1. Introduction
The increasing technical innovations of the last few years have allowed new opportunities and applications for the Internet of Things (IoT), and the advent of Low-Power Wide-Area Network (LPWAN) technologies has facilitated massive access to IoT nodes [
1]. The IoT is becoming extremely popular in agriculture and environmental monitoring, where smart agriculture applications can improve sustainability and give farms an economic return of up to 25% of the harvest. For this reason, nowadays, many sensors are used for smart agriculture applications, and the trend is increasing. For instance, moisture sensor monitoring is particularly useful in understanding irrigation needs: when soil moisture is below a certain level, water can be provided through the activation of local irrigation actuators connected with sensor nodes, allowing for more efficient irrigation and greater sustainability and reducing human intervention.
When IoT devices are deployed in remote and rural areas, a significant criticality is the lack of Internet connectivity and local power supply. This issue can be overcome by adopting low-power, long-range radio communications using an IoT Gateway (GW) onboard an aerial node, a so-called Unmanned Aerial Vehicle (UAV). The UAV is envisaged to periodically pass over the IoT sensors’ area in order to collect data measurements and to forward them to the Internet.
Although there are several LPWAN technologies, in this study, we focus on LoRa because this low-power communication technology can allow devices to communicate with other nodes kilometers away, lasting several years without battery replacements. Furthermore, LoRa allows work to be conducted on an open-source Medium Access Control (MAC) layer (specified as LoRaWAN) to implement new protocol solutions or other specific scenario-based upgrades.
This paper deals with the communication of ground IoT nodes with a GW placed onboard a UAV passing in their proximity. This work also proposes an opportunistic protocol to synchronize the ground node transmission with the UAV pass, thus enabling the node to stay in the sleeping state most of the time and save energy. This solution can coordinate node transmissions in order to avoid collisions, a key feature in the perspective of a future massive deployment of sensor nodes. This work includes a study on propagation to assess the path loss attenuation when sensors are close to the ground. Moreover, an analytical model has allowed us to identify the best physical layer settings of the LoRa for the opportunistic scheme in terms of the probability that a sensor can communicate with the UAV during its visibility interval. This synchronization protocol has also been tested in the laboratory.
The present work extends the study of the same authors in [
2] by including significant improvements as follows: (i) the UAV flight dynamics and wind conditions have been considered; (ii) an analytical approach is developed to evaluate the impact of synchronization; and (iii) a preliminary laboratory setup has been presented to validate our scheme with LoRa devices.
This paper is organized as follows.
Section 2 introduces the LoRa/LoRaWAN technology, describing the use of UAVs in LoRa systems and providing a literature survey. Our UAV-based system is then described in
Section 3, while
Section 4 deals with the opportunistic protocol designed to manage the communication between ground nodes and the UAV.
Section 5 analyzes the probability that the sensors can communicate with the UAV passing over them. Experimental results regarding path loss attenuation for a rural area and test validation of the opportunistic protocol are presented in
Section 6, and discussion on the achieved results, lessons learned, and open issues are provided in
Section 7. Finally,
Section 8 outlines the concluding remarks.
3. System Description
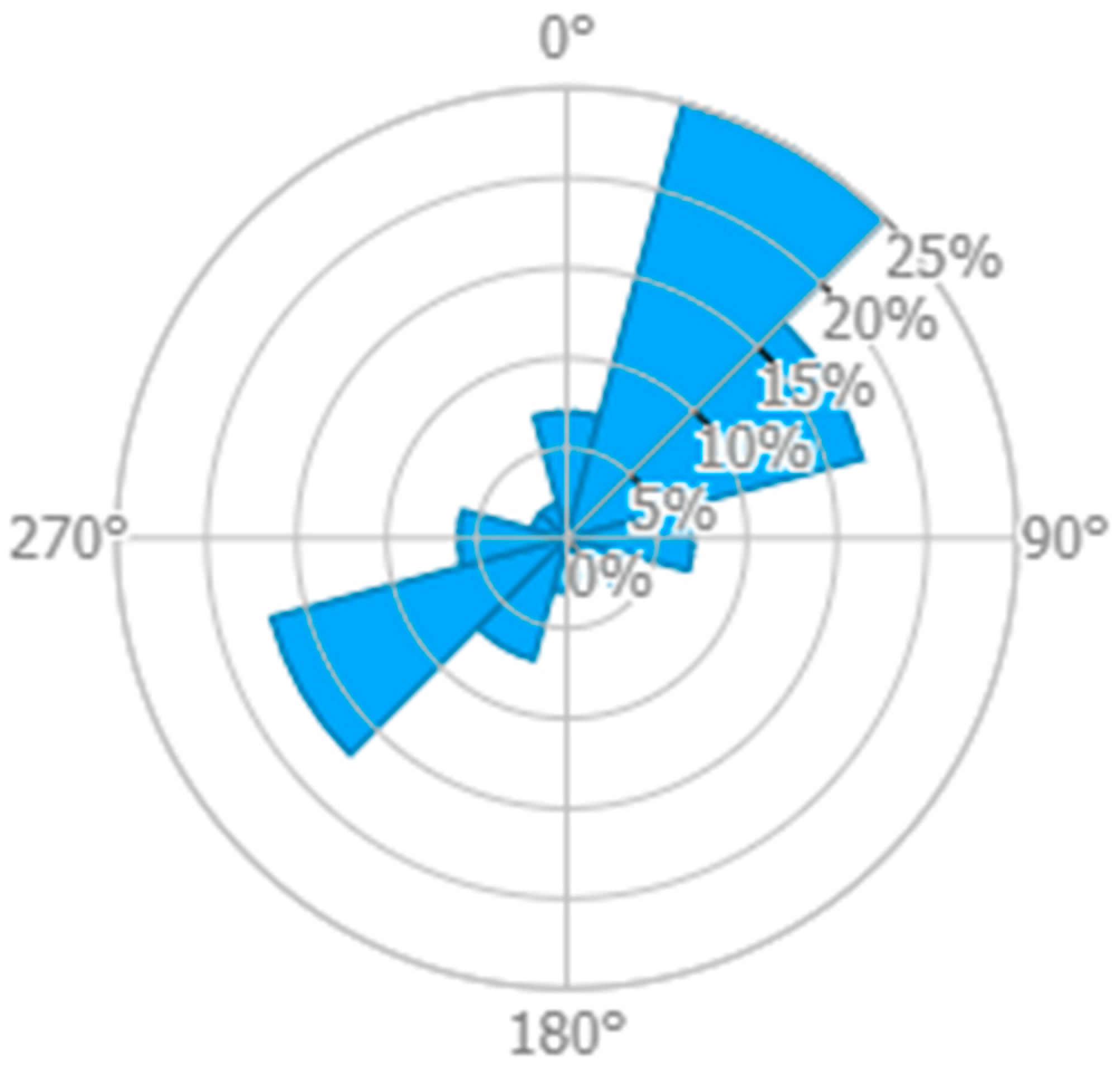
The operating context refers to a rural/remote area without network connectivity to support an IoT network, where data transmission is obtained through the adoption of a LoRa GW onboard a flying UAV. Specifically, the objective is to monitor a rural area along a river or other ‘linear’ infrastructures (e.g., pipelines), assuming the use of a fixed-wing UAV to perform this task, as there is no need for hovering functions, only to scan a specific area in the shortest possible time. LoRa sensors on the ground send periodic measurements. We have selected a reference location in Tuscany (close to Florence) and determined the wind speed and direction statistics at 120 m of altitude to be suitable for UAV flight. Data have been taken from the Wind Atlas [
24] and are shown in
Figure 3 below.
For our reference location, we have selected the two strongest wind conditions and neglected all the other cases for which we refer to the ideal condition of no winds. Then, according to
Figure 3, we have the following wind statistics:
Case 1: Average wind speed of 6.5 m/s from NNE for 25% of the time (UAV path shown in red in
Figure 4);
Case 2: Average wind speed of 6.5 m/s from WSW for 16% of the time (UAV path shown in blue in
Figure 4);
Case 3: Negligible wind speed for 59% of the time (UAV path shown in green in
Figure 4).
The UAV route is predefined to follow waypoints. The UAV flight is controlled by an autopilot (Guidance, Navigation and Control system, GN&C) that is reproduced in our study by the UAV Toolbox provided by Matlab (fixed-wing case) [
25,
26]. This tool allows the simulation of the UAV, considering the flight dynamics and the effects of winds. In its flight, the UAV visits each waypoint with a tolerance of about ±50 m [
27].
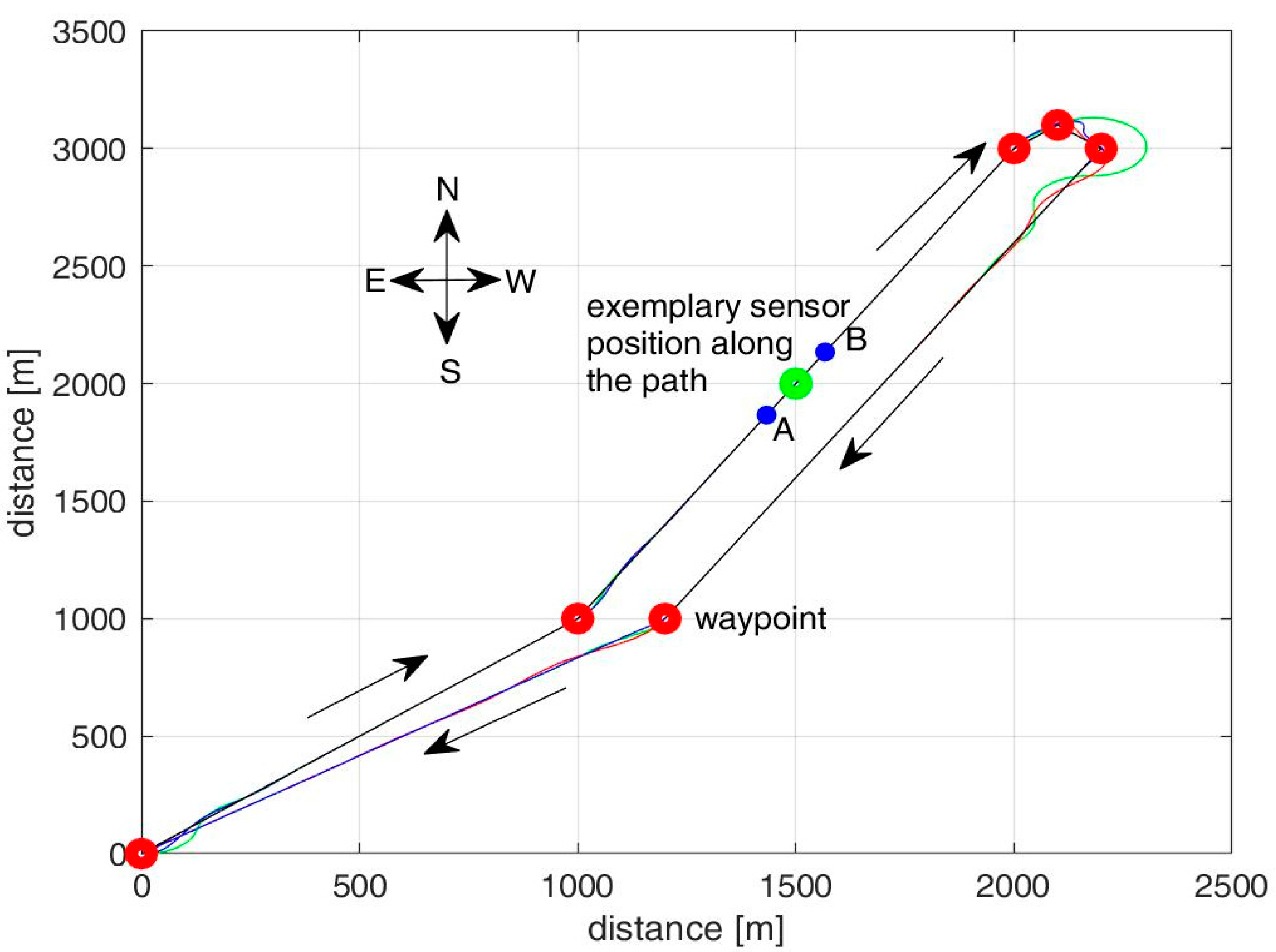
Figure 4 shows our UAV path based on waypoints and considering the three wind cases of our reference scenario and the UAV having to monitor the IoT sensors distributed along a river. If the sensors are deployed more sparsely, a UAV path optimization algorithm has to be adopted to select the shortest path to reach all of them; this is not the present case, since the sensors are deployed along a river modeled by linear segments. The presence of the winds modifies the actual UAV speed even if the controller onboard counteracts their effects and is set to a nominal UAV speed denoted as
vd = 70 km/h. The results obtained from the Matlab UAV Toolbox simulator for the time needed to cover our path are 426 s, 422 s, and 398 s for the red, blue, and green wind cases, respectively.
Let us refer to the position of an exemplary sensor along the UAV path, as shown in
Figure 4. The UAV will start to be visible for this sensor when it reaches position A and ends its visibility interval at point B. The distance from A to B is 2
R, where
R is the coverage radius for the sensor node. The wind conditions affect the time when the UAV is at the minimum distance from the
i-th sensor,
Tc,i, and the interval for which the UAV is visible to the sensor, Δ
v(
SF), where
SF is the adopted spreading factor,
SF Î {7, 8, 9, 10, 11, 12}. In nominal conditions without winds, we have:
where
x denotes the distance of the sensor node position from the projection of the UAV path on the ground. The coverage
R =
R(
SF) will be characterized later in this section based on a LoRa link budget.
The UAV can receive the transmissions of a sensor if it is within the coverage radius R(SF) and inside its UAV visibility interval Δv(SF) (1).
Let us recall that
Tc,i denotes the time when the UAV reaches the closest point along its path from the
i-th sensor node; this time is at the center of the UAV visibility interval for the
i-th node.
Table 2 shows the central visibility time
Tc,i and the actual UAV speed
v for the exemplary sensor in
Figure 4; the impact of the wind conditions on
Tc,i and
v is evident.
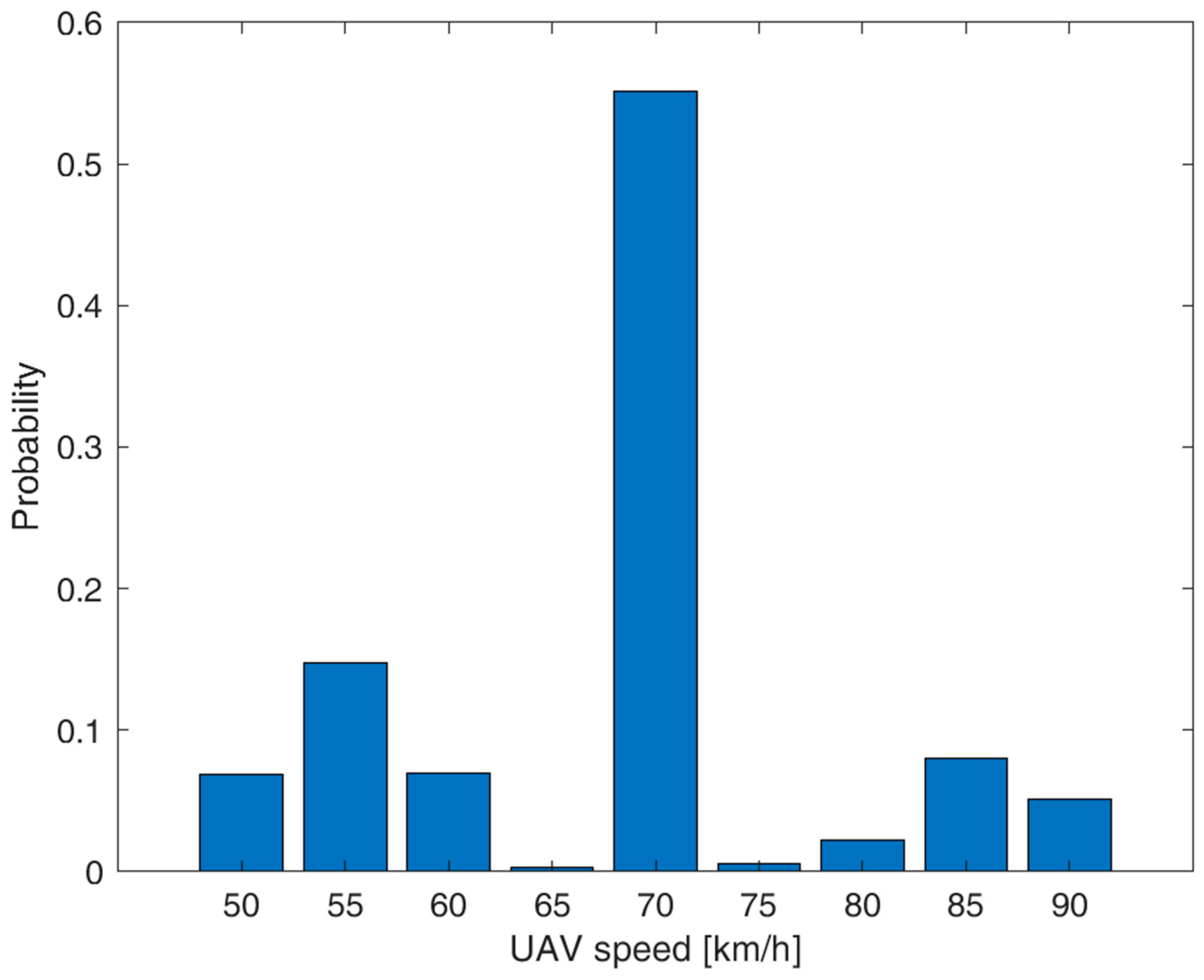
Referring to our scenario in
Figure 4,
Figure 5 shows the distribution (histogram) of the resulting UAV speed
v as a result of the nominal cruise speed of 70 km/h and the effects of our wind conditions along the path. We can notice the peak caused by the nominal cruise speed of 70 km/h when there are no winds (case 3 above), with a probability of 59%. The effects of the winds in cases 1 and 2 cause an alteration in the UAV’s speed, and thus the UAV speed values range from 50 to 90 km/h. In our theoretical study, we will model the UAV speed’s probability density function
fv(
v) as a combination of a uniform distribution from
vmin = 50 to
vmax = 90 km/h and a discrete value at the nominal speed
vd of 70 km/h as follows:
where
v is the UAV’s effective flight speed in km/h,
is the Delta Dirac function centered at 0, and
rect(
v) is the unitary rectangular function from −0.5 to 0.5. Note that the term
in (1) is related to the nominal UAV speed
vd corresponding to case 3 with a probability of 59%.
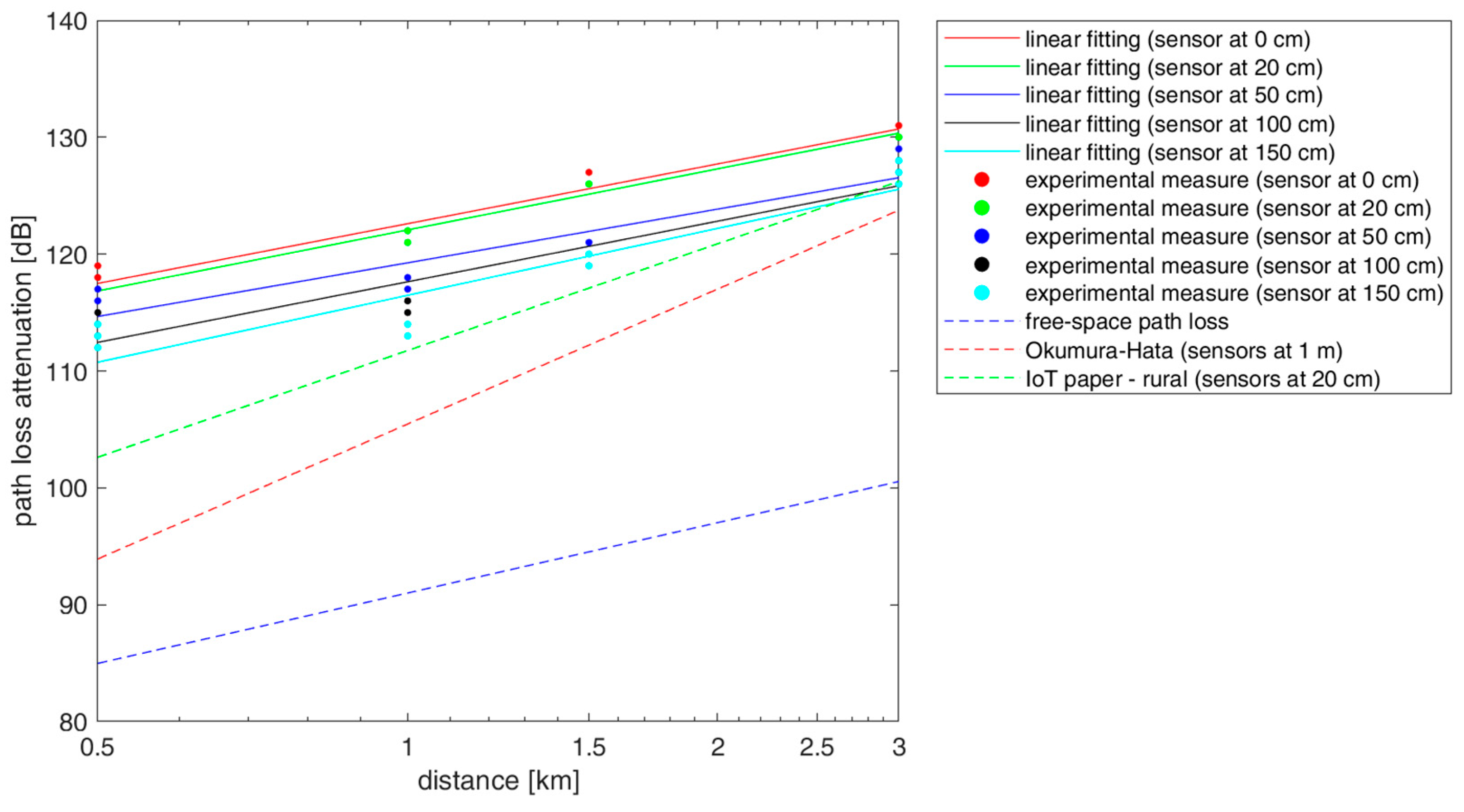
The signal to and from the UAV is affected by many scattering obstacles (e.g., buildings, trees). The signal received is the composition of many waves, including Line of Sight (LoS), reflected path, diffracted path, and scattering. These effects depend on the environment, the carrier frequency, and the UAV’s altitude. All these elements (commonly identified as clutter terms) cause the path loss attenuation to deviate from the free space or the two-ray models [
28]. Even if the path loss model for our specific rural area case is studied in
Section 6, we prefer to adopt a more general path loss model based on the work in [
29], including an additional attenuation due to trees and foliage of 10 dB [
30]. The resulting long-distance (large time-scale) path loss model depends on the distance
d as follows:
where, for LoS conditions, we consider
= 116 dB for
= 1 km,
= 3, and
= 10 dB. In non-LoS conditions, we should consider an additional path loss attenuation term of 10–20 dB.
We refer to a UAV flying at an altitude
H = 120 m (the limit value for the open flight category by the European Union Aviation Safety Agency, EASA [
31]) and a GW receiver (LoRa SX 1276) with sensitivity
S = {−124, −127, −130, −133, −135, −137} dBm for
SF ∈ {7, 8, 9, 10, 11, 12}, respectively, with a 125 kHz bandwidth [
32]. We consider omnidirectional antennas on both the transmitter and receiver (antenna gains
Gtx =
Grx = 0 in dBi) with connector and cabling losses
Lcon = 2 dB. Let
Pt denote the sensor transmission power. We consider connectivity to be achieved if the following condition is met:
where
M is a margin to protect the transmission from typical shadowing effects caused by obstacles along the path from the transmitter and receiver; we typically assume
M = 10 dB for a safe link budget.
The coverage radius
R is the maximum value of
d satisfying the condition in (4) that the received power is above the sensitivity threshold for the corresponding
SF:
Note that we compute R in (5) referring to the uplink transmission (i.e., from sensors to the UAV), but we also apply it to the downlink, assuming that the uplink case is more critical.
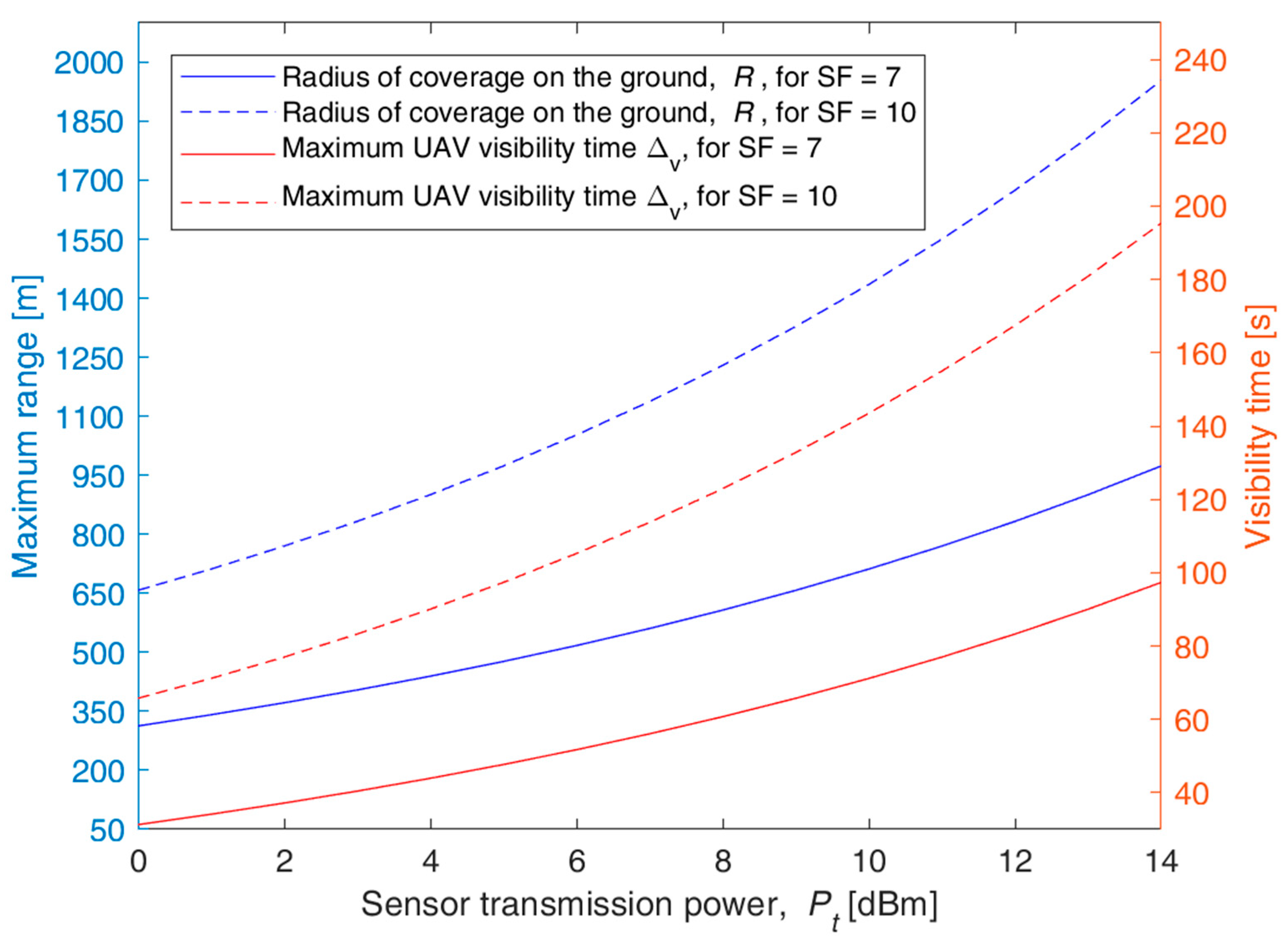
Figure 6 shows the maximum range
R(
SF) and the corresponding maximum Δ
v(
SF) for
x = 0 as functions of the sensor transmission power
Pt in dBm for
SF = 7 and 10.
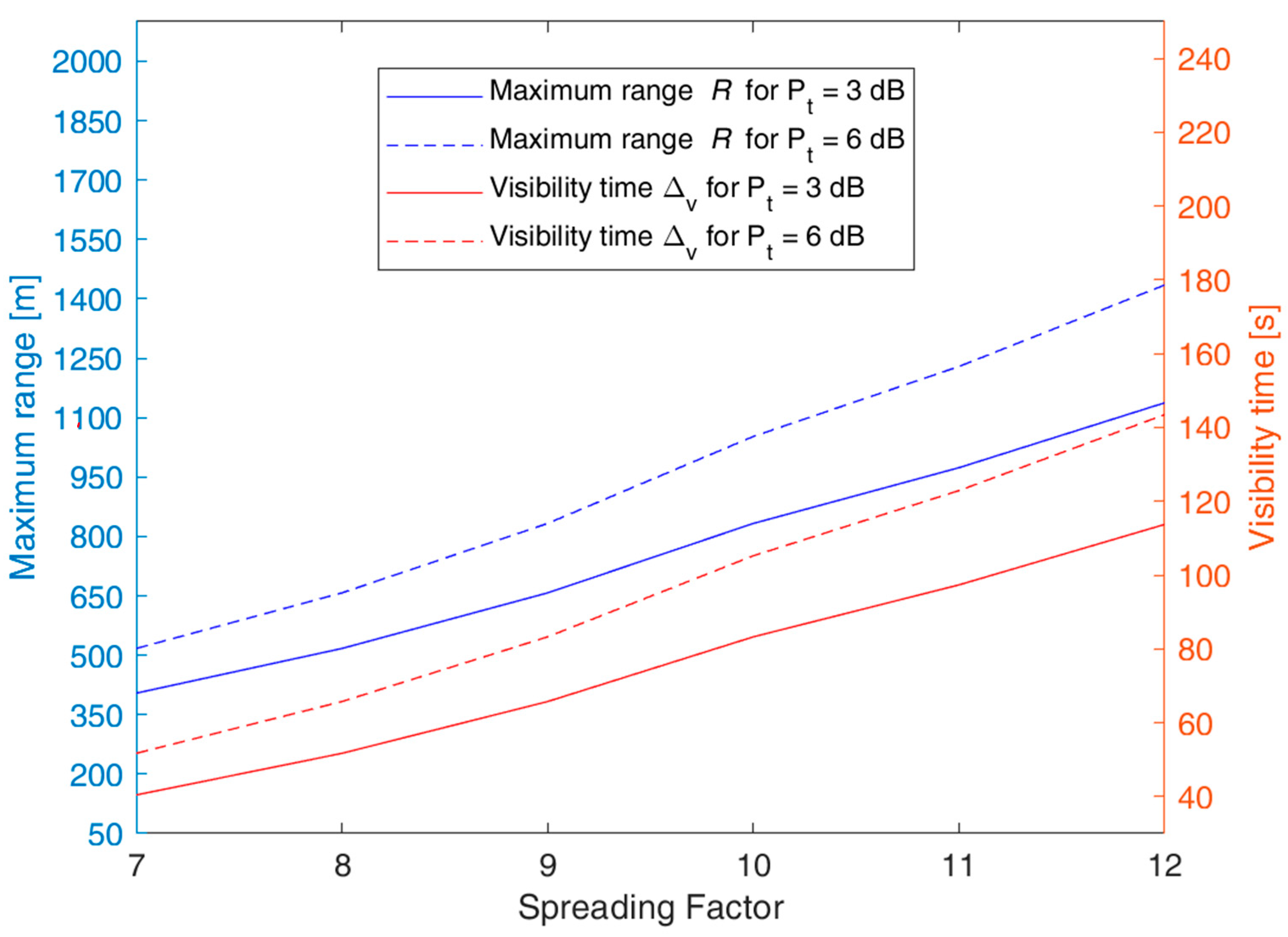
Figure 7 provides a similar graph but having
R(
SF) and Δ
v(
SF) as functions of
SF for sensor transmission power
Pt = 3 and 6 dB. For instance, with
Pt = 6 dBm, we obtain
R = 500 m for
SF = 7 and
R = 1100 m for
SF = 10. Correspondingly, the maximum UAV visibility time for a sensor on the ground is Δ
v = 55 s for
SF = 7 and 125 s for
SF = 10 with nominal UAV speed conditions. The radius
R and the visibility interval Δ
v can be improved by increasing the
SF value and/or the transmission power level
Pt.
To complete the signal propagation characterization, we consider the probability of LoS for the communication between ground nodes and the UAV,
PLoS. This probability is essential because the path loss model in (3) can only be applied in LoS conditions. According to [
33],
PLoS can be expressed by a sigmoid-type function as follows:
where
is the elevation angle in degrees of the communication between the ground sensor node and the UAV, and
a and
b are coefficients (we consider
= 5 and
= 0.3 for suburban and rural areas [
33]). In our study, the value of
for a sensor depends on the relative position of the UAV that changes with time because the UAV moves along its path. An example of the derivation
for our case will be provided in
Section 5.
4. Synchronization Protocol for Opportunistic Communications between GW and IoT Nodes
This section describes the proposed synchronization protocol that enables LoRa devices to communicate opportunistically with the GW on the UAV to increase energy efficiency. A key point to implement reliable communications between the flying GW (onboard the UAV) and end nodes is the capability for the end nodes to be in sending/receiving mode when the UAV is within the communication range. This task could be easily achieved by implementing a LoRa Class C node, which is always on, so it can transmit and receive information at any instant. However, this class of devices is intended for actuators or power-supplied sensors due to their high energy consumption [
7]. One of the key innovations of this work is the adoption of LoRa Class A sensors for this task, allowing a very low power consumption (for instance, from 30 to 220 times lower than Class C sensors with
SF = 7 [
7]). To reach this goal, we envisage simple LoRaWAN modifications to support the synchronization of the ground node transmissions with the UAV pass time; in particular, we propose an opportunistic protocol that enables node transmission only when needed and keeps the sensor node in the sleeping state for the rest of the time to save battery energy.
In the following, the description of the opportunistic protocol is provided. We are considering a single-channel GW on the UAV. We assume all the sensors transmit using the same LoRa
SF value. The node position can be mapped during the deployment phase. Then, the node’s first transmission timing
T0s,i (corresponding to the time when the UAV is expected to reach the
i-th sensor according to the first planned flight route with nominal speed
vd) can be calculated using the Matlab UAV toolbox (
Section 3) and pre-set in this sensor node. The node location is determined at the time of installation without needing a GPS module on the node (sensors are deployed in fixed locations). However, in the case of moving sensors (i.e., livestock monitoring, etc.), each node could also be equipped with a GPS module at the cost of extra energy consumption. The initial (i.e., “first round”) transmission timing
T0s,i is initialized in the node firmware to schedule its first transmission in the middle of the related UAV coverage time interval Δ
v,i, thus achieving better margins if some variations from nominal conditions occur. In this way, the probability of LoS at the transmission time is maximized because the sensor transmits when the UAV is visible with the maximum elevation angle.
Our system is based on a route management algorithm composed of route planning and a UAV flight model. It defines the route and the expected transmission time for each sensor node to keep the synchronism with the next UAV pass. In this work, we are not interested in studying route optimization schemes. We consider the nodes along a river modeled by linear segments (we set the waypoints accordingly). A further study of route optimization is beyond the scope of the present paper, which is concerned with investigating the synchronization of sensor transmissions with the UAV pass. This route management algorithm is carried out based on the knowledge of sensor nodes’ positions and uses a UAV flight simulator (Matlab UAV Toolbox, fixed-wing case) to take the effects of wind into account.
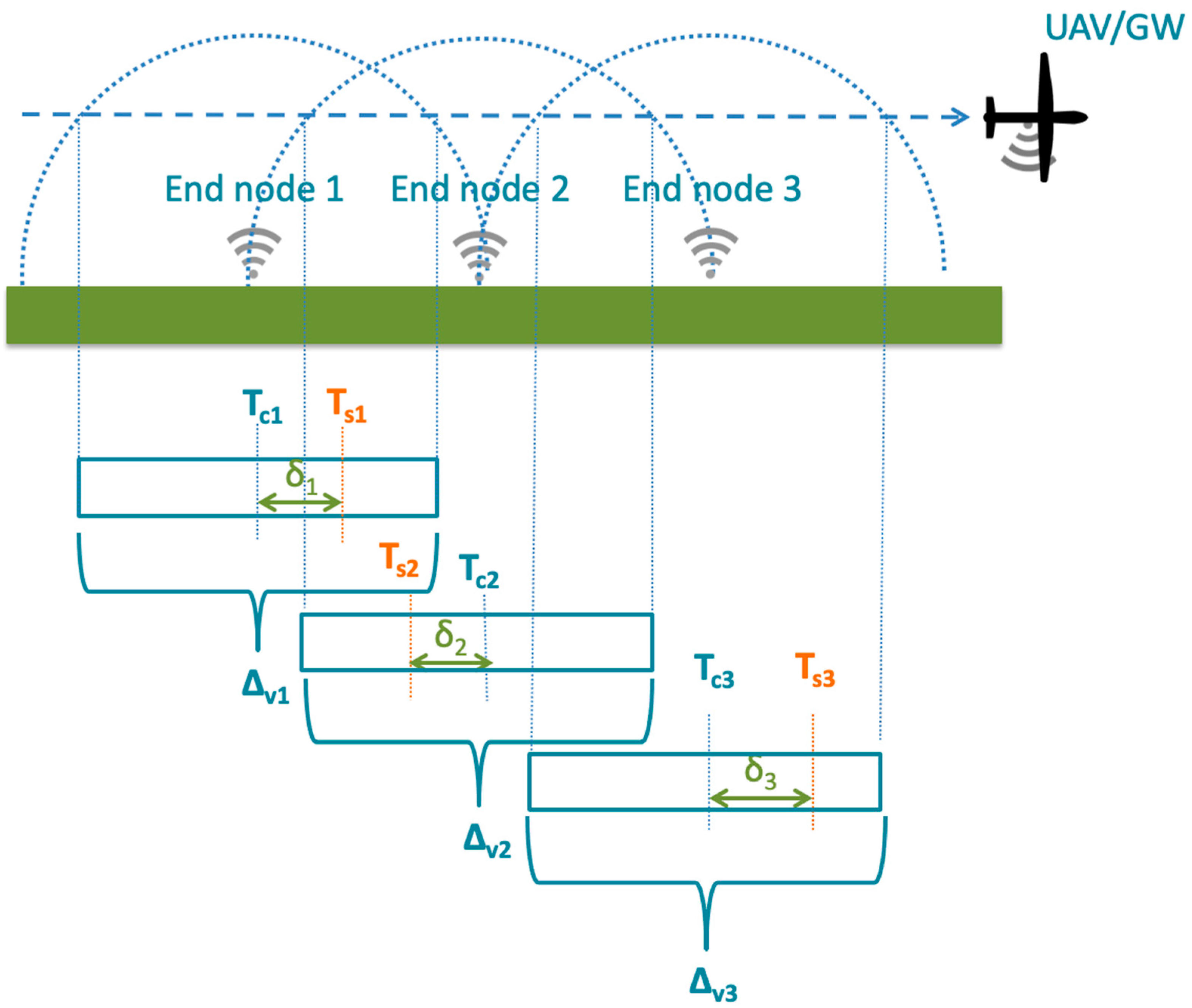
The UAV communicating with the sensor nodes expects to receive the measurements from node
I at time
Tc,i. The ideal condition for the protocol is that the
i-th sensor transmission time
Ts,i coincides with
Tc,i. However, we can lose this synchronism because of the following causes (see
Figure 8):
A shift in the UAV’s departure time;
Coarse clock precision (clock drifts on sensors);
Alteration in the UAV’s flight speed with respect to the expected one because of wind variations;
The UAV’s autopilot precision and capability to reach the waypoints also in relation to the wind conditions.
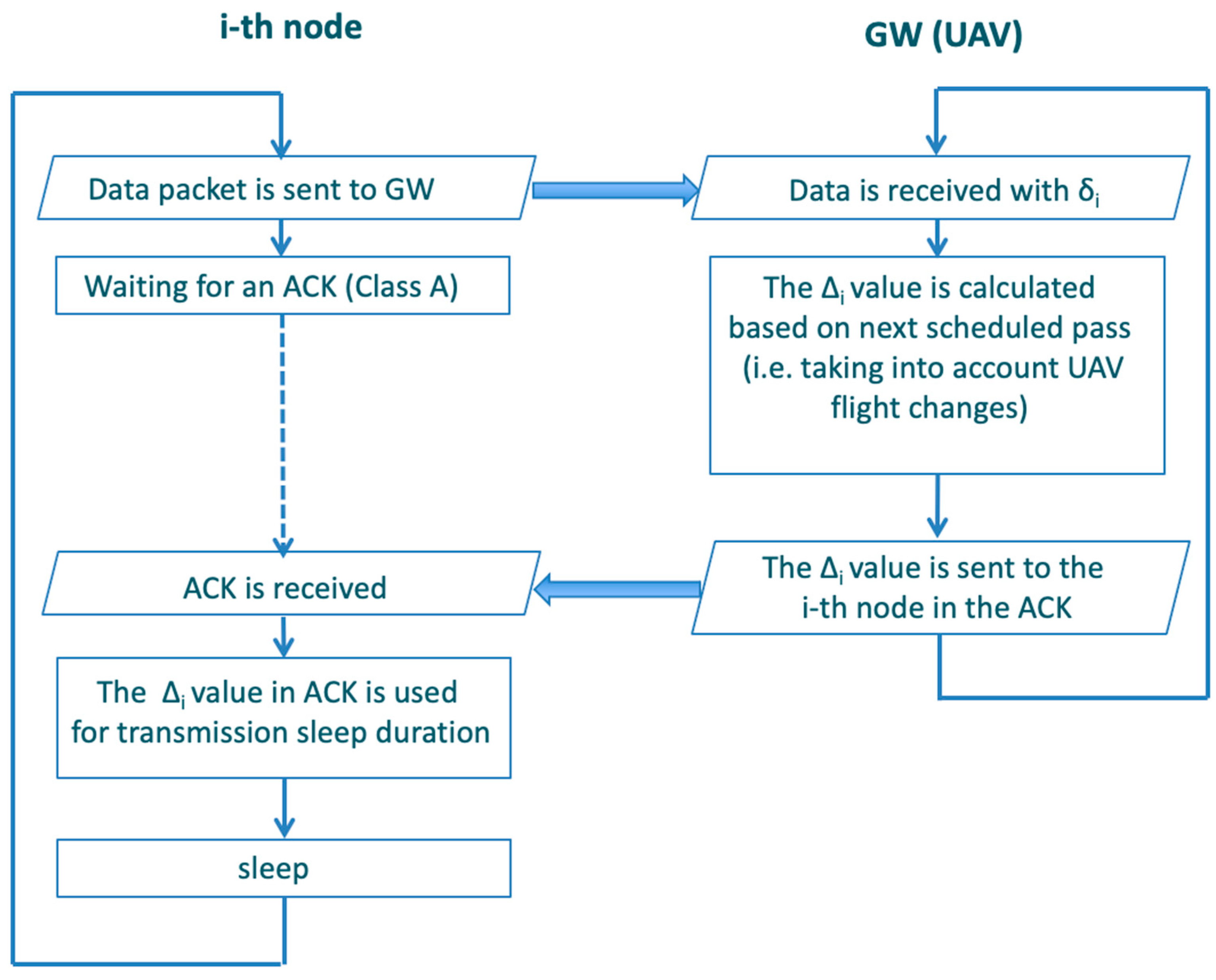
Hence, a synchronization scheme is envisaged where the UAV upgrades the i-th sensor transmission time at each pass. This is made possible using the ACK message as a reply to the measurement received by the UAV. The ACK message piggybacks the Di value for the sensor that represents an estimation of the time the sensor has to sleep before transmitting again for the next UAV pass; see the following Equation (7). The sensor receiving the ACK can then command its transceiver to enter a sleeping mode for time Δi to save energy. By adopting this protocol, a node remains in the sleeping state most of the time. The device wakes up just for the time needed to take a measurement from the field and transmit it when the UAV is expected to pass close to it.
The adopted scheme with synchronism is robust since the sensor transmission has a tolerance made possible by the UAV’s visibility interval for the sensor with a duration Δvi (SF) according to (1). Therefore, the interval is long enough that the sensor transmission falls inside it to communicate with the UAV.
This system is adaptive, allowing changes in the UAV route. It is sufficient that the UAV sends the new Di value consistent with the new path (or even the new sensor scanning order) to implement the change for the next UAV scan pass. The system is also scalable because we can add new sensors and densify them provided that a minimum distance between sensors is kept (in this regard, see Equations (8) and (9)).
Let us formally determine the Δi value used by the synchronization algorithm carried out onboard the GW. We distinguish two cases:
Case a, when the next UAV pass is contiguous with the current one;
Case b, when the next UAV pass is carried out after an interruption due to the refueling or other reasons.
We consider Ts,i as the transmission time set for the i-th sensor (for a generic transmission after the first one) according to the estimation of UAV speed and knowing the sensor coordinates and thus the corresponding distance from the origin of the UAV path. As for the T0s,i value set in the sensor at the sensor node deployment, we assume a reference UAV route carried out for the first time starting at time t0 (i.e., the time when the UAV starts to cover the path) at the nominal speed vd and covering a distance di to reach the closest point with the i-th sensor along the path. For the sake of simplicity, we define Ts,i and T0s,i using t0 = 0. We also use di as the distance from the origin along the current route to reach the i-th sensor in contrast to di,next, representing the new distance of the i-th sensor from the same UAV path origin because of a new route followed by the UAV at the next pass (di,next = di in case of no path change). We also consider vnext as the expected UAV speed of the next UAV pass, which is estimated based on wind forecasts.
In Case
a, we denote
as the estimated residual time to complete the path after reaching the
i-th sensor, considering that the UAV must return to its origin (i.e., the starting point). This time is estimated onboard the UAV, knowing the current path characteristics and wind conditions when the
i-th node is reached. In Case
b, we also need to define the time the UAV will start the next route,
Tnew (assuming that the UAV will have to stop between the current route and the new one). Therefore, Δ
i results as:
where
is the synchronization error (see
Figure 8).
Figure 9 depicts the operational steps followed at both the end node and the GW by the synchronization (opportunistic) protocol.
Several approaches can be implemented to cope with possible failed receptions of ACK messages that should update the timing of the next UAV pass. Here, two approaches have been proposed.
The first approach envisages the capability for the GW to include in its ACK the scheduled times for more next passes Δi so that if the i-th sensor cannot communicate with the UAV in the current pass, it already knows some coarse synchronism for the next UAV passes. This approach entails a tradeoff between communication robustness and flexibility in changing the UAV’s route. Upon the next transmission, the sensor could communicate current and past measurements, thus requiring a larger payload.
The second approach envisages immediate data retransmission from the node when it does not receive the ACK within a maximum waiting window. This solution introduces a tradeoff between communication robustness and the spatial density of nodes. This is because the transmission interval needed by a node could be doubled or tripled for one or two retransmissions, thus reducing the maximum density of sensors, as will be explained in relation to the next formula (9). Finally, by enlarging the data transmission time, there is a larger probability that the sensor’s transmission will not be completed before the UAV coverage is lost.
Let
(
Lp,
SF) [
(
LA,
SF)] denote the transmission time of the packet (ACK) sent by a sensor node (GW) with a payload of
Lp (
LA) bytes and using spreading factor
SF. To determine
(
Lp,
SF) and
(
LA,
SF), we need to make assumptions on the payload length for both the message sent by the sensor and the ACK sent by the GW (see
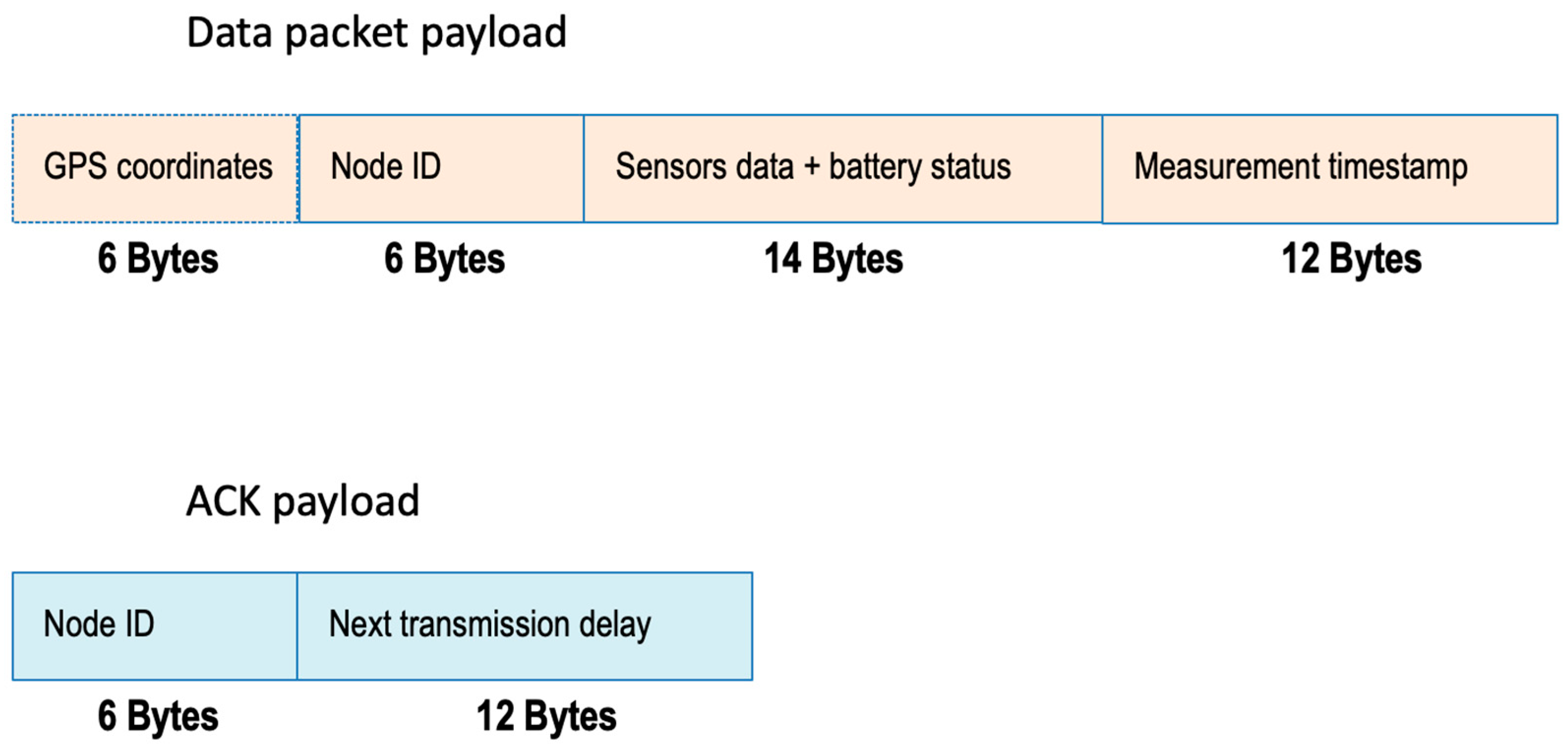
Figure 10).
Concerning the data packet, we account for 6-byte GPS coordinates (optional), a 6-byte sensor ID, 14 available bytes for collecting multiple data from the node (multiple sensors, including battery status), and a 12-byte timestamp measurement. In conclusion, the packet payload is 38 bytes long; however, it could be reduced to 22 bytes (i.e., 6 bytes for node ID, 4 bytes for sensor data, 12 bytes for timestamp) when considering a single parameter measurement with nodes georeferenced during the installation phase (thus not needing to transmit their positions). Concerning the ACK message, its payload envisages the ID of the node where this ACK and the 12-byte time specification of the delay Δi for the next transmission are addressed, thus resulting in a total length of 18 bytes.
Based on these assumptions and using [
34], the values of
(
Lp,
SF) and
(
LA,
SF) are provided in
Table 3 for the different
SF values, including in the ACK case. A minimum wake-up time of 5 s,
Tw(
SF), is used when it is not possible to detect an ACK in a receiver window.
Figure 8 also shows that if there is a dense sensor deployment, adjacent nodes’ coverage time intervals Δ
vi(
SF) overlap. To avoid transmission collisions, two sensors need to be separated in their transmission times
Ts,i for more than the sensor message transmission time
(
Lp,
SF) plus the time to receive the ACK message from the GW, including the receiver delay window(s),
. We have:
where
Treceiving phase in the worst case can be expressed as [
35,
36]:
having
= 1 s. The other values are shown in
Table 3. For instance,
= 2077 ms.
Let us denote
. Based on (8) and (9), we can determine the minimum distance
dmin among sensors along the path to avoid their transmissions colliding because of the imposed transmission synchronism. If the sensors are not exactly on the UAV’s path,
dmin is considered in relation to the distance of the projections of the sensor node positions along the UAV path. We have:
where
denotes the actual UAV speed depending on the reference speed
vd, the wind conditions, and the sensor position along the path. We need to take the maximum UAV speed at sensor node’s position to consider the worst-case wind conditions.
Figure 11 shows the time durations of sending data and the ACK reception (one communication session for each node), also providing the minimum distance
dmin = 42.8 m when the UAV flies at 70 km/h for
SF = 7.
If the
dmin constraint is met in the sensor deployment on the ground, there are no collisions among sensor transmissions, thus increasing system efficiency; the results for
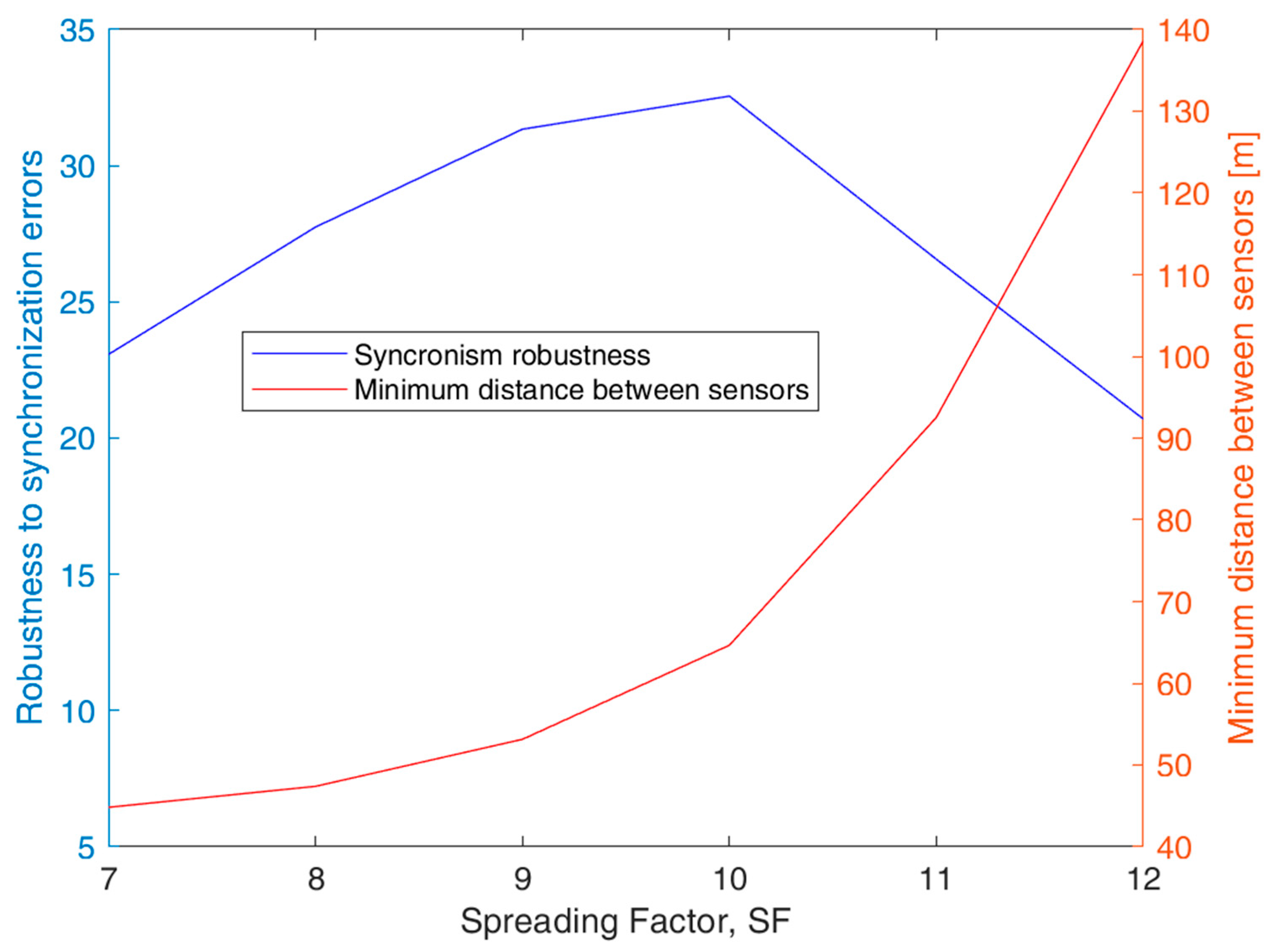
dmin are shown in
Figure 12, together with a parameter
describing the robustness of the synchronization scheme for ground IoT nodes-to-UAV transmissions, defined as
where
is determined according to (1) and (5) with
Pt = 6 dB and
specified in relation to (10). We can motivate the use of parameter
in the following way: the synchronism will be more stringent if
becomes smaller. If
SF increases,
v(
SF) increases,
are becomes larger. The optimal condition for the synchronization protocol is when
is at its maximum.
The results in
Figure 12 show that the best synchronism robustness
η is achieved for
SF = 10; this optimal condition is obtained at the expense of a larger
dmin minimum distance between sensors with respect to the case with
SF = 7. Nevertheless, we can consider that
SF = 10 is the optimal choice for the design of our system. Further proof of the selection of
SF = 10 will be provided in the next section dealing with the analysis of opportunistic connectivity.
As for energy consumption with the synchronization protocol, the power consumption for the LoRa transceiver can be characterized by the current intensity levels in the different states (i.e., transmit, receive, idle, and sleep) and the duration of such states [
32], as depicted in
Figure 13. Based on the work in [
7], where the power consumption of the LoRa transceiver is detailed, it is possible to obtain a duration of about 20 years with a common 2000 mAh battery with
SF = 7,
Pt = 14 dBm and one packet transmission per hour with a packet size between 25 and 50 bytes. For more details and more cases, the interested reader may refer to [
7].
5. Analysis of the Communication Opportunity between an IoT Node and the UAV
This section analyzes the synchronization issues in terms of the probability that the UAV correctly receives a measure sent by a node on the ground. The reference transmission time (with nominal UAV speed vd and nominal UAV departure time t0 = 0) for the generic i-th sensor is T0s,i = . Considering that the UAV has an actual speed v that depends on the wind conditions, the i-th sensor is covered by the UAV in the following time interval of duration Dvi from to , where denotes the time error in the UAV’s launch. In relation to (1), we have adopted the following notation: K(SF) = . We model time ts according to a zero-mean Gaussian random variable with standard deviation ss; let denote the corresponding probability density function. For numerical evaluations, we consider ss = 20 s. Moreover, the UAV speed v is modeled according to the density function fv(v) in (2).
The
i-th sensor node transmits successfully if
(
L,
SF) is within the interval of duration
Dvi. Then, suppose the transmissions of the sensors are kept at times
T0s,i without alterations to take the actual UAV speed into account. In that case, transmissions are successful according to probability
Ps(
di,
SF), characterized as follows:
We have two conditions in (12) that characterize the “event visibility”
Vi of the
i-th node: the first is that the starting transmission time is within the UAV visibility time; the second is that the visibility time also includes the time to receive the ACK. Elaborating on the conditions in (12), we have:
With our numerical settings, it is possible to prove that we have
Then, based on (14), the condition that characterizes the probability in (13) can be simplified as follows:
To determine (15), we condition on the
v value and remove the conditioning using the probability density function
fv(
v) in (2):
Through some elaborations, we obtain the following result:
We consider that this probability decorrelates at multiple passes of the UAV close to the
i-th sensor. Hence, if we have two subsequent passes of the UAV close to the
i-th node (see
Figure 4), the probability of communicating correctly with the
i-th sensor in at least one of the two passes
Ps,2passes(
di,
SF) can be expressed as:
Figure 14 provides the analytical results for
and
numerically determined for
Pt = 6 dB,
x = 5 m, and
SF values of 7 and 10 as functions of the distance
di of the sensor node along the path. This graph also contains the results in the case of no wind (the ideal situation with
v =
vd) when (17) is simplified as follows:
The value of
(19) is also representative of the case when the transmission times of the sensors are resynchronized during a UAV pass for the next one, based on the new expected UAV route and the wind forecasts using time
Di. As noted, using the robustness parameter
in
Section 4,
Figure 14 shows that
SF = 10 provides better results than
SF = 7. In particular, with
SF = 10, the probability of success in a single pass
is 77% at 1 km and decreases to 60% at 5 km. However, with two passes, we obtain much better results with a 94% probability of success at 1 km and an 85% probability of success at 5 km. The results improve and are close to 96% at any distance
di if we consider two UAV passes without winds or using our synchronization method. These results motivate the adoption of our proposed synchronization protocol.
In our study, we can determine
PLoS at the transmission time of the generic sensor at distance
di along the UAV’s path. In our model, the nominal transmission time for the sensor at distance
di along the UAV’s route is set to time
, assuming that the UAV ideally starts to scan its path at time
t0 = 0. The UAV flies with actual speed
v and a departure time offset from time
t0 = 0 equal to
ts. Then, the distance covered by the UAV along its route at the sensor transmission time is
yUAV(
), calculated as:
Based on our assumptions, the generic
i-th sensor transmits when the UAV is at a distance
with respect to the UAV’s nominal position
di. Since this sensor is at a distance
x from the path and the UAV flies at an altitude
H, we can determine the elevation angle
as follows:
where we consider
expressed in degrees.
Because of our model,
depends on random variables
v and
ts. Therefore, if we apply (6) with
given by (21) to express probability
PLoS, this is conditioned on both
v and
ts. We remove the conditioning using a double integral and referring to those configurations of
that allow successful a sensor to transmit when the UAV passes close to it. These configurations of
correspond to the event
Vi that occurs with probability
in (17). We obtain the following result:
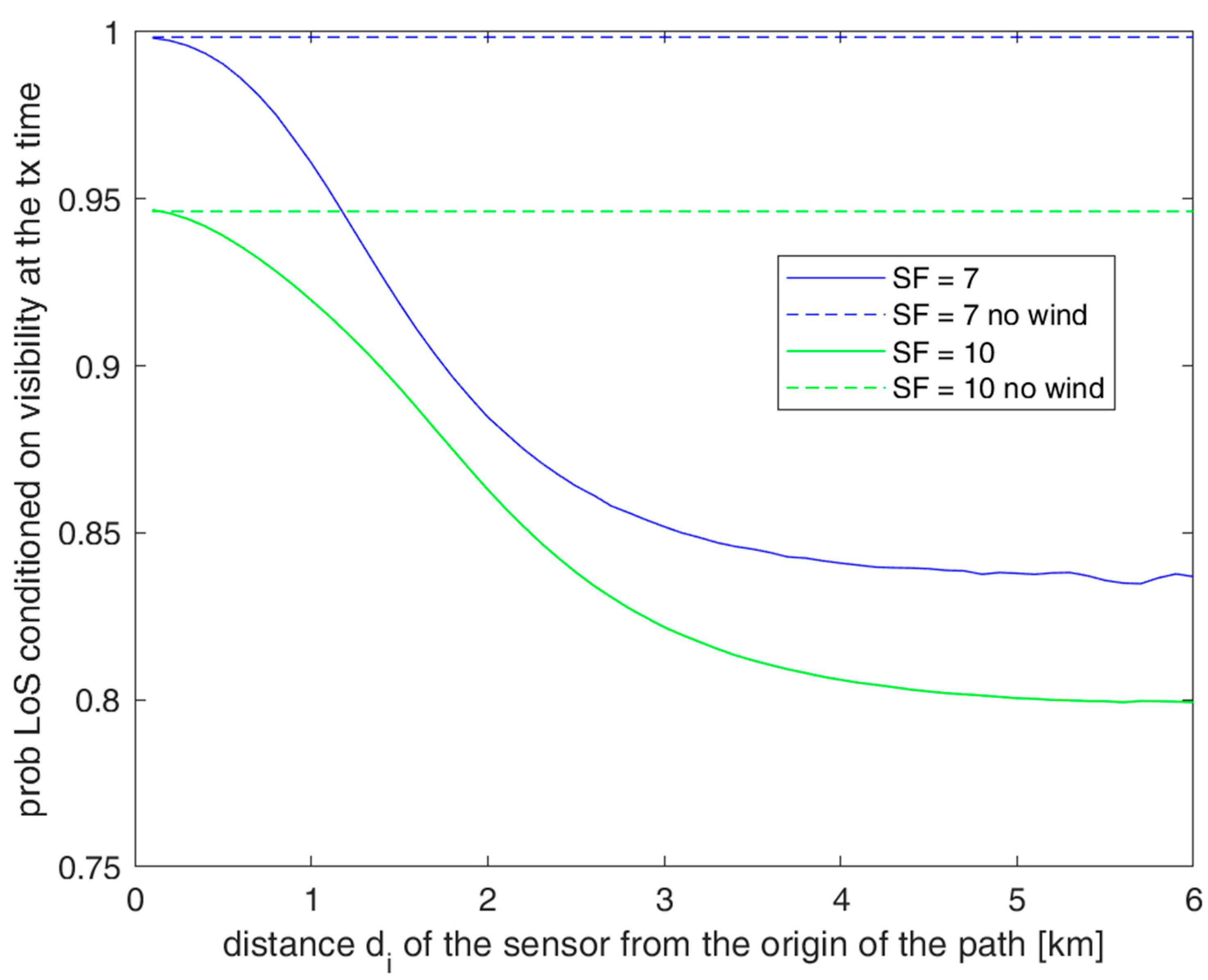
The behavior of
is shown in
Figure 15 for
SF = 7 and 10. This graph also shows the results in the no wind case that also corresponds to the situation when the sensor’s transmission is synchronized with the UAV. As performed by our protocol, we can see that the synchronization scheme permits the sensors to transmit in the best LoS conditions to the UAV. For this type of result,
SF = 7 is better than
SF = 10 since at
SF = 7, the visibility interval and thus the range of
values have a smaller extension around the optimal central value. On the other hand, we have considered here conditioned probabilities
to the UAV in the visibility interval so that, by multiplying
by
to obtain the joint probability of transmission during the interval of UAV visibility and LoS conditions, we have that
SF = 10 is the most convenient choice.
7. Discussion
The work carried out in this paper represents an interesting step toward the study of the communication between ground sensors and a GW flying onboard a UAV. First of all, we have identified LoRa technology as a valid solution to allow communication from low-power sensors to the GW. Second, we have investigated propagation aspects and identified a protocol to synchronize the LoRa node transmissions with the UAV pass, showing some criticalities and preferred settings in terms of the LoRa spreading factor and the transmission power levels for the sensor nodes (i.e., SF = 10 and Pt = 6 dB).
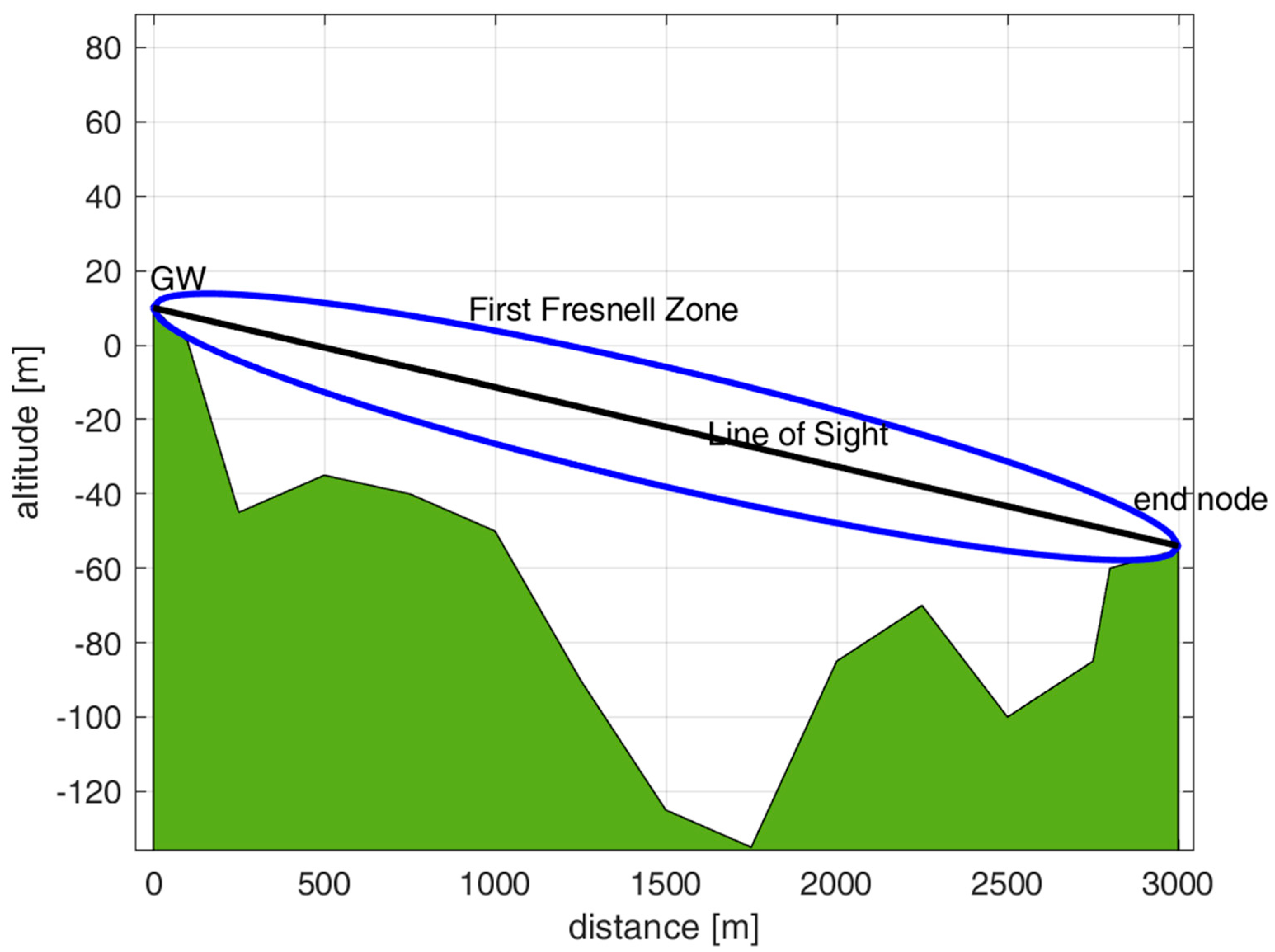
It is difficult to assess a propagation model that is quite general since the actual path loss is strongly influenced by the environmental conditions surrounding the transmitter and receiver and the obstacles between them. In our preliminary path loss study, we highlighted the importance of placing the GW on top of a hill to achieve better LoS with distant nodes. Signal propagation is affected by local reflections, whose impact on the received power level is more significant when the receiver and transmitter are close. Then, an important lesson learned is to investigate the path loss at a distance larger than the so-called cut-off distance to minimize these effects. Further work is also needed to replicate our experiments using a UAV to determine a path loss model for ground-to-air and air-to-ground communications. For such experiments, a rotary-wing UAV is needed to hover over a given position.
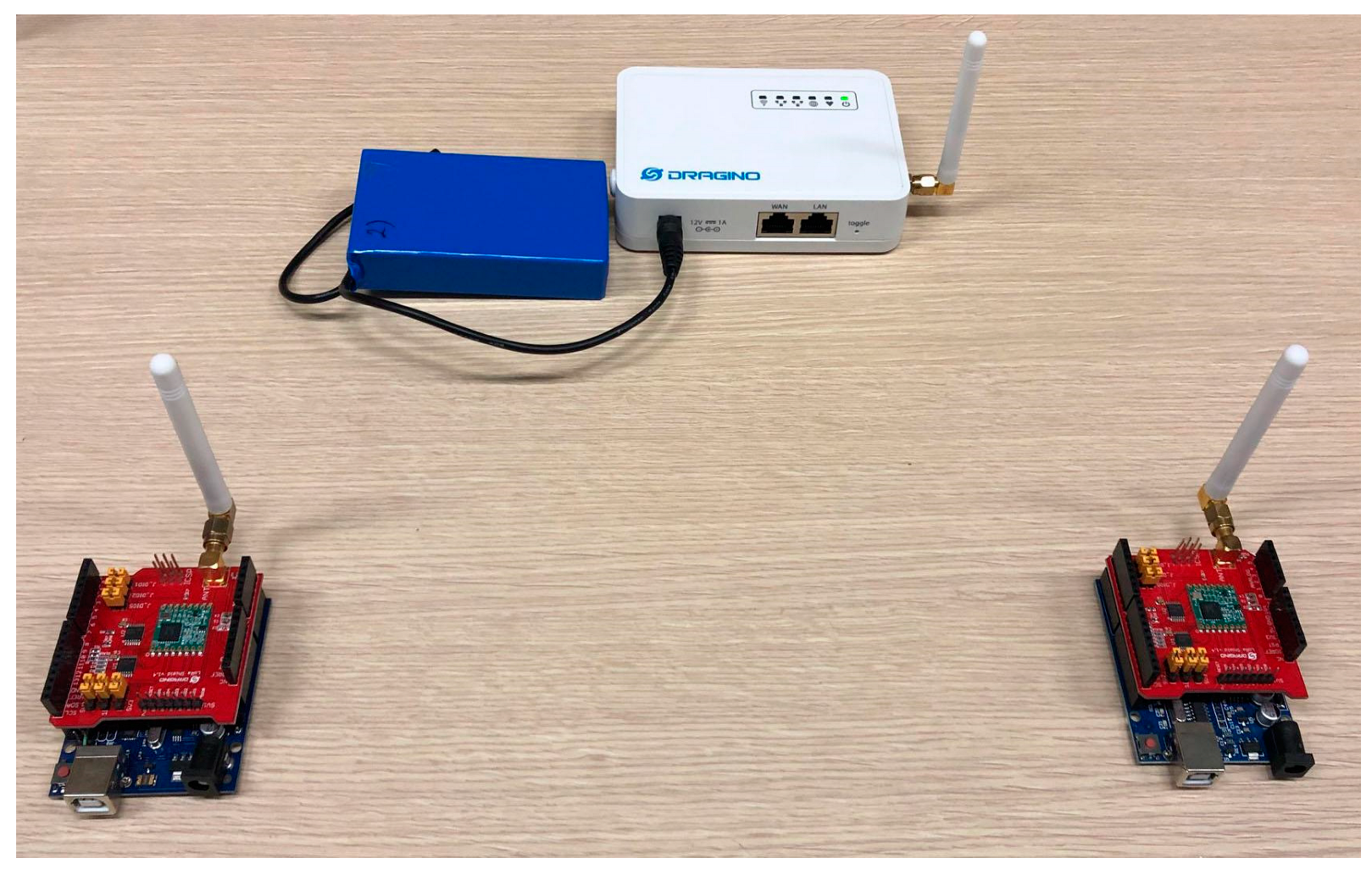
As for limitations concerning the opportunistic protocol, we have addressed only the communication protocol between the nodes and the GW in the laboratory without using a UAV. Another limitation of the correct functionality of the system is represented by meteorological conditions, namely, strong wind and rain events, which affect the UAV’s flight capability and the LoRa communication range. In addition to this, vegetation and the presence of dense trees can reduce the visibility of the nodes and increase path loss propagation, thus requiring a site-specific propagation study.
Further development will be needed to conduct field experiments with UAVs to test the robustness of the synchronization scheme.
Our UAV-based IoT system and the designed synchronization protocol are useful not only for smart agriculture and environmental monitoring but can also be adopted for emergency applications, infrastructure monitoring, rescue operations, and other scenarios involving opportunistic connectivity where coverage infrastructure is missing.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}