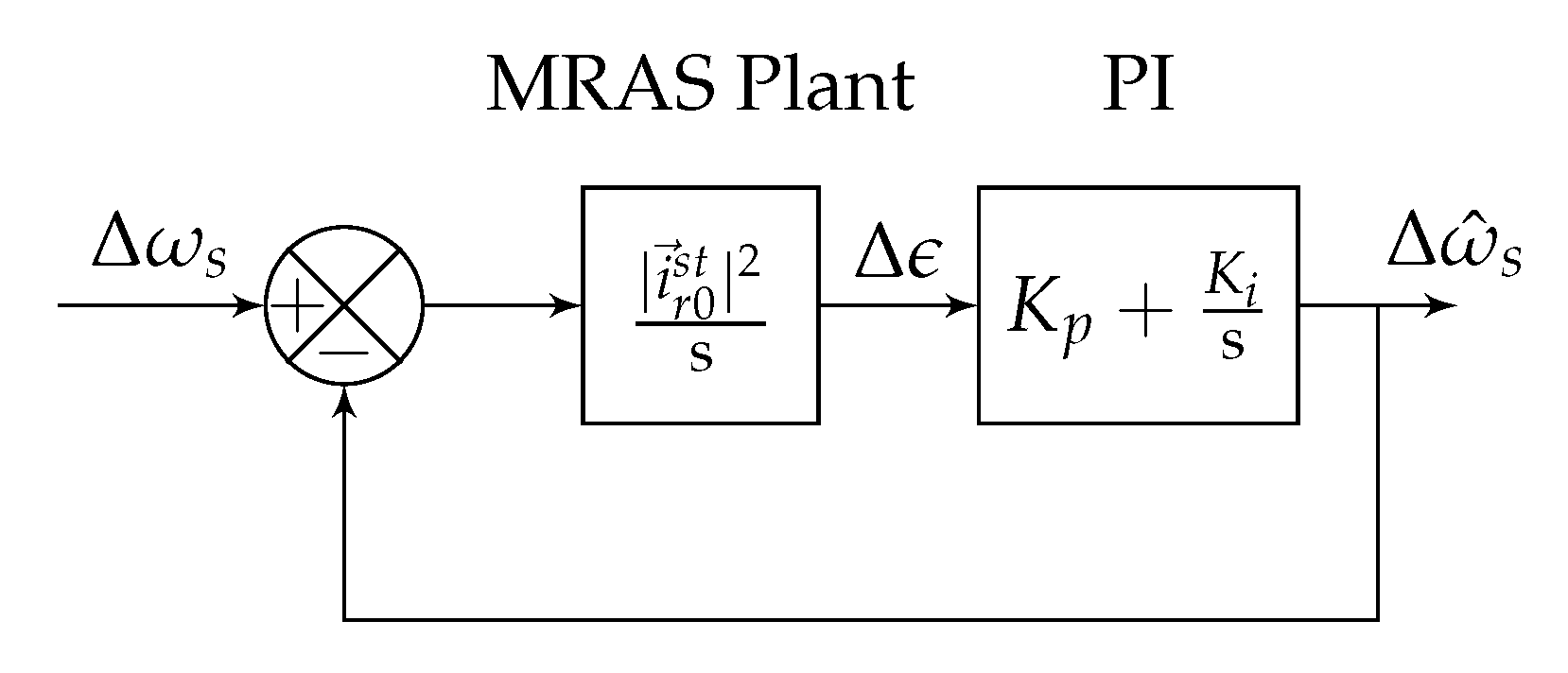
4.5. Stability Analysis
4.6. Determination of and
4.7. First-Order Filter Design
5. PI-MRAS Estimator
6. Simulation Results
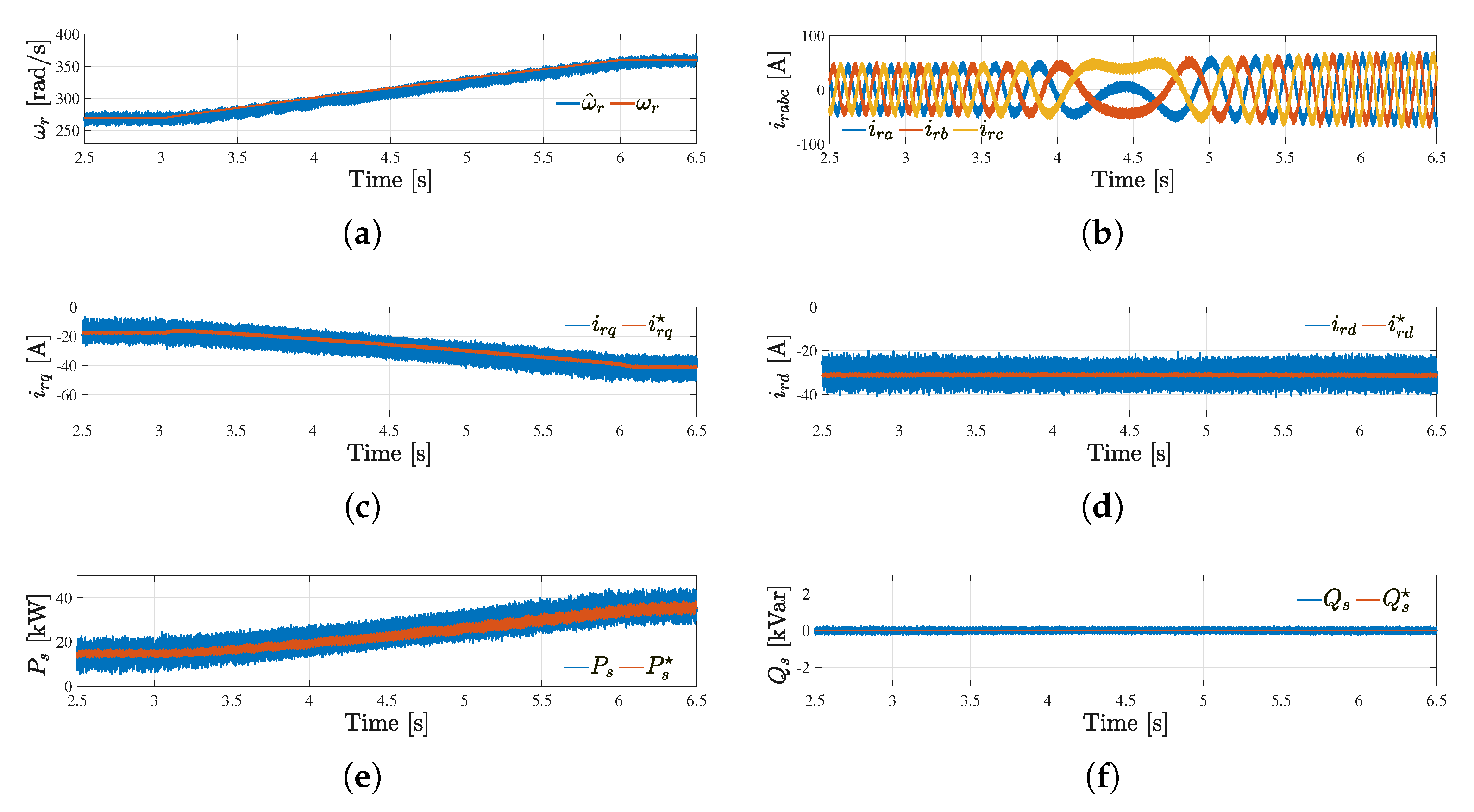
6.1. Performance of the SMC-MRAS-Based Sensor-Less Control Strategy
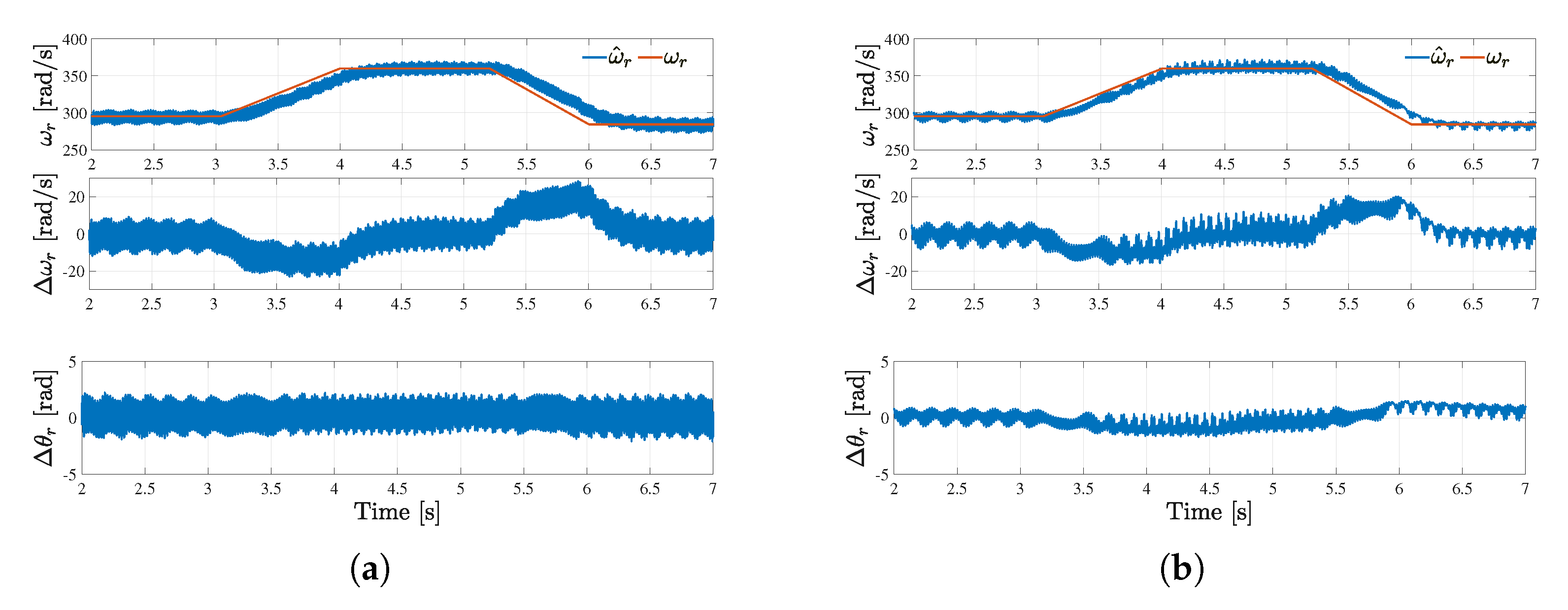
6.2. Performance under Steady Change in Rotor Speed
6.3. Performance under Step Change in the Reference Stator Active Power
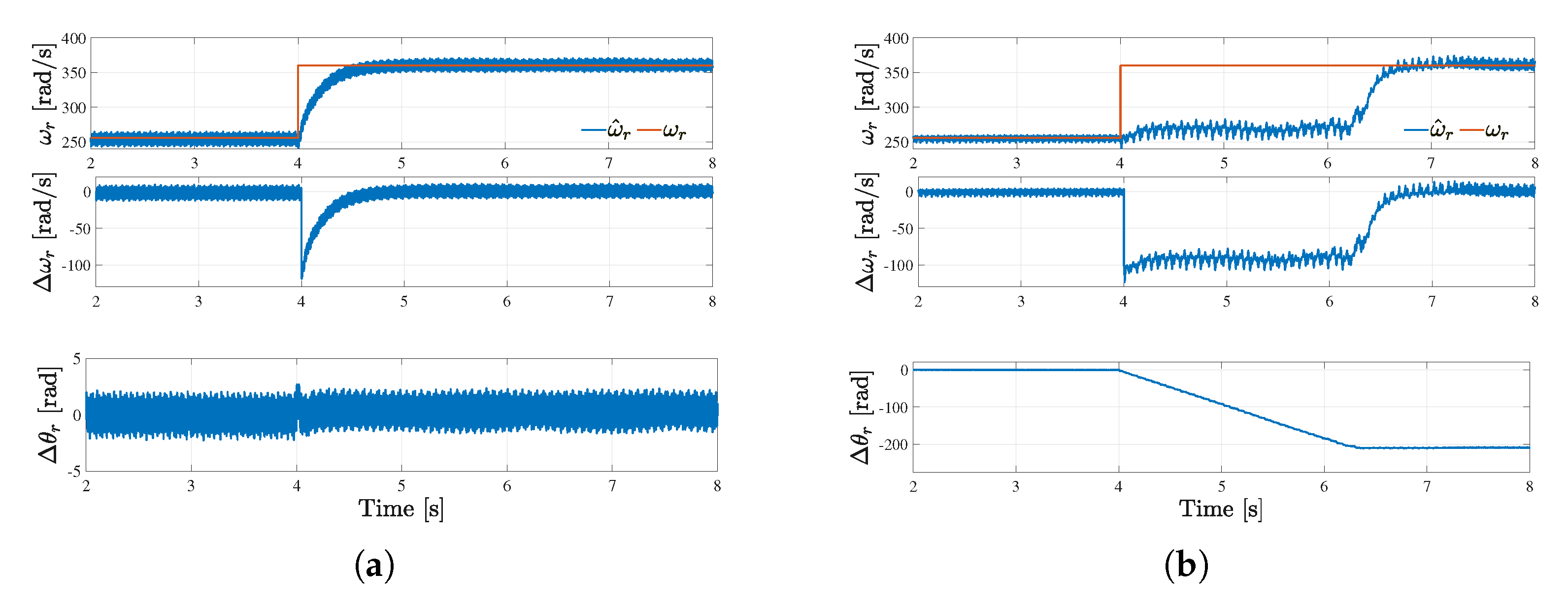
6.4. Performance under Machine Parameter Variations (1.3)
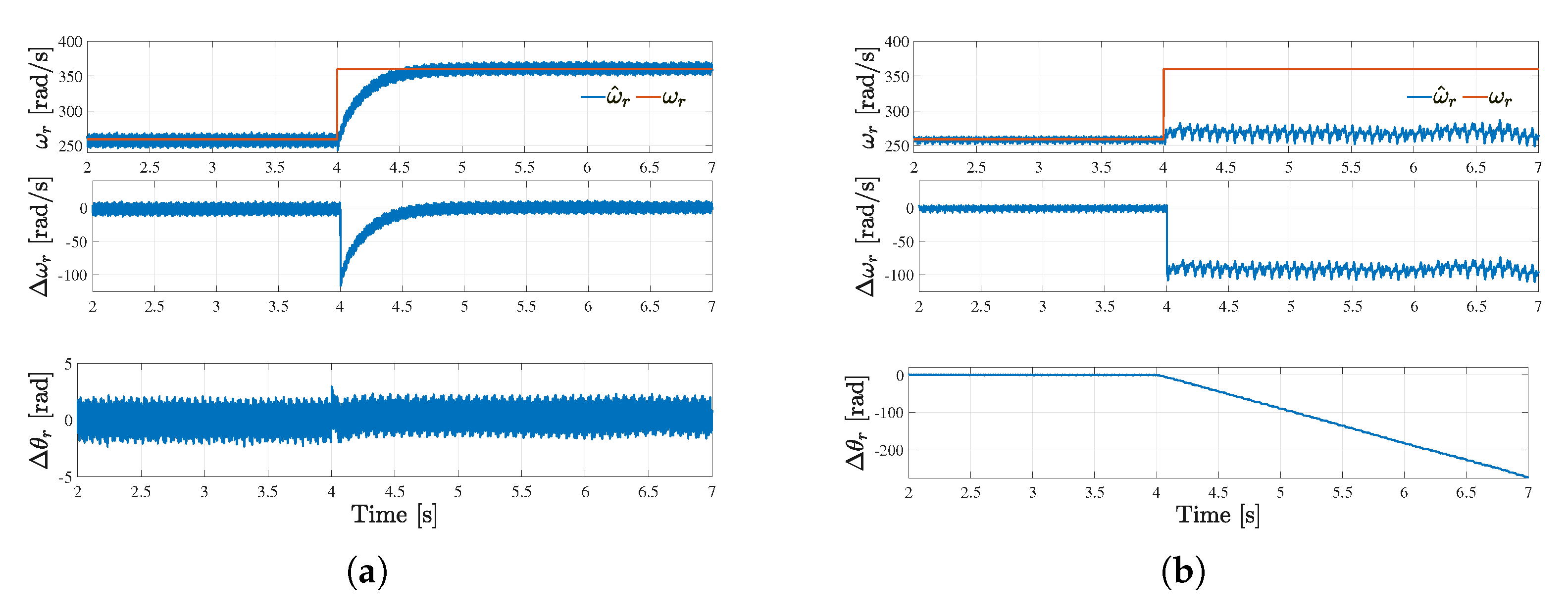
6.5. Performance under Machine Parameter Variations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly-fed induction generator using back-to-back PWM converters and its applications to variable-speed wind energy generation. IEE Proc.-Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef] [Green Version]
- Muller, S.; Deicke, M.; Doncker, R.W.D. Doubly-fed induction generators systems for wind turbines. IEEE Trans. Ind. Appl. 2002, 8, 26–33. [Google Scholar] [CrossRef]
- Tazil, M.; Kumar, V.; Bansal, R.C.; Kong, S.; Dong, Z.Y.; Freites, W.; Mathur, H.D. Three-phase doubly-fed induction generators: An overview. IET Electr. Power Appl. 2010, 4, 75–89. [Google Scholar] [CrossRef]
- Polinder, H.; Ferreira, J.A.; Jensen, B.B.; Abrahamsen, A.B.; Atallah, K.; McMahon, R.A. Trends in Wind Turbine Generator Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 174–185. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Alepuz, S.; Asher, G. Overview of control systems for the operation of DFIGs in wind energy applications. IEEE Trans. Ind. Electron. 2013, 60, 2776–2798. [Google Scholar] [CrossRef]
- Goel, P.K.; Singh, B.; Murthy, S.S.; Kishore, N. Parallel Operation of DFIGs in Three-Phase Four-Wire Autonomous Wind Energy Conversion System. IEEE Trans. Ind. Appl. 2011, 47, 1872–1883. [Google Scholar] [CrossRef]
- Tapia, A.; Tapia, G.; Ostolaza, J.X.; Saenz, J.R. Modeling and control of a wind turbine driven doubly fed induction generator. IEEE Trans. Energy Convers. 2003, 18, 194–204. [Google Scholar] [CrossRef] [Green Version]
- Reigosa, D.D.; Briz, F.; Charro, C.B.; di Gioia, A.; Garcia, P.; Guerrero, J.M. Sensorless Control of Doubly Fed Induction Generators Based on Rotor High-Frequency Signal Injection. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2268–2275. [Google Scholar]
- Xu, L.; Inoa, E.; Liu, Y.; Guan, B. A New High-Frequency Injection Method for Sensorless Control of Doubly Fed Induction Machines. IEEE Trans. Ind. Appl. 2012, 48, 1556–1564. [Google Scholar] [CrossRef]
- Tshiloz, K.; Vilchis–rodriguez, D.; Djukanovic, S.; Sarma, N.; Djurovic, S. Sensorless speed estimation in wound rotor induction machines by spectral search of the stator phase power. IET Electr. Power Appl. 2016, 10, 581–592. [Google Scholar] [CrossRef]
- Mbukani, M.W.K.; Gule, N. Comparison of high-order and second-order sliding mode observer based estimators for speed sensorless control of rotor-tied DFIG systems. IET Power Electron. 2019, 12, 3231–3241. [Google Scholar] [CrossRef]
- Mbukani, M.W.K.; Gule, N. PLL-Based Sliding Mode Observer Estimators for Sensorless Control of Rotor-Tied DFIG Systems. IEEE Trans. Ind. Appl. 2019, 55, 5960–5970. [Google Scholar] [CrossRef]
- Mbukani, M.W.K.; Gule, N. Performance Analysis of a PLL-Based Sensor-Less Control of Rotor-Tied DFIG Systems. In Proceedings of the 2018 IEEE 9th International Symposium on Sensorless Control for Electrical Drives (SLED), Helsinki, Finland, 13–14 September 2018; pp. 48–53. [Google Scholar] [CrossRef]
- Mbukani, M.W.K.; Gule, N. Evaluation of an STSMO-based estimator for power control of rotor-tied DFIG systems. IET Electr. Power Appl. 2019, 13, 1871–1882. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Kennel, R. Sensorless Control of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems. In Proceedings of the 5th International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015; pp. 406–413. [Google Scholar]
- Solanki, U.; Prajapat, G.P.; Jha, P. Unscented Kalman Filter based Mechanical Parameter Estimation of Wind Power Systems. In Proceedings of the 2019 8th International Conference on Power Systems (ICPS), Jaipur, India, 20–22 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Yu, S.; Fernando, T.; Iu, H.H.C.; Emami, K. Realization of State-Estimation-Based DFIG Wind Turbine Control Design in Hybrid Power Systems Using Stochastic Filtering Approaches. IEEE Trans. Ind. Inform. 2016, 12, 1084–1092. [Google Scholar] [CrossRef]
- Shen, B.; Mwinyiwiwa, B.; Zhang, Y.; Ooi, B.-T. Sensorless maximum power point tracking of wind by DFIG using rotor position phase lock loop (PLL). IEEE Trans. Power Electron. 2009, 24, 942–951. [Google Scholar] [CrossRef]
- Mbukani, M.W.K.; Gule, N. Implementation of an SMO-based MRAS Estimator for Sensor-less Control of RDFIG Systems. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 1143–1149. [Google Scholar] [CrossRef]
- Iacchetti, M.F. Adaptive tuning of the stator inductance in a rotor-current based MRAS observer for sensorless doubly fed induction-machine drives. IEEE Trans. Ind. Electron. 2011, 58, 4683–4692. [Google Scholar] [CrossRef]
- Mbukani, M.W.K.; Gitau, M.N.; Naidoo, R.; Masike, L. A torque-based MRAS estimator for position/speed sensor-less control of DFIG systems. IEEE ONCON 2022, accepted. [Google Scholar]
- Benlaloui, I.; Drid, S.; Chrifi-Alaoui, L.; Ouriagli, M. Implementationof a new MRAS speed sensorless vector control of induction machine. IEEE Trans. Energy Convers. 2015, 30, 588–595. [Google Scholar] [CrossRef]
- Soltani, J.; Mizaeian, B. Simultaneous speed and rotor time constant identification of an induction motor drive based on the model reference adaptive system combined with a fuzzy resistance estimator. In Proceedings of the 1998 International Conference on Power Electronic Drives and Energy Systems for Industrial Growth, Perth, WA, Australia, 1–3 December 1998; pp. 739–744. [Google Scholar]
- Orlowska-Kowalska, T.; Dybkowski, M. Stator-current-based MRAS estimator for a wide range speed-sensorless induction-motor drive. IEEE Trans. Ind. Electron. 2010, 57, 1296–1308. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Kennel, R. Limited-Position Set Model-Reference Adaptive Observer for Control of DFIGs without Mechanical Sensors. Machines 2020, 8, 72. [Google Scholar] [CrossRef]
- Azza, H.B.; Zaidi, N.; Jemli, M.; Boussak, M. Development and experimental evaluation of a sensorless speed control of SPIM using adaptive sliding mode-MRAS strategy. IEEE J. Emerg. Sel. Topics Power Electron. 2014, 2, 319–328. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. Stator current model reference adaptive systems speed estimator for regenerating-mode low-speed operation of sensorless induction motor drives. IET Electr. Power Appl. 2013, 7, 597–606. [Google Scholar] [CrossRef] [Green Version]
- Rashed, M.; Stronach, A.F. A stable back-EMF MRAS-based sensorless low speed induction motor drive insensitive to stator resistance variation. IEE Proc.-Electr. Power Appl. 2004, 151, 685–693. [Google Scholar] [CrossRef]
- Tamai, S.; Sugimoto, H.; Masao, Y. Speed sensorless vector control of induction motor with model reference adaptive system. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Atlanta, GA, USA, 18–23 October 1987; pp. 189–195. [Google Scholar]
- Kumar, R.; Das, S.; Syam, P.; Chattopadhyay, A. Review on model reference adaptive system for sensorless vector control of induction motor drives. IET Electr. Power Appl. 2015, 9, 496–511. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Clare, J.; Asher, G.; Proboste, J. MRAS Observers for sensoless control of Doubly-fed Induction Generators. IEEE Trans. Power. Electr. 2008, 23, 1075–1084. [Google Scholar] [CrossRef]
- Maiti, S.; Verma, V.; Chakraborty, C.; Hori, Y. An Adaptive Speed Sensorless Induction Motor Drive with Artificial Neural Network for Stability Enhancement. IEEE Trans. Ind. Inform. 2012, 8, 757–766. [Google Scholar] [CrossRef]
- Lu, L.; Yeh, T.; Chu, C. Back-EMF-based model-reference adaptive sensorless control for grid-connected DFIGs. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Iwanski, G.; Szypulski, M.; Luszczyk, T.; Pura, P. Cross and dot product based MRAS Observer of the rotor position of doubly fed induction machine. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 25–27 March 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Pena, R.; Cardenas, R.; Proboste, J.; Asher, G.; Clare, J. Sensorless Control of Doubly-Fed Induction Generators Using a Rotor-Current-Based MRAS Observer. IEEE Trans. Ind. Electr. 2008, 55, 330–339. [Google Scholar] [CrossRef]
- Morshed, M.J.; Sardoueinasab, Z.; Fekih, A. A Sliding Mode Disturbance Observer-Based Approach for Grid Connected Wind Energy Systems. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 5719–5724. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.; Rodriguez, J.; Kennel, R. Improved Direct-Model Predictive Control with a Simple Disturbance Observer for DFIGs. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE 20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. pp. P.1–P.9. [CrossRef]
- Penne, M.; Qiao, W.; Qu, L.; Huang, R.; Huang, Q. Active Disturbance Rejection Control of Doubly-Fed Induction Generators Driven by Wind Turbines. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 965–972. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of the Quantity | Symbol | Value |
|---|---|---|
| Nominal power | 37.3 kW | |
| Nominal line-to-line stator voltage | 415 V | |
| Nominal line-to-line rotor voltage | 415 V | |
| Rotor resistance | 0.09961 | |
| Stator resistance | 0.05837 | |
| Magnetizing inductance | 0.03039 H | |
| Rotor inductance | 0.031257 H | |
| Stator inductance | 0.031257 H | |
| Inertia | J | 0.00134 |
| pole-pairs | P | 3 |
| Wind turbine coefficient | 0.00685 |
| Gains | Values |
|---|---|
| Outer PI gains | = 0.0727 and = 17.54 |
| Inner PI gains | = 0.089 and = 3.04534 |
| PI-MRAS gains | = 5 and = 50 |
| SMC-MRAS gains | = 1 and = 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mbukani, M.W.K.; Gitau, M.N.; Naidoo, R. An SMC-MRAS Speed Estimator for Sensor-Less Control of DFIG Systems in Wind Turbine Applications. Energies 2023, 16, 2633. https://doi.org/10.3390/en16062633
Mbukani MWK, Gitau MN, Naidoo R. An SMC-MRAS Speed Estimator for Sensor-Less Control of DFIG Systems in Wind Turbine Applications. Energies. 2023; 16(6):2633. https://doi.org/10.3390/en16062633
Chicago/Turabian StyleMbukani, Mwana Wa Kalaga, Michael Njoroge Gitau, and Raj Naidoo. 2023. "An SMC-MRAS Speed Estimator for Sensor-Less Control of DFIG Systems in Wind Turbine Applications" Energies 16, no. 6: 2633. https://doi.org/10.3390/en16062633