
A Novel Coordination Mechanism for Connected and Automated Vehicles in the Multi-Intersection Road Network


Abstract
:1. Introduction
- We provide a complete coordination mechanism for CAVs passing through the MiRN to minimize their traveling time;
- We develop a consensus prediction method to estimate the travel time of CAVs with different paths and propose a new strategy to solve the optimal path selection problem.
2. Problem Formulation
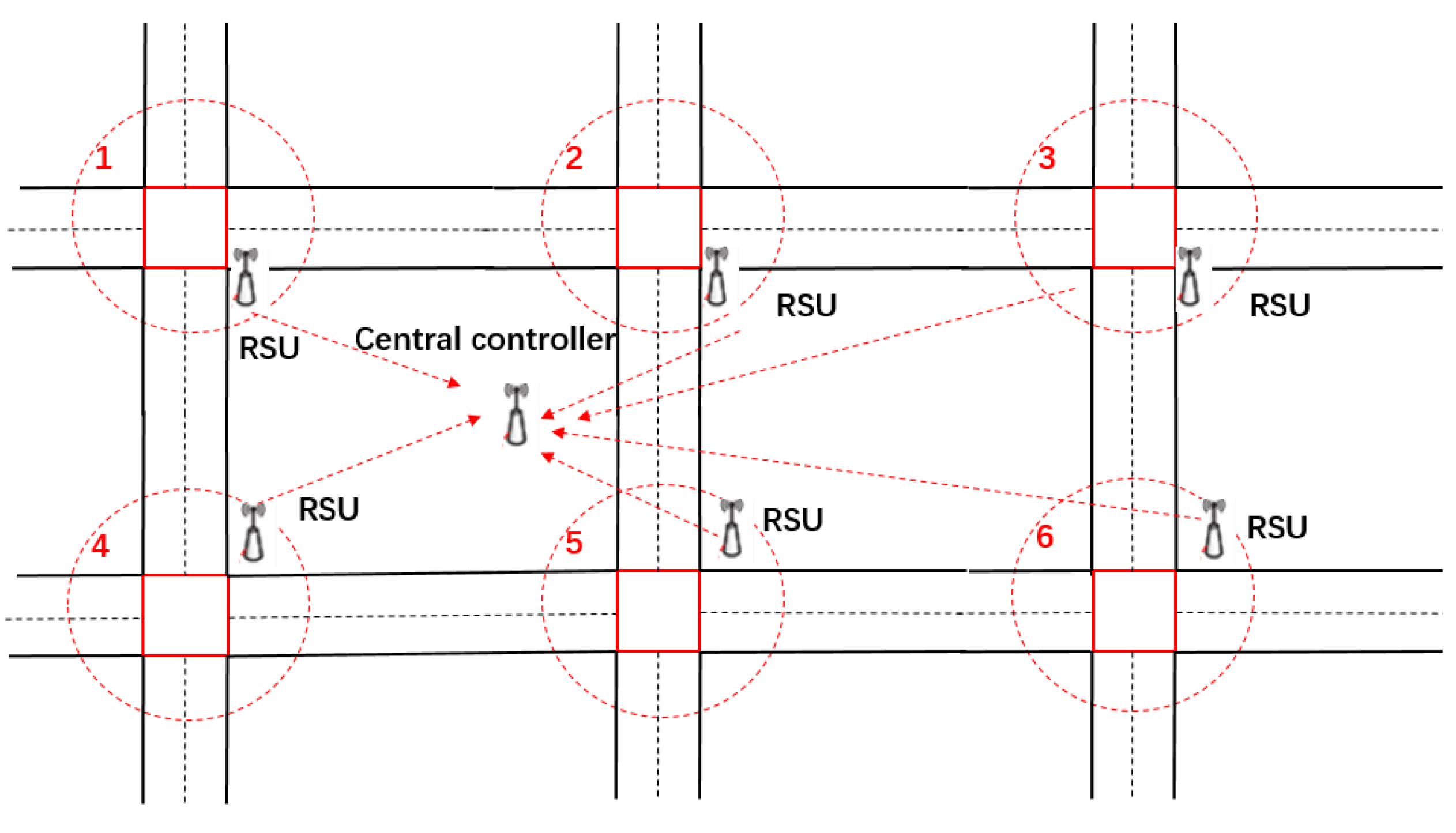
2.1. Scenario, Assumptions, and Notations
- All vehicles in the network are CAVs;
- Once the path for a CAV has been determined, lane changes are not permitted.
- The CAVs move with a constant velocity outside intersections.
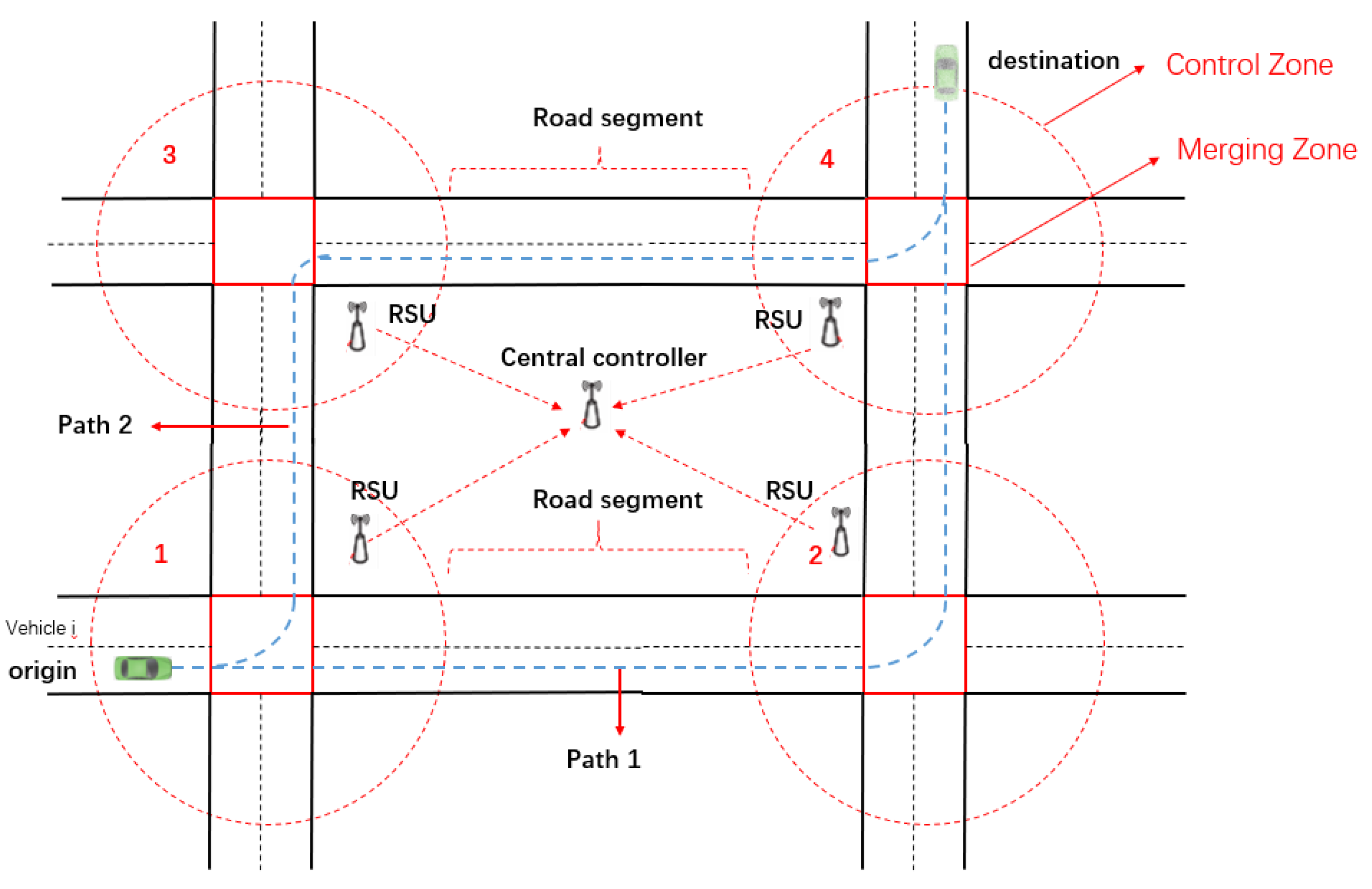
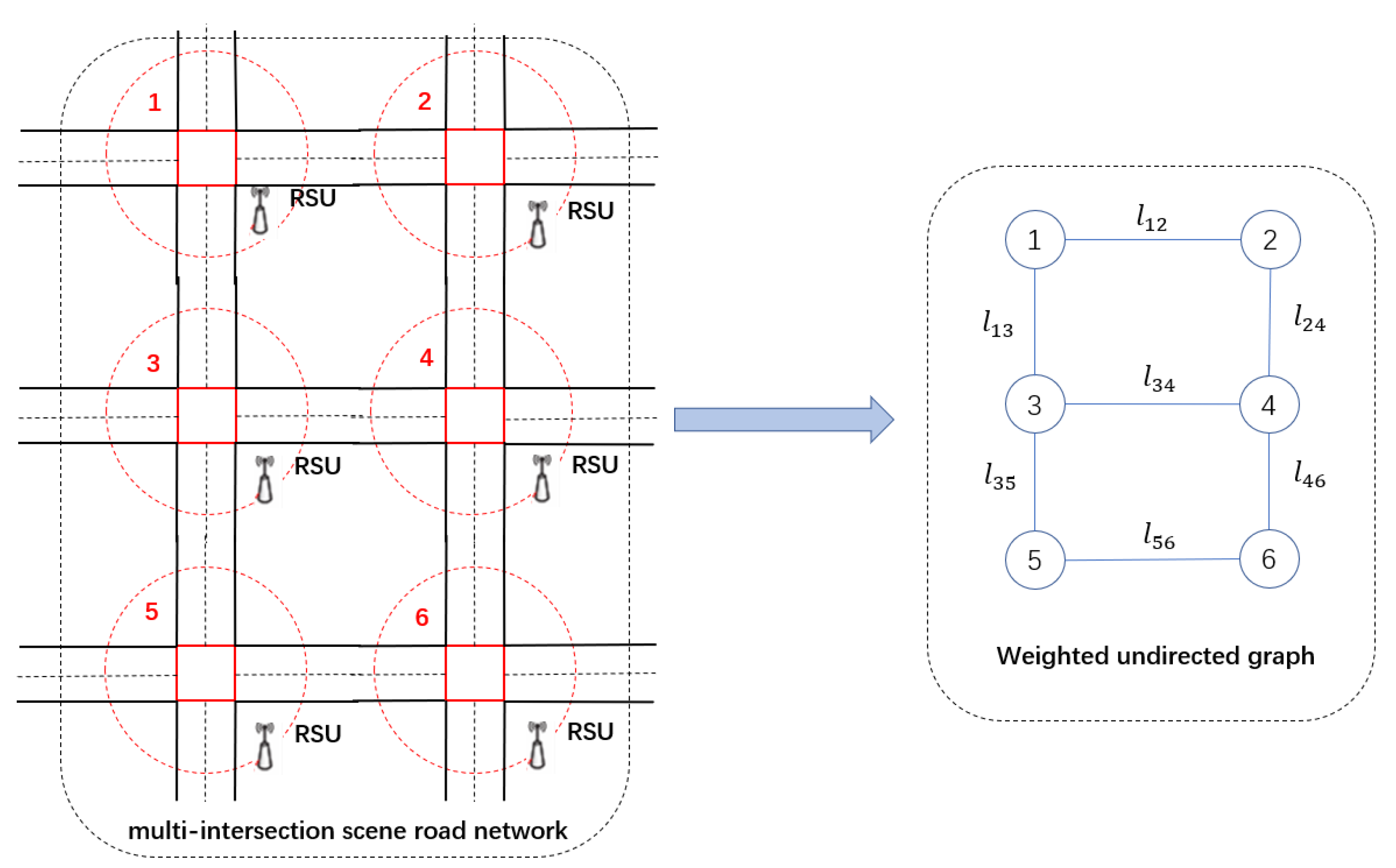
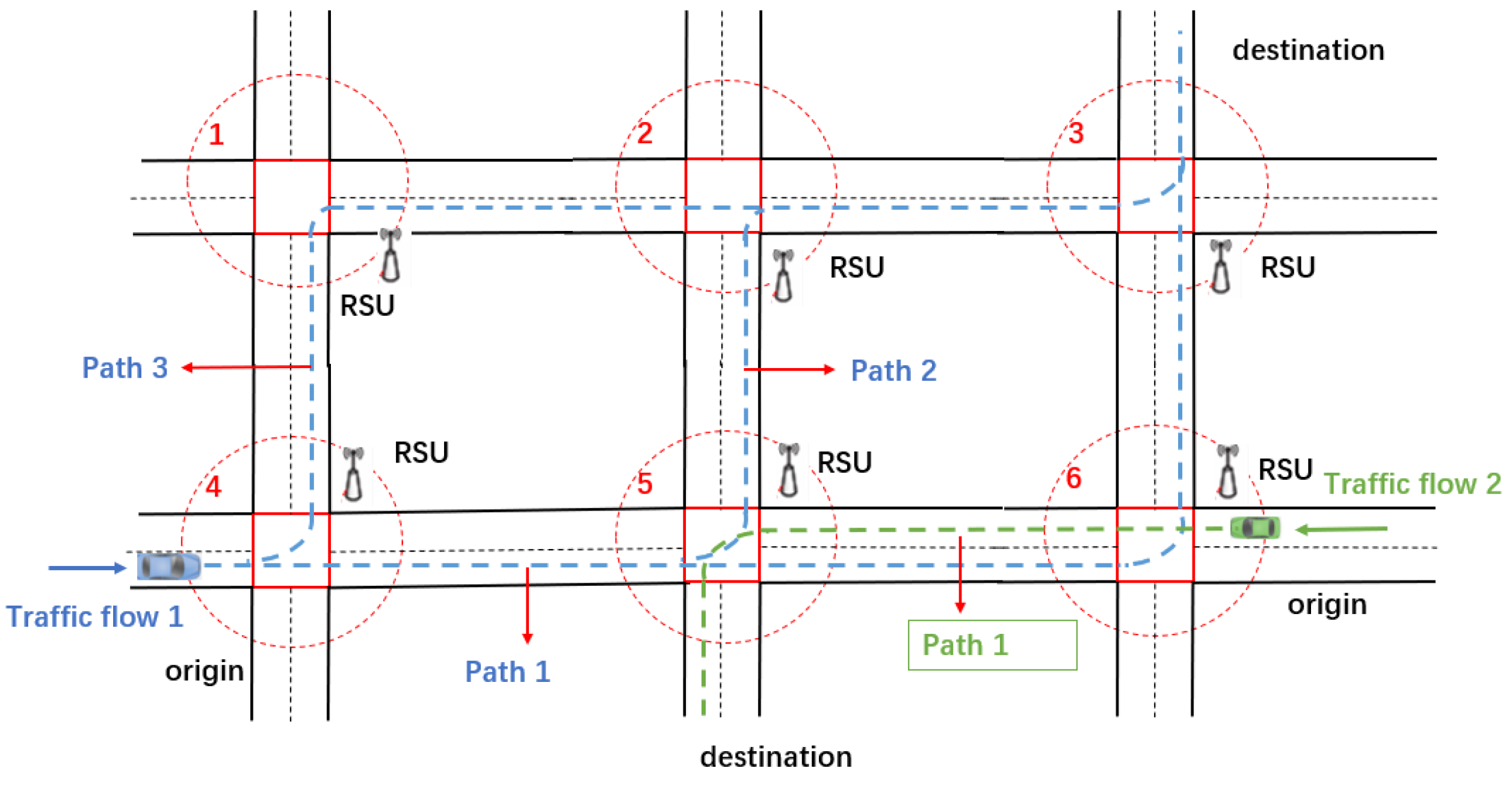
2.2. Path Planning Problem in the Road Network
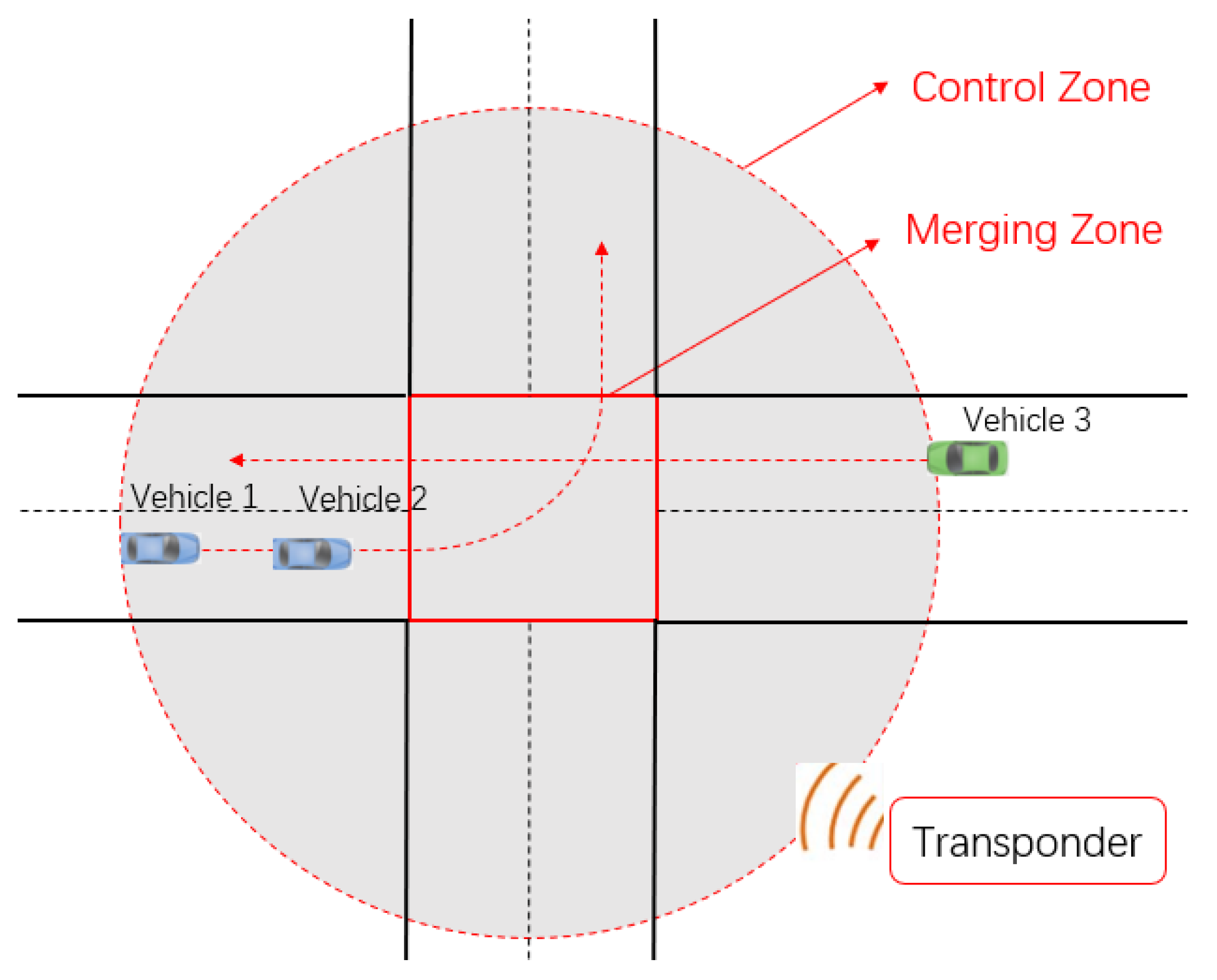
2.3. Constraints for CAVs in an Isolated Intersection
- Decision variables: to decide the sequence of the CAVs, we define a binary variable for each pair of CAVs that has a potential collision risk. If , vehicle has priority over vehicle to pass the intersections and vice versa;
- Lateral collision constraints: to avoid the lateral collision of the CAVs, represents the time when vehicle reaches the MZ area, denotes the safe time interval, and M is a positive and sufficiently large number [40]; the constraints for avoiding lateral collisions can thus be written as:
- Rear-end collision constraints: for constraints of rear-end collision, let represent the vehicle immediately preceding vehicle i in the same lane; denotes the location of vehicle at time t, denotes the safety distance, and denotes the length of the vehicle. The constraints can be expressed as:
- Acceleration and speed constraints: furthermore, the longitudinal acceleration and speed should be within acceptable ranges as follows:where and denote the minimum and maximum accelerations and and are the minimum and maximum speeds, respectively.
2.4. The Optimal Model and Solution
- It is not easy to find an optimal path for the CAVs. In the worst case, we must enumerate every possible path for each CAV to search for its global optimality;
- It makes the CAVs’ travel time calculation more complex and complicated. The CAVs pass through multiple intersections, which means we must deal with collisions at all intersections simultaneously.
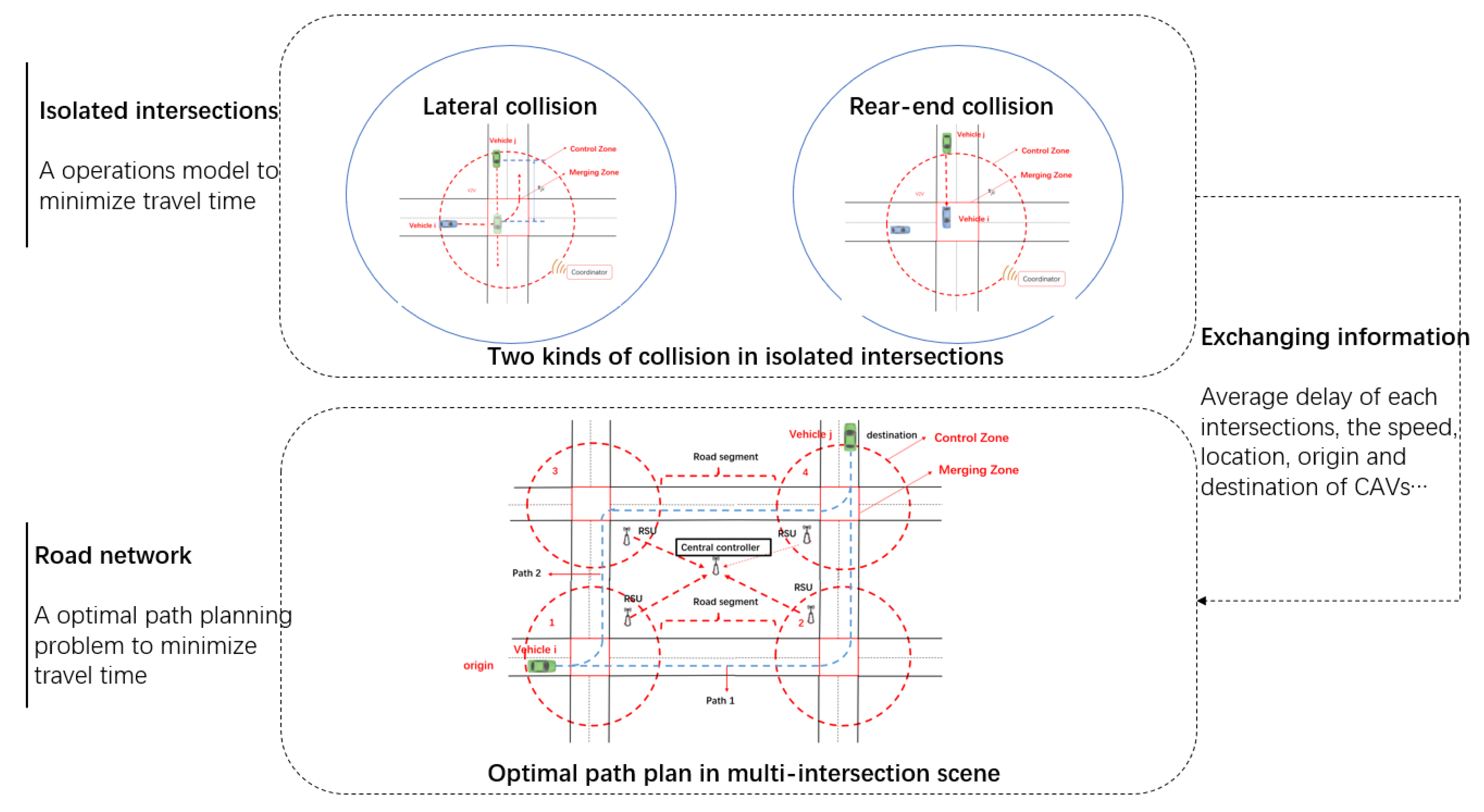
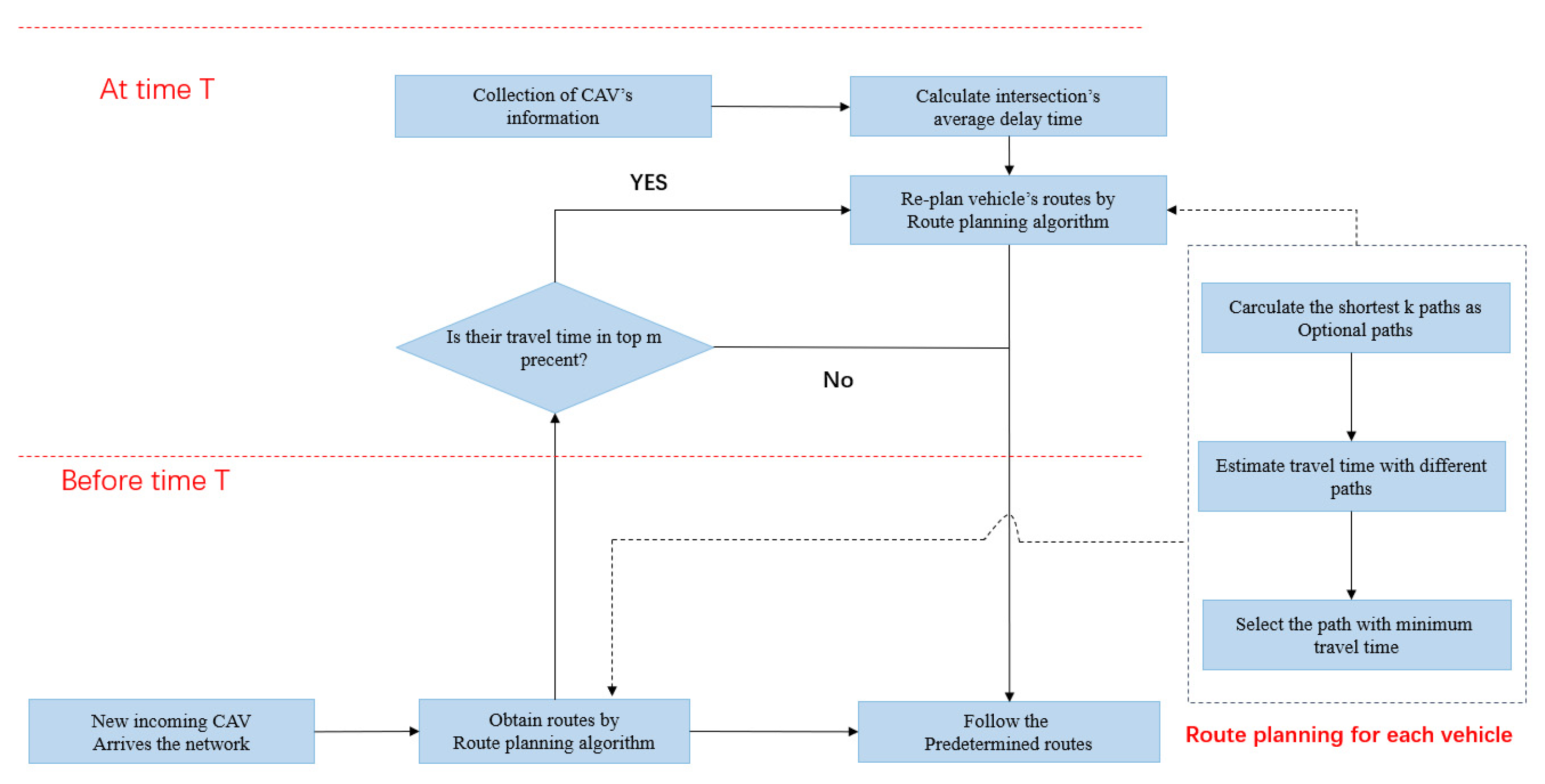
3. Coordination Driving Strategy
3.1. The Coordination Strategy in the MiRN
3.2. The Optimal Path Selection Algorithm
- Replace the node with another feasible node on the path and calculate the shortest path between and , and ; then, we obtain an alternative path ;
- Put into the set ;
- Repeat 1 and 2 until all intersections are calculated;
- Calculate the lengths of the paths in the set and select the shortest one as the (m + 1)-th shortest path . Remove from and put into .
| Algorithm 1: A greedy algorithm to optimize the path for CAVs. |
| input: origin and destination of vehicle i; the number k of the alternative path |
| output: the optimal path 1: Calculate the shortest path with the Dijkstra algorithm 2: Put into 3: while length() < k and there exist feasible path do: 4: for the last path in do: 5: for each node on the path do: 6: replace the node with on the path 7: calculate the shortest path between and , and 8: get the new alternative path and put it in 9: end for 10: end for 11: calculate the length of each path in 12: put the shortest path into and remove it from 13: end while 14: estimate the travel time for the vehicle i using (11),(12) 15: select the path with minimal travel time as the optimal path |
3.3. Scalability Discussion
4. Simulation and Discussion
4.1. Simulation Settings
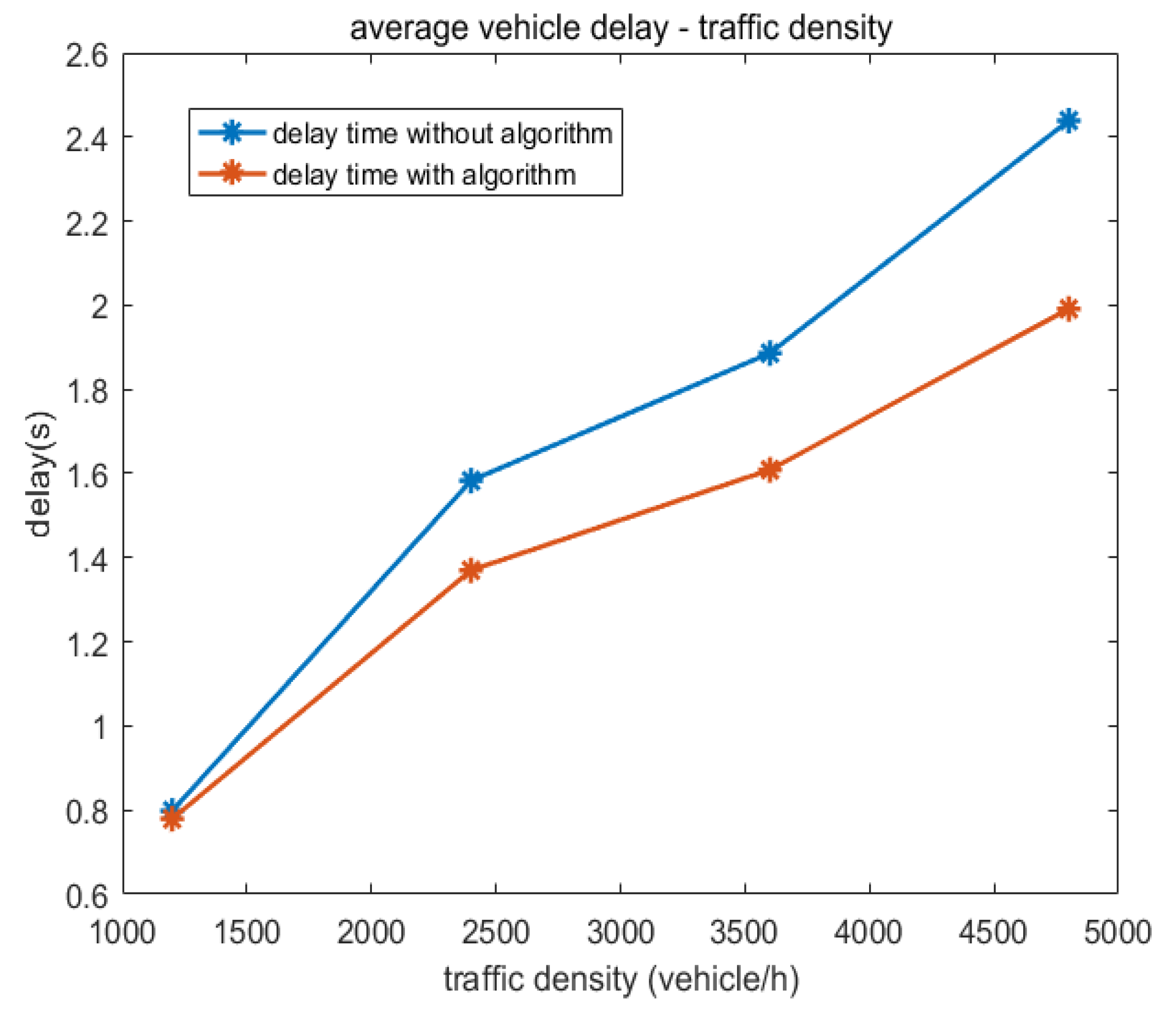
4.2. The Performance under Different Flow Rates
4.3. Comparison among Three Coordination Strategies in MiRN
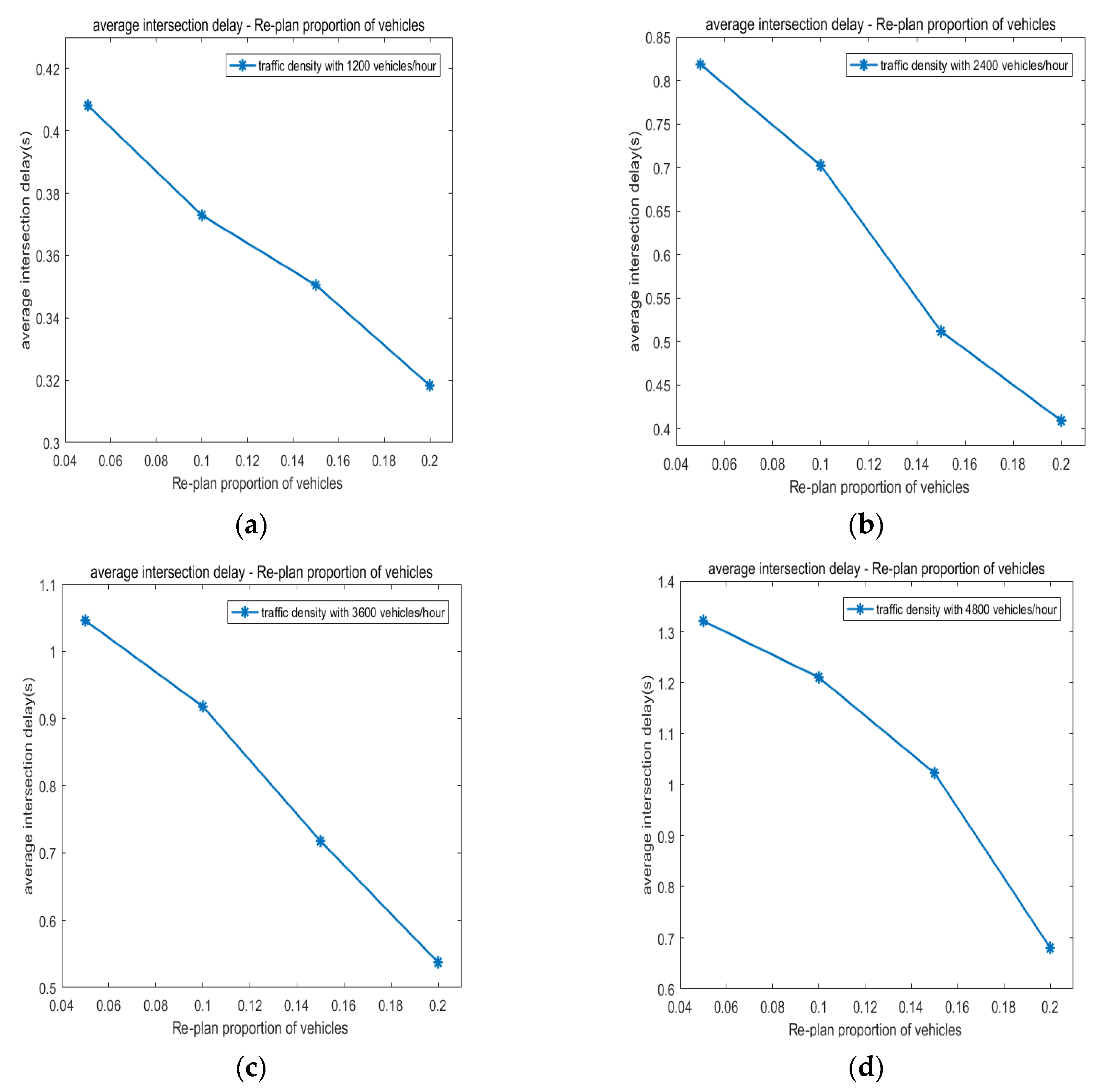
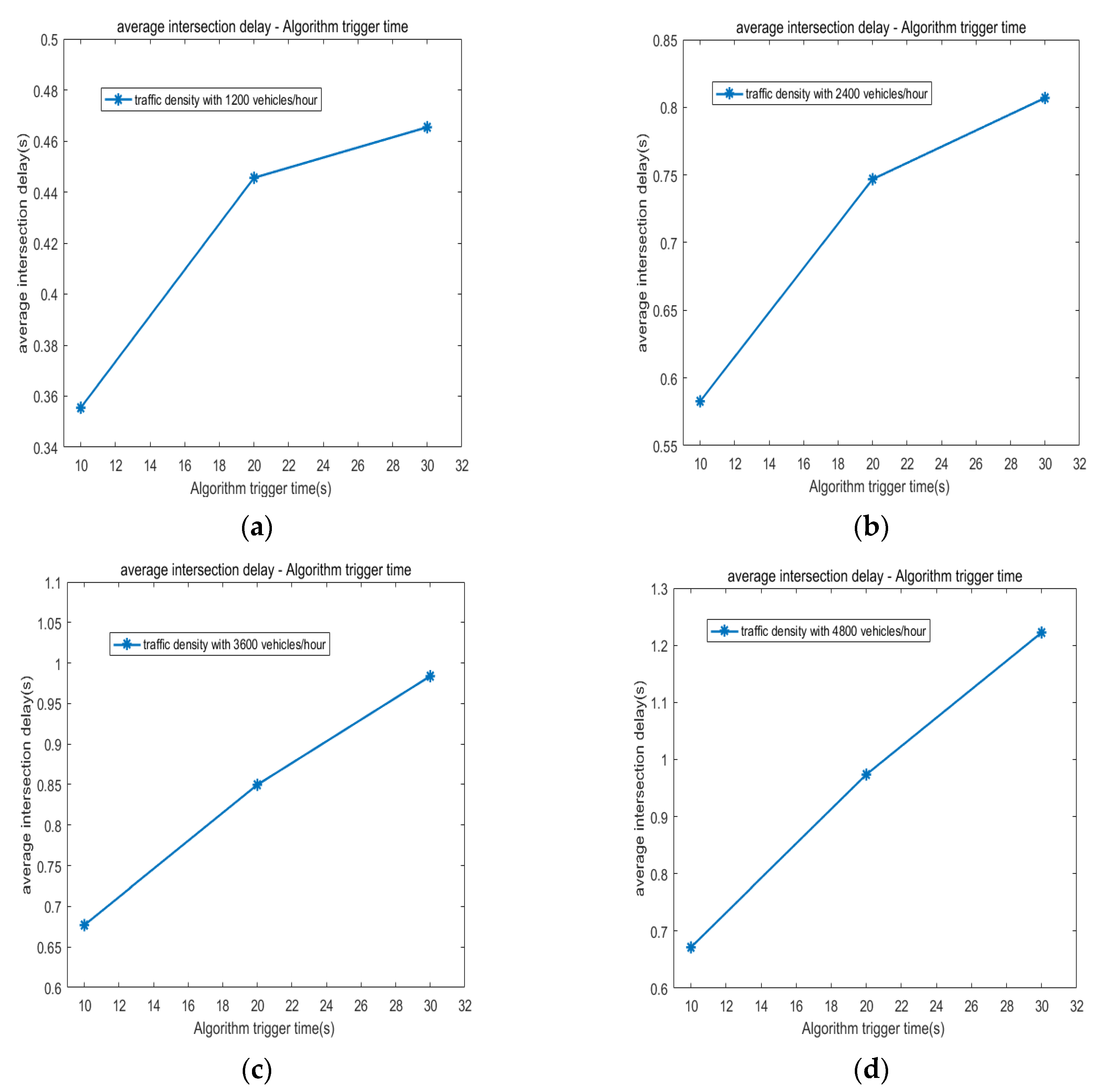
4.4. The Influence of Parameters under Different Flow Rates
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- DESA, U. World Urbanization Prospects: The 2018 Revision Population Division; The United Nations: New York, NY, USA, 2019; pp. 1–104.
- David, S.; Luke, A.; Bill, E.; Tim, L. 2021 Urban Mobility Report; Texas A&M Transportation Institute: College Station, TX, USA, 2021; (Online).
- Batty, M.; Axhausen, K.W.; Giannotti, F.; Pozdnoukhov, A.; Bazzani, A.; Wachowicz, M.; Ouzounis, G.; Portugali, Y. Smart cities of the future. Eur. Phys. J. Spec. Top. 2012, 214, 481–518. [Google Scholar] [CrossRef] [Green Version]
- Yang, K. Real-Time Urban Traffic Control in a Connected and Automated Vehicle Environment. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2018. [Google Scholar]
- Xiong, Z.; Sheng, H.; Rong, W.; Cooper, D.E. Intelligent transportation systems for smart cities: A progress review. Sci. China Inf. Sci. 2012, 55, 2908–2914. [Google Scholar] [CrossRef] [Green Version]
- Law, K.H.; Lynch, J.P. Smart City: Technologies and Challenges. IT Prof. 2019, 21, 46–51. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Ahmed, H.U.; Huang, Y.; Lu, P.; Bridgelall, R. Technology Developments and Impacts of Connected and Autonomous Vehicles: An Overview. Smart Cities 2022, 5, 382–404. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; Ding, H.; Yuan, K.; Qin, Y. A novel local motion planning framework for autonomous vehicles based on resistance network and model predictive control. IEEE Trans. Veh. Technol. 2020, 69, 55–66. [Google Scholar] [CrossRef]
- Singh, S. Critical reasons for crashes investigated in the national motor vehicle crash causation survey. (No. DOT HS 812 115); In Traffic Facts–Crash Stats; US Department of Transportation: Washington, DC, USA, 2015. [Google Scholar]
- Rios-Torres, J.; Malikopoulos, A.A. A Survey on the Coordination of Connected and Automated Vehicles at Intersections and Merging at Highway On-Ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1066–1077. [Google Scholar] [CrossRef]
- Agarwal, V.; Sharma, S.; Agarwal, P. IoT Based Smart Transport Management and Vehicle-to-Vehicle Communication System. In Computer Networks, Big Data and IoT; Springer: Singapore, 2021; pp. 709–716. [Google Scholar]
- Ezenwa, L. Wireless V2V Communication with DSRC Technology in Comparison to C-V2X. ATZ Worldw 2022, 124, 40–43. [Google Scholar] [CrossRef]
- Shah, K.; Chadotra, S.; Tanwar, S.; Gupta, R.; Kumar, N. Blockchain for IoV in 6G environment: Review solutions and challenges. Clust. Comput. 2022, 25, 1927–1955. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Automated Driving Systems 2.0: A Vision for Safety; US Department of Transportation, DOT HS: Washington, DC, USA, 2017; Volume 812, p. 442.
- Bergen, M. Alphabet Launches the First Taxi Service with No Human Drivers. Retrieved from Bloomberg Technology. 2017. Available online: https://bloom.bg/2Ea2dml (accessed on 22 April 2022).
- Lee, T.B. Fully Driverless Cars Could be Months Away. Ars Tech. 2017, 3. (Online). [Google Scholar]
- Dong, C.; Chen, X.; Dong, H.; Yang, K.; Guo, J.; Bai, Y. Research on Intelligent Vehicle Infrastructure Cooperative System Based on Zigbee. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 1337–1343. [Google Scholar]
- Gao, J.; Cao, C.; Li, W.; Li, X. Research and Verification of Risk Prevention Methods for Commercial Vehicles Based on Intelligent Vehicle and Infrastructure System. In Proceedings of the 2020 4th Annual International Conference on Data Science and Business Analytics (ICDSBA), Changsha, China, 5–6 September 2020; pp. 191–194. [Google Scholar]
- Chu, W.; Wuniri, Q.; Du, X.; Xiong, Q.; Huang, T.; Li, K. Cloud Control System Architectures, Technologies and Applications on Intelligent and Connected Vehicles: A Review. Chin. J. Mech. Eng. 2021, 34, 139. [Google Scholar] [CrossRef]
- Molina, C.B.S.T.; Almeida, J.R.d.; Vismari, L.F.; González, R.I.R.; Naufal, J.K.; Camargo, J. Assuring Fully Autonomous Vehicles Safety by Design: The Autonomous Vehicle Control (AVC) Module Strategy. In Proceedings of the 2017 47th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W), Denver, CO, USA, 26–29 June 2017; pp. 16–21. [Google Scholar]
- Subraveti, H.H.S.N.; Srivastava, A.; Ahn, S.; Knoop, V.L.; van Arem, B. On lane assignment of connected automated vehicles: Strategies to improve traffic flow at diverge and weave bottlenecks. Transp. Res. Part C: Emerg. Technol. 2021, 127, 103126. [Google Scholar] [CrossRef]
- Tachet, R.; Santi, P.; Sobolevsky, S.; Reyes-Castro, L.I.; Frazzoli, E.; Helbing, D.; Ratti, C. Revisiting Street Intersections Using Slot-Based Systems. PLoS ONE 2016, 11, e0149607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mahbub, A.; Karri, V.; Parikh, D.; Jade, S.; Malikopoulos, A.A. A Decentralized Time- and Energy-Optimal Control Framework for Connected Automated Vehicles: From Simulation to Field Test. arXiv 2019, arXiv:1911.01380. [Google Scholar]
- Jiang, Z.; Yu, D.; Zhou, H.; Luan, S.; Xing, X. A Trajectory Optimization Strategy for Connected and Automated Vehicles at Junction of Freeway and Urban Road. Sustainability 2021, 13, 9933. [Google Scholar] [CrossRef]
- Chai, L.; Shen, G.; Ye, W. The Traffic Flow Model for Single Intersection and Its Traffic Light Intelligent Control Strategy. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 8558–8562. [Google Scholar]
- Garg, V.; Sachan, A.; Kumar, N.; Mittal, S. Congestion Control Utilizing Software Defined Control Architecture at the Traffic Light Intersection. In Proceedings of the 2021 IEEE 18th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Denver, CO, USA, 4–7 October 2021; pp. 597–602. [Google Scholar]
- Meng, Y.; Li, L.; Wang, F.; Li, K.; Li, Z. Analysis of cooperative driving strategies for Nonsignalized intersections. IEEE Trans. Veh. Technol. 2018, 67, 2900–2911. [Google Scholar] [CrossRef]
- Huang, S.; Sadek, A.W.; Zhao, Y. Assessing the mobility and environmental benefits of reservation-based intelligent intersections using an integrated simulator. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1201–1214. [Google Scholar] [CrossRef]
- Zhang, Y.; Malikopoulos, A.A.; Cassandras, C.G. Decentralized optimal Control for connected automated vehicles at intersections including left and right turns. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 4428–4433. [Google Scholar]
- Rahmati, Y.; Talebpour, A. Towards a collaborative connected, automated driving environment: A game theory based decision framework for unprotected left turn maneuvers. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Dong, H.; Dai, Z. A multi intersections signal coordinate control method based on game theory. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 1232–1235. [Google Scholar]
- Miculescu, D.; Karaman, S. Polling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections With No Traffic Signals. IEEE Trans. Autom. Control. 2020, 65, 680–694. [Google Scholar] [CrossRef]
- Ahn, H.; del Vecchio, D. Safety Verification and Control for Collision Avoidance at Road Intersections. IEEE Trans. Autom. Control. 2018, 63, 630–642. [Google Scholar] [CrossRef]
- Li, L.; Wang, F. Cooperative driving at adjacent blind intersections. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005. [Google Scholar]
- Ashtiani, F.; Fayazi, S.A.; Vahidi, A. Multi-intersection traffic management for autonomous vehicles via distributed mixed-integer linear programming. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 6341–6346. [Google Scholar]
- Chalaki, B.; Malikopoulos, A.A. An optimal coordination framework for connected and automated vehicles in two interconnected intersections. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 888–893. [Google Scholar]
- Darmoul, A.S.; Elkosantini, S.; Louati, A.; Said, L.B. Multi-agent immune networks to control interrupted flow at signalized intersections-ScienceDirect. Transp. Res. Part C: Emerg. Technol. 2017, 82, 290–313. [Google Scholar] [CrossRef]
- Chin, Y.K.; Kow, W.Y.; Khong, W.L.; Tan, M.K.; Teo, K.T.K. Q-Learning Traffic Signal Optimization within Multiple Intersections Traffic Network. In Proceedings of the 2012 Sixth UKSim/AMSS European Symposium on Computer Modeling and Simulation, Malta, Malta, 14–16 November 2012; pp. 343–348. [Google Scholar]
- Pei, H.; Zhang, Y.; Tao, Q.; Feng, S.; Li, L. Distributed Cooperative Driving in Multi-Intersection Road Networks. IEEE Trans. Veh. Technol. 2021, 70, 99. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, P.; Lu, G. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks. Transp. Res. Part C Emerg. Technol. 2020, 111, 458–476. [Google Scholar] [CrossRef]
- Li, L.; Wang, F. Cooperative driving at blind crossings using intervehicle communication. IEEE Trans. Veh. Technol. 2006, 55, 1712–1724. [Google Scholar] [CrossRef]
- Boukouvala, F.; Misener, R.; Floudas, C.A. Global optimization advances in Mixed-Integer Nonlinear Programming, MINLP, and Constrained Derivative-Free Optimization, CDFO. Eur. J. Oper. Res. 2016, 252, 701–727. [Google Scholar] [CrossRef] [Green Version]
- Hoffman, W.; Pavley, R. A method of solution of the Nth best path problem. J. ACM 1959, 6, 506–514. [Google Scholar] [CrossRef]
- Yen, J.Y. Finding the k shortest loopless paths in a network. Manag. Sci. 1971, 17, 712–716. [Google Scholar] [CrossRef]
- Chen, L.; Hu, T. Flow Equilibrium Under Dynamic Traffic Assignment and Signal Control—An Illustration of Pretimed and Actuated Signal Control Policies. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1266–1276. [Google Scholar] [CrossRef]
- Mahbub, A.M.I.; Le, V.-A.; Malikopoulos, A.A. Safety-Aware and Data-Driven Predictive Control for Connected Automated Vehicles at a Mixed Traffic Signalized Intersection. arXiv 2022, arXiv:2203.05739. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Meaning |
|---|---|
| the width of each lane | |
| the distance from the entrance of the CZ | |
| the length and width of each vehicle | |
| the minimum and maximum speed | |
| the minimum and maximum acceleration | |
| the position of the middle of vehicle | |
| the speed of vehicle | |
| the time when vehicle enters MZ | |
| the minimal time when vehicle enters MZ | |
| the path set for vehicle from origin to destination | |
| one of the paths for vehicle from its origin to destination | |
| the time consumed in the road segment within the path | |
| the delay time passing intersections within the path | |
| the assigned arrival time of vehicle in intersection | |
| the average delay in isolated intersection at time t | |
| the set of CAVs in the intersection at time | |
| the minimal arrival time of vehicle to reach intersection k | |
| the candidate path set for the vehicle i | |
| T | the cycle time of exchanging information |
| M | the percent of rerouting CAVs |
| K | the number of the candidate path |
| Flow Rate (veh/h) | Coordination Strategy | Average Travel Time (s) | Average Speed (m/s) |
|---|---|---|---|
| 1200 | The Proposed Method | 52.963 | 24.413 |
| Fixed STA | 325.750 | 3.991 | |
| Actuated STA | 203.565 | 6.39 | |
| 2400 | The Proposed Method | 55.108 | 23.590 |
| Fixed STA | 348.415 | 3.731 | |
| Actuated STA | 229.393 | 5.67 | |
| 3600 | The Proposed Method | 57.813 | 22.486 |
| Fixed STA | 355.723 | 3.655 | |
| Actuated STA | 232.048 | 5.602 | |
| 4800 | The Proposed Method | 59.362 | 21.899 |
| Fixed STA | 359.445 | 3.617 | |
| Actuated STA | 242.025 | 5.371 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhao, J. A Novel Coordination Mechanism for Connected and Automated Vehicles in the Multi-Intersection Road Network. Energies 2022, 15, 5168. https://doi.org/10.3390/en15145168
Zhang Y, Zhao J. A Novel Coordination Mechanism for Connected and Automated Vehicles in the Multi-Intersection Road Network. Energies. 2022; 15(14):5168. https://doi.org/10.3390/en15145168
Chicago/Turabian StyleZhang, Yuanhao, and Jiabao Zhao. 2022. "A Novel Coordination Mechanism for Connected and Automated Vehicles in the Multi-Intersection Road Network" Energies 15, no. 14: 5168. https://doi.org/10.3390/en15145168