
Electric Vehicles Charging Algorithm with Peak Power Minimization, EVs Charging Power Minimization, Ability to Respond to DR Signals and V2G Functionality



Abstract
:1. Introduction
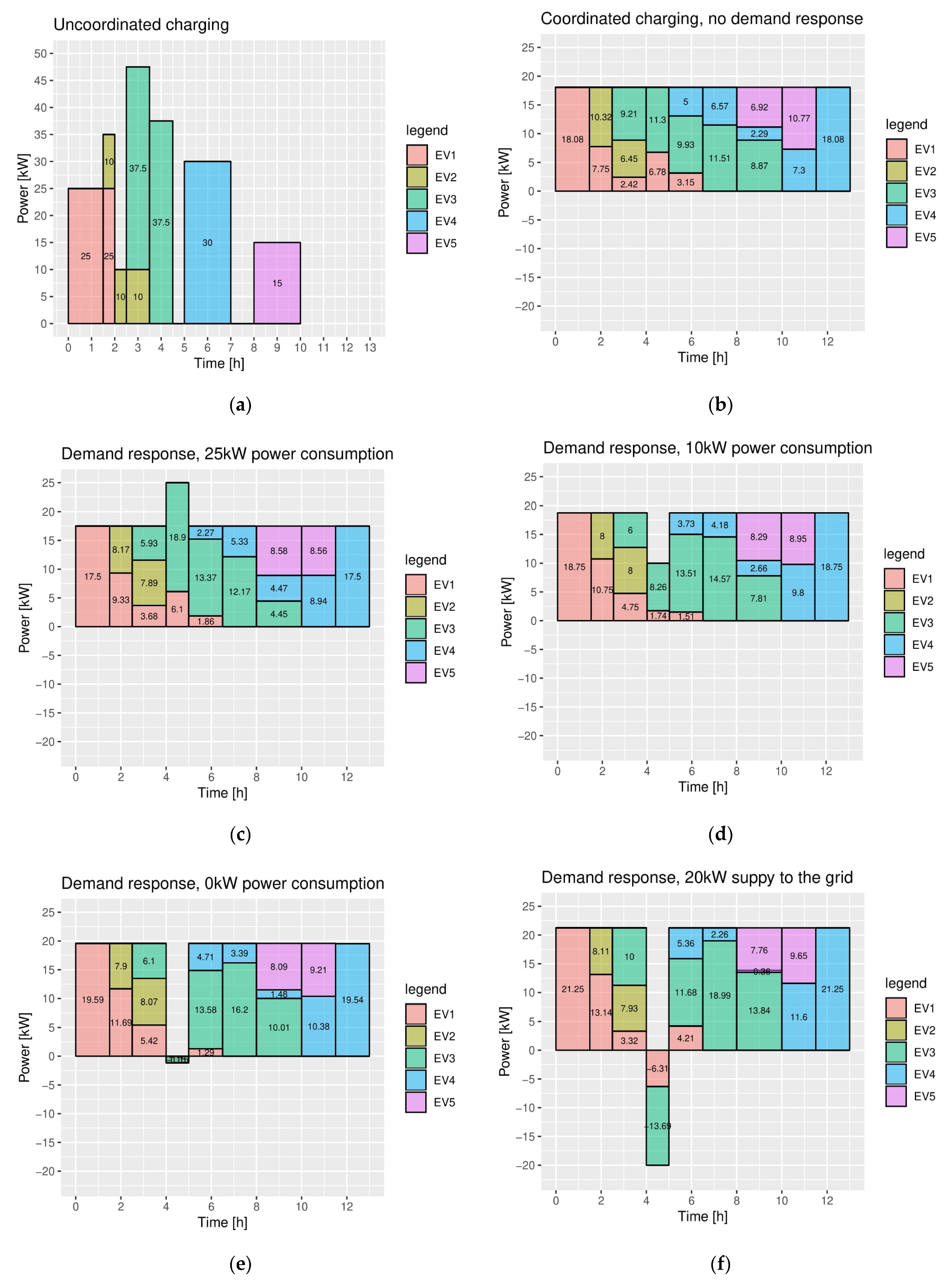
- Minimize the total power required by the EV parking lot;
- Lower demanded power, which then in turn reduces the strain on the powerlines. The algorithm’s demanded-power lowering potential is maximized by using two-directional energy flow to, from and between the connected vehicles (V2G);
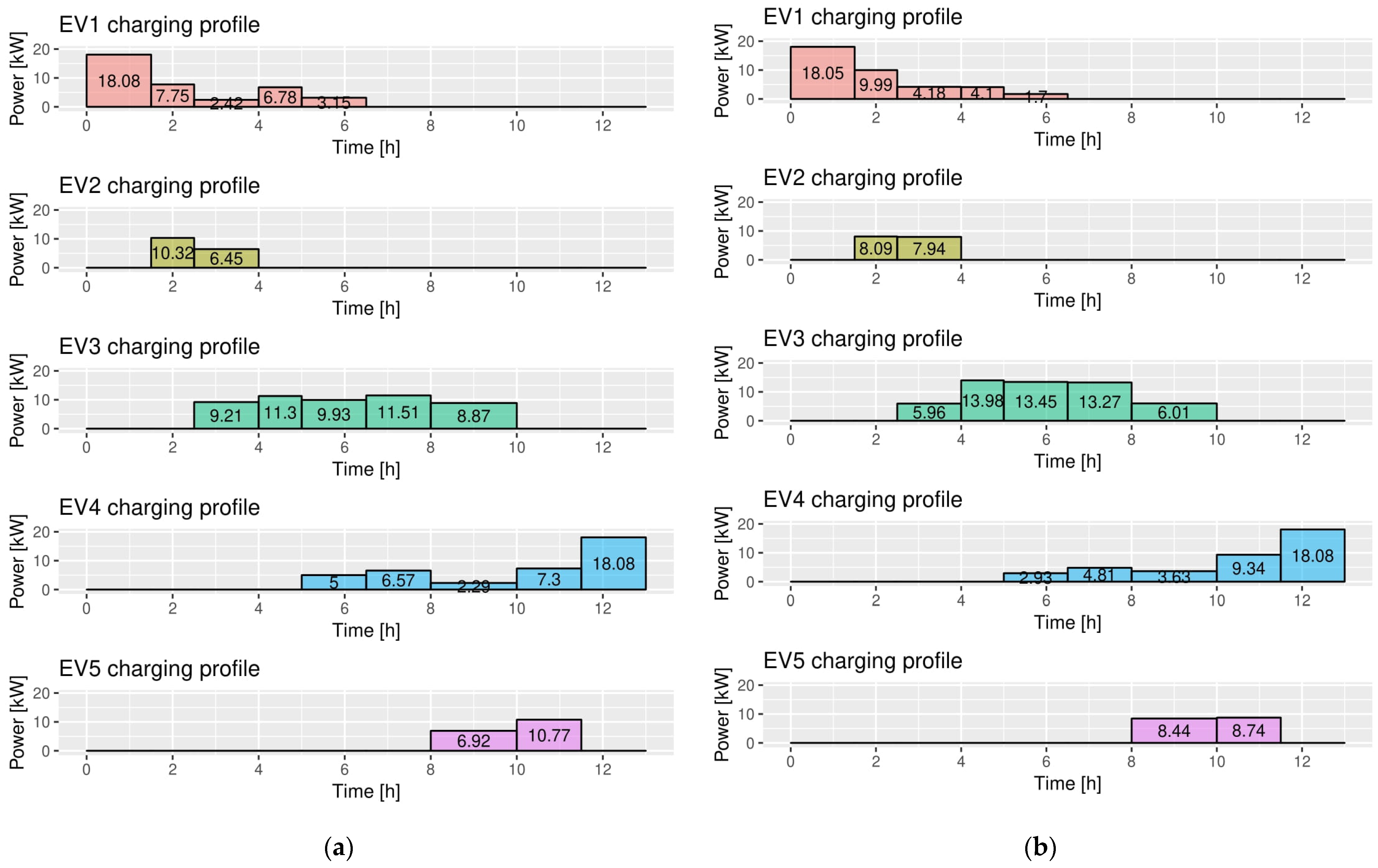
- Minimize the EV charging power, as well as minimize the charging profile variability to maximally extend the life of EV batteries;
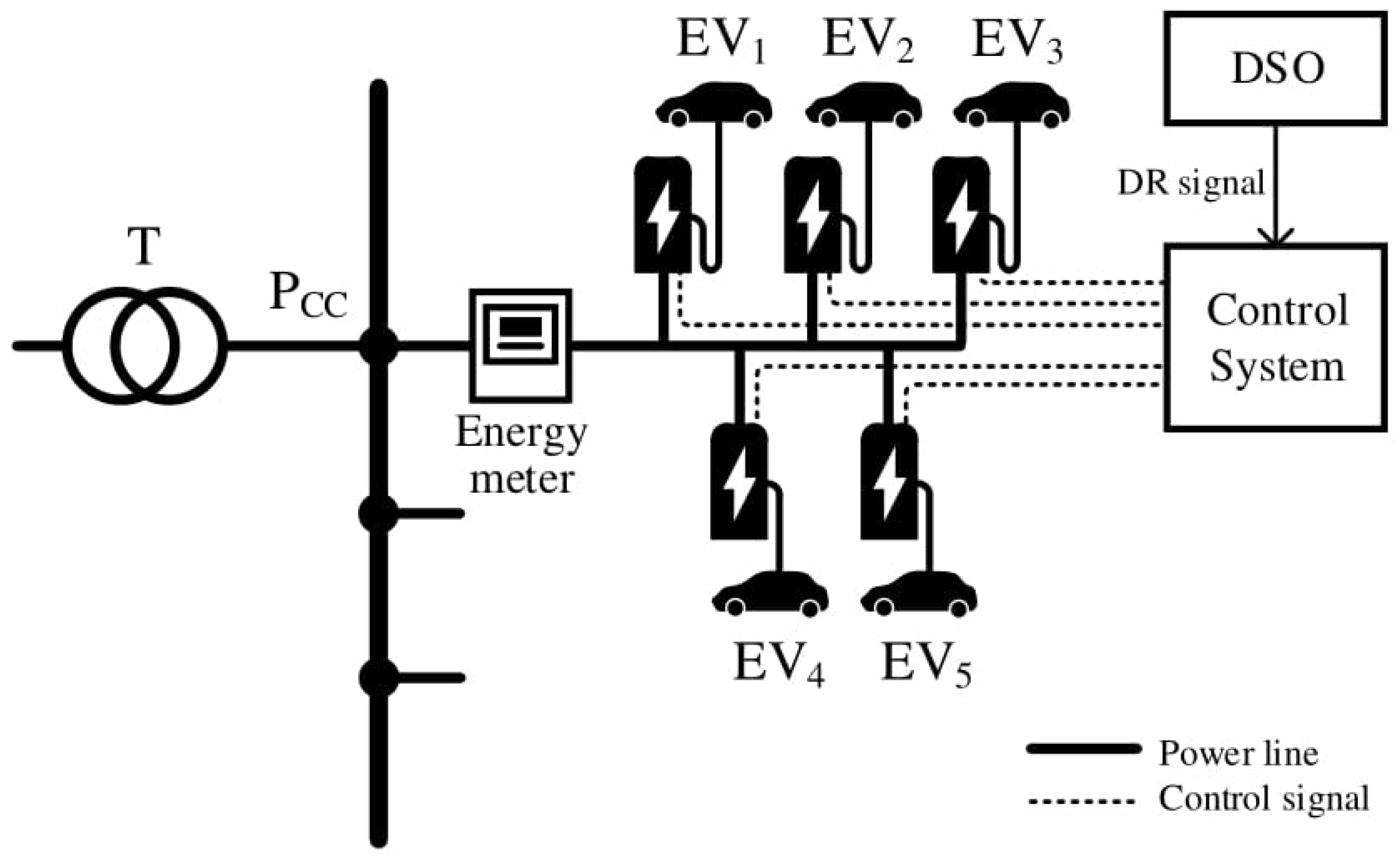
- Allow regulatory action, which can take the form of total load reduction or even power supply (V2G) in a certain time period based on DR signal;
- Ensure the satisfaction of every connected EV for charging needs at the user-specified departure time.
- These tasks are performer at the same time while:
- The algorithm prevents overcharging or overdischarging of every EV, prevents using higher charging power than the nominal and can be set to not discharge EVs below a specified SOC and to allow or disable V2G functionality based on the type of EV or client preferences.
2. Materials and Methods
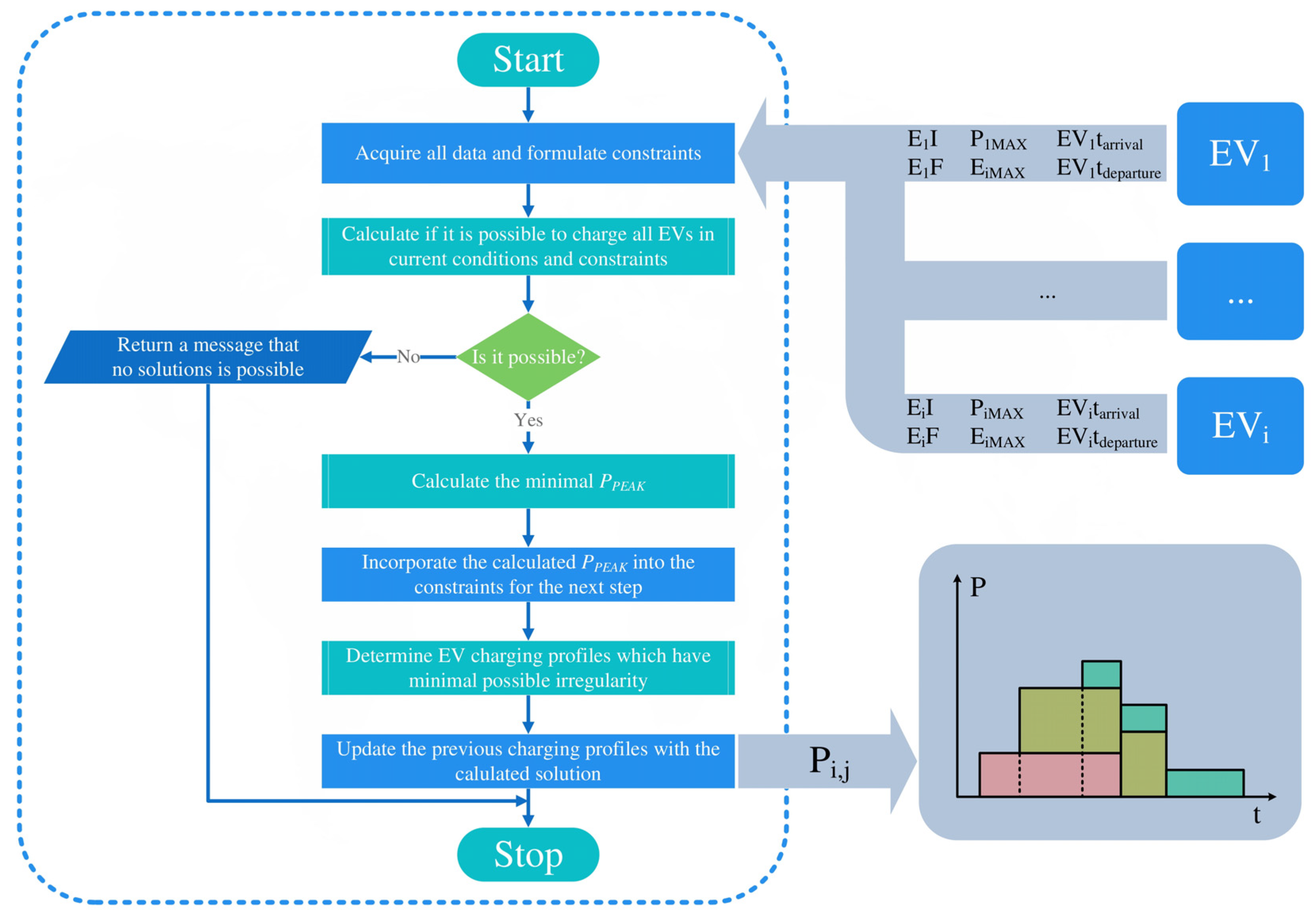
- To ensure that the exact amount of energy is fed to the batteries of individual EVs to charge them before their departure time:
- b.
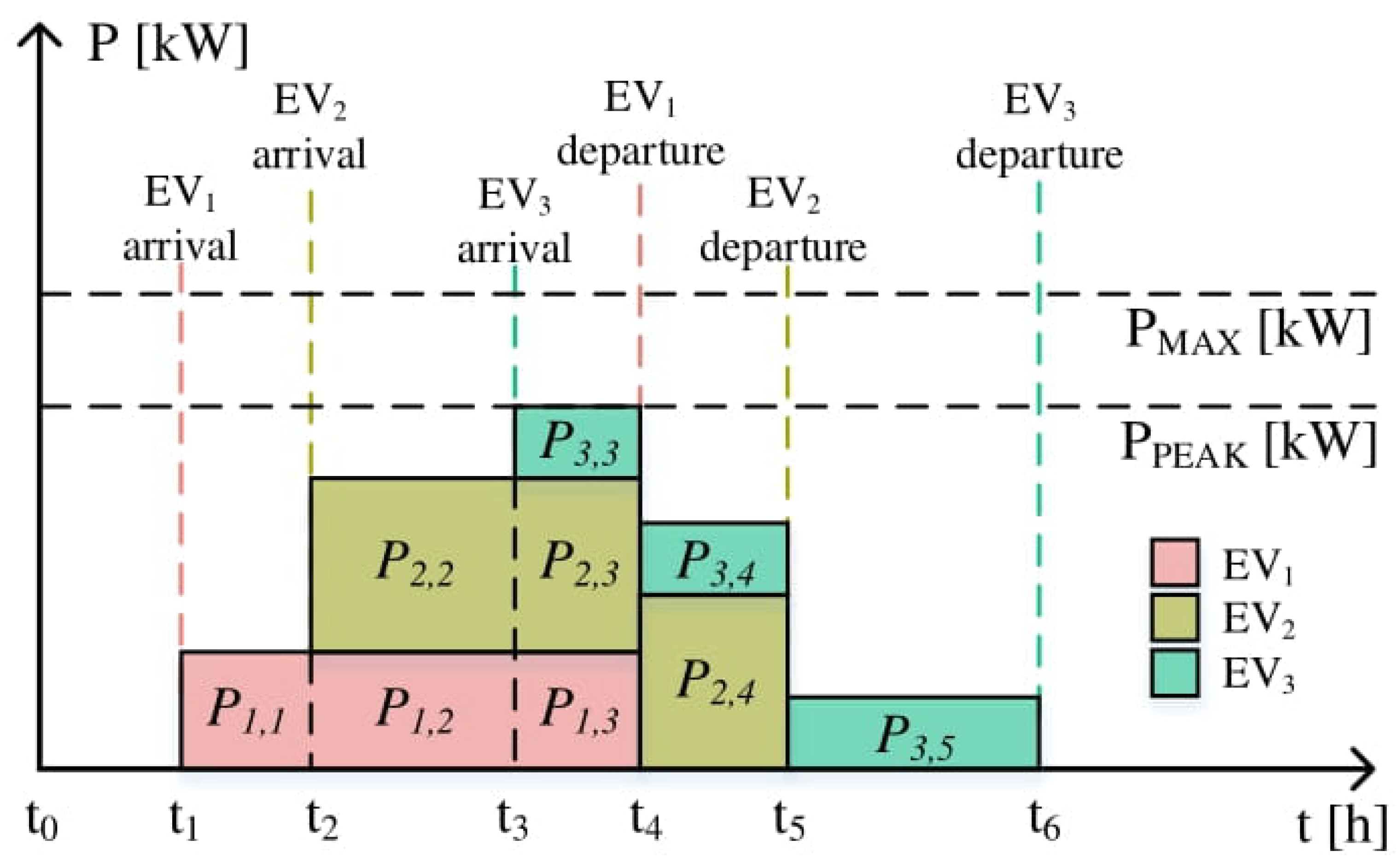
- To ensure that the total parking lot load does not exceed the demanded power PMAX during the charging process:
- c.
- To ensure that charging power of each individual EV Pi,j does not exceed its rated maximum charging/discharging power PiMAX during the whole charging process:
- d.
- To protect against excessive battery discharge (because negative values of Pi,j are permitted):
- Considered objective functions:
- Models:
- I.
- Minimize Fα,
- subject to: (a), (b), (c), (d) and β ≤ 1.
- II.
- Minimize Fβ,
- subject to: (a), (b), (c), (d) and α ≤ 1.
- III.
- Minimize FP,
- subject to: (a), (b), (c), (d) and α ≤ 1, β ≤ βOPT, where (βOPT = βMIN from model (II)).
3. Results and Discussion
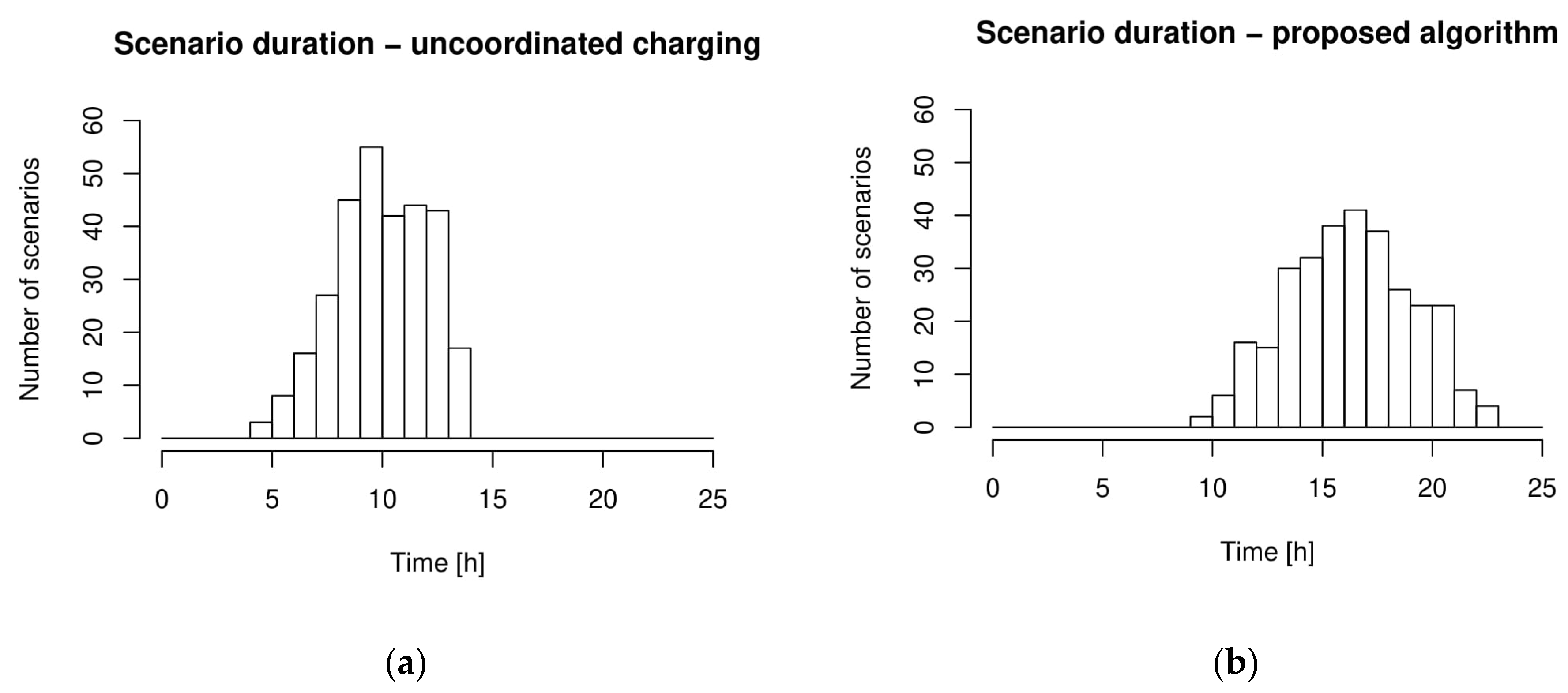
3.1. Random Scenario Generation
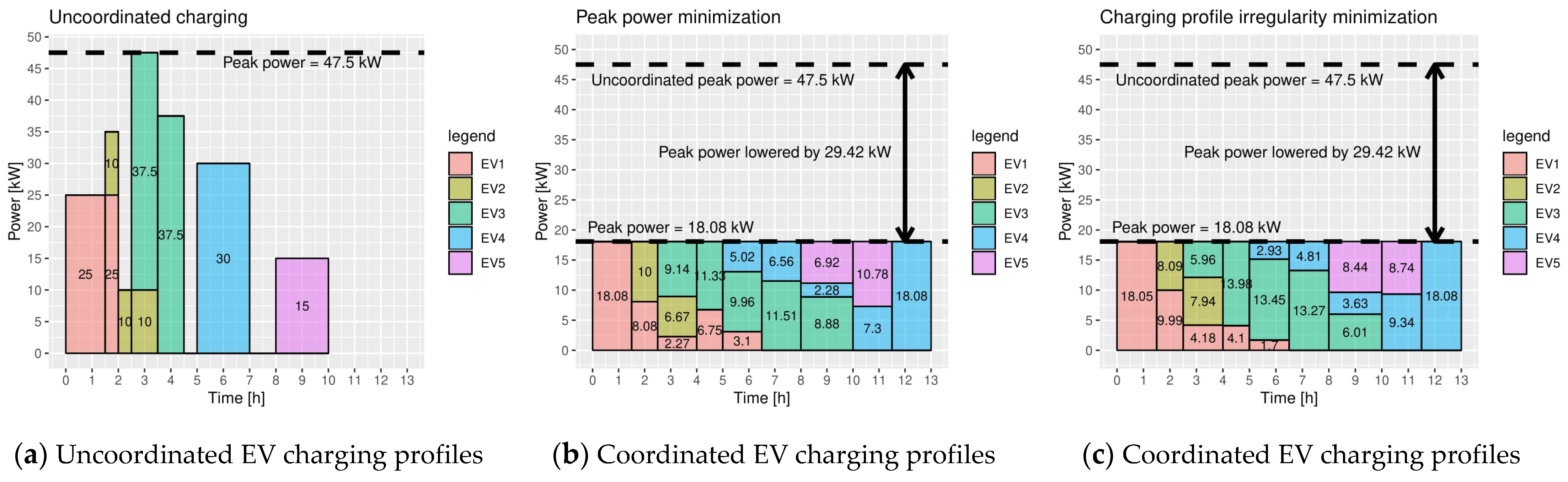
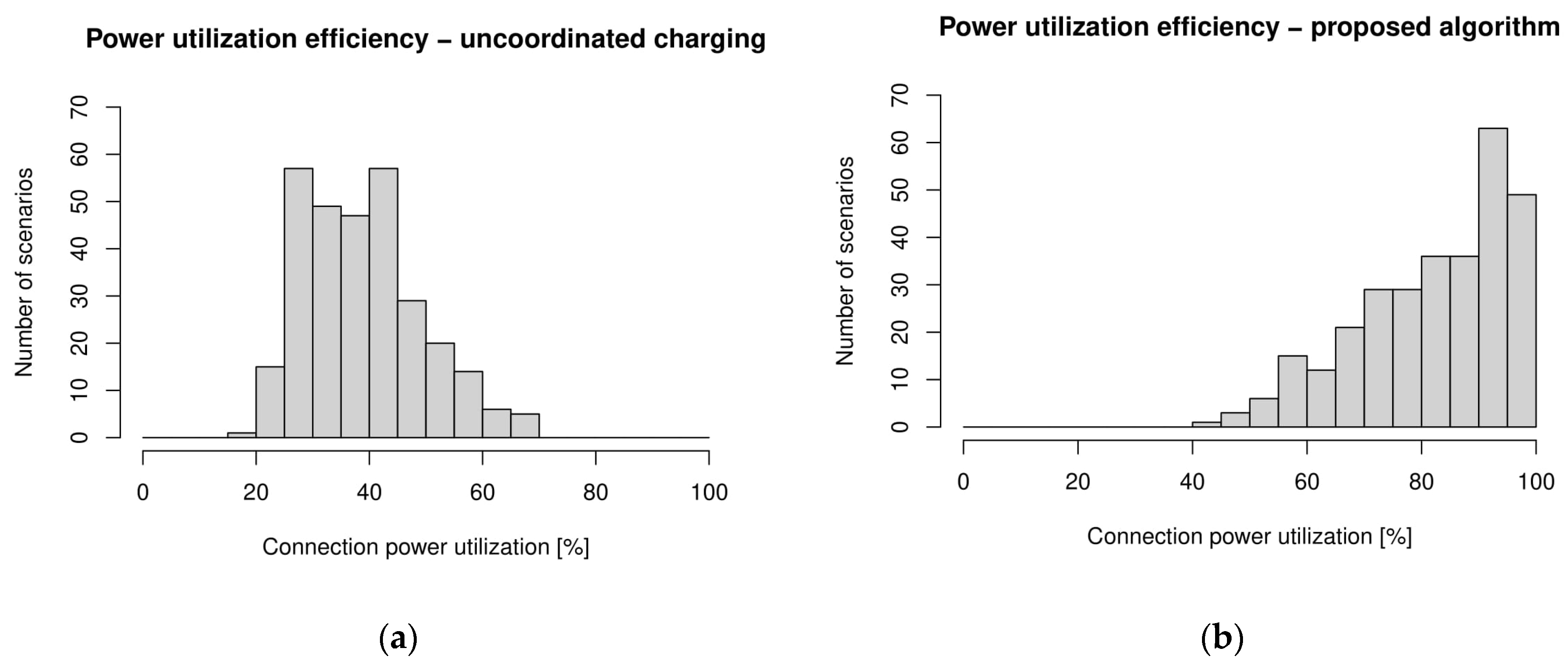
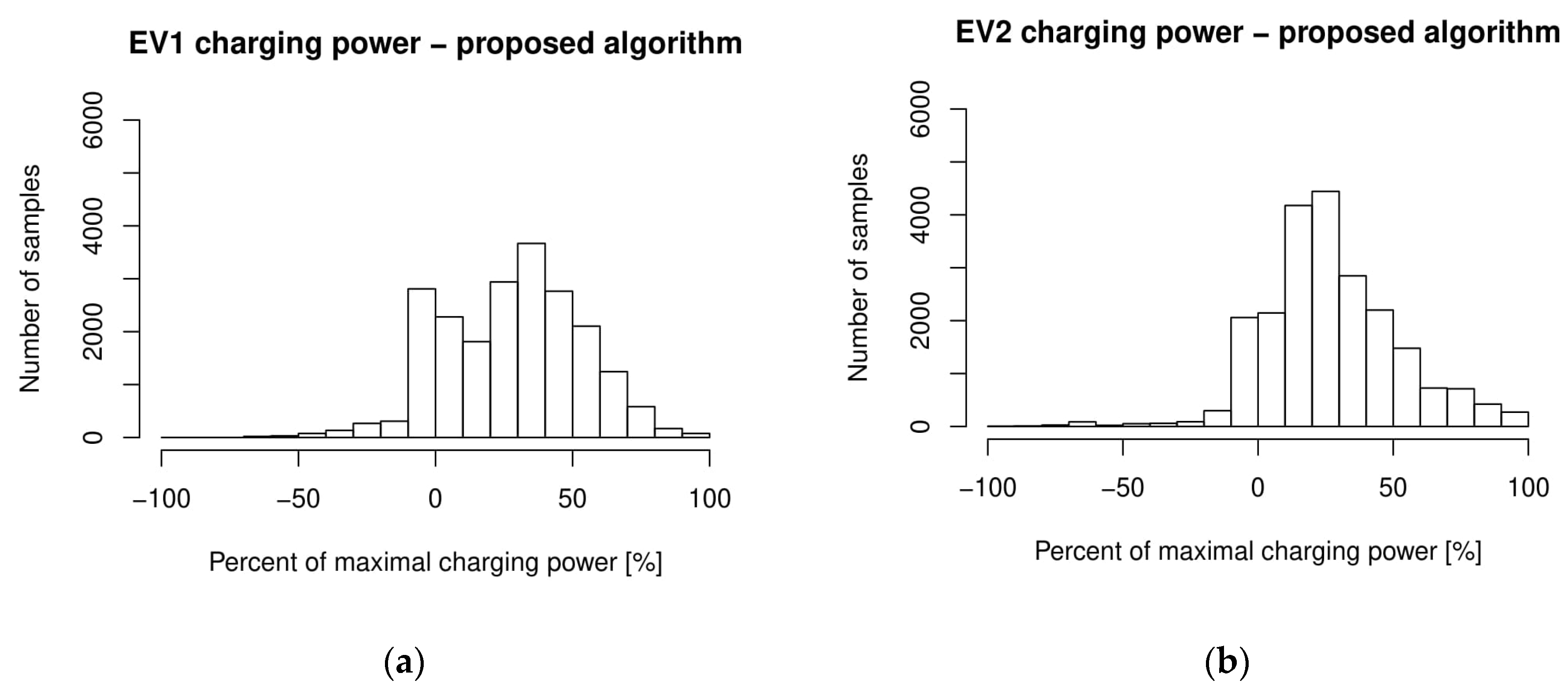
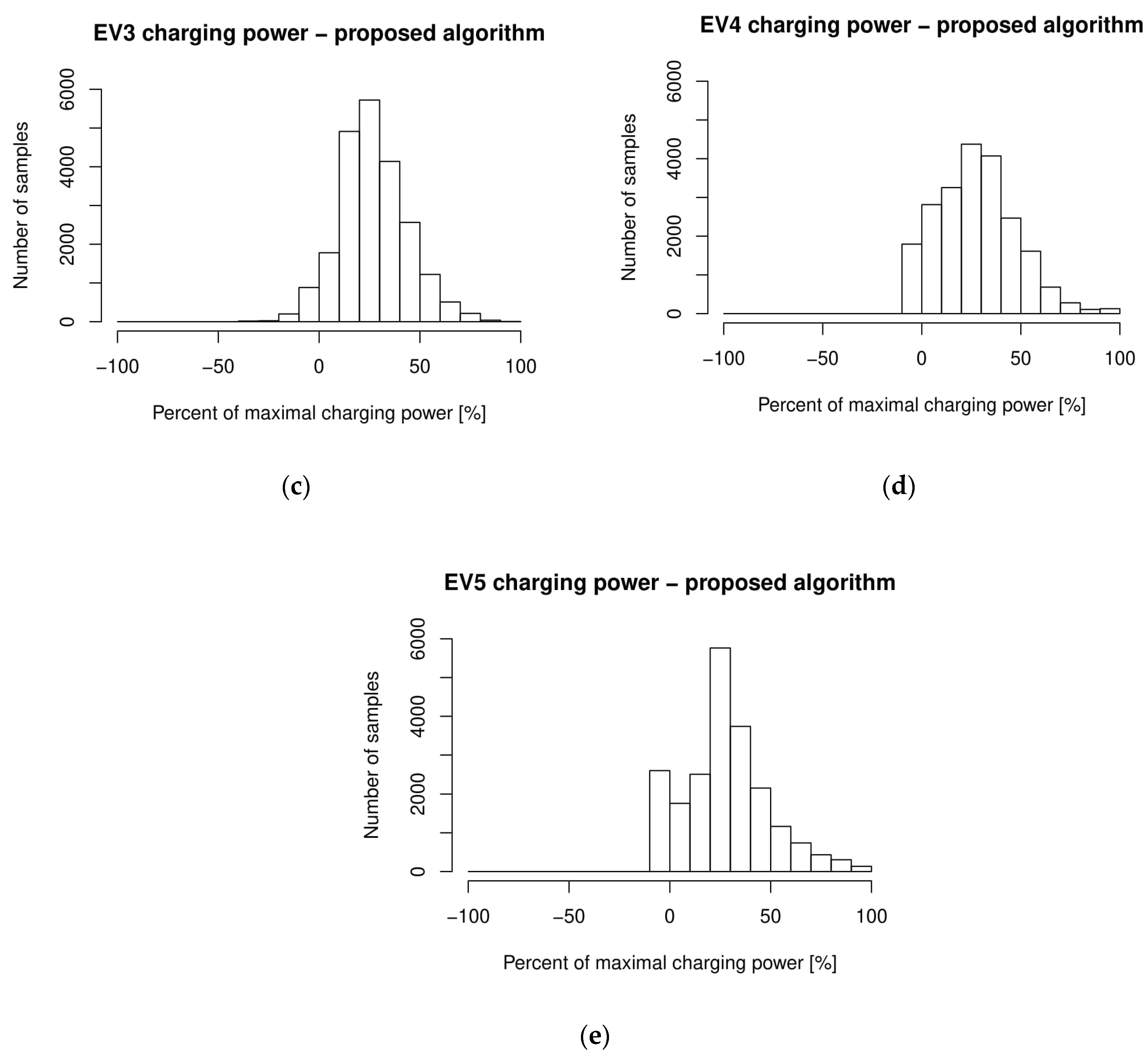
3.2. Simulation Results
4. Conclusions
- −
- Minimize the total power required by the EV parking lot while continuing to satisfy the needs of every connected EV to allow for lower demanded power, which then in turn reduces the strain on the power lines (to achieve the lowest possible demanded power, the algorithm allows for two-directional energy flow, from grid to vehicle but also from vehicle to grid or between the vehicles to maximize the algorithms power lowering potential),
- −
- Minimize the EV charging power, as well as minimize the charging profile variability to maximally extend the lives of EV batteries,
- −
- Allow regulatory action, which can take the form of total load reduction or even power supply (V2G) in a certain time period based on DR signal,
- −
- Ensuring that every accepted EV is charged as much it can be while staying in the constant current (CC) part of the charging characteristic before the user-specified departure time.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- The Paris Agreement. 2016. Available online: https://www.seforall.org/sites/default/files/The-Paris-Agreement.pdf (accessed on 16 May 2022).
- Burch, I.; Gilchrist, J.; Center for Climate Protection. Survey of Global Activity to Phase Out Internal Combustion Engine Vehicles. September 2018 Revision. Available online: https://theclimatecenter.org/wp-content/uploads/2018/09/Survey-on-Global-Activities-to-Phase-Out-ICE-Vehicles-FINAL.pdf (accessed on 16 May 2022).
- The World Bank. Electric Mobility & Development—An Engagement Paper from the World Bank and the International Association of Public Transport, Advanced Public Transport, Esmap. 2018. Available online: https://openknowledge.worldbank.org/bitstream/handle/10986/30922/eMobility_and_Development.pdf (accessed on 16 May 2022).
- U.S. Department of Energy. EV Everywhere Grand Challenge Blueprint. 2013. Available online: https://energy.gov/sites/prod/files/2014/02/f8/eveverywhere_blueprint.pdf (accessed on 15 June 2022).
- Accelerating the EV Transition. Report Prepared for WWF by Vivideconomics, Part 1—March, 2018. Final Report Part 1. Available online: https://www.wwf.org.uk/sites/default/files/2018-03/Final%20-%20WWF%20-%20accelerating%20the%20EV%20transition%20-%20part%201.pdf (accessed on 16 May 2022).
- Center for Climate Protection. The Transition to a Zero Emission Vehicle Fleet for Cars in the EU by 2050, a Policy Support Study Carried Out as Part of the EAFO Project for the European Commission Directorate General Mobility & Transport. Available online: http://www.eafo.eu/sites/default/files/The%20transition%20to%20a%20ZEV%20fleet%20for%20cars%20in%20the%20EU%20by%202050%20EAFO%20study%20November%202017.pdf (accessed on 16 May 2022).
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Zhang, G.; Tan, S.T.; Wang, G.G. Real-time smart charging of electric vehicles for demand charge reduction at non-residential sites. IEEE Trans. Smart Grid 2017, 9, 4027–4037. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Y.; Li, F.; Shen, Y. Dynamic economic/emission dispatch including pevs for peak shaving and valley filling. IEEE Trans. Ind. Electron. 2018, 66, 2880–2890. [Google Scholar] [CrossRef]
- Rassaei, F.; Soh, W.-S.; Chua, K.-C. Demand response for residential electric vehicles with random usage patterns in smart grids. IEEE Trans. Sustain. Energy 2015, 6, 1367–1376. [Google Scholar] [CrossRef]
- Xu, Z.; Su, W.; Hu, Z.; Song, Y.; Zhang, H. A hierarchical framework for coordinated charging of plug-in electric vehicles in China. IEEE Trans. Smart Grid 2015, 7, 428–438. [Google Scholar] [CrossRef]
- Karfopoulos, E.L.; Hatziargyriou, N.D. Distributed coordination of electric vehicles providing v2g services. IEEE Trans. Power Syst. 2015, 31, 329–338. [Google Scholar] [CrossRef]
- Cardona, J.E.; López, J.C.; Rider, M.J. Decentralized electric vehicles charging coordination using only local voltage magnitude measurements. Electr. Power Syst. Res. 2018, 161, 139–151. [Google Scholar] [CrossRef]
- Zheng, Y.; Shang, Y.; Shao, Z.; Jian, L. A novel real-time scheduling strategy with near-linear complexity for integrating large-scale electric vehicles into smart grid. Appl. Energy 2018, 217, 1–13. [Google Scholar] [CrossRef]
- Wang, L.; Sharkh, S.; Chipperfield, A. Optimal decentralized coordination of electric vehicles and renewable generators in a distribution network using a* search. Int. J. Electr. Power Energy Syst. 2018, 98, 474–487. [Google Scholar] [CrossRef]
- Omran, N.G.; Filizadeh, S. A semicooperative decentralized scheduling scheme for plug-in electric vehicle charging demand. Int. J. Electr. Power Energy Syst. 2017, 88, 119–132. [Google Scholar] [CrossRef]
- Xydas, E.; Marmaras, C.; Cipcigan, L.M. A multi-agent based scheduling algorithm for adaptive electric vehicles charging. Appl. Energy 2016, 177, 354–365. [Google Scholar] [CrossRef] [Green Version]
- Hajforoosh, S.; Masoum, M.A.S.; Islam, S.M. Online optimal variable charge-rate coordination of plug-in electric vehicles to maximize customer satisfaction and improve grid performance. Electr. Power Syst. Res. 2016, 141, 407–420. [Google Scholar] [CrossRef] [Green Version]
- Bina, V.T.; Ahmadi, D. Stochastic modeling for scheduling the charging demand of ev in distribution systems using copulas. Int. J. Electr. Power Energy Syst. 2015, 71, 15–25. [Google Scholar] [CrossRef]
- López, M.A.; de La Torre, S.; Martin, S.; Aguado, J.A. Demand-side management in smart grid operation considering electric vehicles load shifting and vehicle-to-grid support. Int. J. Electr. Power Energy Syst. 2015, 64, 689–698. [Google Scholar] [CrossRef]
- Masoum, A.S.; Deilami, S.; Abu-Siada, A.; Masoum, M.A.S. Fuzzy approach for online coordination of plug-in electric vehicle charging in smart grid. IEEE Trans. Sustain. Energy 2014, 6, 1112–1121. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.J.E.; Muttaqi, K.; Sutanto, D. Effective utilization of available pev battery capacity for mitigation of solar pv impact and grid support with integrated v2g functionality. IEEE Trans. Smart Grid 2015, 7, 1562–1571. [Google Scholar] [CrossRef] [Green Version]
- Sun, B.; Huang, Z.; Tan, X.; Tsang, D.H.K. Optimal scheduling for electric vehicle charging with discrete charging levels in distribution grid. IEEE Trans. Smart Grid 2016, 9, 624–634. [Google Scholar] [CrossRef]
- Hafez, O.; Bhattacharya, K. Integrating ev charging stations as smart loads for demand response provisions in distribution systems. IEEE Trans. Smart Grid 2016, 9, 1096–1106. [Google Scholar] [CrossRef]
- Liu, C.; Chai, K.K.; Zhang, X.; Lau, E.T.; Chen, Y. Adaptive blockchain-based electric vehicle participation scheme in smart grid platform. IEEE Access 2018, 6, 25657–25665. [Google Scholar] [CrossRef]
- Dubey, A.; Santoso, S. Electric vehicle charging on residential distribution systems: Impacts and mitigations. IEEE Access 2015, 3, 1871–1893. [Google Scholar] [CrossRef]
- Hussain, S.; Ahmed, M.A.; Kim, Y.-C. Efficient power management algorithm based on fuzzy logic inference for electric vehicles parking lot. IEEE Access 2019, 7, 65467–65485. [Google Scholar] [CrossRef]
- Yao, L.; Lim, W.H.; Tsai, T.S. A real-time charging scheme for demand response in electric vehicle parking station. IEEE Trans. Smart Grid 2016, 8, 52–62. [Google Scholar] [CrossRef]
- Mehta, R.; Srinivasan, D.; Khambadkone, A.M.; Yang, J.; Trivedi, A. Smart charging strategies for optimal integration of plug-in electric vehicles within existing distribution system infrastructure. IEEE Trans. Smart Grid 2016, 9, 299–312. [Google Scholar] [CrossRef]
- Tang, W.; Bi, S.; Zhang, Y.J.A. Online coordinated charging decision algorithm for electric vehicles without future information. IEEE Trans. Smart Grid 2014, 5, 2810–2824. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Countries | Level of EV Penetration | Increment in Peak Load |
|---|---|---|
| United Kingdom | 10% | 18% |
| 20% | 36% | |
| USA (Los Angeles) | 5% | 3% |
| 15% | 13% | |
| Belgium | 30% | 56% |
| Western Australia | 17% | 37% |
| 31% | 74% | |
| USA (California) | 10% | 17% |
| 20% | 43% | |
| The Netherlands | 30% | 54% |
| Portugal | 11% | 14% |
| Uncoordinated Charging | Coordinated Charging | |
|---|---|---|
| EV arrival time | random between 0 h and 12 h | random between 0 h and 12 h |
| EV charging time | 2 h | random between 2 h and 12 h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benysek, G.; Waśkowicz, B.; Dylewski, R.; Jarnut, M. Electric Vehicles Charging Algorithm with Peak Power Minimization, EVs Charging Power Minimization, Ability to Respond to DR Signals and V2G Functionality. Energies 2022, 15, 5195. https://doi.org/10.3390/en15145195
Benysek G, Waśkowicz B, Dylewski R, Jarnut M. Electric Vehicles Charging Algorithm with Peak Power Minimization, EVs Charging Power Minimization, Ability to Respond to DR Signals and V2G Functionality. Energies. 2022; 15(14):5195. https://doi.org/10.3390/en15145195
Chicago/Turabian StyleBenysek, Grzegorz, Bartosz Waśkowicz, Robert Dylewski, and Marcin Jarnut. 2022. "Electric Vehicles Charging Algorithm with Peak Power Minimization, EVs Charging Power Minimization, Ability to Respond to DR Signals and V2G Functionality" Energies 15, no. 14: 5195. https://doi.org/10.3390/en15145195