



Roof Fall Hazard Monitoring and Evaluation—State-of-the-Art Review

 , ,
, ,
Abstract
:1. Introduction
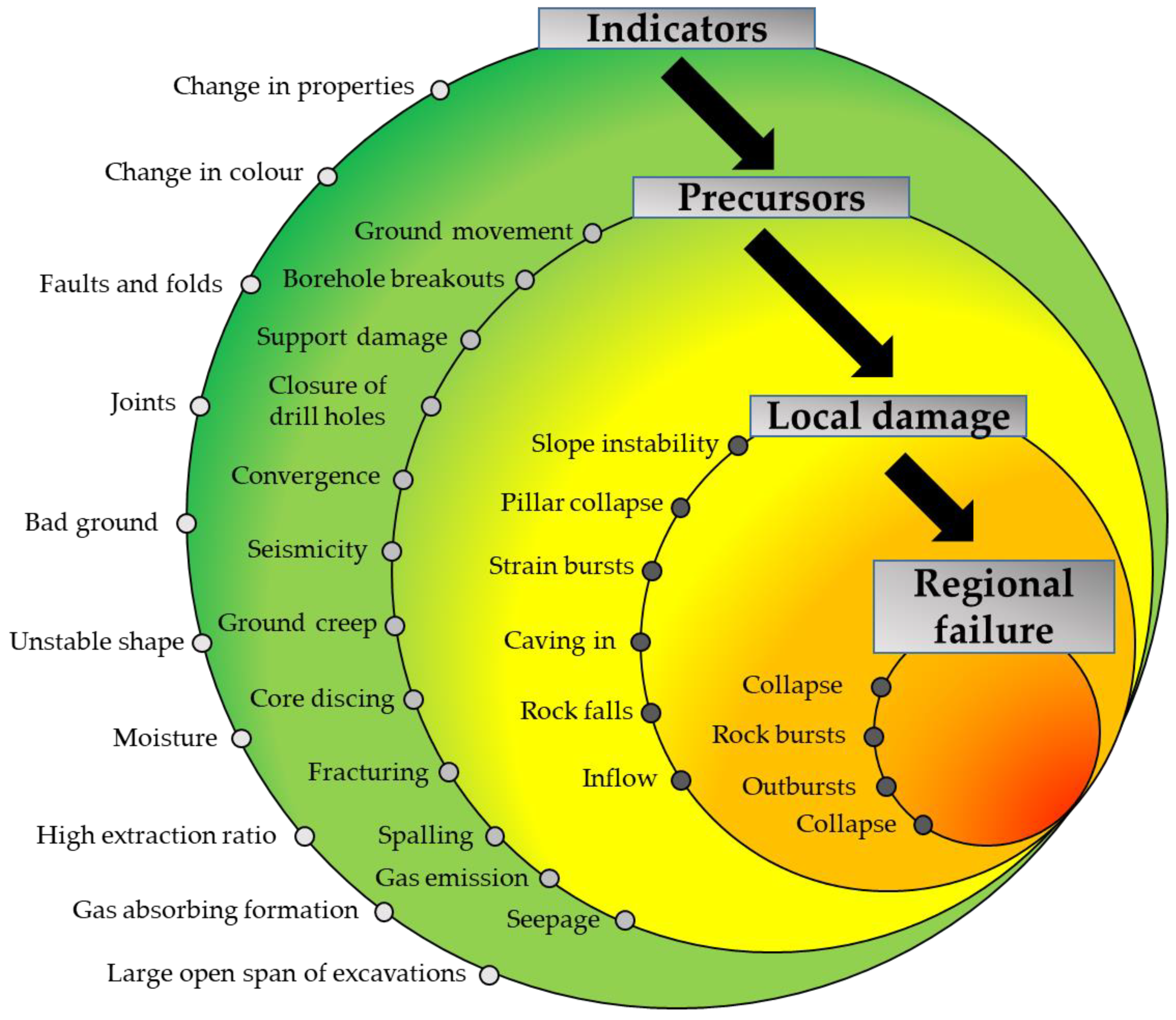
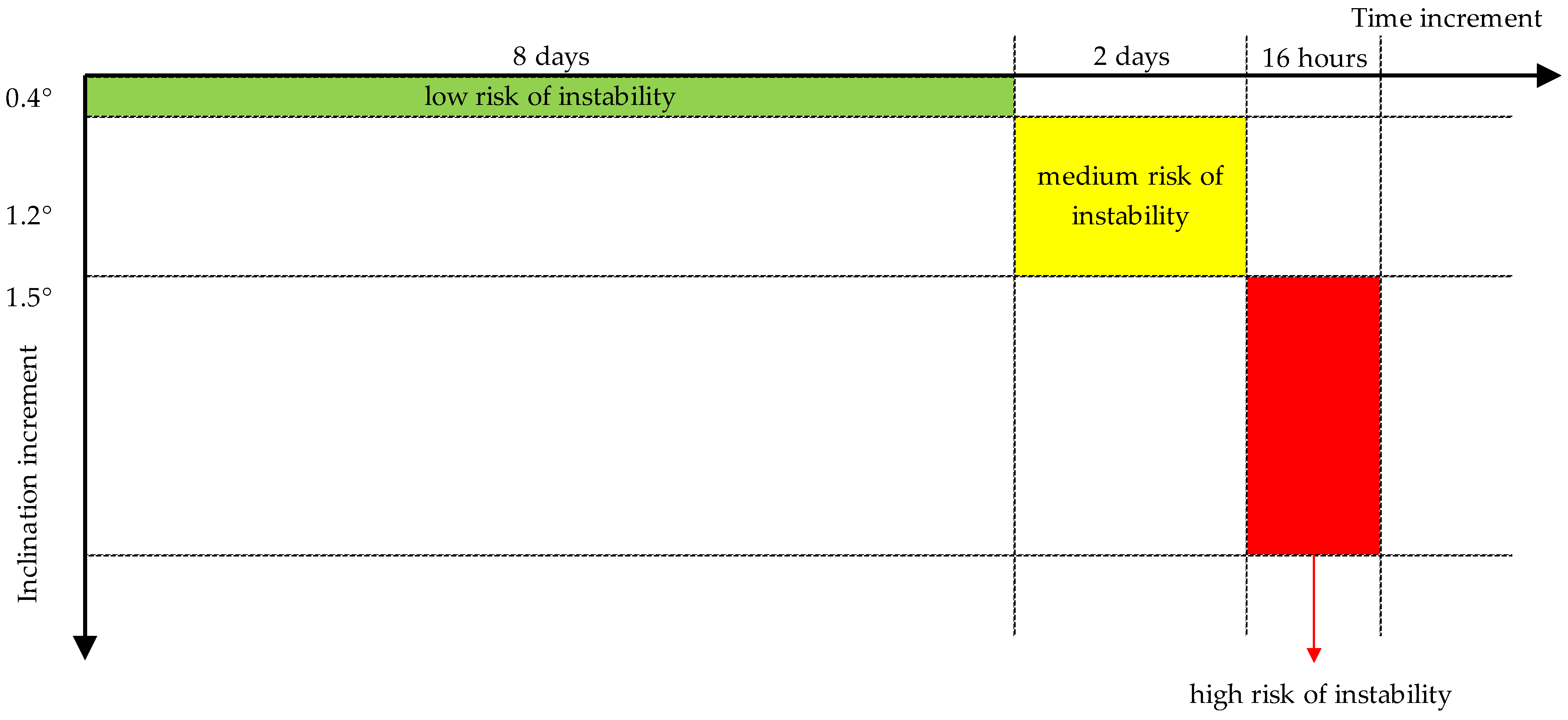
2. Indicators of Roof Fall Risk Development
3. Monitoring Systems—Current SoTA
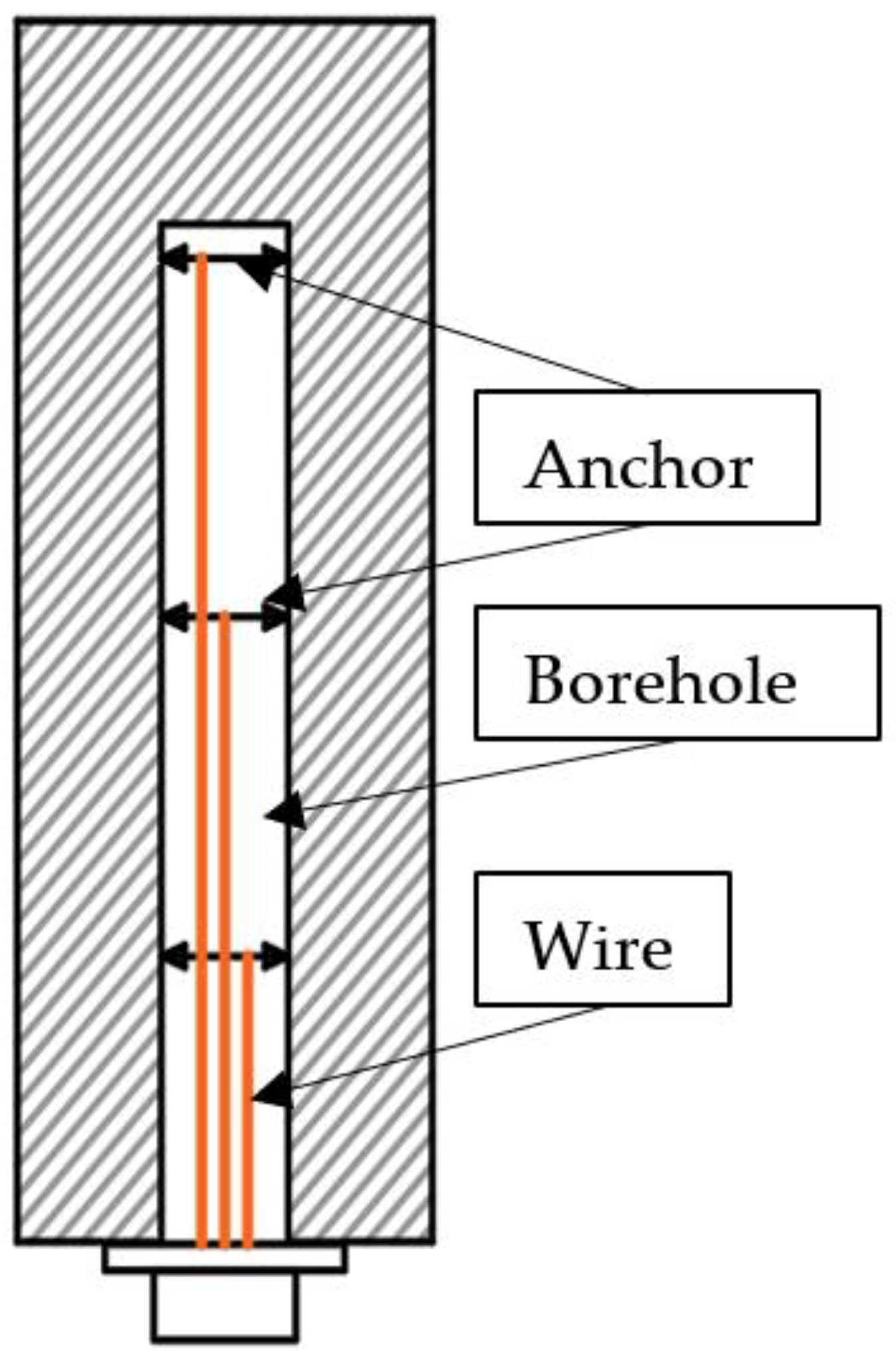
3.1. Borehole Monitoring
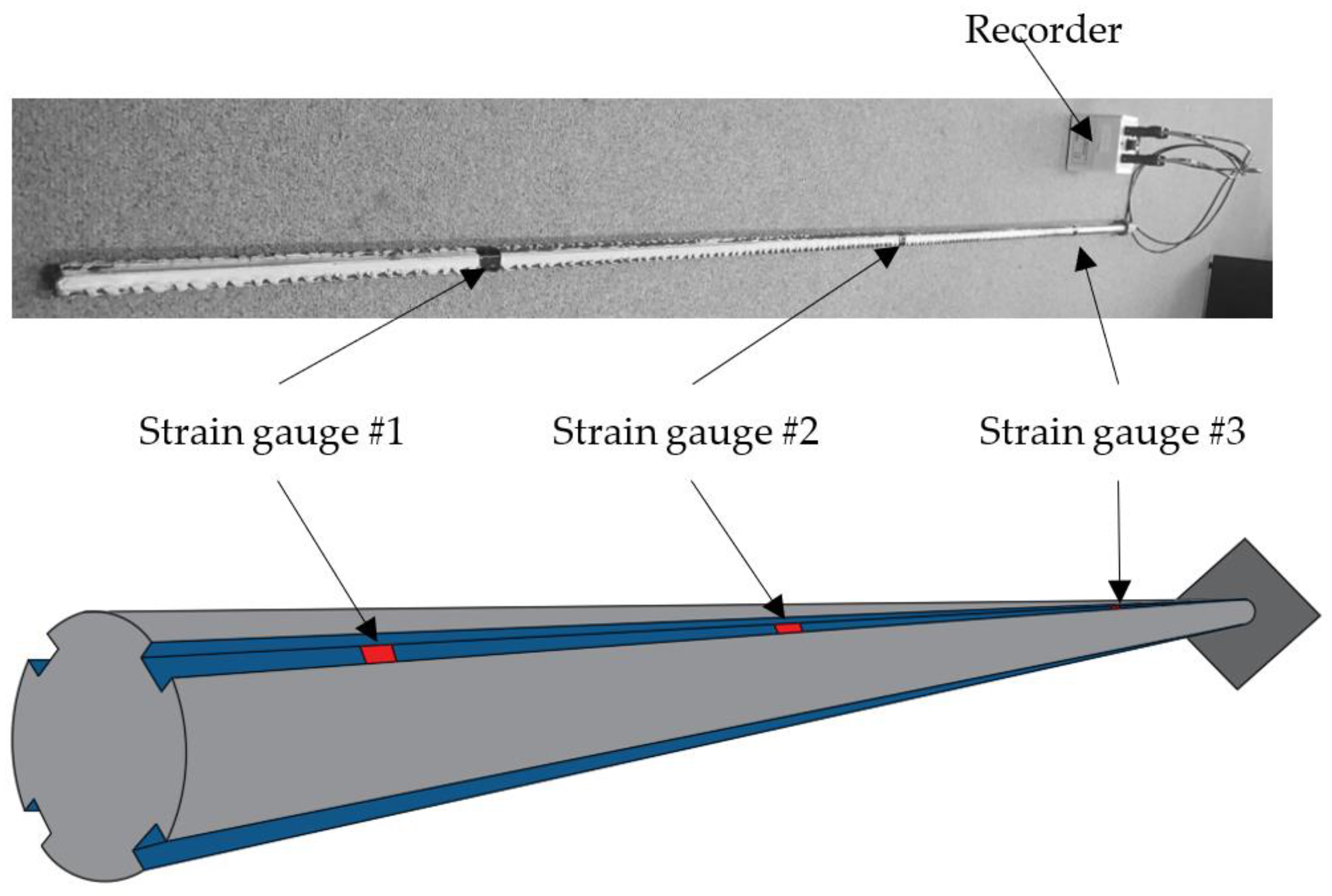
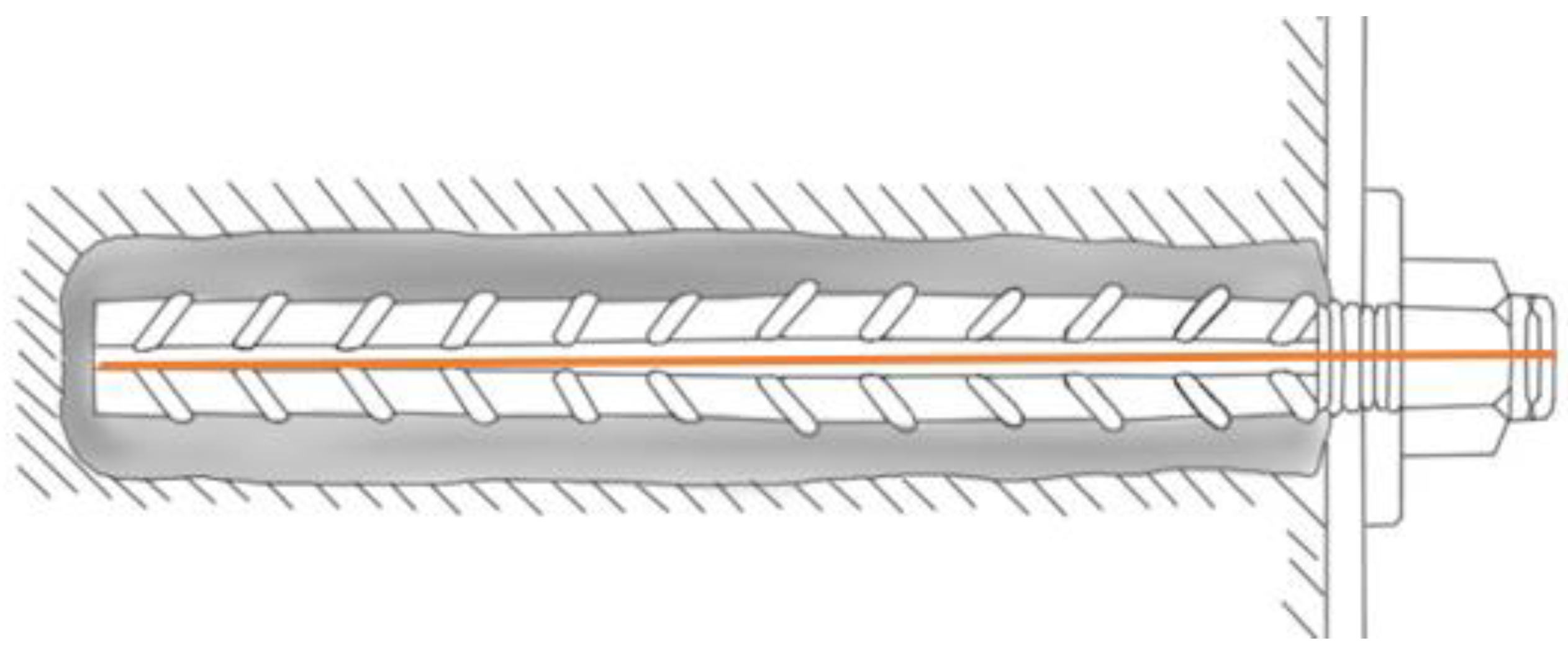
3.2. Instrumented Rock Bolt
- electric strain gauges;
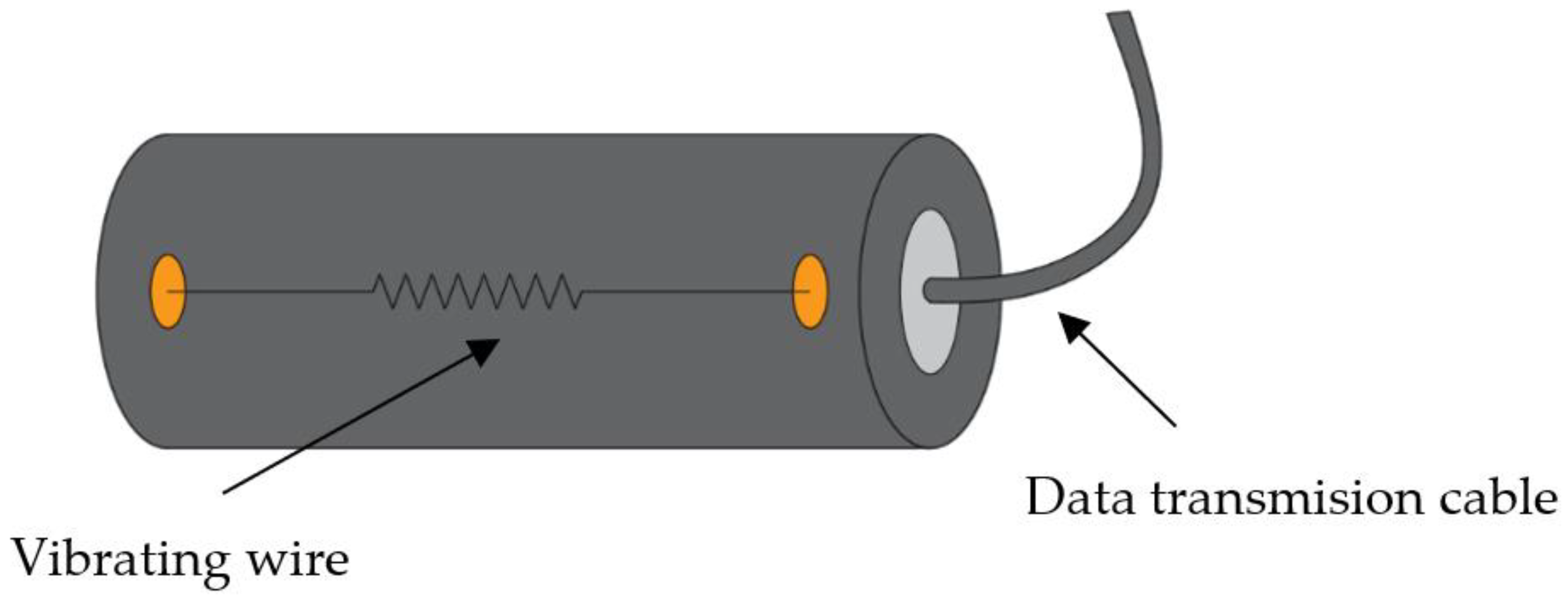
- vibrating wire;
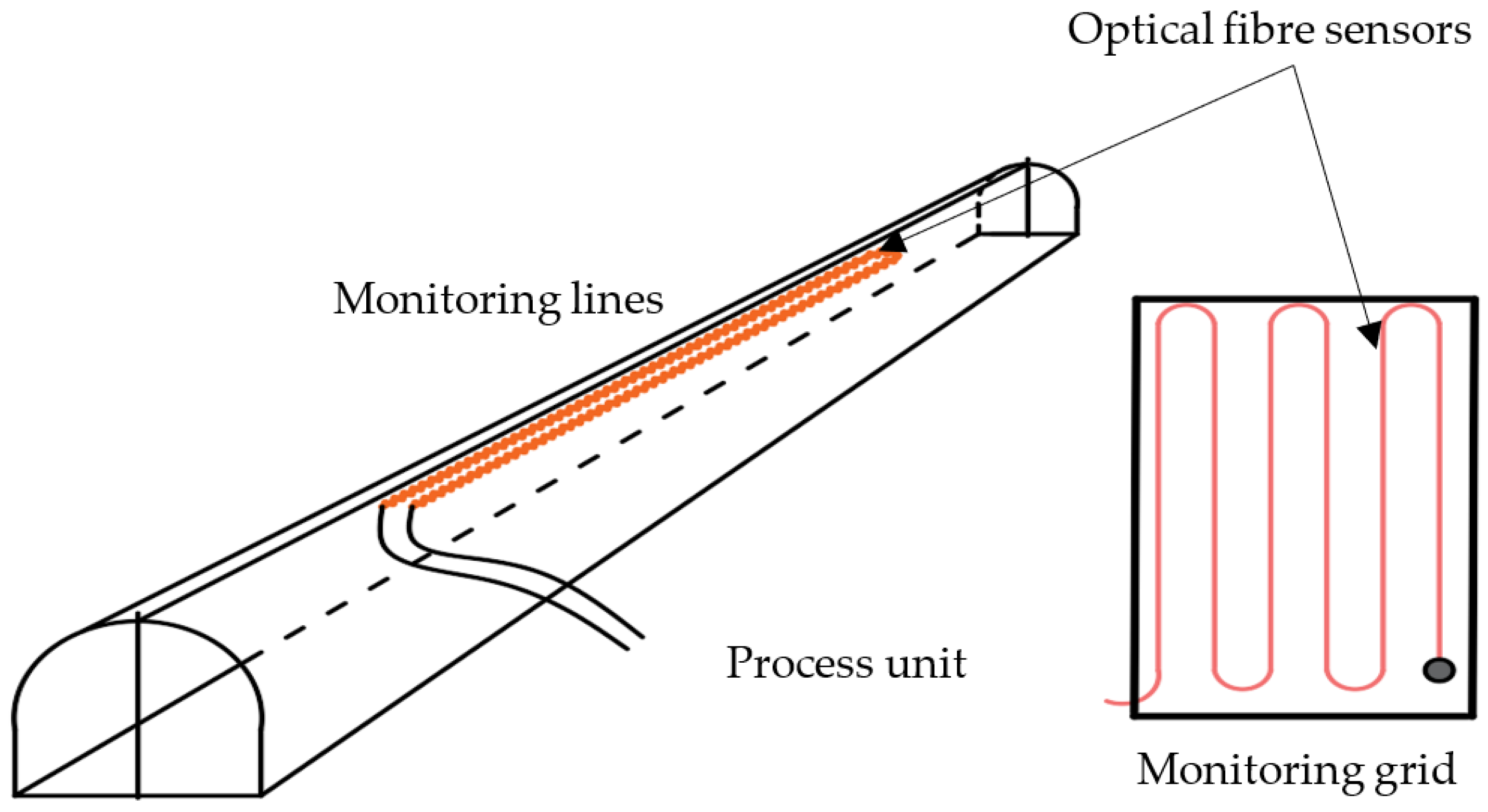
- optical fiber;
- ultrasonic.
3.3. Optical Fiber-Based Monitoring Systems
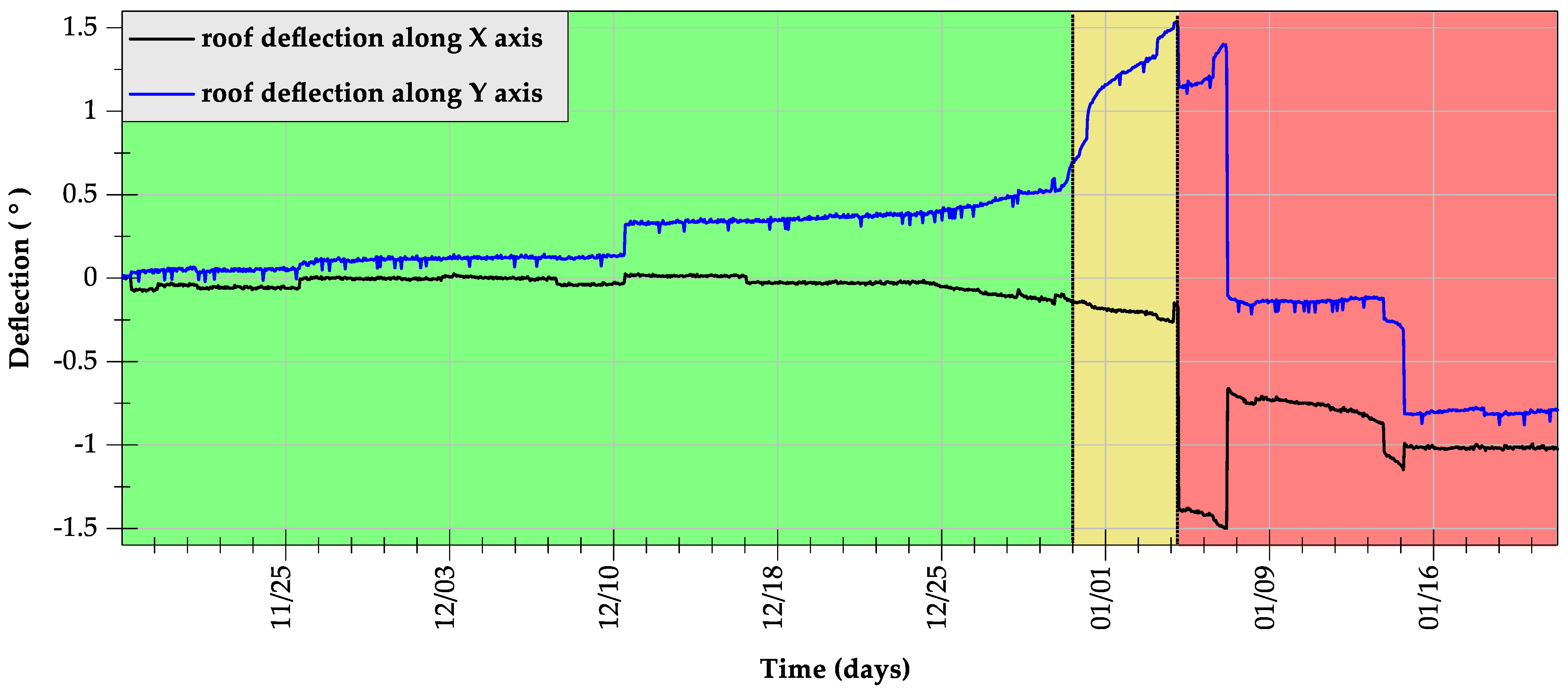
3.4. Roof Deflection and Delamination Measurements
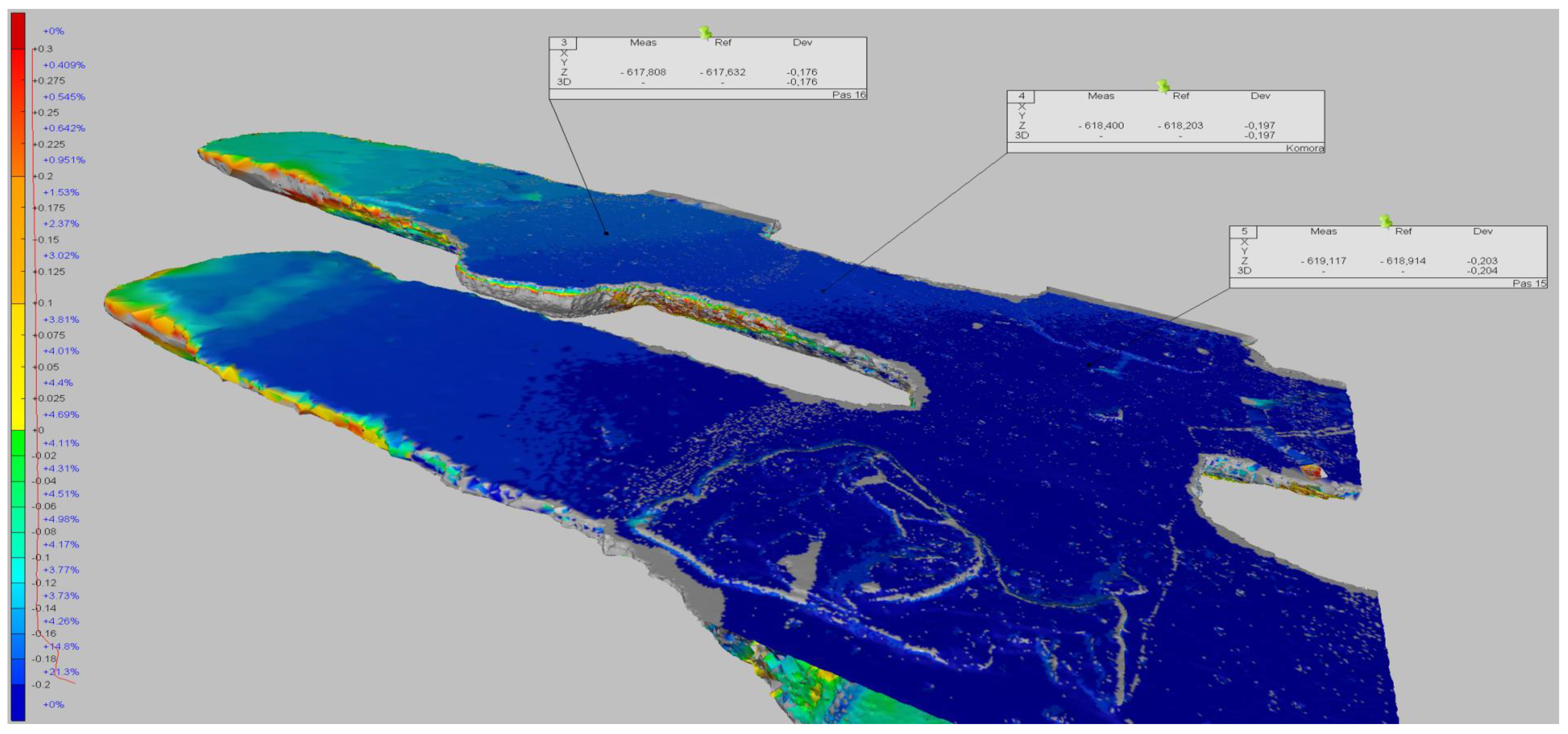
3.5. Geometry of Underground Workings
4. Analytical and Numerical Risk Evaluation
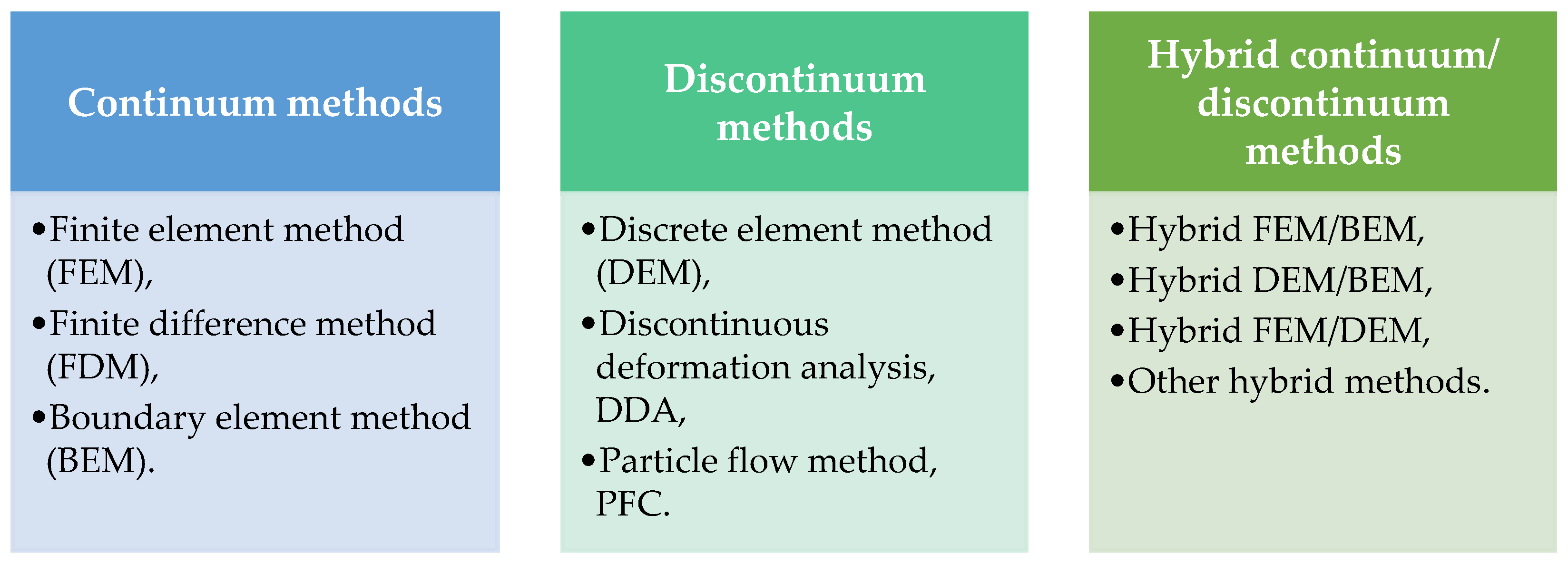
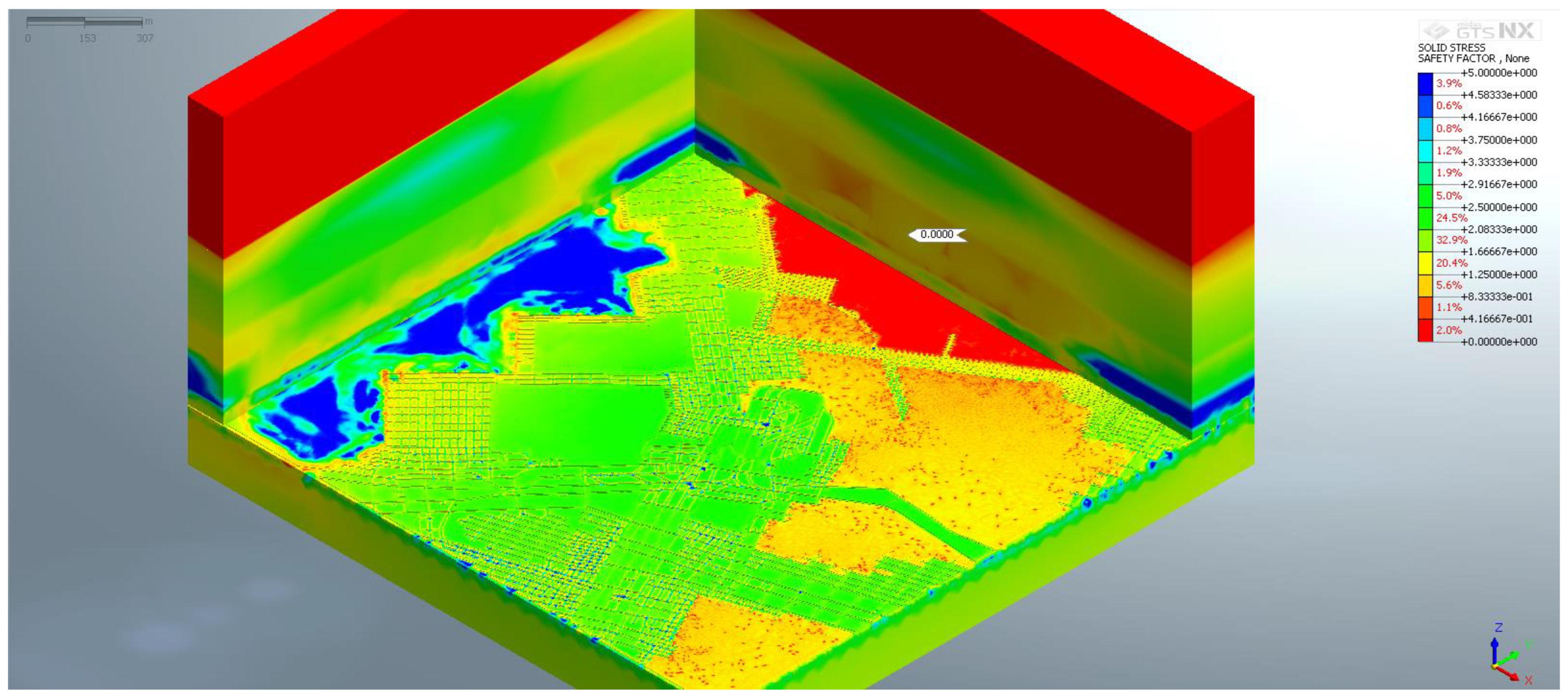
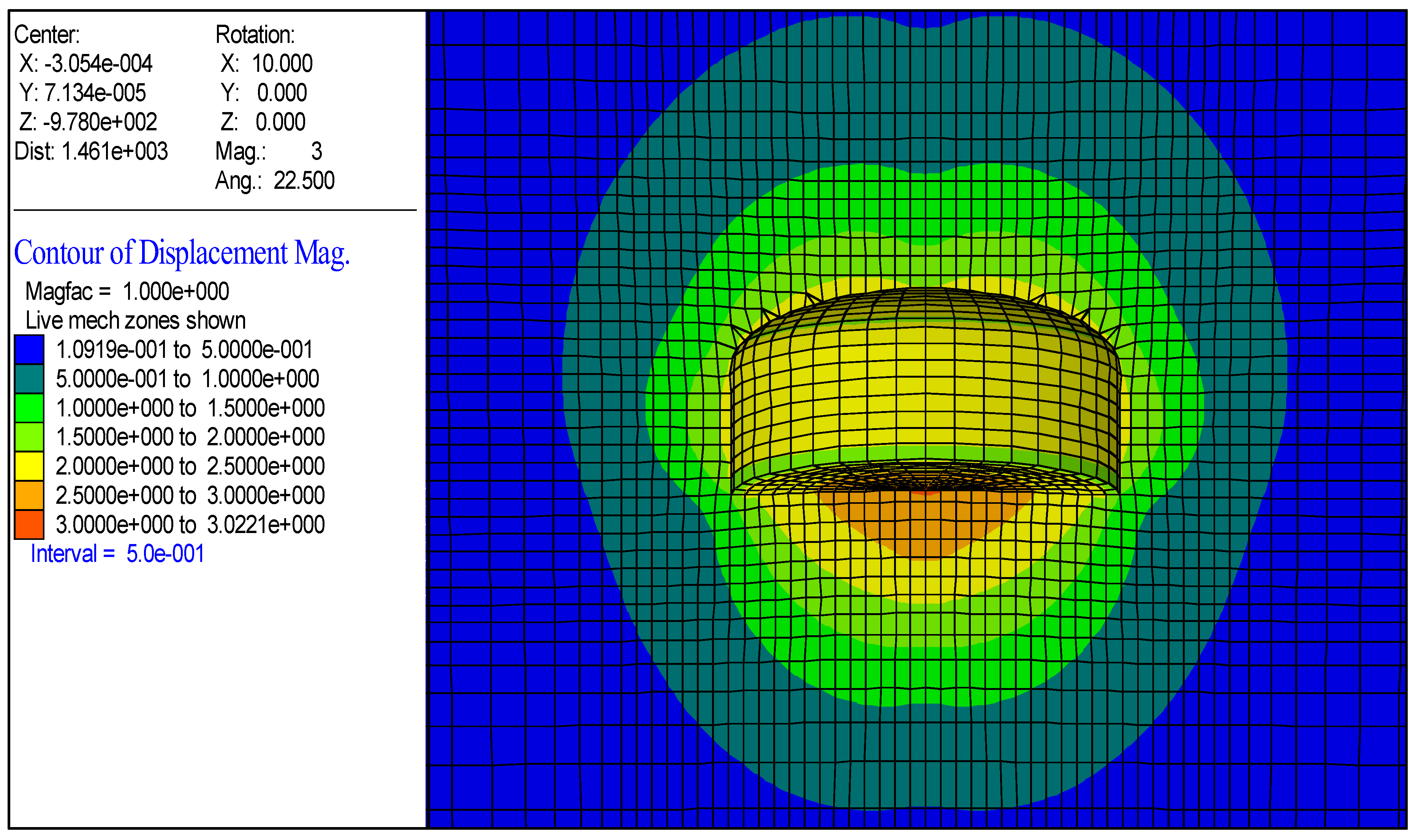
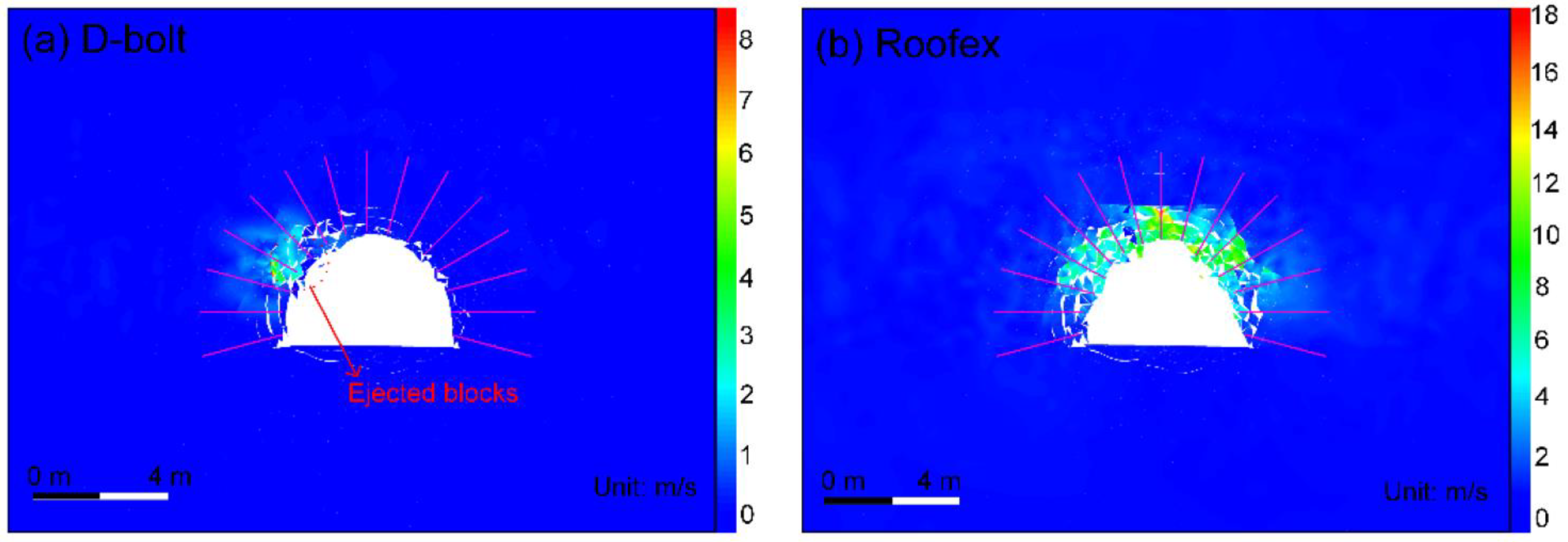
4.1. Numerical Modeling
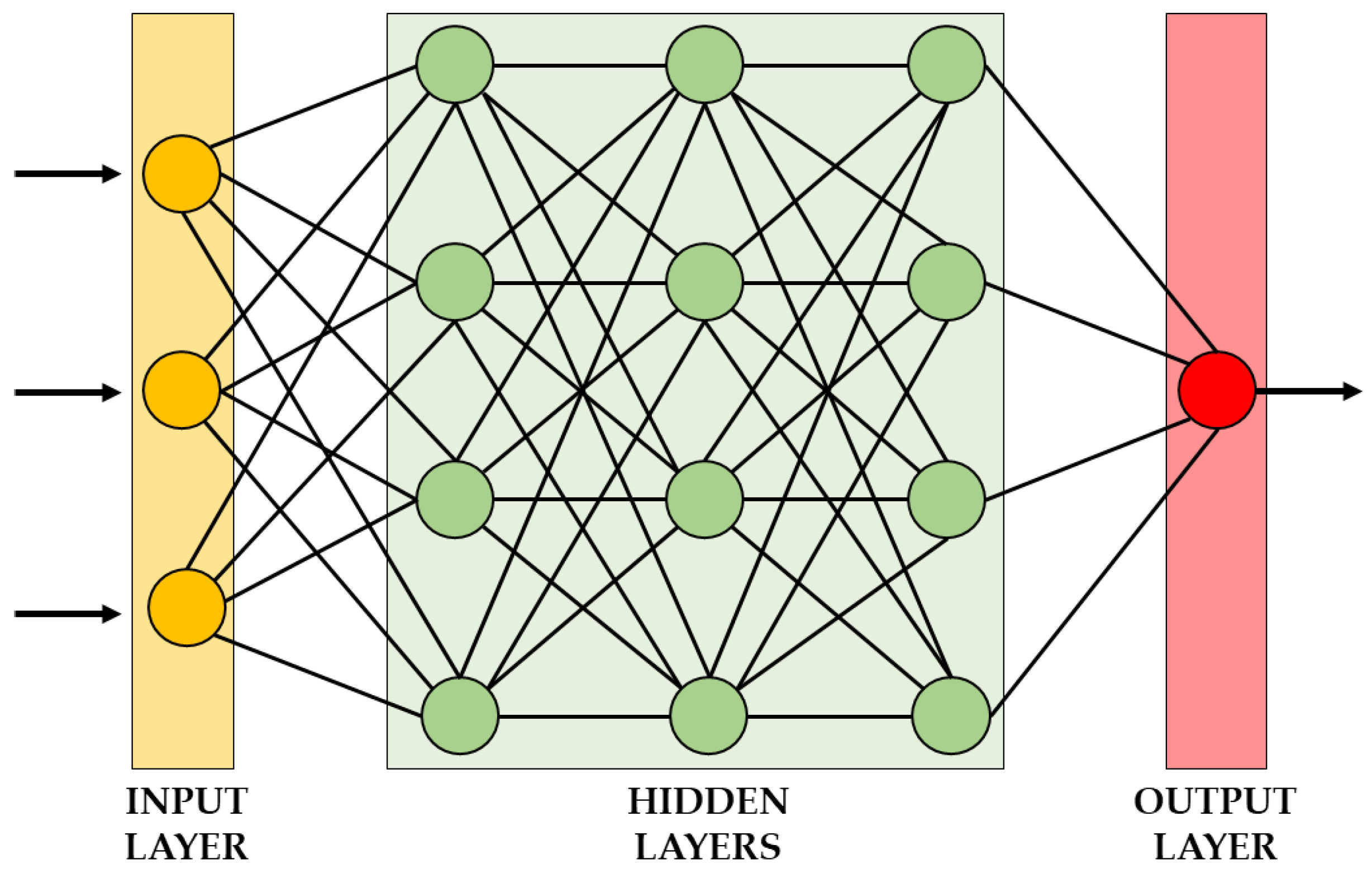
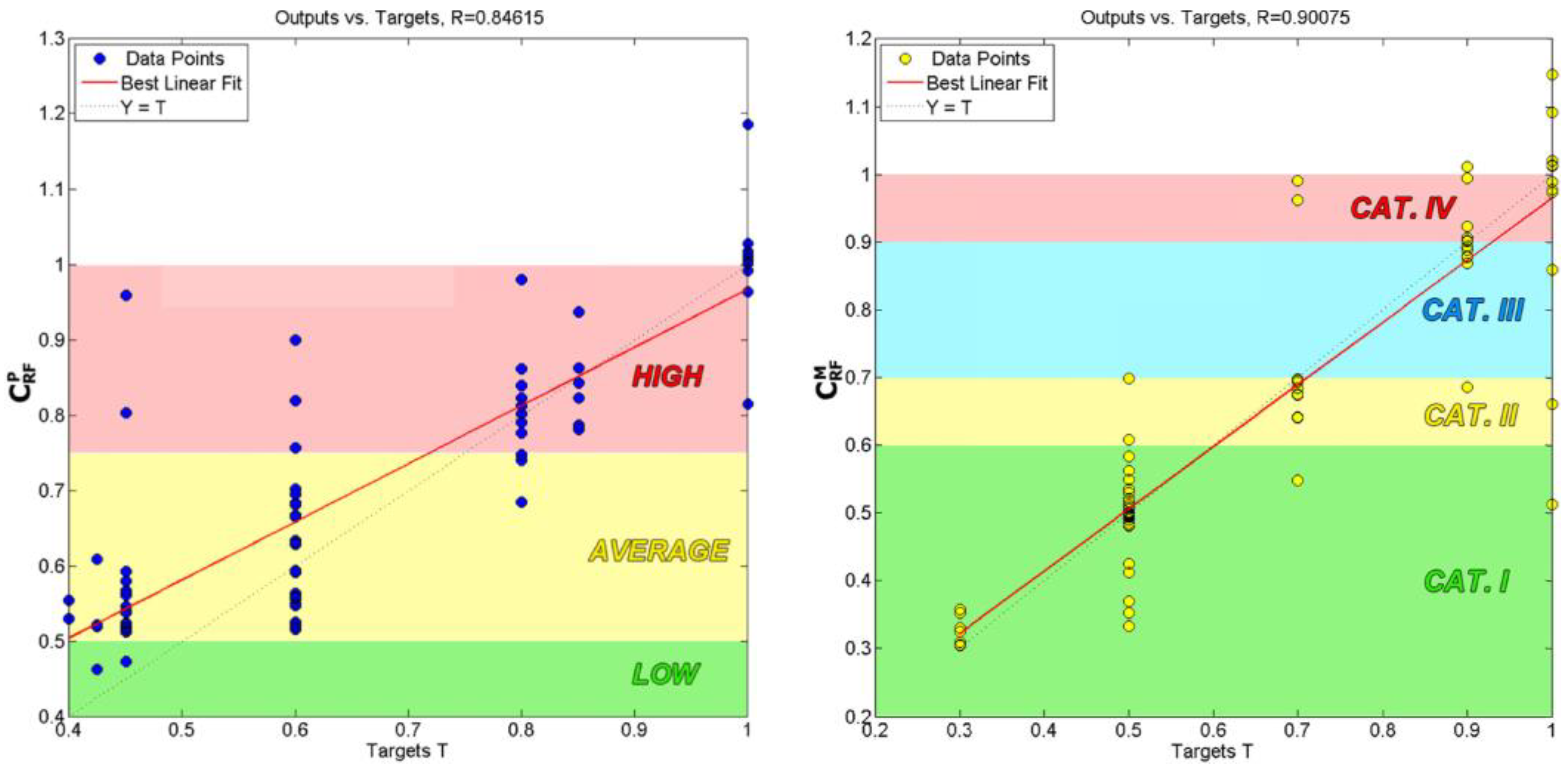
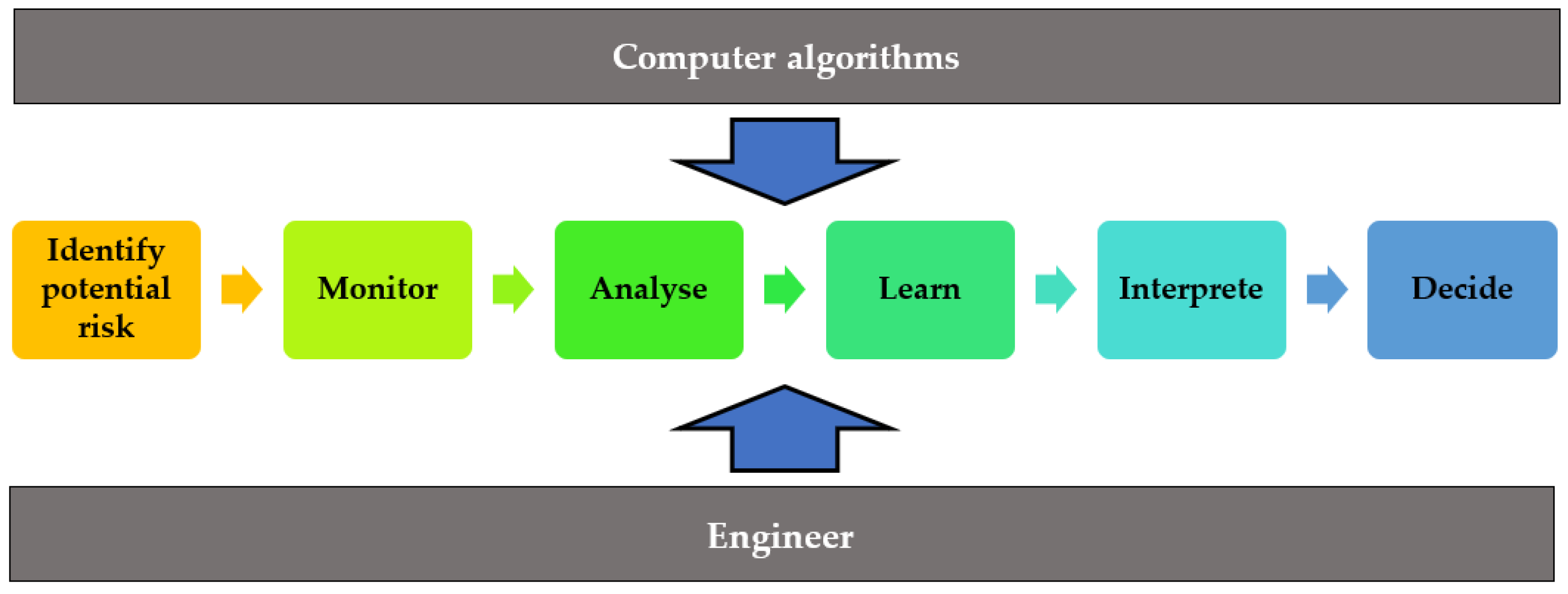
4.2. Machine Learning and Artificial Neural Networks
5. Innovative Solutions under Development
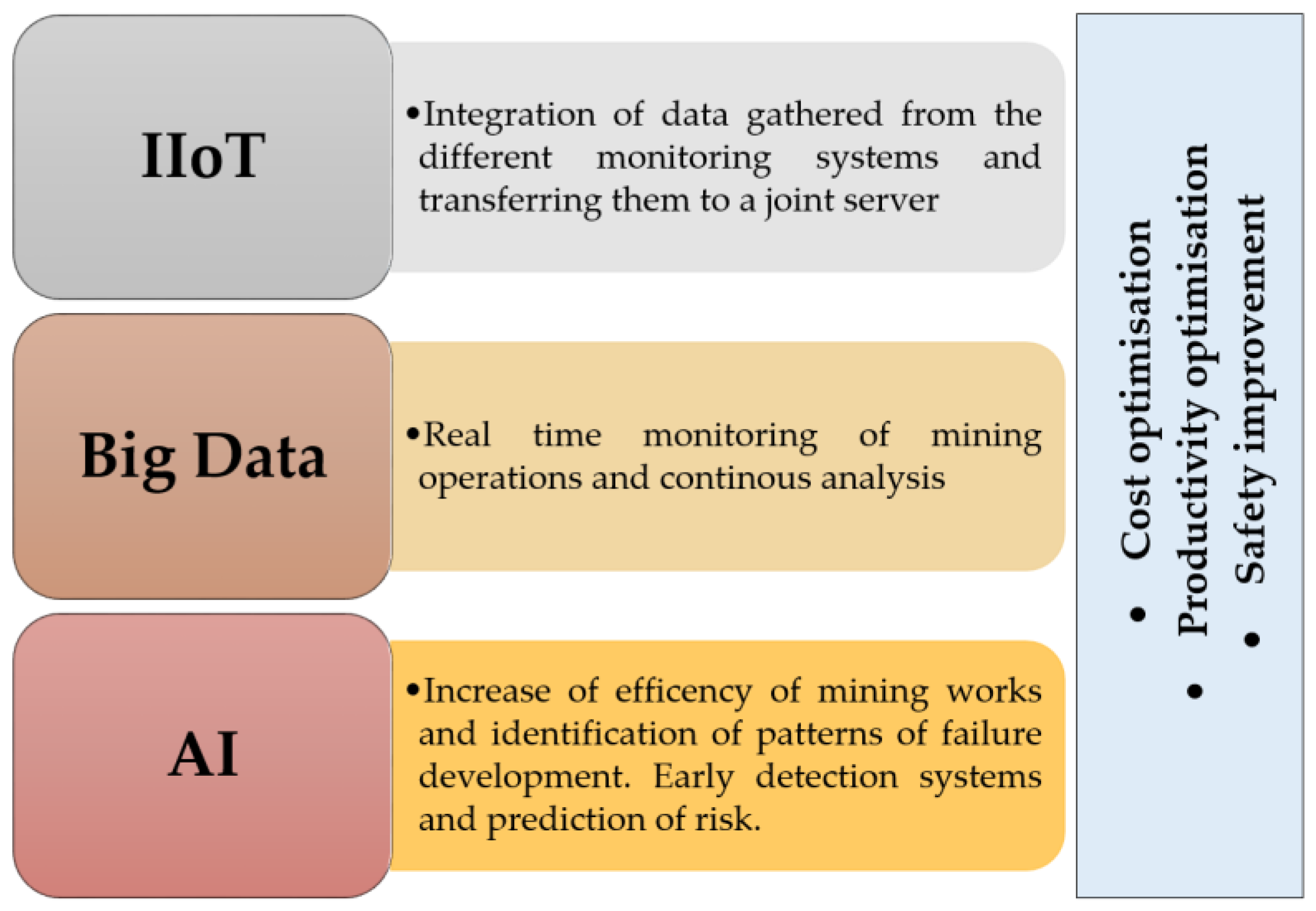
5.1. IoT in the Mining Industry
5.2. Novel Cost-Effective Solutions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Prusek, S.; Rajwa, S.; Wrana, A.; Krzemień, A. Assessment of Roof Fall Risk in Longwall Coal Mines. Int. J. Min. Reclam. Environ. 2017, 31, 558–574. [Google Scholar] [CrossRef] [Green Version]
- Martyka, J.; Hetmańczyk, P. Annual Report: The State of Natural and Technical Hazards in Polish Hard Coal Mines in 2013; Report under Prof. Kabiesz Lidership; GIG: Katowice, Poland, 2013; pp. 15–27. (In Polish) [Google Scholar]
- Biliński, A. The Symptoms of Rock Mass Pressure in Longwall Panels Located in Hard Coal Seams; Zeszyt Naukowy nr 221, Górnictwo z.31; Politechnika Śląska: Gliwice, Poland, 1968. (In Polish) [Google Scholar]
- Rajwa, S.; Płonka, M.; Lubosik, Z.; Walentek, A.; Masny, W. Principles of safe use of powered supports. In Proceedings of the School of Underground Mining, Ukraina, Jałta, 5–12 October 2008. [Google Scholar]
- Duzgun, H.S.B.; Einstein, H.H. Assessment and Management of Roof Fall Risks in Underground Coal Mines. Saf. Sci. 2004, 42, 23–41. [Google Scholar] [CrossRef]
- Gregory, M.; Christopher, M.; Debasis, D. Using the coal mine roof rating (CMRR) to assess roof stability in US coal mines, Mining industry annual review. J. Mines Met. Fuels 2001, 15, 314–321. [Google Scholar]
- Mark, C.; Pappas, D.M.; Barczak, T.M. Current trends in reducing groundfall accidents in US coal mines. Min. Eng. 2011, 63, 60–66. [Google Scholar]
- Evans, R.; Brereton, D.; Joy, J. Risk assessment as a tool to explore sustainable development issues; lessons from the Australian coal industry. Int. J. Risk Assess. Manag. 2007, 7, 607–619. [Google Scholar] [CrossRef]
- Wu, W.D.; Bai, J.B.; Feng, G.R.; Wang, X.Y. Investigation on the mechanism and control methods for roof collapse caused by cable bolt shear rupture. J. Eng. Fail. Anal. 2021, 130, 105724. [Google Scholar] [CrossRef]
- Lyu, H.M.; Sun, W.J.; Shen, S.L.; Zhou, A. Risk assessment using a new consulting process in fuzzy AHP. J. Constr. Eng. Manag. 2020, 146, 04019112. [Google Scholar] [CrossRef]
- Song, G.; Wang, Z.; Ding, K. Evaluation of the face advance rate on ground control in the open face area associated with mining operations in Western China. J. Geophys. Eng. 2020, 17, 390–398. [Google Scholar] [CrossRef]
- Wang, Y.-J.; Zhao, L.-S.; Xu, Y.-S. Analysis of Characteristics of Roof Fall Collapse of Coal Mine in Qinghai Province, China. Appl. Sci. 2022, 12, 1184. [Google Scholar] [CrossRef]
- Merwe, J.N.; Vuuren, J.J.; Butcher, R.; Canbulat, I. Causes of Falls of Roof in South African Collieries; Report of Safety in Mines Research Advisory Committee; Mine Health and Safety Council: Sandton, South Africa, 2001.
- Engelbrecht, J.; Theron, A.; Haupt, S. Evidence of roof collapse detected on South African coal mines using sentinel-1 interferometry. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5682–5684. [Google Scholar] [CrossRef]
- Düzgün, H.S.B. Analysis of roof fall hazards and risk assessment for Zonguldak coal basin underground mines. Int. J. Coal Geol. 2005, 64, 104–115. [Google Scholar] [CrossRef]
- Palei, S.K.; Das, S.K. Logistic regression model for prediction of roof fall risks in bord and pillar workings in coal mines: An approach. Saf. Sci. 2009, 47, 88–96. [Google Scholar] [CrossRef]
- Brady, T.; Martin, L.; Pakalnis, R. Empirical Approaches for Opening Design in Weak Rock Masses. Min. Technol. 2005, 114, 13–20. [Google Scholar] [CrossRef]
- Iannacchione, A.; Prosser, L.; Esterhuizen, G.; Bajpayee, T. Methods for Determining Roof Fall Risk in Underground Mines. 2004. Available online: https://www.cdc.gov (accessed on 17 October 2022).
- Iannacchione, A.T.; Esterhuizen, G.; Schilling, S.; Goodwin, T. Field Verification of the Roof Fall Risk Index: A Method to Assess Strata Conditions. In Proceedings of the 25th International Conference on Ground Control in Mining, Morgantown, WV, USA, 1–3 August 2006. [Google Scholar]
- Molinda, G.; Mark, C. Ground failures in coal mines with weak roof. Electron. J. Geotech. Eng. 2010, 15, 547–588. [Google Scholar]
- Fuławka, K.; Mertuszka, P.; Pytel, W. Monitoring of the Stability of Underground Workings in Polish Copper Mines Conditions. E3S Web Conf. 2018, 29, 8. [Google Scholar] [CrossRef] [Green Version]
- Isleyen, E.; Duzgun, S.; McKell Carter, R. Interpretable Deep Learning for Roof Fall Hazard Detection in Underground Mines. J. Rock Mech. Geotech. Eng. 2021, 13, 1246–1255. [Google Scholar] [CrossRef]
- Pappas, D.M.; Mark, C. Roof and rib fall incident trends: A 10-year profile. Trans. Soc. Min. Metall. Explor. 2012, 330, 462–478. [Google Scholar]
- Małkowski, P.; Juszyński, D. Roof Fall Hazard Assessment with the Use of Artificial Neural Network. Int. J. Rock Mech. Min. Sci. 2021, 143, 104701. [Google Scholar] [CrossRef]
- Kudełko, J. Structurization of mining companies. Gospod. Surowcami Miner. 2016, 32, 157–180. [Google Scholar] [CrossRef] [Green Version]
- Fuławka, K.; Pytel, W.; Mertuszka, P. The Effect of Selected Rockburst Prevention Measures on Seismic Activity—Case Study from the Rudna Copper Mine. J. Sustain. Min. 2021, 17, 1–10. [Google Scholar] [CrossRef]
- Mine Safety and Health Administration (MSHA). 2006. Available online: http://www.msha.gov/Stats/Part50/Yearly%20IR’s/Coal%20IR%20Publication-2006.pdf (accessed on 17 October 2022).
- State Mining Authority. 2022. Available online: https://www.wug.gov.pl (accessed on 17 October 2022).
- Polish State Mining Authority. Work Safety Assessment, Mine Rescue and Common Security Related to the Mining and Geology Operations in 2021 (Comparison Since 2017). [Ocena Stanu Bezpieczeństwa Pracy, Ratownictwa Górniczego Oraz Bezpieczeństwa Powszechnego w Związku z Działalnością Górniczo-Geologiczną w Roku 2021 (Porównanie od Roku 2017)]. 2022. Available online: https://www.wug.gov.pl/bhp/stan_bhp_w_gornictwie#tresc (accessed on 18 October 2022). (In Polish)
- Smith, A.D. Mine Roof Condition and the Occurrence of Roof Falls in Coal Mines. Ohio J. Sci. 1984, 84, 133–138. [Google Scholar]
- Ghasemi, E.; Ataei, M.; Shahriar, K.; Sereshki, F.; Jalali, S.E.; Ramazanzadeh, A. Assessment of Roof Fall Risk during Retreat Mining in Room and Pillar Coal Mines. Int. J. Rock Mech. Min. Sci. 2012, 54, 80–89. [Google Scholar] [CrossRef]
- Molinda, G.M.; Mark, C.; Dolinar, D. Assessing coal mine roof stability through roof fall analysis. In Proceedings: New Technology for Coal Mine Roof Support; NIOSH Publication No. 9453; US Department of Health and Human Services, Centers for Disease Control and Prevention, National Institute for Occupational Safety and Health: Research Triangle Park, NC, USA, 2000; pp. 53–72. [Google Scholar]
- Szwedzicki, T. Rock Mass Behaviour Prior to Failure. Int. J. Rock Mech. Min. Sci. 2003, 40, 573–584. [Google Scholar] [CrossRef]
- Dawn, T. Technologies of Ground Support Monitoring in Block Caving Operations; Ground Support; Hadjigeorgiou, J., Hudyma, M., Eds.; Australian Centre for Geomechanics: Perth, Australia, 2019. [Google Scholar] [CrossRef] [Green Version]
- Niu, G.; Zhang, K.; Yu, B.; Chen, Y.; Wu, Y.-S.; Liu, J.F. Experimental Study on Comprehensive Real-Time Methods to Determine Geological Condition of Rock Mass along the Boreholes while Drilling in Underground Coal Mines. Shock. Vib. 2019, 2019, 1045929. [Google Scholar] [CrossRef]
- Małkowski, P.; Niedbalski, Z.; Majcherczyk, T. Endoscopic method of rock mass quality evaluation—New experiences. In Proceedings of the 42nd U.S. Rock Mechanics—2nd U.S.-Canada Rock Mechanics Symposium, San Francisco, CA, USA, 29 June–2 July 2008. [Google Scholar]
- Lubosik, Z.; Waclawik, P.; Horak, P.; Wrana, A. The Influence of In-Situ Rock Mass Stress Conditions on Deformation and Load of Gateroad Supports in Hard Coal Mine. Procedia Eng. 2017, 191, 975–983. [Google Scholar] [CrossRef]
- Pavičić, I.; Galić, I.; Kucelj, M.; Dragičević, I. Fracture System and Rock-Mass Characterization by Borehole Camera Surveying: Application in Dimension Stone Investigations in Geologically Complex Structures. Appl. Sci. 2021, 11, 764. [Google Scholar] [CrossRef]
- Madziarz, M. Improvements in Methods for Monitoring Anchor Casings in Mining Excavations of KGHM Polska Miedź S.A. Mines. Min. Sci. 2015, 22, 115–125. [Google Scholar] [CrossRef]
- Song, G.; Li, W.; Wang, B.; Ho, S.C.M. A Review of Rock Bolt Monitoring Using Smart Sensors. Sensors 2017, 17, 776. [Google Scholar] [CrossRef] [Green Version]
- Dong, J.; Xie, Z.; Zheng, G.; Gao, K. Monitoring rock bolt safety based on FBG sensors. AIP Adv. 2022, 12, 025305. [Google Scholar] [CrossRef]
- Skrzypkowski, K. Case Studies of Rock Bolt Support Loads and Rock Mass Monitoring for the Room and Pillar Method in the Legnica-Głogów Copper District in Poland. Energies 2020, 13, 2998. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, K.T.; Kruger, S.E.; Levesque, D.; Gagnon, D.; Quenneville, Y.; Lacroix, R.; Royer, R. A new paradigm in ground support monitoring through ultrasonic monitoring of clusters of rockbolts. In Ground Support 2019: Proceedings of the Ninth International Symposium on Ground Support in Mining and Underground Construction; Hadjigeorgiou, J., Hudyma, M., Eds.; Australian Centre for Geomechanics: Perth, Australia, 2019; pp. 75–84. [Google Scholar] [CrossRef]
- Singh, P.; Jang, H.; Spearing, A.J.S.S. Improving the Numerical Modelling of In-Situ Rock Bolts Using Axial and Bending Strain Data from Instrumented Bolts. Geotech. Geol. Eng. 2022, 40, 2631–2655. [Google Scholar] [CrossRef]
- Mitri, H. Design and Development of a New Rockbolt Load Measuring Device; Report, R-308; Institut de Recherche Robert-Sauvé en Santé et en Sécurité du Travail: Montreal, QC, Canada, 2002. [Google Scholar]
- Wei, H.; Zhao, X.; Li, D.; Zhang, P.; Sun, C. Corrosion Monitoring of Rock Bolt by Using a Low Coherent Fiber-Optic Interferometry. Opt. Laser Technol. 2015, 67, 137–142. [Google Scholar] [CrossRef]
- Clero, K.; Ed-Diny, S.; Soror, T.; Rziki, S.; Achalhi, M.; El Fkihi, S.; Boanarijesy, A. A Review of Geotechnical Instabilities Identification and Monitoring at Deep Underground Mines, Case of Draa Sfar Mine in Morocco. Int. J. Civ. Infrastruct. 2022, 5, 51–59. [Google Scholar] [CrossRef]
- Nourizadeh, H.; Mirzaghorbanali, A.; Aziz, N.; McDougall, K.; Sahebi, A.A. Development of a Wireless System to Measure the strain/Deformation of Rock Bolts; Resource Operators Conference; University of Wollongong: Wollongong, Australia, 2022; Available online: https://ro.uow.edu.au/coal/853/ (accessed on 18 October 2022).
- Mai, W.; Janiszewski, M.; Uotinen, L.; Mishra, R.; Rinne, M. Monitoring of rock stress change using instrumented rebar rock bolts. In IOP Conference Series: Earth and Environmental Science, Proceedings of the Mechanics and Rock Engineering, from Theory to Practice, Turin, Italy, 20–25 September 2021; IOP Publishing: Bristol, UK, 2021; Volume 833, Available online: https://iopscience.iop.org/article/10.1088/1755-1315/833/1/012141/meta (accessed on 18 October 2022).
- Waclawik, P.; Snuparek, R.; Kukutsch, R. Rock Bolting at the Room and Pillar Method at Great Depths. Procedia Eng. 2017, 191, 575–582. [Google Scholar] [CrossRef]
- Spearing, A.; Hyett, A.J.; Kostecki, T.; Gadde, M. New technology for measuring the in situ performance of rock bolts. Int. J. Rock Mech. Min. Sci. 2013, 57, 153–166. [Google Scholar] [CrossRef]
- Spearing, A.; Hyett, A.J. In situ monitoring of primary roofbolts at underground coal mines in the USA. J. S. Afr. Inst. Min. Metall. 2014, 114, 791–800. [Google Scholar]
- Mitri, H. Evaluation of Rock Support Performance through Instrumentation and Monitoring of Bolt Axial Load. In Coal Operators’ Conference; University of Wollongong: Kowloon City, Hong Kong, 2011; Available online: https://ro.uow.edu.au/coal/349 (accessed on 19 October 2022).
- Liu, Q.; Chai, J.; Chen, S.; Zhang, D.; Yuan, Q.; Wang, S. Monitoring and correction of the stress in an anchor bolt based on Pulse Pre-Pumped Brillouin Optical Time Domain Analysis. Energy Sci. Eng. 2020, 8, 2011–2023. [Google Scholar] [CrossRef] [Green Version]
- Gong, H.; Kizil, M.S.; Chen, Z.; Amanzadeh, M.; Yang, B.; Aminossadati, S.M. Advances in fibre optic based geotechnical monitoring systems for underground excavations. Int. J. Min. Sci. Technol. 2019, 29, 229–238. [Google Scholar] [CrossRef]
- Forbes, B.; Vlachopoulos, N.; Hyett, A.J. The application of distributed optical strain sensing to measure the strain distribution of ground support members. FACETS 2018, 3, 195–226. [Google Scholar] [CrossRef] [Green Version]
- Hyett, A.J.; Forbes, B.; Spearing, S. Enlightening Bolts: Using Distributed Optical Sensing to Measure the Strain Profile along Fully Grouted Rock Bolts. In Proceedings of the 32nd International Conference on Ground Control in Mining, Morgantown, WV, USA, 30 July–1 August 2013. [Google Scholar]
- Valley, B.; Madjdabadi, B.; Kaiser, P.; Dusseault, M. Monitoring mining-induced rock mass deformation using distributed strain monitoring based on fiber optics. In Proceedings of the ISRM International Symposium—EUROCK 2012, Stockholm, Sweden, 28–30 May 2012. [Google Scholar]
- Lai, J.; Qiu, J.; Fan, H.; Zhang, Q.; Hu, Z.; Wang, J.; Chen, J. Fiber Bragg Grating Sensors-Based In Situ Monitoring and Safety Assessment of Loess Tunnel. J. Sens. 2016, 2016, 10. [Google Scholar] [CrossRef] [Green Version]
- Forbes, B.; Vlachopoulos, N.; Diederichs, M.S.; Hyett, A.J.; Punkkinen, A. An in situ monitoring campaign of a hard rock pillar at great depth within a Canadian mine. J. Rock Mech. Geotech. Eng. 2020, 12, 427–448. [Google Scholar] [CrossRef]
- Szczerbowski, Z.; Niedbalski, Z. The Application of a Sonic Probe Extensometer for the Detection of Rock Salt Flow Field in Underground Convergence Monitoring. Sensors 2021, 21, 5562. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://www.encardio.com/blog/extensometer-types-how-it-works-applications/ (accessed on 19 October 2022).
- Gruchlik, P.; Kowalski, A. Application of new measurement technology for deformation study of structures in mining areas. E3S Web Conf. 2018, 55, 8. [Google Scholar] [CrossRef]
- Prasad, R.K.; Dixit, M. Performance Monitoring of Underground Structure by Extensometer—A Case Study. Int. J. Eng. Appl. Sci. 2021, 8, 1–6. [Google Scholar]
- Kumar, A.; Kumar-Singh, A.; Ram, S.; Singh, A.; Singh, R. Practical experiences of instrumentation and monitoring for depillaring. In Recent Advances in Rock Engineering (RARE 2016); Atlantis Press: Paris, France, 2016. [Google Scholar] [CrossRef]
- Stolecki, L.; Grzebyk, W. The Velocity of Roof Deflection as an Indicator of Underground Workings Stability—Case Study from Polish Deep Copper Mines. Int. J. Rock Mech. Min. Sci. 2021, 143, 104717. [Google Scholar] [CrossRef]
- Ryan, T.M.; Call, R.D. Applications of rock mass monitoring for stability assessment of pit slope failure. In Proceedings of the 33th U.S. Symposium on Rock Mechanics (USRMS), Santa Fe, NM, USA, 3–5 June 1992; pp. 221–229. [Google Scholar]
- Carla, T.; Intrieri, E.; Farina, P.; Casagli, N. A new method to identify impending failure in rock slopes. Int. J. Rock Mech. Min. Sci. 2017, 93, 76–78. [Google Scholar] [CrossRef]
- Cecchetti, M.; Rossi, M.; Coppi, F.; Bicci, A.; Coli, N.; Boldrini, N.; Preston, C. A Novel Radar-Based System for Underground Mine Wall Stability Monitoring. In Underground Mining Technology 2017; Hudyma, M., Potvin, Y., Eds.; Australian Centre for Geomechanics: Perth, Australia, 2017; pp. 431–443. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, S.; Gagnon, J.; Naeem, R.; Wang, J. New methods and equipment for three-dimensional laser scanning, mapping and profiling underground mine cavities. In Underground Mining Technology 2017; Hudyma, M., Potvin, Y., Eds.; Australian Centre for Geomechanics: Perth, Australia, 2017; pp. 467–473. [Google Scholar] [CrossRef] [Green Version]
- Janus, J.; Ostrogórski, P. Underground Mine Tunnel Modelling Using Laser Scan Data in Relation to Manual Geometry Measurements. Energies 2022, 15, 2537. [Google Scholar] [CrossRef]
- Gurgel, M.J.M.; Preusse, A. New opportunities and challenges in surveying underground cavities using photogrammetric methods. Int. J. Min. Sci. Technol. 2021, 31, 9–13. [Google Scholar] [CrossRef]
- Guo, J.; Zong, X.; Xie, X.; Wang, L.; Zhai, J. Deformation monitoring of noncircular tunnels based on 3D laser scanning. IOP Conf. Ser. Earth Environ. Sci. 2020, 570, 042003. [Google Scholar] [CrossRef]
- Singh, S.K.; Banerjee, B.P.; Raval, S. Three-Dimensional Unique-Identifier-Based Automated Georeferencing and Coregistration of Point Clouds in Underground Mines. Remote Sens. 2021, 13, 3145. [Google Scholar] [CrossRef]
- Monsalve, J.J.; Baggett, J.; Bishop, R.; Ripepi, N. Application of laser scanning for rock mass characterization and discrete fracture network generation in an underground limestone mine. Int. J. Min. Sci. Technol. 2019, 29, 131–137. [Google Scholar] [CrossRef]
- Kajzar, V.; Kukutsch, R.; Heroldová, N. Verifying the possibilities of using a 3D laser scanner in the mining underground. Acta Geodyn. Geomater. 2015, 12, 1–8. [Google Scholar] [CrossRef]
- Barla, G. Applications of Numerical Methods in Tunnelling and Underground Excavations: Recent Trends. In Proceedings of the ISRM International Symposium—EUROCK 2016, Ürgüp, Turkey, 29–31 August 2016. [Google Scholar]
- Blachowski, J.; Milczarek, W.; Stefaniak, P. Deformation Information System for Facilitating Studies of Mining-Ground Deformations, Development, and Applications. Nat. Hazards Earth Syst. Sci. 2014, 14, 1677–1689. [Google Scholar] [CrossRef] [Green Version]
- Pytel, W. Roof fall hazard due to blasting activity in the light of numerical modeling and underground measurements. arXiv 2018, arXiv:1903.04230. [Google Scholar]
- Dhawan, K.R.; Singh, D.N.; Gupta, I.D. 2D and 3D Finite Element Analysis of Underground Openings in an Inhomogeneous Rock Mass. Int. J. Rock Mech. Min. Sci. 2002, 39, 217–227. [Google Scholar] [CrossRef]
- Agliardi, F.; Castellanza, R.; Frigerio, G.; Orlandi, G.M. Stability Modeling of Complex Underground Mine Openings Integrating Point Clouds and FEM 3D. IOP Conf. Ser. Earth Environ. Sci. 2021, 833, 012108. [Google Scholar] [CrossRef]
- Likitlersuang, S.; Surarak, C.; Wanatowski, D.; Oh, E.; Balasubramaniam, A. Finite Element Analysis of a Deep Excavation: A Case Study from the Bangkok MRT. Soils Found. 2013, 53, 756–773. [Google Scholar] [CrossRef] [Green Version]
- Chheng, C.; Likitlersuang, S. Underground Excavation Behaviour in Bangkok Using Three-Dimensional Finite Element Method. Comput. Geotech. 2018, 95, 68–81. [Google Scholar] [CrossRef]
- Ou, C.-Y. Finite element analysis of deep excavation problems. J. Geoengin. 2016, 11, 1–12. [Google Scholar]
- Lu, S.; Xu, M.; He, Z. FLAC3D numerical analysis on surrounding rock mass stability of the underground cavities. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 1561–1564. [Google Scholar] [CrossRef]
- Ma, S.; Huang, T.; Bao, X.; Wang, Z.; Zhang, H.; Liu, G. Deformation analysis of underground powerhouse of a large hydropower station based on FLAC3D. IOP Conf. Ser. Earth Environ. Sci. 2021, 632, 042033. [Google Scholar] [CrossRef]
- Sobótka, M.; Łydżba, D.; Różański, A. Shape Optimization of Underground Excavation By Simulated Annealing. Stud. Geotech. Mech. 2013, 35, 209–218. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Apel, D.B.; Xu, H.; Wei, C.; Skrzypkowski, K. Evaluation of the Effects of Yielding Rockbolts on Controlling Self-Initiated Strainbursts: A Numerical Study. Energies 2022, 15, 2574. [Google Scholar] [CrossRef]
- Cai, M.; Kaiser, P.K.; Morioka, H.; Minami, M.; Maejima, T.; Tasaka, Y.; Kurose, H. FLAC/PFC Coupled Numerical Simulation of AE in Large-Scale Underground Excavations. Int. J. Rock Mech. Min. Sci. 2007, 44, 550–564. [Google Scholar] [CrossRef]
- Huang, F.; Wang, Y.; Wen, Y.; Lin, Z.; Zhu, H. The Deformation and Failure Analysis of Rock Mass Around Tunnel by Coupling Finite Difference Method and Discrete Element Method. Indian Geotech. J. 2019, 49, 421–436. [Google Scholar] [CrossRef]
- Adoko, A.C.; Saadaari, F.; Mireku-Gyimah, D.; Imashev, A. A Feasibility Study on The Implementation of Neural Network Classifiers for Open Stope Design. Geotech. Geol. Eng. 2022, 40, 677–696. [Google Scholar] [CrossRef]
- Zhang, X.; Nguyen, H.; Bui, X.-N.; Anh Le, H.; Nguyen-Thoi, T.; Moayedi, H.; Mahesh, V. Evaluating and Predicting the Stability of Roadways in Tunnelling and Underground Space Using Artificial Neural Network-Based Particle Swarm Optimization. Tunn. Undergr. Space Technol. 2020, 103, 103517. [Google Scholar] [CrossRef]
- Mahdevari, S.; Shahriar, K.; Sharifzadeh, M.; Tannant, D.D. Stability Prediction of Gate Roadways in Longwall Mining Using Artificial Neural Networks. Neural Comput. Appl. 2017, 28, 3537–3555. [Google Scholar] [CrossRef]
- Rezaei, M.; Hossaini, M.F.; Majdi, A.; Najmoddini, I. Determination of the Height of Destressed Zone above the Mined Panel: An ANN Model. Int. J. Min. Geo. Eng. 2017, 51, 1–7. [Google Scholar] [CrossRef]
- Konaté, A.A.; Pan, H.; Fang, S.; Asim, S.; Ziggah, Y.Y.; Deng, C.; Khan, N. Capability of Self-Organizing Map Neural Network in Geophysical Log Data Classification: Case Study from the CCSD-MH. J. Appl. Geophys. 2015, 118, 37–46. [Google Scholar] [CrossRef]
- Amoako, R.; Jha, A.; Zhong, S. Rock Fragmentation Prediction Using an Artificial Neural Network and Support Vector Regression Hybrid Approach. Mining 2022, 2, 233–247. [Google Scholar] [CrossRef]
- Majdi, A.; Rezaei, M. Prediction of Unconfined Compressive Strength of Rock Surrounding a Roadway Using Artificial Neural Network. Neural Comput. Appl. 2013, 23, 381–389. [Google Scholar] [CrossRef]
- Wang, J.; Milne, D.; Pakalnis, R. Application of a Neural Network in the Empirical Design of Underground Excavation Spans. Min. Technol. 2002, 111, 73–81. [Google Scholar] [CrossRef]
- He, M.; Zhang, Z.; Li, N. Deep Convolutional Neural Network-Based Method for Strength Parameter Prediction of Jointed Rock Mass Using Drilling Logging Data. Int. J. Geomech. 2021, 21, 04021111. [Google Scholar] [CrossRef]
- Koperska, W.; Stachowiak, M.; Jachnik, B.; Stefaniak, P.; Bursa, B.; Stefanek, P. Machine Learning Methods in the Inclinometers Readings Anomaly Detection Issue on the Example of Tailings Storage Facility. In Artificial Intelligence for Knowledge Management; Mercier-Laurent, E., Kayalica, M.Ö., Owoc, M.L., Eds.; Springer International Publishing: Cham, Switzerland, 2021; Volume 614, pp. 235–249. ISBN1 9783030808464. ISBN2 9783030808471. [Google Scholar]
- Available online: https://www.infosysbpm.com/blogs/sourcing-procurement/iot-in-mining.html (accessed on 19 October 2022).
- Hoek, E.; Kaiser, P.K.; Bawden, W.P. Support of Underground Excavation in Hard Rock; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar]
- Li, C.C. Principles of Rockbolting Design. J. Rock Mech. Geotech. Eng. 2017, 9, 396–414. [Google Scholar] [CrossRef]
- Shapka-Fels, T.; Elmo, D. Numerical Modelling Challenges in Rock Engineering with Special Consideration of Open Pit to Underground Mine Interaction. Geosciences 2022, 12, 199. [Google Scholar] [CrossRef]
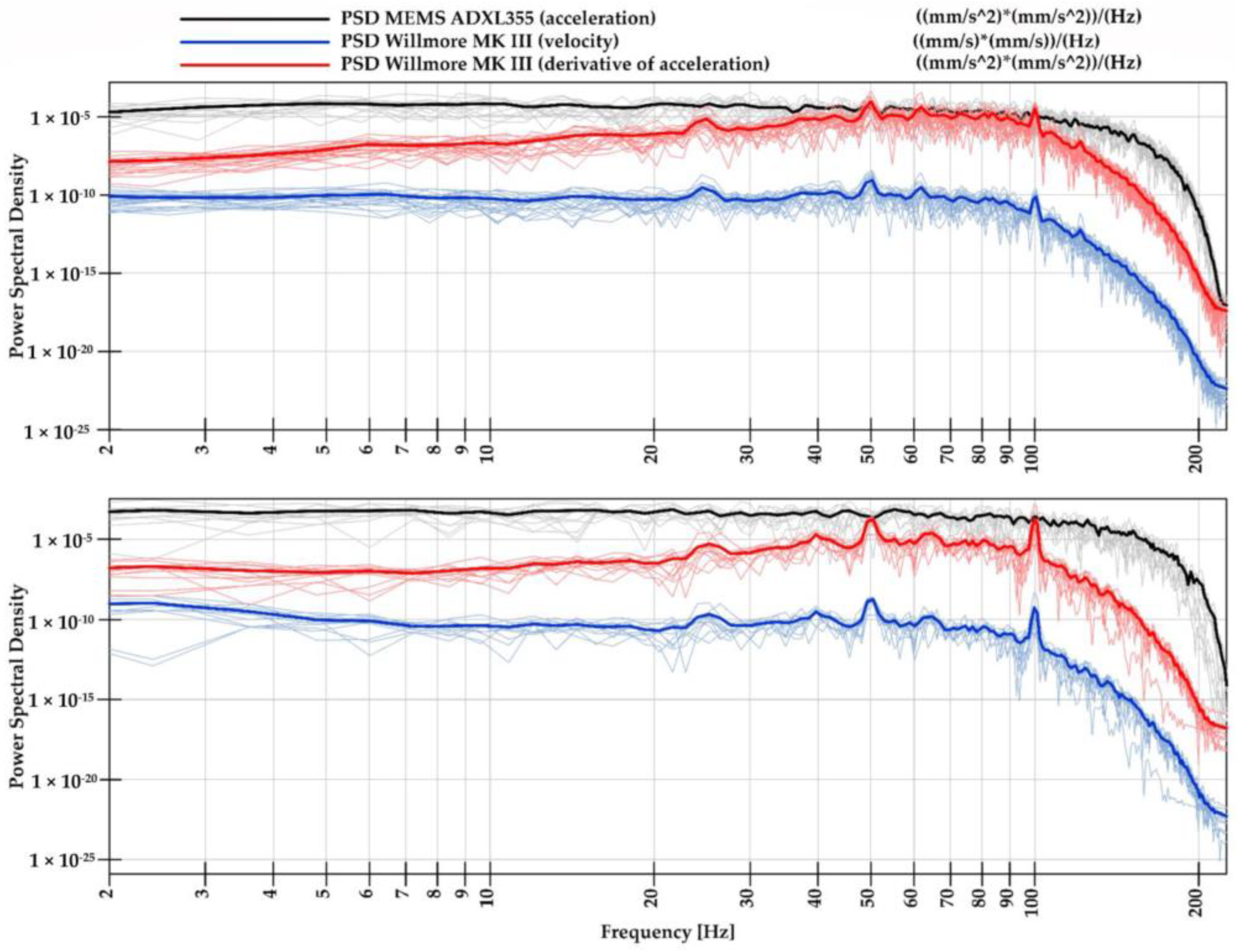
- Fuławka, K.; Mertuszka, P.; Szumny, M.; Stolecki, L.; Szczerbiński, K. Application of MEMS-Based Accelerometers for Near-Field Monitoring of Blasting-Induced Seismicity. Minerals 2022, 12, 533. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mining Company Name | Description | Benefits |
|---|---|---|
| Rio Tinto—Koodaideri iron ore project, Australia | Rio Tinto’s Kookaideri project in Australia is set to build the world’s first “intelligent mine” where all assets are networked together and are capable of making decisions in microseconds | Based on continuous monitoring the real-time decision are made what led to optimizing of production process |
| Hecla Mining Company—Casa Berardi mine, Canada | The mine introduced Newtrax’s Mobile Equipment Telemetry in order to better manage machine downtime. | Daily operation of machines’ time increased |
| Hindustan Zinc’s Sindesar Khurd (SK) mine, India | Newtrax MET integrated with the Sandvik OptiMine digital platform to track and receive data from the entire underground operation including drills, loaders, trucks, and other equipment. | The effectiveness of production process increased |
| Goldcorp—Porcupine Gold Mine’s Borden site, Canada | With a Ventilation on Demand system, Goldcorp can automatically adjust underground ventilation by controlling fans remotely through a centralized digital interface on the surface. | The operation’s electrical consumption was reduced by 50% what significantly reduced cost. |
| Glencore’s Matagami Zinc mine, Canada | Newtrax’s Mobile Equipment Telemetry provides mine operations with essential data from interconnected assets and equipment. | The average tonnage of ore hauled in each trip has risen by about 10%. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fuławka, K.; Stolecki, L.; Szumny, M.; Pytel, W.; Jaśkiewicz-Proć, I.; Jakić, M.; Nöger, M.; Hartlieb, P. Roof Fall Hazard Monitoring and Evaluation—State-of-the-Art Review. Energies 2022, 15, 8312. https://doi.org/10.3390/en15218312
Fuławka K, Stolecki L, Szumny M, Pytel W, Jaśkiewicz-Proć I, Jakić M, Nöger M, Hartlieb P. Roof Fall Hazard Monitoring and Evaluation—State-of-the-Art Review. Energies. 2022; 15(21):8312. https://doi.org/10.3390/en15218312
Chicago/Turabian StyleFuławka, Krzysztof, Lech Stolecki, Marcin Szumny, Witold Pytel, Izabela Jaśkiewicz-Proć, Michel Jakić, Michael Nöger, and Philipp Hartlieb. 2022. "Roof Fall Hazard Monitoring and Evaluation—State-of-the-Art Review" Energies 15, no. 21: 8312. https://doi.org/10.3390/en15218312