
Generalized Method of Mathematical Prototyping of Energy Processes for Digital Twins Development

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Description of the Energy Processes Mathematical Prototyping Method
- Topology matrix ;
- The expression for the free energy , expressed in terms of , or its partial derivatives by the state coordinates , taken with the “-” sign , satisfying the total differential condition;
- Positively defined dissipative matrix ;
- Functions and , obtained from the definition of the measured and controlled parameters of the system, respectively.
- Topology matrix ;
- Positively defined dissipative matrix ;
- Jacobi matrices , and , of measured and controlled parameters of the system respectively, satisfying the conditions of the total differential [38]:where:
- Partial derivatives by the coordinates of the state of free energy , satisfying the conditions of the total differential [38]:
- Functions of measured and controlled parameters (which can be functionals of , , and dynamics).
- Power polynomials, whose convergence is guaranteed by the Weierstrass theorem on the uniform approximation of functions by polynomials [21];
- Classes of interpolation expressions (linear, cubic splines, Lagrange interpolation polynomials, etc.) [44].
- Step methods based on calculating the values of a dynamic variable at subsequent time points from the previous values of this variable;
- Special methods based on the approximation of solutions to a system of differential equations by analytical expressions.
- The replacement of the state coordinates does not affect the fact that the balance parameters of the system are changed by external flows, it follows from Equations (32) and (33);
- If the analytical solution in the old coordinate system tends to the stationary state from any initial state, then the solution in the new coordinate system also tends to the stationary state from any initial state, it follows from Equation (31);
- If the analytical solution in the old coordinate system satisfies the group condition, then in the new coordinate system the solution also satisfies the group condition [47].
- Transformations of the coordinate system of the state space to simplify the expressions of the state functions of the properties of substances and processes;
- Transformations of the equations of the mathematical prototyping method with respect to the measured and controlled parameters;
- Splitting the space of the system state coordinate into regions in order to obtain piecewise simplified state functions for the properties of substances and processes;
- Reduction of the procedure for obtaining analytical solutions to the equations of the mathematical prototyping method for state coordinates to the problem of finding a global minimum.
3. Algorithm of Obtaining the Model from Experimental Data
3.1. The Sequence of Obtaining Controlled Parameters
3.2. Implementation of the Algorithm for Obtaining Controlled Parameters
4. Results
4.1. An Example of a Nickel–Cadmium Battery
4.1.1. Physical and Chemical Processes in a Nickel–Cadmium Accumulator
4.1.2. Assumptions Imposed on the Mathematical Model of Physicochemical Processes in the Nickel–Cadmium Accumulators
- Aging processes in the accumulators are not modeled (due to the fact that they proceed much more slowly than main processes);
- Hydrogen release is not simulated (the nickel–cadmium accumulators are fairly new) [56];
- Distribution of water in the volume of the separator is even;
- The volume of the separator is divided into near-anode and near-cathode regions, and the state of each region is characterized by averaged values of the distributed quantities;
- Physical and chemical processes between each pair of electrodes are identical, therefore, the accumulators are represented with one pair of electrodes, on which the above processes occur;
- The temperature of the accumulators is uniform;
- Cross-diffusion of hydroxide ions and oxygen molecules is absent;
- The oxygen above the separator is in equilibrium with the oxygen in the separator;
- The contact of the base of the positive and negative electrodes with their spattering is ideal;
- The “memory effect” [56] of a nickel–cadmium accumulators is not taken into account;
- Capacities of double layers of positive and negative electrodes are not taken into account.
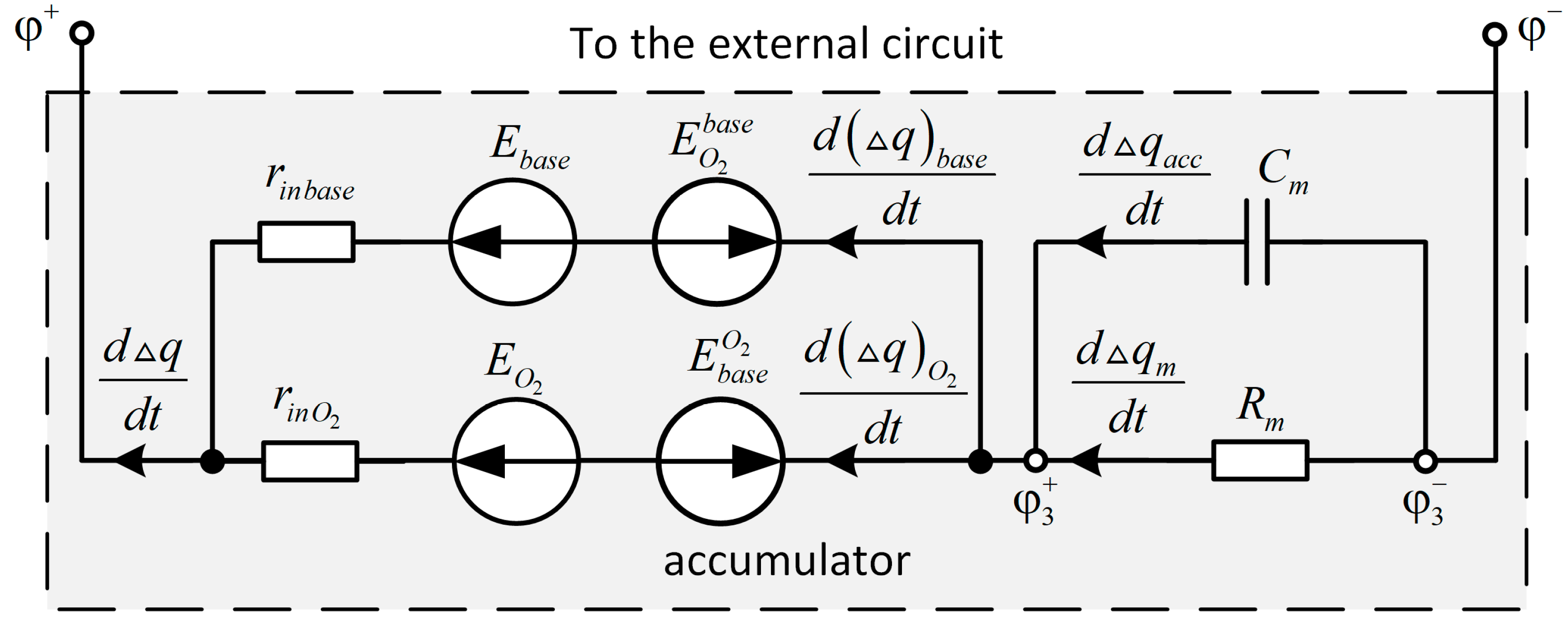
4.1.3. Mathematical Model of Physical and Chemical Processes in a Nickel–Cadmium Accumulator
- Charge transferred through an external circuit, , A∙h;
- Current in the external circuit, , A;
- Current through the membrane , A
- Component of the current in the external circuit, due to the main current-generating processes, , A;
- Charge accumulated in the membrane , A∙h;
- Component of the current in the external circuit, due to the release of oxygen, , A;
- Membrane resistance , Ohm;
- Membrane capacity , F;
- Internal resistance due to the main current-generating processes , Ohm;
- Internal resistance due to the release of oxygen , Ohm;
- EMF of the main current-generating processes , V;
- EMF due to the release of oxygen , V;
- Cross EMF for the main current, due to the release of oxygen , V;
- The coefficient of cross-EMF for the main current, due to the release of oxygen , V;
- Cross EMF for the current associated with the release of oxygen, due to the main current, , V;
- Cross-EMF coefficient for the current associated with the release of oxygen, due to the main current, , V;
- Electrical potentials of the positive and negative electrodes, respectively, V;
- The number of moles of accumulated oxygen in the electrode regions of the positive and negative electrodes, respectively;
- The number of moles of oxygen released at the positive electrode and utilized at the negative electrode ;
- The number of moles of oxygen diffused through the membrane ;
- Chemical potentials of oxygen in the anode region and cathode region , J/mol;
- Equilibrium chemical potential of oxygen , J/mol;
- Thermal coefficient for the main current ;
- Thermal coefficient for the main current associated with the release of oxygen at the positive electrode ;
- Thermal coefficients of oxygen diffusion through the electrolyte membrane and oxygen utilization at the negative electrode ;
- Heat capacity of the accumulator, , J/K;
- Heat release power in the accumulator, , W;
- Heat transfer coefficient of the accumulator, , W/(m2∙K);
- Heat transfer area, , m2;
- Accumulator temperature, , ambient temperature, , K.
- Stoichiometric ratios:
- Equations of the conservation law of oxygen mass:
- Equivalent circuit equations for electrochemical processes (Figure 1):
- Oxygen diffusion equations and oxygen utilization equations:
- Heat release power:
- Equations of thermal coefficients:
- Heat balance equation:
- The parameters of the equivalent circuit (Figure 1);
- The function of the oxygen chemical potential;
- The oxygen chemical potential at equilibrium;
- Coefficients of diffusion and utilization of oxygen.
4.1.4. Identification of the Substances and Processes Properties in a Nickel–Cadmium Battery
- The oxygen cycle is assumed to be stationary—how much oxygen was released on the nickel oxide electrode, the same amount diffused to the cadmium electrode, the same amount was utilized on the electrode;
- The diffusion coefficient of oxygen through the membrane is constant;
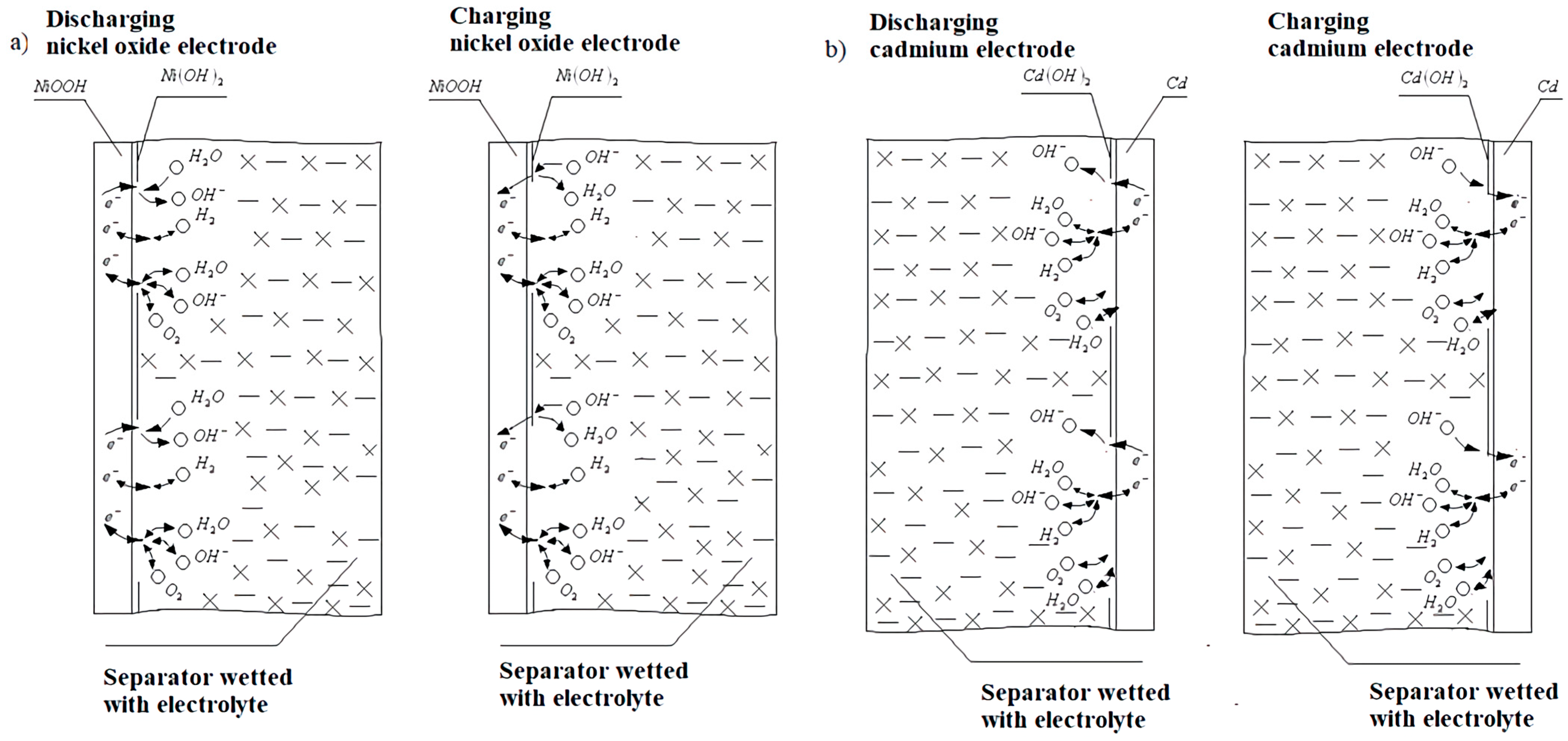
- The main current-forming reactions (46) and (47) in the forward direction proceed on the regions of the corresponding electrodes free from the hydroxide film, in the reverse direction, on the regions covered with the hydroxide film (Figure 2);
- The reaction of release (48) and utilization (49) of oxygen on the corresponding electrodes proceeds only on the areas of these electrodes free from the hydroxide film (Figure 2);
- The area of the hydroxide film covering the electrodes is directly proportional to the number of moles of the corresponding hydroxides (Figure 2);
- The reactivity coefficients of the main current-forming reactions do not depend on the number of moles of oxygen in the near-electrode region;
- The capacity and resistance of the membrane do not depend on the current and the redistributed charge ;
- The dependences of the reactivity coefficients of electrochemical reactions on the redistribution of the electrolyte in the active sites are similar to each other;
- The parameters of a nickel–cadmium accumulator at temperatures below the critical temperature at which the development of thermal acceleration begins do not depend on temperature;
- The heat capacity and heat transfer coefficient of the battery are constant throughout the charge/discharge process.
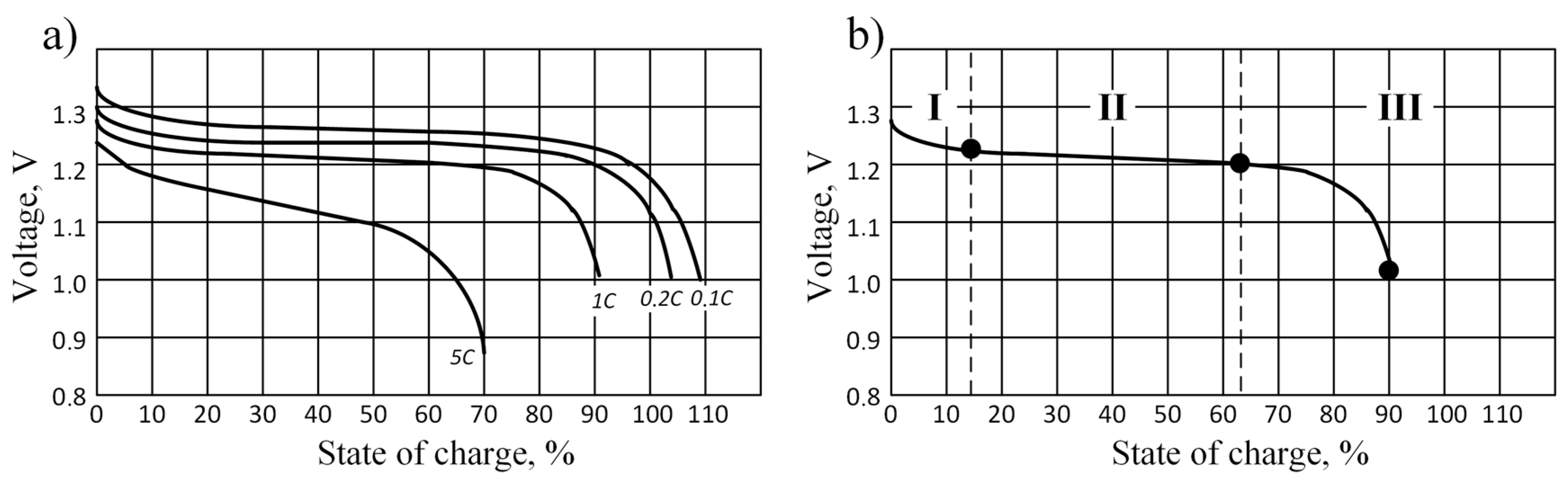
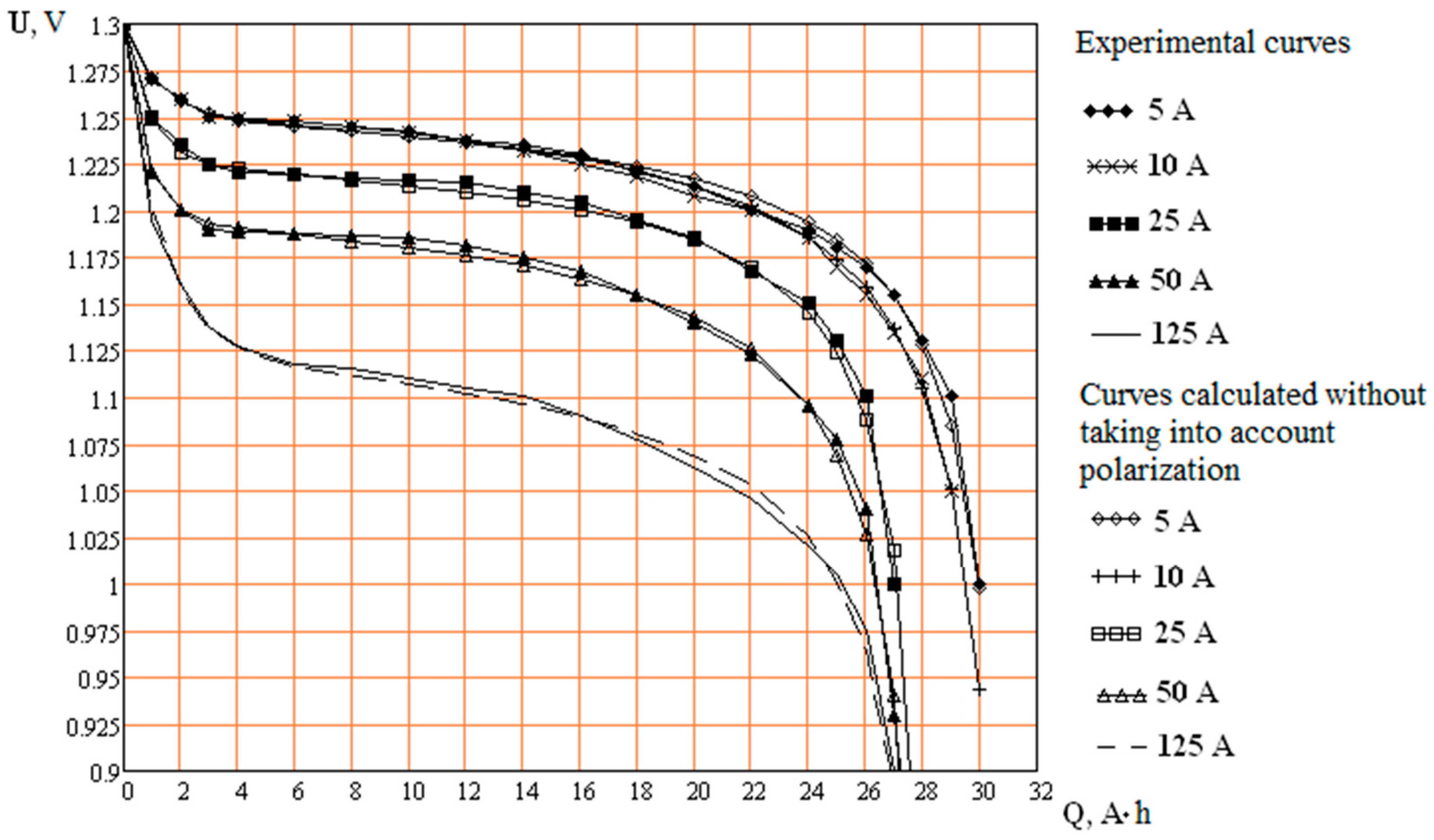
- Section I (Figure 3b) corresponds to a decrease in the discharge voltage associated with the polarization (redistribution) of the electrolyte;
- In sections II and III (Figure 3b), the battery is discharged solely by filling the electrodes with products of the corresponding electrochemical reactions (hydroxide films).
- Section II differs from section III of the discharge curve in Figure 3b. In section II, an electrode with a smaller capacity is slightly coated with a hydroxide film, while in section III, the electrode is already significantly coated with a hydroxide film [57]. In section III, each fraction of the remaining small free area is already more significant than in section II, therefore, the voltage decreases much faster, and the rate of decrease increase [57].
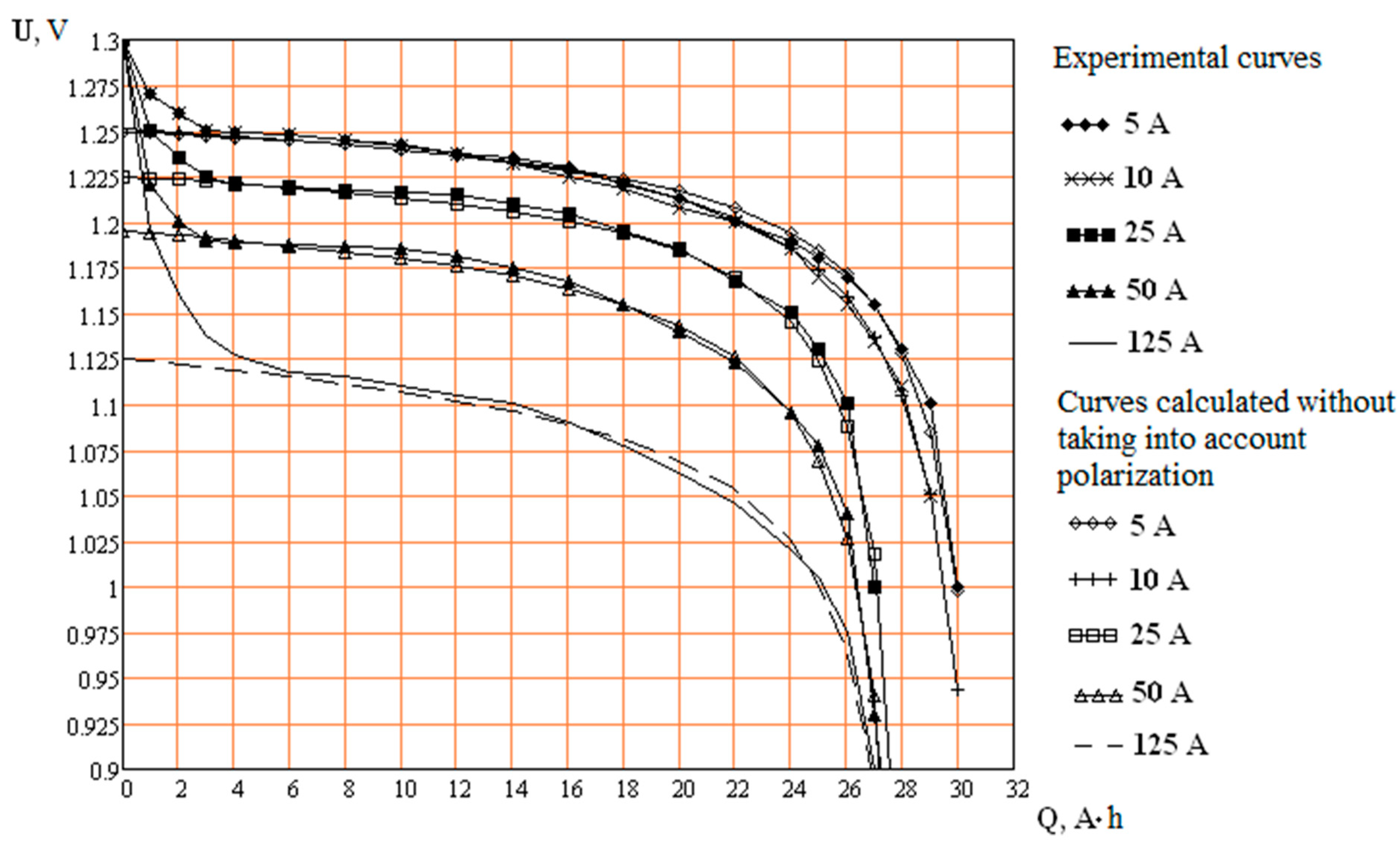
- The resistances of the free sections of the electrodes and the EMF of the electrode reactions are determined from the condition of coincidence of the calculated voltage curve with the experimental one for the considered discharge current and ambient temperature in sections II and III (Figure 3) corresponding to the steady-state concentrations of the electrolyte.
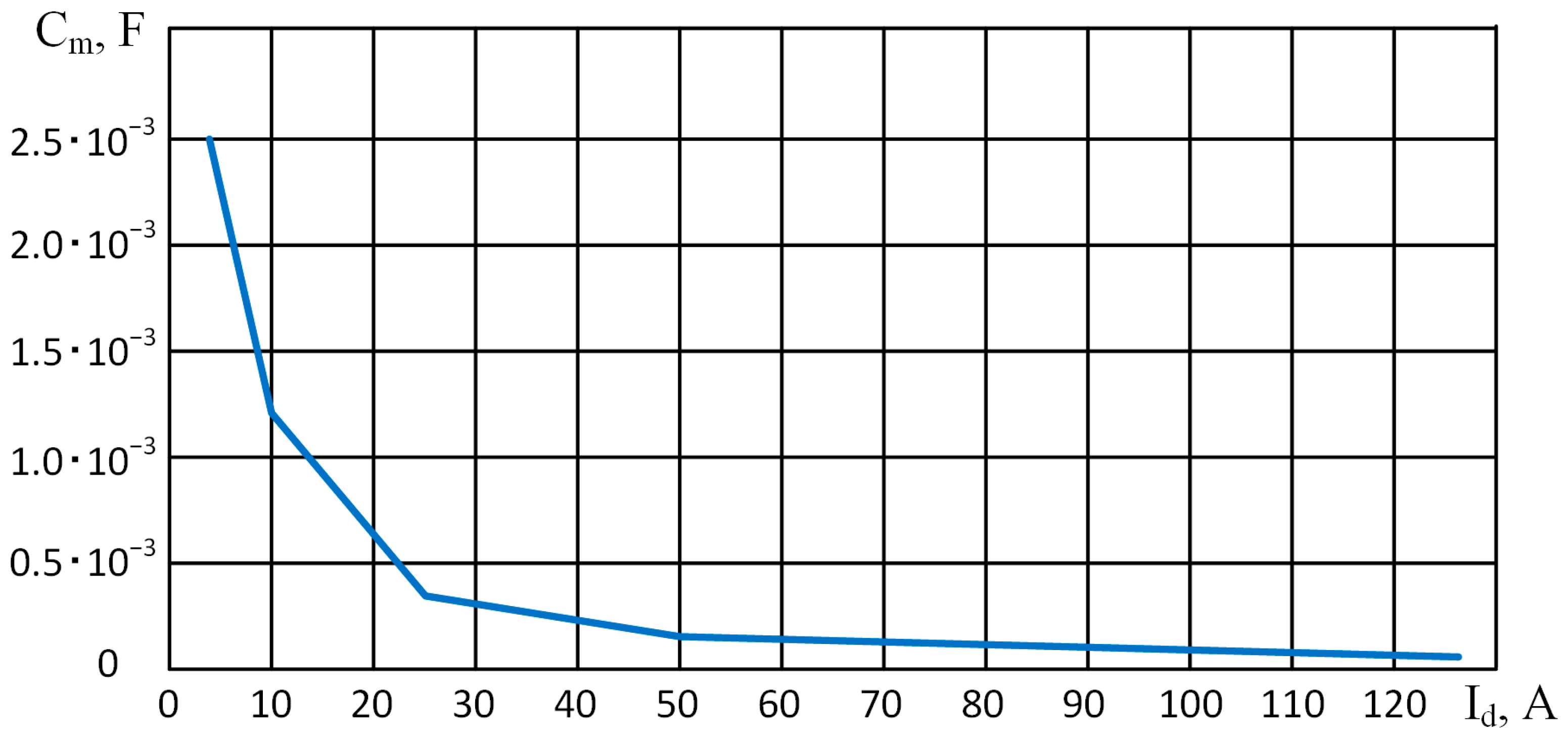
- The capacity of the membrane is determined from the condition of coincidence of the calculated voltage curve with the experimental one for the discharge current and ambient temperature in section I (Figure 3).
- The distribution of electrolyte concentrations over near-electrode regions, currents through the membrane during polarization, and the heat release power in a nickel–cadmium battery are determined for the specified discharge current of a nickel–cadmium battery and ambient temperature.
- The heat capacity and heat transfer coefficient of a nickel–cadmium battery are determined from the condition of coincidence of the calculated temperature dynamics with the experimental one.
- The following dependences are constructed:
- The membrane capacity on the current through the membrane and the temperature of the battery;
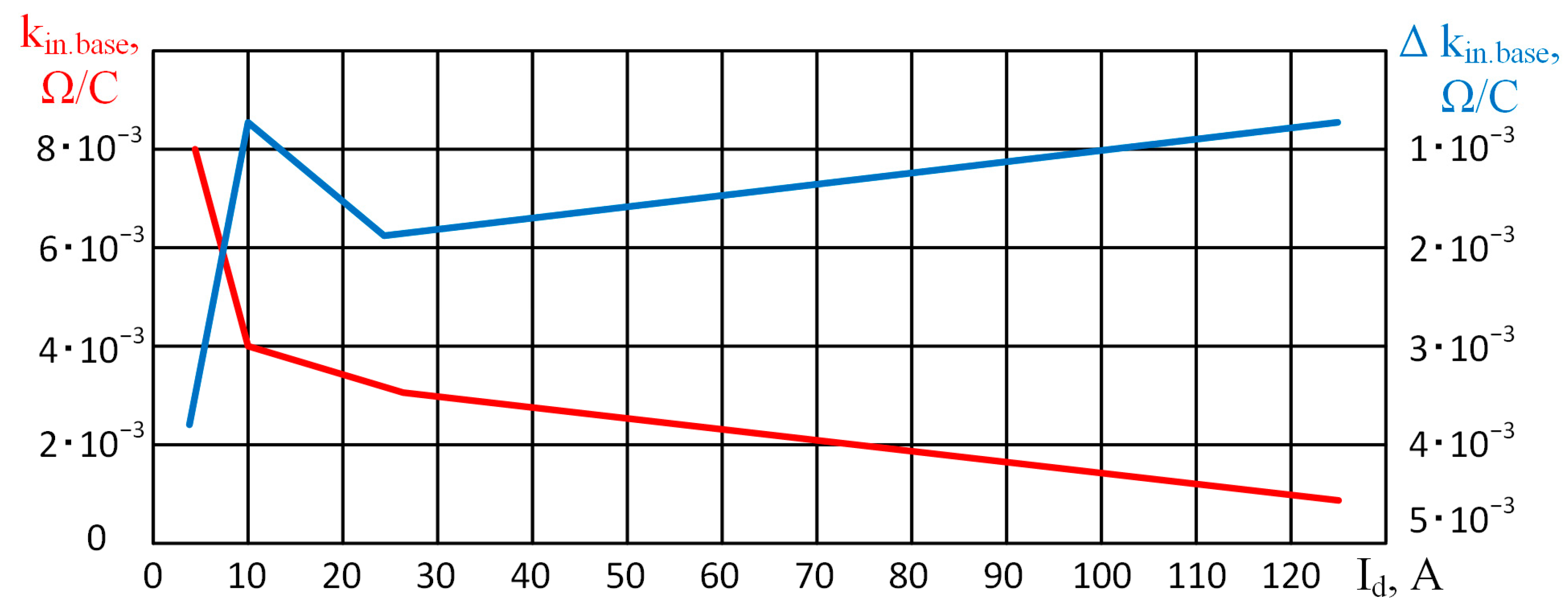
- The resistances of the active sections of the electrode on the charge or discharge currents;
- The EMF of the double layers on the redistribution of electrolyte concentrations.
- Analytical expressions of the properties of substances and processes in a nickel–cadmium battery are constructed by adding additional components in (50)–(53).
- The additional coefficients are determined from the discharge voltage and temperature dynamics for different discharge modes of a nickel–cadmium battery.
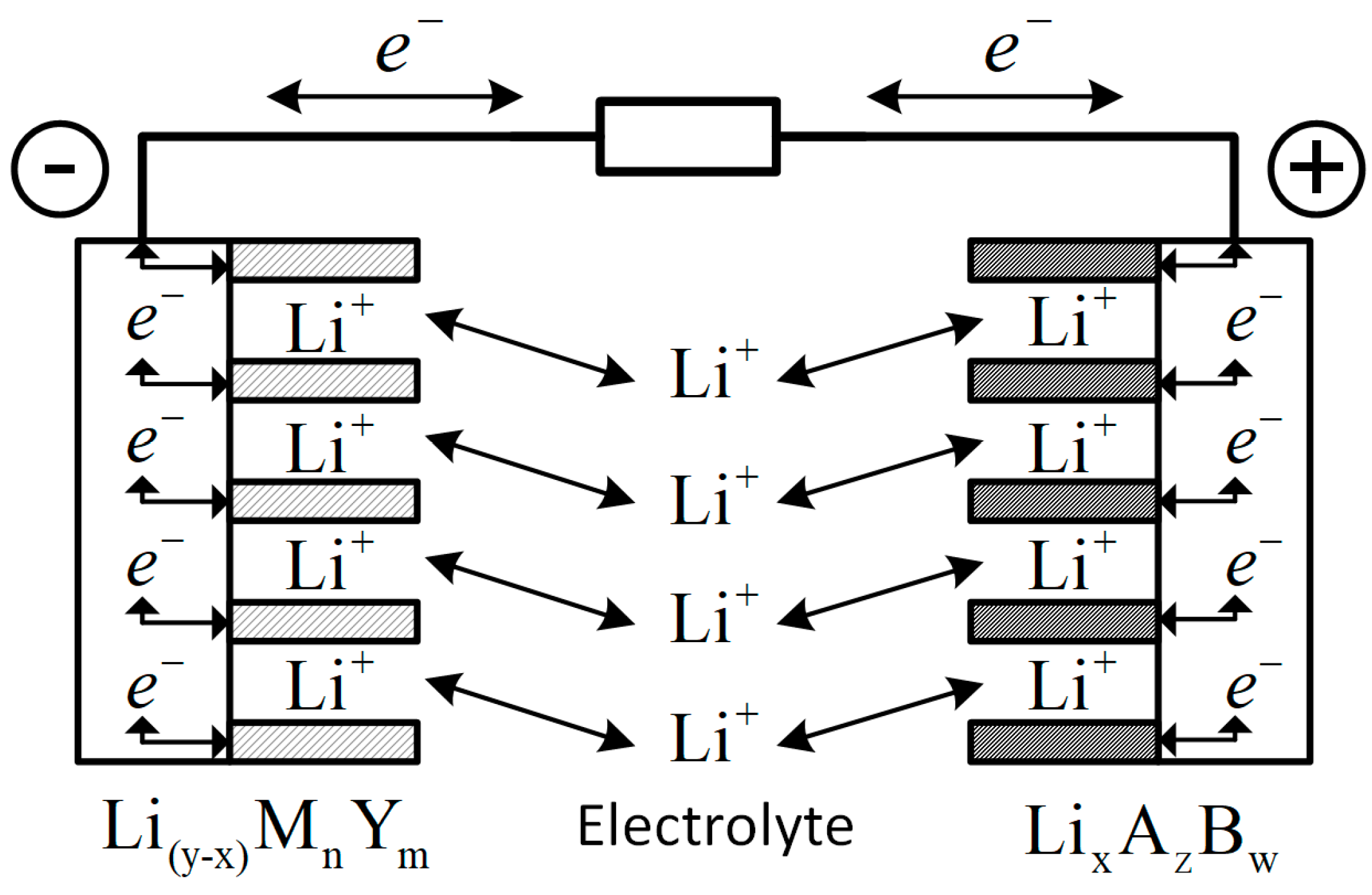
4.2. Lithium-Ion Accumulator Simulation
5. Discussion
- Formation and refinement of real-time digital twins of objects and systems;
- Synthesis of objects and systems governing laws;
- Diagnostics and forecasting of the technical condition of systems, as well as medical diagnostics;
- To form and optimize technological processes (in operation and maintenance, biochemistry and bioengineering, geoengineering and meteorology, aerospace technologies, etc.);
- Designing new facilities and systems.
Author Contributions
Funding
Conflicts of Interest
References
- Norenkov, I.P. Fundamentals of Computer-Aided Design, 4th ed.; Publishing House of Bauman Moscow State Technical University: Moscow, Russia, 2009; pp. 12–40. [Google Scholar]
- Barzilovich, E.Y. Models of Maintenance of Complex Systems; Higher School: Moscow, Russia, 1982; pp. 5–74. [Google Scholar]
- Kolodezhny, L.P.; Chernodarov, A.V. Reliability and Technical Diagnostics; VVA Publishing House named after N.E. Zhukovsky and Yu.A. Gagarin: Moscow, Russia, 2010; pp. 7–178. [Google Scholar]
- Bessekersky, V.A.; Popov, E.P. Theory of Automatic Control Systems, 3rd ed.; Nauka: Moscow, Russia, 1975; pp. 102–113. [Google Scholar]
- Akimov, V.A. Scientific foundations of the general security theory. Civ. Secur. Technol. 2017, 14, 4–9. [Google Scholar]
- Zhilina, I.Y. Geoengineering as a way to combat climate change: Benefit or harm? Social and humanitarian sciences: Domestic and foreign literature. Econ. Abstr. J. 2020, 106–115. [Google Scholar]
- Khromov, S.P.; Petrosyants, M.A. Meteorology and Climatology, 7th ed.; Moscow University Press: Moscow, Russia, 2006; pp. 19–25. [Google Scholar]
- Gaydes, M.A. General Theory of Systems (Systems and System Analysis), 2nd ed.; Globus-Press: Moscow, Russia, 2005; pp. 24–168. [Google Scholar]
- Antonov, A.V. System Analysis; Publishing House “Higher School”: Moscow, Russia, 2004; pp. 37–124. [Google Scholar]
- Eykhoff, P. Systems Identification: Parametrs and State Estimation; University of Technology: Eindhoven, The Netherlands, 1975; pp. 17–49. [Google Scholar]
- Tsypkin, Y.Z. Information Theory of Identification; Science, Physical Education: Moscow, Russia, 1995; pp. 13–57. [Google Scholar]
- Vyugin, V.V. Mathematical Foundations of Machine Learning and Forecasting; ICNMO Publishing House: Moscow, Russia, 2014; pp. 16–66. [Google Scholar]
- Flach, P. Machine Learning. The Art and Science of Algorithms that Make Sense of Data; Cambridge University Press: Cambridge, UK, 2015; pp. 14–61. [Google Scholar]
- Haykin, S. Neural Networks. A Comprehensive Foundation, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2006; pp. 42–161. [Google Scholar]
- Strizhov, V.V. Methods of Inductive Generation of Regression Models; Computing Center of the Russian Academy of Sciences: Moscow, Russia, 2008; pp. 24–56. [Google Scholar]
- Goemans, M.X.; Williamson, D.P. A general approximation technique for constrained forest problems. SIAM J. Comput. 1995, 24, 296–317. [Google Scholar] [CrossRef] [Green Version]
- Hegde, C.; Indyk, P.; Schmidt, L. A nearly-linear time framework for graph-structured sparsity. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 928–937. [Google Scholar]
- Diveev, A.I. Properties of the superposition of functions for numerical methods of symbolic regression. Cloud Sci. 2016, 3, 290–301. [Google Scholar]
- Dang Thi Fook; Diveev, A.I.; Sofronova, E.A. Solving problems of identification of mathematical models of objects and processes by the method of symbolic regression. Cloud Sci. 2018, 5, 147–162. [Google Scholar]
- Diveev, A.I.; Lomakova, E.M. The method of binary genetic programming for the search for a mathematical expression. In Bulletin of the Peoples’ Friendship University of Russia; Engineering Research: Moscow, Russia, 2017; Volume 18, pp. 125–134. [Google Scholar] [CrossRef] [Green Version]
- Dzyadyk, V.K. Introduction to the Theory of Uniform Approximation of Functions by Polynomials; Nauka Publishing House, Main Editorial Office of Physical and Mathematical Literature: Moscow, Russia, 1977; pp. 9–202. [Google Scholar]
- Borisevich, A.V. Modeling of Lithium-Ion Batteries for Battery Management Systems: An Overview of the Current State. Electron. Sci. Pract. J. Mod. Eng. Technol. 2014. Available online: http://technology.snauka.ru/2014/05/3542 (accessed on 23 October 2022).
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Etkin, V.A. Energodynamics (Synthesis of Energy Transfer and Conversion Theories); SPb.: Nauka, Russia, 2008; 409p, ISBN 978-5-02-025318-6. [Google Scholar]
- Etkin, V.A. Towards a unified thermodynamic theory of real transfer processes. Inf. Process. Syst. Technol. 2021, 9–18. [Google Scholar]
- Etkin, V.A. Ergodynamic theory of the evolution of biological systems. Inf. Process. Syst. Technol. 2022, 12–24. [Google Scholar] [CrossRef]
- On the Fourth Principle of Thermodynamics. Available online: http://samlib.ru/e/etkin_w_a/ochetvernomnachaletermodynamiki.shtml (accessed on 24 October 2022).
- Zarubin, V.S.; Kuvyrkin, G.N. Mathematical Models of Mechanics and Electrodynamics of a Continuous Medium; Publishing House of Bauman Moscow State Technical University: Moscow, Russia, 2008; pp. 17–196. [Google Scholar]
- Zarubin, V.S. Mathematical Modeling in Engineering, 2nd ed.; Publishing House of Bauman Moscow State Technical University: Moscow, Russia, 2003; pp. 87–286. [Google Scholar]
- Belenky, I.M. Introduction to Analytical Mechanics; Higher School: Moscow, Russia, 1964; pp. 101–165. [Google Scholar]
- Gorshkov, A.G.; Rabinsky, L.N.; Tarlakovsky, D.V. Fundamentals of Tensor Analysis and Continuous Medium Mechanics; Publishing House Nauka: Moscow, Russia, 2000; pp. 86–213. [Google Scholar]
- Bessonov, L.A. Theoretical Foundations of Electrical Engineering; Higher School: Moscow, Russia, 1996; pp. 2–308, 404–554. [Google Scholar]
- Demirel, Y.; Gerbaud, V. Nonequilibrium Thermodynamics. Transport and Rate Processes in Physical, Chemical and Biological Systems, 3rd ed.; Elsevier: Amsterdam, the Netherlands, 2014; pp. 75–563. [Google Scholar]
- Krutov, V.I.; Isaev, S.I.; Kozhinov, I.A. Technical Thermodynamics, 3rd ed.; Higher School: Moscow, Russia, 1991; pp. 16–84, 206–277. [Google Scholar]
- Groot, S.R. Thermodynamics of Irreversible Processes; State Publishing House of Technical and Theoretical Literature: Moscow, Russia, 1956; pp. 19–233. [Google Scholar]
- Starostin, I.E.; Bykov, V.I. Kinetic Theorem of Modern Non-Equilibrim Thermodynamics; Open Science Publishing: Raley, NC, USA, 2017; pp. 132–206. [Google Scholar]
- Starostin, I.E.; Stepankin, A.G. Software Implementation of Modern Nonequilibrium Thermodynamics Methods. The Simulation System of Physico-Chemical Processes SimulationNonEqProcSS v.0.1.0; Lambert Academic Publishing: Beau Bassin, Mauritius, 2019; pp. 9–46. [Google Scholar]
- Starostin, I.E.; Khalyutin, S.P.; Bykov, V.I. Setting the State functions for the properties of substances and processes in a differential form. Complex Syst. 2022, 4–16. [Google Scholar]
- Khalyutin, S.P.; Starostin, I.E.; Davidov, A.O.; Kharkov, V.P.; Zhmurov, B.V. Digital twins in the theory and practice of aviation electric power industry. Electricity 2022, 4–13. [Google Scholar] [CrossRef]
- Starostin, I.E. Setting correct analytical expressions for transformed potentially streaming models. In Proceedings of the XIX International Scientific and Practical Conference “Innovative, Information and Communication Technologies”, Moscow, Russia, 21–25 November 2022; pp. 263–269. [Google Scholar]
- Gurov, A.A.; Badaev, F.Z.; Ovcharenko, L.P.; Shapoval, V.N. Chemistry, 3rd ed.; Publishing House of Bauman Moscow State Technical University: Moscow, Russia, 2007; pp. 175–592. [Google Scholar]
- Cybenko, G.V. Approximation by Superpositions of a Sigmoidal function. Math. Control. Signals Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Gorban, A.N. Generalized approximation theorem and computational capabilities of artificial neural networks. Sib. Gournal Numer. Math. 1998, 1, 11–24. [Google Scholar]
- Kalitkin, N.N. Approximation of functions. In Numerical Methods; Nauka: Moscow, Russia, 1978; pp. 27–69. [Google Scholar]
- Chernorutsky, I.G. Optimization Methods; St. Petersburg State Polytechnic University Publishing House: St. Petersburg, Russia, 2012; pp. 5–46. [Google Scholar]
- Kalitkin, N.N. Numerical Methods; Nauka: Moscow, Russia, 1978; pp. 238–257. [Google Scholar]
- Arnold, V.I. Ordinary Differential Equations, 3rd ed.; ICNMO: Moscow, Russia, 2012; pp. 13–158. [Google Scholar]
- Prigozhin, I.; Kondepudi, D. Modern Thermodynamics: From Heat Engines to Dissipative Structures; Mir: Moscow, Russia, 2002; pp. 319–425. [Google Scholar]
- Bykov, V.I.; Starostin, I.E.; Khalyutin, S.P. Analysis of the formation of dissipative structures in complex concentrated systems based on the potentially streaming method. Cybernetic approach. Complex Syst. 2012, 72–89. [Google Scholar]
- Lantsov, V.N. Methods of Lowering the Order of Models of Complex Systems; Publishing House of Vladimir State University Named after A.G. and N.G. Stoletovs: Vladimir, Russia, 2017; pp. 16–75. [Google Scholar]
- Starostin, I.E. An algorithm for numerical integration of potential-flow equations in concentrated parameters with control of the correctness of the approximate solution. Com. Res. Model. 2014, 6, 479–493. [Google Scholar] [CrossRef] [Green Version]
- Starostin, I.E.; Bykov, V.I.; Stepankin, A.G. Numerical modeling of physical and physico-chemical processes taking into account fluctuations and checking the correctness of the approximate solution. Proc. Int. Symp. Reliab. Qual. 2018, 1, 79–83. [Google Scholar]
- Starostin, I.E.; Bykov, V.I. Estimation of the error tolerance of measuring the properties of substances and processes for modeling of nonequilibrium processes by the potential-flow method. Proc. Int. Symp. Reliab. Qual. 2015, 2, 203–206. [Google Scholar]
- Starostin, I.E.; Khalyutin, S.P.; Altukhov, A.V.; Davidov, A.O. Parallelization Applied to the Synthesis Methodology and Operation of Complex Systems Based on the Analysis and Modelling of their Physical and Chemical Processes. In Proceedings of the 2020 1st International Conference Problems of Informatics, Electronics, and Radio Engineering (PIERE), Novosibirsk, Russia, 10–11 December 2020; pp. 287–294. [Google Scholar]
- Vasiliev, S.N.; Yusupov, R.M. Simulation modeling. In Proceedings of the Theory and Practice: The Seventh All-Russian Sci-entific and Practical Conference, Moscow, Russia, 21–23 October 2015; V.A. Trapeznikov Institute of Management Problems of the Russian Academy of Sciences: Moscow, Russia, 2015; Volume 2, pp. 280–284. [Google Scholar]
- Taganova, A.A.; Bubnov, Y.I.; Orlov, S.B. Hermetic Chemical Current Sources: Cells and Accumulators. Equipment for Testing and Operation: Handbook; Chemical Publishing House: St-Petersburg, Russia, 2005; pp. 67–86. [Google Scholar]
- Khalyutin, S.P.; Starostin, I.E. Determination of the parameters of the substitution scheme of a potential-flow model of a nickel-cadmium battery by the method of hydroxide films. Reliab. Qual. Pr. International. Simp. (Penza, 2011) 2011, 318–324. [Google Scholar]
- Starostin, I.E.; Khalyutin, S.P. Modeling of physico-chemical processes in nickel-cadmium batteries by the potential-flow method. Innov. Based Inf. Commun. Technol. 2011, 517–520. [Google Scholar]
- Starostin, I.E. Determination of parameters of physico-chemical processes of nickel-cadmium batteries by the method of hydroxide films. Innov. Based Inf. Commun. Technol. 2011, 520–523. [Google Scholar]
- Kedrinsky, I.A.; Yakovlev, V.G. Lithium-ion Batteries; Platinum: Krasnoyarsk, Russia, 2002; pp. 19–22. [Google Scholar]
- Khalyutin, S.P.; Zhmurov, B.V.; Starostin, I.E. Mathematical modeling of electrochemical processes in lithium-ion batteries by the potential-flow method. Civ. Aviat. High Technol. 2014, 65–73. [Google Scholar]
- Starostin, I.E.; Khalyutin, S.P.; Davidov, A.O.; Punt, E.A.; Pavlova, V.I. Obtaining a Model for the Voltage and Temperature of the US18650VTC6 Series Lithium-ion Battery in Constant Current Discharge Mode from the Analysis of Physical and Chemical Processes in the Accumulator. In Proceedings of the 2021 XVIII Technical Scientific Conference on Aviation Dedicated to the Memory of N.E. Zhukovsky (TSCZh), Moscow, Russian, 29–30 October 2021; pp. 109–117. [Google Scholar] [CrossRef]
- Smith, K.; Wang, C.Y. Solid-state diffusion limitations on pulse operation of a lithium-ion cell for hybrid electric vehicles. J. Power Sources 2006, 161, 628–639. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalyutin, S.; Starostin, I.; Agafonkina, I. Generalized Method of Mathematical Prototyping of Energy Processes for Digital Twins Development. Energies 2023, 16, 1933. https://doi.org/10.3390/en16041933
Khalyutin S, Starostin I, Agafonkina I. Generalized Method of Mathematical Prototyping of Energy Processes for Digital Twins Development. Energies. 2023; 16(4):1933. https://doi.org/10.3390/en16041933
Chicago/Turabian StyleKhalyutin, Sergey, Igor Starostin, and Irina Agafonkina. 2023. "Generalized Method of Mathematical Prototyping of Energy Processes for Digital Twins Development" Energies 16, no. 4: 1933. https://doi.org/10.3390/en16041933