
A Critical Review of Improved Deep Convolutional Neural Network for Multi-Timescale State Prediction of Lithium-Ion Batteries


Abstract
:1. Introduction
2. Analysis of Various State Predictions of Lithium-Ion Batteries
2.1. Overview of the State-of-Charge Prediction
- Discharge rate
- 2.
- Battery temperature
- 3.
- Number of cycles
- 4.
- Self-discharge rate
- 5.
- Discharge test method
- 6.
- Open-circuit voltage method
- 7.
- Ampere-hour integral method
- 8.
- Internal resistance measurement method
- 9.
- Data-driven method
- 10.
- Kalman filtering method
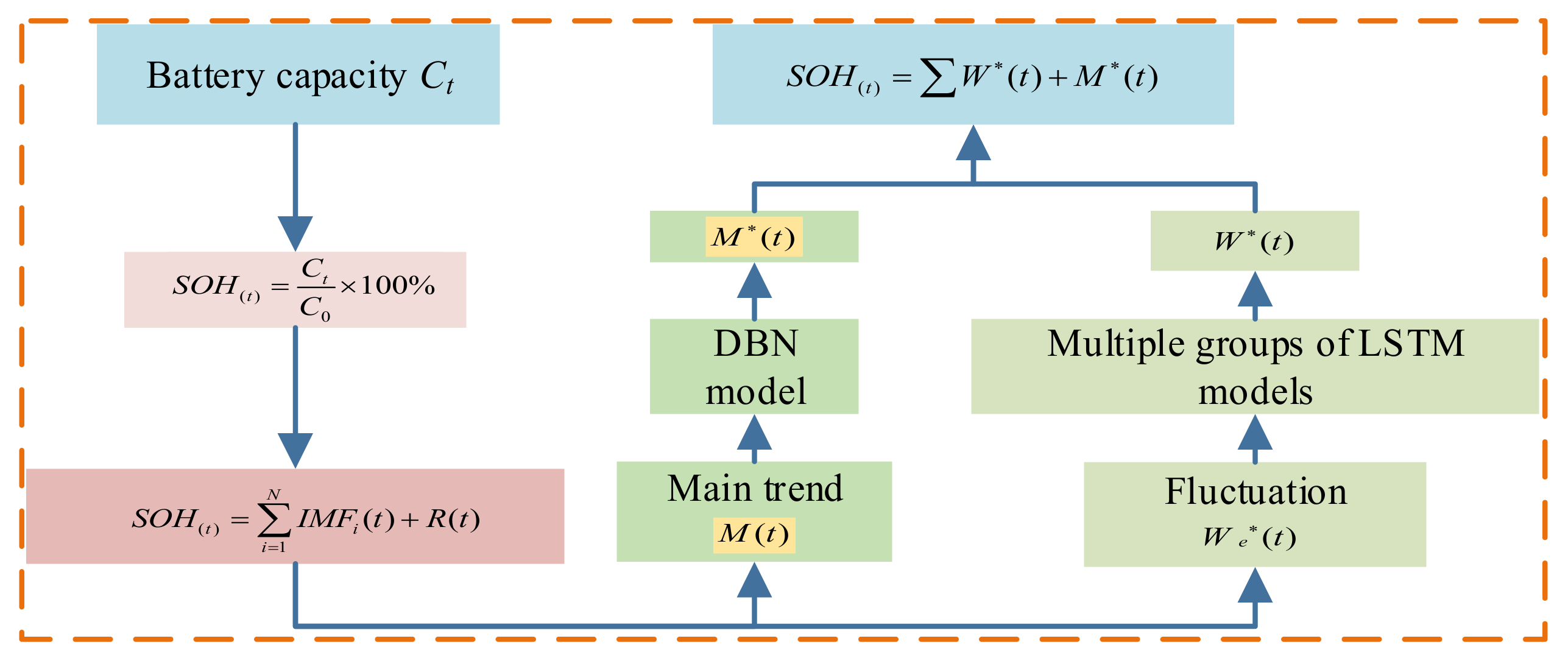
2.2. Overview of the State of Health Prediction
2.3. Overview of the State-of-Power Prediction
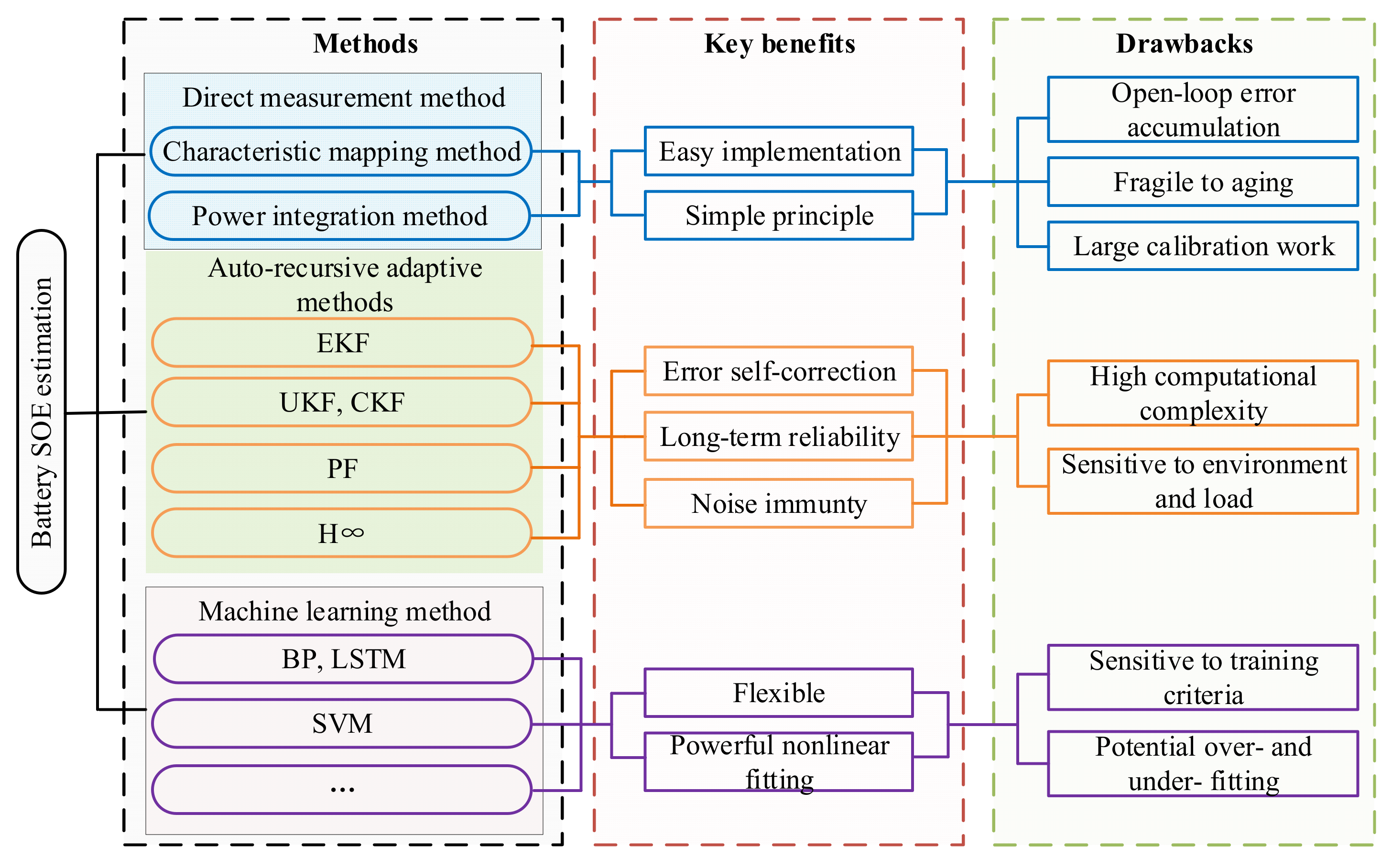
2.4. Overview of the State-of-Energy Prediction
- Power integration method
- 2.
- Data-driven SOE prediction method
- 3.
- Model-based SOE prediction method
- 4.
- Extended Kalman filter
- 5.
- Cubature Kalman filtering method
- 6.
- Particle filter
- 7.
- Multistate collaborative prediction
3. Deep Convolutional Neural Network for State Prediction
3.1. Mathematical Modeling of Deep Learning
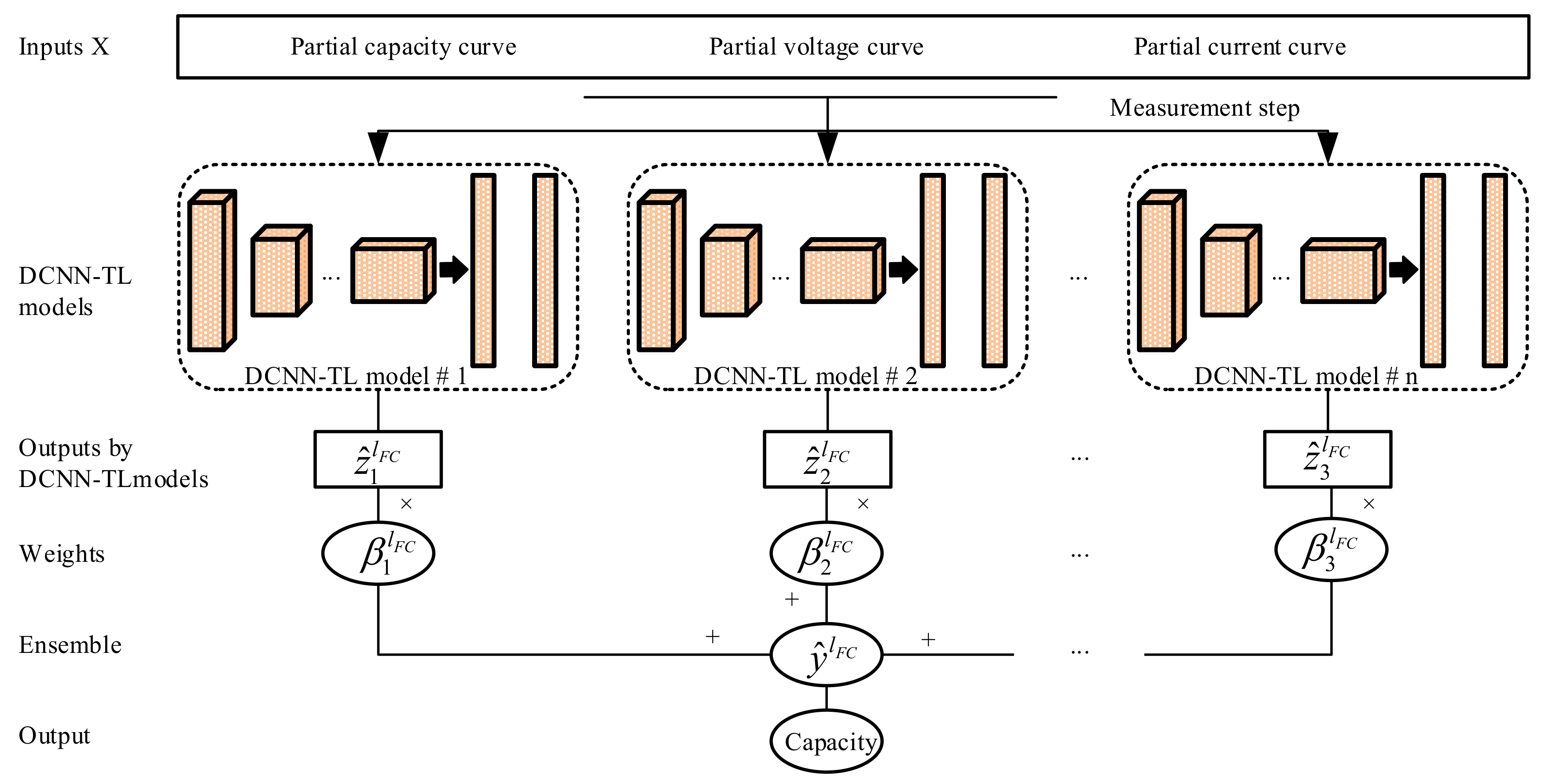
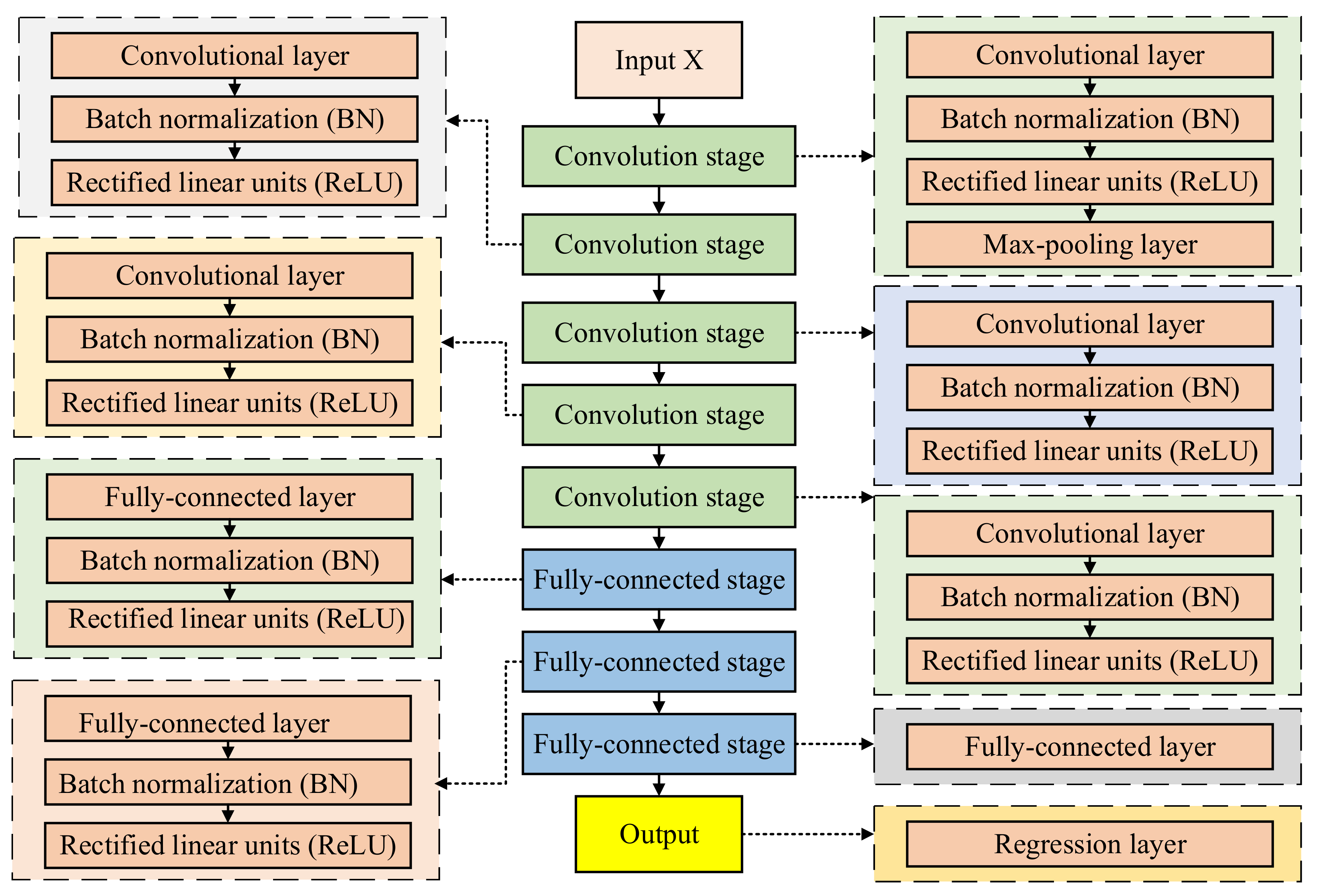
3.2. DCNN-Based Calculation Framework
3.3. Application Analysis from Other Studies
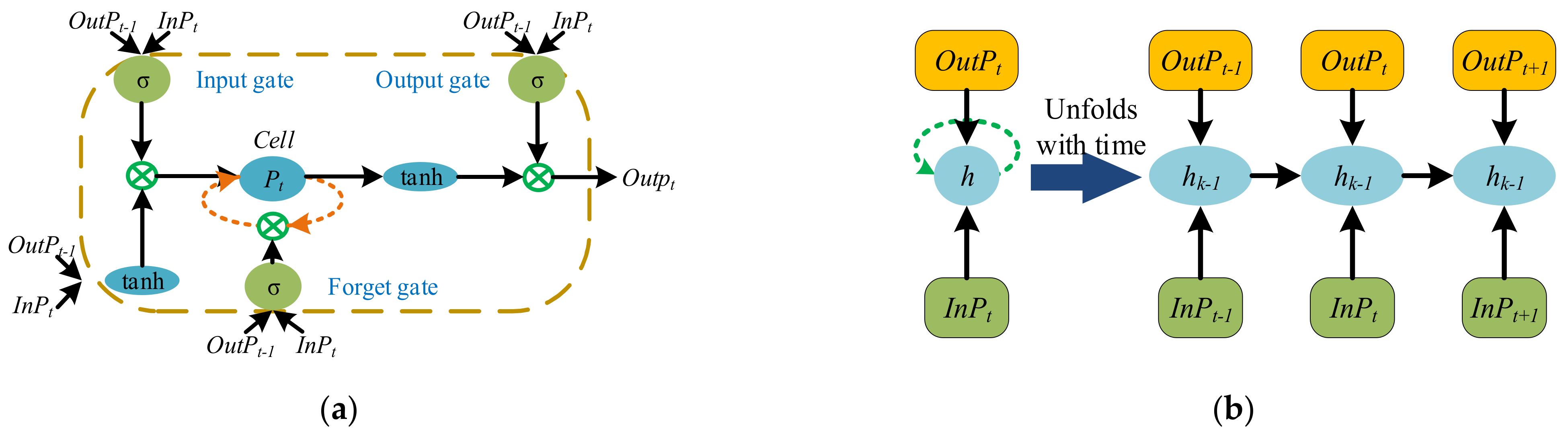
3.4. Deep Learning for State Prediction
4. Comparative Analysis of State Prediction Effects Using Different DL Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiong, R.; Li, L.; Tian, J. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–29. [Google Scholar] [CrossRef]
- Ren, H.B.; Zhao, Y.Z.; Chen, S.Z.; Wang, T.P. Design and implementation of a battery management system with active charge balance based on the SOC and SOH online estimation. Energy 2019, 166, 908–917. [Google Scholar] [CrossRef]
- Cen, Z.H.; Kubiak, P. Lithium-ion battery SOC/SOH adaptive estimation via simplified single particle model. Int. J. Energy Res. 2020, 44, 12444–12459. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Xiao, E.; Wong, C.-K. Joint SoC and SoH Estimation for Zinc–Nickel Single-Flow Batteries. IEEE Trans. Ind. Electron. 2020, 67, 8484–8494. [Google Scholar] [CrossRef]
- Feng, Y.; Xue, C.; Han, Q.; Han, F.; Du, J. Robust Estimation for State-of-Charge and State-of-Health of Lithium-Ion Batteries Using Integral-Type Terminal Sliding-Mode Observers. IEEE Trans. Ind. Electron. 2020, 67, 4013–4023. [Google Scholar] [CrossRef]
- Hu, X.; Yuan, H.; Zou, C.; Li, Z.; Zhang, L. Co-Estimation of State of Charge and State of Health for Lithium-Ion Batteries Based on Fractional-Order Calculus. IEEE Trans. Veh. Technol. 2018, 67, 10319–10329. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The Co-estimation of State of Charge, State of Health, and State of Function for Lithium-Ion Batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Hu, X.; Feng, F.; Liu, K.; Zhang, L.; Xie, J.; Liu, B. State estimation for advanced battery management: Key challenges and future trends. Renew. Sustain. Energy Rev. 2019, 114, 109334. [Google Scholar] [CrossRef]
- Kawahara, Y.; Sakabe, K.; Nakao, R.; Tsuru, K.; Okawa, K.; Aoshima, Y.; Kudo, A.; Emori, A. Development of status detection method of lithium-ion rechargeable battery for hybrid electric vehicles. J. Power Sources 2021, 481, 228760. [Google Scholar] [CrossRef]
- Wang, S.; Takyi-Aninakwa, P.; Fan, Y.; Yu, C.; Jin, S.; Fernandez, C.; Stroe, D.-I. A novel feedback correction-adaptive Kalman filtering method for the whole-life-cycle state of charge and closed-circuit voltage prediction of lithium-ion batteries based on the second-order electrical equivalent circuit model. Int. J. Electr. Power. 2022, 139, 108020. [Google Scholar] [CrossRef]
- Xiao, D.; Fang, G.; Liu, S.; Yuan, S.; Ahmed, R.; Habibi, S.; Emadi, A. Reduced-Coupling Coestimation of SOC and SOH for Lithium-Ion Batteries Based on Convex Optimization. IEEE Trans. Power Electron. 2020, 35, 12332–12346. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, D.; Yang, B.; Cui, X.; Li, X. Electrochemical model of lithium-ion battery for wide frequency range applications. Electrochim. Acta 2020, 343, 136094. [Google Scholar] [CrossRef]
- Yang, F.; Li, W.; Li, C.; Miao, Q. State-of-charge estimation of lithium-ion batteries based on gated recurrent neural network. Energy 2019, 175, 66–75. [Google Scholar] [CrossRef]
- Wang, S.-L.; Fernandez, C.; Zou, C.-Y.; Yu, C.-M.; Chen, L.; Zhang, L. A comprehensive working state monitoring method for power battery packs considering state of balance and aging correction. Energy 2019, 171, 444–455. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, G.; Li, X.; Chen, Z. A fractional-order model-based state estimation approach for lithium-ion battery and ultra-capacitor hybrid power source system considering load trajectory. J. Power Sources 2020, 449, 227543. [Google Scholar] [CrossRef]
- Song, Y.; Liu, D.; Liao, H.; Peng, Y. A hybrid statistical data-driven method for on-line joint state estimation of lithium-ion batteries. Appl. Energy 2020, 261, 114408. [Google Scholar] [CrossRef]
- Linghu, J.; Kang, L.; Liu, M.; Luo, X.; Feng, Y.; Lu, C. Estimation for state-of-charge of lithium-ion battery based on an adaptive high-degree cubature Kalman filter. Energy 2019, 189, 116204. [Google Scholar] [CrossRef]
- Liu, G.; Xu, C.; Li, H.; Jiang, K.; Wang, K. State of charge and online model parameters co-estimation for liquid metal batteries. Appl. Energy 2019, 250, 677–684. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, H.; Dong, G.; Wei, J.; Wu, J. Particle filter-based state-of-charge estimation and remaining-dischargeable-time prediction method for lithium-ion batteries. J. Power Sources 2019, 414, 158–166. [Google Scholar] [CrossRef]
- Feng, F.; Teng, S.; Liu, K.; Xie, J.; Xie, Y.; Liu, B.; Li, K. Co-estimation of lithium-ion battery state of charge and state of temperature based on a hybrid electrochemical-thermal-neural-network model. J. Power Sources 2020, 455, 227935. [Google Scholar] [CrossRef]
- Li, W.; Rentemeister, M.; Badeda, J.; Jost, D.; Schulte, D.; Sauer, D.U. Digital twin for battery systems: Cloud battery management system with online state-of-charge and state-of-health estimation. J. Energy Storage 2020, 30, 101557. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z. A framework for state-of-charge and remaining discharge time prediction using unscented particle filter. Appl. Energy 2020, 260, 114324. [Google Scholar] [CrossRef]
- Wei, Z.; Dong, G.; Zhang, X.; Pou, J.; Quan, Z.; He, H. Noise-Immune Model Identification and State-of-Charge Estimation for Lithium-Ion Battery Using Bilinear Parameterization. IEEE Trans. Ind. Electron. 2021, 68, 312–323. [Google Scholar] [CrossRef]
- Chen, Z.G.; Zhou, J.X.; Zhou, F.; Xu, S. State-of-charge estimation of lithium-ion batteries based on improved H in fi nity fi lter algorithm and its novel equalization method. J. Clean. Prod. 2021, 290, 15. [Google Scholar] [CrossRef]
- Ma, C.; Zhai, X.; Wang, Z.; Tian, M.; Yu, Q.; Liu, L.; Liu, H.; Wang, H.; Yang, X. State of health prediction for lithium-ion batteries using multiple-view feature fusion and support vector regression ensemble. Int. J. Mach. Learn. Cybern. 2019, 10, 2269–2282. [Google Scholar] [CrossRef]
- Ungurean, L.; Micea, M.V.; Cârstoiu, G. Online state of health prediction method for lithium-ion batteries, based on gated recurrent unit neural networks. Int. J. Energy Res. 2020, 44, 6767–6777. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Z.; Xiong, Q.; Ding, B.; Hou, J.; Luo, D.; Rong, Y.; Li, S. State-of-health estimation and remaining useful life prediction for the lithium-ion battery based on a variant long short term memory neural network. J. Power Sources 2020, 459, 228069. [Google Scholar] [CrossRef]
- He, L.; Yang, Z.; Gu, Y.; Liu, C.; He, T.; Shin, K.G. SoH-Aware Reconfiguration in Battery Packs. IEEE Trans. Smart Grid 2018, 9, 3727–3735. [Google Scholar] [CrossRef]
- He, J.; Wei, Z.; Bian, X.; Yan, F. State-of-Health Estimation of Lithium-Ion Batteries Using Incremental Capacity Analysis Based on Voltage–Capacity Model. IEEE Trans. Transp. Electrif. 2020, 6, 417–426. [Google Scholar] [CrossRef]
- Lajara, R.; Pérez-Solano, J.J.; Pelegrí-Sebastiá, J. Predicting the Batteries’ State of Health in Wireless Sensor Networks Applications. IEEE Trans. Ind. Electron. 2018, 65, 8936–8945. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W. State-of-Health Estimation Based on Differential Temperature for Lithium Ion Batteries. IEEE Trans. Power Electron. 2020, 35, 10363–10373. [Google Scholar] [CrossRef]
- Dong, G.; Chen, Z.; Wei, J.; Ling, Q. Battery Health Prognosis Using Brownian Motion Modeling and Particle Filtering. IEEE Trans. Ind. Electron. 2018, 65, 8646–8655. [Google Scholar] [CrossRef]
- Stroe, D.; Schaltz, E. Lithium-Ion Battery State-of-Health Estimation Using the Incremental Capacity Analysis Technique. IEEE Trans. Ind. Appl. 2020, 56, 678–685. [Google Scholar] [CrossRef]
- Guha, A.; Patra, A. State of Health Estimation of Lithium-Ion Batteries Using Capacity Fade and Internal Resistance Growth Models. IEEE Trans. Transp. Electrif. 2018, 4, 135–146. [Google Scholar] [CrossRef]
- Leijen, P.; Steyn-Ross, D.A.; Kularatna, N. Use of Effective Capacitance Variation as a Measure of State-of-Health in a Series-Connected Automotive Battery Pack. IEEE Trans. Veh. Technol. 2018, 67, 1961–1968. [Google Scholar] [CrossRef] [Green Version]
- Hametner, C.; Jakubek, S.; Prochazka, W. Data-Driven Design of a Cascaded Observer for Battery State of Health Estimation. IEEE Trans. Ind. Appl. 2018, 54, 6258–6266. [Google Scholar] [CrossRef]
- Ma, Z.; Gao, F.; Gu, X.; Li, N.; Wu, Q.; Wang, X.; Wang, X. Multilayer SOH Equalization Scheme for MMC Battery Energy Storage System. IEEE Trans. Power Electron. 2020, 35, 13514–13527. [Google Scholar] [CrossRef]
- Dai, H.D.; Zhao, G.C.; Lin, M.Q.; Wu, J.; Zheng, G.F. A Novel Estimation Method for the State of Health of Lithium-Ion Battery Using Prior Knowledge-Based Neural Network and Markov Chain. IEEE Trans. Ind. Electron. 2019, 66, 7706–7716. [Google Scholar] [CrossRef]
- Mawonou, K.S.R.; Eddahech, A.; Dumur, D.; Beauvois, D.; Godoy, E. State-of-health estimators coupled to a random forest approach for lithium-ion battery aging factor ranking. J. Power Sources 2021, 484, 229154. [Google Scholar] [CrossRef]
- Zhou, D.; Zheng, W.; Chen, S.; Fu, P.; Zhu, H.; Song, B.; Qu, X.; Wang, T. Research on state of health prediction model for lithium batteries based on actual diverse data. Energy 2021, 230, 120851. [Google Scholar] [CrossRef]
- Chen, W.; Xu, C.; Chen, M.; Jiang, K.; Wang, K. A novel fusion model based online state of power estimation method for lithium-ion capacitor. J. Energy Storage 2021, 36, 102387. [Google Scholar] [CrossRef]
- Esfandyari, M.J.; Esfahanian, V.; Yazdi, M.R.H.; Nehzati, H.; Shekoofa, O. A new approach to consider the influence of aging state on Lithium-ion battery state of power estimation for hybrid electric vehicle. Energy 2019, 176, 505–520. [Google Scholar] [CrossRef]
- Esfandyari, M.J.; Yazdi, M.R.H.; Esfahanian, V.; Masih-Tehrani, M.; Nehzati, H.; Shekoofa, O. A hybrid model predictive and fuzzy logic based control method for state of power estimation of series-connected Lithium-ion batteries in HEVs. J. Energy Storage 2019, 24, 100758. [Google Scholar] [CrossRef]
- Tang, X.; Wang, Y.; Yao, K.; He, Z.; Gao, F. Model migration based battery power capability evaluation considering uncertainties of temperature and aging. J. Power Sources 2019, 440, 227141. [Google Scholar] [CrossRef]
- Takyi-Aninakwa, P.; Wang, S.; Zhang, H.; Appiah, E.; Bobobee, E.D.; Fernandez, C. A strong tracking adaptive fading-extended Kalman filter for the state of charge estimation of lithium-ion batteries. Int. J. Energy Res. 2022, 47, 1–18. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, H.; Feng, F.; Liu, B. An enhanced multi-state estimation hierarchy for advanced lithium-ion battery management. Appl. Energy 2020, 257, 114019. [Google Scholar] [CrossRef]
- Verma, M.K.S.; Basu, S.; Patil, R.S.; Hariharan, K.S.; Adiga, S.P.; Kolake, S.M.; Oh, D.; Song, T.; Sung, Y. On-Board State Estimation in Electrical Vehicles: Achieving Accuracy and Computational Efficiency Through an Electrochemical Model. IEEE Trans. Veh. Technol. 2020, 69, 2563–2575. [Google Scholar] [CrossRef]
- Lai, X.; He, L.; Wang, S.; Zhou, L.; Zhang, Y.; Sun, T.; Zheng, Y. Co-estimation of state of charge and state of power for lithium-ion batteries based on fractional variable-order model. J. Clean. Prod. 2020, 255, 120203. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, J.; Sun, Z.; Wang, L.; Xu, R.; Li, M.; Chen, Z. A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems. Renew. Sustain. Energy Rev. 2020, 131, 110015. [Google Scholar] [CrossRef]
- Lin, P.; Jin, P.; Hong, J.; Wang, Z. Battery voltage and state of power prediction based on an improved novel polarization voltage model. Energy Rep. 2020, 6, 2299–2308. [Google Scholar] [CrossRef]
- Shrivastava, P.; Soon, T.K.; Bin Idris, M.Y.I.; Mekhilef, S.; Adnan, S.B.R.S. Model-based state of X estimation of lithium-ion battery for electric vehicle applications. Int. J. Energy Res. 2022, 46, 10704–10723. [Google Scholar] [CrossRef]
- Zhou, W.; Zhang, N.; Zhai, H. Enhanced Battery Power Constraint Handling in MPC-Based HEV Energy Management: A Two-Phase Dual-Model Approach. IEEE Trans. Transp. Electrif. 2021, 7, 1236–1248. [Google Scholar] [CrossRef]
- Tang, X.; Liu, K.; Liu, Q.; Peng, Q.; Gao, F. Comprehensive study and improvement of experimental methods for obtaining referenced battery state-of-power. J. Power Sources 2021, 512, 230462. [Google Scholar] [CrossRef]
- An, F.; Jiang, J.; Zhang, W.; Zhang, C.; Fan, X. State of Energy Estimation for Lithium-Ion Battery Pack via Prediction in Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2022, 71, 184–195. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, X.; Luo, D.; Wen, R. Remaining available energy prediction for lithium-ion batteries considering electrothermal effect and energy conversion efficiency. J. Energy Storage 2021, 40, 102728. [Google Scholar] [CrossRef]
- Ezemobi, E.; Silvagni, M.; Mozaffari, A.; Tonoli, A.; Khajepour, A. State of Health Estimation of Lithium-Ion Batteries in Electric Vehicles under Dynamic Load Conditions. Energies 2022, 15, 1234. [Google Scholar] [CrossRef]
- Lai, X.; Huang, Y.; Han, X.; Gu, H.; Zheng, Y. A novel method for state of energy estimation of lithium-ion batteries using particle filter and extended Kalman filter. J. Energy Storage 2021, 43, 103269. [Google Scholar] [CrossRef]
- Shrivastava, P.; Kok Soon, T.; Bin Idris, M.Y.I.; Mekhilef, S.; Adnan, S.B.R.S. Combined State of Charge and State of Energy Estimation of Lithium-Ion Battery Using Dual Forgetting Factor-Based Adaptive Extended Kalman Filter for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2021, 70, 1200–1215. [Google Scholar] [CrossRef]
- Tang, D.Y.; Gong, M.T.; Yu, J.S.; Li, X. A power transfer model-based method for lithium-ion battery discharge time prediction of electric rotatory-wing UAV. Microelectron. Reliab. 2020, 114, 113832. [Google Scholar] [CrossRef]
- Wei, X.; Jun, C.; Yu, G.; Ma, J.M.; Chang, J. Unscented Particle Filter Based State of Energy Estimation for LiFePO4 Batteries Using an Online Updated Model. Int. J. Automot. Technol. 2022, 23, 503–510. [Google Scholar] [CrossRef]
- Zhang, S.; Peng, N.; Zhang, X. An application-oriented multistate estimation framework of lithium-ion battery used in electric vehicles. Int. J. Energy Res. 2021, 45, 18554–18576. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, X. Joint estimation method for maximum available energy and state-of-energy of lithium-ion battery under various temperatures. J. Power Sources 2021, 506, 230132. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, X. A novel low-complexity state-of-energy estimation method for series-connected lithium-ion battery pack based on “representative cell” selection and operating mode division. J. Power Sources 2022, 518, 230732. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, X. A novel non-experiment-based reconstruction method for the relationship between open-circuit-voltage and state-of-charge/state-of-energy of lithium-ion battery. Electrochim. Acta 2022, 403, 139637. [Google Scholar] [CrossRef]
- Huang, Y.; Tang, Y.; VanZwieten, J. Prognostics With Variational Autoencoder by Generative Adversarial Learning. IEEE Trans. Ind. Electron. 2022, 69, 856–867. [Google Scholar] [CrossRef]
- Khaleghi, S.; Hosen, M.S.; Karimi, D.; Behi, H.; Beheshti, S.H.; Van Mierlo, J.; Berecibar, M. Developing an online data-driven approach for prognostics and health management of lithium-ion batteries. Appl. Energy 2022, 308, 118348. [Google Scholar] [CrossRef]
- Lin, C.P.; Ling, M.H.; Cabrera, J.; Yang, F.; Yu, D.Y.W.; Tsui, K.L. Prognostics for lithium-ion batteries using a two-phase gamma degradation process model. Reliab. Eng. Syst. Saf. 2021, 214, 107797. [Google Scholar] [CrossRef]
- Nagulapati, V.M.; Lee, H.; Jung, D.; Brigljevic, B.; Choi, Y.; Lim, H. Capacity estimation of batteries: Influence of training dataset size and diversity on data driven prognostic models. Reliab. Eng. Syst. Saf. 2021, 216, 108048. [Google Scholar] [CrossRef]
- Weddington, J.; Niu, G.; Chen, R.; Yan, W.; Zhang, B. Lithium-ion battery diagnostics and prognostics enhanced with Dempster-Shafer decision fusion. Neurocomputing 2021, 458, 440–453. [Google Scholar] [CrossRef]
- Yang, Y. A machine-learning prediction method of lithium-ion battery life based on charge process for different applications. Appl. Energy 2021, 292, 116897. [Google Scholar] [CrossRef]
- Camargos, M.O.; Bessa, I.; Silveira Vasconcelos D’Angelo, M.F.; Cosme, L.B.; Palhares, R.M. Data-driven prognostics of rolling element bearings using a novel Error Based Evolving Takagi-Sugeno Fuzzy Model. Appl. Soft Comput. 2020, 96, 106628. [Google Scholar] [CrossRef]
- Dong, G.; Yang, F.; Wei, Z.; Wei, J.; Tsui, K.-L. Data-Driven Battery Health Prognosis Using Adaptive Brownian Motion Model. IEEE Trans. Ind. Inform. 2020, 16, 4736–4746. [Google Scholar] [CrossRef]
- Li, X.; Huang, Z.; Tian, J.; Tian, Y. State-of-charge estimation tolerant of battery aging based on a physics-based model and an adaptive cubature Kalman filter. Energy 2021, 220, 119767. [Google Scholar] [CrossRef]
- Lin, C.P.; Cabrera, J.; Yang, F.F.; Ling, M.H.; Tsui, K.L.; Bae, S.J. Battery state of health modeling and remaining useful life prediction through time series model. Appl. Energy 2020, 275, 115338. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Xiong, R.; He, H.W.; Qu, X.B.; Pecht, M. State of charge-dependent aging mechanisms in graphite/Li(NiCoAl)O2 cells: Capacity loss modeling and remaining useful life prediction. Appl. Energy 2019, 255, 113818. [Google Scholar] [CrossRef]
- Zhao, Y.; Stein, P.; Bai, Y.; Al-Siraj, M.; Yang, Y.Y.W.; Xu, B.X. A review on modeling of electro-chemo-mechanics in lithium-ion batteries. J. Power Sources 2019, 413, 259–283. [Google Scholar] [CrossRef]
- Zhu, J.G.; Knapp, M.; Darma, M.S.D.; Fang, Q.H.; Wang, X.Y.; Dai, H.F.; Wei, X.Z.; Ehrenberg, H. An improved electro-thermal battery model complemented by current dependent parameters for vehicular low temperature application. Appl. Energy 2019, 248, 149–161. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. Comparative study of reduced order equivalent circuit models for on-board state-of-available-power prediction of lithium-ion batteries in electric vehicles. Appl. Energy 2018, 225, 1102–1122. [Google Scholar] [CrossRef]
- Yang, X.; Wang, S.; Xu, W.; Qiao, J.; Yu, C.; Takyi-Aninakwa, P.; Jin, S. A novel fuzzy adaptive cubature Kalman filtering method for the state of charge and state of energy co-estimation of lithium-ion batteries. Electrochim. Acta 2022, 415, 140241. [Google Scholar] [CrossRef]
- Liu, K.L.; Ashwin, T.R.; Hu, X.S.; Lucu, M.; Widanage, W.D. An evaluation study of different modelling techniques for calendar ageing prediction of lithium-ion batteries. Renew. Sustain. Energy Rev. 2020, 131, 110017. [Google Scholar] [CrossRef]
- Qiao, J.; Wang, S.; Yu, C.; Yang, X.; Fernandez, C. A novel intelligent weight decreasing firefly–particle filtering method for accurate state-of-charge estimation of lithium-ion batteries. Int. J. Energy Res. 2022, 46, 6613–6622. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Xiong, R.; He, H.W.; Pecht, M.G. Long Short-Term Memory Recurrent Neural Network for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 5695–5705. [Google Scholar] [CrossRef]
- Zhao, R.X.; Kollmeyer, P.J.; Lorenz, R.D.; Jahns, T.M. A Compact Methodology Via a Recurrent Neural Network for Accurate Equivalent Circuit Type Modeling of Lithium-Ion Batteries. IEEE Trans. Ind. Appl. 2019, 55, 1922–1931. [Google Scholar] [CrossRef]
- Chehade, A.A.; Hussein, A.A. A Collaborative Gaussian Process Regression Model for Transfer Learning of Capacity Trends Between Li-Ion Battery Cells. IEEE Trans. Veh. Technol. 2020, 69, 9542–9552. [Google Scholar] [CrossRef]
- Du, J.; Liu, Y.; Mo, X.; Li, Y.; Li, J.; Wu, X.; Ouyang, M. Impact of high-power charging on the durability and safety of lithium batteries used in long-range battery electric vehicles. Appl. Energy 2019, 255, 113793. [Google Scholar] [CrossRef]
- Eleftheroglou, N.; Mansouri, S.S.; Loutas, T.; Karvelis, P.; Georgoulas, G.; Nikolakopoulos, G.; Zarouchas, D. Intelligent data-driven prognostic methodologies for the real-time remaining useful life until the end-of-discharge estimation of the Lithium-Polymer batteries of unmanned aerial vehicles with uncertainty quantification. Appl. Energy 2019, 254, 113677. [Google Scholar] [CrossRef]
- Li, X.Y.; Yuan, C.G.; Wang, Z.P. Multi-time-scale framework for prognostic health condition of lithium battery using modified Gaussian process regression and nonlinear regression. J. Power Sources 2020, 467, 228358. [Google Scholar] [CrossRef]
- Liu, K.L.; Hu, X.S.; Wei, Z.B.; Li, Y.; Jiang, Y. Modified Gaussian Process Regression Models for Cyclic Capacity Prediction of Lithium-Ion Batteries. IEEE Trans. Transp. Electrif. 2019, 5, 1225–1236. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Hoque, M.M.; Ker, P.J.; Saad, M.H.M.; Ayob, A. A review of state of health and remaining useful life estimation methods for lithium-ion battery in electric vehicles: Challenges and recommendations. J. Clean. Prod. 2018, 205, 115–133. [Google Scholar] [CrossRef]
- Xiong, R.; Pan, Y.; Shen, W.; Li, H.; Sun, F. Lithium-ion battery aging mechanisms and diagnosis method for automotive applications: Recent advances and perspectives. Renew. Sustain. Energy Rev. 2020, 131, 110048. [Google Scholar] [CrossRef]
- Yin, L.F.; Gao, Q.; Zhao, L.L.; Wang, T. Expandable deep learning for real-time economic generation dispatch and control of three-state energies based future smart grids. Energy 2020, 191, 116561. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, X.; Zhang, X. Multi-objective decision analysis for data-driven based estimation of battery states: A case study of remaining useful life estimation. Int. J. Hydrogen Energy 2020, 45, 14156–14173. [Google Scholar] [CrossRef]
- Hafiz, F.; Awal, M.A.; de Queiroz, A.R.; Husain, I. Real-Time Stochastic Optimization of Energy Storage Management Using Deep Learning-Based Forecasts for Residential PV Applications. IEEE Trans. Ind. Appl. 2020, 56, 2216–2226. [Google Scholar] [CrossRef]
- Lan, T.; Jermsittiparsert, K.; Alrashood, S.T.; Rezaei, M.; Al-Ghussain, L.; Mohamed, M.A. An advanced machine learning based energy management of renewable microgrids considering hybrid electric vehicles’ charging demand. Energies 2021, 14, 569. [Google Scholar] [CrossRef]
- Lee, C.; Jo, S.; Kwon, D.; Pecht, M.G. Capacity-Fading Behavior Analysis for Early Detection of Unhealthy Li-Ion Batteries. IEEE Trans. Ind. Electron. 2021, 68, 2659–2666. [Google Scholar] [CrossRef]
- Lin, K.; Chen, Y.; Liu, Y.; Zhang, B. Reliability Prediction of Battery Management System for Electric Vehicles Based on Accelerated Degradation Test: A Semi-Parametric Approach. IEEE Trans. Veh. Technol. 2020, 69, 12694–12704. [Google Scholar] [CrossRef]
- Liu, J.; Jia, R.; Li, W.; Ma, F.; Abdullah, H.M.; Ma, H.; Mohamed, M.A. High precision detection algorithm based on improved RetinaNet for defect recognition of transmission lines. Energy Rep. 2020, 6, 2430–2440. [Google Scholar] [CrossRef]
- Meng, F.; Zou, Q.; Zhang, Z.; Wang, B.; Ma, H.; Abdullah, H.M.; Almalaq, A.; Mohamed, M.A. An intelligent hybrid wavelet-adversarial deep model for accurate prediction of solar power generation. Energy Rep. 2021, 7, 2155–2164. [Google Scholar] [CrossRef]
- Ng, M.F.; Zhao, J.; Yan, Q.Y.; Conduit, G.J.; Seh, Z.W. Predicting the state of charge and health of batteries using data-driven machine learning. Nat. Mach. Intell. 2020, 2, 161–170. [Google Scholar] [CrossRef] [Green Version]
- Shen, S.; Sadoughi, M.; Li, M.; Wang, Z.D.; Hu, C. Deep convolutional neural networks with ensemble learning and transfer learning for capacity estimation of lithium-ion batteries. Appl. Energy 2020, 260, 114296. [Google Scholar] [CrossRef]
- Shin, M.; Kim, J.; Levorato, M. Auction-Based Charging Scheduling With Deep Learning Framework for Multi-Drone Networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef] [Green Version]
- Tagade, P.; Hariharan, K.S.; Ramachandran, S.; Khandelwal, A.; Naha, A.; Kolake, S.M.; Han, S.H. Deep Gaussian process regression for lithium-ion battery health prognosis and degradation mode diagnosis. J. Power Sources 2020, 445, 227281. [Google Scholar] [CrossRef]
- Tian, H.X.; Qin, P.L.; Li, K.; Zhao, Z. A review of the state of health for lithium -ion batteries: Research status and suggestions. J. Clean. Prod. 2020, 261, 120813. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, L.; Li, Q.S.; Fu, Z.Y.; Zhu, W.W.; Zhang, Y.X. Enabling Flexible Resource Allocation in Mobile Deep Learning Systems. IEEE Trans. Parallel Distrib. Syst. 2019, 30, 346–360. [Google Scholar] [CrossRef]
- Xu, T.; Peng, Z.; Wu, L. A novel data-driven method for predicting the circulating capacity of lithium-ion battery under random variable current. Energy 2021, 218, 119530. [Google Scholar] [CrossRef]
- Zhang, Y.W.; Tang, Q.C.; Zhang, Y.; Wang, J.B.; Stimming, U.; Lee, A.A. Identifying degradation patterns of lithium ion batteries from impedance spectroscopy using machine learning. Nat. Commun. 2020, 11, 1706. [Google Scholar] [CrossRef]
- Zou, H.; Tao, J.; Elsayed, S.K.; Elattar, E.E.; Almalaq, A.; Mohamed, M.A. Stochastic multi-carrier energy management in the smart islands using reinforcement learning and unscented transform. Int. J. Electr. Power Energy Syst. 2021, 130, 106988. [Google Scholar] [CrossRef]
- Anseán, D.; García, V.M.; González, M.; Blanco-Viejo, C.; Viera, J.C.; Pulido, Y.F.; Sánchez, L. Lithium-Ion Battery Degradation Indicators Via Incremental Capacity Analysis. IEEE Trans. Ind. Appl. 2019, 55, 2992–3002. [Google Scholar] [CrossRef]
- Chen, L.; Wang, H.M.; Liu, B.H.; Wang, Y.J.; Ding, Y.H.; Pan, H.H. Battery state-of-health estimation based on a metabolic extreme learning machine combining degradation state model and error compensation. Energy 2021, 215, 119078. [Google Scholar] [CrossRef]
- Corno, M.; Pozzato, G. Active Adaptive Battery Aging Management for Electric Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 258–269. [Google Scholar] [CrossRef]
- Finegan, D.P.; Zhu, J.; Feng, X.; Keyser, M.; Ulmefors, M.; Li, W.; Bazant, M.Z.; Cooper, S.J. The Application of Data-Driven Methods and Physics-Based Learning for Improving Battery Safety. Joule 2020, 5, 316–329. [Google Scholar] [CrossRef]
- Li, W.H.; Sengupta, N.; Dechent, P.; Howey, D.; Annaswamy, A.; Sauer, D.U. Online capacity estimation of lithium-ion batteries with deep long short-term memory networks. J. Power Sources 2021, 482, 228863. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Liu, X.; Wang, Y.; Zhang, L. Lithium-ion battery capacity estimation—A pruned convolutional neural network approach assisted with transfer learning. Appl. Energy 2021, 285, 116410. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | RMSE (%) | MaxE (%) | Convergence Speed (s) | Accuracy (%) |
|---|---|---|---|---|
| Extreme learning machine (ELM) | - | - | - | 94.20 |
| Deep convolutional neural network (DCNN) | 1.986 | 6.838 | 14.138 s | - |
| Deep neural network (DNN) | 1.59 | 7.14 | - | - |
| Recurrent neural network (RNN) | 6.87 | 37.92 | - | - |
| DCNN with ensemble transfer learning (DCNN-ETL) | 1.114 | 5.487 | 133.924 | - |
| DCNN with ensemble learning (DCNN-EL) | 3.539 | 16.798 | 144.583 | - |
| DCNN with transfer learning (DCNN-TL) | 1.361 | 2.452 | 12.294 | - |
| Adaptive LSTM (ALSTM) | - | - | 46.847 | 93.12 |
| ALSTM with an attention mechanism | - | - | 26.701 | 97.22 |
| Average Euclidean distance-stacked denoising autoencoder (AED-SDA) | - | - | - | 92.40 |
| Gated recurrent unit-Gaussian process regression (GRU-GPR) | 0.79 | 7.92 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Ren, P.; Takyi-Aninakwa, P.; Jin, S.; Fernandez, C. A Critical Review of Improved Deep Convolutional Neural Network for Multi-Timescale State Prediction of Lithium-Ion Batteries. Energies 2022, 15, 5053. https://doi.org/10.3390/en15145053
Wang S, Ren P, Takyi-Aninakwa P, Jin S, Fernandez C. A Critical Review of Improved Deep Convolutional Neural Network for Multi-Timescale State Prediction of Lithium-Ion Batteries. Energies. 2022; 15(14):5053. https://doi.org/10.3390/en15145053
Chicago/Turabian StyleWang, Shunli, Pu Ren, Paul Takyi-Aninakwa, Siyu Jin, and Carlos Fernandez. 2022. "A Critical Review of Improved Deep Convolutional Neural Network for Multi-Timescale State Prediction of Lithium-Ion Batteries" Energies 15, no. 14: 5053. https://doi.org/10.3390/en15145053