
Sensitivity Analysis of RV Reducer Rotation Error Based on Deep Gaussian Processes

Abstract
:1. Introduction
2. Analysis of the Factors Influencing the Rotation Error of RV-40E Reducer
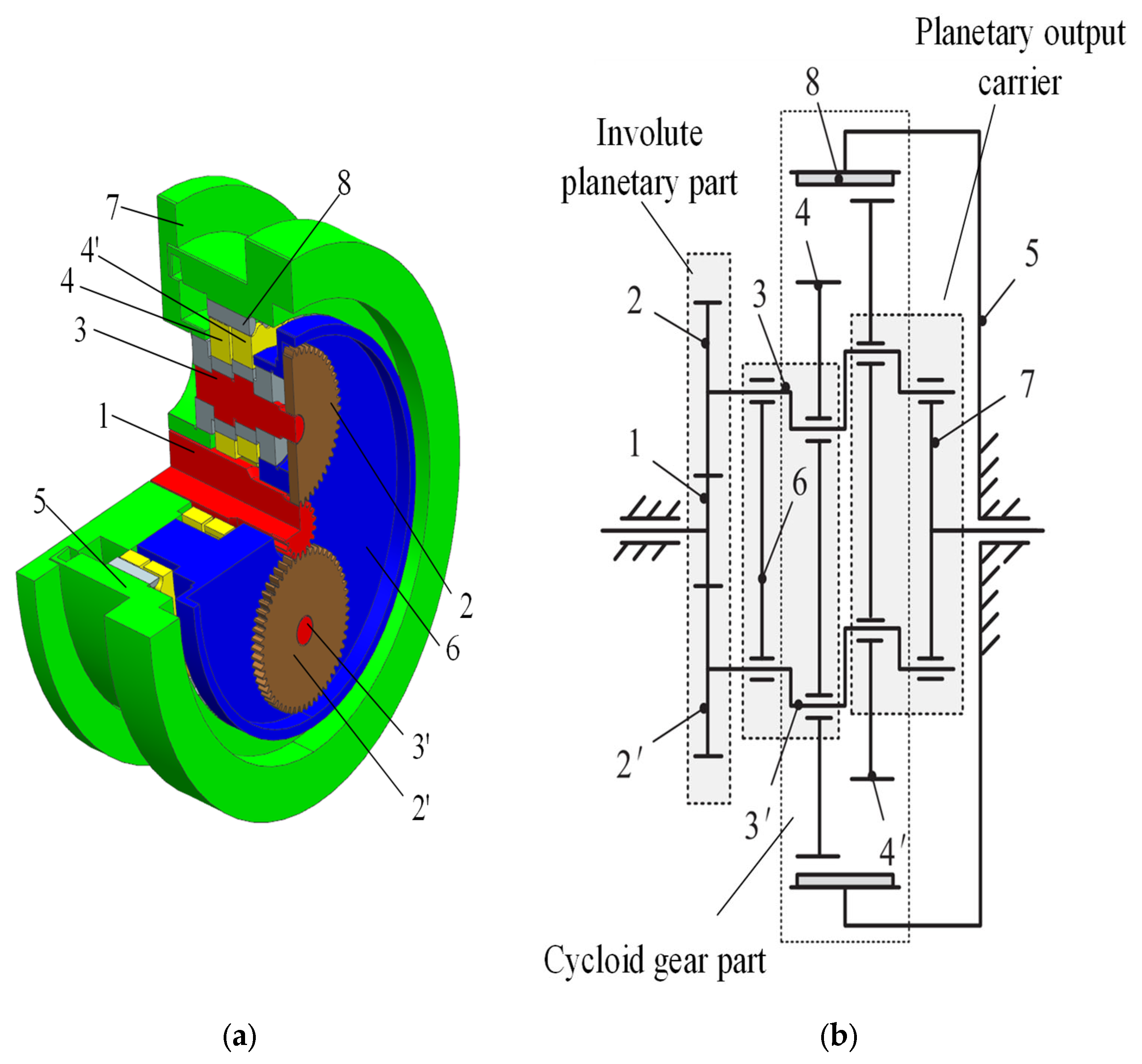
2.1. RV Reducer Transmission Principle and Structural Composition Analysis
2.2. Analysis of Factors Influencing the Rotation Error of RV Reducer
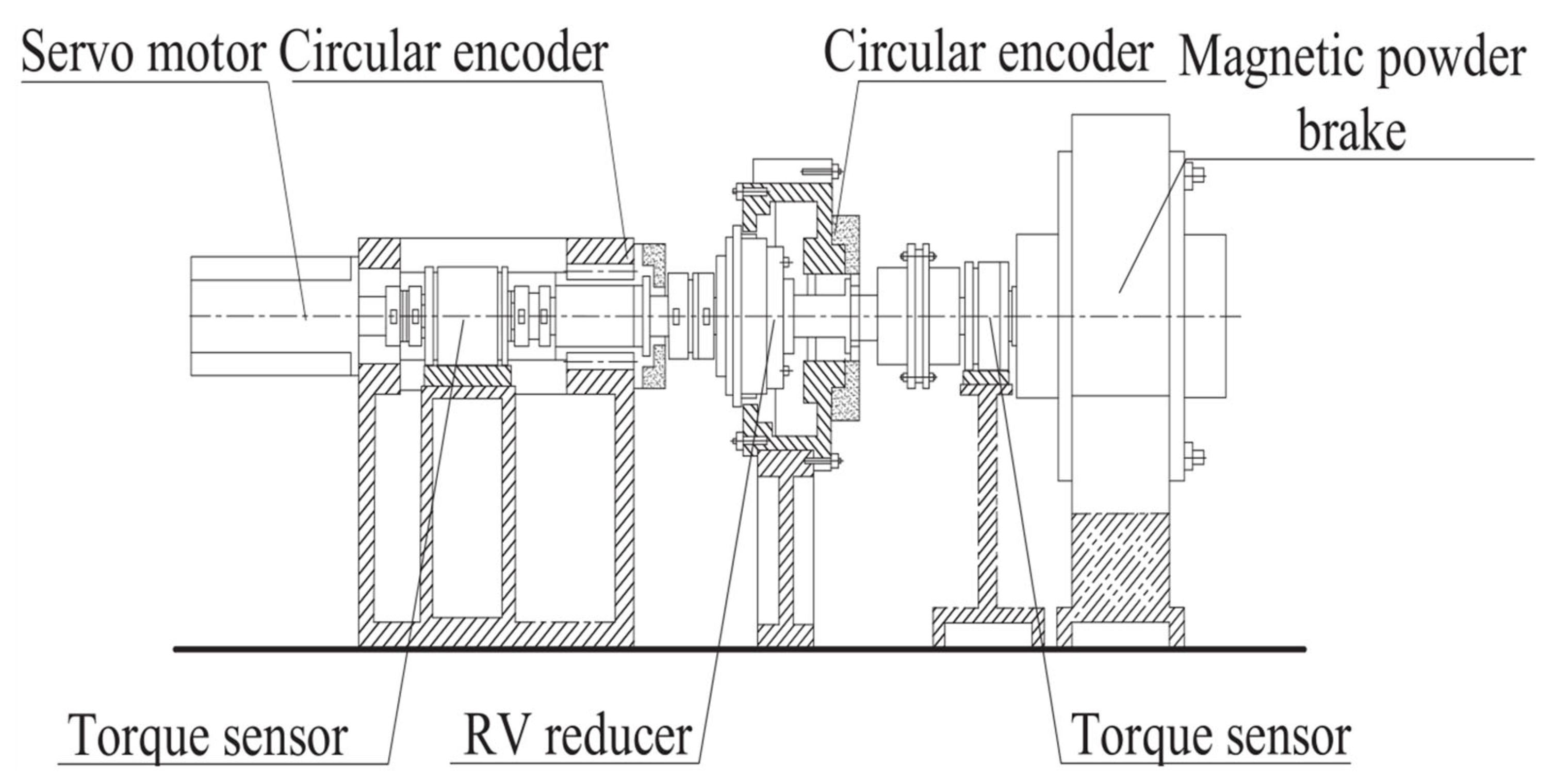
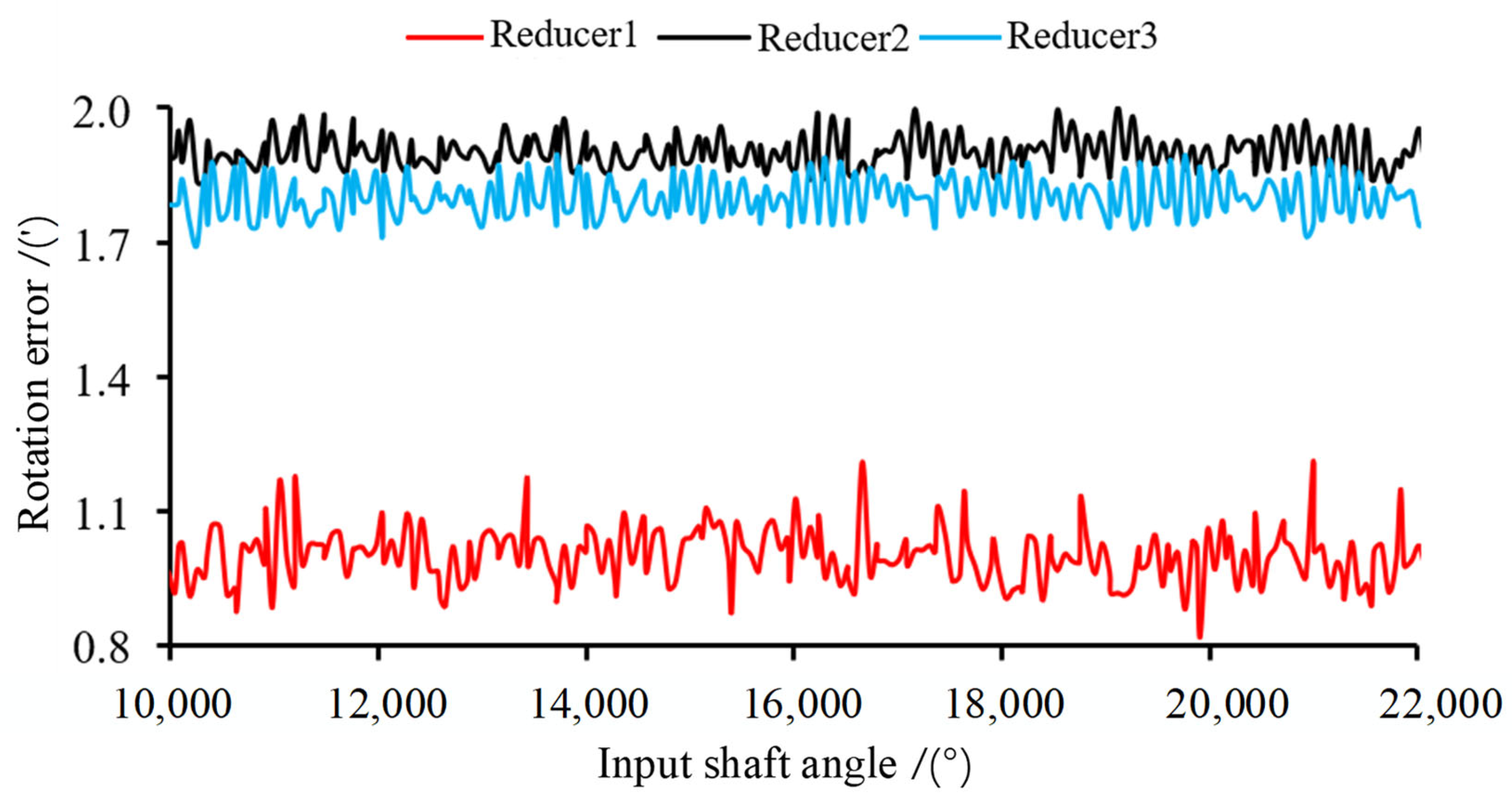
2.3. RV Reducer Rotation Error Sample Data Acquisition
3. Construction of Prediction Model of RV Reducer Rotation Error Based on the DeepGP Model
- Determine the range of values for each rotation error-influencing factor based on the actual production research, and then use the OLHS technique to collect the sample points for the prediction model’s training set.
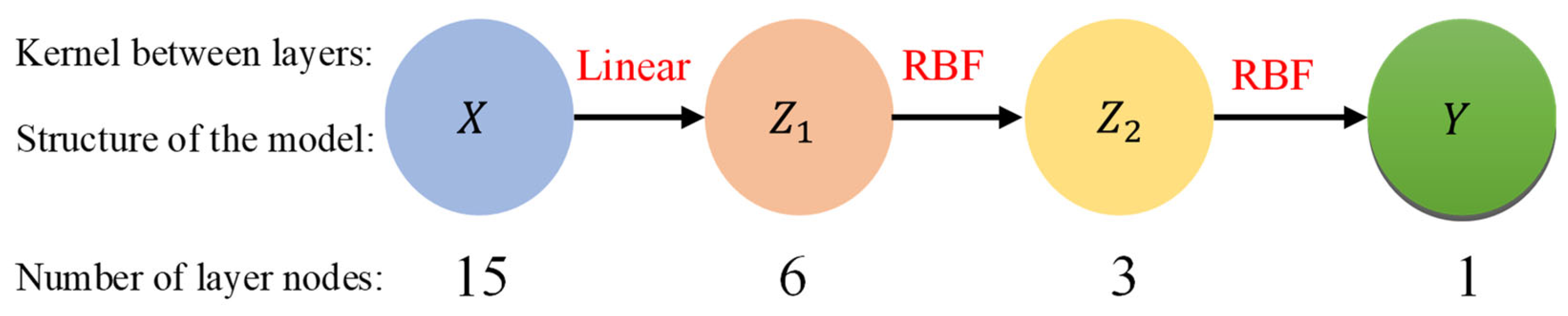
- Construct a rotation error prediction model using the DeepGP model and determining the structure and parameters of the model.
- Use a validation set to evaluate the prediction model’s accuracy in order to make it easier to conduct a sensitivity analysis of each individual influencing element in the following section.
3.1. Sample Point Extraction Based on the OLHS Method
- 1.
- Each dimensional axis is subdivided into 10 equal intervals, thereby dividing the sample space range into 1015 sub-regions with dimensions based on the 15 variables that affect the rotation error of the reducer, such as the .
- 2.
- Obtaining 200 sub-regions of an optimal Latin hypercube sampling matrix with uniform distribution based on the space-filling optimality criterion, space-filling optimality criterion is shown in the following equation:
- 3.
- Following that, a sample point is selected within each of the extracted sub-regions and each parameter sampling, point is then used as the coordinate component of each dimension of the sampling point.
3.2. Process of Building Rotation Error Prediction Model
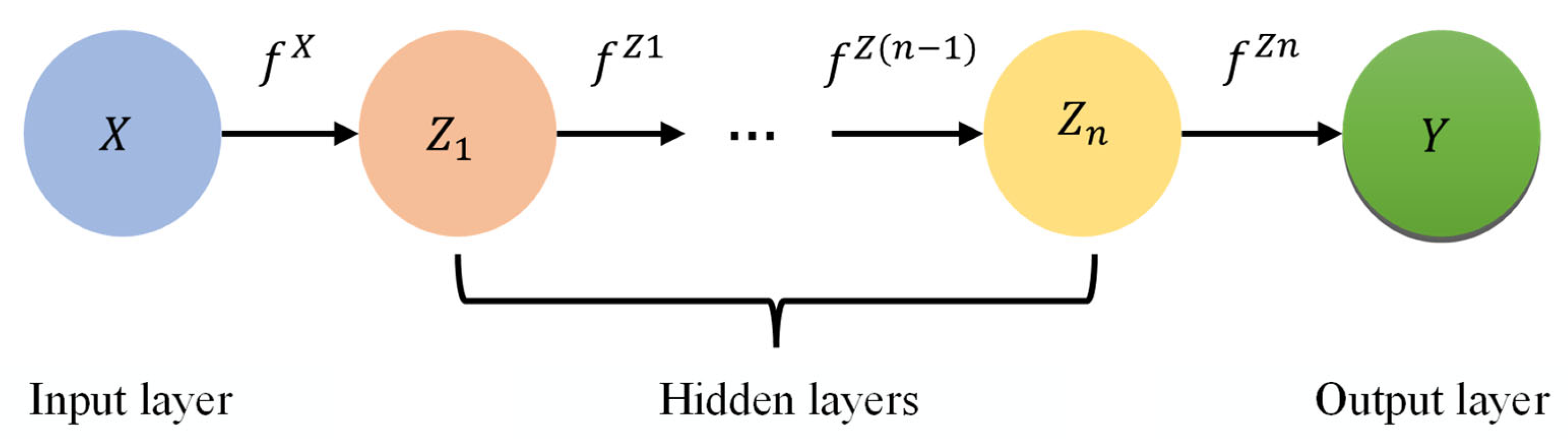
3.2.1. Deep Gaussian Processes Model
3.2.2. Construction of RV Reducer Rotation Error Prediction Model
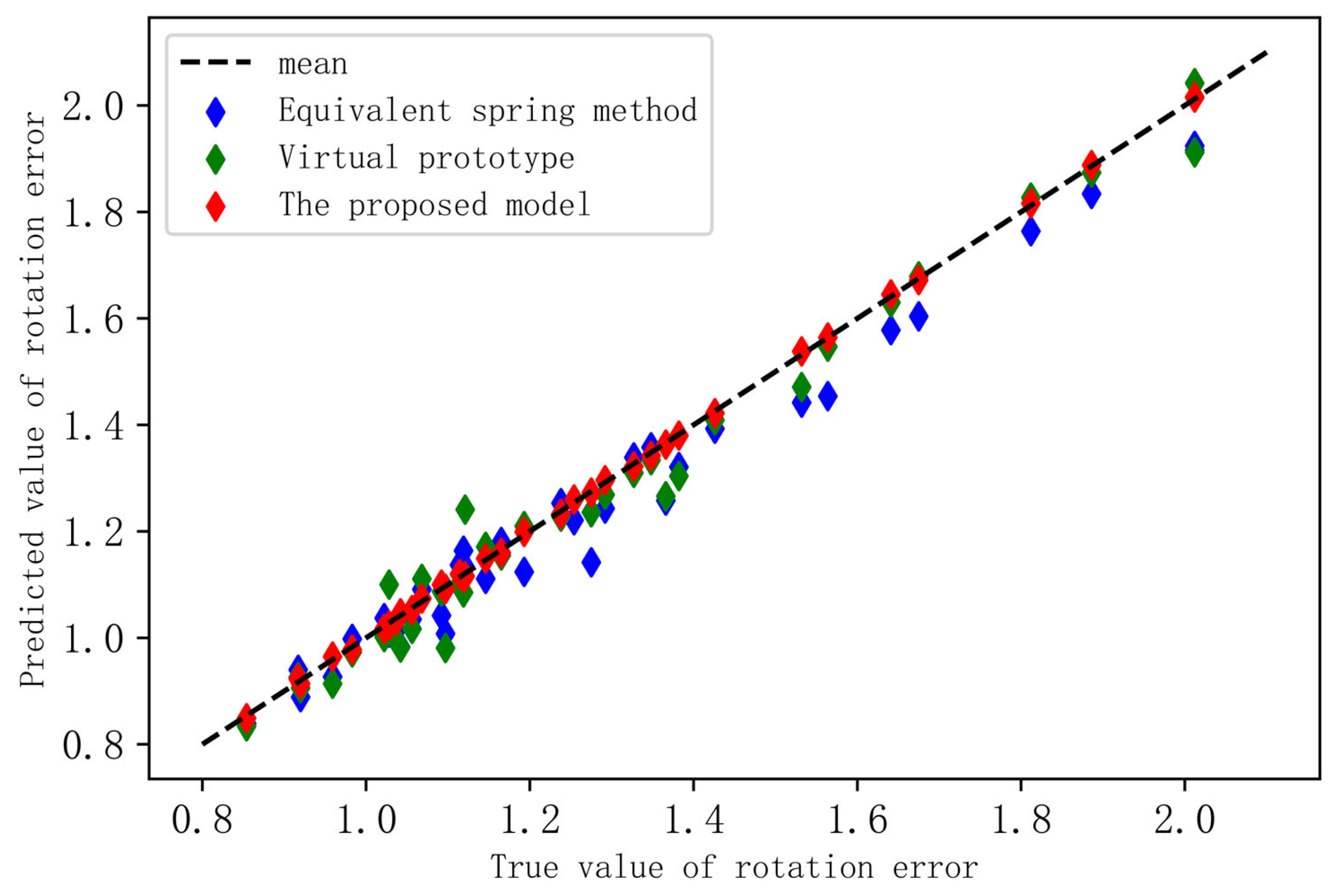
3.2.3. Accuracy Check of Rotation Error Prediction Model
4. Sensitivity Analysis of Factors Influencing the Rotation Error of RV Reducers Based on Sobol Method
4.1. Sobol Sensitivity Analysis Method
4.2. Sensitivity Analysis Process for Rotation Error Influencing Factors Based Sobol Method
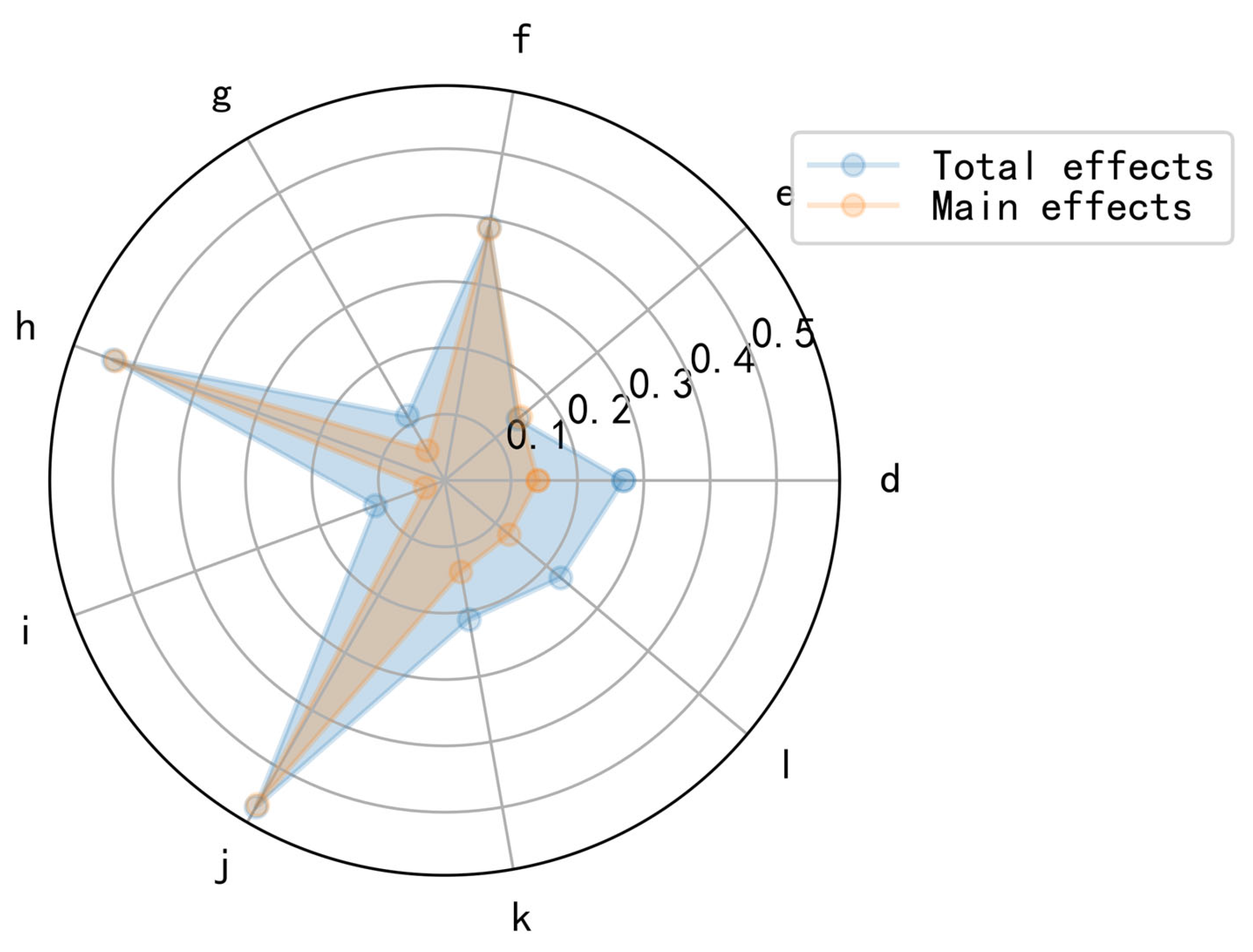
4.2.1. Results of Total Effects of Factors Influencing the Rotation Error of RV Reducer
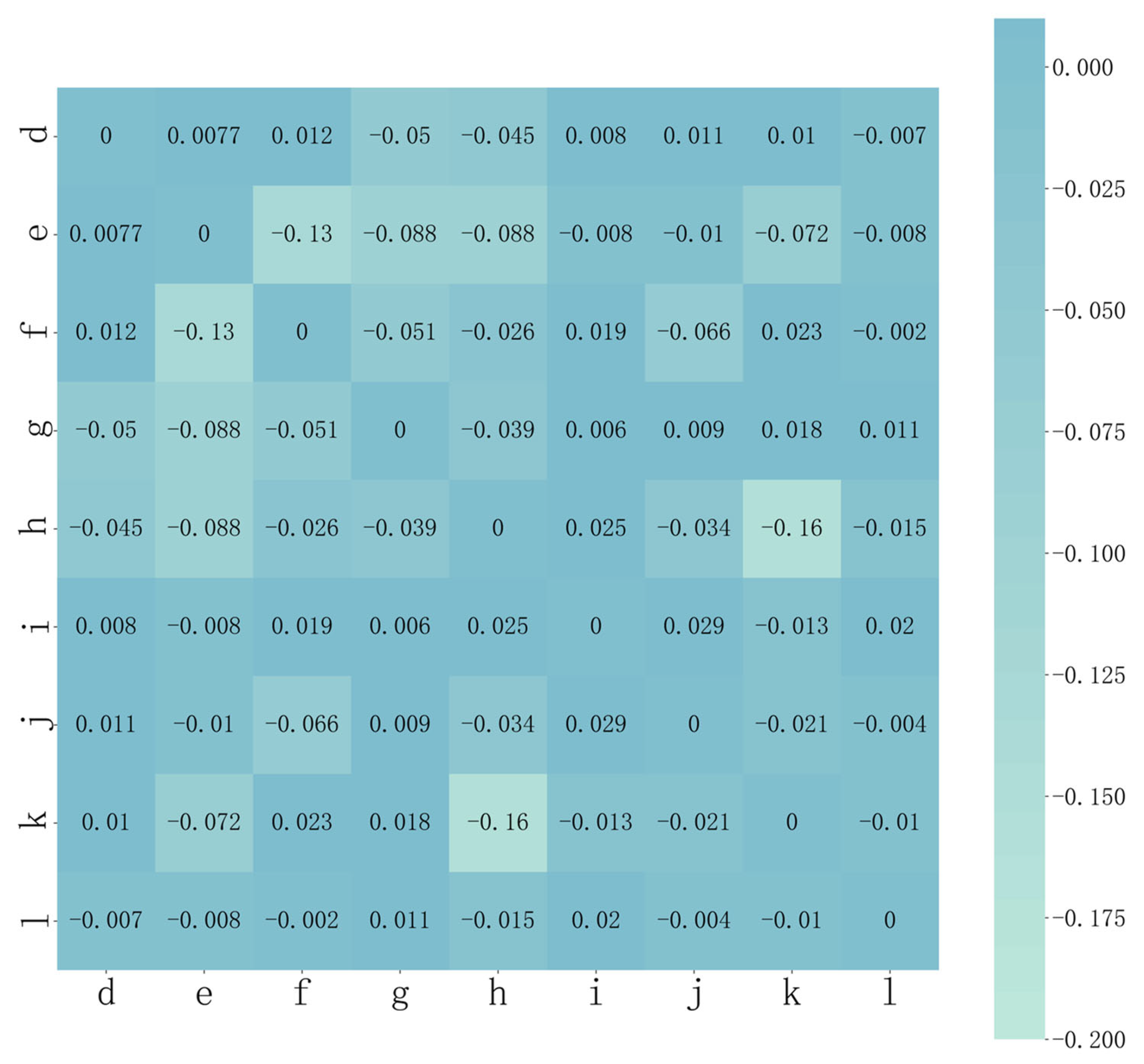
4.2.2. Analysis of the Coupling Effect of Factors Influencing the Rotation Error of RV Reducer
4.2.3. Comparison of Sensitivity Analysis Results
5. Conclusions
- Using the OLHS method, actual production facilities were sampled to ensure the accuracy of the created prediction models, as well as the dependability and applicability of the SA results. Using the Deep GP model, a high-precision prediction model for the rotation error of each RV reducer was developed, and the accuracy was compared with the equivalent method and virtual prototypes to demonstrate the validity and accuracy of the prediction model, thereby establishing the conditions for the sensitivity analysis of the RV reducer’s rotation error.
- On the basis of the prediction model, a global sensitivity analysis of the variables affecting the rotation error of the RV reducer was conducted using the Sobol method. The primary cause of the reducer’s rotation error is the second-stage cycloidal pin-wheel transmission mechanism, with the influence of the planetary gear transmission and the planetary output carrier being small and negligible.
- The second-order sensitivity index is used to evaluate how multiple influencing elements interact to affect the rotation error of the reducer. There is significantly more coupling between and , as well as between and . The coupling effect between other variables has little effect on the rotation error. The total order sensitivity index of each factor is calculated by adding its main effects and the coupling of those effects to other influences. The results of this paper’s sensitivity analysis were contrasted with the results of Taylor’s midvalue theorem to confirm the originality and precision of the analysis results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, W.D.; Shan, L.J. Status and Development of RV Reduce. J. Dalian Jiaotong Univ. 2016, 37, 13–18. [Google Scholar]
- Pham, A.D.; Ahn, H.J. High Precision Reducers for Industrial Robots Driving 4th Industrial Revolution: State of Arts, Analysis, Design, Performance Evaluation and Perspective. Int. J. Precis. Eng. Manuf. Green Technol. 2018, 5, 519–533. [Google Scholar] [CrossRef]
- Yang, Y.H.; Zhou, G.C.; Chang, L.; Chen, G. A Modelling Approach for Kinematic Equivalent Mechanism and Rotational Transmission Error of RV Reducer. Mech. Mach. Theory 2021, 163, 104384. [Google Scholar] [CrossRef]
- Hidaka, T.; Wang, H.Y.; Ishida, T.; Matsumoto, K.; Hashimoto, M. Rotational Transmission Error of K-H-V Planetary Gears with Cycloid Gear (1st Report, Analytical Method of the Rotational Transmission Error). JSME Int. J. C-Mech. Syst. 1994, 60, 645–653. [Google Scholar]
- Ishida, T.; Wang, H.Y.; Hidaka, T.; Matsumoto, K.; Hashimoto, M. Rotational Transmission Error of K-H-V Planetary Gears with Cycloid Gear (2nd Report, Effects of Manufacturing and Assembly Errors on Rotational Transmission Error). JSME Int. J. C-Mech. Syst. 1994, 60, 278–285. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.Y.; Ishida, T.; Hidaka, T.; Matsumoto, K.; Hashimoto, M. Rotational Transmission Error of K-H-V Planetary Gears with Cycloid Gear (3rd report, Mutual Effects of Errors of the Elements on the Rotational Transmission Error). JSME Int. J. C-Mech. Syst. 1994, 60, 286–293. [Google Scholar] [CrossRef] [Green Version]
- He, W.D.; Shan, L.J. Research and Analysis on Transmission Error of RV Reducer Used in Robot. In Recent Advances in Mechanism Design for Robotics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 231–238. [Google Scholar]
- Cao, K.; Shao, G.; Liu, T. Equivalent Error Modeling and Parameter Optimization of RV Reducer. J. Xiamen Univ. Nat. Sci. 2022, 61, 246–252. [Google Scholar]
- Chu, X.Y.; Xu, H.H.; Wu, X.M.; Tao, J.P.; Shao, G.F. The Method of Selective Assembly for the RV Reducer Based on Genetic Algorithm. Proc. Inst. Mech. Eng. Part C-J. Mech. Eng. Sci. 2018, 232, 921–929. [Google Scholar] [CrossRef]
- Liu, K. Analysis and Evaluation of Transmission Accuracy of RV Reducer. Master’s Thesis, Xiamen University of Technology, Xiamen, China, 2022. [Google Scholar]
- Meng, Y.H.; Wu, C.L.; Ling, L.P. Mathematical Modeling of the Transmission Performance of 2k-H Pin Cycloid Planetary Mechanism. Mech. Mach. Theory 2007, 42, 776–790. [Google Scholar] [CrossRef]
- Liu, T.D.; Lu, M.; Shao, G.F.; Wang, R.Y. Modeling and Optimization of Rotate Vector Reducer Transmission Error. Control Theory Appl. 2020, 37, 215–221. [Google Scholar]
- Tong, X.T. Research on Dynamic Transmission Error of RV Reducer Based on Virtual Prototype Technology. Master’s Thesis, Zhejiang University of Technology, Hangzhou, China, 2019. [Google Scholar]
- Jin, S.S.; Cao, M.Y.; Qian, Q.C.; Zhang, G.; Wang, Y.L. Study on an Assembly Prediction Method of RV Reducer Based on Igwo Algorithm and Svr Model. Sensors 2023, 23, 366. [Google Scholar] [CrossRef]
- Hu, Y.H.; Li, G.; Zhu, W.D.; Cui, J.K. An Elastic Transmission Error Compensation Method for Rotary Vector Speed Reducers Based on Error Sensitivity Analysis. Appl. Sci. 2020, 10, 481. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; He, W. Transmission Accuracy Test and Virtual Prototype Simulation of the RV Reducer Used in the Robot. J. Mach. Des. 2017, 34, 73–77. [Google Scholar]
- Wen, B.C. Handbook of Mechanical Design; China Machine Press: Beijing, China, 2017; Volume 2, pp. 114–137. [Google Scholar]
- Yang, D.C.H.; Blanche, J.G. Design and Application Guidelines for Cycloid Drives with Machining Tolerances. Mech. Mach. Theory 1990, 25, 487–501. [Google Scholar] [CrossRef]
- Martin, J.D.; Simpson, T.W. Use of Kriging Models to Approximate Deterministic Computer Models. AIAA J. 2005, 43, 853–863. [Google Scholar] [CrossRef]
- Marrel, A.; Iooss, B.; Van Dorpe, F.; Volkova, E. An Efficient Methodology for Modeling Complex Computer Codes with Gaussian Processes. Comput. Stat. Data Anal. 2008, 52, 4731–4744. [Google Scholar] [CrossRef] [Green Version]
- Damianou, A.C.; Lawrence, N.D. Deep Gaussian Processes. J. Mach. Learn. Res. 2013, 31, 207–215. [Google Scholar]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 2000, 42, 55–61. [Google Scholar] [CrossRef]
- Lai, Y.Y.; Jiang, X.; Fang, L.Q.; Li, M.; Li, G.Q. Parametric Optimization Theory and Examples in Detail of Isight; Beihang University Press: Beijing, China, 2012; pp. 90–95. [Google Scholar]
- Hebbal, A.; Brevault, L.; Balesdent, M.; Talbi, E.; Melab, N.; IEEE. Efficient Global Optimization Using Deep Gaussian Processes. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 2625–2632. [Google Scholar]
- Damianou, A. Deep Gaussian Processes and Variational Propagation of Uncertainty. Ph.D. Thesis, University of Sheffield, Sheffield, UK, 2015. [Google Scholar]
- Calandra, R.; Peters, J.; Rasmussen, C.E.; Deisenroth, M.P.; Ieee. Manifold Gaussian Processes for Regression. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 3338–3345. [Google Scholar]
- Erickson, C.; Ankenman, B.E.; Sanchez, S.M.; Ieee. Comparison of Gaussian Process Modeling Software. In Proceedings of the 2016 Winter Simulation Conference (WSC), Washington, DC, USA, 11–14 December 2016; pp. 3692–3693. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Schaibly, J.H.; Shuler, K.E. Study of the Sensitivity of Coupled Reaction Systems to Uncertainties in Rate Coefficients. II Applications. J. Chem. Phys. 1973, 59, 3879–3887. [Google Scholar] [CrossRef]
- Campolongo, F.; Cariboni, J.; Saltelli, A. An effective screening design for sensitivity analysis of large models. Environ. Model. Softw. 2007, 22, 1509–1518. [Google Scholar] [CrossRef]
- Griensven, A.G.; Meixner, T.; Grunwald, S.; Bishop, T.; Diluzio, M.; Srinivasan, R. A global sensitivity analysis tool for the parameters of multi-variable catchment models. J. Hydrol. 2006, 324, 10–23. [Google Scholar] [CrossRef]
- Beven, K.; Binley, A. The future of distributed models: Model calibration and uncertainty prediction. Hydrol. Process. 1992, 6, 279–298. [Google Scholar] [CrossRef]
- Zhang, M.X.F.; Pandey, M.D. An Effective Approximation for Variance-Based Global Sensitivity Analysis. Reliab. Eng. Syst. Saf. 2014, 121, 164–174. [Google Scholar] [CrossRef]
- Zhai, Q.Q.; Yang, J.; Zhao, Y. Space-Partition Method for the Variance-Based Sensitivity Analysis: Optimal Partition Scheme and Comparative Study. Reliab. Eng. Syst. Saf. 2014, 131, 66–82. [Google Scholar] [CrossRef]
- Wang, X.L. Development of RV Reducer Performance Tester. Master’s Thesis, Beijing University of Technology, Beijing, China, 2015. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of teeth of sun gear and planetary gear | 18/54 |
| Number of teeth of cycloid gear (zc) and needle gear | 39/40 |
| Eccentricity of crankshaft (a) (mm) | 1.5 |
| Circle center radius of needle tooth shell (δrp) (mm) | 82 |
| Radius of needle gear (δrrp) (mm) | 4 |
| Total transmission ratio (i) | 121 |
| Short amplitude factor (k1) | 0.73 |
| Input power | 1.05 (kW) |
| Nominal torque | 377 (N∙m) |
| Sources of Influencing Factors | No. | Influencing Factor of Rotation Error | Code Name | The Range/mm |
|---|---|---|---|---|
| The primary involute planetary part | 1 | Center distance error of input shaft and planetary gear | 0.15~0.50 | |
| 2 | Radial error between gear and ring | 0.20~0.30 | ||
| 3 | Fit clearance of gear and shaft | 0.001~0.003 | ||
| The second stage cycloidal pinwheel part | 4 | Amount of equidistant modification of cycloid gear | 0.016~0.048 | |
| 5 | The amount of radial-moving modification of cycloid gear | 0.026~0.078 | ||
| 6 | Clearance of inside hole of cycloid gear and slewing bearing | 0~0.01 | ||
| 7 | Radius error of needle tooth center circle | 0.005~0.015 | ||
| 8 | Needle gear radius error | 0.01~0.03 | ||
| 9 | Matching clearance between the pin gear and needle gear hole | 0.001~0.003 | ||
| 10 | Circular position error of the needle gear hole | 0~0.01 | ||
| 11 | Eccentricity error of crankshaft | 0.01~0.03 | ||
| 12 | Clearance of crankshaft and slewing bearing | 0~0.002 | ||
| Planetary output carrier | 13 | Eccentricity error of planet carrier | 0.005~0.015 | |
| 14 | Carrier wheel crankshaft center distance error | 0~0.01 | ||
| 15 | Bearing hole phase error of planet carrier | 0.03~0.05 |
| Sample Point | Rotation Error/’ | |
|---|---|---|
| Kernel Function | Expression |
|---|---|
| The Linear kernel | |
| The absolute-exponential kernel (RBF) | |
| The absolute-exponential kernel | |
| The Periodic covariance kernel function (PER) |
| Performance Metrics | Validation Set 1 | Validation Set 2 |
|---|---|---|
| MAPE | 0.05533 | 0.07584 |
| R2 | 0.97871 | 0.95913 |
| MAE | 0.06059 | 0.07085 |
| RMSE | 0.07053 | 0.08143 |
| Performance Metrics | The Proposed Method | Equivalent Spring Method | Virtual Prototype |
|---|---|---|---|
| MAPE | 0.06533 | 0.17326 | 0.20461 |
| R2 | 0.96846 | 0.78542 | 0.76941 |
| MAE | 0.08059 | 0.13212 | 0.12941 |
| RMSE | 0.07053 | 0.16819 | 0.20851 |
| Sensitivity Analysis Methods | Characteristics of Sensitivity Methods | |
|---|---|---|
| Local sensitivity analysis | FAST | Simple operation, ignores parameter interactions, low model applicability. |
| Global sensitivity analysis | Morris | Compared the output results of adjacent parameters in the parameter space, inefficient. |
| LH-OAT | Although the benefits of both the random one-factor-at-a-time and LHS sampling techniques are taken into account, the computer program is complex. | |
| GLUE | Combining the benefits of Rivest-Shamir-Adleman techniques and fuzzy mathematics to rank sensitivities as scatter plots. | |
| Sobol | The sensitivity indices are solved using the Monte Carlo sampling technique, which can distinguish independently between parameter-independent and parameter-interacting sensitivities. | |
| Label | Influencing Factor of Rotation Error | Total Effects |
|---|---|---|
| a | 0.012414 | |
| b | 0.025427 | |
| c | 0.007129 | |
| d | 0.269588 | |
| e | 0.144105 | |
| f | 0.387645 | |
| g | 0.112615 | |
| h | 0.531029 | |
| i | 0.111341 | |
| j | 0.568193 | |
| k | 0.021295 | |
| l | 0.228339 | |
| m | 0.014437 | |
| n | 0.012762 | |
| o | 0.009721 |
| Infuencing Factor of Ratation Error | Taylor Sensitivity Method | Sobol | ||
|---|---|---|---|---|
| Rotation Error Caused by Each Factor | Sensitivity Coefficient | Sensitivity Index | Total Effects | |
| - | 0.025 | 0.0124 | ||
| - | 0.025 | 0.0254 | ||
| 1 | 1 | 0.269588 | ||
| 0.68 | 0.144105 | |||
| 0.68 | 0.112615 | |||
| 1 | 0.5312 | |||
| 0.5 | 0.5 | 0.1111 | ||
| 0.73 | 0.56819 | |||
| 0.679487 | 0.228339 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, S.; Shang, S.; Jiang, S.; Cao, M.; Wang, Y. Sensitivity Analysis of RV Reducer Rotation Error Based on Deep Gaussian Processes. Sensors 2023, 23, 3579. https://doi.org/10.3390/s23073579
Jin S, Shang S, Jiang S, Cao M, Wang Y. Sensitivity Analysis of RV Reducer Rotation Error Based on Deep Gaussian Processes. Sensors. 2023; 23(7):3579. https://doi.org/10.3390/s23073579
Chicago/Turabian StyleJin, Shousong, Shulong Shang, Suqi Jiang, Mengyi Cao, and Yaliang Wang. 2023. "Sensitivity Analysis of RV Reducer Rotation Error Based on Deep Gaussian Processes" Sensors 23, no. 7: 3579. https://doi.org/10.3390/s23073579