
Robust Design of Dual-Input Power System Stabilizer Using Chaotic JAYA Algorithm



Abstract
:1. Introduction
- To investigate the performance of C-JAYA in designing PSS.
- To demonstrate the robustness of a dual-input PSS structure.
- To study the potential benefit of C-JAYA compared to the original JAYA, PSO and cuckoo search techniques.
- To show the efficacy of the suggested C-JAYAPSS controller over an extended range of loading conditions.
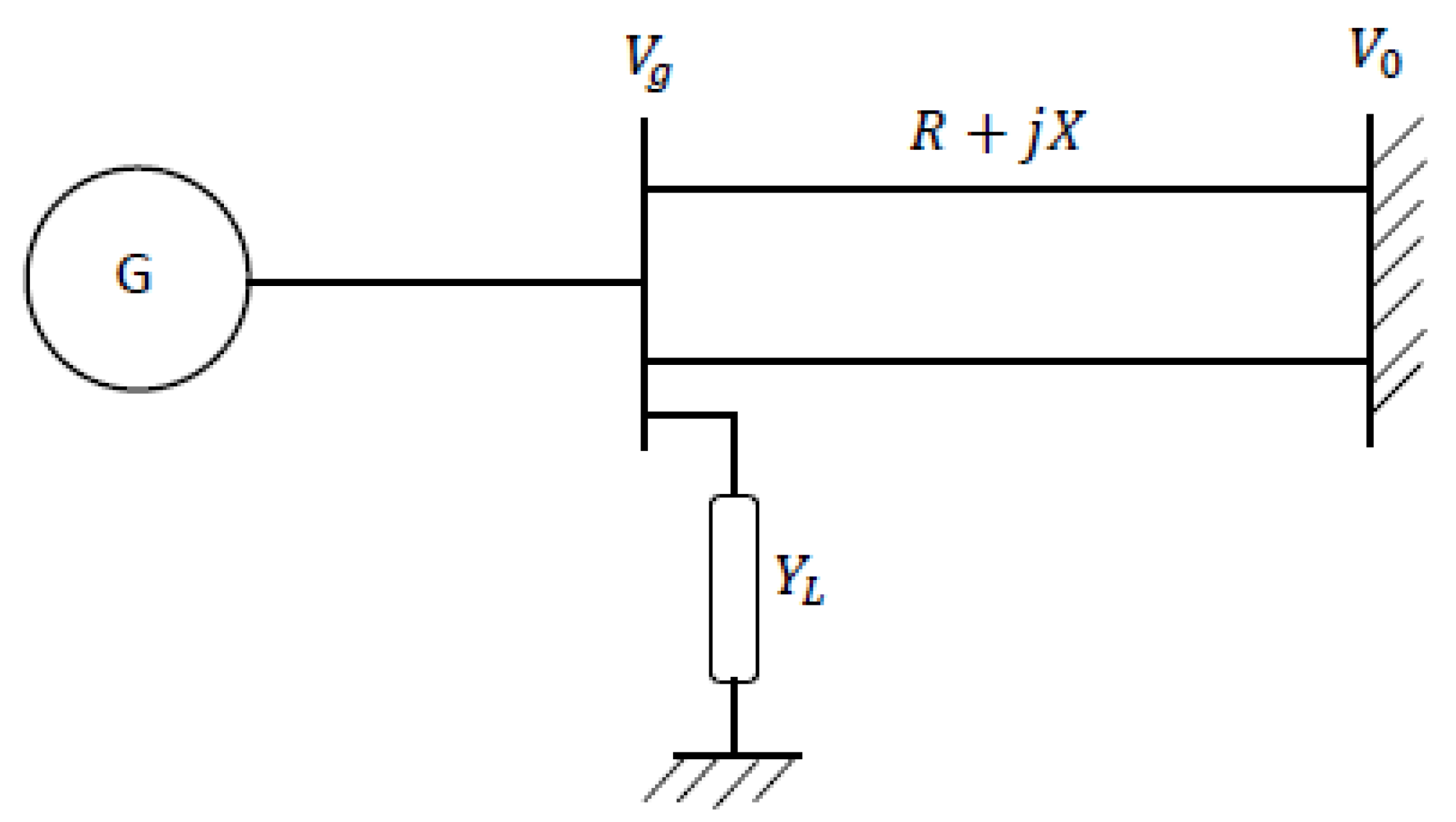
2. Mathematical Model
2.1. Generator
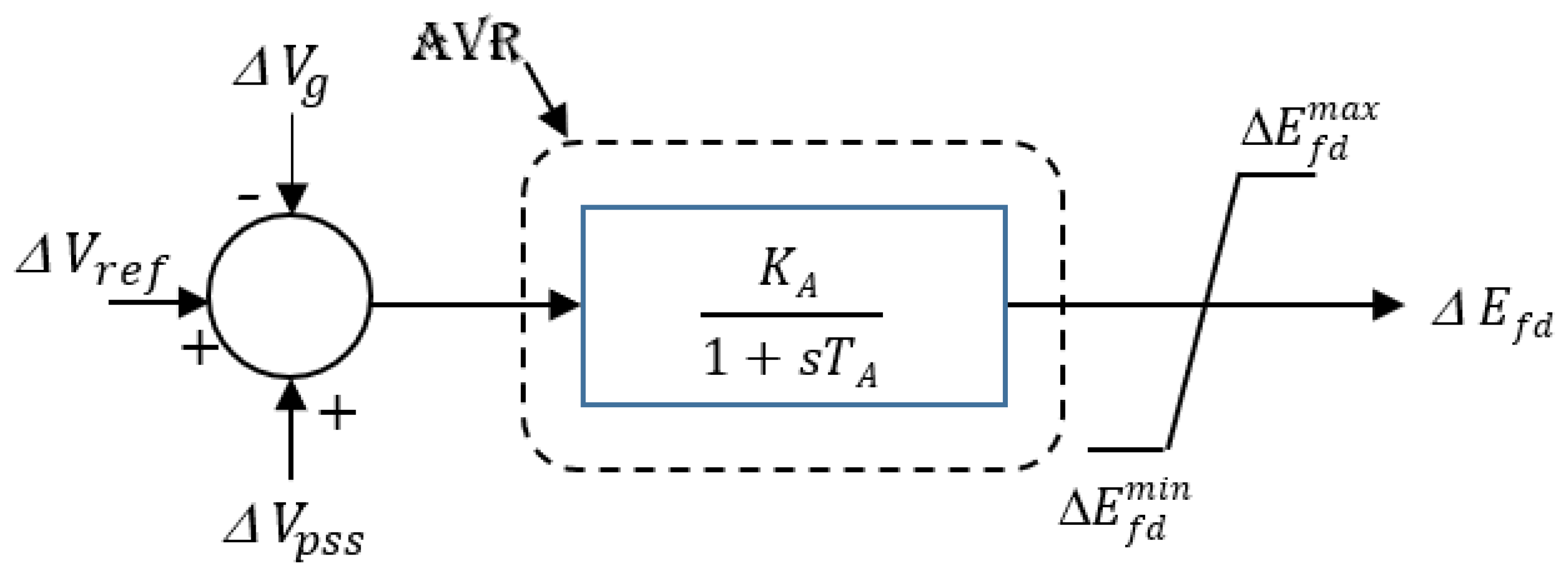
2.2. Excitation System and Stabilize Models
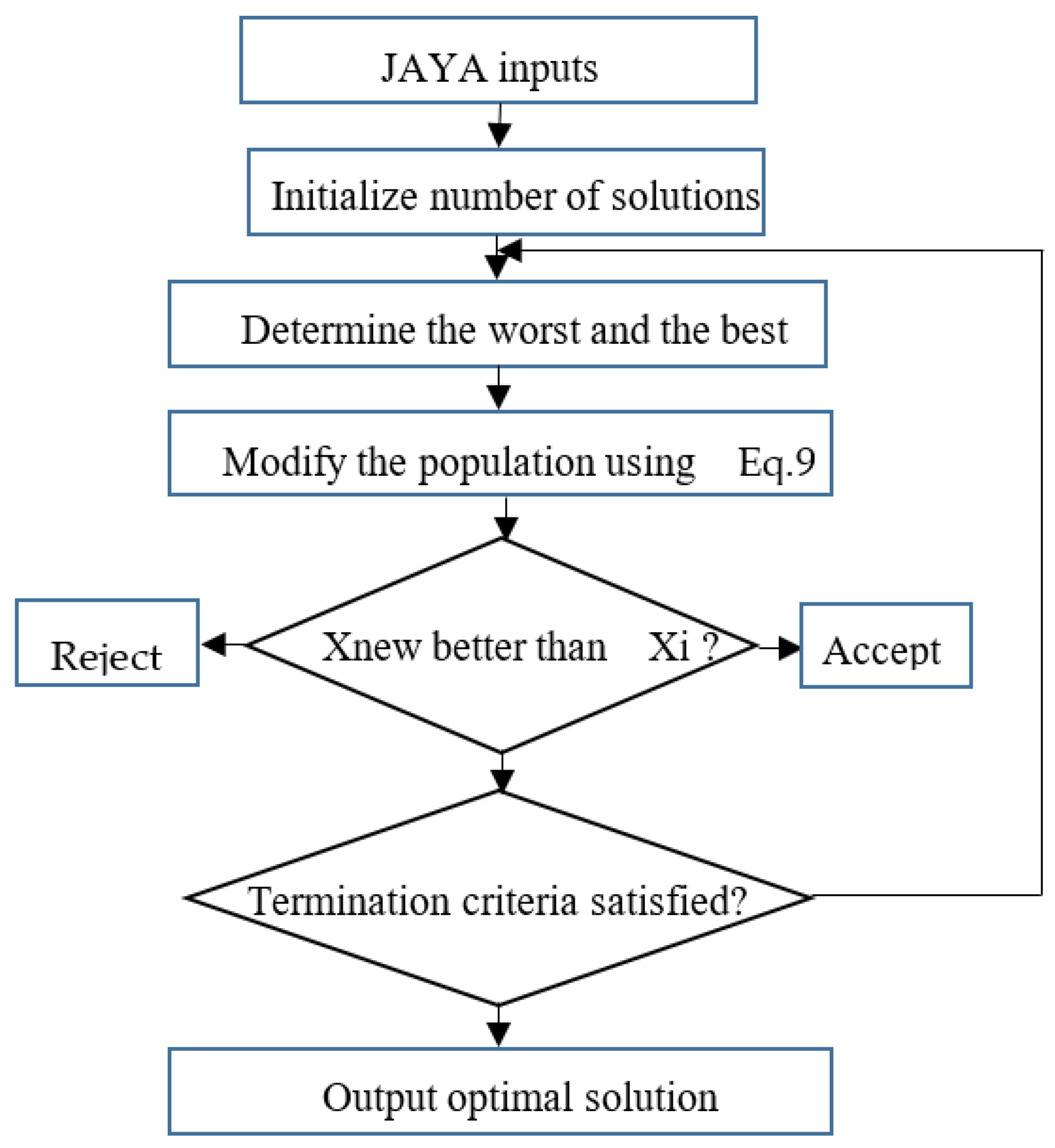
3. Classical JAYA
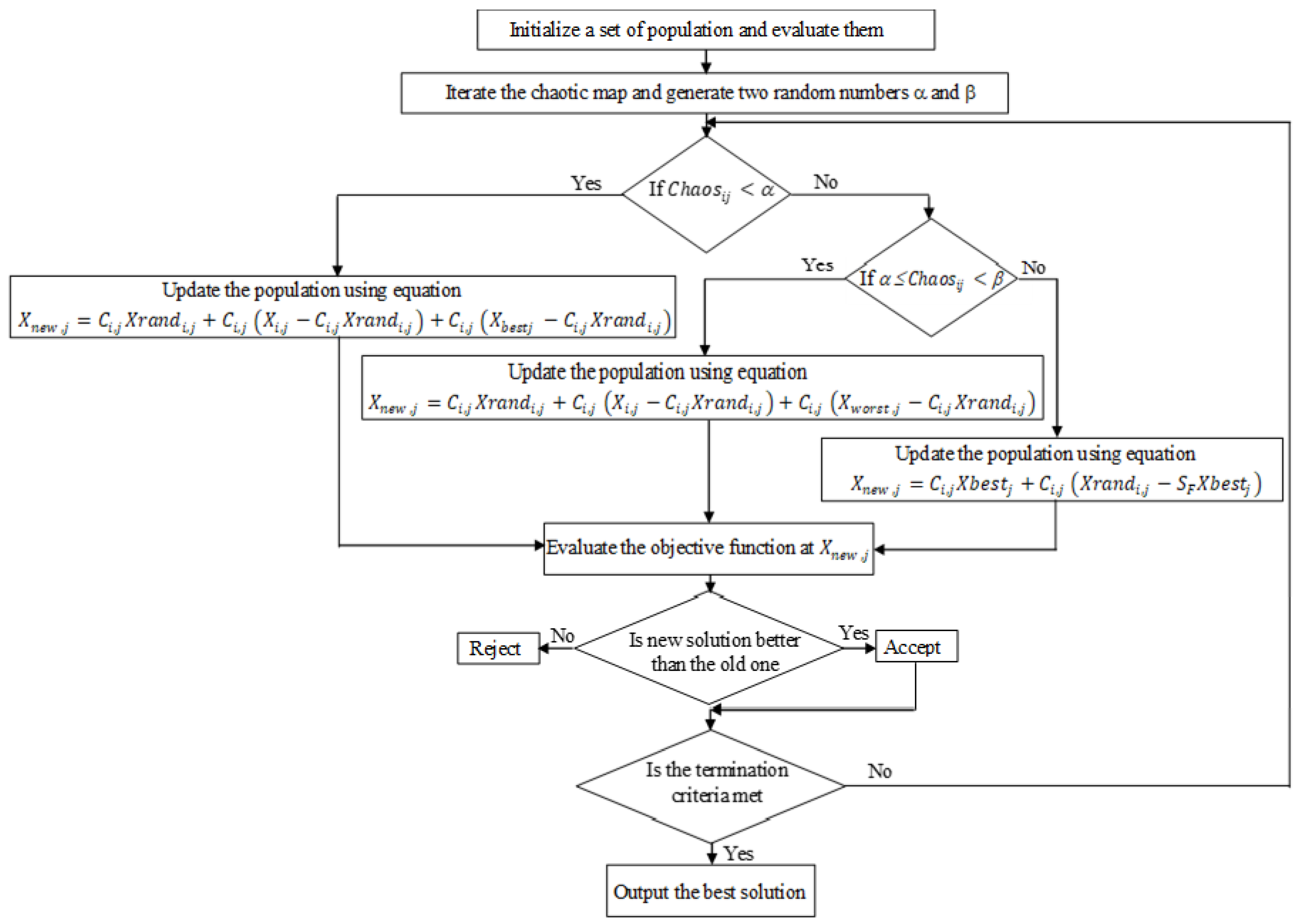
4. Proposed Chaotic JAYA
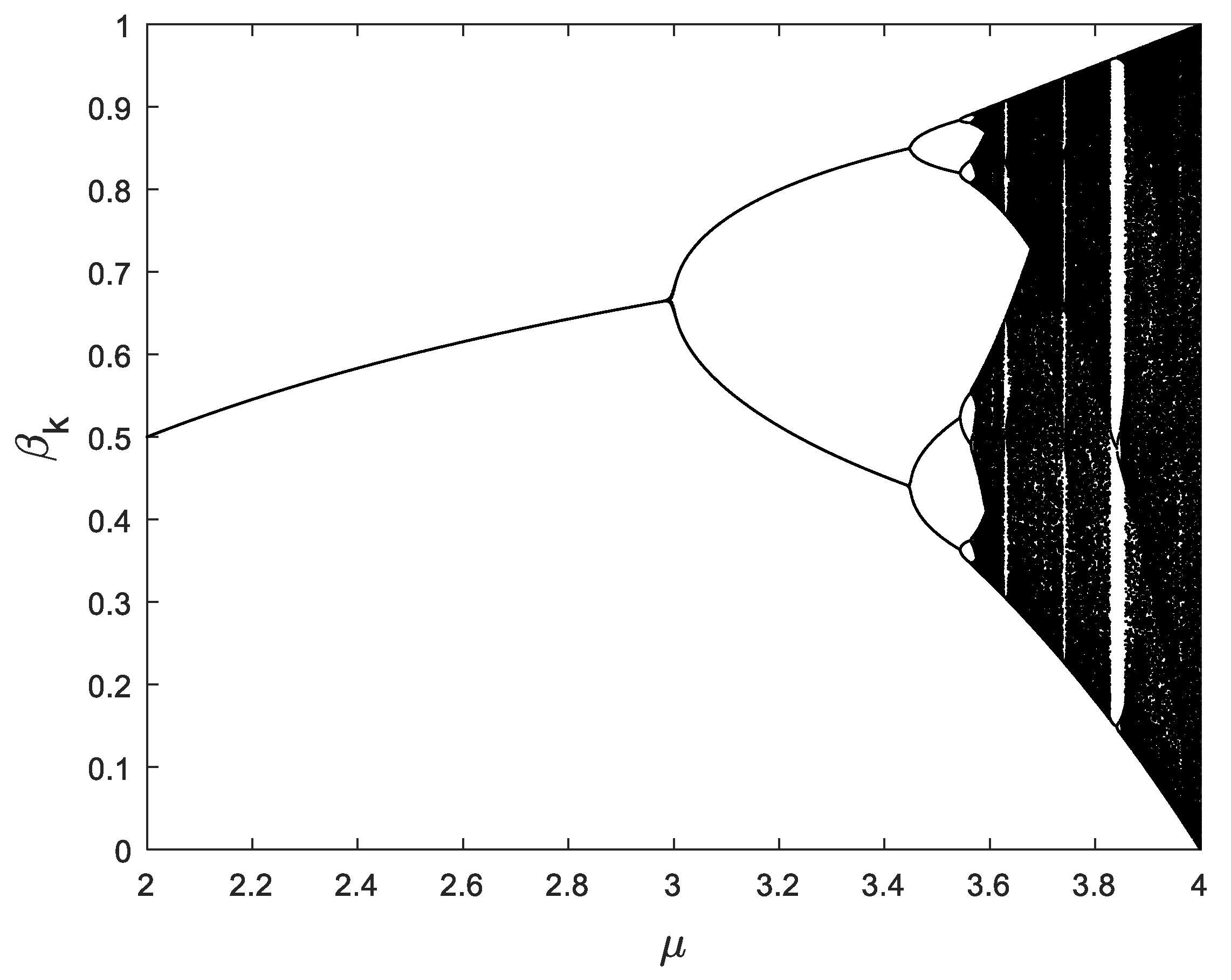
4.1. Chaotic Map
4.2. Chaotic JAYA Algorithm
5. Design Approach
5.1. Design Method
5.2. Appling of C-JAYA to Problem Stability
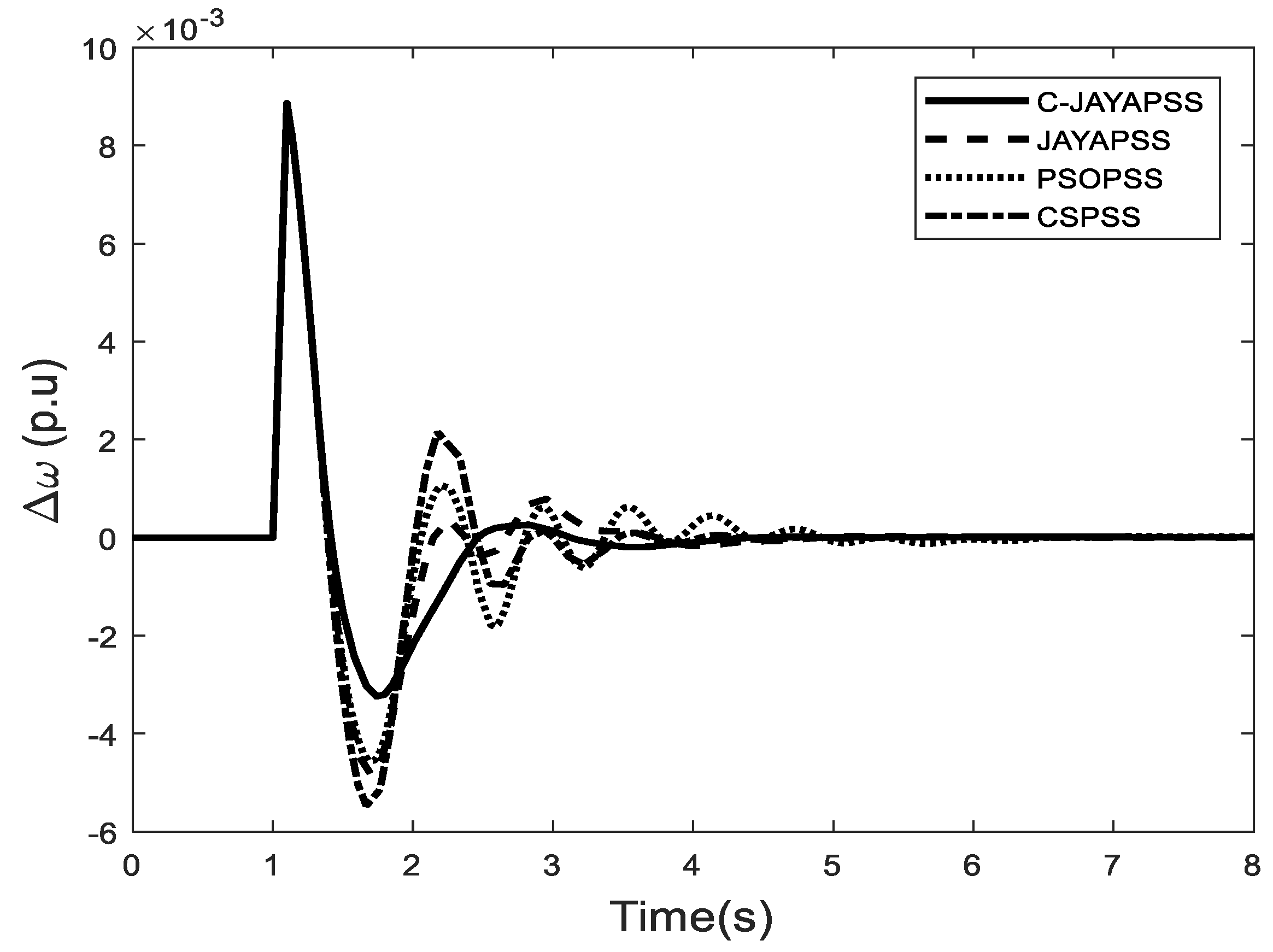
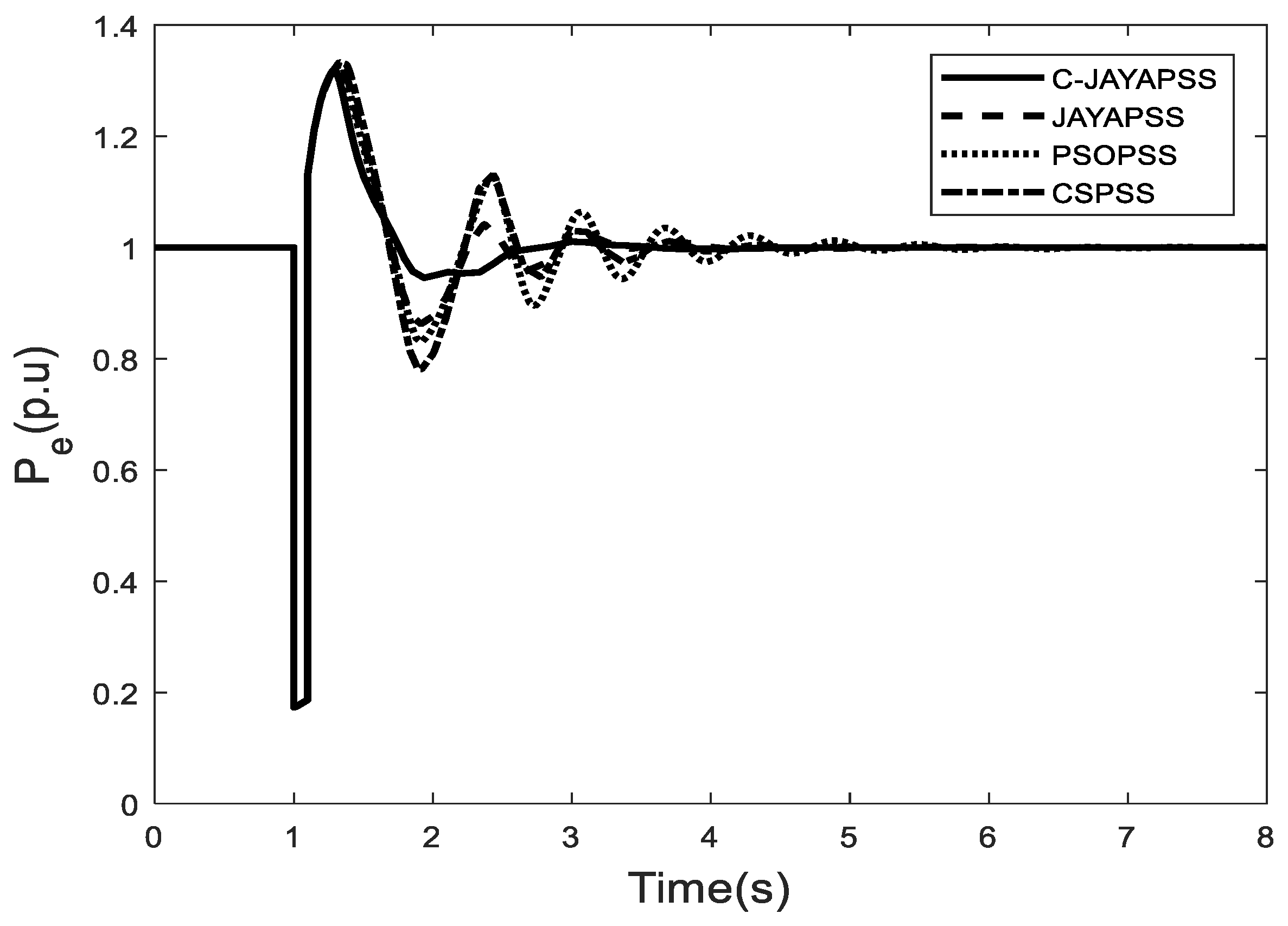
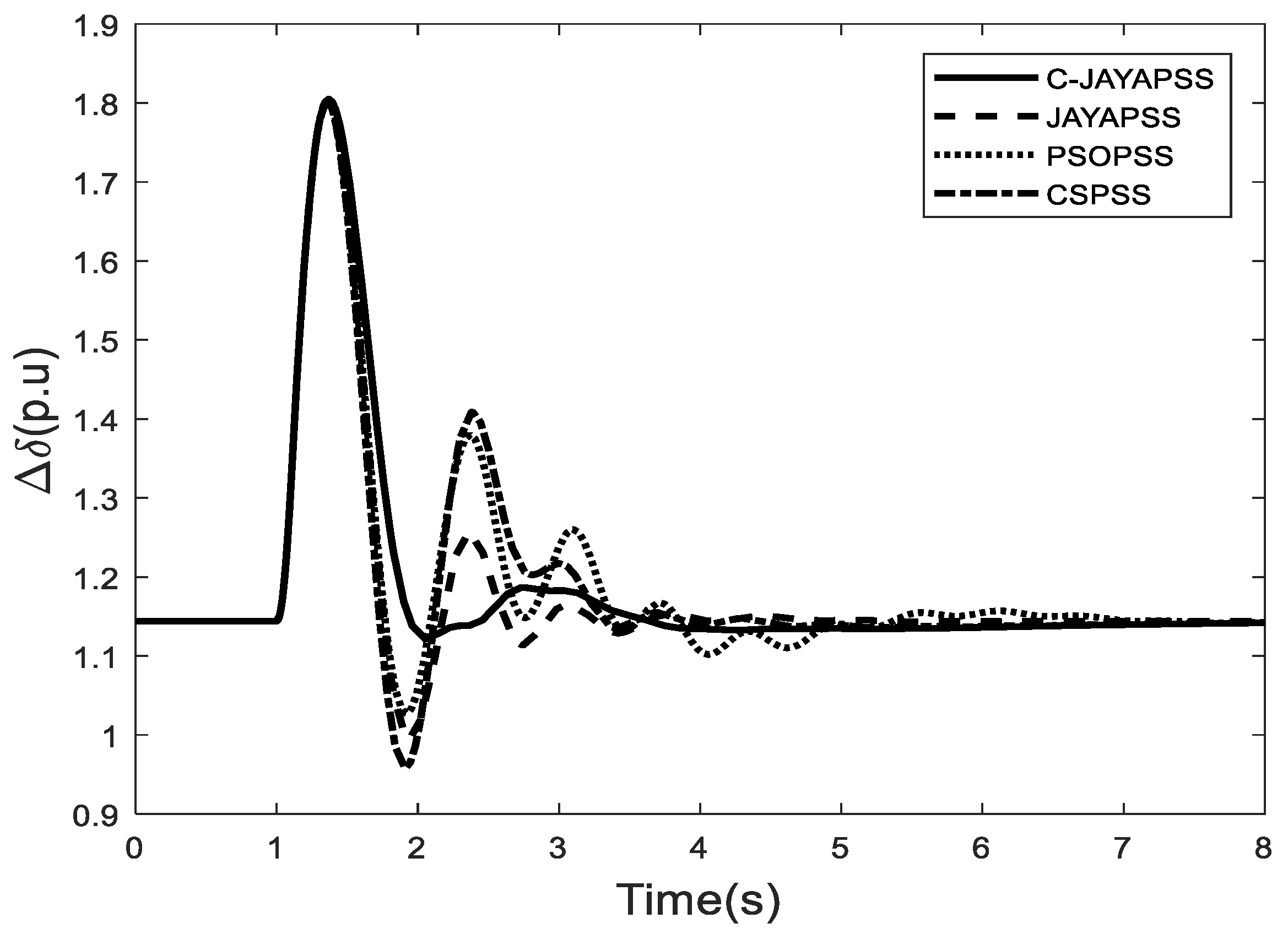
6. Simulations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Ghasemi, A.; Shayeghi, H.; Alkhatib, H. Robust design of multimachine power system stabilizers using fuzzy gravitational search algorithm. Int. J. Electr. Power Energy Syst. 2013, 51, 190–200. [Google Scholar] [CrossRef]
- Pai, M.A.; Sen Gupta, D.P.; Padiyar, K.R. Small Signal Analysis of Power Systems, 1st ed.; Narosa Publishing House: New Dehli, India, 2004; p. 3. [Google Scholar]
- Khodabakhshian, A.; Hemmati, R.; Moazzami, M. Multi-band power system stabilizer design by using CPCE algorithm for multi-machine power system. Electr. Power Syst. Res. 2013, 101, 36–48. [Google Scholar] [CrossRef]
- Chatterjee, A.; Ghoshal, S.P.; Mukherjee, V. Chaotic ant swarm optimization for fuzzy-based tuning of power system stabilizer. Int. J. Electr. Power Energy Syst. 2011, 33, 657–672. [Google Scholar] [CrossRef]
- Ray, P.K.; Paital, S.R.; Mohanty, A.; Foo, Y.E.; Krishnan, A.; Gooi, H.B.; Amaratunga, G.A. A hybrid firefly-swarm optimized fractional order interval type-2 fuzzy PID-PSS for transient stability improvement. IEEE Trans. Ind. Appl. 2019, 55, 6486–6498. [Google Scholar] [CrossRef]
- Chaib, L.; Choucha, A.; Arif, S. Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic Bat algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Jin, Z.; Chen, Y. Hybrid teaching–learning-based optimization and neural network algorithm for engineering design optimization problems. Knowl.-Based Syst. 2020, 187, 104836. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, H.; Fang, J.; Li, G.; Li, Q. A new multi-objective discrete robust optimization algorithm for engineering design. Appl. Math. Model. 2018, 53, 602–621. [Google Scholar] [CrossRef]
- Beirami, A.; Vahidinasab, V.; Shafie-khah, M.; Catalão, J.P. Multiobjective ray optimization algorithm as a solution strategy for solving non-convex problems: A power generation scheduling case study. Int. J. Electr. Power Energy Syst. 2020, 119, 105967. [Google Scholar] [CrossRef]
- Farah, A.; Belazi, A. A novel chaotic Jaya algorithm for unconstrained numerical optimization. Nonlinear Dyn. 2018, 93, 1451–1480. [Google Scholar] [CrossRef]
- Rao, R.V.; More, K.C. Optimal design and analysis of mechanical draft cooling tower using improved Jaya algorithm. Int. J. Refrig. 2017, 82, 312–324. [Google Scholar] [CrossRef]
- Rao, R.V.; Saroj, A. An elitism-based self-adaptive multi-population Jaya algorithm and its applications. Soft Comput. 2019, 23, 4383–4406. [Google Scholar] [CrossRef]
- Caldeira, R.H.; Gnanavelbabu, A. Solving the flexible job shop scheduling problem using an improved Jaya algorithm. Comput. Ind. Eng. 2019, 137, 106064. [Google Scholar] [CrossRef]
- Raut, U.; Mishra, S. An improved Elitist–Jaya algorithm for simultaneous network reconfiguration and DG allocation in power distribution systems. Renew. Energy Focus 2019, 30, 92–106. [Google Scholar] [CrossRef]
- Guesmi, T.; Farah, A.; Marouani, I.; Alshammari, B.; Abdallah, H.H. Chaotic sine–cosine algorithm for chance-constrained economic emission dispatch problem including wind energy. IET Renew. Power Gener. 2020, 14, 1808–1821. [Google Scholar] [CrossRef]
- Yousri, D.; Allam, D.; Eteiba, M.B. Chaotic whale optimizer variants for parameters estimation of the chaotic behavior in Permanent Magnet Synchronous Motor. Appl. Soft Comput. 2019, 74, 479–503. [Google Scholar] [CrossRef]
- García-Ródenas, R.; Linares, L.J.; López-Gómez, J.A. A memetic chaotic gravitational search algorithm for unconstrained global optimization problems. Appl. Soft Comput. 2019, 79, 14–29. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; Hassanien, A.E.; Bhattacharyya, S. Chaotic crow search algorithm for fractional optimization problems. Appl. Soft Comput. 2018, 71, 1161–1175. [Google Scholar] [CrossRef]
- Kaur, G.; Arora, S. Chaotic whale optimization algorithm. J. Comput. Des. Eng. 2018, 5, 275–284. [Google Scholar] [CrossRef]
- Sayed, G.I.; Khoriba, G.; Haggag, M.H. A novel chaotic salp swarm algorithm for global optimization and feature selection. Appl. Intell. 2018, 48, 3462–3481. [Google Scholar] [CrossRef]
- Too, J.; Abdullah, A.R. Chaotic atom search optimization for feature selection. Arab. J. Sci. Eng. 2020, 45, 6063–6079. [Google Scholar] [CrossRef]
- Tharwat, A.; Hassanien, A.E. Chaotic antlion algorithm for parameter optimization of support vector machine. Appl. Intell. 2018, 48, 670–686. [Google Scholar] [CrossRef]
- Farah, A.; Guesmi, T.; Abdallah, H.H.; Ouali, A. A novel chaotic teaching–learning-based optimization algorithm for multi-machine power system stabilizers design problem. Int. J. Electr. Power Energy Syst. 2016, 77, 197–209. [Google Scholar] [CrossRef]
- Peres, W.; Júnior, I.C.S.; Passos Filho, J.A. Gradient based hybrid metaheuristics for robust tuning of power system stabilizers. Int. J. Electr. Power Energy Syst. 2018, 95, 47–72. [Google Scholar] [CrossRef]
- Butti, D.; Mangipudi, S.K.; Rayapudi, S.R. An improved whale optimization algorithm for the design of multi-machine power system stabilizer. Int. Trans. Electr. Energy Syst. 2020, 30, e12314. [Google Scholar] [CrossRef]
- Abd Elazim, S.M.; Ali, E.S. Optimal power system stabilizers design via cuckoo search algorithm. Int. J. Electr. Power Energy Syst. 2016, 75, 99–107. [Google Scholar] [CrossRef]
- Rao, R.V. Jaya: An Advanced Optimization Algorithm and Its Engineering Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 770–780. [Google Scholar]
- Li, C.; Zhou, X.; Gao, D.Y. Stable trajectory of logistic map. Nonlinear Dyn. 2014, 78, 209–217. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | ||||||
|---|---|---|---|---|---|---|
| C-JAYA | −47.0458 | 95.0377 | 1.9750 | 0.1059 | 0.3624 | 1.8487 |
| JAYA | −12.1393 | 33.1568 | 1.8413 | 0.2951 | 1.4674 | 1.9591 |
| PSO | −18.3154 | 87.0993 | 1.8328 | 0.4180 | 1.9986 | 0.0111 |
| CS | −16.9978 | 74.6285 | 1.7516 | 0.1885 | 0.4841 | 1.7070 |
| Loading | P(pu) | Q(pu) |
|---|---|---|
| Case 1 | 1 | 0.015 |
| Case 2 | 1 | −0.1 |
| Case 3 | 0.8 | 0.5 |
| Case 4 | 0.95 | 0.3 |
| Method | ITAE | FD | ||||||
|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | Case 1 | Case 2 | Case 3 | Case 4 | |
| C-JAYAPSS | 0.87 | 0.94 | 0.92 | 1.03 | 16.21 | 19.38 | 21.04 | 24.12 |
| JAYAPSS | 0.93 | 1.04 | 1.14 | 1.11 | 21.36 | 25.14 | 27.77 | 28.65 |
| PSOPSS | 1.01 | 1.13 | 1.38 | 1.45 | 28.74 | 32.88 | 39.15 | 52.09 |
| CPSS | 1.17 | 1.31 | 1.05 | 1.21 | 44.51 | 56.71 | 23.19 | 33.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshammari, B.M.; Farah, A.; Alqunun, K.; Guesmi, T. Robust Design of Dual-Input Power System Stabilizer Using Chaotic JAYA Algorithm. Energies 2021, 14, 5294. https://doi.org/10.3390/en14175294
Alshammari BM, Farah A, Alqunun K, Guesmi T. Robust Design of Dual-Input Power System Stabilizer Using Chaotic JAYA Algorithm. Energies. 2021; 14(17):5294. https://doi.org/10.3390/en14175294
Chicago/Turabian StyleAlshammari, Badr M., Anouar Farah, Khalid Alqunun, and Tawfik Guesmi. 2021. "Robust Design of Dual-Input Power System Stabilizer Using Chaotic JAYA Algorithm" Energies 14, no. 17: 5294. https://doi.org/10.3390/en14175294