5.1. Flight Controller Creating Magnetic Field Noise
Our vehicles use the
rc_pilot_a2sys autopilot originally forked from the open-source
rc_pilot repository by James Strawson and Librobotcontrol (
https://github.com/StrawsonDesign/rc_pilot (accessed on 7 May 2019)).
rc_pilot_a2sys uses a four-stage cascaded PID controller as explained in Section IV.B.1 of [
38]. The controller in this work started with the gains used in [
38]. We then adjusted the gains to reduce noise from the motors and ESCs.
Figure 6 shows magnetometer data from a flight where the UAV (not Q1, but another vehicle of the same construction) flew a single-altitude scanning pattern (
Figure 4) at 1.5 m. The data in
Figure 6 is in the world frame.
Figure 6a (t5_00) is the magnetometer data with the gains inherited from ref. [
38]. Here, the drone moves along the
x axis (4m stride) of the flight space from 21 s tp 26 s, and again from about 34 s to 40 s. During these time segments, there is a large variance in the measured magnetic field due to the flight controller’s motor commands.
Figure 6b (t5_01) shows another instance of the same trajectory, but with new controller gains. The plots are temporally aligned to easily compare corresponding flight segments. At a glance, it is clear that the variance in the magnetic field measurements is much lower in
Figure 6b than in
Figure 6a, but not completely gone. This is most evident in the “Mag Y–World” plot of
Figure 6b, where the drone moves along the
x axis (4 m stride) of the flight space from 21 s to 26 s and again from 34 s to 40 s.
As explained in Section IV.B.1 of ref. [
38], we use a four-stage cascaded PID controller with an outer loop that operates on position error and an inner-most loop controlling angular rate error. The math for the inner loop is shown below in Equation (
11)
where
is the desired torque for roll
,
are the
P,
I, and
D gains for the fourth-stage controller along the roll axis,
is the desired roll rate, and
is the measured roll rate from the gyroscope. There are similar fourth-stage PID loops for pitch (
) and yaw (
) rates, respectively.
The ‘noisy’ gains, inherited from [
38], used
while the modified ‘quiet’ gains set all three of these values to 0. This change alone is responsible for reducing motor-induced noise in
Figure 6.
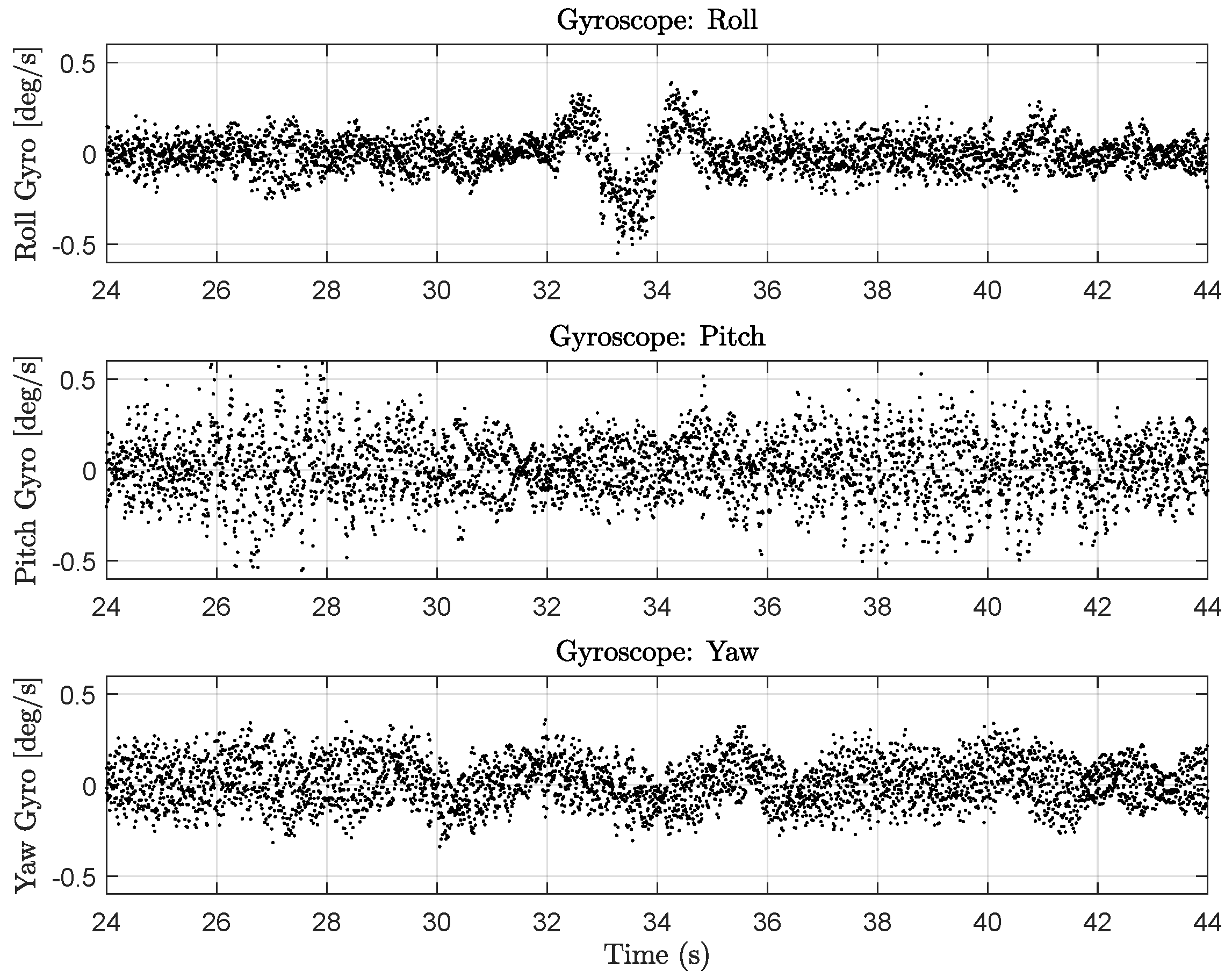
The derivative term of the attitude rate controllers (e.g., Equation (
11) for roll rate) uses numerical derivatives of gyroscope measurements (
Figure 7) as part of their computation. As the quadrotor flies, the propellers induce vibrations that make the gyroscope (and accelerometer) measurements rather noisy. Taking numerical derivatives of these noisy gyroscope measurements causes the motors to be commanded with high-frequency inputs that induce measurable electromagnetic noise. We believe this problem is amplified as the total amount of current pulled from the 4S batteries increases. This would explain why the magnetometer variance is larger during the 4 m,
x-axis stride (with a max commanded velocity of 0.75 m/s for this set of tests) than during the 0.25 m,
y-axis stride (max commanded velocity of 0.47 m/s).
Aside from changing controller gains, other possible solutions include commanding less-aggressive maneuvers during flight tests, moving the magnetometer further from the motors and ESCs (
Section 5.2), or time-varying magnetometer calibration [
35]. In addition, from some preliminary data gathered when trying to understand this problem, we believe that differences in motors and ESCs (even those of the same make and model) may create different magnitudes of measurable magnetic noise.
The remainder of this paper uses only the ‘quiet’ controller gains. Please note that the analysis for this section used
= 2 cm (
Figure 3b).
5.2. Identifying and Mitigating Flight-by-Flight Variation
The flight controller generates high-frequency magnetic field noise from the motors, but another magnetic anomaly causes variation in the measured magnetic field from flight to flight. Variance refers to the spread of points around a mean. In the last section, we reduced the variance of motor-induced magnetic noise by removing derivative gains from a PID loop in the flight controller. To avoid confusion, we use "variation" to describe differences in the magnetic field between subsequent flights of the same trajectory. These differences are not uniformly spread around an average signal, as we will explain in this section.
Section 5.2.1 explains our testing procedure for investigating the flight-by-flight variations, while examples are given in
Section 5.2.2. Next, we investigate two sources of the variations in
Section 5.2.3 and
Section 5.2.4. Finally, we show how distancing the magnetometer from the other electronics reduces the variation in
Section 5.2.5.
5.2.1. Testing Methodology
To measure variation across pairs of flights, Q1 flew several repetitions of the 1.5 m single-altitude scanning trajectory (
Figure 4). Initially, we believed that each 4S LiPo battery provided a different amount of “resting current” to achieve the same flight maneuver as another 4S battery. For this, each battery started at full charge, and Q1 flew the same 1.5 m scanning trajectory several times in a row. This lets us test whether the flight-by-flight variations were due to the battery’s voltage during a flight. After a few repetitions with the first 4S battery, a new (fully charged) 4S battery was used to power Q1.
Three Turnigy 4S 2650 mAh 20C batteries (denoted as #02, #04, and #14) were used for this analysis. The charge/discharge and storage history of these batteries is largely unknown, as they have been used for several projects since their purchase in May 2021. The only thing we could rigorously control is fully charging each battery to 16.8 V just before a series of flight tests.
For this analysis, each flight was downsampled to 10 Hz or 2 Hz to reduce spatially redundant observations resulting in ∼900 or ∼180 observations, respectively, for each flight.
Figure 4 shows the observation set from one flight with 10 Hz and 2 Hz downsampling. Although 10 Hz clearly shows better coverage of the flight space, the RMSE values for this analysis changed by at most 0.03 µT on the
= 8 cm dataset when training on 10 Hz vs. 2 Hz downsampling sets. Thus, we sometimes use 10 Hz downsampling to illustrate specific points, but typically use 2 Hz downsampling for faster training and validation of the magnetic field maps.
The goal is to test the consistency of magnetic field measurements across pairs of flights. The ambient magnetic field is not likely to change over the course of a few hours. Thus, any variation between pairs of flights can be attributed to UAV-generated magnetic noise.
5.2.2. Examples of Flight-by-Flight variations
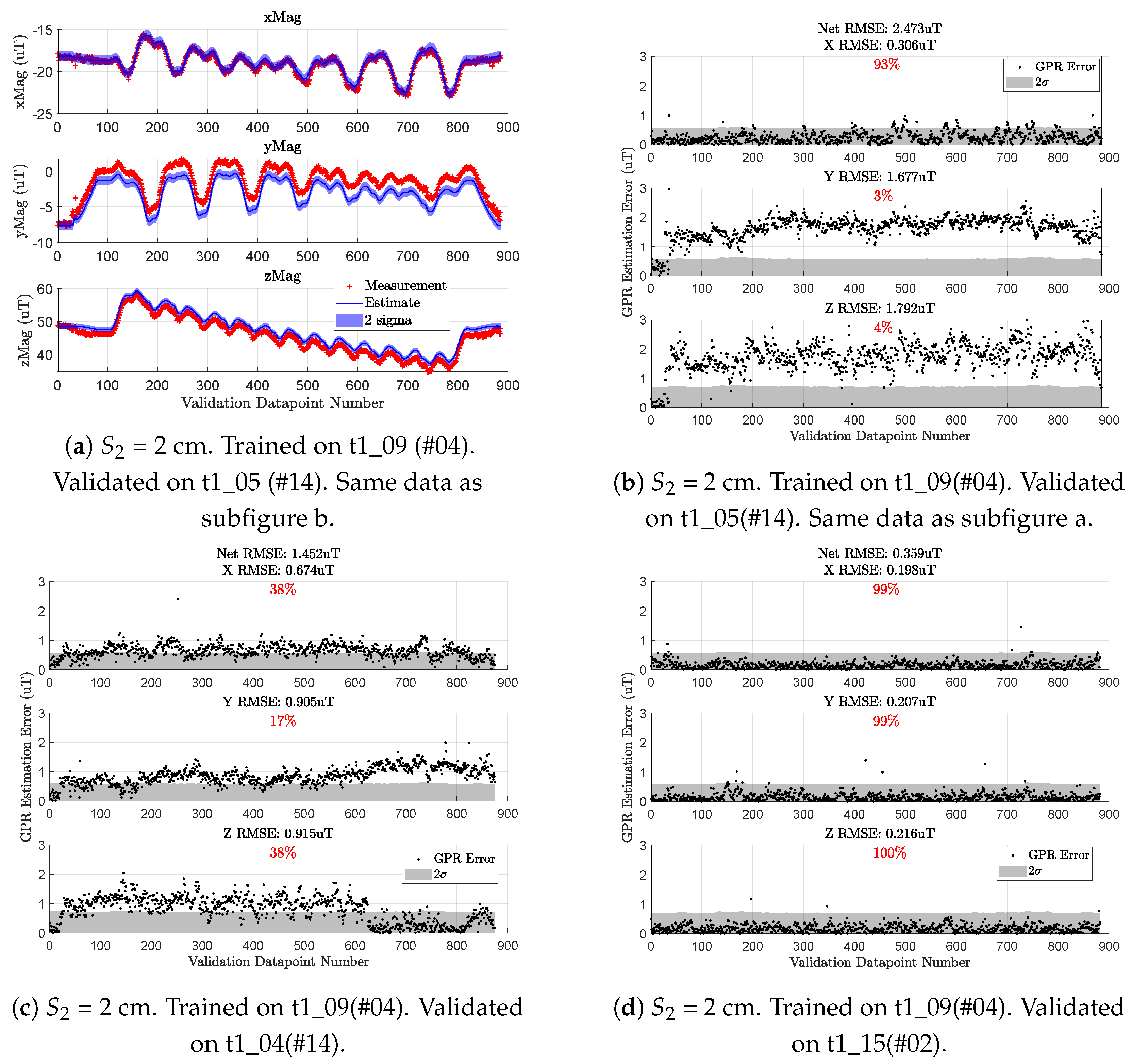
By training the map on a single repetition and validating on another, we get data similar to that in
Figure 8, which has two types of plots.
For the first type (e.g.,
Figure 8a), each magnetometer measurement from the
validation dataset is shown as a red cross. The blue line is the GPR’s predicted mean at the drone’s position. The blue shading around the solid blue line depicts the two standard deviations (
) of the GPR’s uncertainty with its prediction.
Figure 8b depicts a black dot as the error between the red cross and blue line while the GPR’s
uncertainty is the gray shading. Here, we plot the absolute value of the error since the sign of the error does not indicate anything of interest. The percentage in the grayscale plots depicts how often the black dots (GPR error) are within the gray shading (GPR’s
uncertainty).
In
Figure 8, the map is trained on 2 Hz-downsampled observations from flight t1_09 and validated against 10 Hz-downsampled observations from three flight tests of the same t1 series. These three validation examples are generally representative of the different flight-by-flight magnetic field anomalies we have seen.
Figure 8b shows a relatively large steady-state prediction error throughout,
Figure 8c has a steady-state error that changes partway through the flight, while
Figure 8d is an ideal case where the mapping and validation flights have agreeable measurements.
We refer to this anomaly as “flight-by-flight variation” because the error between pairs of flights is not distributed around some mean bias value. For example, flight t1_09 had similar magnetic observations as t1_15 (
Figure 8d) yet starkly different observations than t1_05 (
Figure 8b). Further complicating the matter are cases such as t1_04 (
Figure 8c) with a time-varying bias.
There is evidence in
Figure 8 that suggests these magnetic anomalies are caused by the ESCs and motors. The initial black dots in
Figure 8b,c have low error before the anomalous bias takes effect. These beginning points are observations gathered when the drone rests on the ground. This suggests that before the motors and propellers are spinning, the observations from t1_05 and t1_04 are similar to those from t1_09.
This discussion would benefit from an experiment we could not conduct safely. The idea is to constrain the UAV and compare magnetometer data across two cases. One case with the motors off and another where they are spinning. We attempted this without the propellers and found no appreciable change in the bias of the measured magnetic field. Adding propellers increases the current draw required for the motors to maintain a certain angular velocity and more accurately emulates actual flight conditions. However, given our test equipment, we could not safely constrain a UAV whose propellers are spinning.
5.2.3. Changes in Ambient Magnetic Field
This section presents evidence that the magnetic field variation in
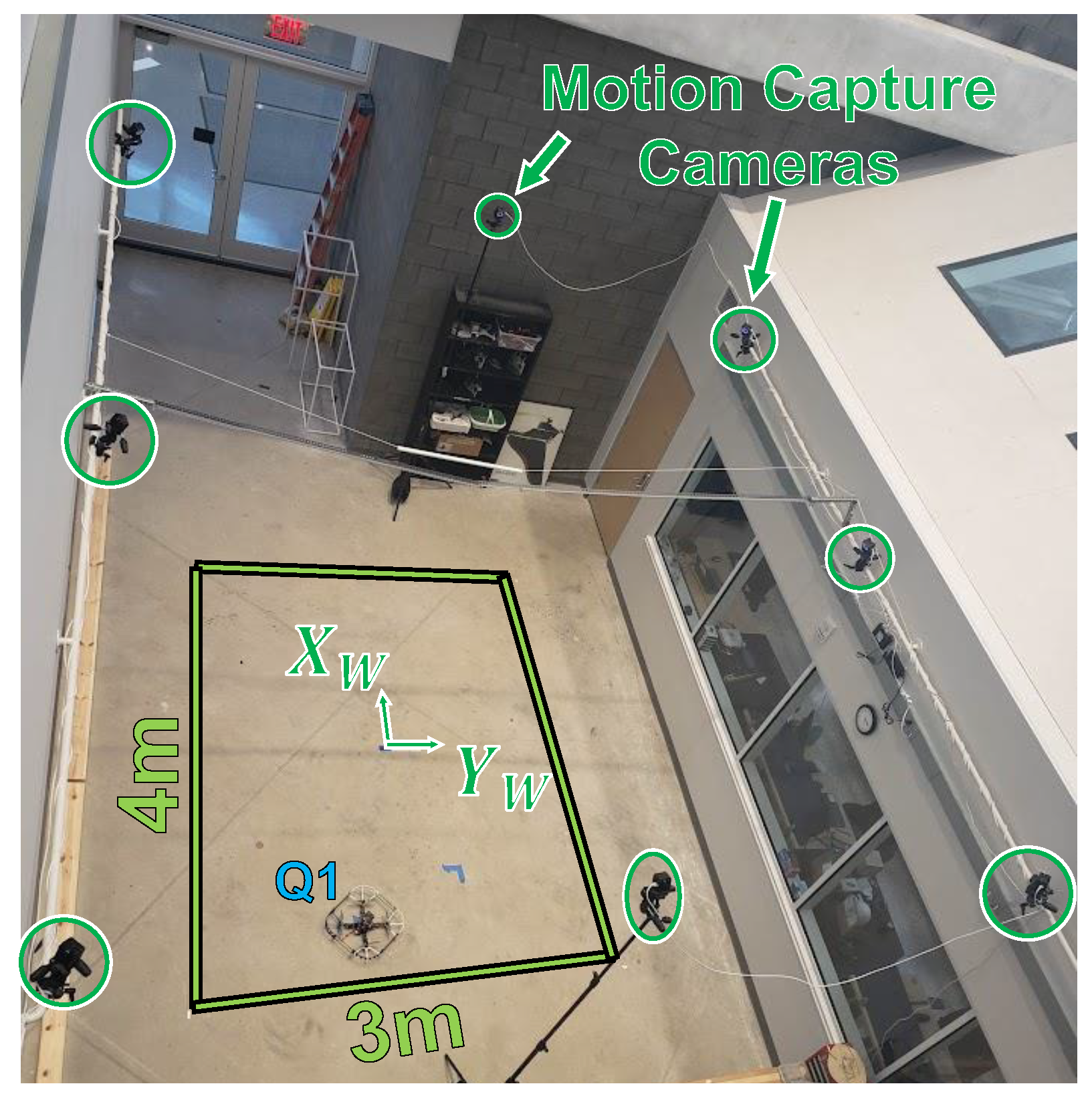
Figure 8 is not caused by changes in the ambient magnetic field. To measure changes in the ambient magnetic field, we placed a stationary RM3100 magnetometer under a workbench at approximately (−3.5 m, +2.5 m) as defined by
Figure 2. This stationary magnetometer was sampled every 10 s (0.1 Hz) by a BeagleBone Blue from July 2022 through February 2023. The BeagleBone is powered by a portable power bank charged at a wall outlet. The power bank allows for continuous measurements through brief power outages in the workspace.
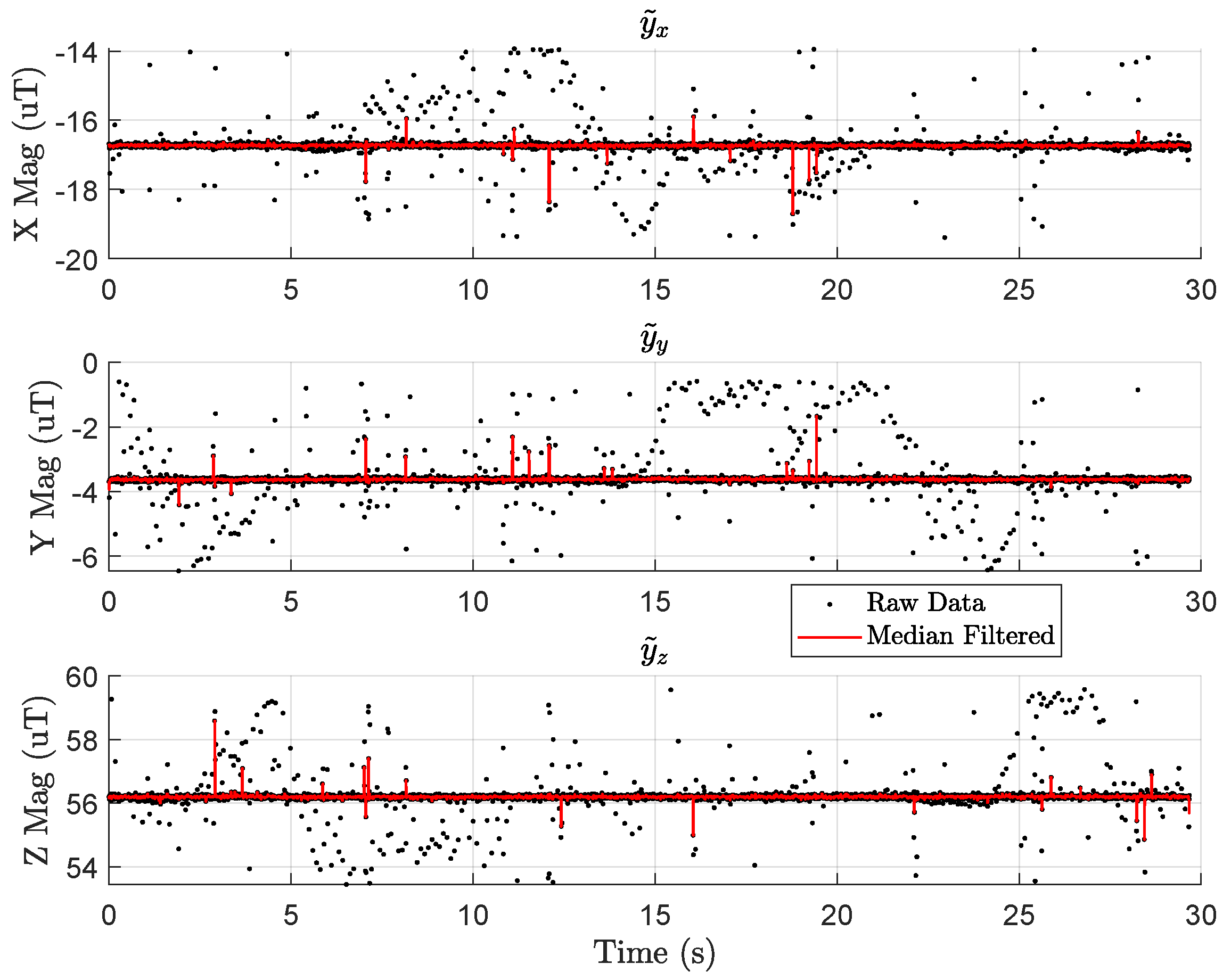
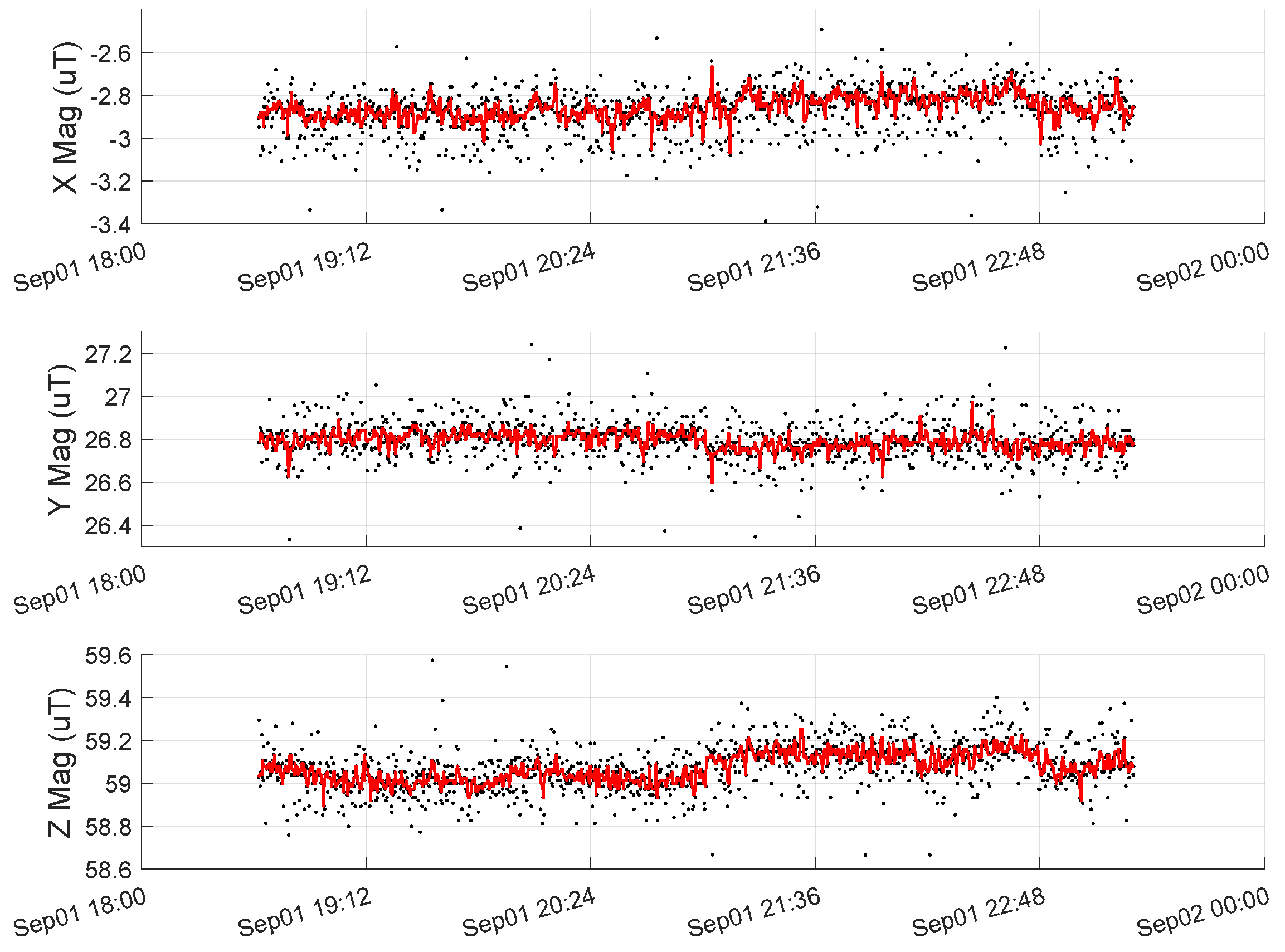
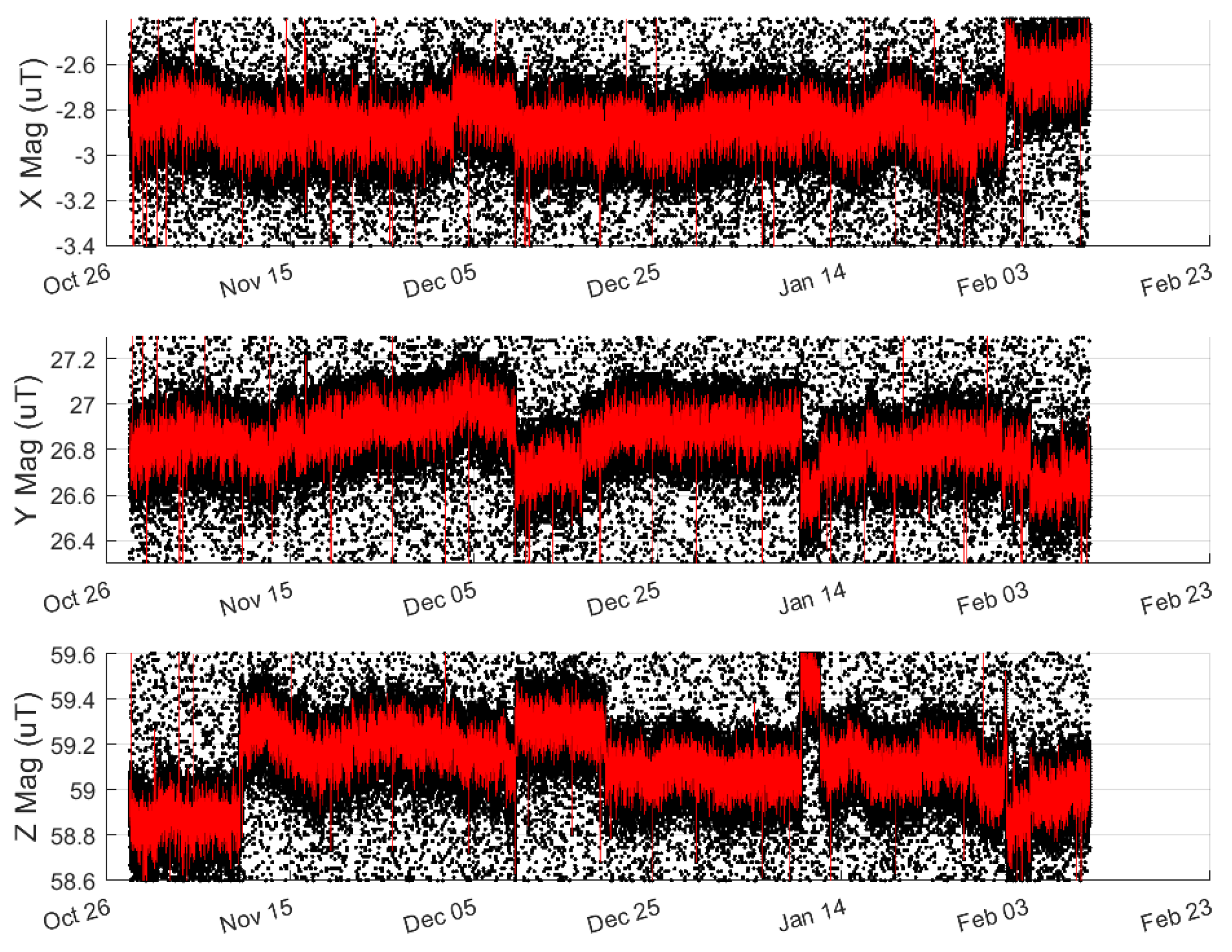
Figure 9 shows approximately 3 h of data gathered during the t6 series of flight tests on 1 September 2022. Raw data are depicted as black dots while median-filtered data (with a window size of five) is shown as a red line. As in
Figure 5, there are several spurious measurements that span ±3 µT. In
Figure 9, the outliers are cropped to emphasize the average signal.
Figure 9 shows that the mean signal of each axis drifts by no more than 0.2 µT. For reference, the variance of the raw data (including cropped outliers) is 0.13 µT
, 0.09 µT
, and 0.10 µT
for each respective axis. By contrast, the variations in
Figure 8b exceed 1.8
for the
z component of the field. This paper assumes the ambient field is constant over any given day. In practice, it only needs to remain constant over a single flight test series (several hours), supported by the data in
Figure 9. With this, we conclude the flight-by-flight variations depicted in
Figure 8 are caused by UAV-induced magnetic noise and not by changes in the ambient magnetic field.
The data from
Figure 9 was gathered on 1 September 2022, while the data in
Figure 8b was gathered on 17 June 2022. We do not have stationary magnetometer data from 17th June (the t1 flight test series) to directly compare with the variation in
Figure 8. However, the stationary magnetometer data from September 1st in
Figure 5 is generally representative of the ambient magnetic field measurements at that location. Further analysis of the eight months of stationary magnetometer data is presented in
Appendix B.
5.2.4. LiPo Batteries and Magnetic Variation
Initially, the data from the t1_XX flight tests (
Section 5.2.2) led us to conclude that the flight-by-flight variations were due to differences in batteries. The motors and electronic speed controllers (ESCs) use the most power on the UAV. When electrical current moves through wires, it induces a magnetic field quantified by the Biot–Savart law. In addition, a battery with lower voltage must provide higher current to achieve the same power output. In addition, if we fix the power required throughout a flight test, a battery with lower voltage should source more current than a battery with higher voltage. Together, these properties imply that the induced magnetic field from the UAV’s motors and ESCs should increase as battery voltage decreases. We designed experiments (
Section 5.2.1) to investigate this idea. However, the data did not clearly prove or disprove our hypothesis.
During the t1_XX flight tests, each of the three batteries (#02, #04, and #14) flew five consecutive repetitions of the same trajectory (
Figure 4). The voltage on battery #04’s first flight ranged from 16.4V to 15.4V while the last repetition ranged from 15.4 V to 14.6 V. There are similar voltage ranges across the five repetitions for batteries #02 and #14. From voltage data alone, we expected all three batteries to behave similarly.
The results show that battery #14 had over 1 µT of variation between its five repetitions, seeming to indicate our hypothesis had merit. Perhaps the gradually decreasing voltage changed the magnitude of the induced magnetic field. However, batteries #04 and #02 had nearly 0.1 µT of variation between their five respective repetitions despite having a similar change in voltage over the five repetitions.
We then thought that battery #14 was less “healthy” than the others. Perhaps its capacitance, impedance, or another property differed noticeably from batteries #04 and #02. If this were true, battery #14 should induce larger variations than the other batteries. However, future tests with battery #14 give pairwise variations of about 0.1 µT as we see with batteries #04 and #02.
Overall, we could not decisively prove or disprove our hypothesis on the relationship between the flight-by-flight variations and battery voltage. Additionally, we did not find a consistent trend between each individual battery and the resultant magnetic variation. For this, we chose to reduce the impact of magnetic variation by moving the magnetometer further from the sources of magnetic noise.
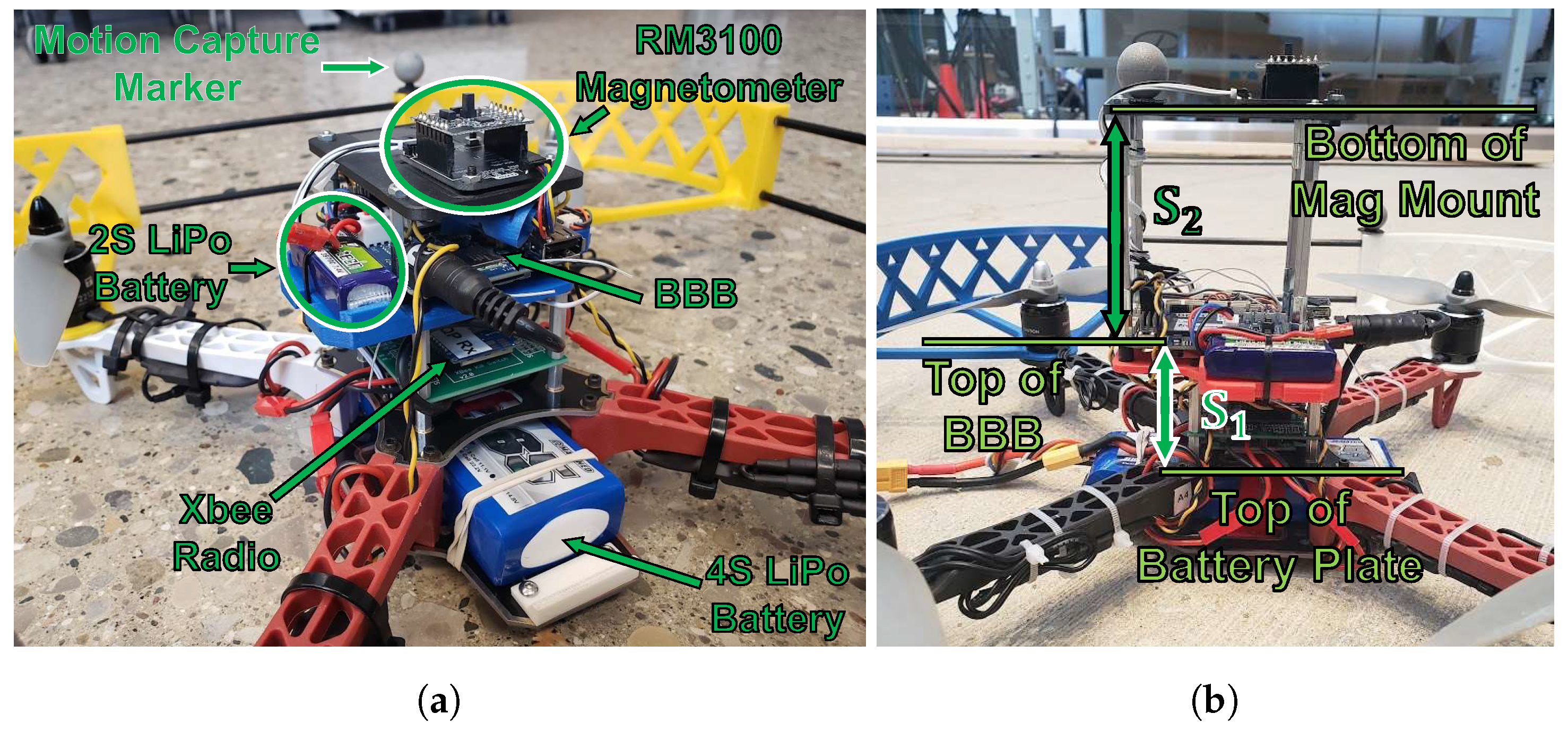
5.2.5. Varying : Distance from Magnetometer to Electronics
Many works, such as [
27,
28], demonstrated that creating distance between a magnetometer and onboard electronics can reduce noise. In this section, we show how the magnitude of the flight-by-flight variations decrease as
increases. Recall that
is the distance between the magnetometer and the other electronics on the UAV (
Figure 3b).
We flew 60 repetitions of the 1.5m-scanning trajectory from
Figure 4 over four test sessions (t1_XX, t2_XX, t3_XX, and t4_XX). Each corresponds to a different value of
(2 cm, 4 cm, 6 cm, and 8 cm). For each test session, we trained the map on the
first battery #04 flight and validated the map on all flights of the same test session.
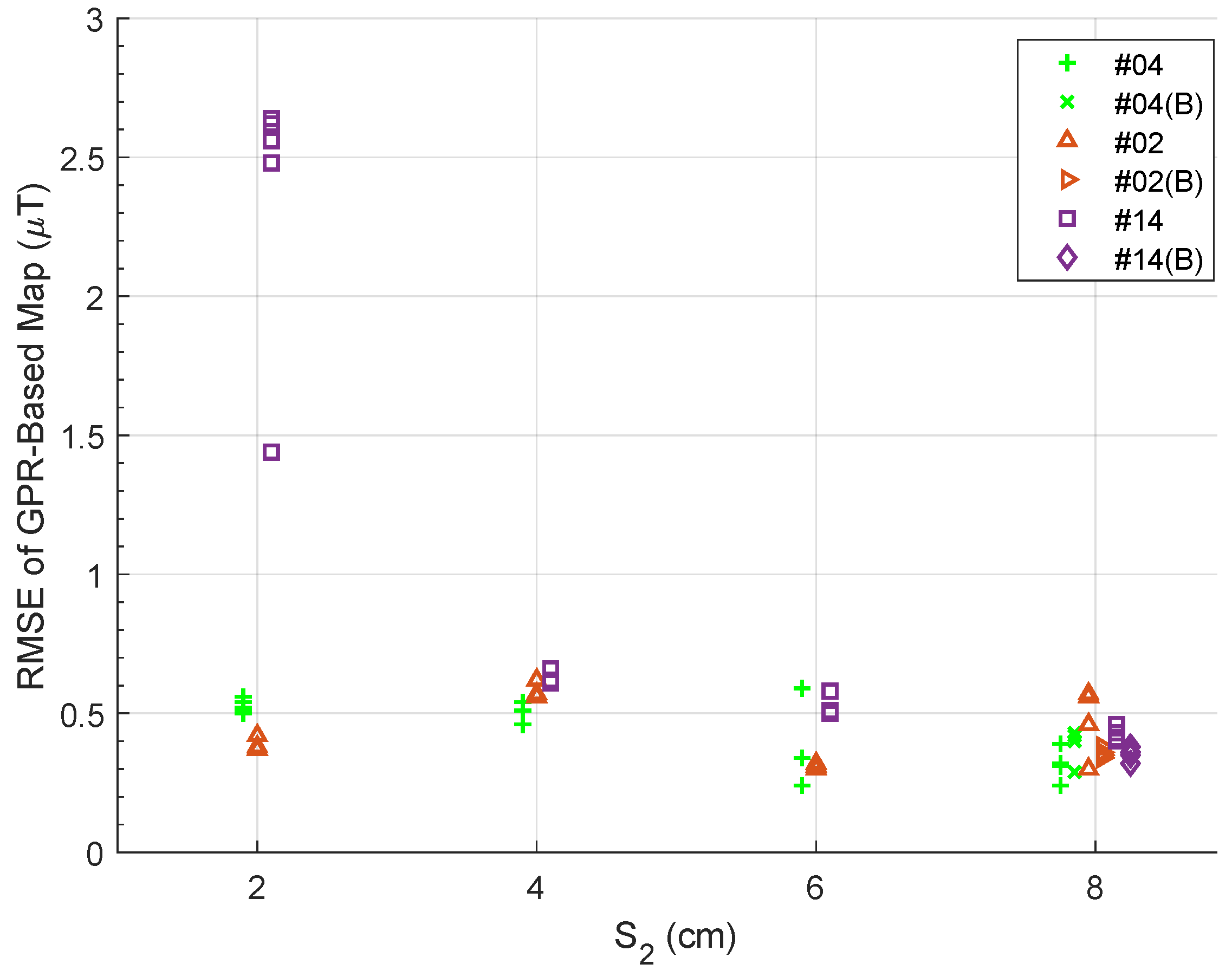
Figure 10 summarizes the data of this 60-flight analysis. The horizontal position of each point is the value of
as 2 cm, 4 cm, 6 cm, or 8 cm. Any horizontal deviations from these discrete values are only for visual clarity and do not reflect any deviation in the actual value of
. The vertical axis is the vector RMSE of all three GPRs (Equation (
9)). Finally, the colors and symbols identify which battery was used for each repetition with a green + for battery #04, an orange △ for #02, and a purple □ for #14.
At = {2, 4, 6, 8} cm, each battery flew N = {5, 4, 3, 8} repetitions of the 1.5 m scanning trajectory. For = 8 cm, each battery started at full charge, flew four consecutive reps, was re-charged, then flew four more repetitions. We depict the second charge of each battery in the = 8 cm dataset with a rotated +, △, and □, respectively.
Figure 10 shows that increasing
makes the observations of each flight more consistent with one another. Since the GPR-based map (for each
) is trained on a battery #04 flight, the scatter plot shows us the magnitude of the flight-by-flight variations relative to an arbitrary battery #04 flight. As we increase
, the variations tend towards a difference of about 0.3 µT to 0.5 µT.
Please note that for each value , there is a single green + that is validated by the same observations used to train the map. Even so, there are no RMSE values below 0.3 µT. This may be a limit to how accurate maps can be with our testing platform, which would include inaccuracies due to sensor noise (a function of the 200 Hz sampling rate) and any electromagnetic noise the quadrotor generates.
We take a moment to point out a flawed conclusion we stated in our previous work. In Figure 10b of [
9], observations from a rectangular trajectory (the first ∼500 points) are validated on a GPR-based map. In that figure, there is about 2 µT of an error on each of the
x and
z GPR validation sets except before takeoff and after landing. In [
9], we hypothesized that this error was caused by a pitch misalignment in the magnetometer for that single flight (relative to the pitch angle for all the other flights). However, if this were the case, there likely would not be the brief moments of agreement before takeoff and after landing as shown in Figure 10b of [
9]. With what we have learned in this work, we believe that was an example of flight-by-flight variation.
Our work in [
9] used a different M330 quadrotor whose parts may have produced less magnetic variation between flights. Alternatively, it could be that the nature of attitude estimation (the focus of [
9]) is robust to 2–3 µT variations between flights if such anomalies do not significantly change the angle of the ambient magnetic field (which has a magnitude of 40–70 µT in our workspace). Thus, it is likely that these variations were simply less salient in [
9] given the previous application of attitude estimation.
Although increasing
decreased measured variation, we are still left with ∼0.3 µT of variation between pairs of flights. We believe time-varying magnetometer calibration could further reduce flight-by-flight variation. In [
35], they use measurements of the electric current near high-powered devices to estimate and offset vehicle-induced magnetic fields from their measurements. However, our vehicle does not have any electric current sensors, so such a solution is out of reach for our platform. Instead, we use the “compromise map” to reduce the influence of these variations on the resultant magnetic field map.
5.3. Accuracy of Compromise Map
In this section, we propose a solution to the flight-by-flight variations that incorporates data from several training flights into a single magnetic field map. Since each flight has a chance of giving a different bias in the measured magnetic field, the GPR-based map will overfit if trained on a single flight test. Thus, we instead, use observations from many flights that span the working volume to create an “intermediate map” that optimizes hyperparameters and predicts with the observations. The compromise map then uses the intermediate map’s estimates at user-selected locations to predict the magnetic field using only points. The goal of this section is to see how the accuracy of the compromise map varies as a function of .
5.3.1. Multi-Altitude Trajectories
This section uses data from eight different flight tests listed in
Table 1 where the first four flights are typically used for
training the map while the remaining four are used for
validation. The trajectories listed in
Table 1 are all multi-altitude tests where each single-altitude slice is the same trajectory from
Figure 4. “Lower Four alts.” flies at altitudes
−0.5, −0.75, −1.0, −1.25] m, “Upper Four alts.” at
−1.5, −1.75, −2.0, −2.25] m, “Scan-
” at
−0.5, −1.375, −2.25] m, while “Scan-
” and “Scan-
” fly at
−0.75, −1.5, −2.0] m. The idea is to gather redundant observations throughout the working volume that allow the map to learn the flight-by-flight variations.
Additionally,
Table 1 lists the number of 2 Hz-downsampled observations from each flight. The number of 4 Hz and 10 Hz observations are approximately
and
the values listed in
Table 1.
5.3.2. Intermediate Map Accuracy
To start, we demonstrate the value of adding observations from many flights to a GPR-based map. We call maps that are trained on observations from multiple flights an intermediate map.
Table 2 gives the performance of a multi-altitude magnetic field map trained on
(2 Hz downsampling) observations from flight test t6_21 and validated on observations from four different flight tests. The second major column lists the vector RMSE (µT) of all three GPRs along with the RMSE of each
x,
y, and
z GPR, respectively. The third major column quantifies how often (as a percentage) an error data point lies within the 2
uncertainty of the respective GPR. The performance metrics from the second and third major columns are the same as those listed in the grayscale plots of
Figure 8.
The map from
Table 2 has overfit to observations from flight t6_21. In
Section 5.2, we showed that there are flight-by-flight variations in the measured magnetic field. By training on a single flight, we prevent the map from learning to account for these flight-by-flight variations. Please note that training the map on
observations (10 Hz downsampling) from t6_21 gives norm RMSE values of 0.629 µT, 1.034 µT, 0.751 µT, and 0.552 µT when validating on t6_04, t6_05, t6_06, and t6_20, respectively. Thus, simply increasing the number of training samples from a single flight test does not improve the map’s performance.
By comparison,
Table 3 uses
observations (2 Hz downsampling) from four different flight tests: t6_00, t6_01, t6_03, and t6_21. Please note, in
Table 1, that we are now training and validating on one instance each of all four types of flights conducted for this analysis: lower four altitudes, upper four altitudes, scan-
, and scan-
. By comparing
Table 2 and
Table 3, we see that adding observations from a
variety of flights uniformly reduces RMSE and increases the frequency that error falls within each GPR’s 2
error (usually caused by an increase in each GPR’s uncertainty).
Additionally, training on
observations (10 Hz downsampling) from the four training flights gives norm RMSE values of 0.497 µT, 0.686 µT, 0.406 µT, and 0.408 µT when validating on t6_04, t6_05, t6_06, and t6_20, respectively. Again, and surprising in this second case, adding more observations from the same ensemble of training flights does not necessarily improve the map’s performance. However, it is clear that training on multiple flights (
Table 3) is better than training on a single flight (
Table 2).
Aside from the 2 Hz vs. 10 Hz comparisons performed in this section, we do not aim to directly address ways to reduce the cost of training hyperparameters. Instead, we focus on the inference cost with what we call a compromise map.
The idea is to query the intermediate map at
user-selected locations
in the working volume. The intermediate map’s estimates give us a set of “measurements”
which (together with
) form the “observations” used by the compromise map to perform inference. Please note that the compromise map will use the same hyperparameters from the intermediate map for its inference.
Section 4.4 gives a more detailed explanation of the process of creating a compromise map from an intermediate map.
5.3.3. Intermediate Map vs. Compromise Map
We now compare the accuracy of the intermediate map, which uses observations (2 Hz downsampling) to perform inference, to that of the “compromise” map, which uses only inference points. Recall that both use the same sets of hyperparameters optimized over observations.
The user-selected locations for this analysis are chosen as follows. Points are distributed evenly through the [−2, 2] m x axis span, [−1.5, 1.5] m y axis span, and [−2.25, −0.5] m z axis span of the working volume. A compromise map location is selected every 0.5 m, 0.5 m, and 0.25 m for the x, y, and z axes, respectively. In total, this gives 504 locations within the working volume. The remaining seven points are evenly spaced from the ground to an altitude of 0.5 m, so the compromise map has some observations during the takeoff and landing sequence above the origin. The number is an important constraint for another toolbox we used for position localization. Thus, this spatial discretization (0.5 m × 0.5 m × 0.25 m) became a common test state in our work.
Figure 11 is similar in style to the grayscale plots from
Figure 8, but with the subplots as three columns rather than as three rows. This format fits more figures on a single page to more easily compare the intermediate and compromise maps.
Figure 11 shows data for the intermediate map on the left column and the compromise map on the right. Here, we see the compromise map has both quantitatively and qualitatively similar performance to the intermediate map despite using nearly a fourth of the points for inference. By comparing the norm RMSE values (in the titles) across the two columns of
Figure 11, we see the two maps are never off by more than 0.013 µT (13 nanoTesla) in norm RMSE. This difference is within the noise of the magnetic field measurements of our platform.
For reference, training a map on 408 observations (2 Hz downsample) from t6_21 and validating this map on the same 408 observations gives RMSE values of (0.196 µT, 0.089µT, 0.108 µT, 0.136 µT) for norm, x, y, and z RMSE values, respectively. This means that the map cannot discern differences of 0.013 µT even when it has overfit for the exact observations it will be validated on.
Thus, we take the differences between the intermediate map (
) and the compromise map (
) in
Figure 11 to be negligible and assert that their RMSE performance is effectively identical.
Of course, a lot of valuable information can be lost by simply comparing RMSE values. However, visual comparison across the two columns of
Figure 11 further emphasizes that both the intermediate and compromise maps yield very similar prediction results. The key difference is in the uncertainty of the two maps.
It is easiest to see this in row three (
Figure 11d vs.
Figure 11e) where the compromise map (right) has spikier gray shading (2
uncertainty) than the intermediate map (left). The compromise map’s increased uncertainty is primarily due to the choice of prediction locations
which have 504 points selected from a (0.5 m × 0.5 m × 0.25 m) spatial discretization of the working volume. Recall that each altitude of our validation trajectories traverses lanes separated by 0.25 m (
Figure 4). Thus, anytime the compromise map is queried at a location between the (0.5 m × 0.5 m)
x–
y points, it will report a higher uncertainty in its predicted magnetic field estimate.
The overall increased uncertainty of the compromise map also explains why the respective GPR errors more frequently fall within two standard deviations of their respective uncertainties. In other words, the plots on the right column of
Figure 11 will almost always have higher red percentages than the comparative GPR on the left column given the selected spatial discretization of (0.5 m × 0.5 m × 0.25 m).
This section showed how to avoid overfitting by training a map on data from many flights. It then introduced the compromise map to fix the number of prediction points at . We find that the compromise map maintains comparable performance to the intermediate map yet has faster runtime from the fixed number of prediction points. The next section will further investigate how the spatial density of the points affects the performance of the compromise map.
5.4. Compromise Map—Spatial Density Analysis
This section seeks to understand how the accuracy of the compromise map changes as a function of the spatial density of the locations used in . Generally, we expect GPR error to increase, the number of error points captured by 2 uncertainty to increase, and the computation time to decrease as the training set points become more sparse. This section analyzes the first two trends.
In the last section, the compromise training points came from a custom spatial density of (0.5 m × 0.5 m × 0.25 m) which gave 504 locations, plus an additional seven locations to have observations along the takeoff and landing segment for each flight. In this section, we work with a uniform spatial density in all directions (S × S × S). To simplify matters a bit, we use a naive linear spacing of [] for the locations along each respective spatial axis of the lab. This means that different spatial densities S can yield the same number of points but at different locations. Recall that our working volume has spatial limits of [−2, 2] m in x, [−1.5, 1.5] m in y, and [−2.25, −0.5] m in z.
We vary
S from 0.2 m to 1 m to emulate a study performed in [
4]. However, our study quantifies the RMSE of the magnetic field map rather than relying exclusively on visual comparisons of the map. For the 17 values of
S tested (in increasing order),
= [3031, 1775, 931, 655, 447, 259, 259, 199, 133, 112, 97, 97, 79, 67, 47, 47, 47]. Recall, seven of the
values listed here are for the takeoff and landing sequence.
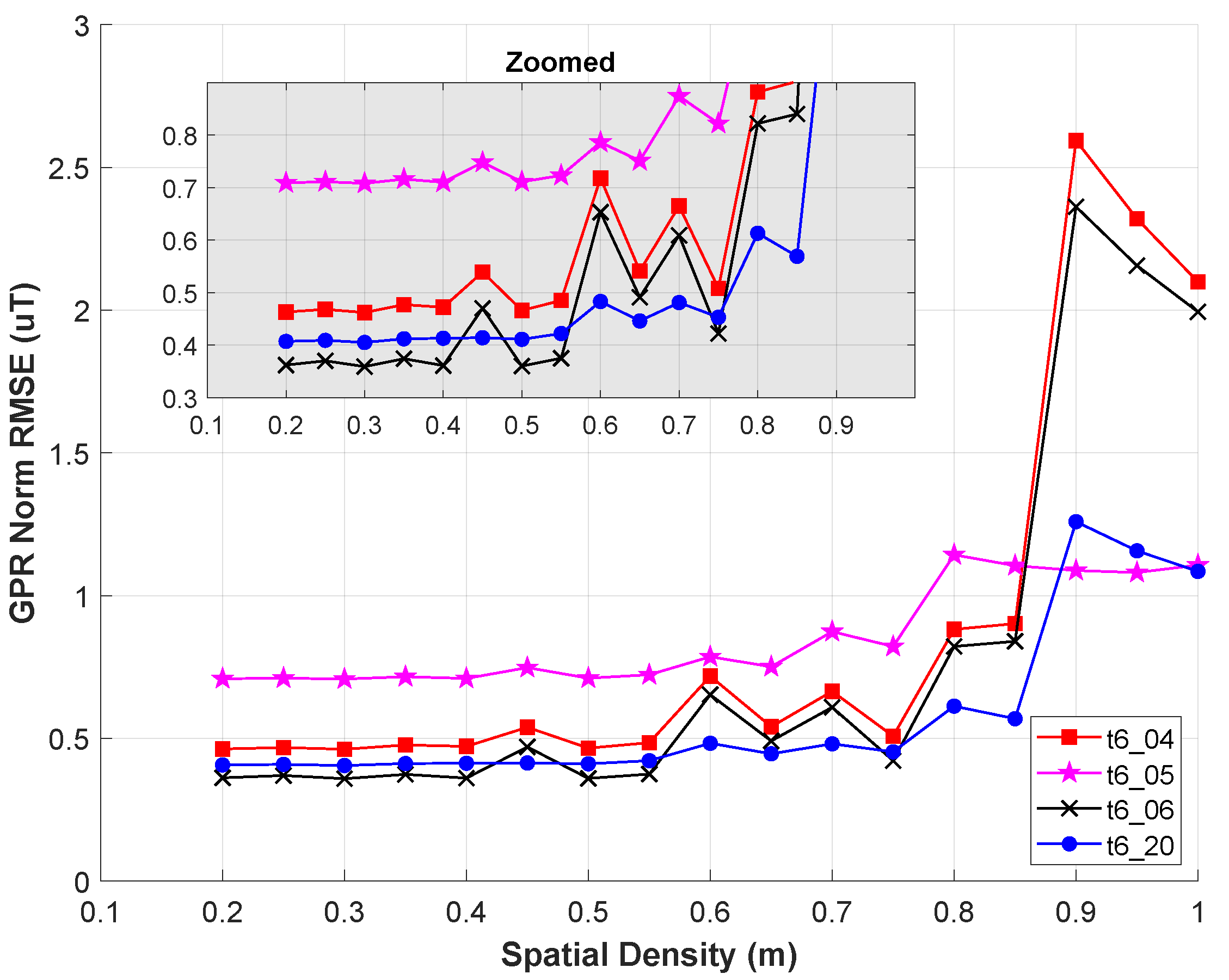
Figure 12 shows norm RMSE of the compromise map (validated on t6_04, t6_05, t6_06, t6_20) as a function of the spatial density term
S. A zoomed-in version of the initial data segment is embedded in the same figure. Here we see that the norm RMSE is nearly constant for values
m with a small spike in norm RMSE at
m. This spike is caused by the naive linear spacing, which occasionally causes poor sampling along altitudes. At
m, we get altitudes of
[−2.25, −1.8, −1.35, −0.9] m. Recall from
Section 5.3.1 that some validation flights have measurements as low as
−0.5m.
Combining these sources of information, we can see that the black-× (t6_06; Scan-
) and red-□ (t6_04; Lower four alts) suffer the worst increases at
m. Since the compromise map’s observations only go as low as
m, both these trajectories have higher GPR RMSE when validated at their
m observations. Meanwhile, blue-∘ (t6_20; Scan-
) shows little change at
m since all its observations are away from the extremes of the working volume. The other transient spikes in
Figure 12 (e.g.,
m) are caused by similar
z-axis sampling from the naive linear spacing. t6_04 and t6_06 continue to be the most sensitive to certain values
S when the map has no observations near
m.
Despite these transient spikes, there are two clear trends we can see in
Figure 12. First, for values of
m (with
m as an exception), the norm RMSE is relatively insensitive to changes in
S. This agrees with ref. [
4] where they show (visually) that their magnetic field map is qualitatively similar for values of
[0.2, 0.4, 0.6] m. In [
4], their analysis led them to use 0.6 m as a standard distance between observations in a subsequent experiment.
For comparison, we briefly summarize the spatial density of observations used by other indoor magnetic field mapping papers. Haverinen et al. map along a single axis (
) and separate observations by 0.04m and 0.1m on a ground robot and chest-mounted pedestrian setup, respectively, [
17]. Additionally, [
16] makes a
map with 0.2 m between each observation, and [
20] make a
map with 0.1 m between observations.
For
,
19] create a constant-altitude planar map using
m separation in
x and
y for their coarse grid and
m for fine grid spacing. This mapping is performed in a 2.1 m × 2.1 m room. Ref. [
10] uses an occupancy grid for their
magnetic field SLAM solution with grid size 0.05 m × 0.05 m. The solution ignores all previous magnetic field measurements further than 0.5m from the vehicle’s current position. Wu et al. made a
map with lanes separated by 0.38 m [
11]. Hanley et al. created
maps at different heights along hallways in three separate buildings [
15]. The authors used a longitudinal separation distance of about 0.4 m (varies per building) and a vertical separation of 0.08 m between their observations.
Finally, Ref. [
13] made a
“map” of a hallway (no explicit interpolation of observations) with (0.33 m × 0.45 m ×
) where the vertical spacing
is not explicitly listed in their work, and [
6] made
maps with
m uniform spacing in all axes. Our previous work used planar lawnmower patterns, as in
Figure 4, but with 0.5 m spacing in the
y axis (instead of the 0.25 m spacing used in this work) [
9]. Furthermore, we used a vertical spacing of 0.75 m in the training sets to investigate the accuracy of
magnetic field maps when interpolating between and extrapolating outside pre-mapped altitudes.
In short, for 1D, 2D, or 3D indoor magnetic field maps, we have not seen any papers using separation distances
S larger than 0.6 m. The exceptions are [
4], where the authors explicitly study a reasonable upper limit on
S, and our work [
9], which studied the interpolative and extrapolative limits of
maps.
We believe the empirical upper bound of m may be driven by proximity to walls and the floor. If this is the case, m might only be the upper bound for indoor regions that are within a couple of meters from some wall or the floor. We acknowledge that this includes nearly every room or hallway in most buildings, but a large, multi-story atrium might be an exception. Portions of such an open, yet indoor, volume may have lower spatial variation and can be accurately mapped with values m.
It is also possible that the floor, and not walls, are the dominating factor for spatial variation in indoor magnetic fields. In [
15], Hanley et al. showed that the magnetic field near the floor (within 0.5 m from the ground) of three university buildings is most distinct from the field at other altitudes up to 2 m. This might explain why the other works in the spatial density summary, which mostly use ground robots and pedestrians that remain “near” the floor, have
m.
The second conclusion, the complement of the first, is that values of m start to show steady increases in norm RMSE. It is not clear what trends hold for m, but such separation distances are somewhat degenerate given the size of our working volume. Furthermore, it is unlikely for the norm RMSE values to return to their m for values of m.
This analysis led us to use
m for the
x–
y compromise map separation distance. We chose
m for
z because we found (empirically) that the GPR’s performance is most sensitive to omissions in observed altitudes. Recent works on indoor magnetic field mapping have shown similar trends: that indoor magnetic fields change noticeably as a function of altitude [
9,
15]. For our analysis, similarly for [
9,
15], it is not clear how much this altitude-based sensitivity is driven by the fact that all flights are comprised of many single-altitude slices.
This section showed that magnetic field map accuracy is similar if observations are within m in all directions. We have not seen any other papers on indoor magnetic field mapping using separation distances larger than m. This upper bound helps to choose locations for a compromise map and informs the design of trajectories when sampling the magnetic field.
5.6. Consistency Check
Previous sections showed how to reduce (
Section 5.1 and
Section 5.2.5), identify (
Section 5.2.2) and incorporate (
Section 5.3) otherwise unmodeled noise from the UAV. However, there may still be unmodeled errors in a magnetic field map from the movement of furniture or if different platforms with their own unique noise sources are used (e.g., a map trained on UAV data but used for pedestrian localization). This section introduces a method to assess the credibility of predictions from a magnetic field map. The goal is to indicate when predictions from a magnetic field map are reliable and when it may be advantageous to leverage a different sensing modality.
Here, we introduce the concept of “consistency” between a Gaussian process map and a validation flight. Given a magnetic field map, we say that a validation flight is consistent with the map if all m GPRs, respectively, capture 96% of their error within two standard deviations (2) of their uncertainty.
The 96% threshold is inspired by the expected number of points that fall within two standard deviations of a univariate normal (Gaussian) distribution. Additionally, the 96% threshold worked well for our test platform, our choice of GPR kernel (squared exponential), the way we optimize hyperparameters (minimization of log marginal likelihood;
Section 3.1), and our target application of position localization. Although these kernel and optimization methods are common, we have not investigated how different kernels or hyperparameters influence our definition of consistency.
To demonstrate, we create a compromise map of 2 Hz-downsampled observations from the following seven flight tests: t6_0, t6_1, t6_3, t6_4, t6_5, t6_6, t6_16. We validate this compromise map on 10 Hz samples from four flight tests (t6_09, t6_11, t6_15, t6_18) to illustrate how we use the consistency metric. Here, we train and validate on different t6_XX tests, comparing them to the previous sections. We frequently use this particular compromise map for studying position localization accuracy. The selected validation flights serve as examples that aid in understanding the consistency check.
Figure 13 shows the map’s performance on the four selected validation flights. We start with a case that easily passes the consistency test (
Figure 13a). Test t6_11 fails the consistency test since the
does not capture enough of its error within its
uncertainty. Please note that even though
and
have an accurate understanding of their error, the poor performance of the
alone makes test t6_11 inconsistent with this
map. If the
estimates are not needed (e.g., localization using magnetic field heading [
16]), then the inaccuracies of
may be irrelevant, and the map could still be useful.
Figure 13c shows an example of the flight-by-flight variation changing partway through a validation flight. In this case, the first 1220 validation points easily pass the consistency metric for all three GPRs. From 1220 to 1335, things worsen, and
barely fails the consistency test. After data point 1335, all three GPRs fail the consistency check.
Since most of test t6_15 (up to point 1220) is consistent with the compromise map, computing the 2
percentage across the entire validation set gives (97%, 95%, 95%) for each GPR, respectively. Working with these numbers alone (without having
Figure 13c for context), it is tempting to say all of t6_15 is consistent with the map (although barely). However, since flight-by-flight variations can change bias values partway through a flight test, it may be necessary to apply the consistency check to portions of a flight.
Finally, validating on t6_18 gives
Figure 13d where the first 1242 validation points undoubtedly pass the consistency test but
fails on the remaining points. Please note that in
Figure 13d,
also changes its behavior near index 1380, but we focus on
since it fails first.
Ninety-six percent should be taken as a “rule of thumb” rather than a magic threshold where something fundamentally changes. It is important to consider how the map will be used when deciding whether a validation test should be rejected based on the consistency check alone. Here, for t6_18 in
Figure 13d, we also include the RMSE values (in blue) for all points before and after 1242 to illustrate the accuracy of the compromise map before and after the mid-flight bias shift.
For the analysis in ref. [
9], though we did not realize it at the time, these flight-by-flight variations were still present. Yet, we used magnetic field maps to improve attitude estimates on a UAV. This may be due to the nature of attitude estimation, which compares the angle of a measured vector against its corresponding reference vector. In [
9], the flight-by-flight variations did not significantly change the angle of the magnetic field reference vectors, so they were less of an issue.
Our preliminary results on magnetic field position localization show that the errors in t6_15 (
Figure 13c) and t6_18 (
Figure 13d) are enough to confuse a particle filter and cause noticeably larger estimation errors. The use of GPR-based magnetic field maps for position localization (via a particle filter) drove the methods throughout this paper and influenced our consistency check threshold. However, if the intended application is more robust to “small” inaccuracies of the map, then a more lenient threshold may work.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













