In order to enhance the global search ability and prevent a premature solution, the Taguchi method was applied to optimize the parameters and population of the particle swarm optimization (PSO).
3.3.1. Strategy for Parameter Tunning
Compared with other optimization algorithms, particle swarm optimization (PSO) has the advantage of fewer adjustment parameters. These parameters directly affect the performance and convergence of the particle swarm optimization (PSO), so the parameter setting is very important. At present, many methods are available to improve the parameters of the particle swarm optimization (PSO). For different optimization problems, various improvement methods have their own advantages. In addition, for a specific optimization problem, the improvement method to be adopted to obtain the best result is an issue that needs to be considered.
(a) Inertia weight
The inertia weight keeps the particle inertia in motion, so that the particle has a tendency to expand the search space and has the ability to explore new areas. A large inertial weight has strong global search capability, but the search efficiency is low. A small inertial weight has strong local search capability, but is easily trapped in a local optimum. Setting a reasonable inertia weight is the key to improving the performance of the particle swarm optimization (PSO). In this paper, the linearly decreasing inertia weight (LDIW) is applied, as shown in Equation (9):
where
and
are the maximum and minimum inertia weights, respectively.
is the current iteration number, and
is the maximum number of iterations.
(b) Acceleration coefficient
The acceleration coefficients
and
are used to adjust the maximum step length of particles flying towards the best individual position and the best global position, respectively. They determine the influence of particles’ own experience and group experience on the trajectory of particles, reflecting the information exchange between particles. If
= 0, the particles lack self-cognition ability and only have group experience. The convergence speed is fast. For complex problems, particle swarm optimization (PSO) is easily trapped in a local optimum. If
= 0, the particles only have their own experience, and there is no information exchange between individuals. The possibility of particle swarm optimization (PSO) obtaining the optimal solution is very small. In [
18], sine cosine acceleration coefficients (SCAC) were introduced to efficiently control the local search ability and global search ability.
where
and
are constant.
(c) Population size
When the population size is too small, the running time is short, but the global search capability is weak. As the population size increases, the search space becomes larger, and particle swarm optimization (PSO) can more easily find the global optimal solution. At the same time, the running time is longer. Therefore, it is necessary to comprehensively consider the optimization effect and running time.
The Taguchi method is a powerful tool for parameter design, which determines the best parameter setting with the least number of experiments. Therefore, an improved particle swarm optimization (PSO) based on the Taguchi method was developed, which selects the parameters of inertia weight, acceleration coefficients, and population size. In this paper, the
orthogonal array is chosen to optimize the parameters, as shown in
Table 1.
The orthogonal array has 5 factors, namely the maximum inertia weight , the minimum inertia weight , the two constants and of the acceleration coefficient, and the population size . Each factor has 4 levels. If the Full-Factorial Experiment is performed, 1024 experiments are required to determine the optimal parameter combination. The Taguchi orthogonal array only needs 16 experiments to obtain the optimal parameter combination. According to the parameters of each group of experiments mentioned above, the particle swarm optimization algorithm was run independently several times, and the experimental results, namely, the fitness function values of the particle swarm optimization algorithm, were recorded. The SNR of each group of experiments was obtained according to the SNR calculation in Formula (9), of the desired small characteristic, and the factor reaction table/graph was drawn, so as to obtain the best parameter combination scheme.
3.3.2. Strategy for Population Optimization
As the number of iterations increases, the population of the particle swarm optimization algorithm (PSO) tends to be similar. As a result, the algorithm searches repeatedly in the solution space of the local optimal solution of the optimization problem, and cannot fully search other solution spaces. In order to improve the diversity of the population of a random sample after the completion of two particles, the Taguchi method is used to extract the best factors in the extraction of the particle and to generate new particles. New particles and extracted particles are compared, and, if a better alternative to the extracted particles is found, the individual extremum and global extremum are updated for the next iteration. In order to obtain better optimization results, particles can also be randomly selected from individual extreme values after each population update. The other steps are the same. This paper uses several common mathematical functions, including Sphere, Rosenbrock, Rastrigin, and Griewank functions, to verify the two population optimization strategies mentioned above.
For these four common mathematical functions, the optimal target value is 0, and their respective function expressions and search ranges are shown in
Table 2. Parameters of the particle swarm optimization (PSO) are set as follows: the maximum number of iterations is set to 2000, the population size is set to 60, the inertia weight is set to 0.729, the learning factor is set to 2, the dimension of each function is set to 20, and each function runs independently for 50 times.
Therefore, the experiments were carried out according to the above parameters, and the convergence precision of each function under different population optimization strategies is shown in
Table 3.
The above table shows that the algorithm of extracting particles from individual extreme values under the same conditions has better performance; thus, this paper adopts this population optimization strategy. In order to more clearly demonstrate the optimization process of the Taguchi method on the particle swarm optimization algorithm population, an
orthogonal table was selected for a simple demonstration, as shown in
Table 4. The rows in the orthogonal table represent the experimental order (1–8), which represent the newly generated particles, and the columns represent the factors (A–G), which represent the dimension of the particles. Each factor has two levels: 1, representing the dimensions of the corresponding particle from the extracted particle; and 2, representing the dimensions of the corresponding particle from the extracted particle.
The Taguchi method is implemented after each population update. The specific steps are as follows:
(1) Two particles are randomly selected from the individual extremum of the current population and denoted and ;
(2) The relevant dimensions of the extracted particles and are allocated according to the above orthogonal table, so as to generate 8 new particles. The value 1 means from , 2 means from ;
(3) The fitness value of each new particle in the orthogonal table is calculated, denoted ;
(4) Each factor is evaluated according to the formula below:
For example, for level 1 of factor B, there is . For level 2 of factor B, there is ;
(5) The factors are horizontally assigned to the optimal particle according to the following rules. For example: < , the level value (dimension value) corresponding to the B factor (dimension value) of the particle is assigned to the optimal particle . This continues, to generate an optimal particle and calculate its fitness value;
(6) If the optimal particle is better than the two selected particles and , the poorer particle is replaced and the global optimal value of the population is updated;
(7) The next iteration is continued until the maximum number of iterations is met.
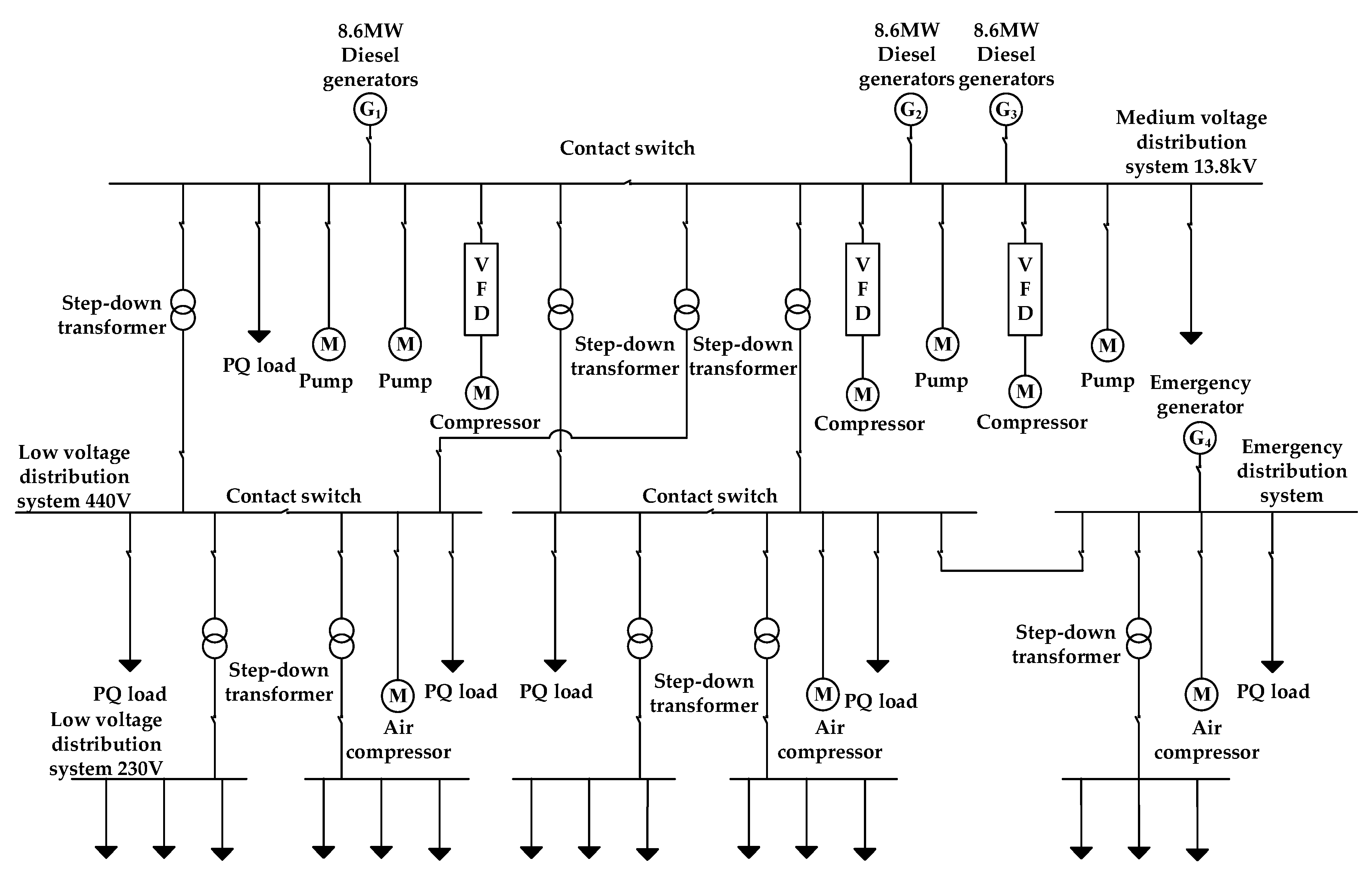
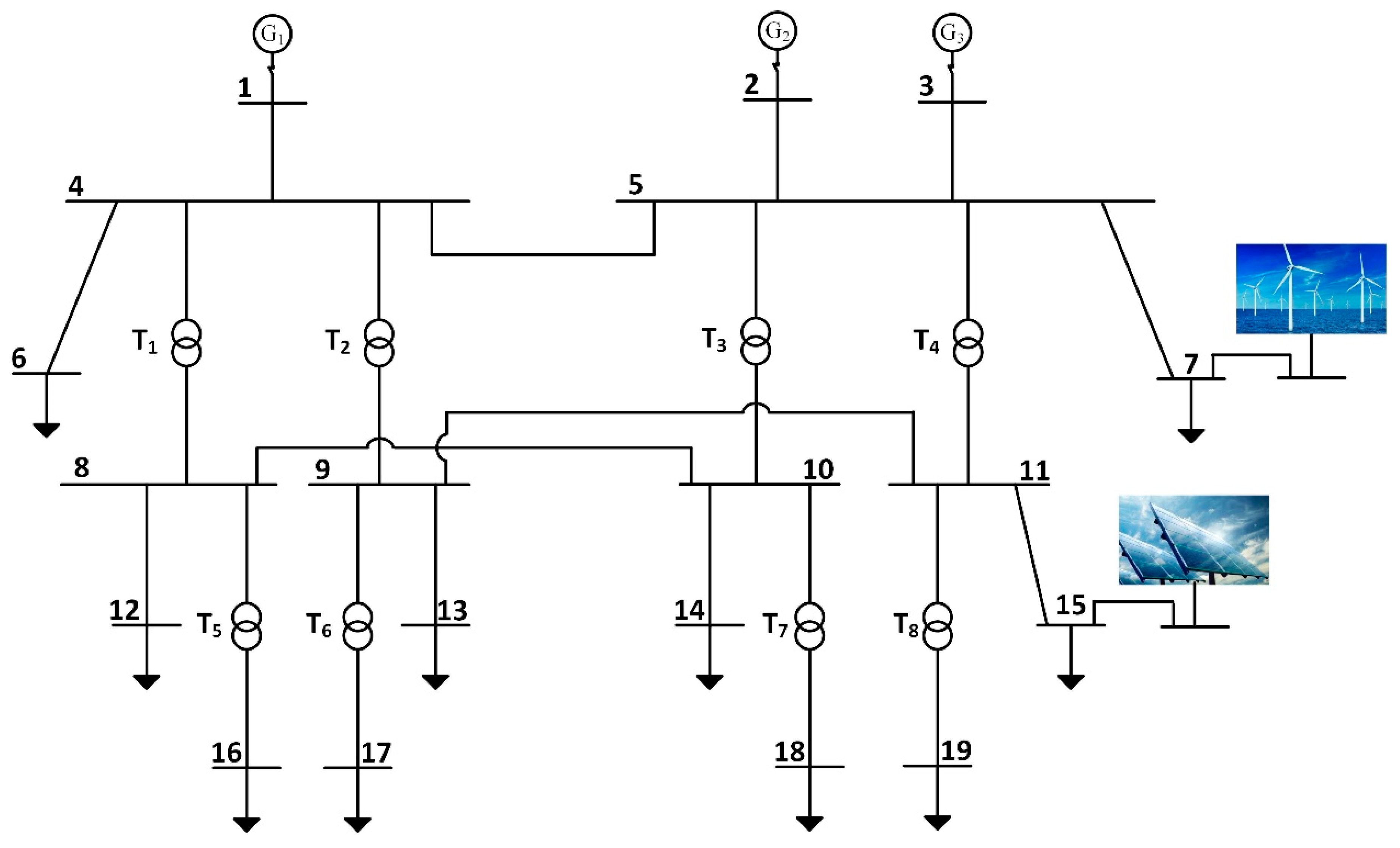
The selection of the orthogonal table should be chosen according to the actual optimization problem. For example, for the deep-water semi-submersible production platform with new energy sources, there are 13 control variables; that is, the particle dimension is 13, and the first 13 columns of the orthogonal table can be selected.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}