
Grand Theft Auto-Based Cycling Simulator for Cognitive Enhancement Technologies in Dangerous Traffic Situations

Abstract
:1. Introduction
- GTA V is an off-the-shelf game bringing realistic motorists and cyclists as well as road environments;
- GTA V is well suited for user experience research because it provides a repeatable environment;
- GTA V comes with a physics engine that includes realistic weather conditions, trajectories of road users even in crash situations, and sound directions;
- Using a well-known game, such as GTA V, as a simulator allows the user to express his or her needs better due to the known environment.
2. Related Work
2.1. Cognitive Enhancement for Increased Safety
2.2. Computer Games as Simulators in Research
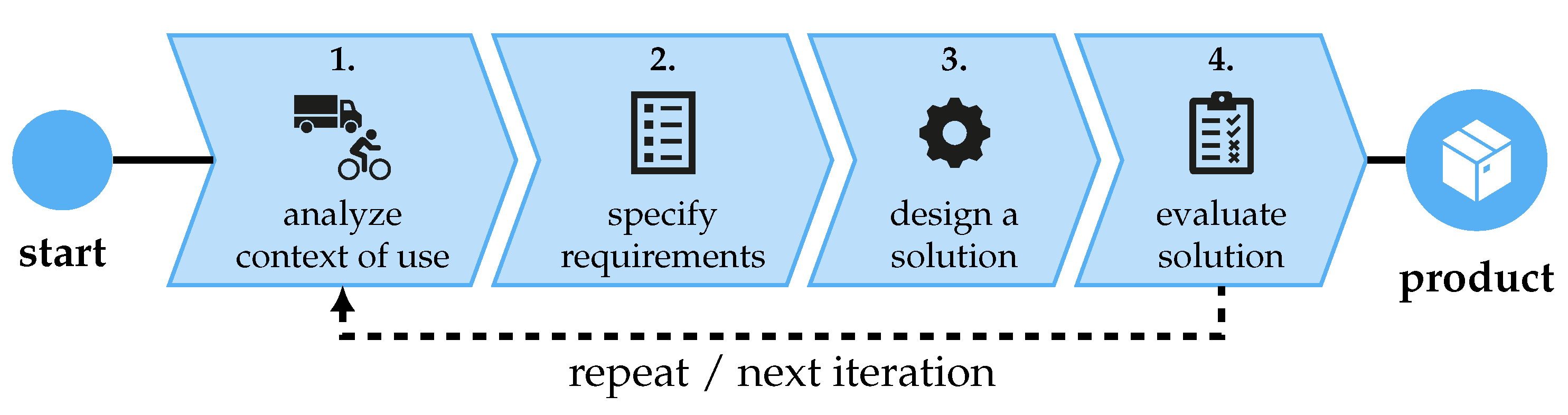
3. Requirements Analysis of the Simulator
3.1. Simulator Objectives
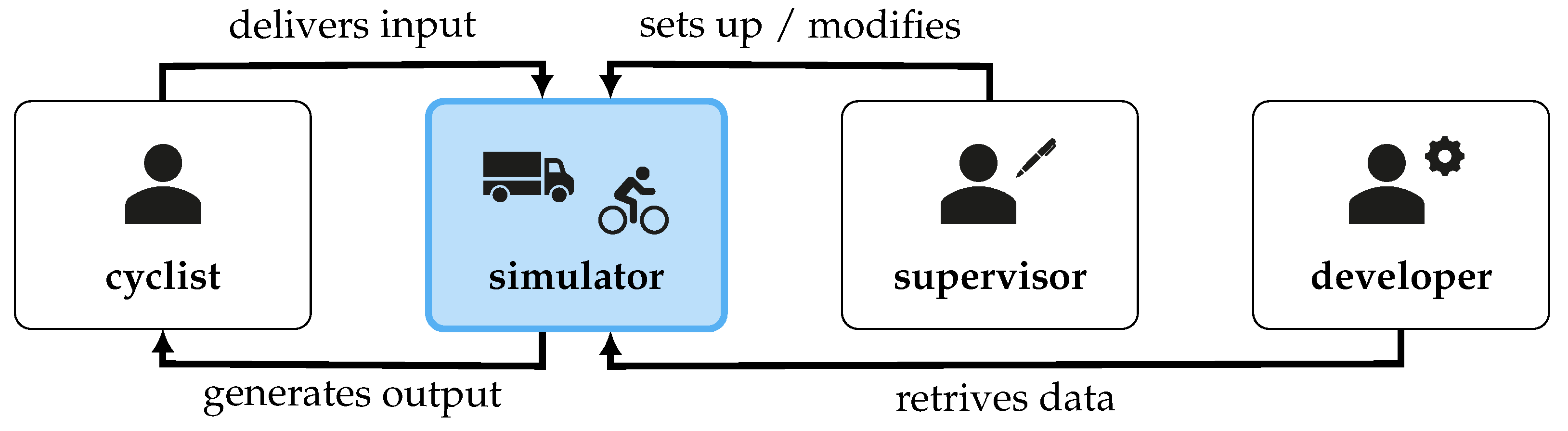
3.2. User Groups
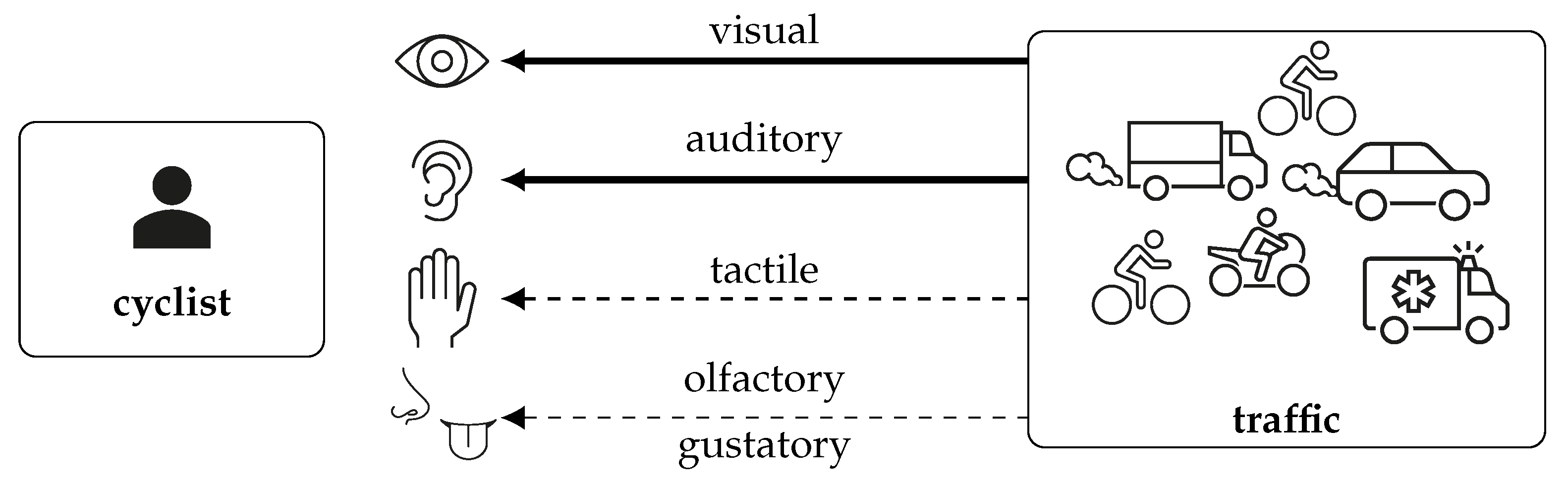
3.3. Simulation Context
3.4. User Requirements
4. Concept Design
4.1. System Choice
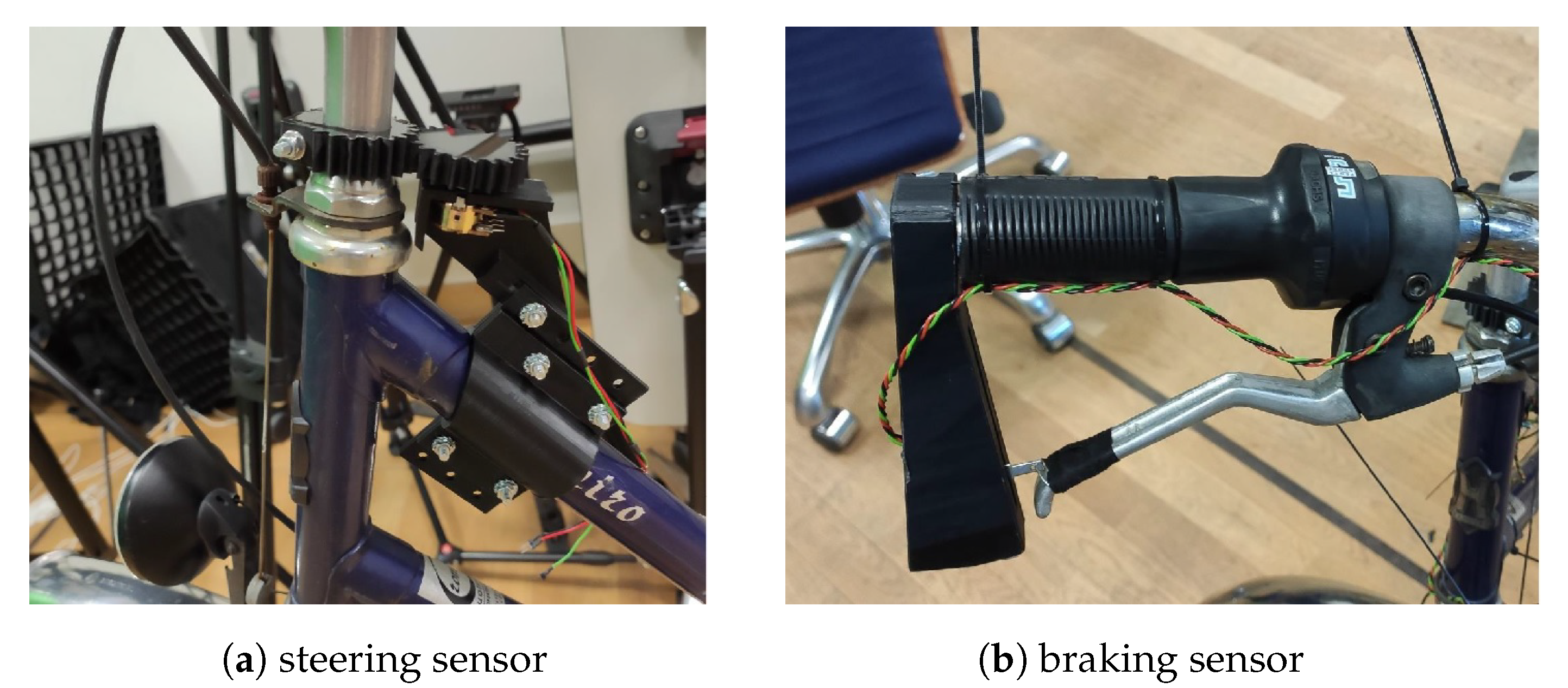
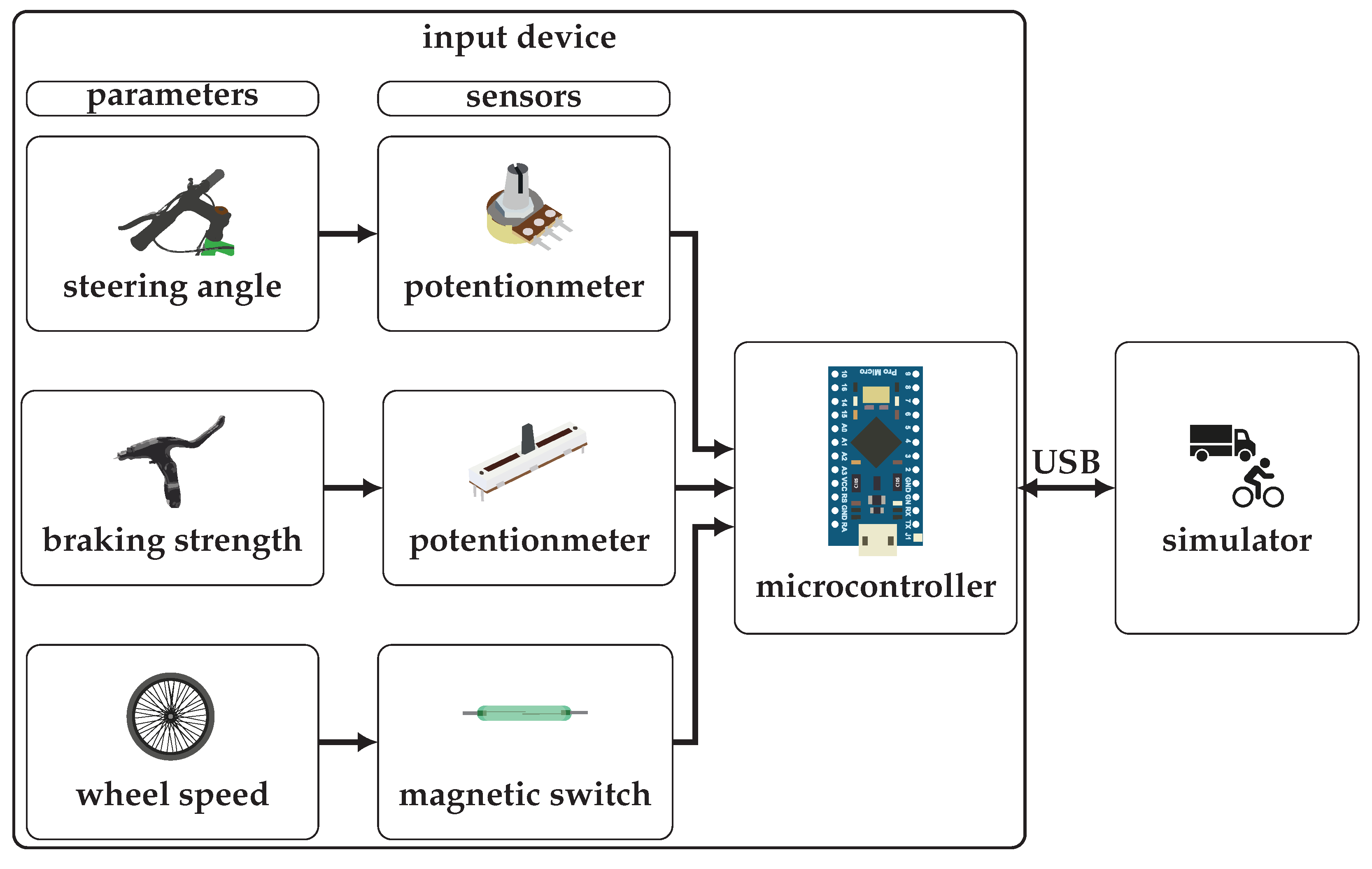
4.2. Input Device
5. Implementation
- GTA V already has an immersive traffic system with various road users and vehicles. Thus, no implementation work of a realistic traffic simulation is necessary.
- GTA V also provides the environment with realistic 3D assets, textures, animations, and weather effects, which makes the simulator realistic.
- GTA V comes with a built-in physics system that handles collisions of vehicles realistically enough not to require additional implementation work, again lowering the cost and creation time of the simulator.
- GTA V has an active modding community, which has identified different ways to change the game’s logic, which means that there might already be a mod that can help run an experiment or serve as inspiration for the experiment code, simplifying the implementation work.
- GTA V provides various input devices to be connected to the game. They all act as a controller with the original controls, allowing for more realistic input devices, such as modified bicycle handlebars.
- GTA V is a popular game, and while the city it takes place in is fictional, it is primarily inspired by American cities, invoking a sense of familiarity in players.
- GTA V does not consider the legal road rules, which differ in many countries.
- GTA V has, relative to real life, limited interactions between traffic vehicles, pedestrians, and the environment.
- GTA V does not provide fine-grained operation of the bike. In contrast to the car simulation, the bike simulation is very simplified.
- GTA V’s storylines can be disturbing because some parts cannot be skipped by modding the game.
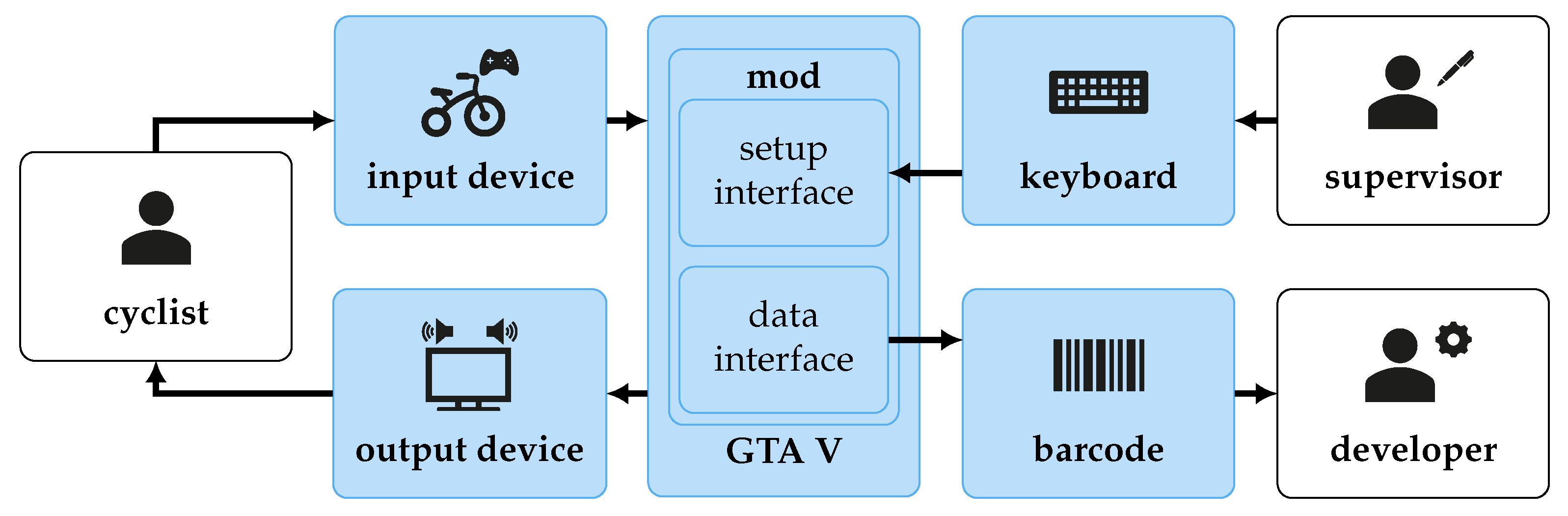
5.1. Simulator
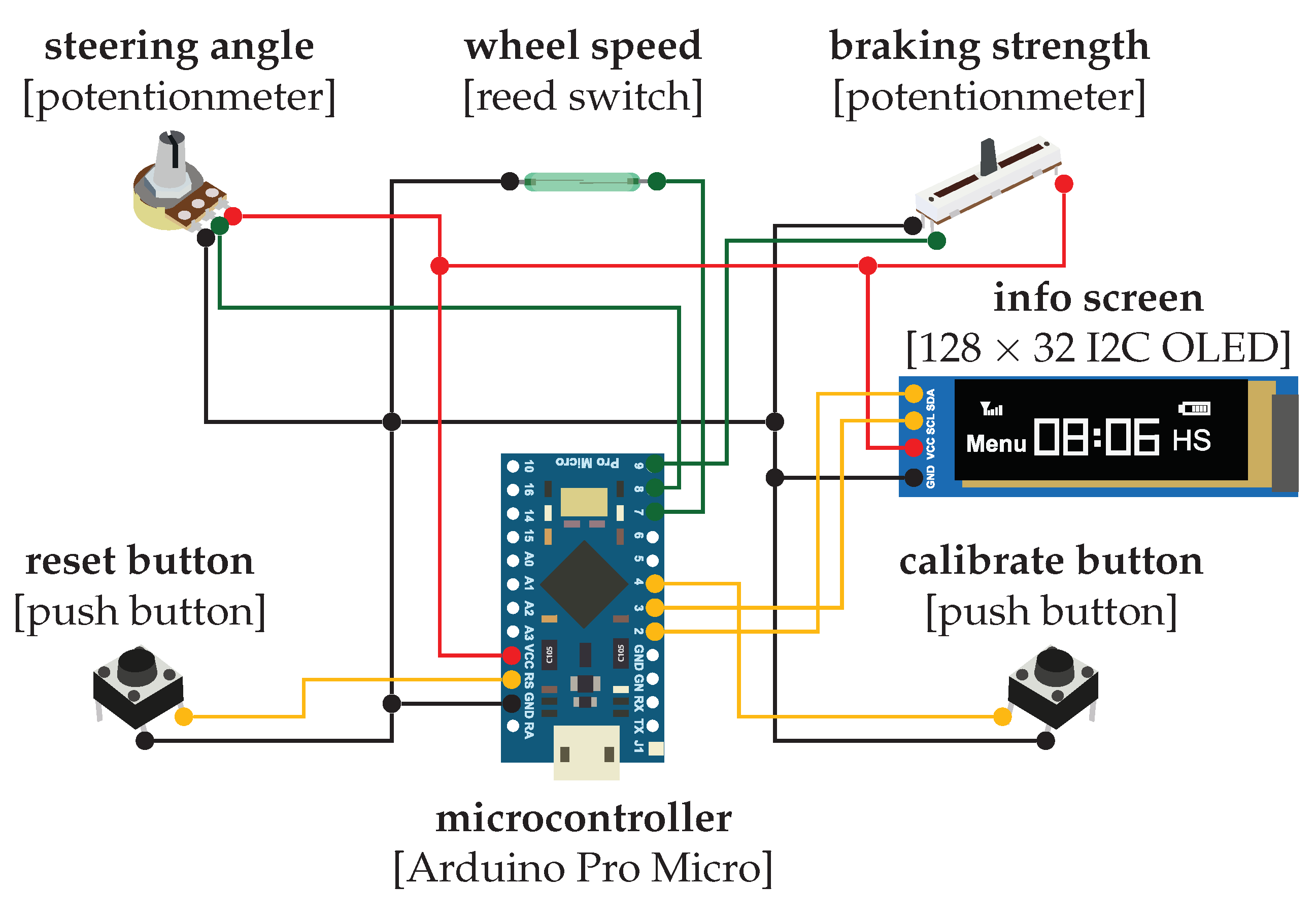
5.2. Input Device
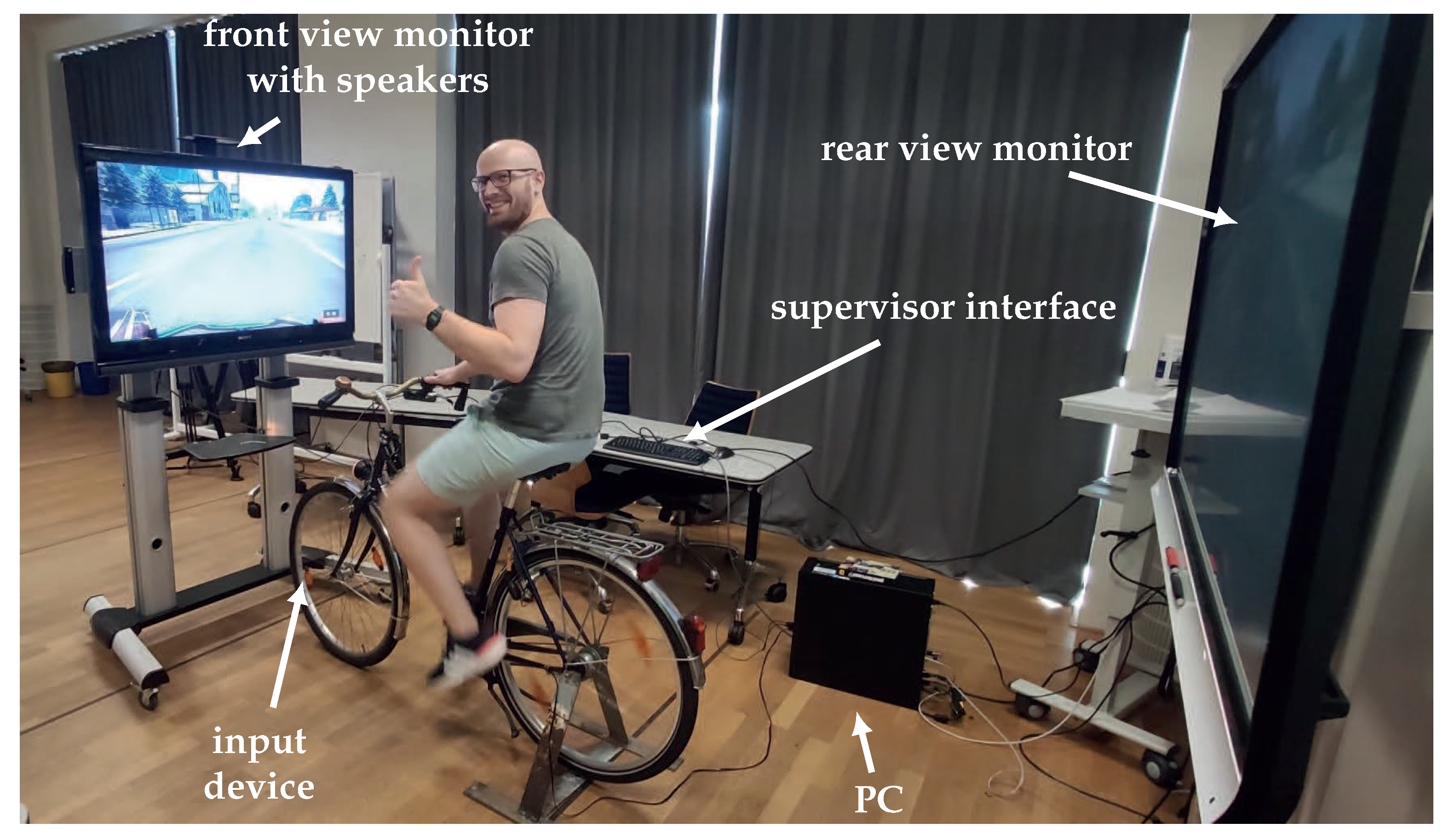
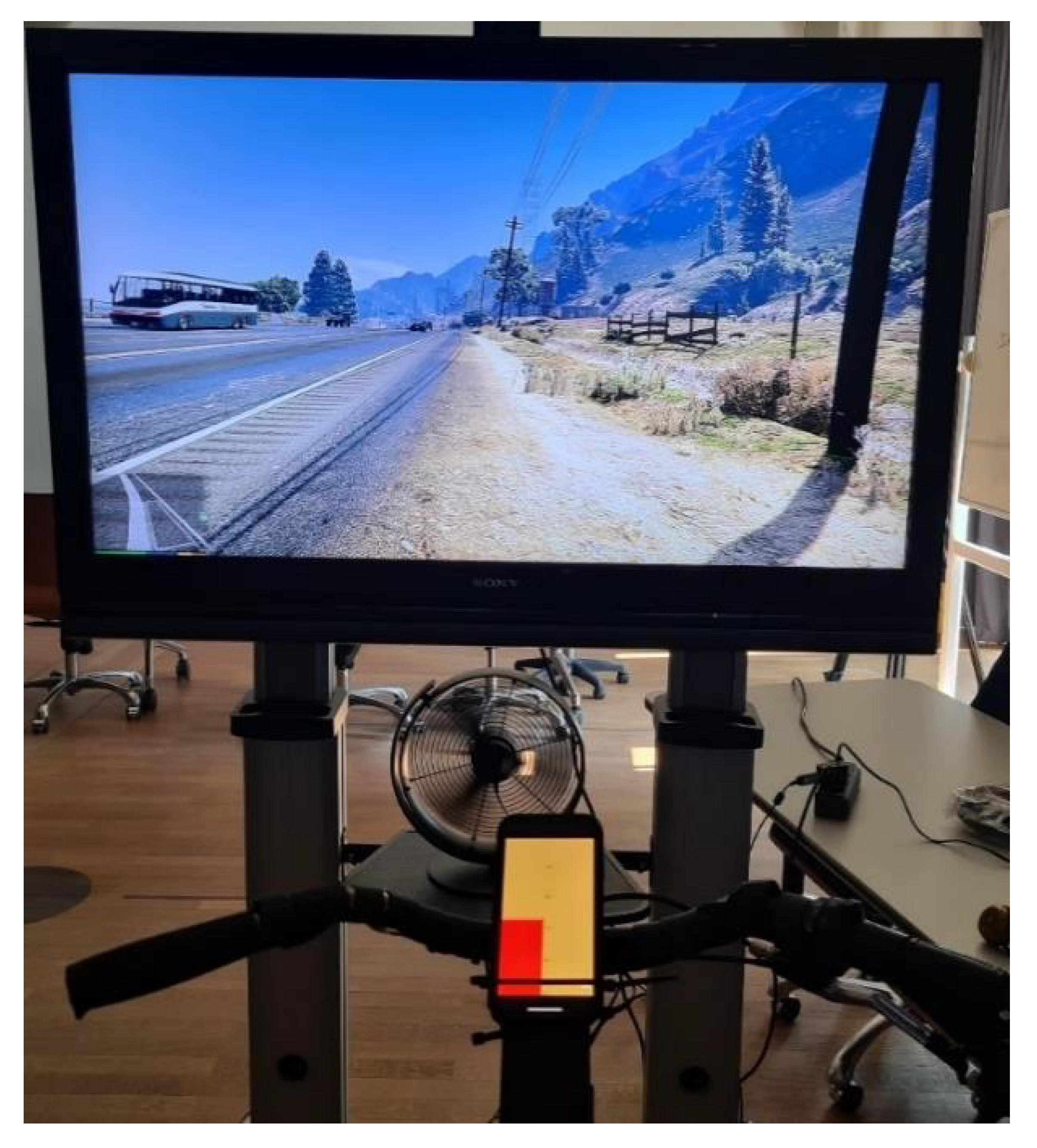
5.3. Full Setup
6. Evaluation
6.1. User Survey
- Missing input precision.
- -
- The maximum cycle speed should be faster [2 subjects].
- -
- More granularity in the speed input [2 subjects].
- -
- Steering not sensitive enough [1 subject].
- Lack of ability to shift weight in curves leading to dizziness [1 subject].
- Disposition due to low resolution, possibly due to low FPS [1 subject].
- Concerns about the structural integrity of the bicycle stand [1 subject].
- Wish for different cycling modes, e.g., e-bikes and e-scooters [1 subject].
6.2. Requirements Check
7. Cognitive Enhancement Technologies Concepts for Safe Rides
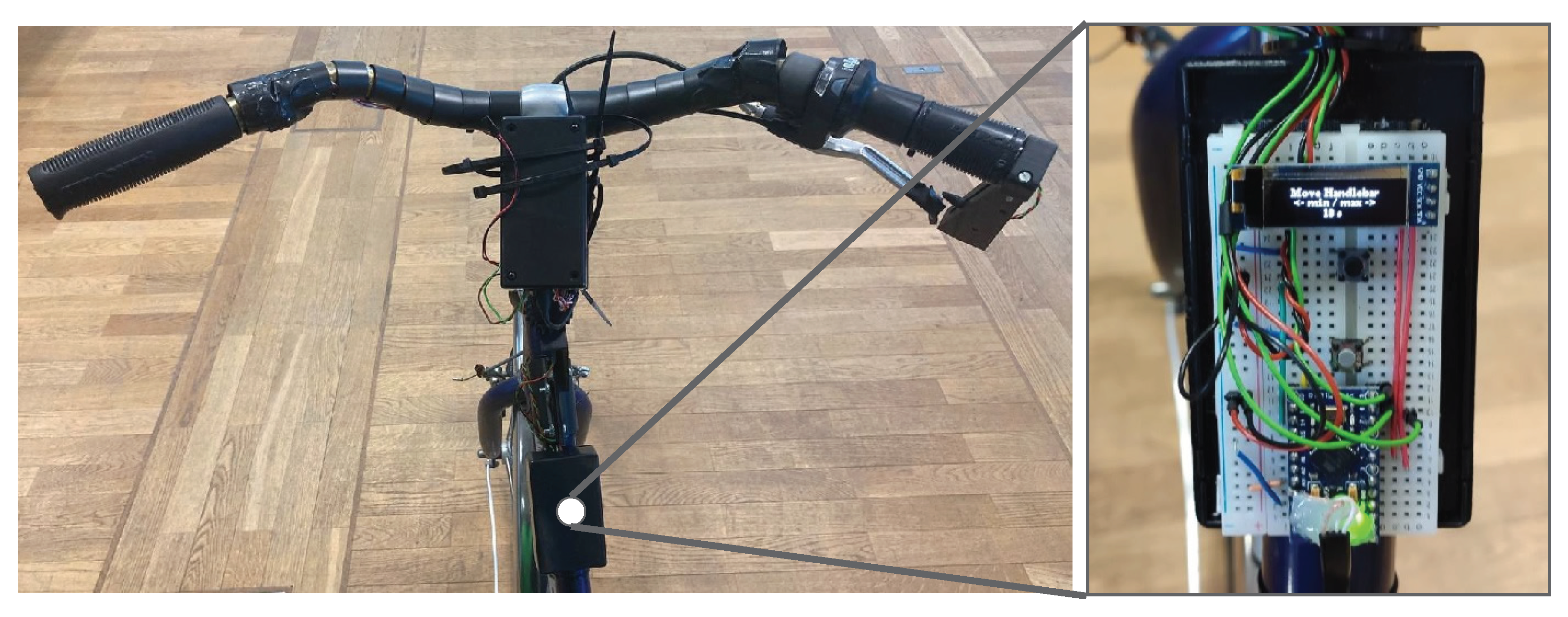
7.1. Tactile Dictionary on the Handlebar
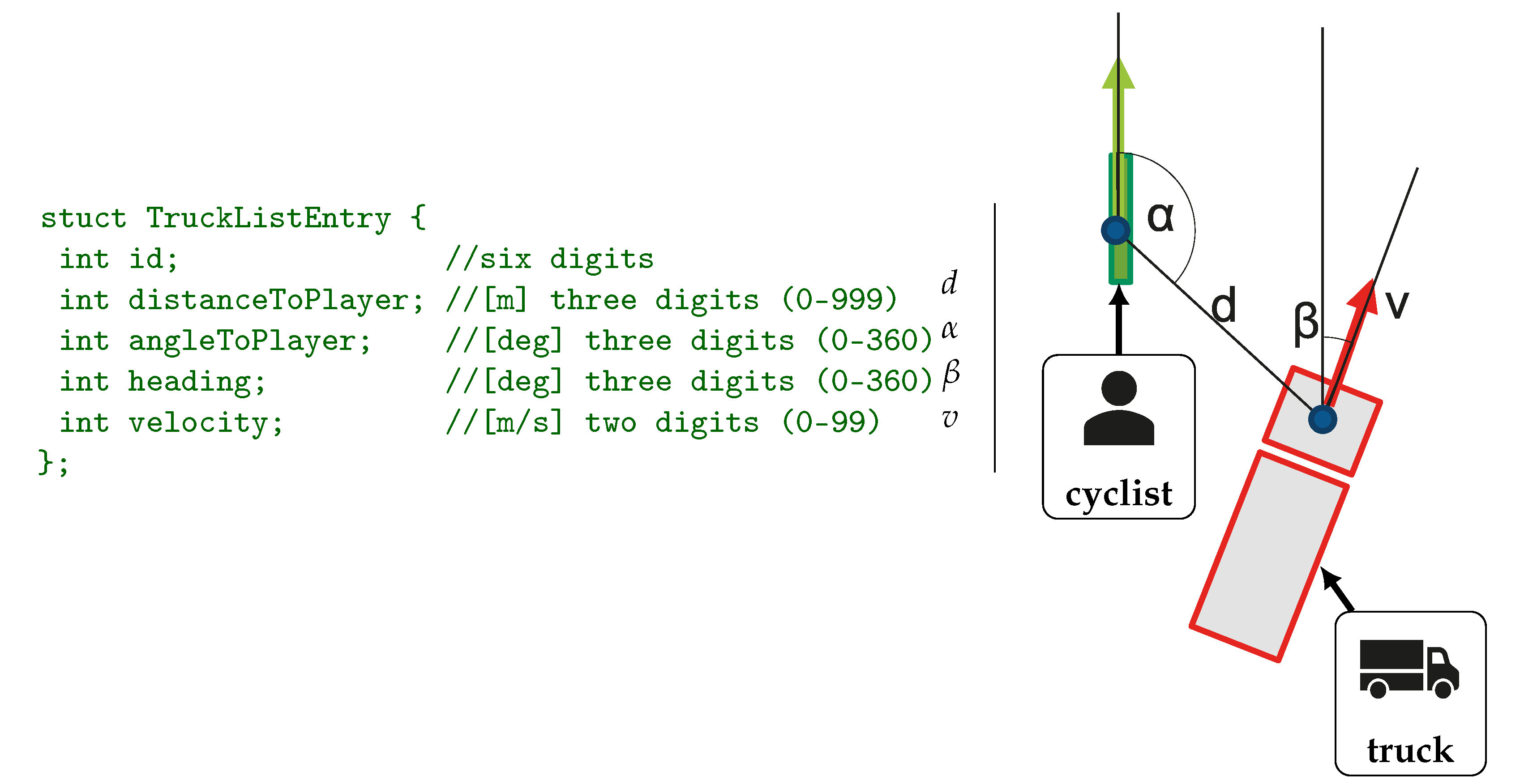
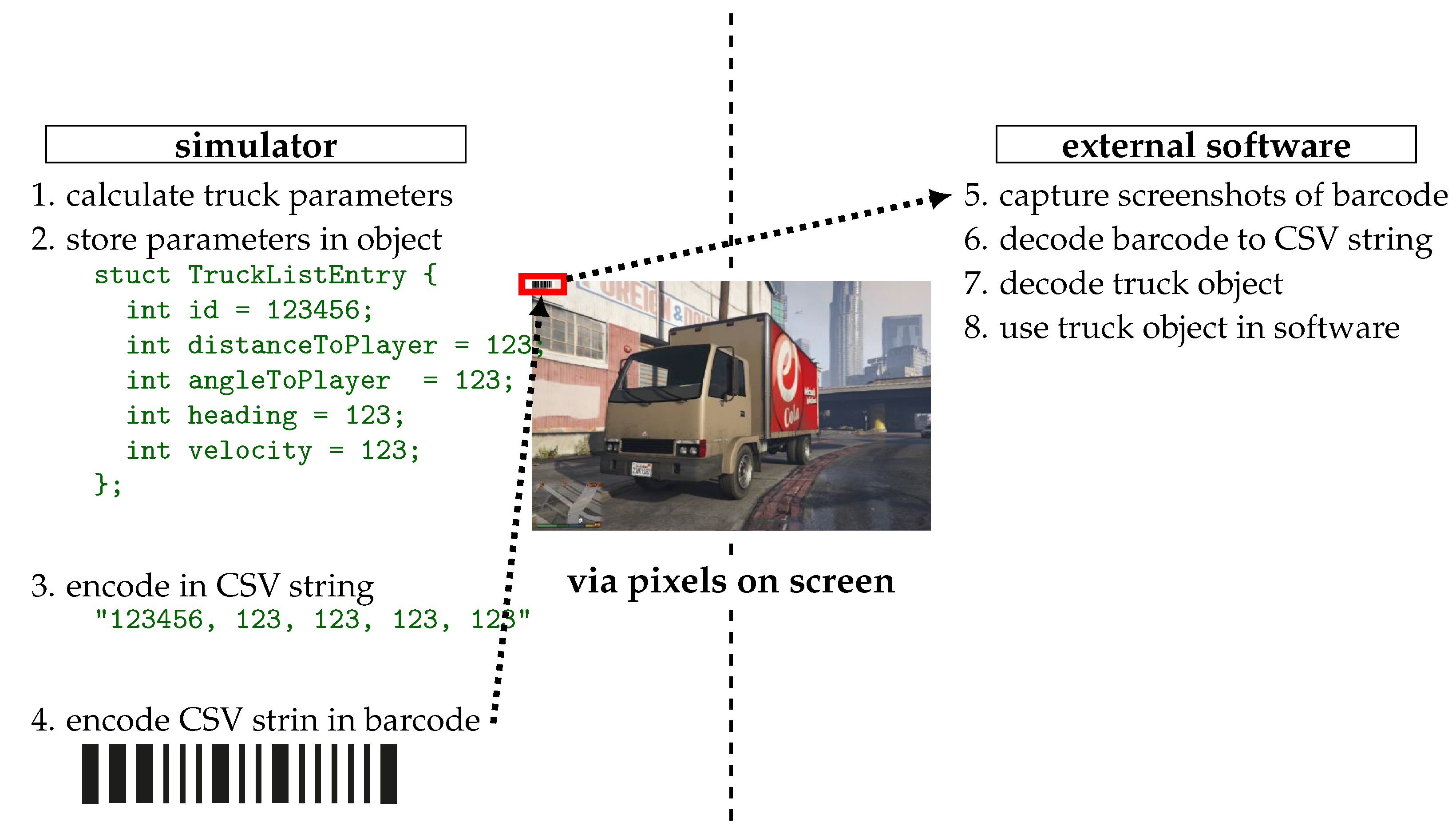
7.2. Visual Block-Shaped Dictionary
7.3. Preliminary Results
8. Conclusions
8.1. Further Works
8.2. Limitations
8.3. Impact on the Society
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

| Input | Example 1 [54] | Example 2 [55] | Example 3 [53] |
|---|---|---|---|
| Speed | yes | yes | yes |
| Braking | no | no | yes (0 to 100%) |
| Steering | yes (left,right) | yes (left,right) | yes (−100 to +100%) |





| incomprehensible | 1 | 1 | 4 | understandable | |||
| creative | 2 | 3 | 1 | uncreative | |||
| easy to learn | 4 | 1 | 1 | hard to learn | |||
| boring | 1 | 1 | 3 | 1 | exiting | ||
| uninteresting | 1 | 1 | 3 | interesting | |||
| original | 2 | 3 | 1 | conventional | |||
| hindering | 1 | 1 | 3 | 1 | supporting | ||
| good | 3 | 2 | 1 | bad | |||
| complicated | 2 | 2 | 2 | simple | |||
| inefficient | 2 | 1 | 3 | efficient | |||
| conservative | 1 | 3 | 2 | innovative | |||
| clear | 3 | 2 | 1 | 1 | confusing | ||
| clean | 3 | 1 | 1 | 1 | overloaded |

References
- Maslow, A.H. A theory of human motivation. Psychol. Rev. 1943, 50, 370–396. [Google Scholar] [CrossRef] [Green Version]
- Karpman, M.; Zuckerman, S.; Gonzalez, D. The Well-Being and Basic Needs Survey; Urban Institute: Washington, DC, USA, 2018. [Google Scholar]
- Stats, P. Wypadki Drogowe—Raporty Roczne. Available online: https://statystyka.policja.pl/st/ruch-drogowy/76562,wypadki-drogowe-raporty-roczne.html (accessed on 7 February 2023).
- Clune, D. Parliamentary Question: Minimum Lateral Clearance Distance When Passing Cyclists: E-002358/2017: European Parliament. Available online: https://www.europarl.europa.eu/doceo/document/E-8-2017-002358_EN.html?redirect (accessed on 7 February 2023).
- Schöning, J.; Heidemann, G. Interactive 3D Modeling—A Survey-based Perspective on Interactive 3D Reconstruction. In Proceedings of the International Conference on Pattern Recognition Applications and Methods, Lisbon, Portugal, SCITEPRESS—Science and Technology Publications, Setúbal, Portugal, 10–12 January 2015. [Google Scholar] [CrossRef]
- Robinson, J. Gut Reactions: A Perceptual Theory of Emotion. Br. J. Aesthet. 2006, 46, 206–208. [Google Scholar] [CrossRef]
- Sandberg, A.; Bostrom, N. Converging Cognitive Enhancements. Ann. N. Y. Acad. Sci. 2006, 1093, 201–227. [Google Scholar] [CrossRef] [Green Version]
- Kipke, R. What Is Cognitive Enhancement and Is It Justified to Point Out This Kind of Enhancement Within the Ethical Discussion? In Trends in Augmentation of Human Performance; Springer: Amsterdam, The Netherlands, 2013; pp. 145–157. [Google Scholar] [CrossRef]
- Dubljević, V.; Venero, C.; Knafo, S. What is Cognitive Enhancement? In Cognitive Enhancement; Elsevier: Amsterdam, The Netherlands, 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Kutt, K.; Gunia, A.; Nalepa, G.J. Cognitive enhancement: How to increase chance of survival in the jungle? In Proceedings of the 2015 IEEE 2nd International Conference on Cybernetics (CYBCONF), Gdynia, Poland, 24–26 June 2015. [Google Scholar] [CrossRef]
- Bostrom, N.; Sandberg, A. Cognitive Enhancement: Methods, Ethics, Regulatory Challenges. Sci. Eng. Ethics 2009, 15, 311–341. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dresler, M.; Sandberg, A.; Bublitz, C.; Ohla, K.; Trenado, C.; Mroczko-Wąsowicz, A.; Kühn, S.; Repantis, D. Hacking the Brain: Dimensions of Cognitive Enhancement. ACS Chem. Neurosci. 2018, 10, 1137–1148. [Google Scholar] [CrossRef] [Green Version]
- Gunia, A.; Indurkhya, B. A Prototype to Study Cognitive and Aesthetic Aspects of Mixed Reality Technologies. In Proceedings of the 2017 3rd IEEE International Conference on Cybernetics (CYBCONF), Exeter, UK, 21–23 June 2017. [Google Scholar] [CrossRef]
- Ervas, F.; Gunia, A.; Lorini, G.; Stojanov, G.; Indurkhya, B. Fostering Safe Behaviors via Metaphor-Based Nudging Technologies; Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2022; pp. 53–63. [Google Scholar] [CrossRef]
- Long, Q.; Hu, N.; Li, H.; Zhang, Y.; Yuan, J.; Chen, A. Suggestion of cognitive enhancement improves emotion regulation. Emotion 2020, 20, 866–873. [Google Scholar] [CrossRef]
- Schöning, J.; Berkemeyer, S. Eyetracking Nutritional Behaviour and Choices. In Communications in Computer and Information Science; Springer Nature: Cham, Switzerland, 2022; pp. 17–31. [Google Scholar] [CrossRef]
- Błażejowska, G.; Gruba, Ł.; Indurkhya, B.; Gunia, A. A Study on the Role of Affective Feedback in Robot-Assisted Learning. Sensors 2023, 23, 1181. [Google Scholar] [CrossRef]
- Wang, S.; Zargar, S.A.; Xu, C.; Yuan, F.G. An Efficient Augmented Reality (AR) System for Enhanced Visual Inspection. In Proceedings of the Structural Health Monitoring 2019, St. Louis, MS, USA, 2–4 August 2019; DEStech Publications, Inc.: Lancaster, PA, USA, 2019. [Google Scholar] [CrossRef]
- Escobedo, L.; Tentori, M.; Quintana, E.; Favela, J.; Garcia-Rosas, D. Using Augmented Reality to Help Children with Autism Stay Focused. IEEE Pervasive Comput. 2014, 13, 38–46. [Google Scholar] [CrossRef]
- Wang, Y.J.; Chen, P.J.; Liang, X.; Lin, Y.H. Augmented reality with image registration, vision correction and sunlight readability via liquid crystal devices. Sci. Rep. 2017, 7, 433. [Google Scholar] [CrossRef] [Green Version]
- Ho, E.; Boffa, J.; Palanker, D. Performance of complex visual tasks using simulated prosthetic vision via augmented-reality glasses. J. Vis. 2019, 19, 22. [Google Scholar] [CrossRef] [Green Version]
- Chang, K.E.; Zhang, J.; Huang, Y.S.; Liu, T.C.; Sung, Y.T. Applying augmented reality in physical education on motor skills learning. Interact. Learn. Environ. 2019, 28, 685–697. [Google Scholar] [CrossRef]
- Rouzier, B.; Murakami, T. Hazard detection and cognition for an active driving assistance. In Proceedings of the 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016. [Google Scholar] [CrossRef]
- Gürbüz, H.; Buyruk, S. Improvement of safe stopping distance and accident risk coefficient based on active driver sight field on real road conditions. IET Intell. Transp. Syst. 2019, 13, 1843–1850. [Google Scholar] [CrossRef]
- Park, B.J.; Lee, J.W.; Yoon, C.; Kim, K.H. Augmented reality and representation in vehicle for safe driving at night. In Proceedings of the 2015 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 28–30 October 2015. [Google Scholar] [CrossRef]
- Abdi, L.; Meddeb, A.; Abdallah, F.B. Augmented Reality Based Traffic Sign Recognition for Improved Driving Safety; Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 94–102. [Google Scholar] [CrossRef]
- Von Sawitzky, T.; Wintersberger, P.; Löcken, A.; Frison, A.K.; Riener, A. Augmentation Concepts with HUDs for Cyclists to Improve Road Safety in Shared Spaces. In Proceedings of the Extended Abstracts of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; ACM: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Pichen, J.; Yan, F.; Baumann, M. Towards a Cooperative Driver-Vehicle Interface: Enhancing Drivers’ Perception of Cyclists through Augmented Reality. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020. [Google Scholar] [CrossRef]
- Wallinheimo, A.S.; Hosein, A.; Barrie, D.; Chernyavskiy, A.; Agafonova, I.; Williams, P. How Online Gaming Could Enhance Your Career Prospects. Simul. Gaming 2022, 54, 28–44. [Google Scholar] [CrossRef]
- ISO 9241-210; DIN EN ISO 9241-210:2019 Ergonomics of Human-System Interaction— Part 210: Human-Centred Design for Interactive Systems. ISO: Geneva, Switzerland, 2019.
- McGarr, O. The use of virtual simulations in teacher education to develop pre-service teachers’ behaviour and classroom management skills: Implications for reflective practice. J. Educ. Teach. 2020, 46, 159–169. [Google Scholar] [CrossRef]
- Lane, B.; Havens-Hafer, C. Teaching the Teachers with Immersive Technology: Preparing the Next Generation of Educators at Ithaca College. In Immersive Education; Springer International Publishing: Berlin/Heidelberg, Germany, 2022; pp. 153–170. [Google Scholar] [CrossRef]
- Rospigliosi, P. Metaverse or Simulacra? Roblox, Minecraft, Meta and the turn to virtual reality for education, socialisation and work. Interact. Learn. Environ. 2022, 30, 1–3. [Google Scholar] [CrossRef]
- Austria, J.A. Traslacion@ Roblox: The Pandemic and The Emergence of A Virtual Black Nazarene Sacred Space. In Proceedings of the 14th DLSU Arts Congress Proceedings: “Pandemic, Resilience, and the Arts”, Manila, Philippines, 11–12 March 2021; De La Salle University Manila: Manila, Philippines, 2021; pp. 1–12. [Google Scholar]
- Aluru, K.C.; Tellex, S.; Oberlin, J.; MacGlashan, J. Minecraft as an experimental world for AI in robotics. In Proceedings of the 2015 AAAI Fall Symposium Series, Arlington, VA, USA, 12–14 November 2015. [Google Scholar]
- García-Fernández, J.; Mateus, L. Solution supporting the communication of the built heritage: Semi-automatic production path to transfer semantic LIDAR data to minecraft environment. Digit. Appl. Archaeol. Cult. Herit. 2019, 14, e00112. [Google Scholar] [CrossRef]
- Cipollone, M.; Schifter, C.C.; Moffat, R.A. Minecraft as a Creative Tool. Int. J. Game-Based Learn. 2014, 4, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Engelbrecht, H.A.; Schiele, G. Koekepan: Minecraft as a research platform. In Proceedings of the 2013 12th Annual Workshop on Network and Systems Support for Games (NetGames), Denver, CO, USA, 9–10 December 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Kale, M.; Bedekar, M. Driver Profiling Using Realistic Racing Games. In Proceedings of the 2018 Second International Conference on Inventive Communication and Computational Technologies (ICICCT), Coimbatore, India, 20–21 April 2018. [Google Scholar] [CrossRef]
- Fischer, P.; Kubitzki, J.; Guter, S.; Frey, D. Virtual driving and risk taking: Do racing games increase risk-taking cognitions, affect, and behaviors? J. Exp. Psychol. Appl. 2007, 13, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Schatten, M.; Ðuric, B.O.; Tomičić, I. Towards simulation of ambient intelligence in autonomous vehicles using car racing games. In Proceedings of the Central European Conference on Information and Intelligent Systems, Varaždin, Croatia, 2–4 October 2019; pp. 3–6. [Google Scholar]
- Notomista, G.; Wang, M.; Schwager, M.; Egerstedt, M. Enhancing Game-Theoretic Autonomous Car Racing Using Control Barrier Functions. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar] [CrossRef]
- Meftah, L.H.; Braham, R. A virtual simulation environment using deep learning for autonomous vehicles obstacle avoidance. In Proceedings of the 2020 IEEE International Conference on Intelligence and Security Informatics (ISI), Arlington, VA, USA, 9–10 November 2020. [Google Scholar] [CrossRef]
- Cirqueira, J.N.; Mesquita, P.C.; Novaes, R.R., Jr.; Dias, S.R. A Multi-Agent Approach to Simulate Autonomous Traffic with Games: How to Transform GTA-SA/SA-MP in Your Simulation Platform. In Proceedings of the Central European Conference on Information and Intelligent Systems, Varaždin, Croatia, 29 August–8 September 2020; pp. 3–6. [Google Scholar]
- Martinez, M.; Sitawarin, C.; Finch, K.; Meincke, L.; Yablonski, A.; Kornhauser, A. Beyond Grand Theft Auto V for Training, Testing and Enhancing Deep Learning in Self Driving Cars. arXiv 2017, arXiv:1712.01397. [Google Scholar] [CrossRef]
- Wang, D.; Devin, C.; Cai, Q.Z.; Krahenbuhl, P.; Darrell, T. Monocular Plan View Networks for Autonomous Driving. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), The Venetian Macao, Macau, China, 3–8 November 2019. [Google Scholar] [CrossRef] [Green Version]
- Goss, Q.; Crump, L.; Akbas, M.I. SUMO Traffic Simulator Interface for Scenic; Embry–Riddle Aeronautical University: Daytona Beach, FL, USA, 2022. [Google Scholar]
- Matas, N. Welcome to GT Bike V. Available online: https://www.gtbikev.com/ (accessed on 7 February 2023).
- Walther, B.K. Using Ludo-Narrative Dissonance in Grand Theft Auto IV as Pedagogical Tool for Ethical Analysis; Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 3–12. [Google Scholar] [CrossRef]
- Vaezipour, A.; Rakotonirainy, A.; Haworth, N.; Delhomme, P. Enhancing eco-safe driving behaviour through the use of in-vehicle human-machine interface: A qualitative study. Transp. Res. Part A Policy Pract. 2017, 100, 247–263. [Google Scholar] [CrossRef]
- Bengler, K.; Drüke, J.; Hoffmann, S.; Manstetten, D.; Neukum, A. (Eds.) UR:BAN Human Factors in Traffic; Springer Fachmedien Wiesbaden: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Dahm, M. Grundlagen der Mensch-Computer-Interaktion; Pearson Deutschland GmbH: Berlin, Germany, 2005. [Google Scholar]
- Tazling. Available online: https://create.arduino.cc/projecthub/Tazling/usbcycle-ride-through-your-virtual-world-8ff961 (accessed on 7 February 2023).
- luxlike. Super Diet Racing Game Sim. Available online: https://create.arduino.cc/projecthub/luxlike/super-diet-racing-game-bike-aad7f2 (accessed on 7 February 2023).
- Smith, M.L.; Desnoyers-Stewart, J. Riding Through Walls: A journey of physical computing through Google Street View. In Proceedings of the Electronic Workshops in Computing, London, UK, 6 July 2019; BCS Learning & Development: London, UK, 2019. [Google Scholar] [CrossRef] [Green Version]
- Madison, D.; Ryseghem, B.V. Arduino XInput Library. Available online: https://github.com/dmadison/ArduinoXInput (accessed on 7 February 2023).
- Blade, A. Script Hook V Native Database. Available online: http://www.dev-c.com/nativedb/ (accessed on 7 February 2023).
- Tse, K.M.; Holder, D. A biomechanical evaluation of a novel airbag bicycle helmet concept for traumatic brain injury mitigation. Bioengineering 2021, 8, 173. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







| Cyclist | Supervisor/Developer | ||
|---|---|---|---|
| ● Safe | 🗹 | ● Repeatable | 🗹 |
| ● Intuitive | 🗹 | ● Modifiable | 🗹 |
| ●Realism | ● Discrete | 🗹 | |
| ● Visual Realism | 🗹 | ● Real-Time Data Interface | 🗹 |
| ● Auditory Realism | 🗹 | ||
| ● Input Realism | 🗹 | ||
| Prop Simulation | Video Playback | Computer Simulation | |
|---|---|---|---|
| Visual Realism | − | + | + |
| Auditory Realism | − | + | + |
| Interactivity | + | − | + |
| Simplicity | + | + | − |
| Repeatability | − | + | + |
| Totally Agree | Agree | Neither | Disagree | Totally Disagree | |
|---|---|---|---|---|---|
| The system was easy to use. | 5 | 1 | |||
| The system was easy to understand. | 5 | 1 | |||
| I would like to use the system every day. | 1 | 1 | 2 | 2 | |
| I had issues with the system. | 2 | 3 | |||
| The system was too complex. | 1 | 3 | 2 | ||
| I quickly learned how to use the system. | 3 | 3 | |||
| I would be able to easily learn how to use the system with only a written manual. | 3 | 1 | 1 | 1 | |
| I felt safe using the system. | 2 | 1 | 2 | ||
| The system was inconcistent. | 2 | 3 | 1 | ||
| Dangerous Situations were simulated realisticly. | 1 | 3 | 2 | ||
| The sytems functions were well integrated. | 3 | 2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schöning, J.; Kettler, J.; Jäger, M.I.; Gunia, A. Grand Theft Auto-Based Cycling Simulator for Cognitive Enhancement Technologies in Dangerous Traffic Situations. Sensors 2023, 23, 3672. https://doi.org/10.3390/s23073672
Schöning J, Kettler J, Jäger MI, Gunia A. Grand Theft Auto-Based Cycling Simulator for Cognitive Enhancement Technologies in Dangerous Traffic Situations. Sensors. 2023; 23(7):3672. https://doi.org/10.3390/s23073672
Chicago/Turabian StyleSchöning, Julius, Jan Kettler, Milena I. Jäger, and Artur Gunia. 2023. "Grand Theft Auto-Based Cycling Simulator for Cognitive Enhancement Technologies in Dangerous Traffic Situations" Sensors 23, no. 7: 3672. https://doi.org/10.3390/s23073672