
Practical Implementation of the Indirect Control to the Direct 3 × 5 Matrix Converter Using DSP and Low-Cost FPGA

Abstract
:1. Introduction
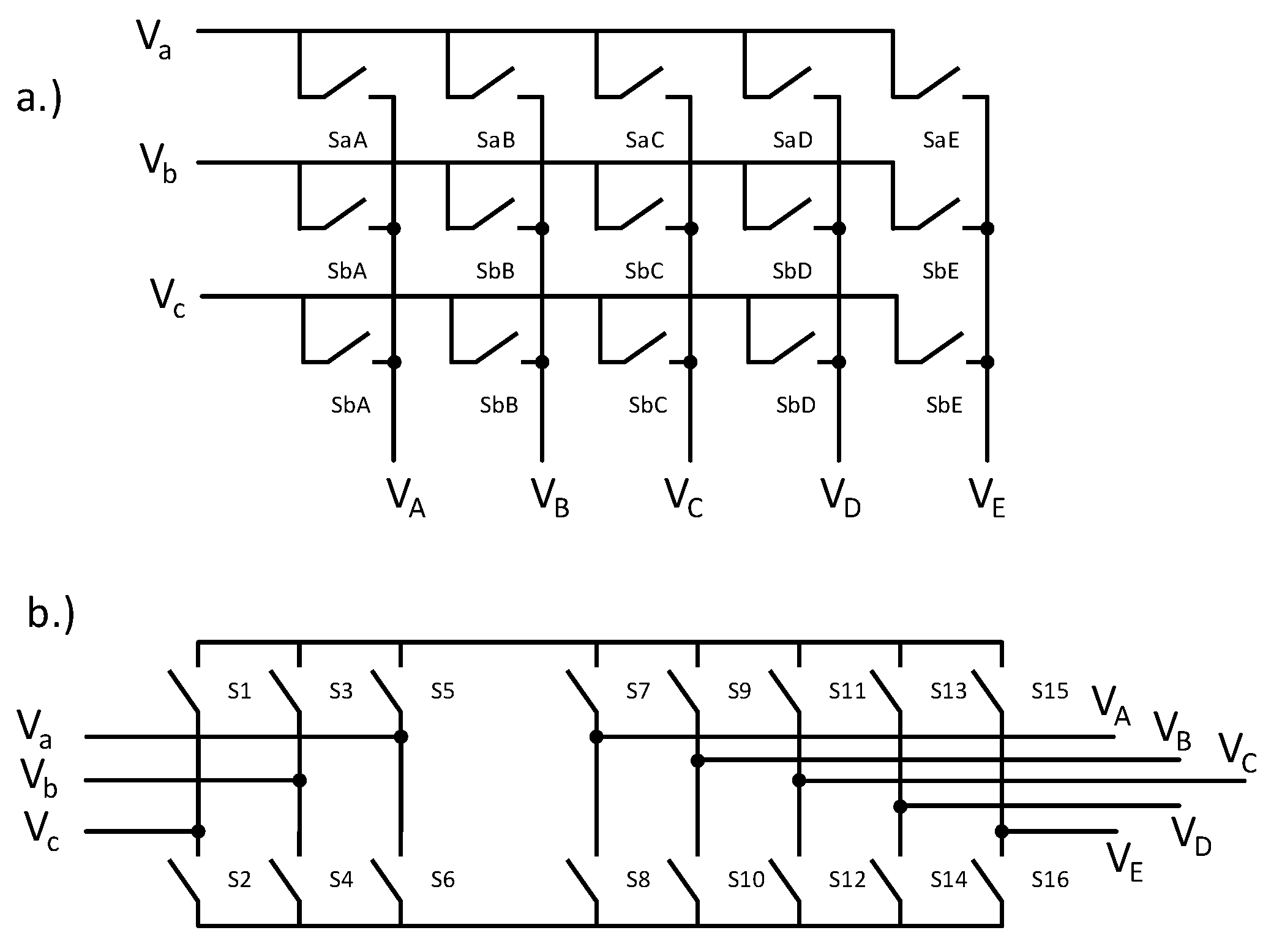
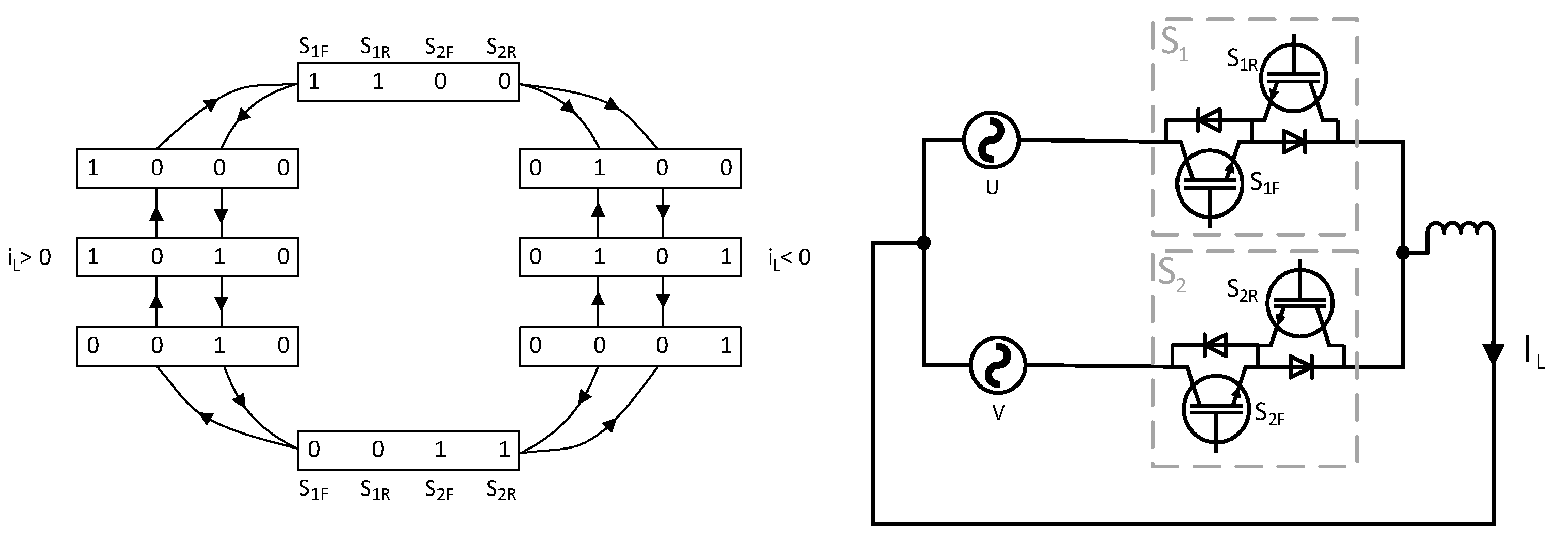
2. Construction of the 3 × 5 Matrix Converter
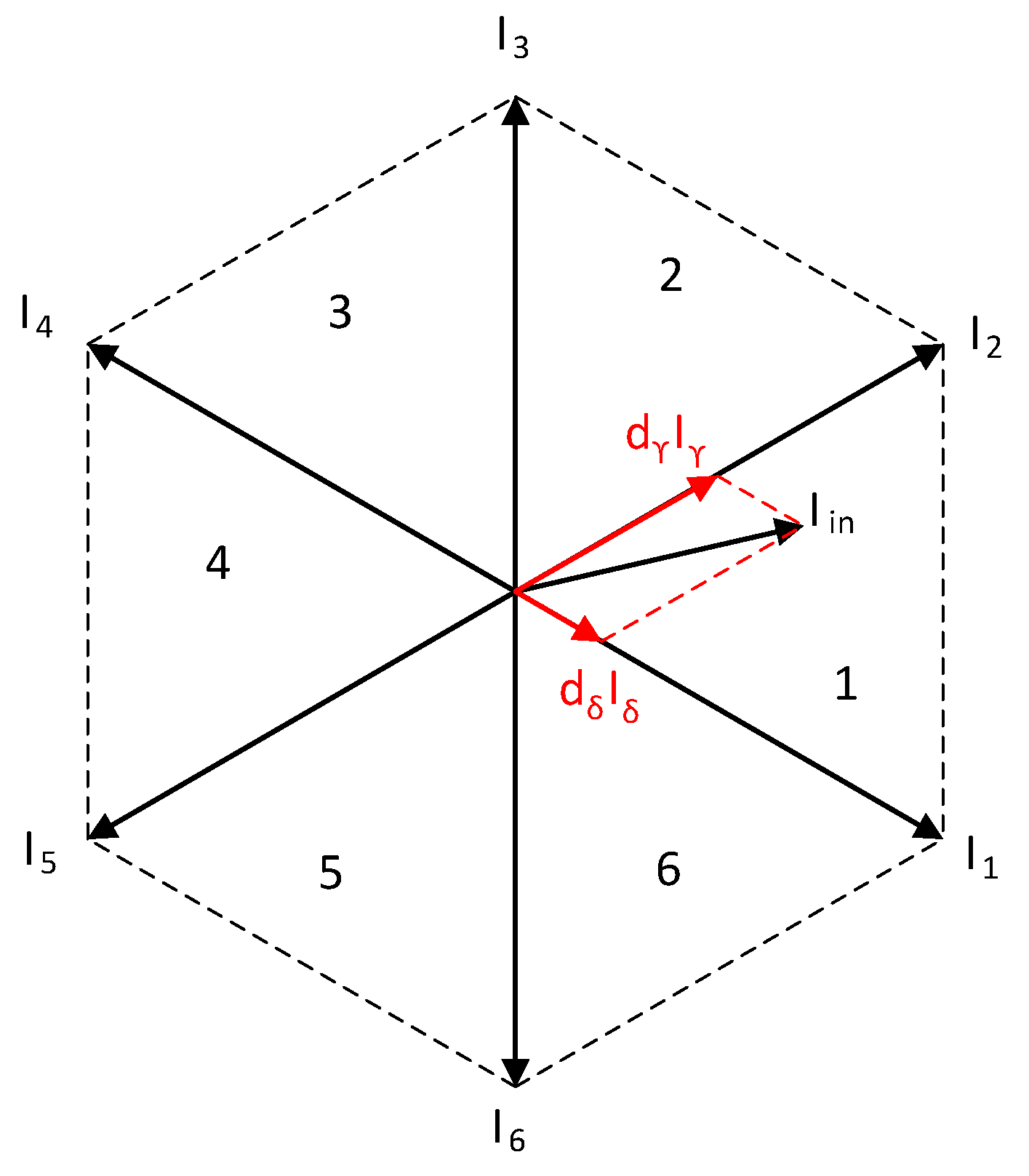
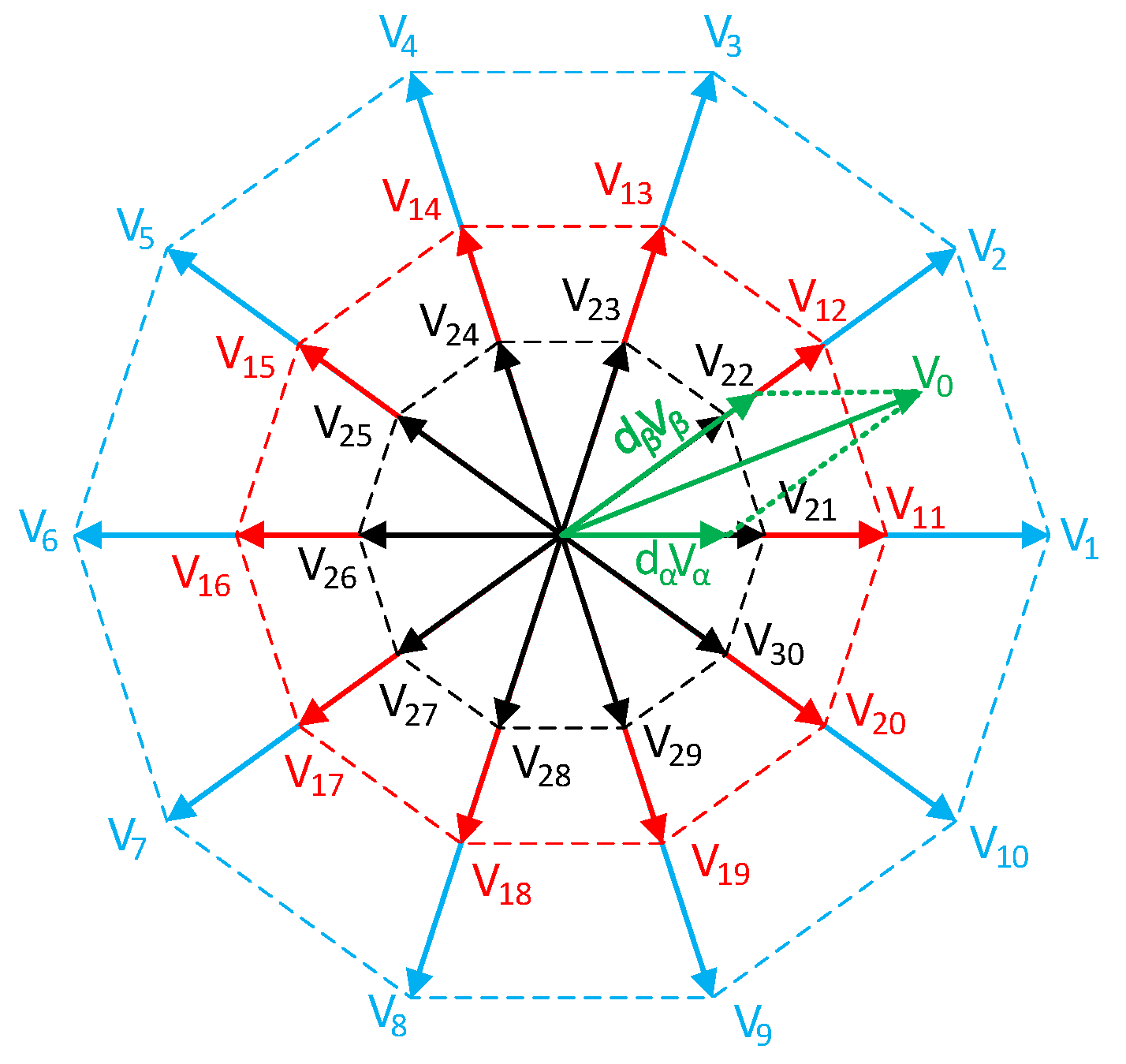
3. Theory of Indirect Control for the Direct Matrix Converter
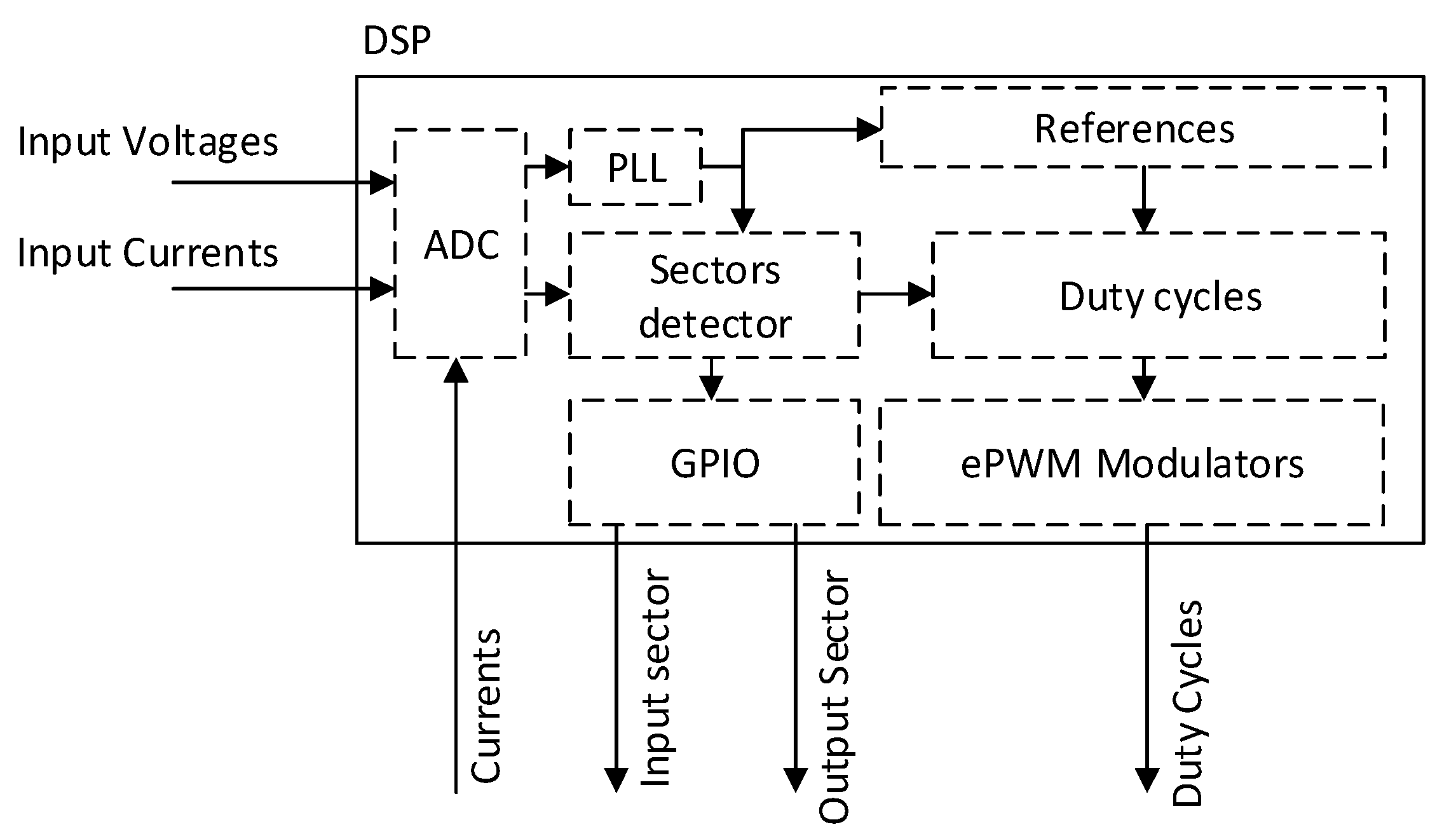
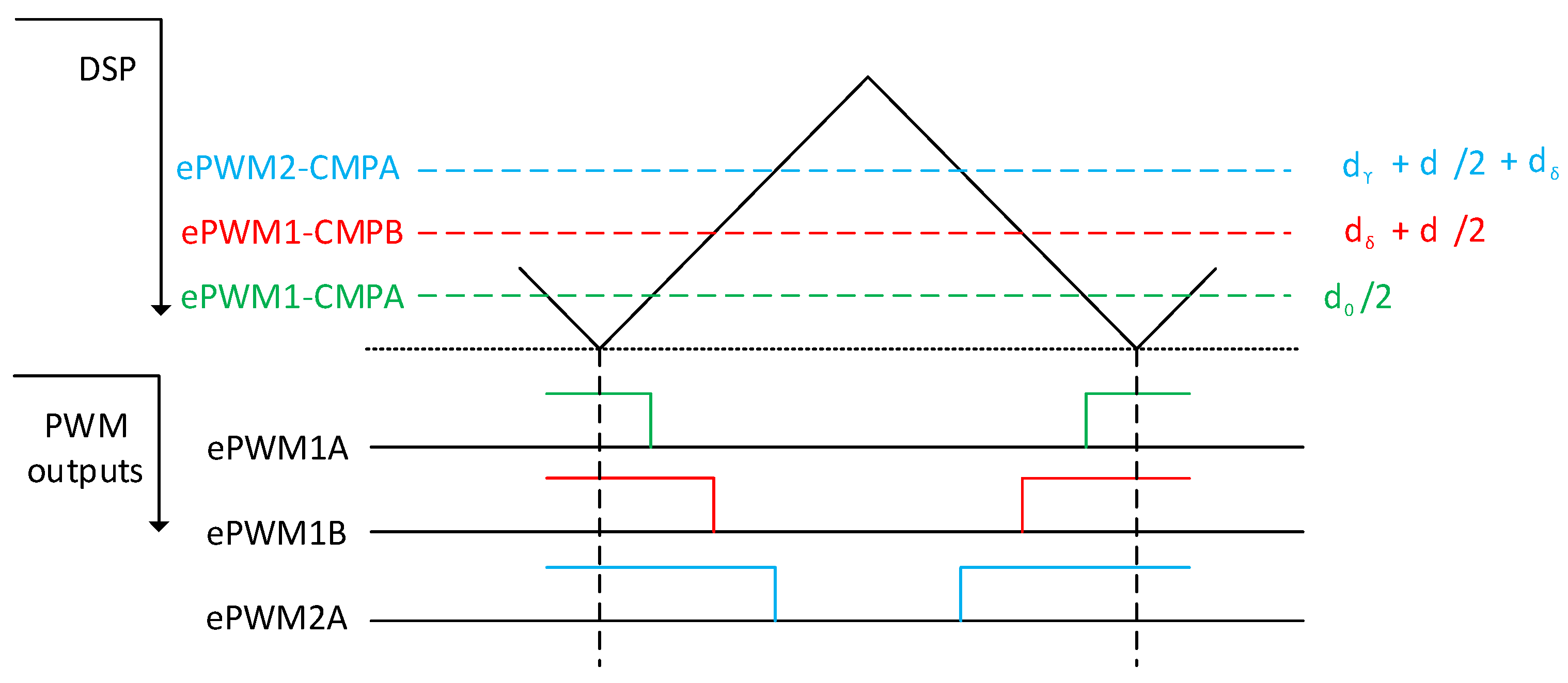
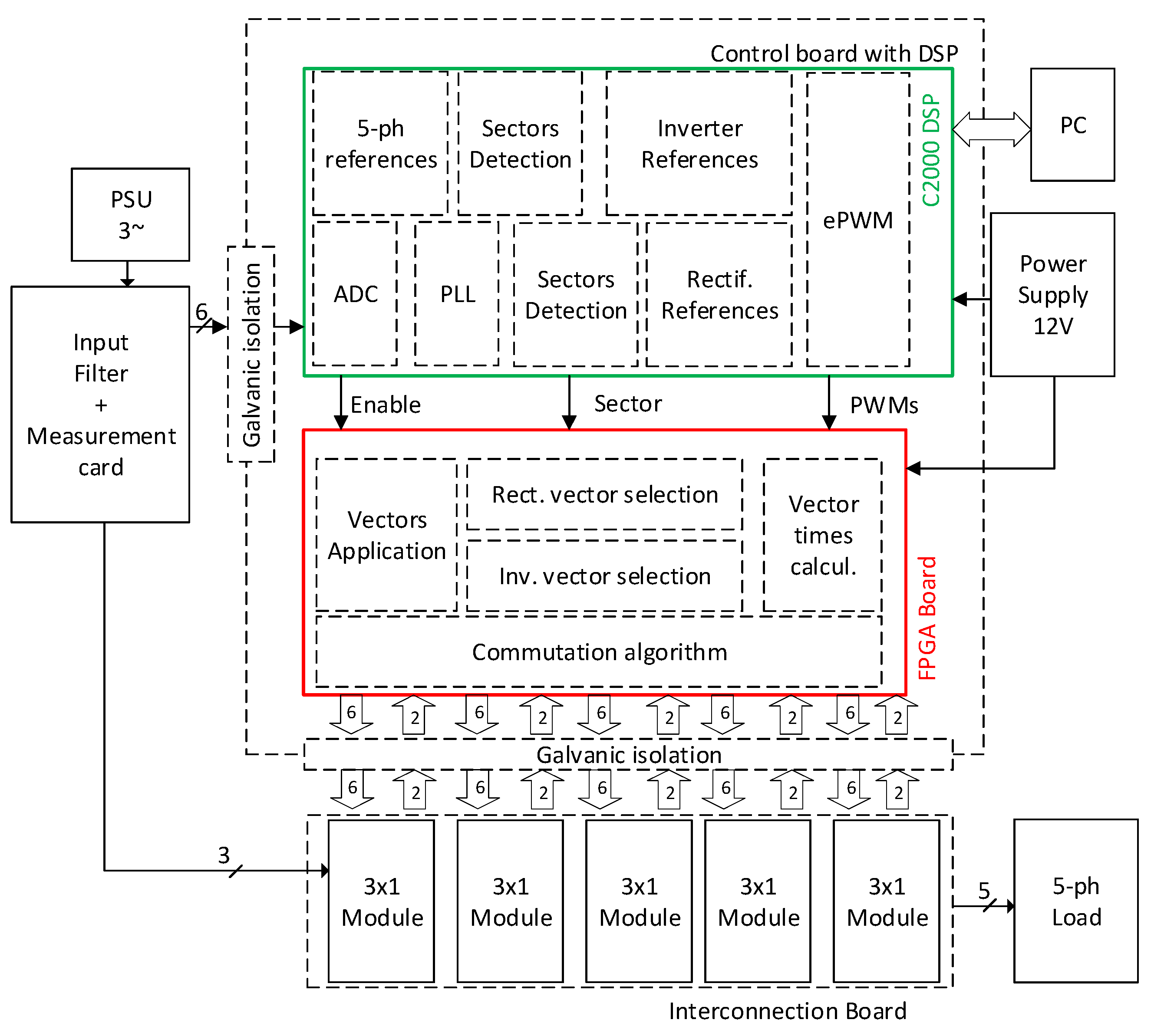
4. Practical Implementation of the Indirect Control
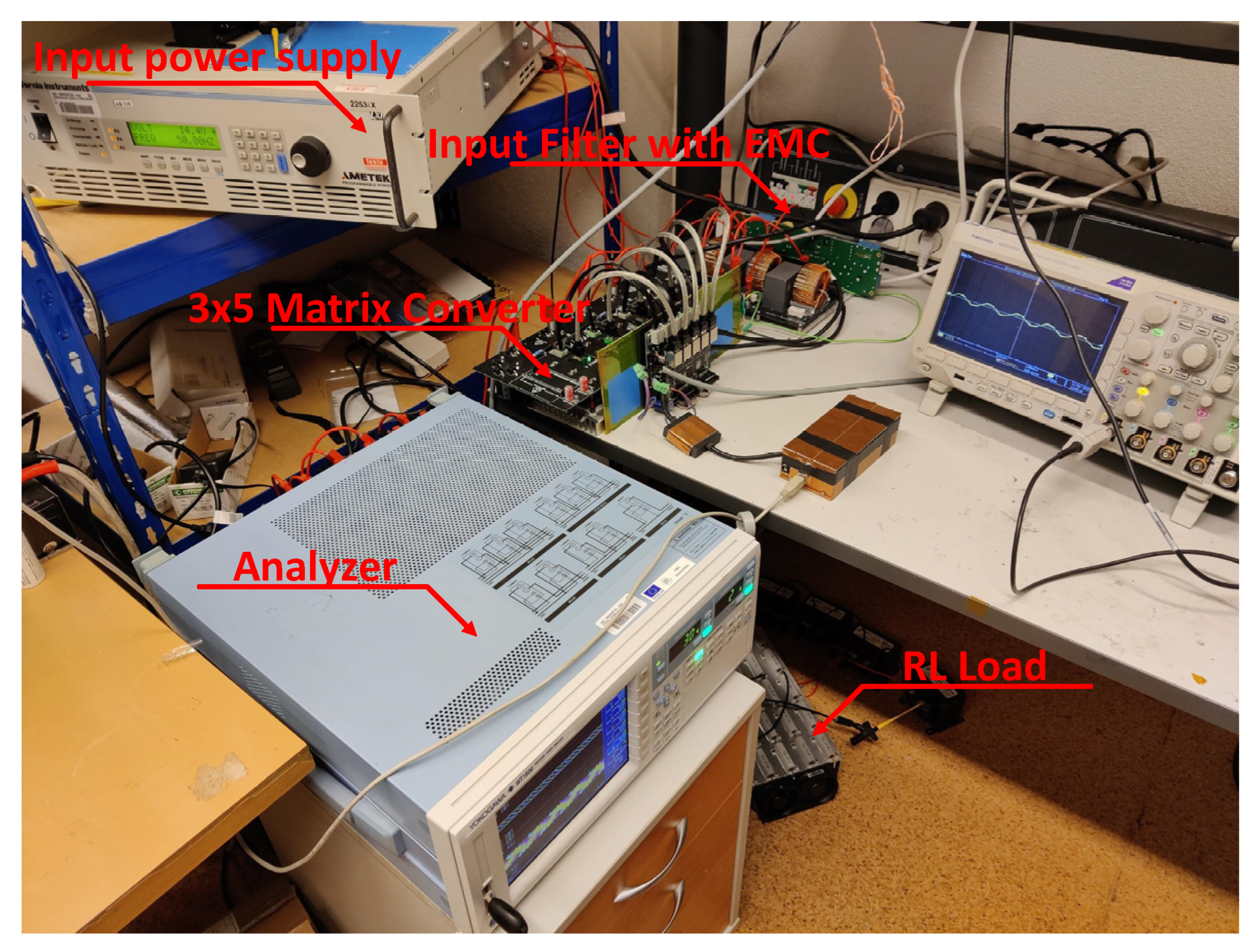
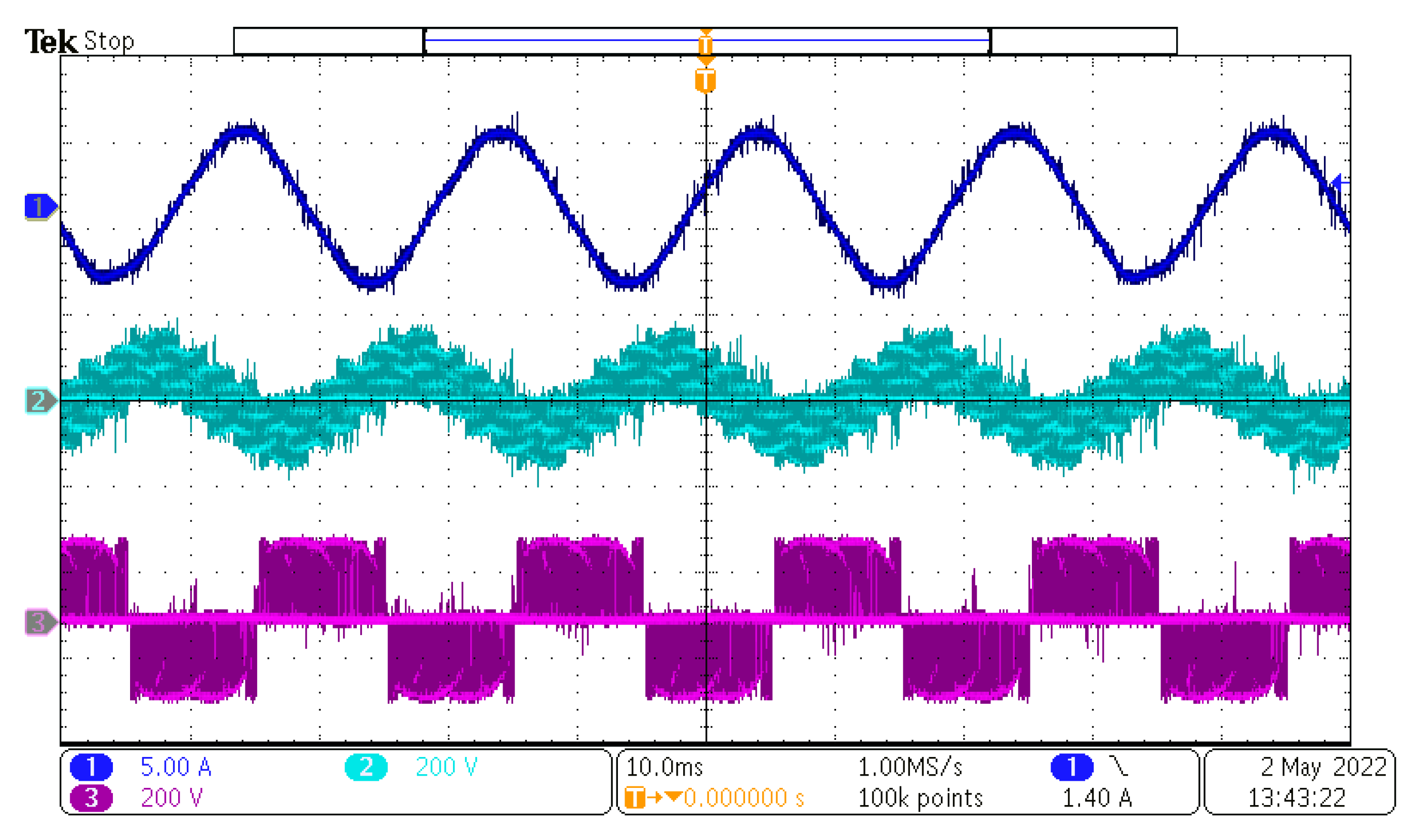
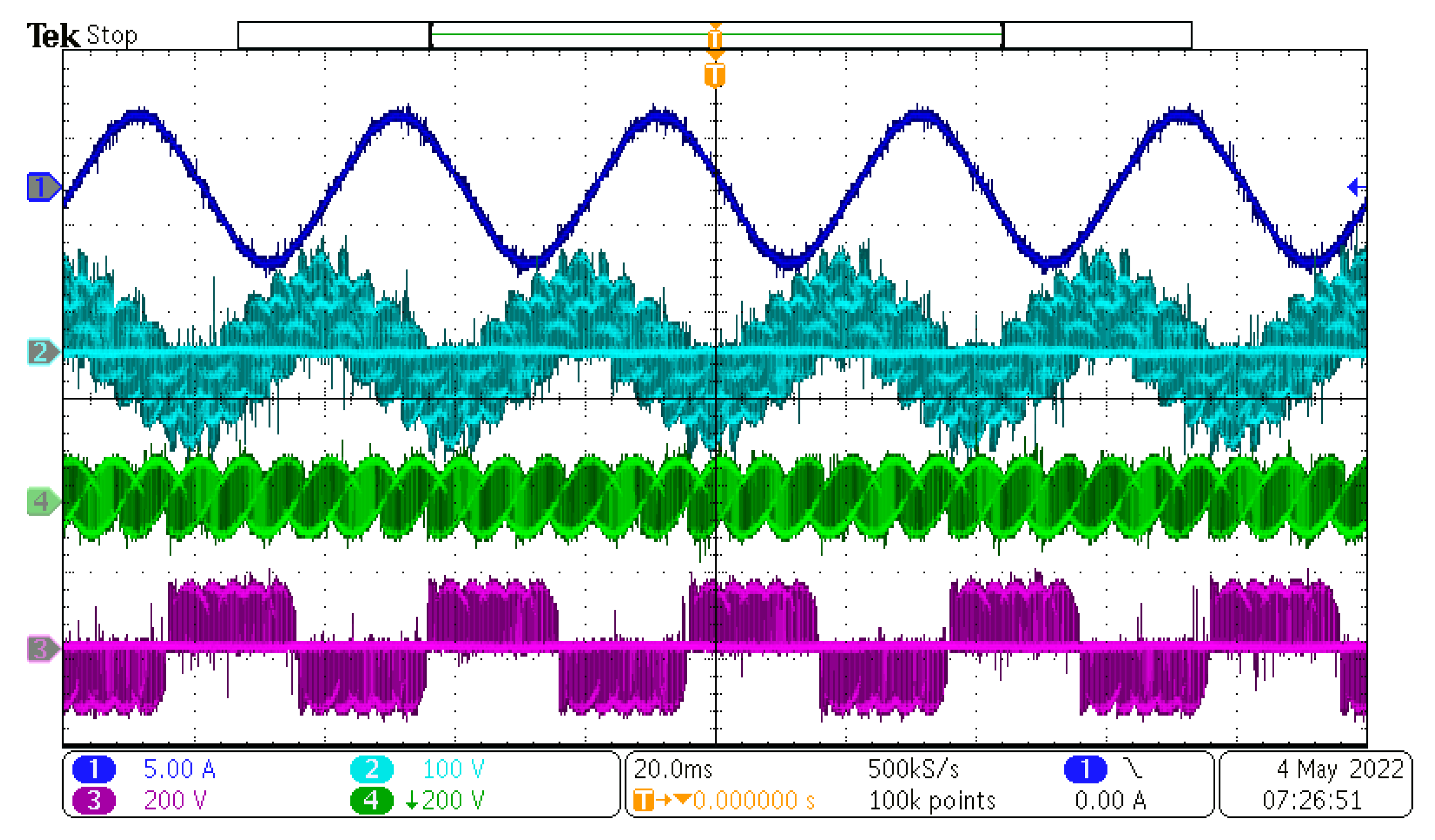
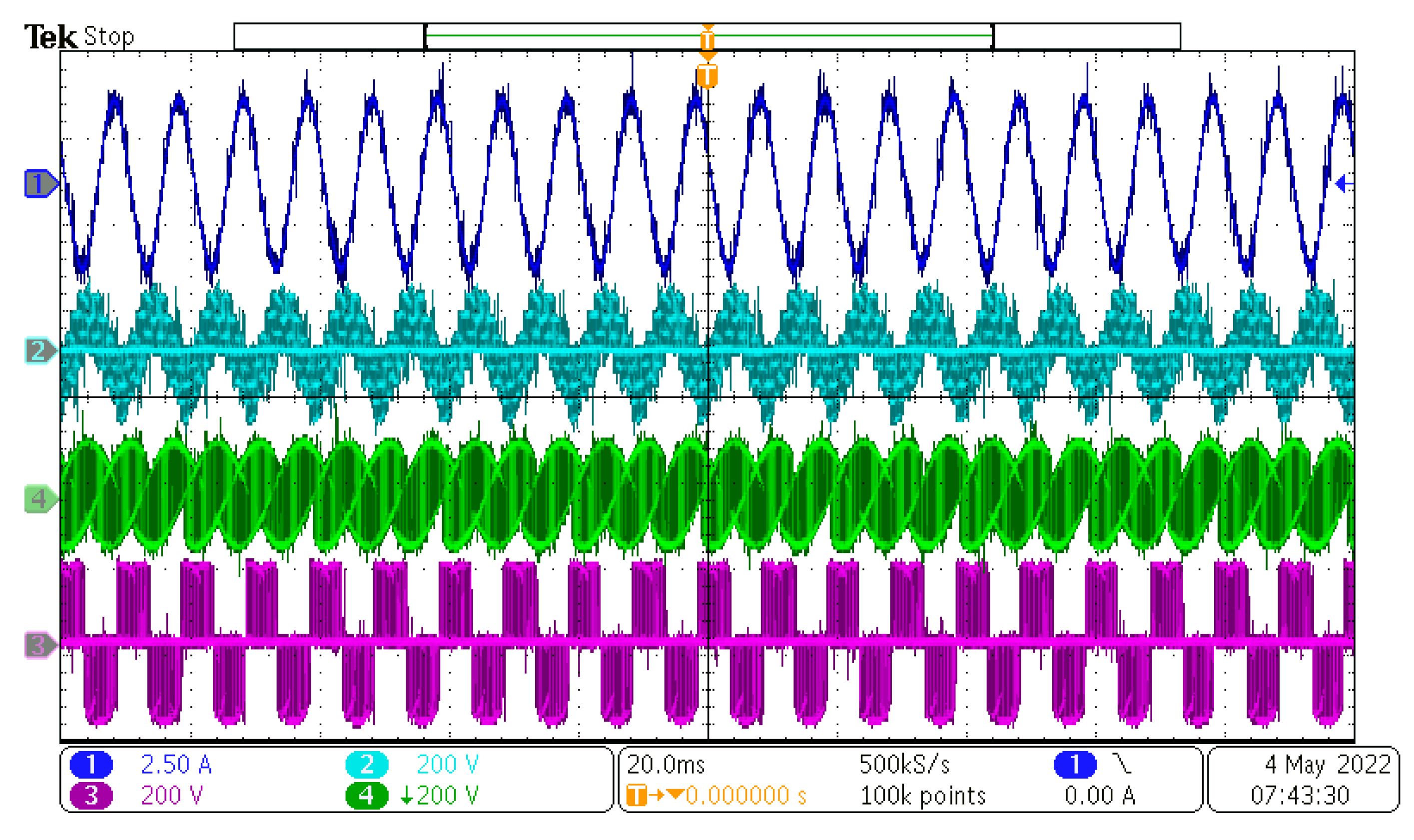
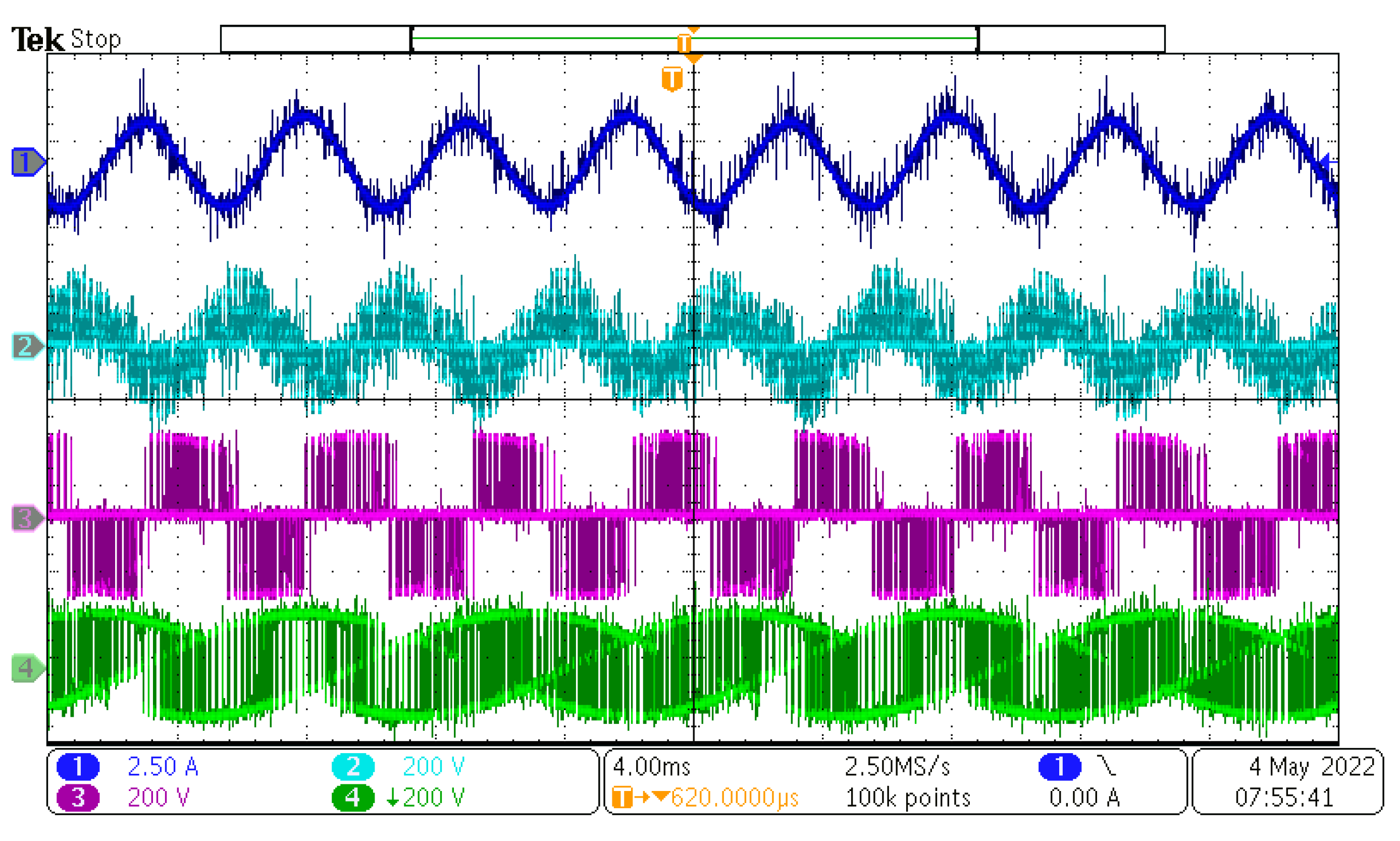
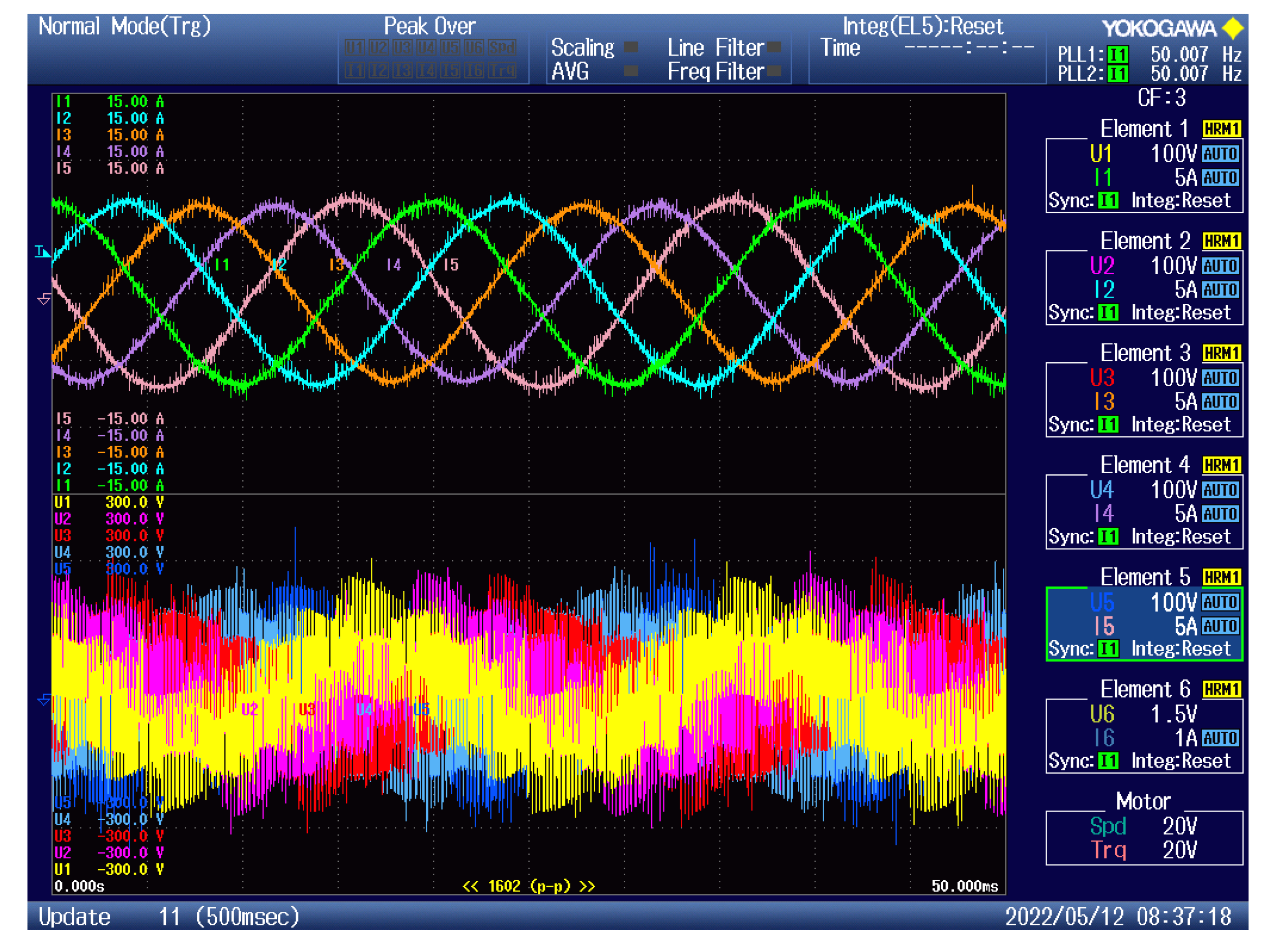
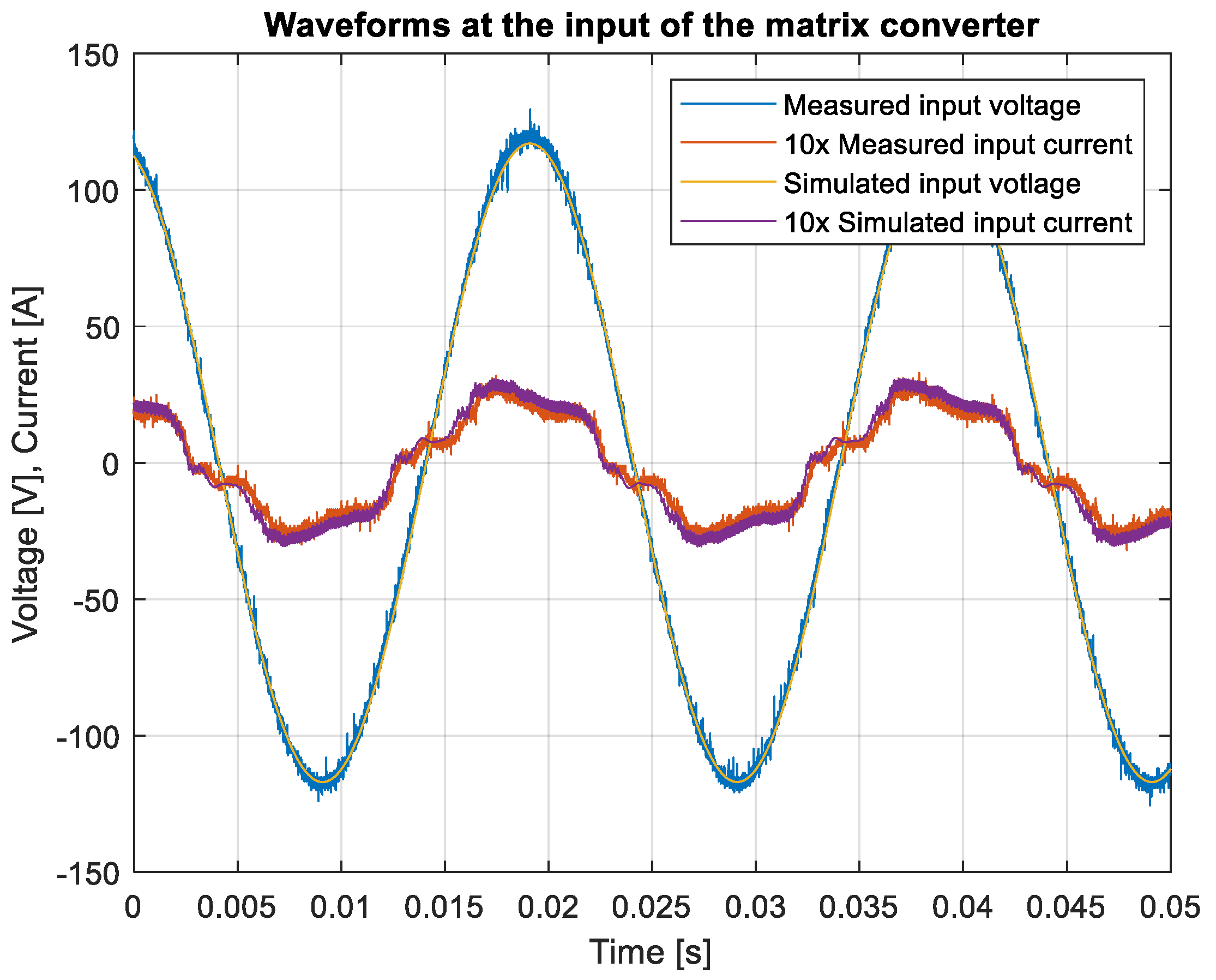
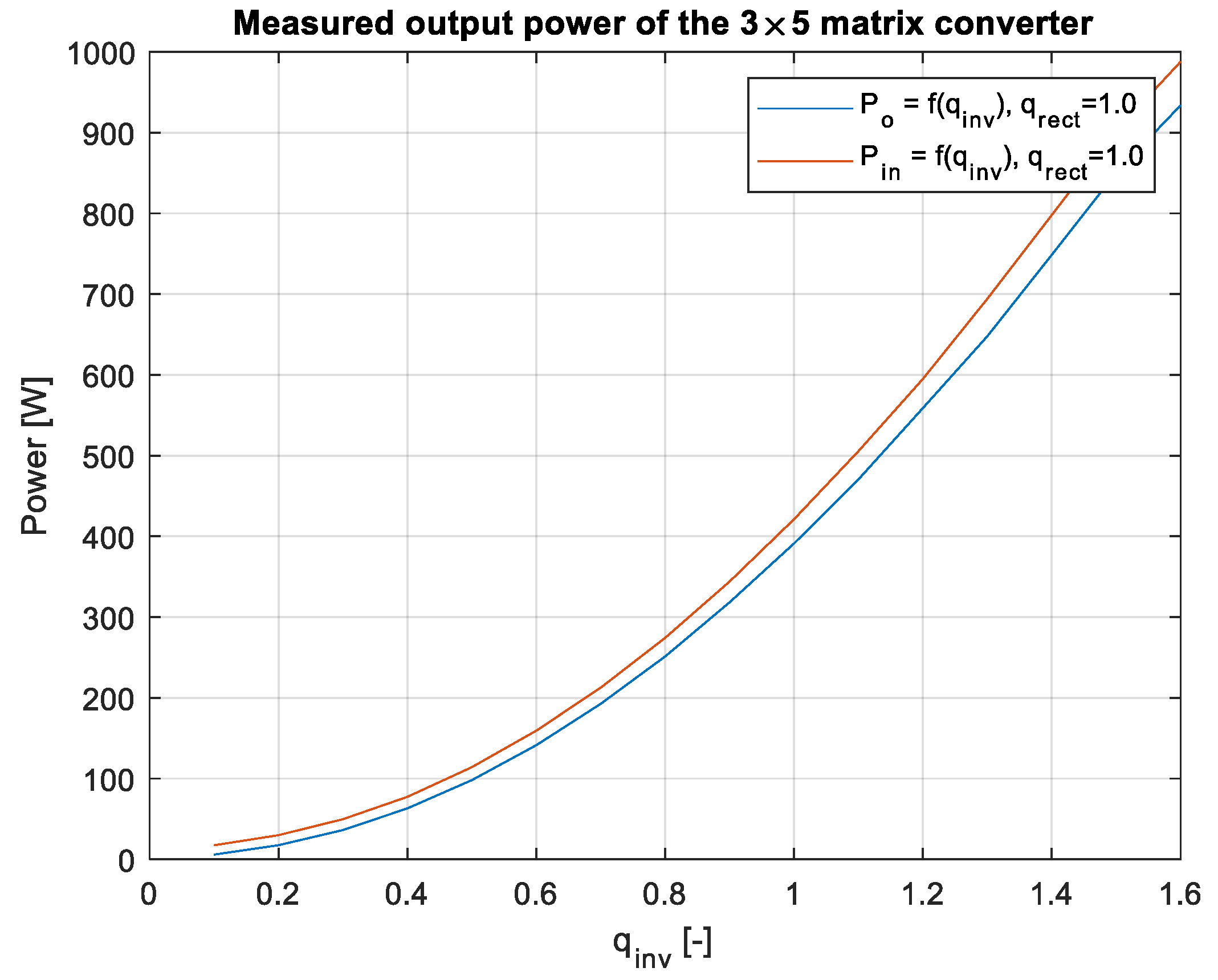
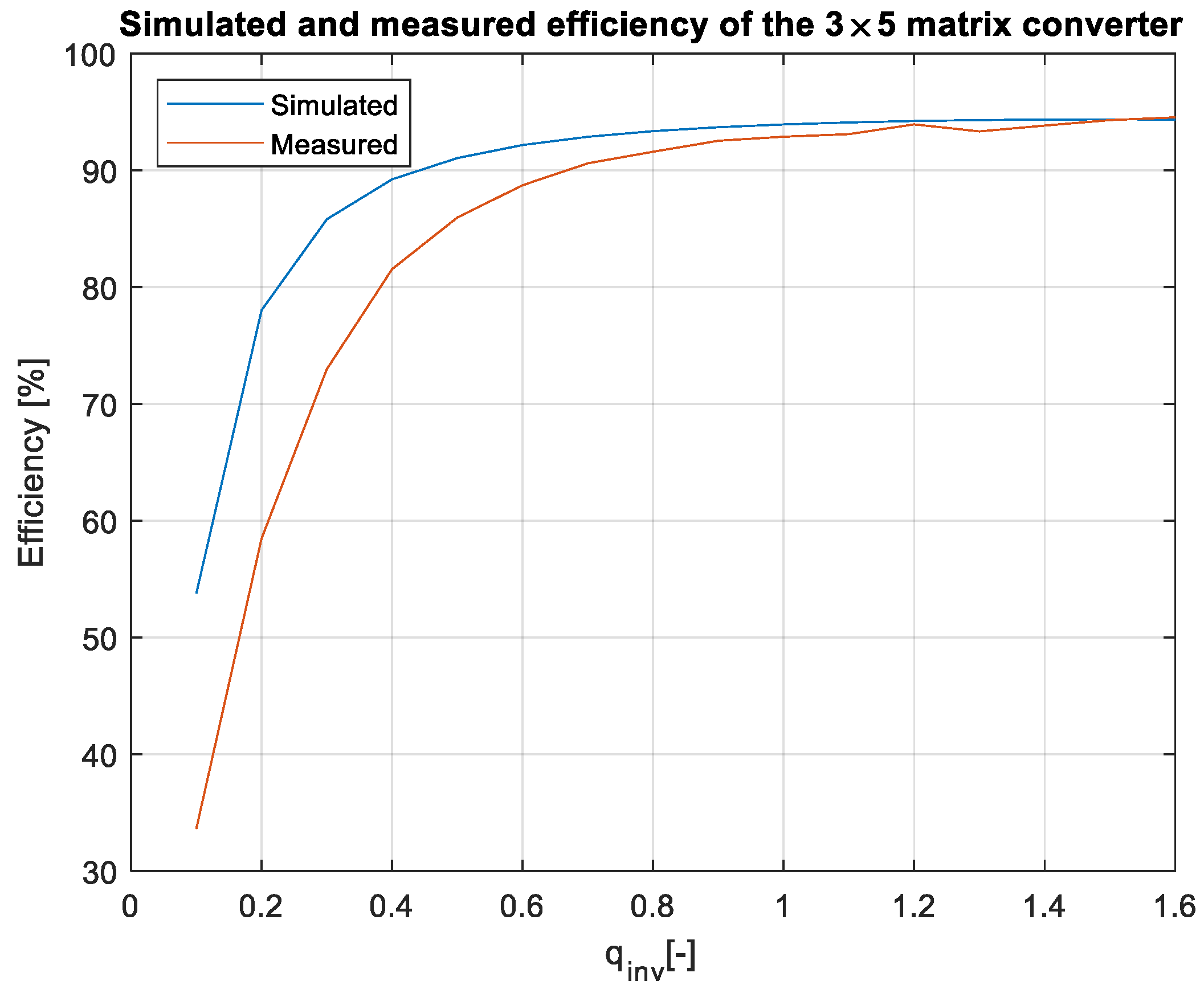
5. Practical Verification of the Indirect Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Parsa, L.; Toliyat, H. Five-Phase Permanent-Magnet Motor Drives. IEEE Trans. Ind. Appl. 2005, 41, 30–37. [Google Scholar] [CrossRef]
- Kellner, J.; Kaščák, S.; Ferková, Ž. Investigation of the Properties of a Five-Phase Induction Motor in the Introduction of New Fault-Tolerant Control. Appl. Sci. 2022, 12, 2249. [Google Scholar] [CrossRef]
- Kellner, J.; Kaščák, S.; Praženica, M.; Resutík, P. A Comprehensive Investigation of the Properties of a Five-Phase Induction Motor Operating in Hazardous States in Various Connections of Stator Windings. Electronics 2021, 10, 609. [Google Scholar] [CrossRef]
- Baek, S.-K.; Shin, H.-U.; Kang, S.-Y.; Park, C.-S.; Lee, K.-B. Open Fault Detection and Tolerant Control for a Five Phase Inverter Driving System. Energies 2016, 9, 355. [Google Scholar] [CrossRef] [Green Version]
- Kuchar, M.; Palacky, P.; Simonik, P.; Strossa, J. Self-Tuning Observer for Sensor Fault-Tolerant Control of Induction Motor Drive. Energies 2021, 14, 2564. [Google Scholar] [CrossRef]
- Song, Q.; Zhang, X.; Yu, F.; Zhang, C. Research on PWM techniques of five-phase three-level inverter. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Taormina, Italy, 23–26 May 2006; pp. 561–565. [Google Scholar] [CrossRef]
- Deng, F.; Hou, J.; Jiang, P.; Zhang, H.; Zhu, K.; Hu, Y. Modular Multilevel Converter and Cycloconverter Based Machine Drive Systems. In Proceedings of the IECON 2020: The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 5296–5301. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulator for forced commutated cycloconverters. In Proceedings of the Conference Record of the IEEE Industry Applications Society Annual Meeting, San Diego, CA, USA, 1–5 October 1989; Volume 1, pp. 871–876. [Google Scholar] [CrossRef]
- Das, S.; Chattopadhyay, A. Observer-based stator-flux-oriented vector control of cycloconverter-fed synchronous motor drive. IEEE Trans. Ind. Appl. 1997, 33, 943–955. [Google Scholar] [CrossRef]
- Kharjule, S. Voltage source inverter. In Proceedings of the 2015 International Conference on Energy Systems and Applications, Pune, India, 30 October–1 November 2015; pp. 537–542. [Google Scholar] [CrossRef]
- Xu, H.; Toliyat, H.; Petersen, L. Five-phase induction motor drives with DSP-based control system. IEEE Trans. Power Electron. 2002, 17, 524–533. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Abdou, A.; El-Kholy, E.; Shokrall, S. Application of matrix converter connected to wind energy system. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; pp. 604–609. [Google Scholar] [CrossRef]
- Flicker, J.; Kaplar, R.; Marinella, M.; Granata, J. Lifetime testing of metallized thin film capacitors for inverter applications. In Proceedings of the 2013 IEEE 39th Photovoltaic Specialists Conference (PVSC), Tampa, FL, USA, 16–21 June 2013; pp. 3340–3342. [Google Scholar] [CrossRef] [Green Version]
- Wheeler, P.W.; Rodriguez, J.; Clare, J.C.; Empringham, L.; Weinstein, A. Matrix converters: A technology review. IEEE Trans. Ind. Electron. 2002, 49, 276–288. [Google Scholar] [CrossRef]
- Kolar, J.W.; Schafmeister, F.; Round, S.D.; Ertl, H. Novel Three-Phase AC–AC Sparse Matrix Converters. IEEE Trans. Power Electron. 2007, 22, 1649–1661. [Google Scholar] [CrossRef]
- Dabour, S.M.; Hassan, A.E.-W.; Rashad, E.M. Analysis and implementation of space vector modulated five-phase matrix converter. Int. J. Electr. Power Energy Syst. 2014, 63, 740–746. [Google Scholar] [CrossRef]
- Venturini, M. A new sine wave in sine wave out conversion technique which eliminates reactive elements. Proc. Powercon 1980, 7, E3-1–E3-15. [Google Scholar]
- Alesiana, A.; Venturini, M. Analysis and design of optimum-amplitude nine-switch direct AC–AC converters. IEEE Trans. Power Electron. 1989, 4, 101–112. [Google Scholar] [CrossRef]
- Tuyen, N.D.; Dzung, P.Q. Space Vector Modulation for an Indirect Matrix Converter with Improved Input Power Factor. Energies 2017, 10, 588. [Google Scholar] [CrossRef] [Green Version]
- Empringham, L.; Kolar, J.W.; Rodriguez, J.; Wheeler, P.W.; Clare, J.C. Technological Issues and Industrial Application of Matrix Converters: A Review. IEEE Trans. Ind. Electron. 2013, 60, 4260–4271. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Gruson, F.; Idir, N.; Le Moigne, P. Turn-on Performance of Reverse Blocking IGBT (RB IGBT) and Optimization Using Advanced Gate Driver. IEEE Trans. Power Electron. 2009, 25, 970–980. [Google Scholar] [CrossRef]
- Guerriero, P.; Orcioni, S.; Matacena, I.; Daliento, S. A GaN based bidirectional switch for matrix converter applications. In Proceedings of the 2020 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 24–26 June 2020; pp. 375–380. [Google Scholar] [CrossRef]
- Umeda, H.; Yamada, Y.; Asanuma, K.; Kusama, F.; Kinoshita, Y.; Ueno, H.; Ishida, H.; Hatsuda, T.; Ueda, T. High power 3-phase to 3-phase matrix converter using dual-gate GaN bidirectional switches. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 894–897. [Google Scholar] [CrossRef]
- Escobar-Mejia, A.; Stewart, C.; Hayes, J.K.; Ang, S.S.; Balda, J.C.; Talakokkula, S. Realization of a Modular Indirect Matrix Converter System Using Normally Off SiC JFETs. IEEE Trans. Power Electron. 2013, 29, 2574–2583. [Google Scholar] [CrossRef]
- Koiwa, K.; Itoh, J. Evaluation of a maximum power density design method for matrix converter using SiC-MOSFET. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 563–570. [Google Scholar] [CrossRef]
- Friedli, T.; Round, S.D.; Kolar, J.W. A 100 kHz SiC Sparse Matrix Converter. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 2148–2154. [Google Scholar] [CrossRef]
- Resutík, P.; Kaščák, S. Compact 3 × 1 Matrix Converter Module Based on the SiC Devices with Easy Expandability. Appl. Sci. 2021, 11, 9366. [Google Scholar] [CrossRef]
- Dabour, S.M.; Allam, S.M.; Rashad, E.E.M. Three-to-Five-Phase Matrix Converter Using Carrier-based PWM Technique. Renew. Energy Sustain. Dev. J. 2016, 2, 1–12. [Google Scholar]
- Liu, T.-H.; Chang, K.-H.; Li, J.-H. Design and Implementation of Periodic Control for a Matrix Converter-Based Interior Permanent Magnet Synchronous Motor Drive System. Energies 2021, 14, 8073. [Google Scholar] [CrossRef]
- Available online: https://www.ti.com/lit/an/snva538/snva538.pdf (accessed on 16 February 2023).
- Varajão, D.; Araújo, R.E. Modulation Methods for Direct and Indirect Matrix Converters: A Review. Electronics 2021, 10, 812. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rectifier Sector | Iδ | Iϒ | I0 |
|---|---|---|---|
| 1 | I1 | I2 | I7 |
| 2 | I2 | I3 | I9 |
| 3 | I3 | I4 | I8 |
| 4 | I4 | I5 | I7 |
| 5 | I5 | I6 | I9 |
| 6 | I6 | I1 | I8 |
| Vector/Switch | S1 | S3 | S5 | S2 | S4 | S6 |
|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 | 1 | 0 |
| 2 | 1 | 0 | 0 | 0 | 0 | 1 |
| 3 | 0 | 1 | 0 | 0 | 0 | 1 |
| 4 | 0 | 1 | 0 | 1 | 0 | 0 |
| 5 | 0 | 0 | 1 | 1 | 0 | 0 |
| 6 | 0 | 1 | 1 | 0 | 0 | 0 |
| 7 | 1 | 0 | 0 | 1 | 0 | 0 |
| 8 | 0 | 1 | 0 | 0 | 1 | 0 |
| 9 | 0 | 0 | 1 | 0 | 0 | 1 |
| Sector | Vα m | Vα l | Vβ m | Vβ l | Vz1 | Vz2 |
|---|---|---|---|---|---|---|
| 1 | V11 | V1 | V12 | V2 | V31 | V32 |
| 2 | V13 | V3 | V12 | V2 | ||
| 3 | V13 | V3 | V14 | V4 | ||
| 4 | V15 | V5 | V14 | V4 | ||
| 5 | V15 | V5 | V16 | V6 | ||
| 6 | V17 | V7 | V16 | V6 | ||
| 7 | V17 | V7 | V18 | V8 | ||
| 8 | V19 | V9 | V18 | V8 | ||
| 9 | V19 | V9 | V20 | V10 | ||
| 10 | V11 | V1 | V20 | V10 |
| Vector/Switch | S7 | S9 | S11 | S13 | S15 |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 0 | 0 | 1 |
| 2 | 1 | 1 | 0 | 0 | 0 |
| 3 | 1 | 1 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 | 0 |
| 5 | 0 | 1 | 1 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 | 0 |
| 7 | 0 | 0 | 1 | 1 | 1 |
| 8 | 0 | 0 | 0 | 1 | 1 |
| 9 | 1 | 0 | 0 | 1 | 1 |
| 10 | 1 | 0 | 0 | 0 | 1 |
| 11 | 1 | 0 | 0 | 0 | 0 |
| 12 | 1 | 1 | 1 | 0 | 1 |
| 13 | 0 | 1 | 0 | 0 | 0 |
| 14 | 1 | 1 | 1 | 1 | 0 |
| 15 | 0 | 0 | 1 | 0 | 0 |
| 16 | 0 | 1 | 1 | 1 | 1 |
| 17 | 0 | 0 | 0 | 1 | 0 |
| 18 | 1 | 0 | 1 | 1 | 1 |
| 19 | 0 | 0 | 0 | 0 | 1 |
| 20 | 1 | 1 | 0 | 1 | 1 |
| 31 | 0 | 0 | 0 | 0 | 0 |
| 32 | 1 | 1 | 1 | 1 | 1 |
| Category | Available on FPGA | Used by the Algorithm |
|---|---|---|
| Logic Cells | 1280 | 325 |
| PLBs | 160 | 81 |
| I/Os | 72 | 55 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Praženica, M.; Resutík, P.; Kaščák, S. Practical Implementation of the Indirect Control to the Direct 3 × 5 Matrix Converter Using DSP and Low-Cost FPGA. Sensors 2023, 23, 3581. https://doi.org/10.3390/s23073581
Praženica M, Resutík P, Kaščák S. Practical Implementation of the Indirect Control to the Direct 3 × 5 Matrix Converter Using DSP and Low-Cost FPGA. Sensors. 2023; 23(7):3581. https://doi.org/10.3390/s23073581
Chicago/Turabian StylePraženica, Michal, Patrik Resutík, and Slavomír Kaščák. 2023. "Practical Implementation of the Indirect Control to the Direct 3 × 5 Matrix Converter Using DSP and Low-Cost FPGA" Sensors 23, no. 7: 3581. https://doi.org/10.3390/s23073581