
Development of Virtual Flow-Meter Concept Techniques for Ground Infrastructure Management
 and
and
Abstract
:1. Introduction
2. Methodological Approaches
2.1. Mathematical Model of an Unsteady Flow of a Multiphase Fluid
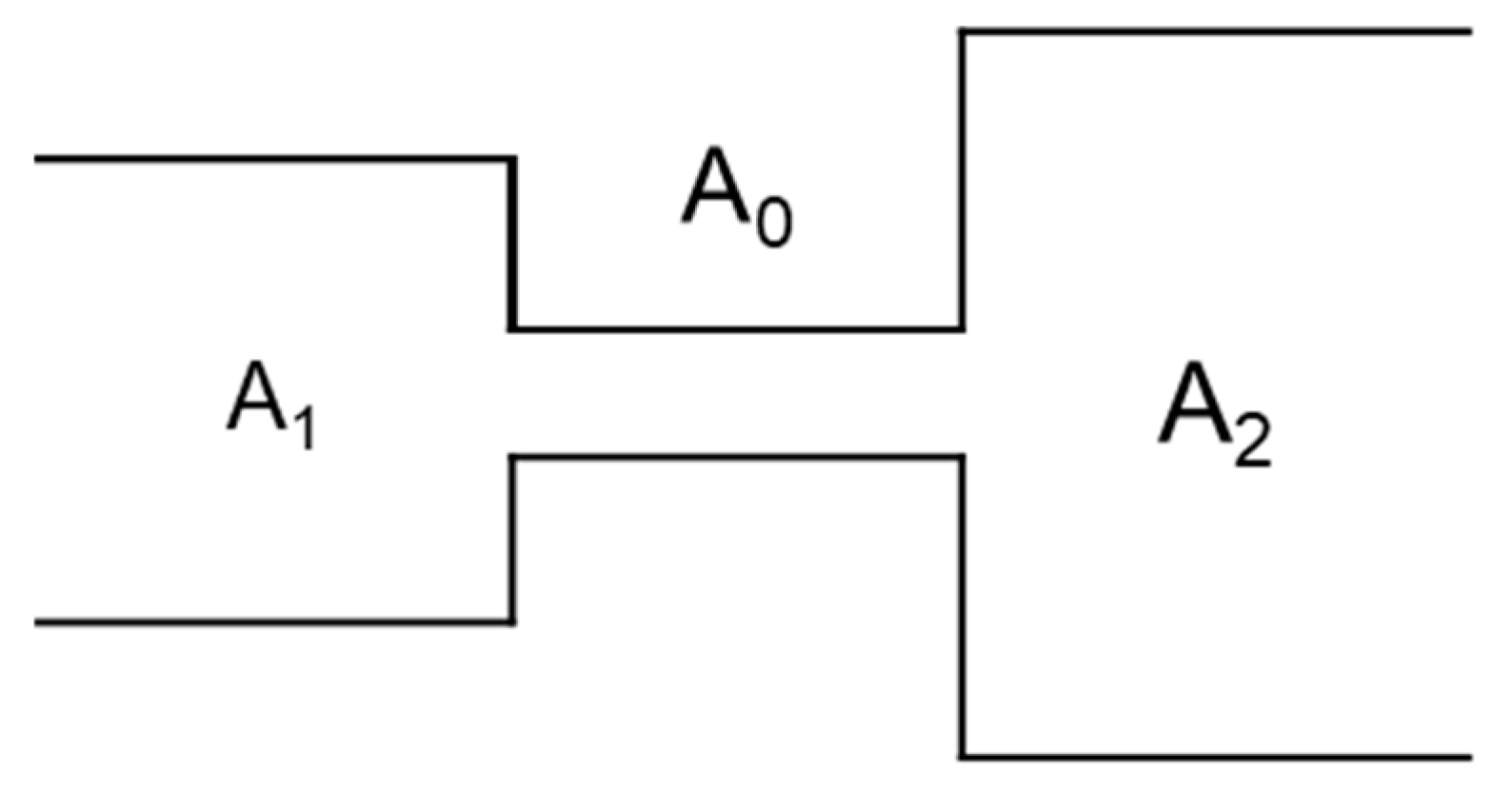
2.2. Choke Model
- at :
- at :
- at :
- at :
- at :where , ;
- at :where , ;
- at : .
2.3. ESP Model
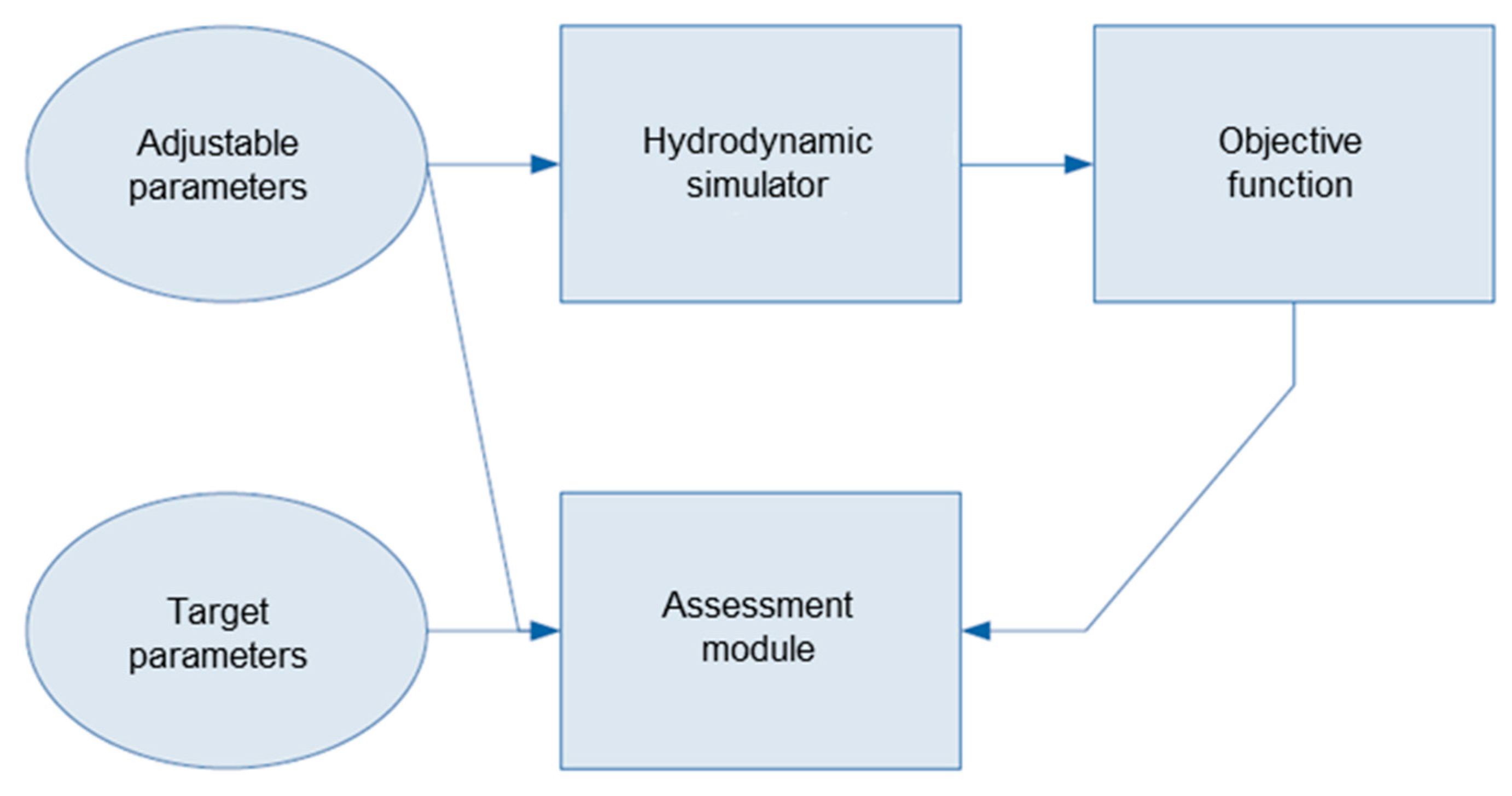
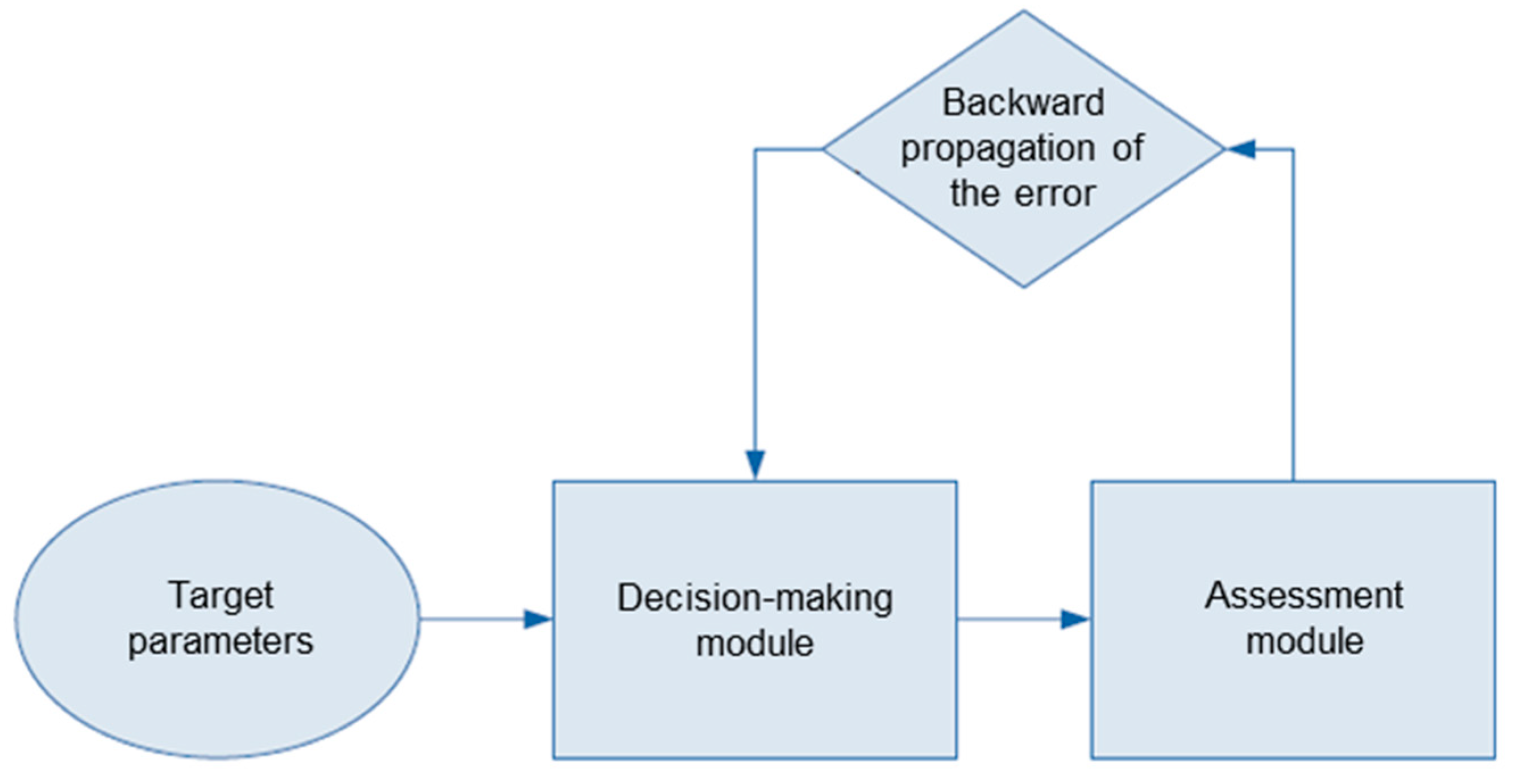
3. Method of Automatic Adjustment to the Actual Data
3.1. Problem Statement
3.2. Validation of Correctness
3.3. Automatic Adjustment Quality
4. Discussion
5. Results and Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Klapchuk, O.V. Hydraulic characteristics of gas-liquid flows in wells. Gas Ind. 1981, 2, 32–35. [Google Scholar]
- Hagedorn, A.R.; Brown, K.E. Experimental study of pressure gradients occurring during continuous two-phase flow in small-diameter vertical conduits. J. Pet. Technol. 1965, 17, 475–484. [Google Scholar] [CrossRef]
- Duns, H., Jr.; Ros, N.C.J. Vertical flow of gas and liquid mixtures in wells. In Proceedings of the 6th World Petroleum Congress, Frankfurt, Germany, 19–26 June 1963. [Google Scholar]
- Orkiszewski, J. Predicting two-phase pressure drops in vertical pipe. J. Pet. Technol. 1963, 19, 829–838. [Google Scholar] [CrossRef]
- Oloruntoba, O.; Kara, F. Simplified Transient Two-Phase Model for Pipe Flow. Int. J. Mod. Eng. 2017, 17, 2. [Google Scholar]
- Taitel, Y.; Barnea, D. Simplified transient simulation of two phase flow using quasi-equilibrium momentum balances. Int. J. Multiph. Flow 1997, 23, 493–501. [Google Scholar] [CrossRef]
- Lockhart, R.W.; Martinelli, R.C. Proposed correlation of data for isothermal two-phase, two-component flow in pipes. Chem. Eng. Prog. 1949, 45, 39–48. [Google Scholar]
- Idelchik, I.E. Reference Book on Hydraulic Resistance, 3rd ed.; Steinberg, M.O., Ed.; Mashinostroyeniye: Moscow, Russia, 1992. [Google Scholar]
- Lykhin, P.A.; Usov, E.V.; Chukhno, V.I.; Kurmangaliyev, R.Z.; Ulyanov, V.N. Simulation of gas-liquid flows in a deviated well. Autom. Telemech. Commun. Oil Ind. 2019, 10, 22–27. [Google Scholar] [CrossRef]
- Available online: https://www.tensorflow.org/ (accessed on 8 November 2022).
- Usov, E.V.; Tokarev, D.N.; Ulyanov, V.N.; Vylegzhanin, R.I. Problems of integration of monitoring and simulation tasks in distributed hydraulic systems of an oil-gathering network. Autom. Telemech. Commun. Oil Ind. 2019, 11, 9–14. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i/j | 10 ≤ Re ≤ 2 × 103 | 2E3 ≤ Re ≤ 4 × 103 | ||||
|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 0 | 1 | 2 | |
| 0 | 1.07 | 1.22 | 2.9333 | 0.5443 | −17.298 | −40.715 |
| 1 | 0.05 | −0.51668 | 0.8333 | −0.06518 | 8.7616 | 22.782 |
| 2 | 0 | 0 | 0 | 0.05239 | −1.1093 | −3.1509 |
| Depth along the Wellbore, m | Azimuthal Angle, ° |
|---|---|
| 0 | 1.9 |
| 270 | 2.0 |
| 400 | 0.9 |
| 820 | 0.7 |
| 950 | 0.9 |
| 2070 | 3.2 |
| 2220 | 11.9 |
| 2340 | 24.4 |
| 2470 | 29.0 |
| 2620 | 32.1 |
| 2770 | 28.5 |
| 2910 | 26.2 |
| 3060 | 28.9 |
| 3200 | 28.4 |
| 3350 | 23.8 |
| 3460 | 11.6 |
| 3580 | 1.3 |
| 3880 | 0.0 |
| Properties | Density, kg/m3 |
|---|---|
| Gas | 0.8087 |
| Liquid | 765.8 |
| Pressure, Bar | Mixture Temperature, K | OGR | Watercut, % |
|---|---|---|---|
| 422 | 378.5 | 0.000715 | 0 |
| Parameter | Training Set | Test Set | ||||
|---|---|---|---|---|---|---|
| Simulator | Experiment | Error, % | Simulator | Experiment | Error, % | |
| Volume oil fraction | 6.5 (%) | 6.3 (%) | 3.3 | 5.9 (%) | 6.2 (%) | 4.8 |
| Volume gas fraction | 93.5 (%) | 93.7 (%) | 0.2 | 94.1 (%) | 93.8 (%) | 0.3 |
| Mass oil flow rate | 0.87 (kg/s) | 0.91 (kg/s) | 4.4 | 0.85 (kg/s) | 0.82 (kg/s) | 3.5 |
| Mass gas flow rate | 20.12 (kg/s) | 19.67 (kg/s) | 2.23 | 19.12 (kg/s) | 19.93 (kg/s) | 4.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vylegzhanin, R.; Cheremisin, A.; Kolchanov, B.; Lykhin, P.; Kurmangaliev, R.; Kozlov, M.; Usov, E.; Ulyanov, V. Development of Virtual Flow-Meter Concept Techniques for Ground Infrastructure Management. Energies 2023, 16, 400. https://doi.org/10.3390/en16010400
Vylegzhanin R, Cheremisin A, Kolchanov B, Lykhin P, Kurmangaliev R, Kozlov M, Usov E, Ulyanov V. Development of Virtual Flow-Meter Concept Techniques for Ground Infrastructure Management. Energies. 2023; 16(1):400. https://doi.org/10.3390/en16010400
Chicago/Turabian StyleVylegzhanin, Ruslan, Alexander Cheremisin, Boris Kolchanov, Pavel Lykhin, Rustam Kurmangaliev, Mikhail Kozlov, Eduard Usov, and Vladimir Ulyanov. 2023. "Development of Virtual Flow-Meter Concept Techniques for Ground Infrastructure Management" Energies 16, no. 1: 400. https://doi.org/10.3390/en16010400