
Sensorless Model Predictive Control of Single-Phase Inverter for UPS Applications via Accurate Load Current Estimation
Abstract
:
1. Introduction
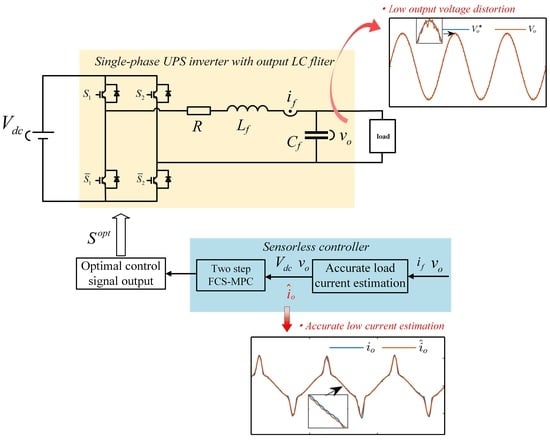
2. System Description
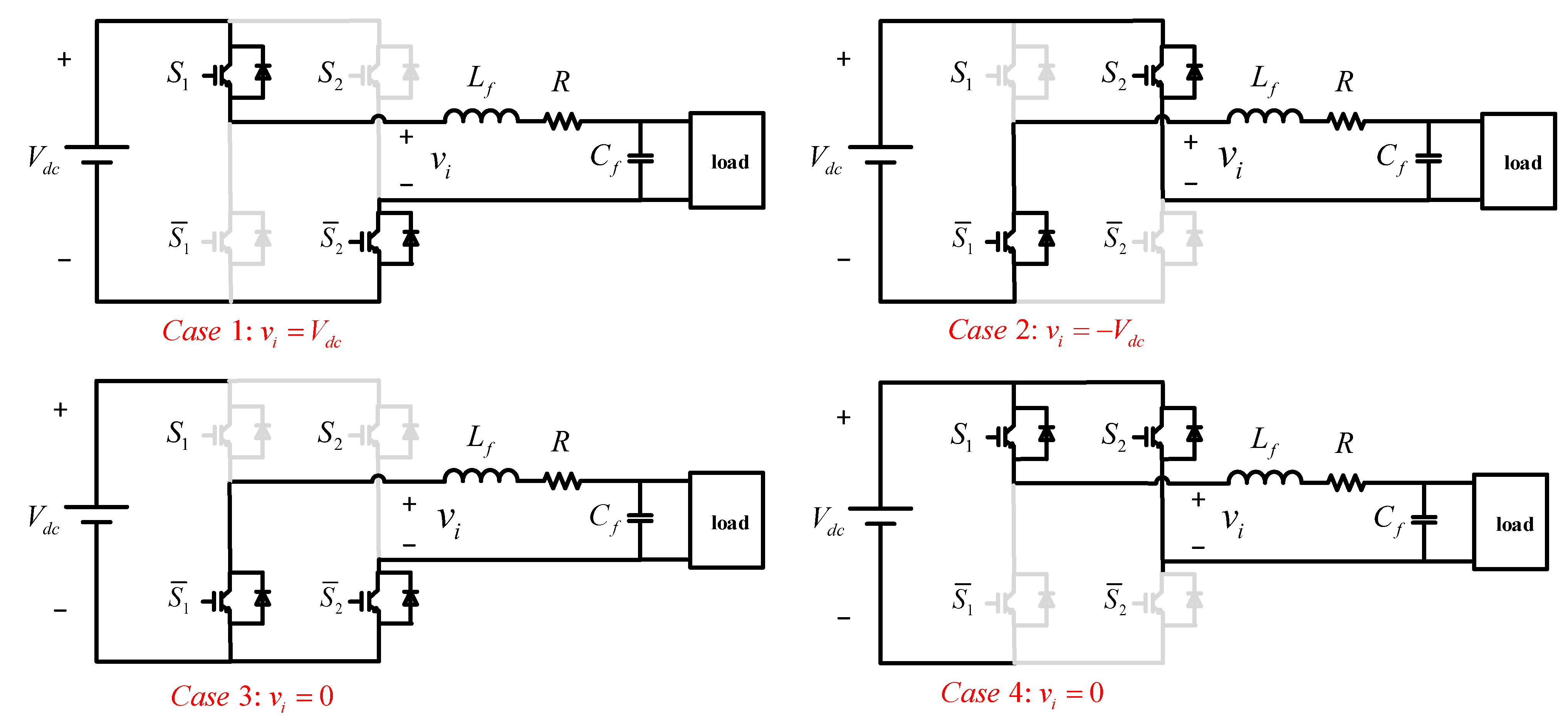
2.1. System Model
2.2. LC Filter Model
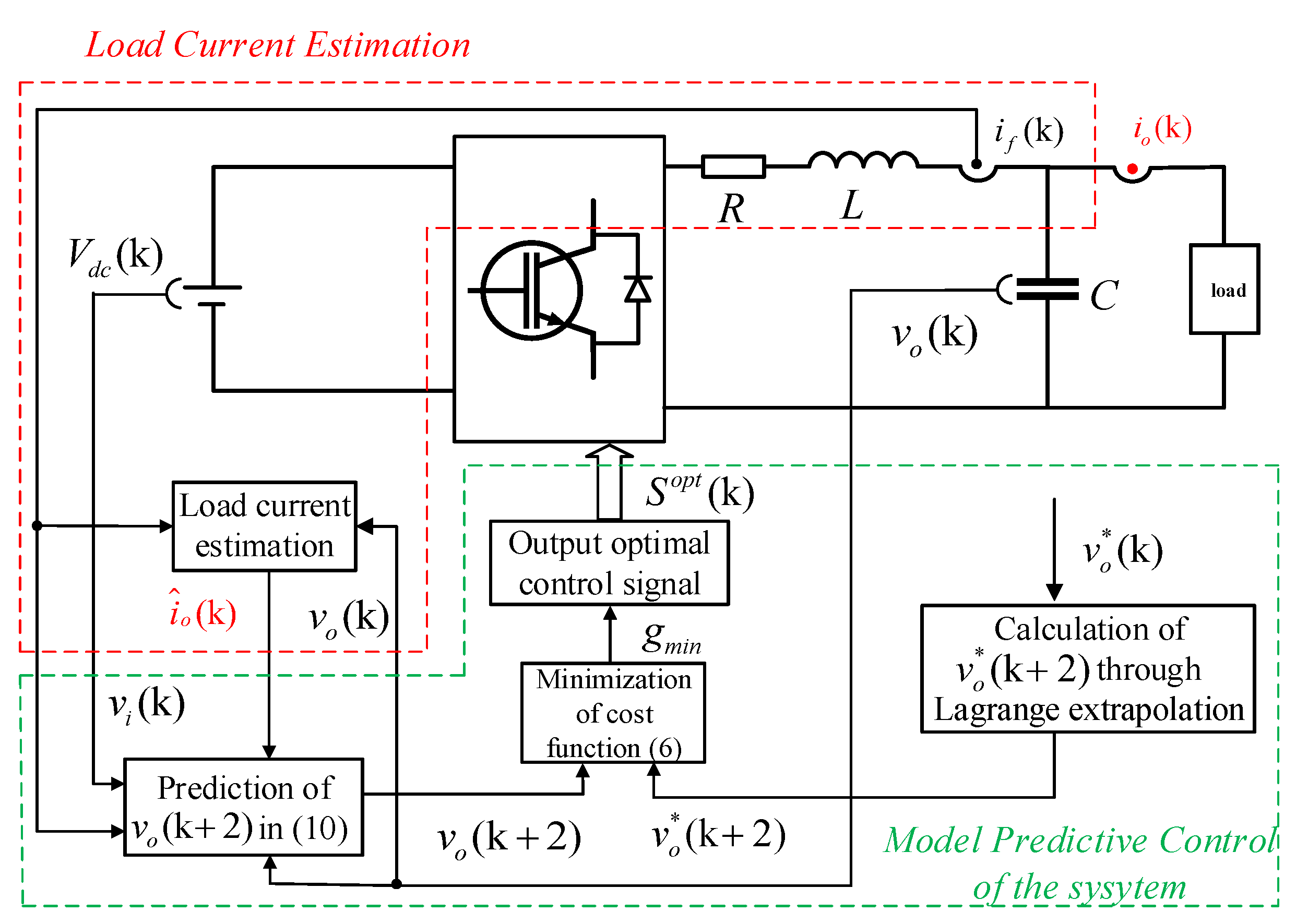
3. Two-Step Model Predictive Control
4. Load Current Estimation
4.1. Observer Design
4.2. Proof of Observer Effectiveness
5. Simulation and Experimental Results
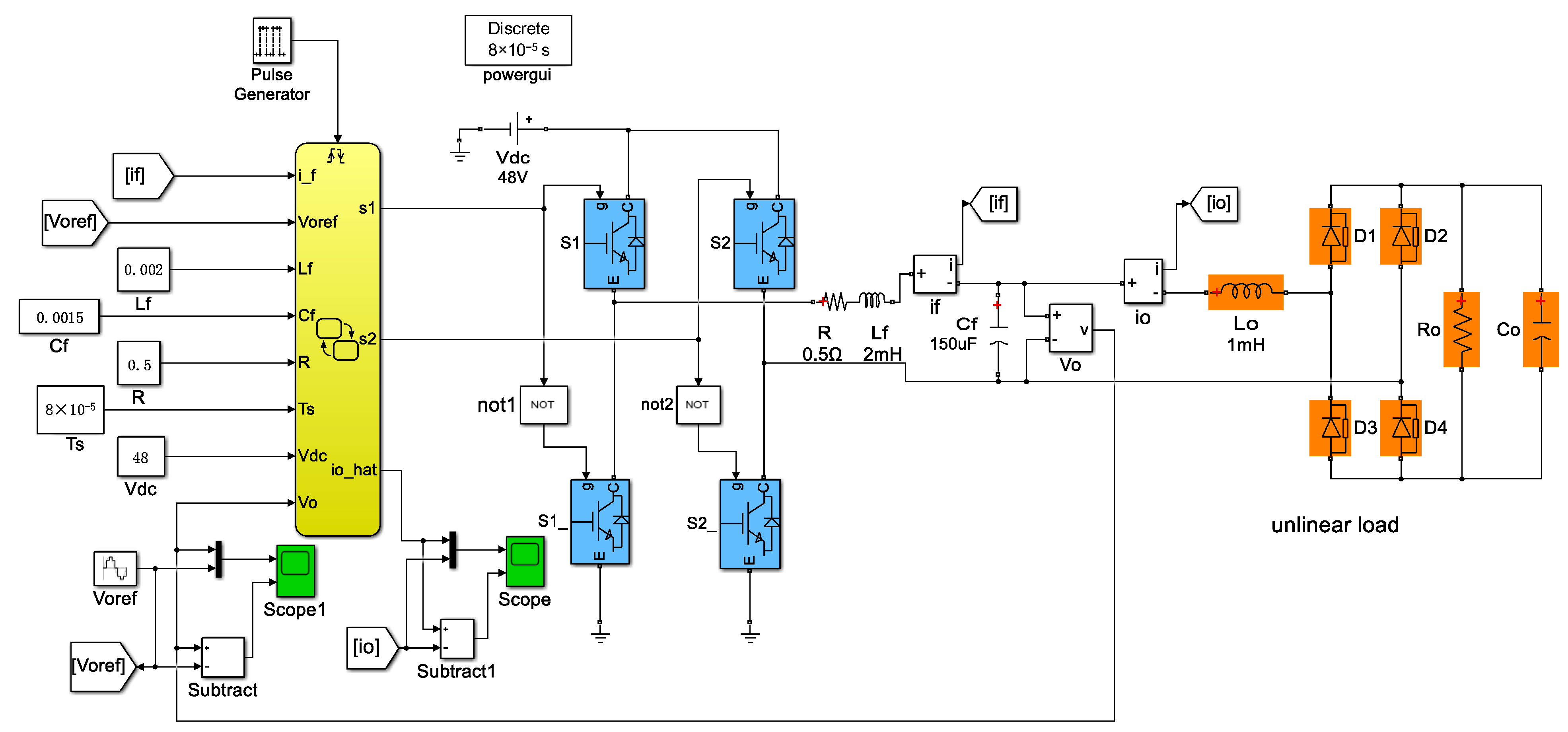
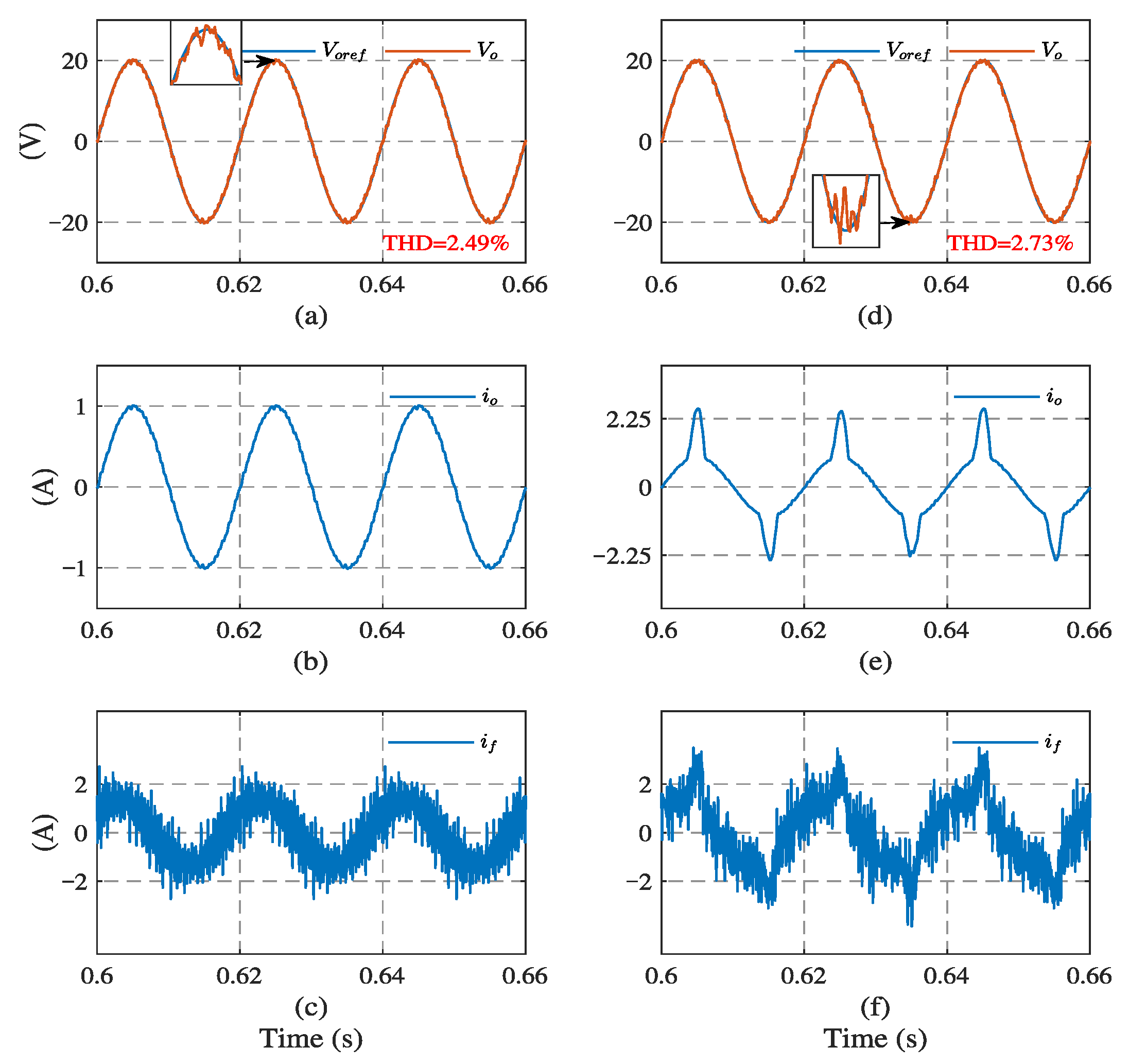
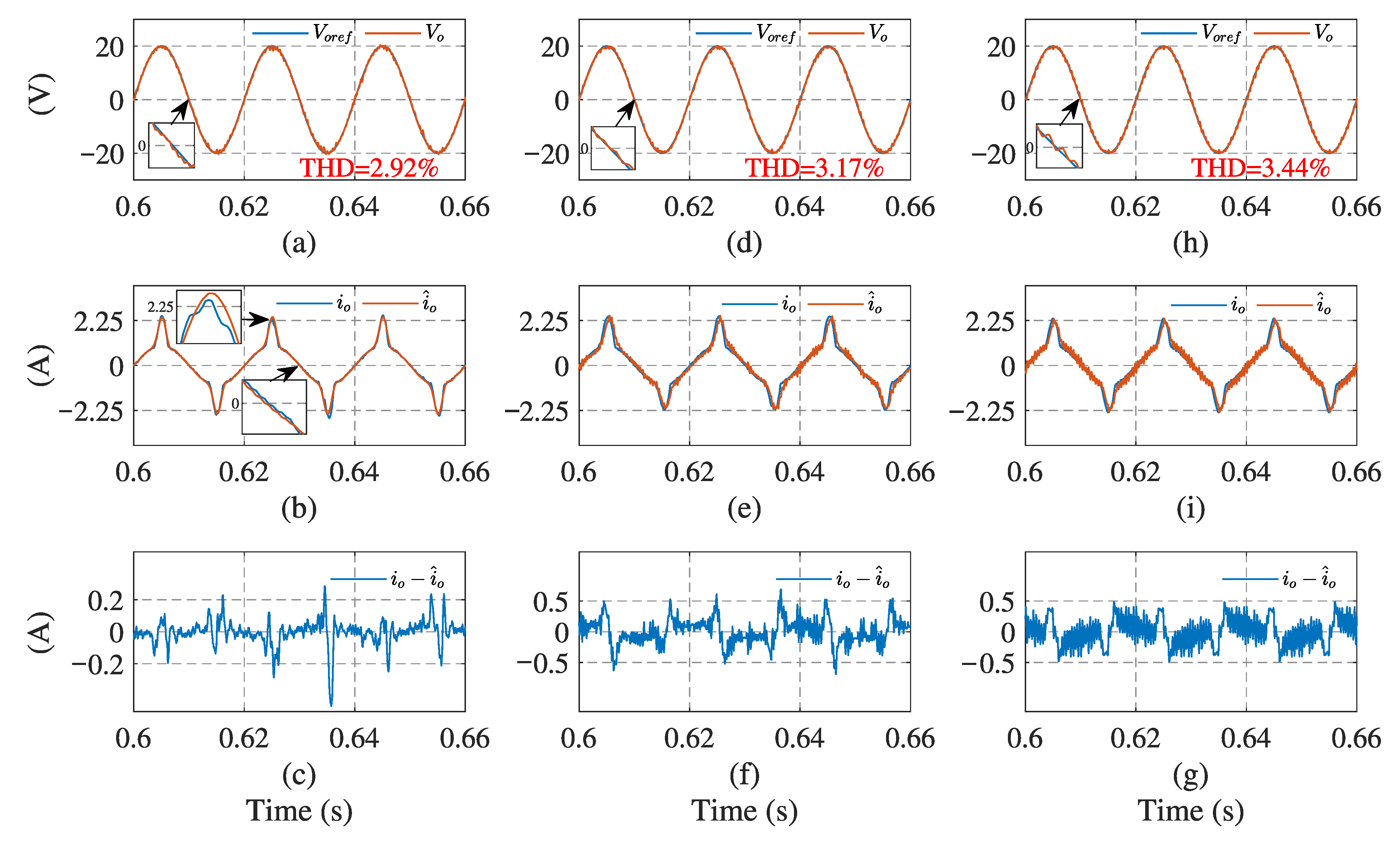
5.1. Simulation Results
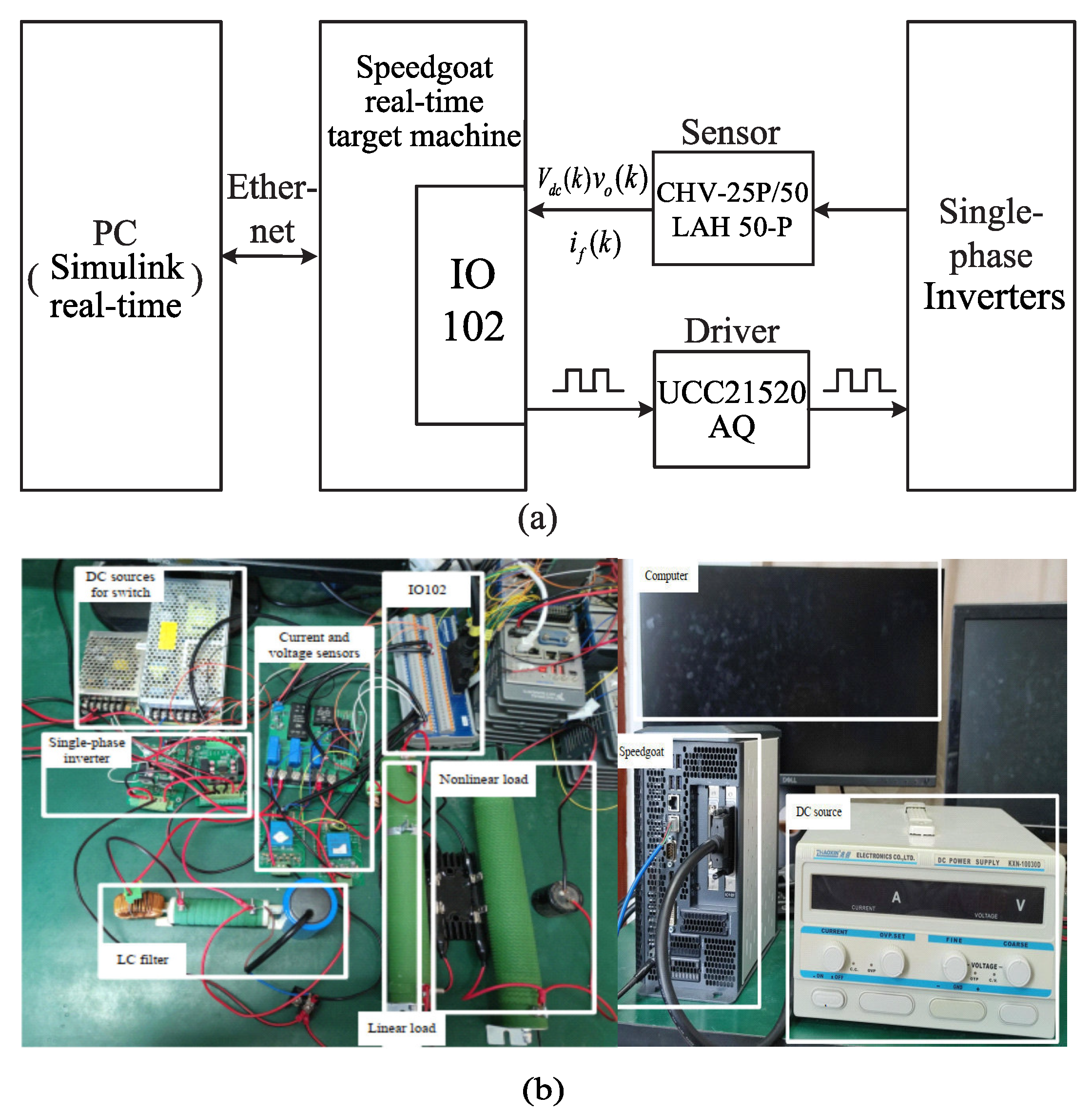
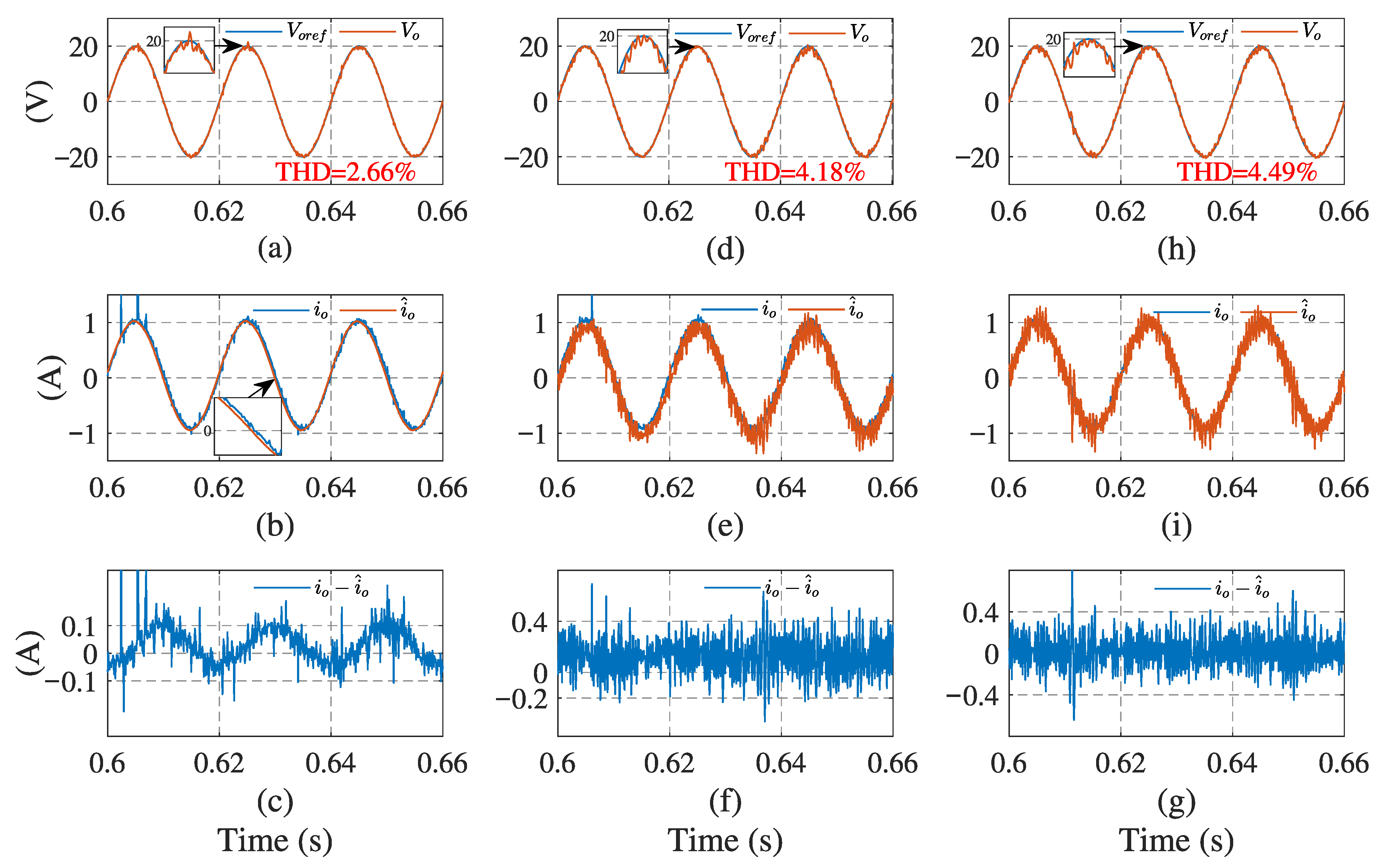
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Input DC voltage | |
| Output voltage of H-bridge | |
| Inverter output voltage | |
| Inverter output voltage reference | |
| Filter input current | |
| Load current | |
| Estimation load current | |
| g | Cost function |
| Filter capacitor | |
| Filter inductance | |
| R | System resistance |
| Linear load resistance | |
| Load inductance | |
| Load resistance | |
| Load capacitance | |
| Sampling interval | |
| DC component of load current | |
| Harmonic coefficient of load current | |
| Feedback coefficient |
References
- Aamir, J.; Pontt, J.A.; Silva, C.A.; Correa, P.; Corts, P.; Ammann, U. Predictive Current Control of a Voltage Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar]
- Bernacki, K.; Rymarski, Z. A Contemporary Design Process for Single-Phase Voltage Source Inverter Control Systems. Sensors 2022, 22, 7211. [Google Scholar] [CrossRef] [PubMed]
- Nasiri, A. Digital control of three-phase series-parallel uninterruptible power supply systems. IEEE Trans. Power Electron. 2007, 22, 1116–1127. [Google Scholar] [CrossRef]
- Chen, Y.H.; Cheng, P.T. An inrush current mitigation technique for the line-interactive uninterruptible power supply systems. IEEE Trans. Ind. Appl. 2010, 22, 1498–1508. [Google Scholar] [CrossRef]
- Low, K.S.; Cao, R. Model predictive control of parallel-connected inverters for uninterruptible power supplies. IEEE Trans. Ind. Electron. 2008, 55, 2884–2893. [Google Scholar]
- Undeland, W.; Robbins, P.; Mohan, N. Power Electronics: Converters, Applications, and Design; Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F.; Irwin, J.D. Control in Power Electronics: Selected Problems; Academic Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Castilla, M.; Miret, J.; Matas, J.; Vicuna, L.G.D.; Guerrero, J.M. Control Design Guidelines for Single-Phase Grid-Connected Photovoltaic Inverters With Damped Resonant Harmonic Compensators. IEEE Trans. Ind. Electron. 2009, 56, 4492–4501. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.M.; Qian, Z.M. An Improved Repetitive Control Scheme for Grid-Connected Inverter With Frequency-Adaptive Capability. IEEE Trans. Ind. Electron. 2012, 60, 814–823. [Google Scholar] [CrossRef]
- Trinh, Q.N.; Lee, H.H. An Enhanced Grid Current Compensator for Grid-Connected Distributed Generation Under Nonlinear Loads and Grid Voltage Distortions. IEEE Trans. Ind. Electron. 2014, 61, 6528–6537. [Google Scholar] [CrossRef]
- Zheng, L.J.; Jiang, F.Y.; Song, J.C.; Gao, Y.G.; Tian, M.Q. A Discrete-Time Repetitive Sliding Mode Control for Voltage Source Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 1553–1566. [Google Scholar] [CrossRef]
- Hu, Y.H.; Deng, Y.; Liu, Q.W.; He, X.N. Asymmetry Three-Level Gird-Connected Current Hysteresis Control With Varying Bus Voltage and Virtual Oversample Method. IEEE Trans. Power Electron. 2013, 29, 3214–3222. [Google Scholar] [CrossRef]
- Rodriguez, J. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Electron. 2012, 9, 1003–1016. [Google Scholar] [CrossRef]
- Cortes, P.; Kazmierkowski, P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Simple control scheme for single-phase uninterruptible power supply inverters with Kalman filter-based estimation of the output voltage. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Guo, L.; Jin, N.; Gan, C.; Xu, L.; Wang, Q. An Improved Model Predictive Control Strategy to Reduce Common-Mode Voltage for Two-Level Voltage Source Inverters Considering Dead-Time Effects. IEEE Trans. Ind. Electron. 2019, 66, 3561–3572. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T. Guidelines for the Design of Finite Control Set Model Predictive Controllers. IEEE Trans. Power Electron. 2019, 35, 7434–7450. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of Finite-Control-Set Model Predictive Current Control With Model Parameter Mismatch in a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Diaz-Bustos, M.; Baier, C.R.; Torres, M.A.; Melin, P.E.; Acuna, P. Application of a Control Scheme Based on Predictive and Linear Strategy for Improved Transient State and Steady-State Performance in a Single-Phase Quasi-Z-Source Inverter. Sensors 2022, 22, 2458. [Google Scholar] [CrossRef]
- Cortes, P.; Ortiz, G.; Yuz, J.I.; Rodriguez, J.; Vazquez, S.; Franquelo, L. Model Predictive Control of an Inverter With Output LC Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Nauman, M.; Hasan, A. Efficient implicit model-predictive control of a three-phase inverter with an output LC filter. IEEE Trans. Power Electron. 2016, 31, 6075–6078. [Google Scholar] [CrossRef]
- Yaramasu, V.; Rivera, M.; Narimani, M.; Wu, B.; Rodriguez, J. Model predictive approach for a simple and effective load voltage control of four-leg inverter with an output LC filter. IEEE Trans. Ind. Electron. 2014, 61, 5259–5270. [Google Scholar] [CrossRef]
- Vazquez, S.; Marquez, A.; Leon, J.I.; Franquelo, L.G.; Geyer, T. FCS-MPC and observer design for a VSI with output LC filter and sinusoidal output currents. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 677–682. [Google Scholar]
- Mohamed, I.S.; Rovetta, S.; Do, T.D.; Dragicević, T.; Diab, A.A.Z. A Neural-Network-Based Model Predictive Control of Three-Phase Inverter With an Output LC Filter. IEEE Access 2019, 7, 124737–124749. [Google Scholar] [CrossRef]
- Mohamed, I.S.; Zaid, S.A.; Abu-Elyazeed, M.F.; Elsayed, H.M. Improved model predictive control for three-phase inverter with output LC filter. Int. J. Model. Identif. Control 2015, 23, 371–379. [Google Scholar] [CrossRef]
- Dragičević, T. Model predictive control of power converters for robust and fast operation of AC microgrids. IEEE Trans. Power Electron. 2017, 33, 6304–6317. [Google Scholar] [CrossRef]
- Talbi, B.; Krim, F.; Laib, A. Model predictive voltage control of a single-phase inverter with output LC filter for stand-alone renewable energy system. Electr. Eng. 2020, 102, 1073–1082. [Google Scholar] [CrossRef]
- Zheng, C.M.; Dragicevic, T.; Blaabjerg, F. Current-Sensorless Finite-Set Model Predictive Control for LC-Filtered Voltage Source Inverters. IEEE Trans. Power Electron. 2019, 35, 1086–1095. [Google Scholar] [CrossRef]
- Vas, P. Sensorless Vector and Direct Torque Control; Oxford University Press: Oxford, UK, 1998; Volume 52, pp. 3451–3460. [Google Scholar]
- Razi, R.; Monfared, M. Simple control scheme for single-phase uninterruptible power supply inverters with Kalman filter-based estimation of the output voltage. IET Power Electron. 2015, 8, 1817–1824. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Sun, Y.; Li, X.; Xie, S.; Lin, J.; Su, M. Observer-Based Adaptive Control for Single-Phase UPS Inverter Under Nonlinear Load. IEEE Trans. Transp. Electrif. 2022, 8, 2785–2796. [Google Scholar] [CrossRef]
- Laamiri, S.; Ghanes, M.; Santomenna, G. Observer based direct control strategy for a multi-level three phase flying-capacitor inverter. Control Eng. Pract. 2019, 86, 155–165. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J.; Abu-Rub, H. Assessing Finite-Control-Set Model Predictive Control: A Comparison with a Linear Current Controller in Two-Level Voltage Source Inverters. IEEE Ind. Electron. Mag. 2014, 8, 44–52. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Liang, J.; Gao, J.; Walker, P.D.; Zhang, N. Sliding-Mode Observer Based Voltage-Sensorless Model Predictive Power Control of PWM Rectifier Under Unbalanced Grid Conditions. IEEE Trans. Ind. Electron. 2018, 65, 5550–5560. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.S.; Konishi, Y.; Yang, Z.Z.; Hsieh, M.J. Observer-Based Capacitor Current Sensorless Control Applied to a Single-Phase Inverter System With Seamless Transfer. IEEE Trans. Power Electron. 2018, 34, 2819–2828. [Google Scholar] [CrossRef]
- Mohamed, I.S.; Zaid, S.A.; Abu-Elyazeed, M.F.; Elsayed, H.M. Classical Methods and Model Predictive Control of Three-Phase Inverter With Output LC Filter for UPS Applications. In Proceedings of the International Conference on Control, Decision and Information Technologies (CoDIT), Hammamet, Tunisia, 6–8 May 2013; pp. 483–488. [Google Scholar]
- Karanayil, B.; Rahman, M.F.; Grantham, C. An implementation of a programmable cascaded low-pass filter for a rotor flux synthesizer for an induction motor drive. IEEE Trans. Power Electron. 2004, 2, 257–263. [Google Scholar] [CrossRef]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Input DC voltage () | 48 V |
| Filter inductance () | 2 mH |
| Filter capacitance () | 150 F |
| System resistance (R) | 0.5 |
| Linear load resistance () | 20 |
| Load inductance () | 1 mH |
| Load resistance () | 80 |
| Load capacitance () | 470 F |
| Sampling interval () | 80 s |
| Load Type | With Load Current Sensor | Proposed Observer | Kalman Filter | Low-Pass Filter | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE (A) | THD (%) | RMSE (A) | THD (%) | RMSE (A) | THD (%) | RMSE (A) | THD (%) | |
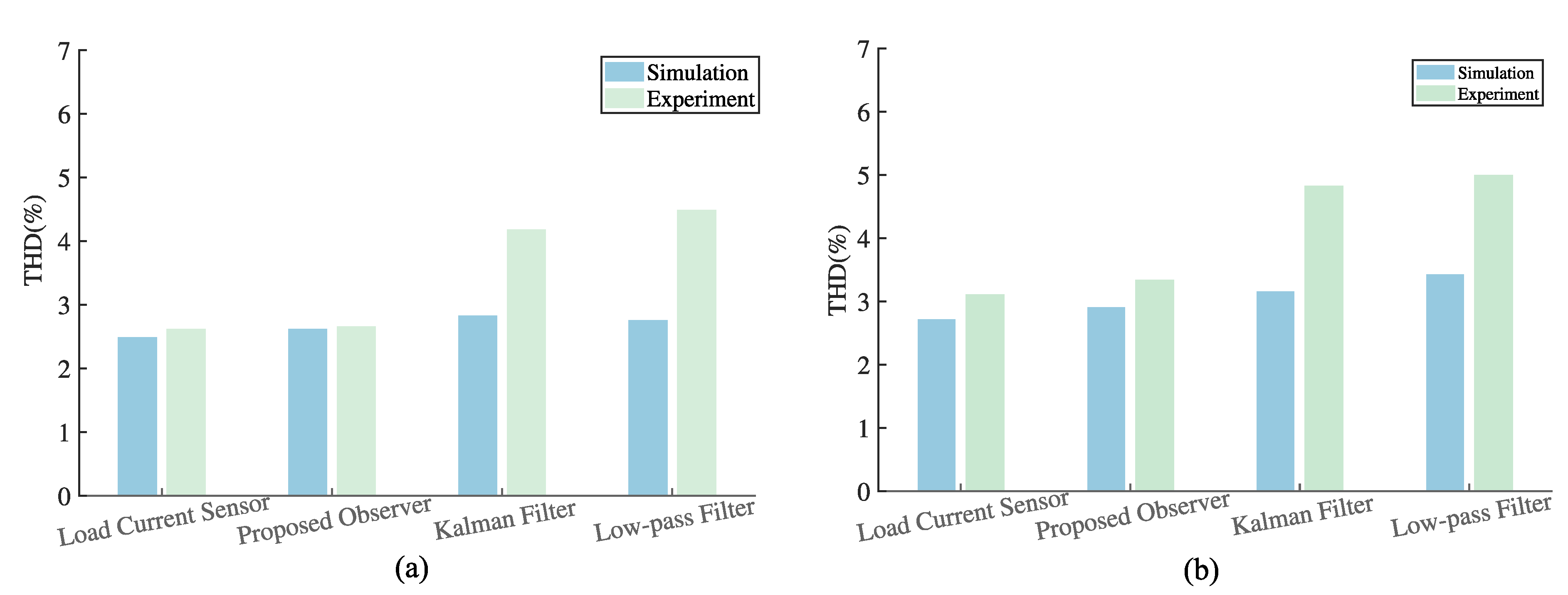
| Linear Load | - | 2.49 | 0.0531 | 2.62 | 0.1817 | 2.83 | 0.1341 | 2.76 |
| Nonlinear Load | - | 2.73 | 0.0798 | 2.92 | 0.2156 | 3.17 | 0.2222 | 3.44 |
| Load Type | With Load Current Sensor | Proposed Observer | Kalman Filter | Low-Pass Filter | ||||
|---|---|---|---|---|---|---|---|---|
| RMSE (A) | THD (%) | RMSE (A) | THD (%) | RMSE (A) | THD (%) | RMSE (A) | THD (%) | |
| Linear Load | - | 2.62 | 0.0859 | 2.66 | 0.2027 | 4.18 | 0.1809 | 4.49 |
| Nonlinear Load | - | 3.11 | 0.1506 | 3.34 | 0.2704 | 4.83 | 0.2533 | 5.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Tong, X.; Wang, Z.; Xu, M.; Zhu, J. Sensorless Model Predictive Control of Single-Phase Inverter for UPS Applications via Accurate Load Current Estimation. Sensors 2023, 23, 3742. https://doi.org/10.3390/s23073742
Li P, Tong X, Wang Z, Xu M, Zhu J. Sensorless Model Predictive Control of Single-Phase Inverter for UPS Applications via Accurate Load Current Estimation. Sensors. 2023; 23(7):3742. https://doi.org/10.3390/s23073742
Chicago/Turabian StyleLi, Po, Xiaoshan Tong, Zhoujing Wang, Maoguang Xu, and Jianfeng Zhu. 2023. "Sensorless Model Predictive Control of Single-Phase Inverter for UPS Applications via Accurate Load Current Estimation" Sensors 23, no. 7: 3742. https://doi.org/10.3390/s23073742