
Ocean Wave Energy Control Using Aquila Optimization Technique

 , , ,
, , ,  ,
,  and
and
Abstract
:1. Introduction
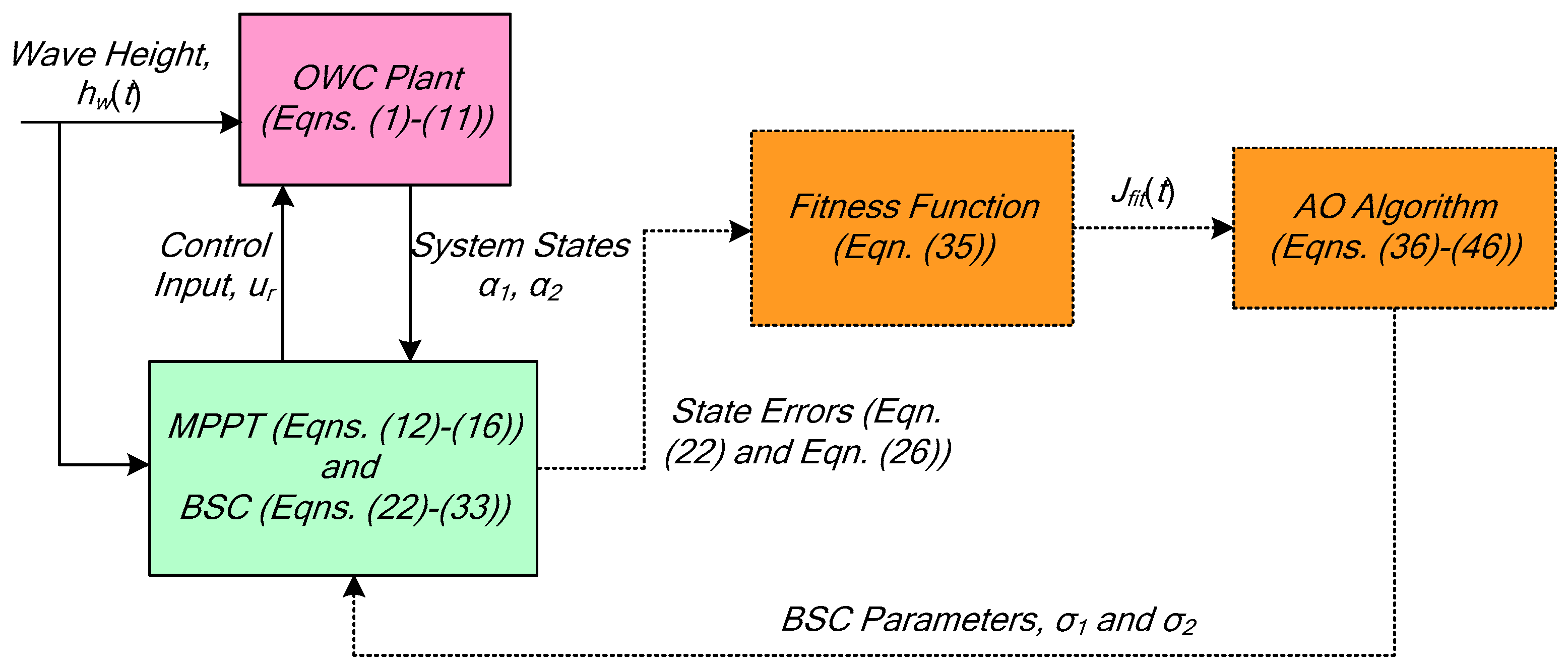
- This study proposes the optimization approach for tuning the BSC control parameters to achieve the optimum control of an OWC plant. In recent past studies, there was manual tuning of the BSC control parameters which might lead to the poor performance of an OWC plant.
- An integral square error (ISE)-type fitness function has been defined. The AO technique has been applied to minimize the ISE and to obtain the optimized BSC control parameters. This approach has not been applied yet on an OWC plant.
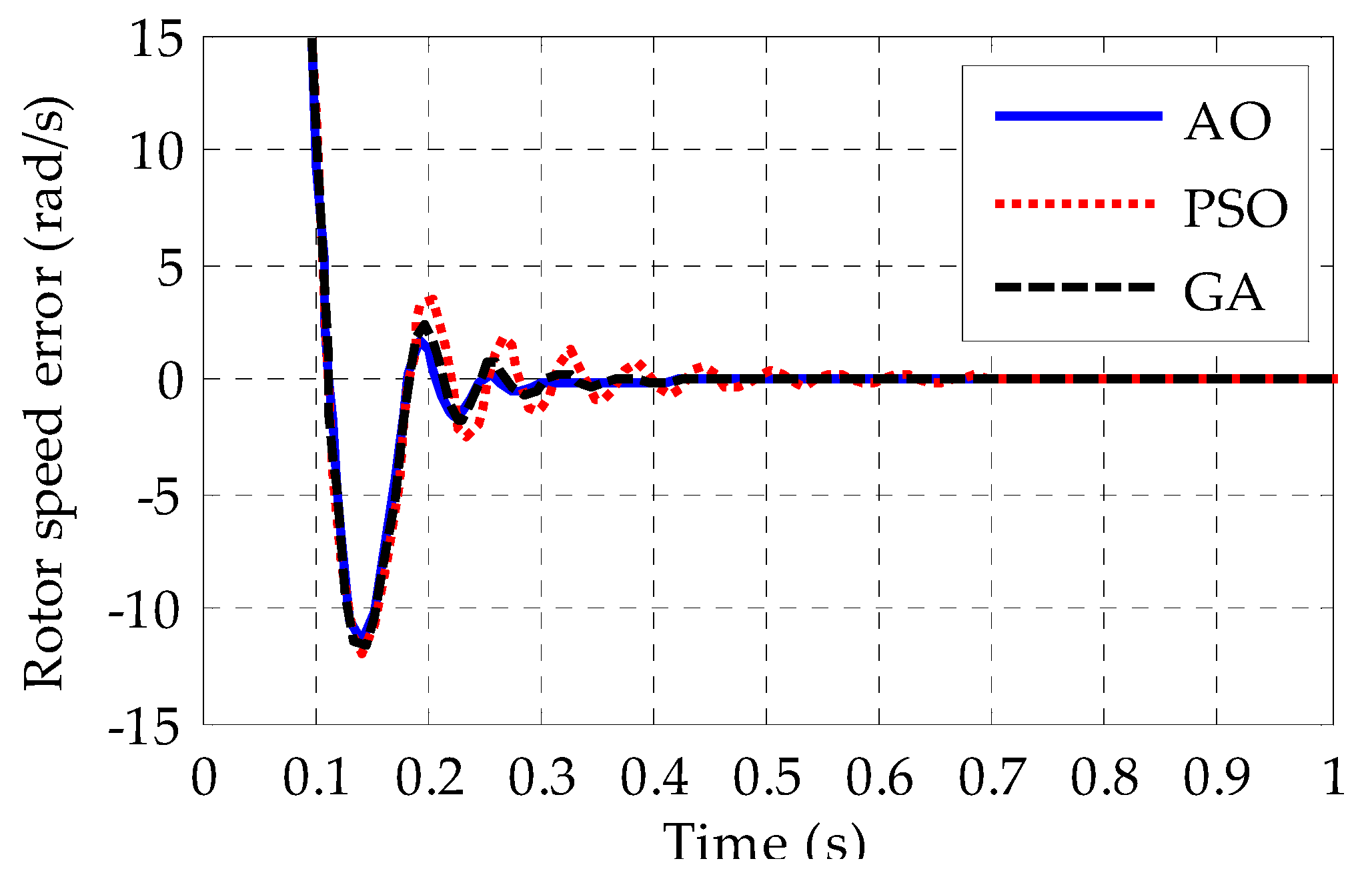
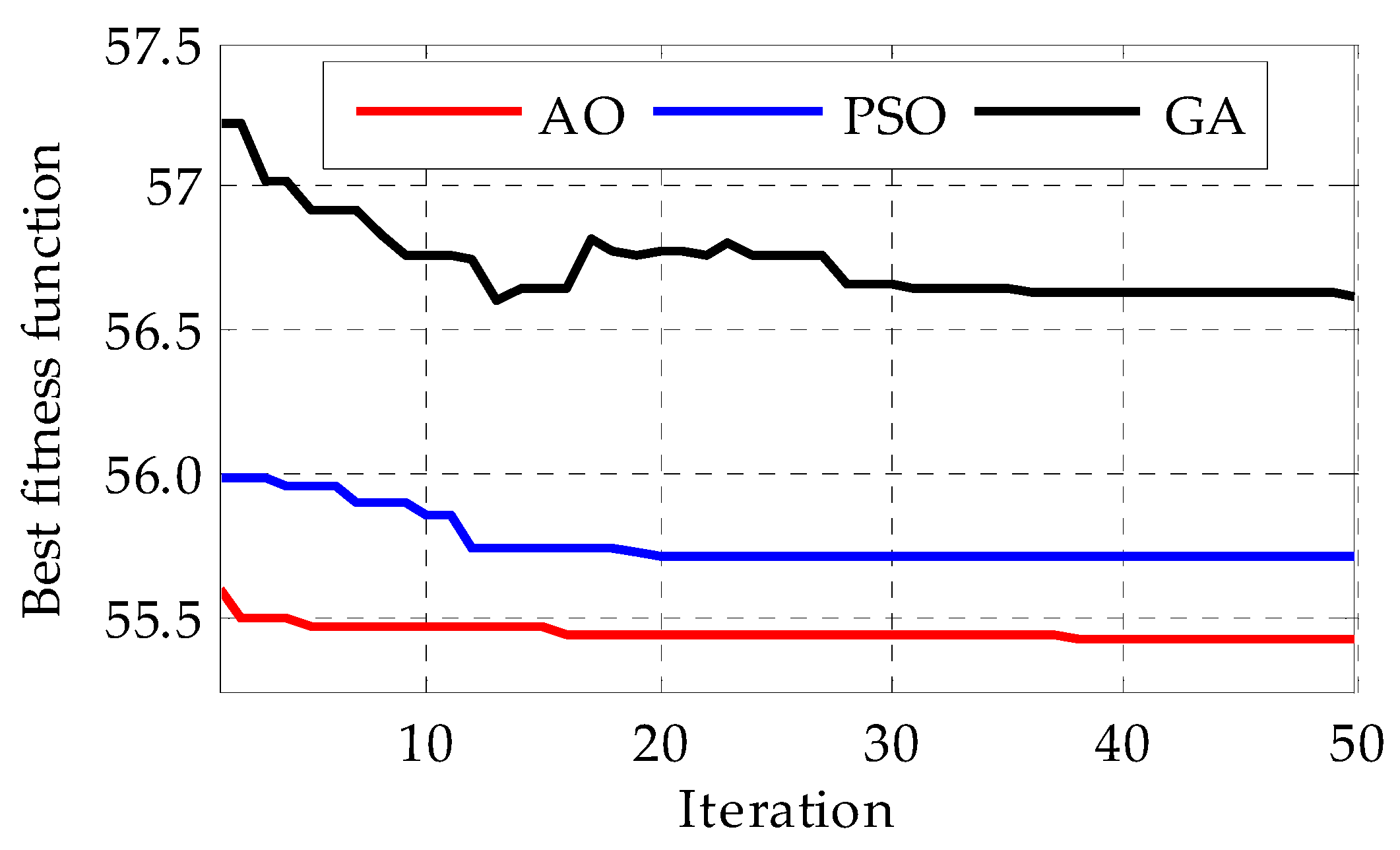
- Additionally, the particle swarm optimization (PSO) and genetic algorithm (GA) technique are also applied which are widely used optimizers. The details about PSO and GA can be found in [41,42,43,44]. The AO has been compared with the PSO and GA techniques in terms of rotor speed error and fitness function.
2. Description of OWC and Control Problem Statement
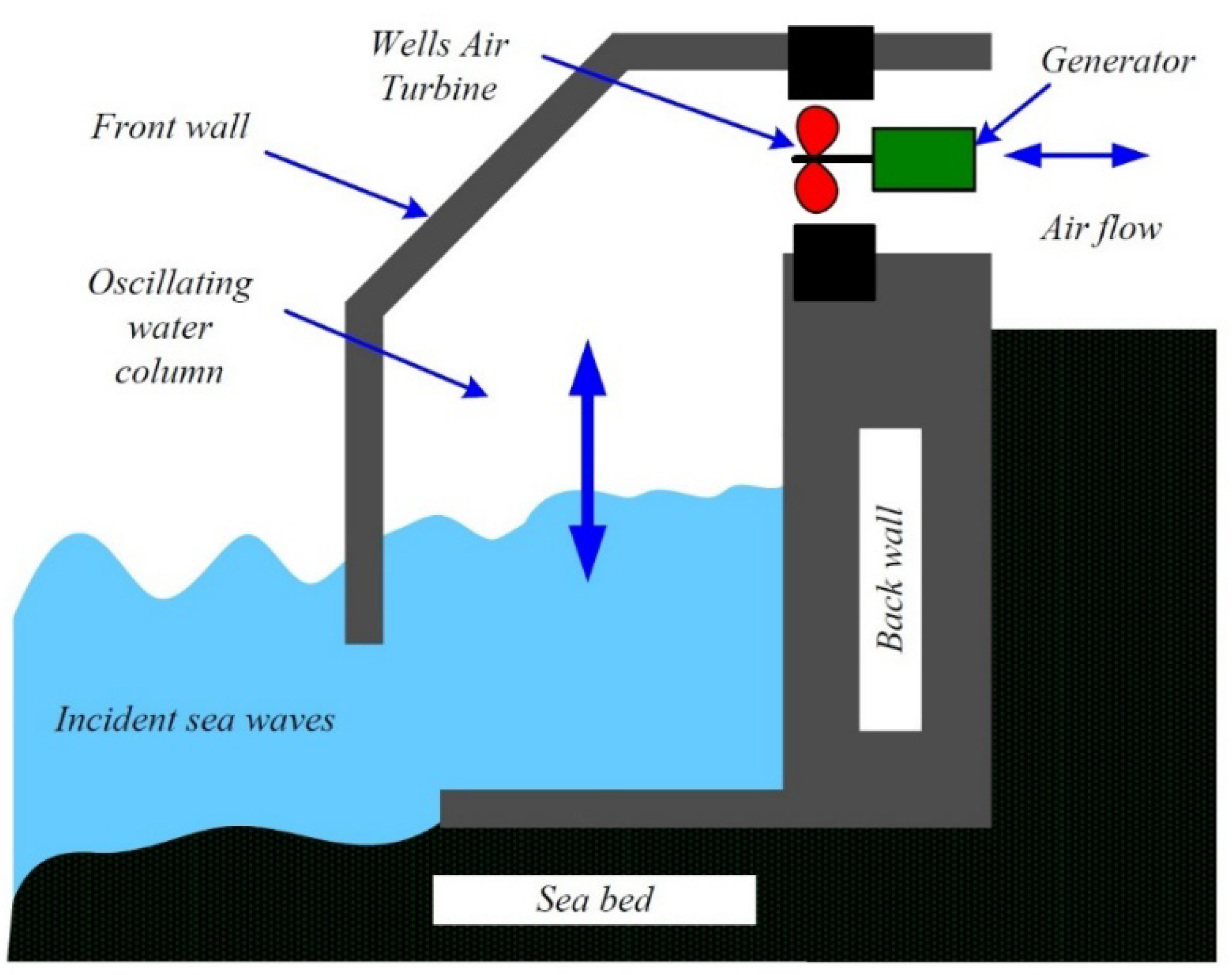
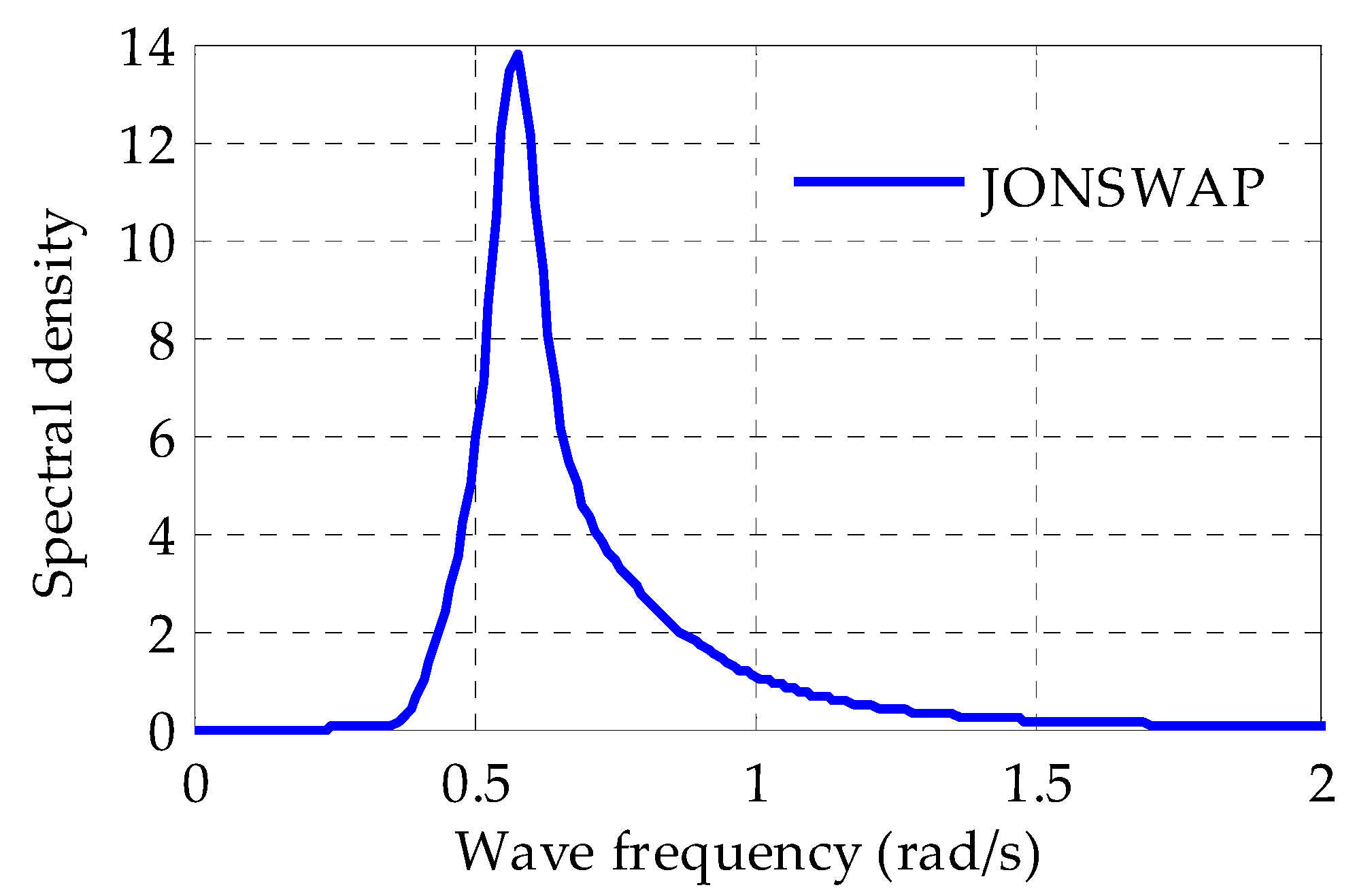
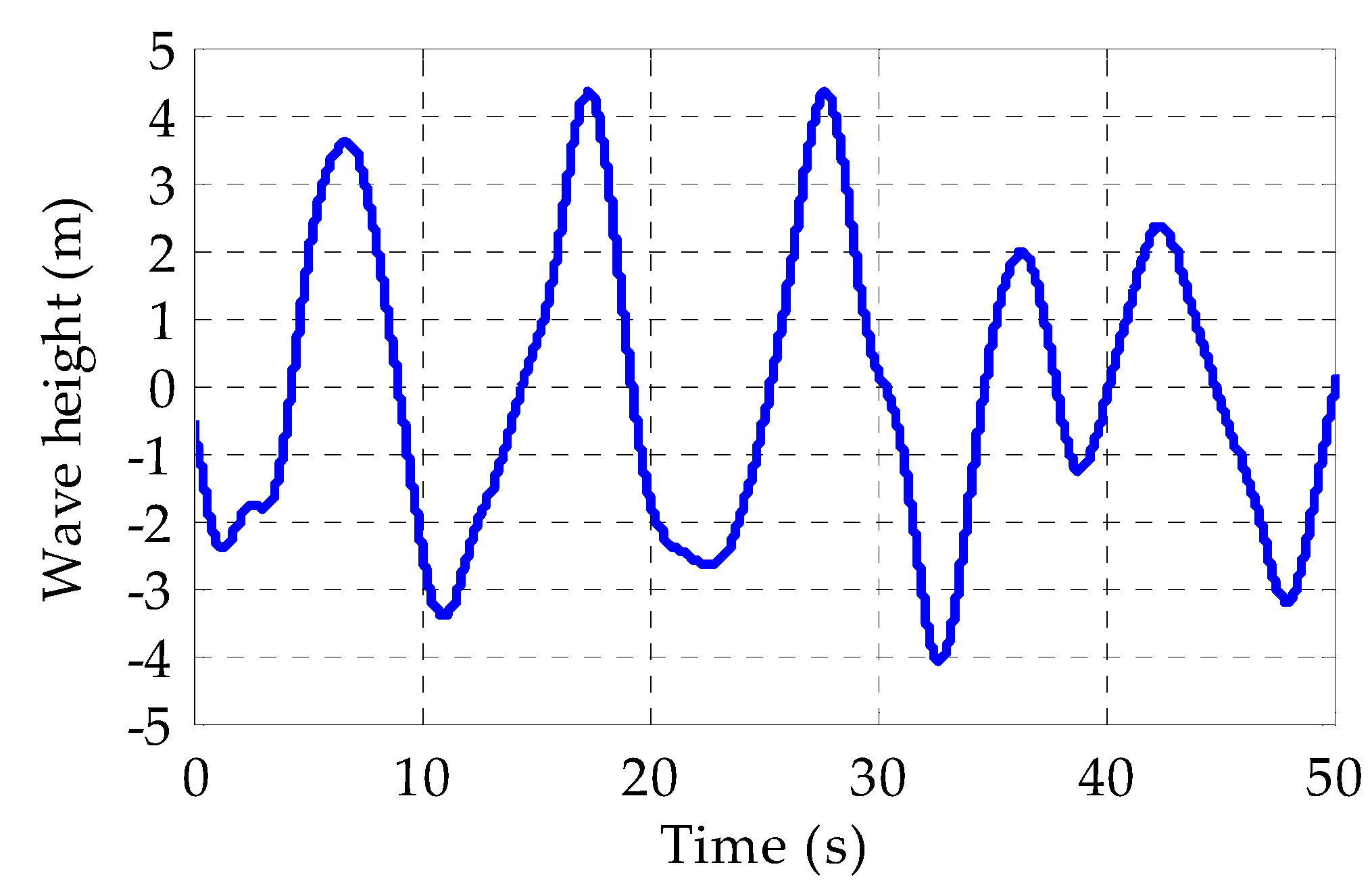
2.1. Wave Modeling and Chamber Dynamics
2.2. Wells Turbine Dynamics
2.3. DFIG Dynamics
3. Design of BSC Scheme and MPPT Algorithm
3.1. Design of MPPT Scheme
3.2. Design of BSC Scheme
3.3. The Optimization Problem Statement
4. The AO Algorithm
5. Simulation Results
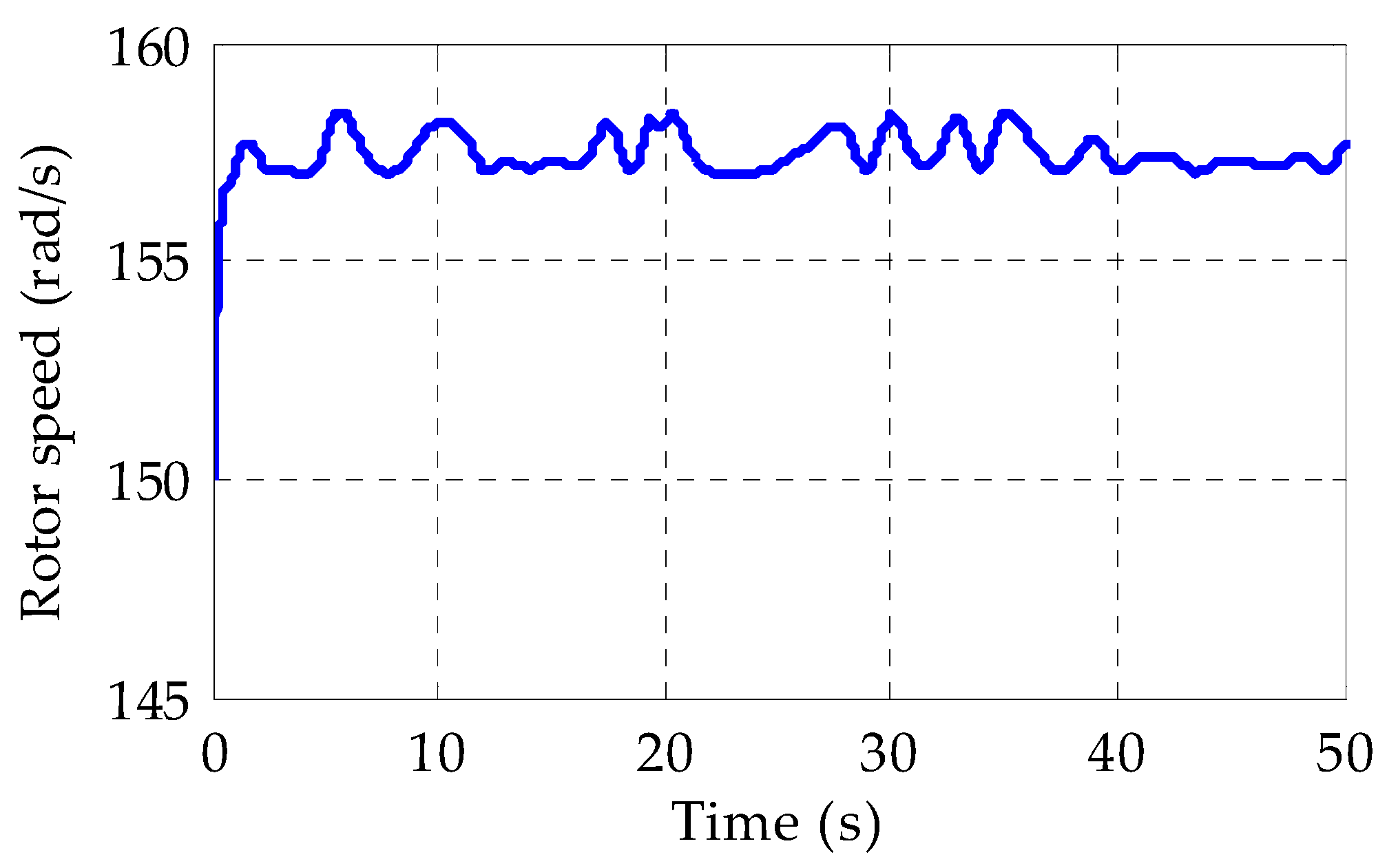
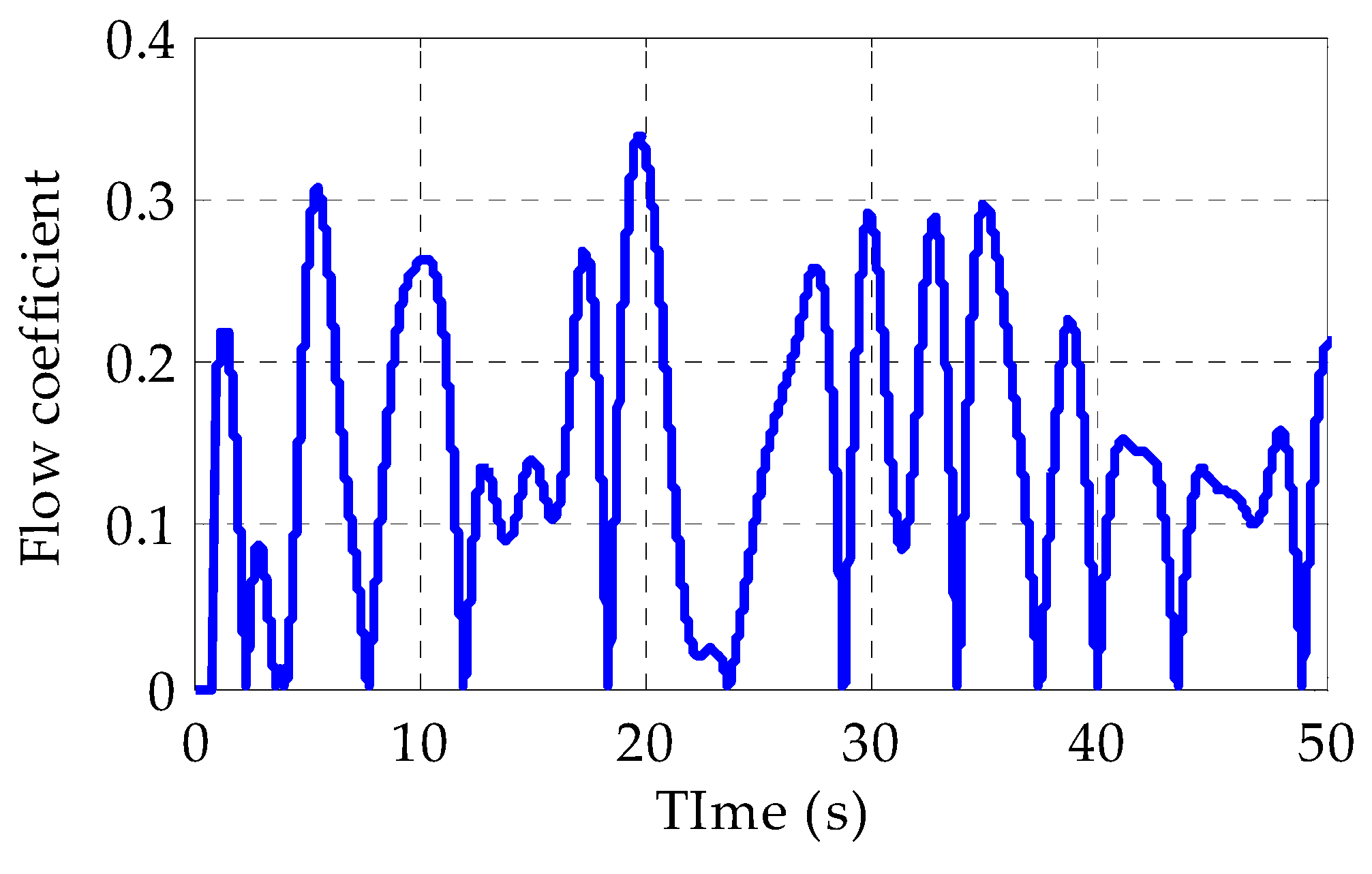
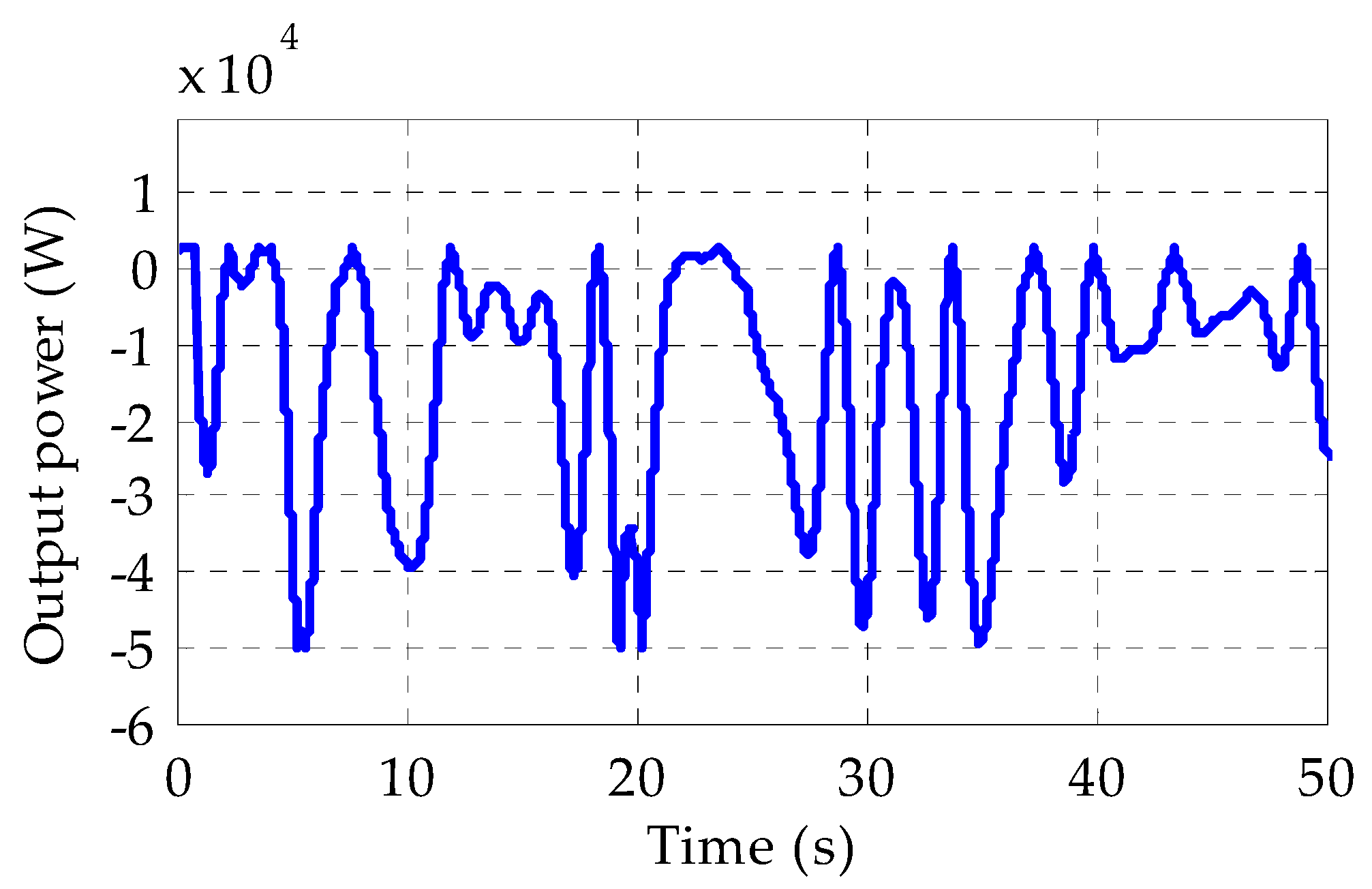
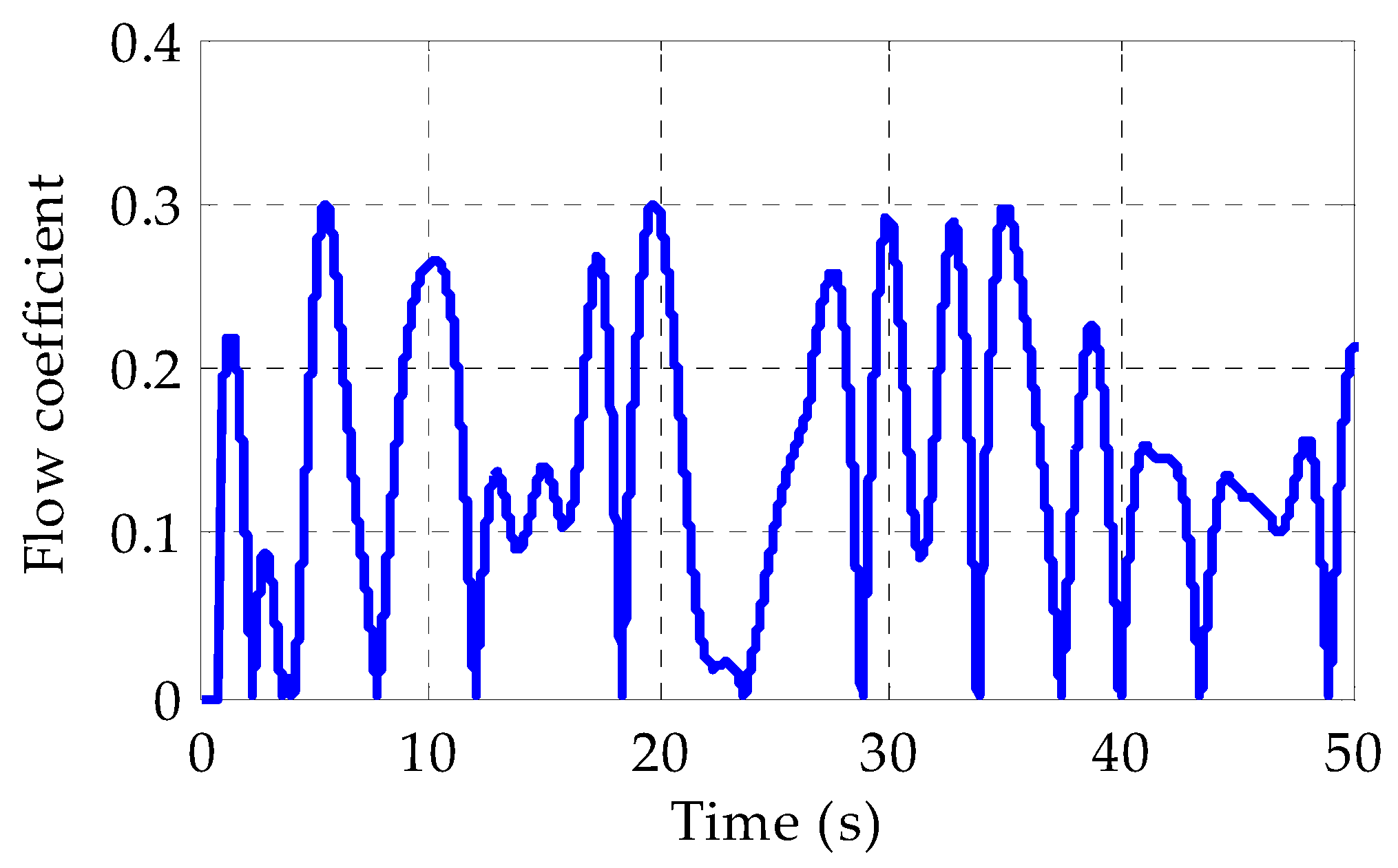
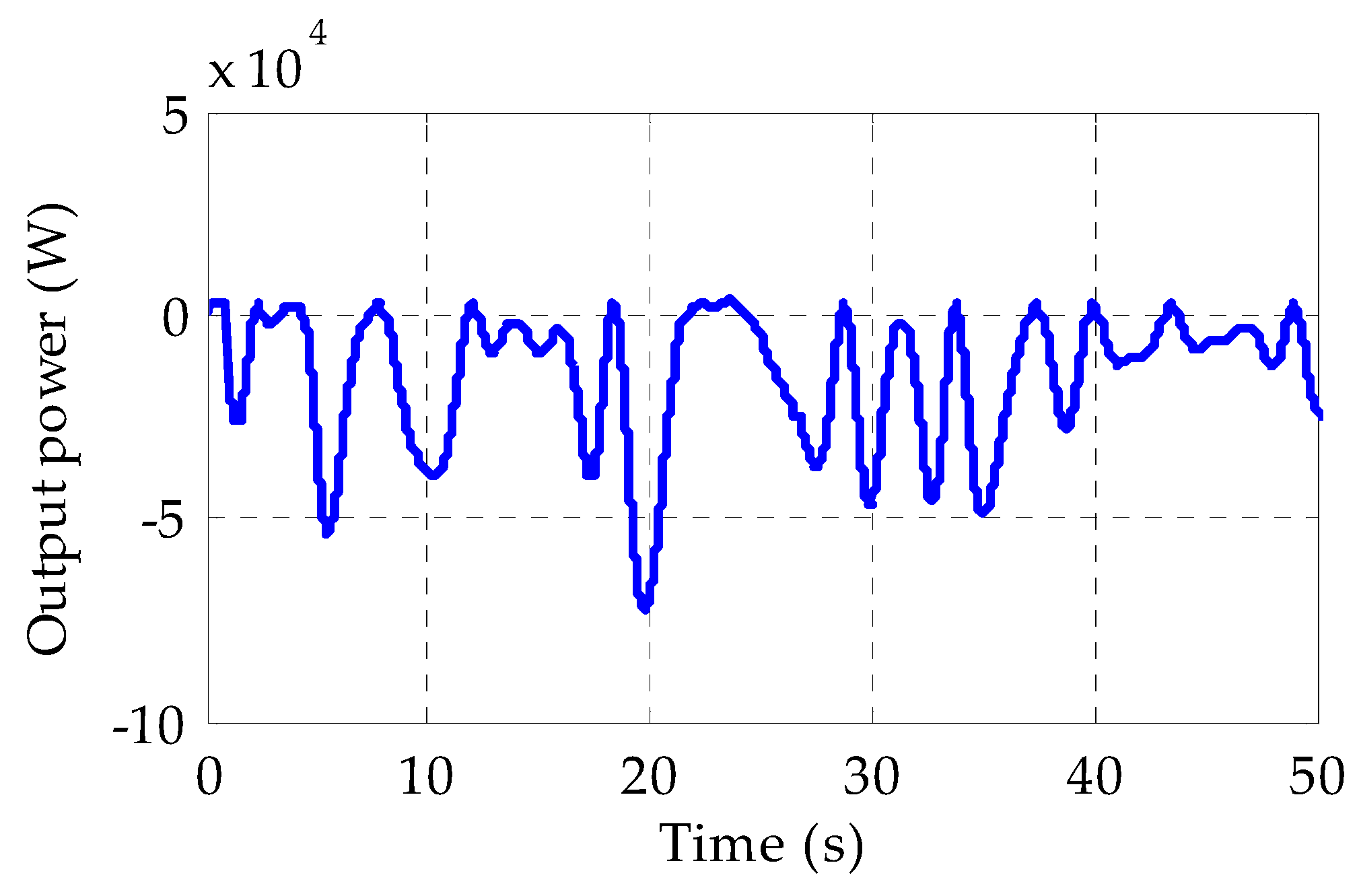
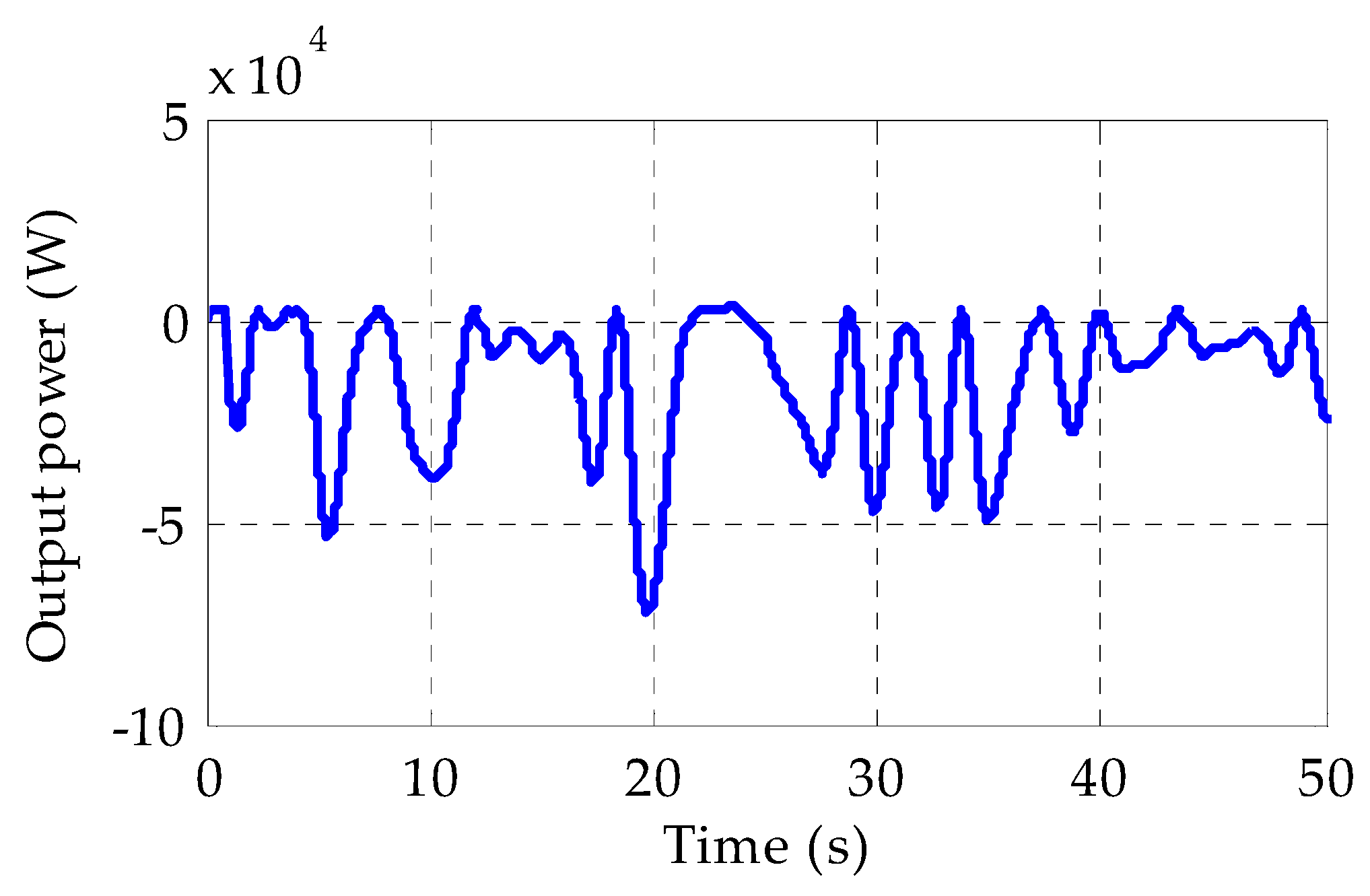
5.1. Performance of the Uncontrolled OWC Plant
5.2. Performance of the PSO-BSC controlled OWC Plant
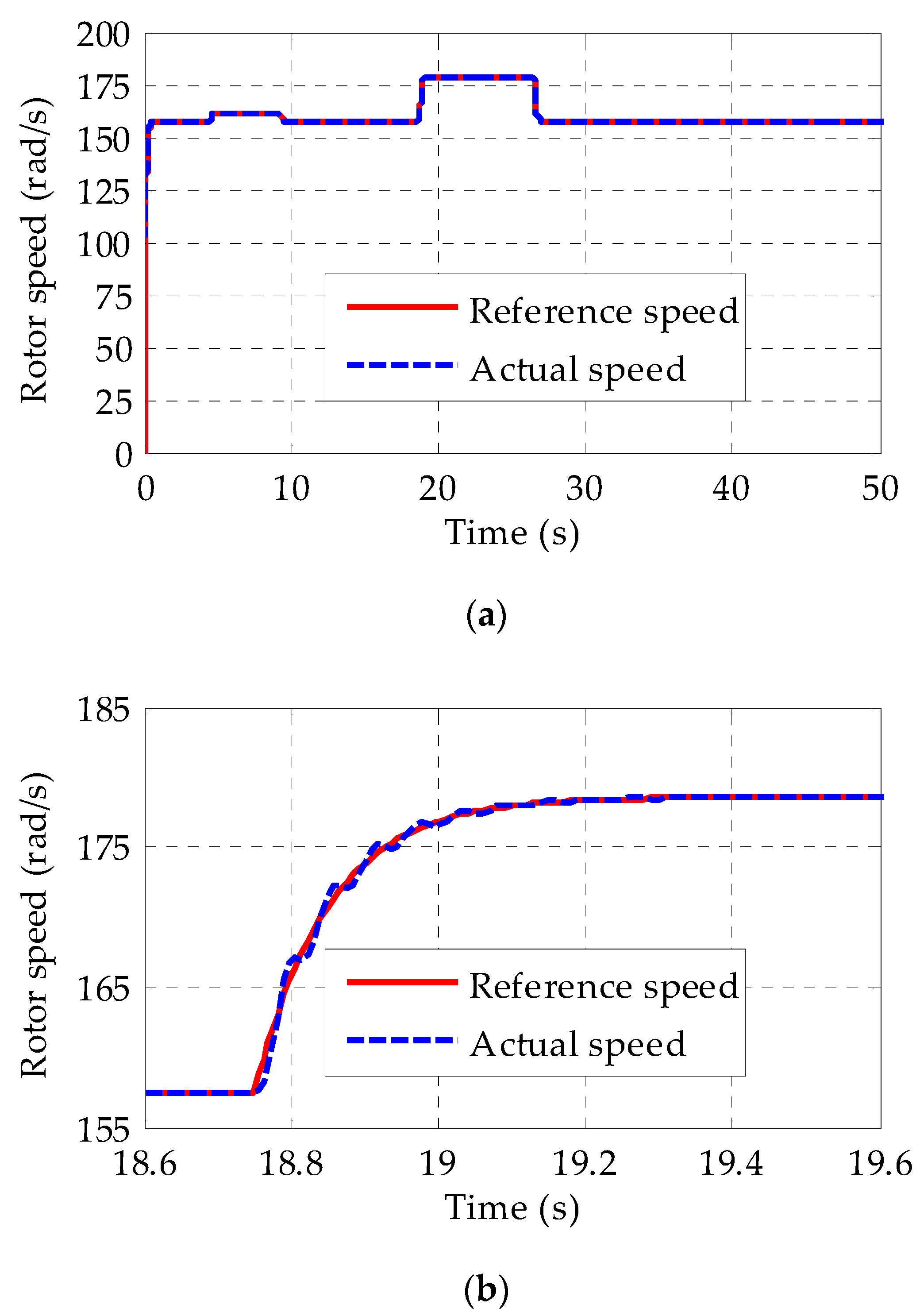
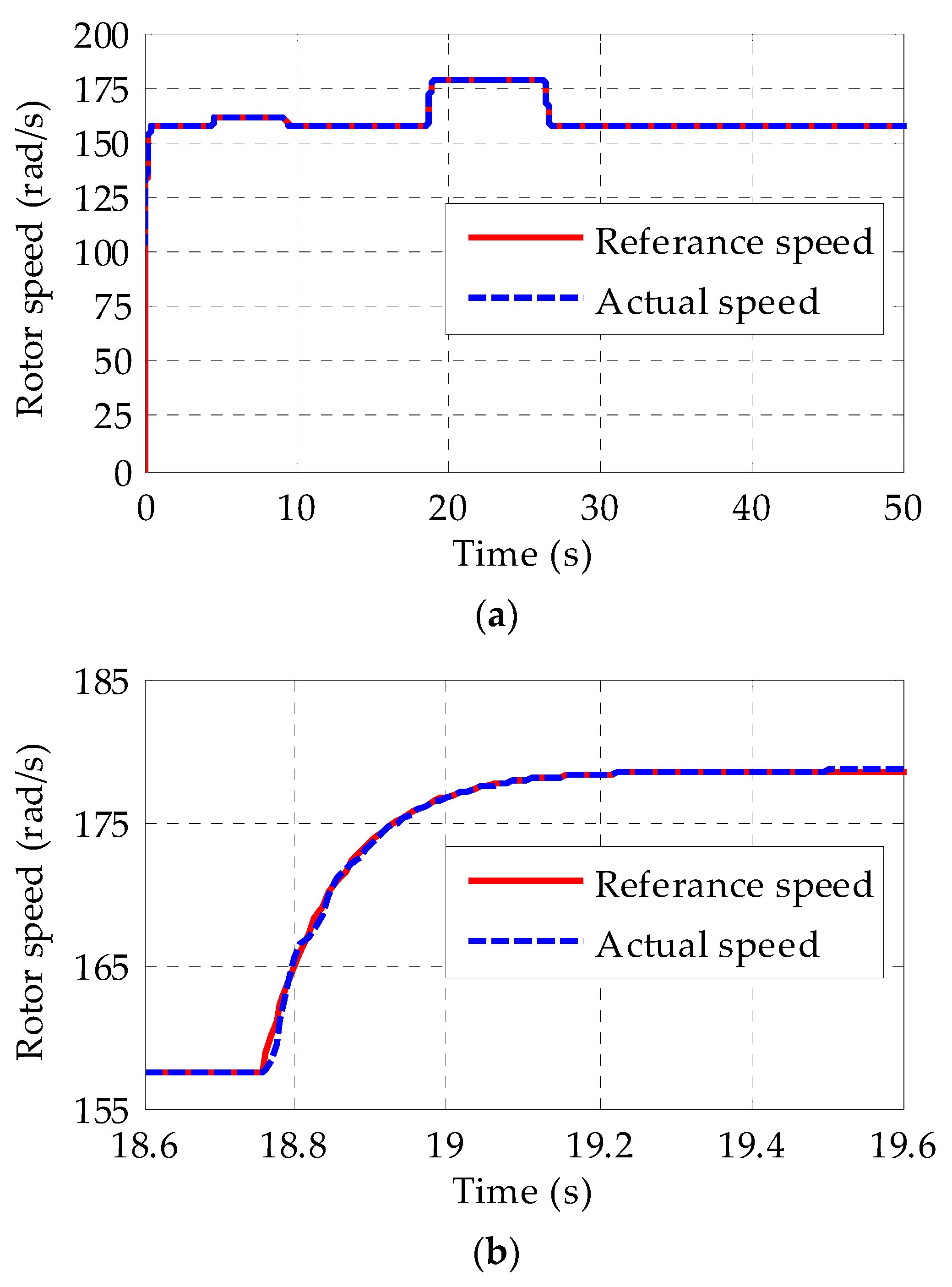
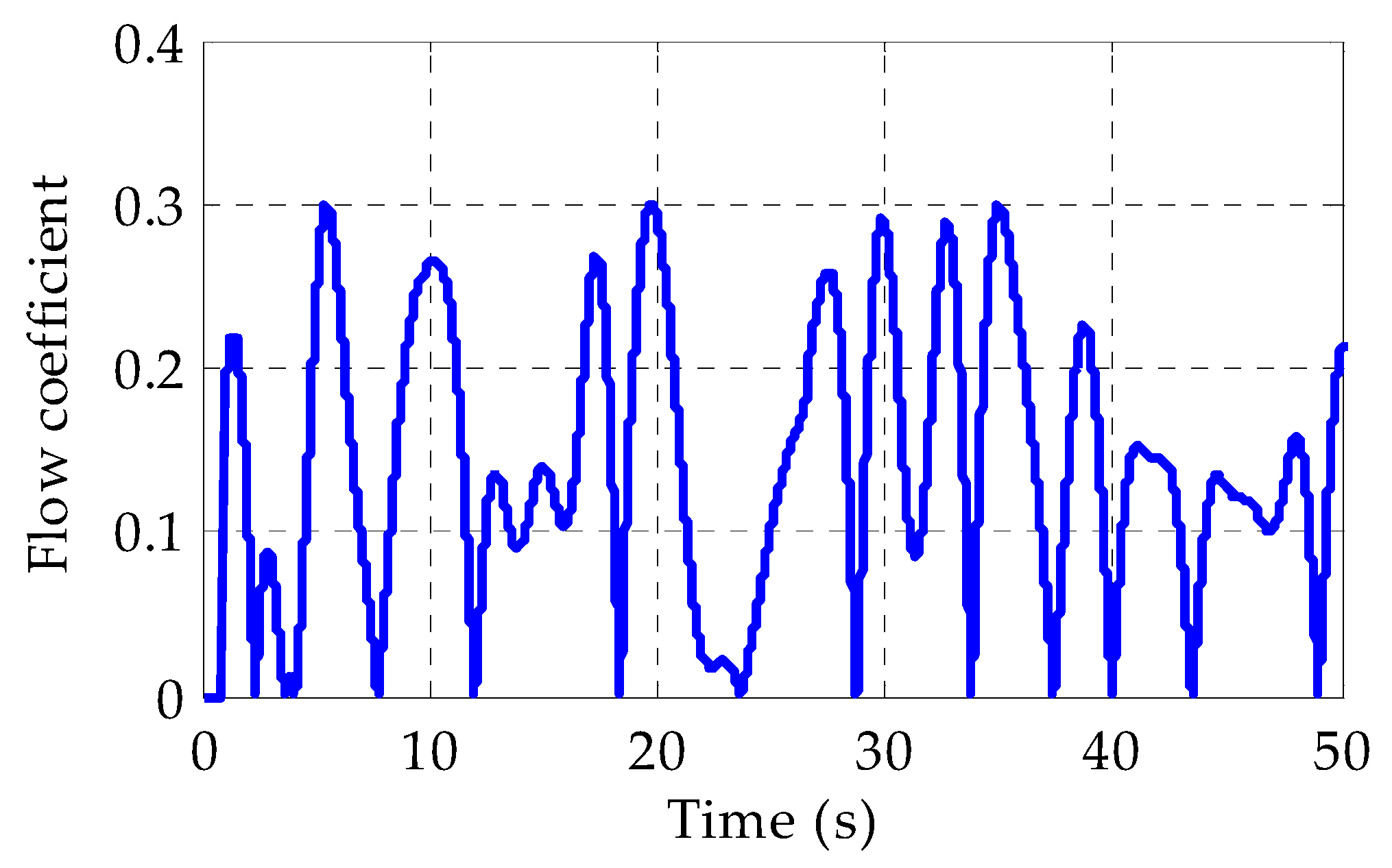
5.3. Performance of the AO-BSC Controlled OWC Plant
5.4. Performance of the GA-BSC Controlled OWC Plant
5.5. Performance Comparison of the AO, PSO and GA OWC Plant
6. Conclusions and Future Scope
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kabir, E.; Kumar, P.; Kumar, S.; Adelodun, A.A.; Kim, K.H. Solar energy: Potential and future prospects. Renew. Sustain. Energy Rev. 2018, 82, 894–900. [Google Scholar] [CrossRef]
- Ferrero Bermejo, J.; Gómez Fernández, J.F.; Olivencia Polo, F.; Crespo Márquez, A. A review of the use of artificial neural network models for energy and reliability prediction. A study of the solar PV 2019, hydraulic and wind energy sources. Appl. Sci. 2019, 9, 1844. [Google Scholar] [CrossRef] [Green Version]
- Novo, P.G.; Kyozuka, Y. Tidal stream energy as a potential continuous power producer: A case study for West Japan. Energy Convers. Manag. 2021, 245, 114533. [Google Scholar] [CrossRef]
- Thaeer Hammid, A.; Awad, O.I.; Sulaiman, M.H.; Gunasekaran, S.S.; Mostafa, S.A.; Manoj Kumar, N.; Khalaf, B.A.; Al-Jawhar, Y.A.; Abdulhasan, R.A. A review of optimization algorithms in solving hydro generation scheduling problems. Energies 2020, 13, 2787. [Google Scholar] [CrossRef]
- Guo, B.; Ahmadian, R.; Falconer, R.A. Refined hydro-environmental modelling for tidal energy generation: West Somerset Lagoon case study. Renew. Energy 2021, 179, 2104–2123. [Google Scholar] [CrossRef]
- Damacharla, P.; Fard, A.J. A Rolling Electrical Generator Design and Model for Ocean Wave Energy Conversion. Inventions 2020, 5, 3. [Google Scholar] [CrossRef] [Green Version]
- Portillo Juan, N.; Negro Valdecantos, V.; Esteban, M.D.; López Gutiérrez, J.S. Review of the Influence of Oceanographic and Geometric Parameters on Oscillating Water Columns. J. Mar. Sci. Eng. 2022, 10, 226. [Google Scholar] [CrossRef]
- Crooks, J.M.; Hewlin Jr, R.L.; Williams, W.B. Computational Design Analysis of a Hydrokinetic Horizontal Parallel Stream Direct Drive Counter-Rotating Darrieus Turbine System: A Phase One Design Analysis Study. Energies 2022, 15, 8942. [Google Scholar] [CrossRef]
- Hong, Y.; Waters, R.; Boström, C.; Eriksson, M.; Engström, J.; Leijon, M. Review on electrical control strategies for wave energy converting systems. Renew. Sustain. Energy Rev. 2014, 31, 329–342. [Google Scholar] [CrossRef]
- Ceballos, S.; Rea, J.; Robles, E.; Lopez, I.; Pou, J.; O’Sullivan, D. Control strategies for combining local energy storage with wells turbine oscillating water column devices. Renew. Energy 2015, 83, 1097–1109. [Google Scholar] [CrossRef]
- Lekube, J.; Garrido, A.J.; Garrido, I. Rotational speed optimization in oscillating water column wave power plants based on maximum power point tracking. IEEE Trans. Autom. Sci. Eng. 2016, 14, 681–691. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Gato, L.M.C.; Falcao, A.D.O.; Robles, E.; Faÿ, F.X. Latching control of a floating oscillating-water-column wave energy converter. Renew. Energy 2016, 90, 229–241. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Gato, L.M.C.; Lemos, J.M.; Gomes, R.P.F.; Falcão, A.F.O. Peak-power control of a grid-integrated oscillating water column wave energy converter. Energy 2016, 109, 378–390. [Google Scholar] [CrossRef] [Green Version]
- Mishra, S.K.; Purwar, S.; Kishor, N. An optimal and non-linear speed control of oscillating water column wave energy plant with wells turbine and DFIG. Int. J. Renew. Energy Res. 2016, 6, 995–1006. [Google Scholar]
- Mishra, S.K.; Purwar, S.; Kishor, N. Design of non-linear controller for ocean wave energy plant. Control. Eng. Pract. 2016, 56, 111–122. [Google Scholar] [CrossRef]
- Lekube, J.; Garrido, A.J.; Garrido, I.; Otaola, E.; Maseda, J. Flow control in wells turbines for harnessing maximum wave power. Sensors 2018, 18, 535. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mishra, S.K.; Purwar, S.; Kishor, N. Event-triggered nonlinear control of OWC ocean wave energy plant. IEEE Trans. Sustain. Energy 2018, 9, 1750–1760. [Google Scholar] [CrossRef]
- M’zoughi, F.; Bouallegue, S.; Garrido, A.J.; Garrido, I.; Ayadi, M. Fuzzy gain scheduled PI-based airflow control of an oscillating water column in wave power generation plants. IEEE J. Ocean. Eng. 2018, 44, 1058–1076. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Self-adaptive global-best harmony search algorithm-based airflow control of a wells-turbine-based oscillating-water column. Appl. Sci. 2020, 10, 4628. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Garrido, A.J. Symmetry-breaking for airflow control optimization of an oscillating-water-column system. Symmetry 2020, 12, 895. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. ANN-based airflow control for an oscillating water column using surface elevation measurements. Sensors 2020, 20, 1352. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maria-Arenas, A.; Garrido, A.J.; Rusu, E.; Garrido, I. Control strategies applied to wave energy converters: State of the art. Energies 2019, 12, 3115. [Google Scholar] [CrossRef] [Green Version]
- Henriques, J.C.C.; Portillo, J.C.C.; Sheng, W.; Gato, L.M.C.; Falcão, A.D.O. Dynamics and control of air turbines in oscillating-water-column wave energy converters: Analyses and case study. Renew. Sustain. Energy Rev. 2019, 112, 571–589. [Google Scholar] [CrossRef]
- Mishra, S.K.; Appasani, B.; Jha, A.V.; Garrido, I.; Garrido, A.J. Centralized Airflow Control to Reduce Output Power Variation in a Complex OWC Ocean Energy Network. Complexity 2020, 2020, 2625301. [Google Scholar] [CrossRef]
- Mishra, S.K.; Appasani, B.; Verma, V.K.; Jha, A.V.; Kumar, M.R.; Pati, A. PID Control of the OWC Plant to Improve Ocean Wave Energy Capture. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; IEEE: New York City, NY, USA, 2020; pp. 1–6. [Google Scholar]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De la Sen, M. Fuzzy gain scheduled-sliding mode rotational speed control of an oscillating water column. IEEE Access 2020, 8, 45853–45873. [Google Scholar] [CrossRef]
- Napole, C.; Barambones, O.; Derbeli, M.; Cortajarena, J.A.; Calvo, I.; Alkorta, P.; Bustamante, P.F. Double fed induction generator control design based on a fuzzy logic controller for an oscillating water column system. Energies 2021, 14, 3499. [Google Scholar] [CrossRef]
- Magaña, M.E.; Parlapanis, C.; Gaebele, D.T.; Sawodny, O. Maximization of Wave Energy Conversion into Electricity Using Oscillating Water Columns and Nonlinear Model Predictive Control. IEEE Trans. Sustain. Energy 2021, 13, 1283–1292. [Google Scholar] [CrossRef]
- Gaebele, D.T.; Magana, M.E.; Brekken, T.K.; Henriques, J.C.; Carrelhas, A.A.; Gato, L.M. Second order sliding mode control of oscillating water column wave energy converters for power improvement. IEEE Trans. Sustain. Energy 2020, 12, 1151–1160. [Google Scholar] [CrossRef]
- Noman, M.; Li, G.; Wang, K.; Han, B. Electrical control strategy for an ocean energy conversion system. Prot. Control. Mod. Power Syst. 2021, 6, 12. [Google Scholar] [CrossRef]
- Mishra, S.K.; Mohanta, D.K.; Appasani, B.; Kabalci, E. OWC-Based Ocean Wave Energy Plants; Springer: Singapore, 2021. [Google Scholar]
- Suchithra, R.; Samad, A. Control of Wave Energy Converters. In Ocean Wave Energy Systems: Hydrodynamics 2021, Power Takeoff and Control Systems; Springer International Publishing: Cham, Switzerland, 2021; pp. 471–486. [Google Scholar]
- Roh, C.; Kim, K.H. Deep learning prediction for rotational speed of turbine in oscillating water column-type wave energy converter. Energies 2022, 15, 572. [Google Scholar] [CrossRef]
- Ciappi, L.; Simonetti, I.; Bianchini, A.; Cappietti, L.; Manfrida, G. Application of integrated wave-to-wire modelling for the preliminary design of oscillating water column systems for installations in moderate wave climates. Renew. Energy 2022, 194, 232–248. [Google Scholar] [CrossRef]
- Ciappi, L.; Stebel, M.; Smolka, J.; Cappietti, L.; Manfrida, G. Analytical and computational fluid dynamics models of wells turbines for oscillating water column systems. J. Energy Resour. Technol. 2022, 144, 050903. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, S.; Lu, K.H. Improvement of Stability in an Oscillating Water Column Wave Energy Using an Adaptive Intelligent Controller. Energies 2022, 16, 133. [Google Scholar] [CrossRef]
- Darwish, A.; Aggidis, G.A. A Review on Power Electronic Topologies and Control for Wave Energy Converters. Energies 2022, 15, 9174. [Google Scholar] [CrossRef]
- Silva, J.M.; Vieira, S.M.; Valério, D.; Henriques, J.C. GA-optimized inverse fuzzy model control of OWC wave power plants. Renew. Energy 2023, 204, 556–568. [Google Scholar] [CrossRef]
- Carrelhas, A.A.D.; Gato, L.M.C.; Henriques, J.C.C. Peak shaving control in OWC wave energy converters: From concept to implementation in the Mutriku wave power plant. Renew. Sustain. Energy Rev. 2023, 180, 113299. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-Qaness, M.A.; Gandomi, A.H. Aquila optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization: An overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Clerc, M. Particle Swarm Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 93. [Google Scholar]
- Mishra, S.K.; Chandra, D. Stabilization and tracking control of inverted pendulum using fractional order PID controllers. J. Eng. 2014, 2014, 752918. [Google Scholar] [CrossRef] [Green Version]
- Golberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison Wesley: Boston, MA, USA, 1989; p. 36. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chamber: Ao = 7.5 m2; Ad = 1.18 m2 | DFIG: p = 4; Rs = 0.0181; Rr = 0.0334; Ls = 7.543; Lr = 7.573; Lm = 7.413; Vs = 390/ V; ωe = 100π rad/s; F = 0.02; J = 50; Pgen-rated = 100.0 kW |
| Wells Turbine: ktur = 0.7079; r = 0.3643 m | |
| Initial Conditions: ωr0 = 100 rad/s; ψds0 = ψs = Vs/ωe = 0.7167 Wb; ψqs0 = ψdr0 = ψqr0 = 0 Wb | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mishra, S.K.; Jha, A.V.; Appasani, B.; Bizon, N.; Thounthong, P.; Mungporn, P. Ocean Wave Energy Control Using Aquila Optimization Technique. Energies 2023, 16, 4495. https://doi.org/10.3390/en16114495
Mishra SK, Jha AV, Appasani B, Bizon N, Thounthong P, Mungporn P. Ocean Wave Energy Control Using Aquila Optimization Technique. Energies. 2023; 16(11):4495. https://doi.org/10.3390/en16114495
Chicago/Turabian StyleMishra, Sunil Kumar, Amitkumar V. Jha, Bhargav Appasani, Nicu Bizon, Phatiphat Thounthong, and Pongsiri Mungporn. 2023. "Ocean Wave Energy Control Using Aquila Optimization Technique" Energies 16, no. 11: 4495. https://doi.org/10.3390/en16114495