

UAV-Based Wildland Fire Air Toxics Data Collection and Analysis
 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
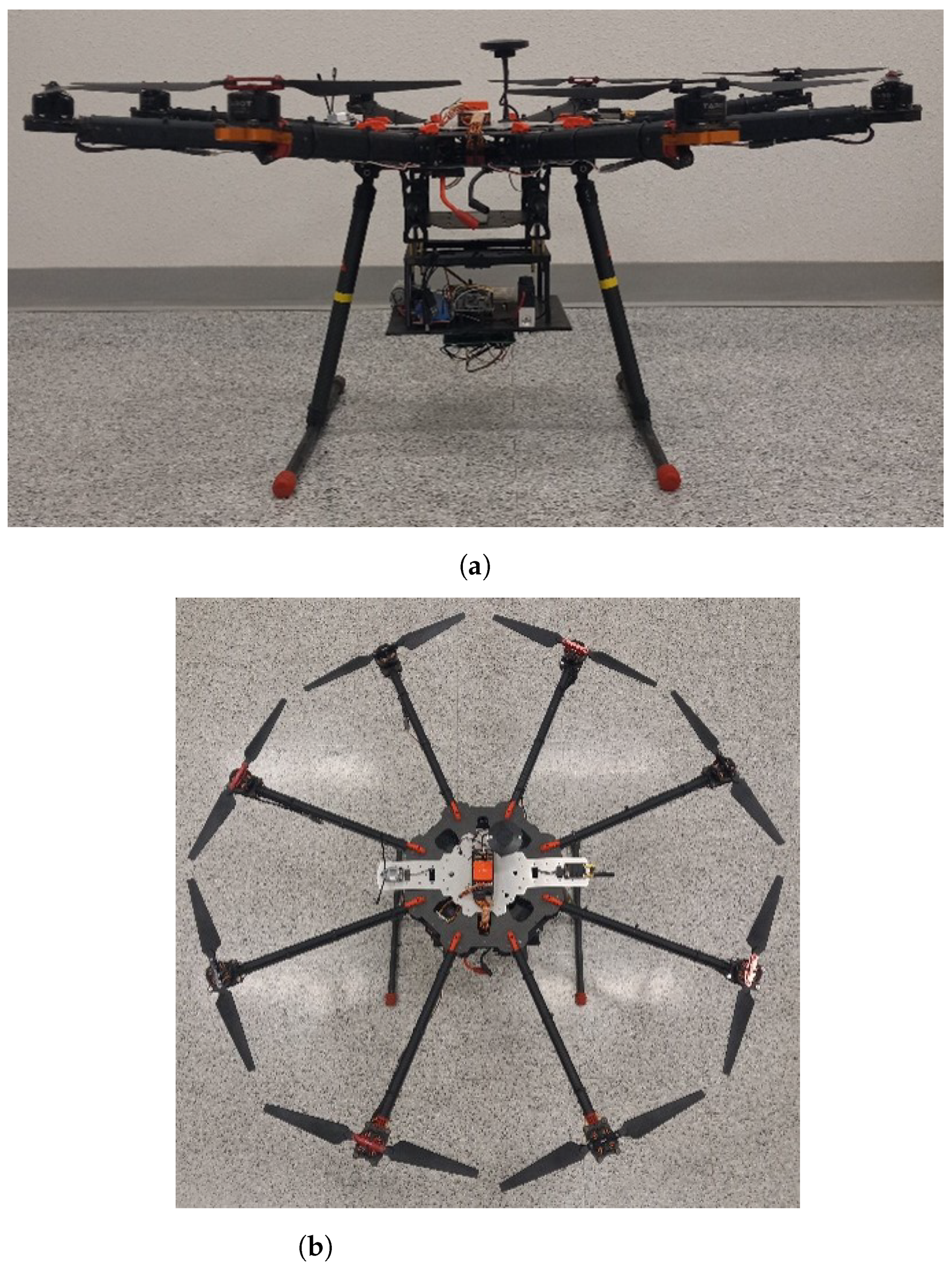
2.1. UAV Platform
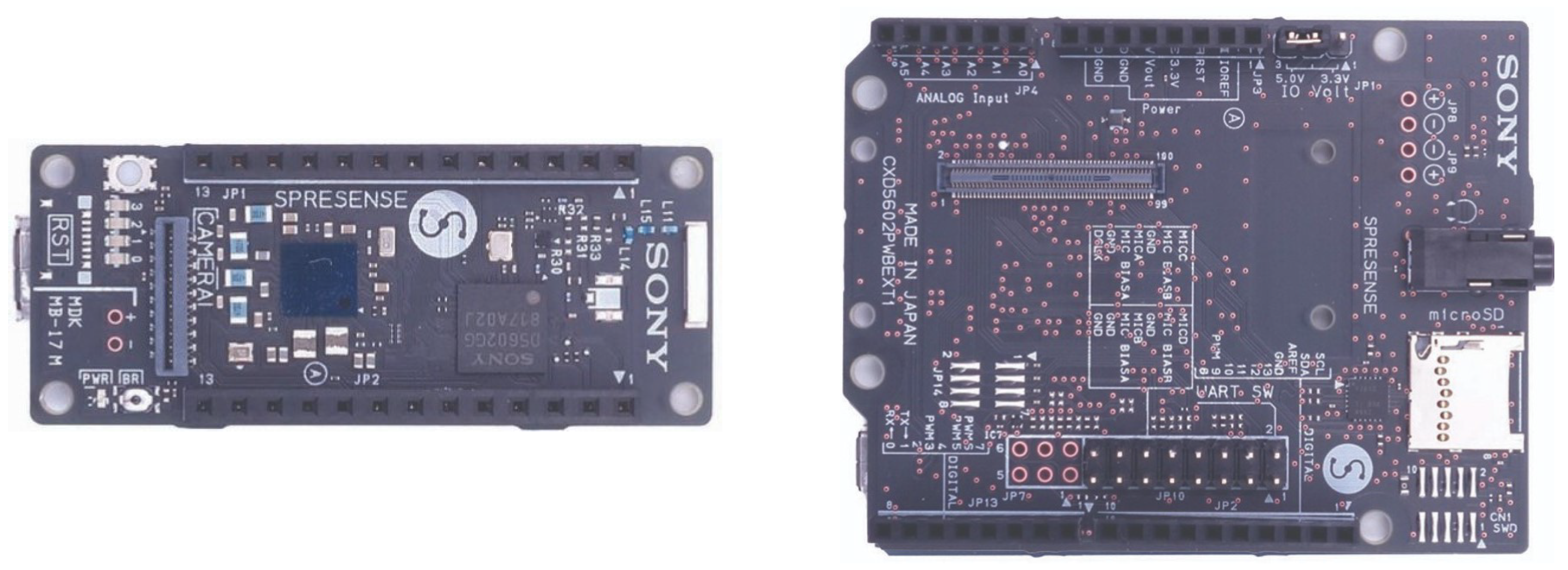
2.2. Microcontroller
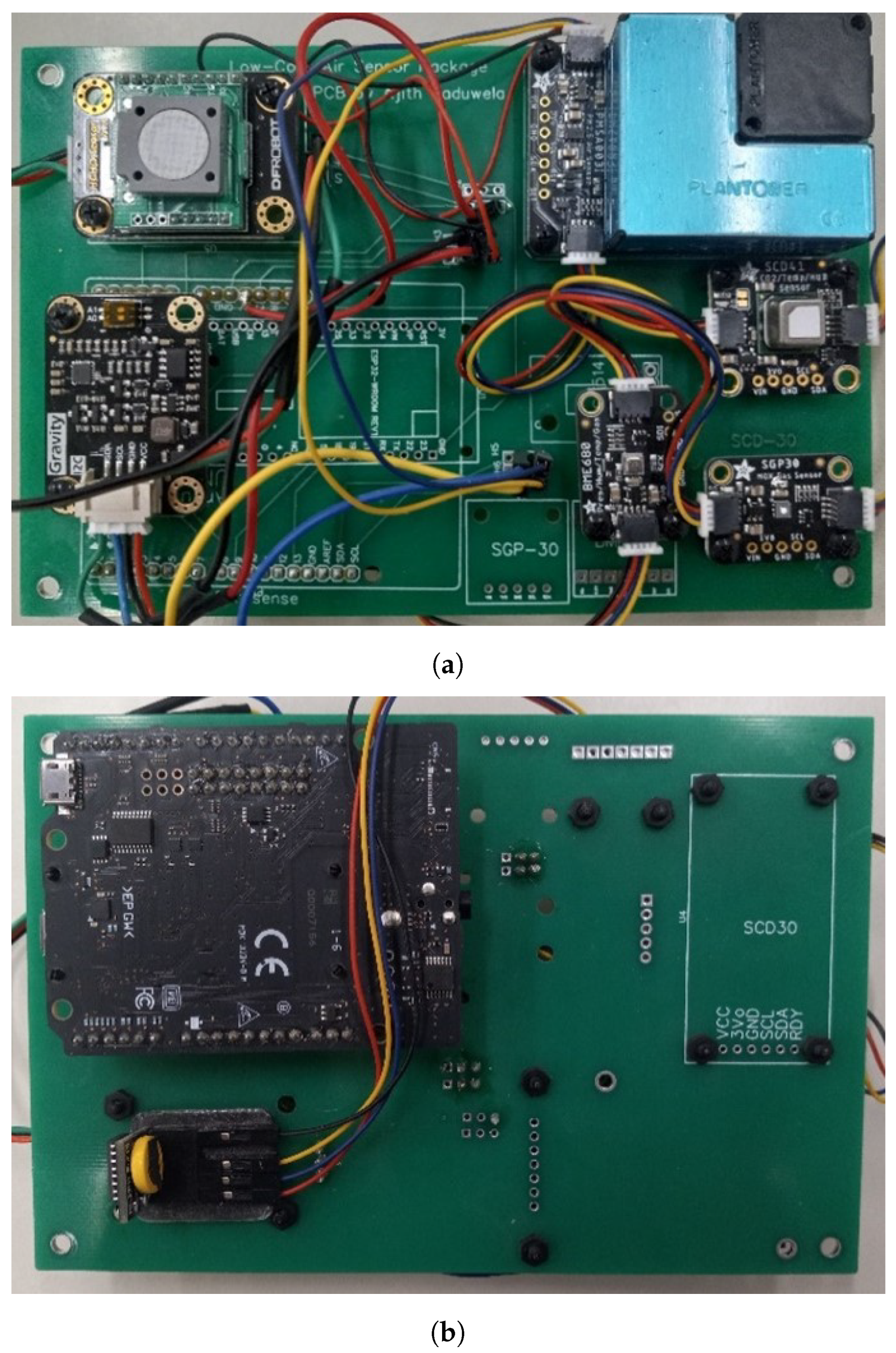
2.3. Air Quality Sensor Package
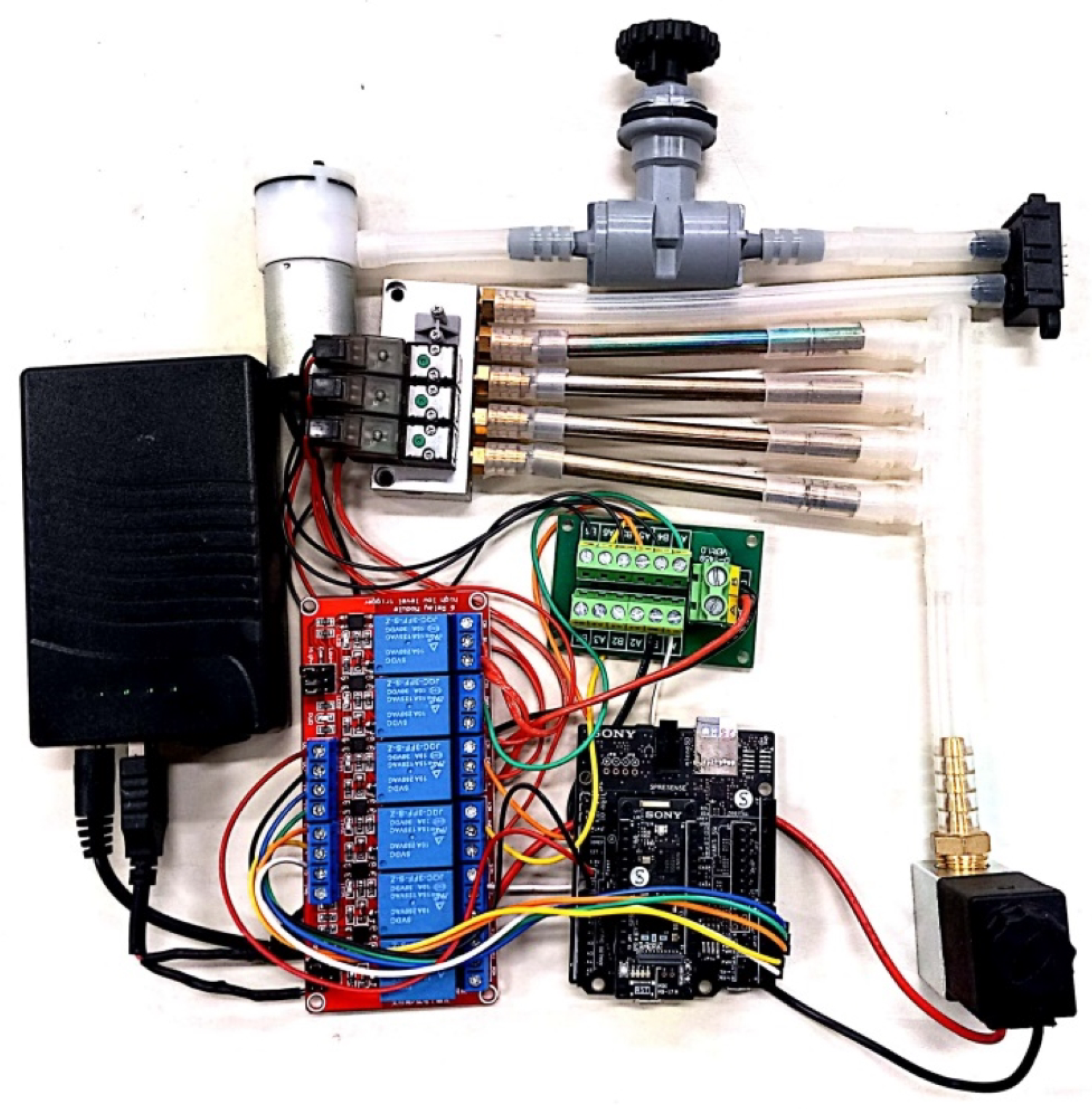
2.4. VOC Air Sampler
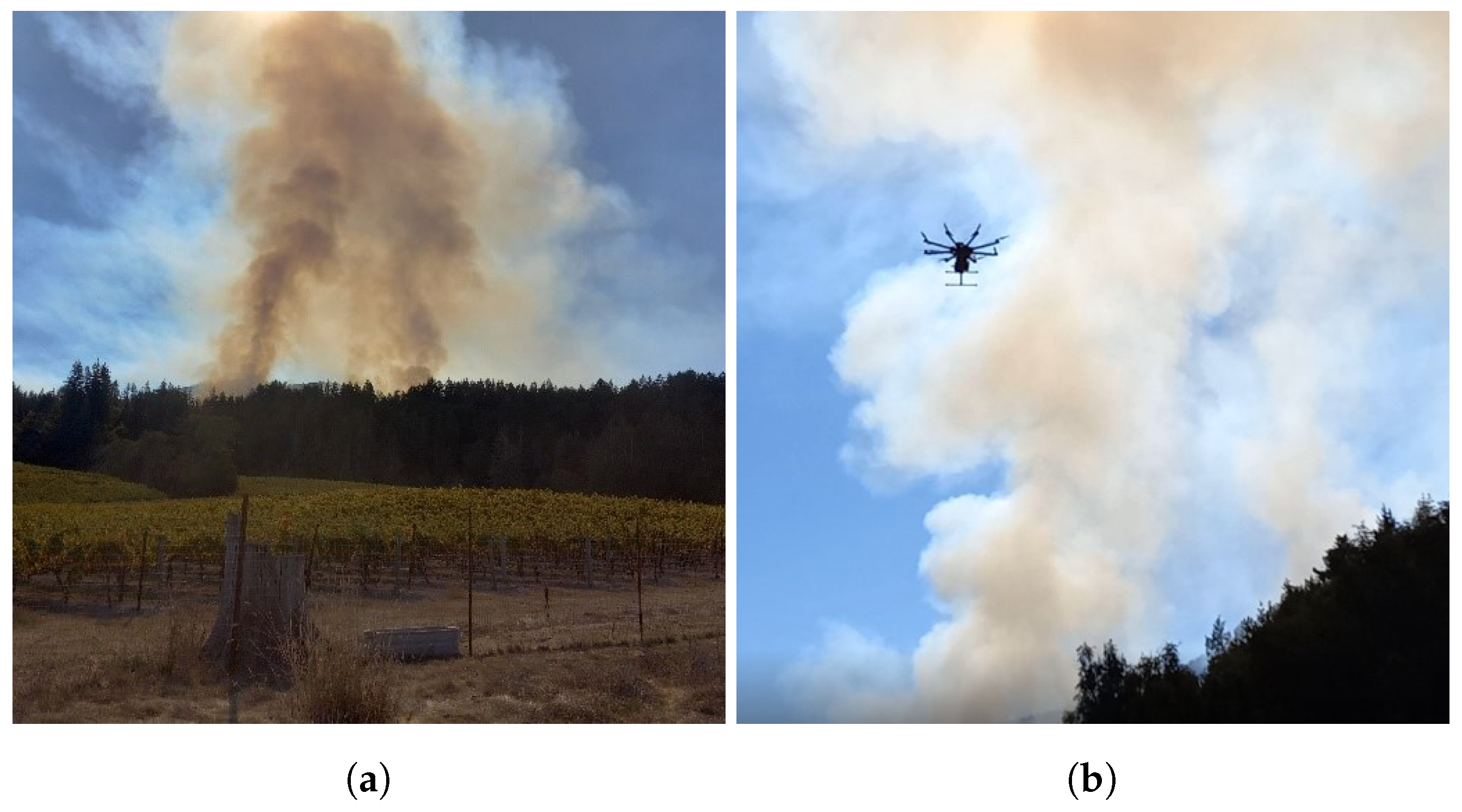
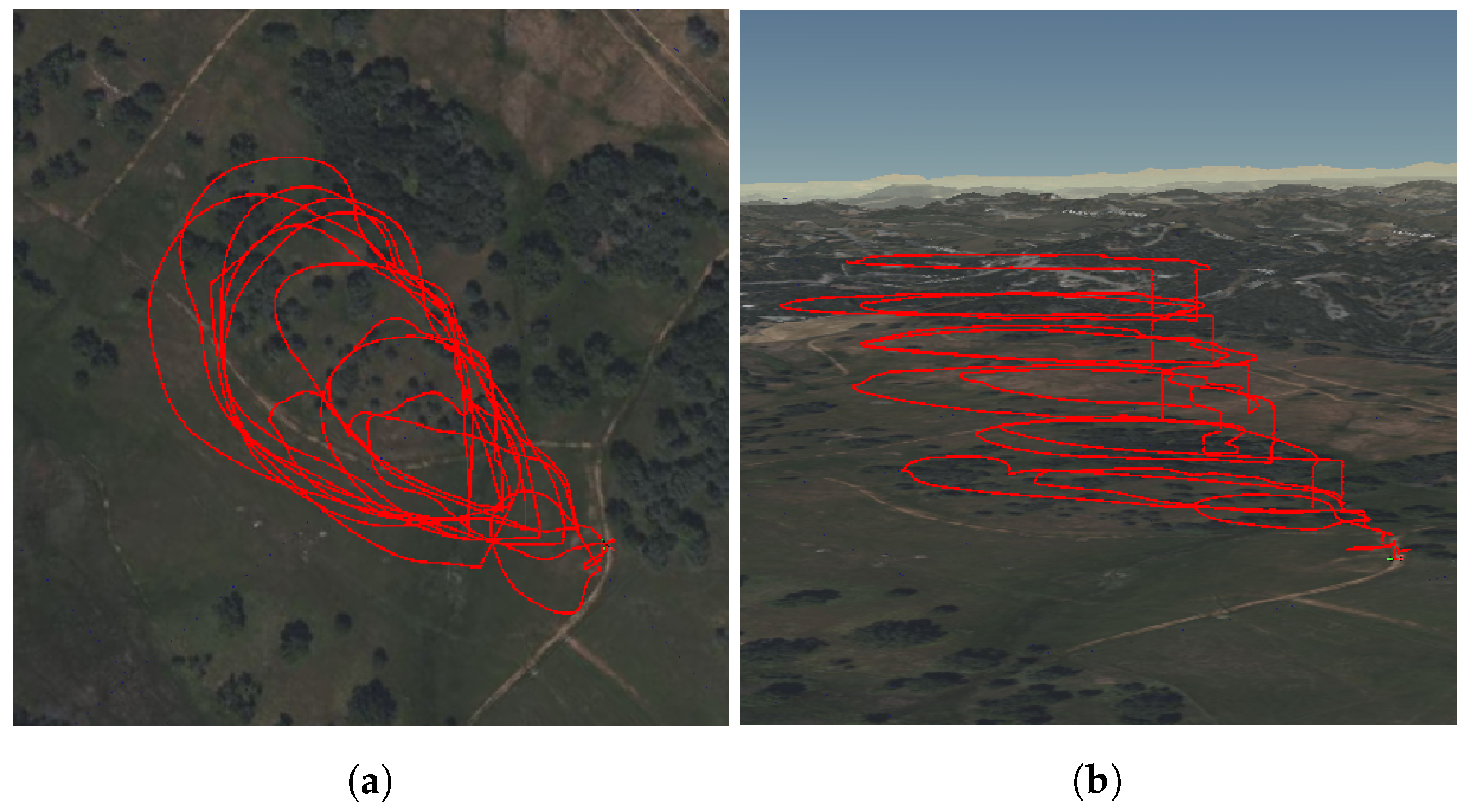
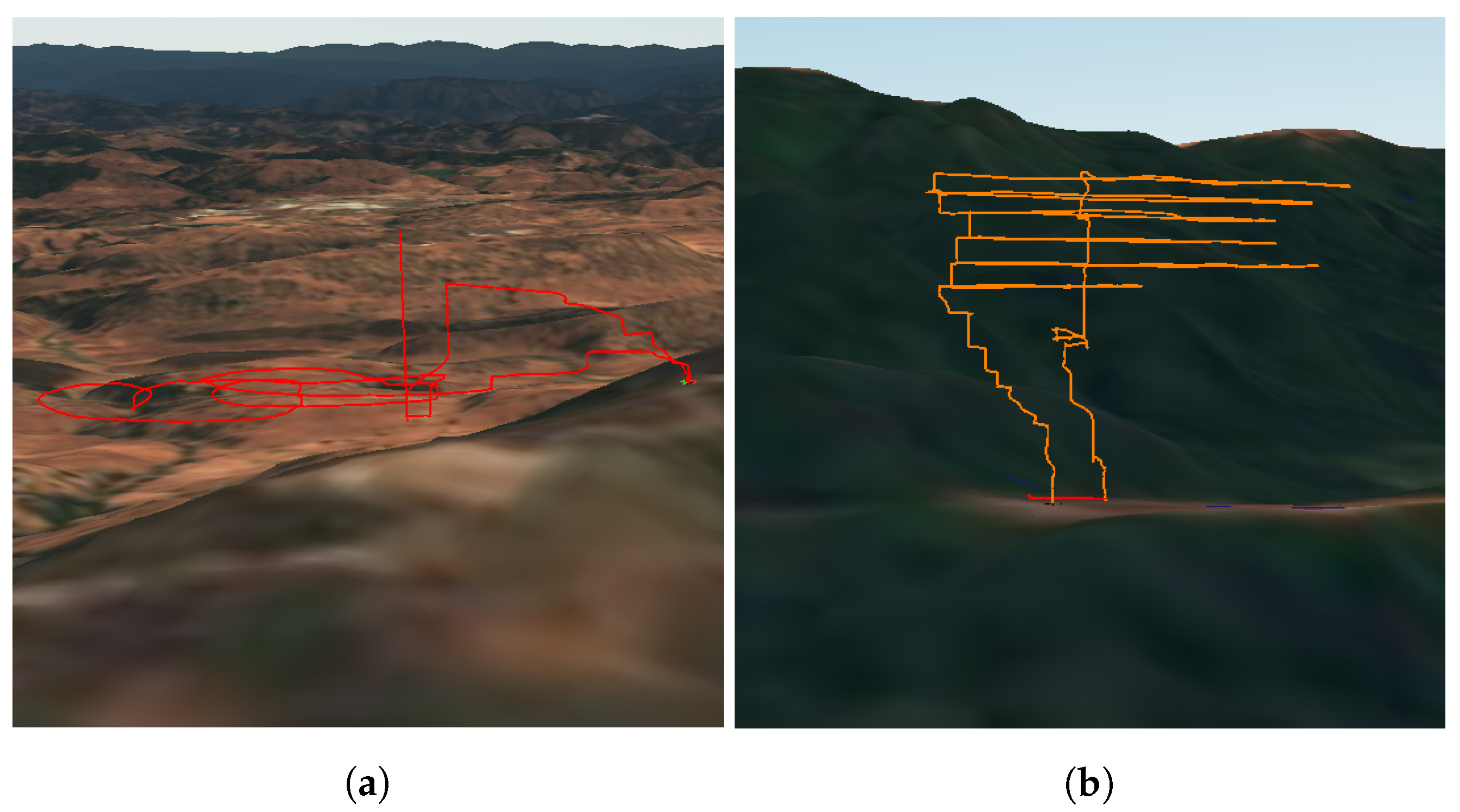
2.5. Prescribed Fire Experiments
2.5.1. Pilot Hill
2.5.2. Angels Camp
2.5.3. Jack London
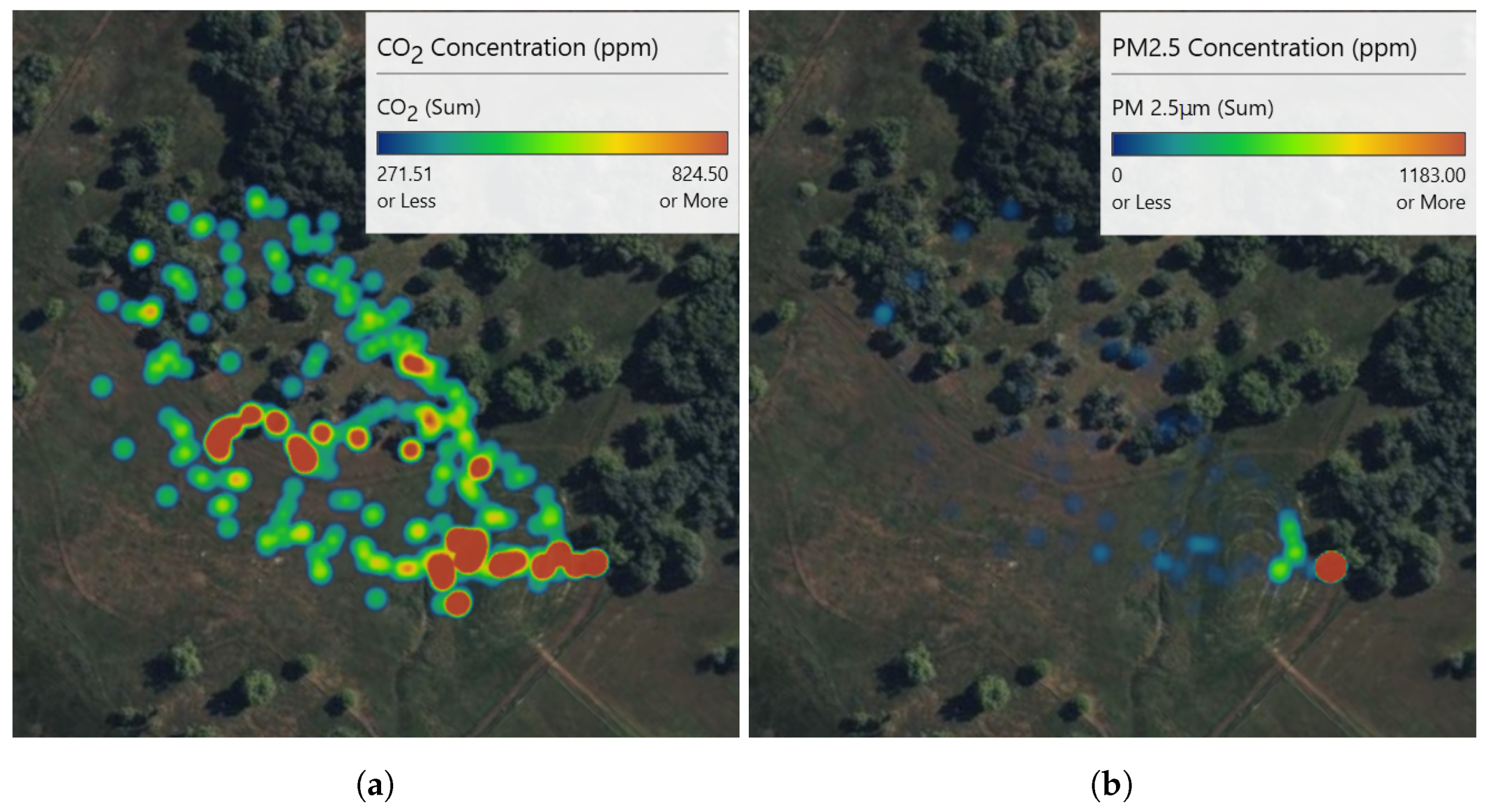
3. Results
3.1. Air Quality Sensor Package Results
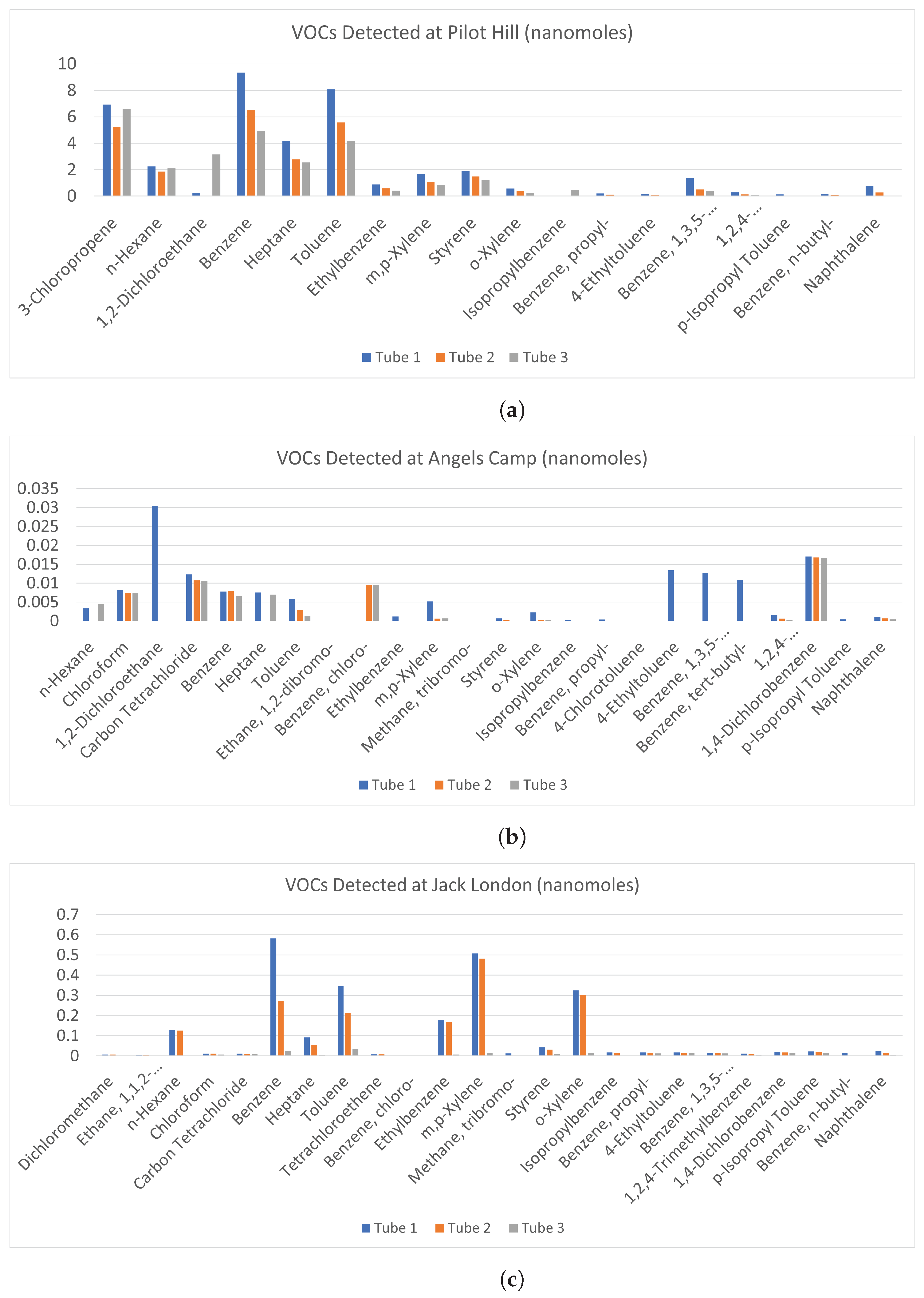
3.2. VOC Air Sampler Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| CAL FIRE | California Department of Forestry and Fire Protection |
| VOC | Volatile Organic Compound |
| WUI | Wildland Urban Interface |
| HAP | Hazardous Air Pollutants |
| EPA | Environmental Protection Agency |
| PCB | Printed Circuit Board |
| TD-GC-MS | Thermal Desorption-Gas Chromatography-Mass Spectrometry |
| IMU | Inertial Measurement Unit |
| RTC | Real Time Clock |
| FAA | Federal Aviation Administration |
References
- Altshuler, S.L.; Zhang, Q.; Kleinman, M.T.; Garcia-Menendez, F.; Moore, C.T.T.; Hough, M.L.; Stevenson, E.D.; Chow, J.C.; Jaffe, D.A.; Watson, J.G. Wildfire and prescribed burning impacts on air quality in the United States. J. Air Waste Manag. Assoc. 2020, 70, 961–970. [Google Scholar] [CrossRef] [PubMed]
- McClure, C.D.; Jaffe, D.A. US particulate matter air quality improves except in wildfire-prone areas. Proc. Natl. Acad. Sci. USA 2018, 115, 7901–7906. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Larsen, A.E.; Reich, B.J.; Ruminski, M.; Rappold, A.G. Impacts of fire smoke plumes on regional air quality, 2006–2013. J. Expo. Sci. Environ. Epidemiol. 2017, 28, 319–327. [Google Scholar] [CrossRef] [Green Version]
- Fann, N.; Alman, B.; Broome, R.A.; Morgan, G.G.; Johnston, F.H.; Pouliot, G.; Rappold, A.G. The health impacts and economic value of wildland fire episodes in the U.S.: 2008–2012. Sci. Total Environ. 2017, 610–611, 802–809. [Google Scholar] [CrossRef] [PubMed]
- Williamson, G.J.; Bowman, D.M.J.S.; Price, O.F.; Henderson, S.B.; Johnston, F.H. A transdisciplinary approach to understanding the health effects of wildfire and prescribed fire smoke regimes. Environ. Res. Lett. 2016, 11, 125009. [Google Scholar] [CrossRef]
- Cascio, W.E. Wildland fire smoke and human health. Sci. Total. Environ. 2017, 624, 586–595. [Google Scholar] [CrossRef]
- Reid, C.E.; Brauer, M.; Johnston, F.H.; Jerrett, M.; Balmes, J.R.; Elliott, C.T. Critical Review of Health Impacts of Wildfire Smoke Exposure. Environ. Health Perspect. 2016, 124, 1334–1343. [Google Scholar] [CrossRef] [Green Version]
- Borchers Arriagada, N.; Horsley, J.A.; Palmer, A.J.; Morgan, G.G.; Tham, R.; Johnston, F.H. Association between fire smoke fine particulate matter and asthma-related outcomes: Systematic review and meta-analysis. Environ. Res. 2019, 179, 108777. [Google Scholar] [CrossRef]
- Brook, R.D.; Rajagopalan, S.; Pope, C.A.; Brook, J.R.; Bhatnagar, A.; Diez-Roux, A.V.; Holguin, F.; Hong, Y.; Luepker, R.V.; Mittleman, M.A.; et al. Particulate Matter Air Pollution and Cardiovascular Disease: An Update to the Scientific Statement from the American Heart Association. Circulation 2010, 121, 2331–2378. [Google Scholar] [CrossRef] [Green Version]
- Ford, B.; Val Martin, M.; Zelasky, S.E.; Fischer, E.V.; Anenberg, S.C.; Heald, C.L.; Pierce, J.R. Future Fire Impacts on Smoke Concentrations, Visibility, and Health in the Contiguous United States. Geohealth 2018, 2, 229–247. [Google Scholar] [CrossRef] [Green Version]
- Lambey, V.; Prasad, A.D. A Review on Air Quality Measurement Using an Unmanned Aerial Vehicle. Water Air Soil Pollut. 2021, 232, 109. [Google Scholar] [CrossRef]
- Villa, T.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [Green Version]
- Kaduwela, A.P.; Kaduwela, A.P.; Jrade, E.; Brusseau, M.; Morris, S.; Morris, J.; Risk, V. Development of a low-cost air sensor package and indoor air quality monitoring in a California middle school: Detection of a distant wildfire. J. Air Waste Manag. Assoc. 2019, 69, 1015–1022. [Google Scholar] [CrossRef]
- Falabella, A.D.; Wallin, D.O.; Lund, J.A. Application of a customizable sensor platform to detection of atmospheric gases by UAS. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 883–890. [Google Scholar] [CrossRef]
- Corrigan, C.E.; Roberts, G.C.; Ramana, M.V.; Kim, D.; Ramanathan, V. Capturing vertical profiles of aerosols and black carbon over the Indian Ocean using autonomous Unmanned Aerial Vehicles. Atmos. Meas. Tech. 2008, 8, 737–747. [Google Scholar] [CrossRef] [Green Version]
- Motlagh, N.H.; Irjala, M.; Zuniga, A.; Lagerspetz, E.; Rantala, V.; Flores, H.; Nurmi, P.; Tarkoma, S. Toward Blue Skies: City-Scale Air Pollution Monitoring Using UAVs. IEEE Consum. Electron. Mag. 2022, 12, 21–31. [Google Scholar] [CrossRef]
- Li, X.B.; Wang, D.S.; Lu, Q.C.; Peng, Z.R.; Wang, Z.Y. Investigating vertical distribution patterns of lower tropospheric PM2.5 using unmanned aerial vehicle measurements. Atmos. Environ. 2018, 173, 62–71. [Google Scholar] [CrossRef]
- Liu, B.; Wu, C.; Ma, N.; Chen, Q.; Li, Y.; Ye, J.; Martin, S.T.; Li, Y.J. Vertical profiling of fine particulate matter and black carbon by using unmanned aerial vehicle in Macau, China. Sci. Total Environ. 2019, 709, 136109. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Z.; Peng, Z.R.; Wang, D. Using unmanned aerial vehicle to investigate the vertical distribution of fine particulate matter. Int. J. Environ. Sci. Technol. 2019, 17, 219–230. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, Z.; Park, Y.; Fan, X.; Bai, D.; Zong, P.; Qin, B.; Cai, X.; Ahn, K.H. Measurements of atmospheric aerosol vertical distribution above North China Plain using hexacopter. Sci. Total Environ. 2019, 665, 1095–1102. [Google Scholar] [CrossRef]
- Li, B.; Cao, R.; Wang, Z.; Song, R.F.; Peng, Z.R.; Xiu, G.; Fu, Q. Use of Multi-Rotor Unmanned Aerial Vehicles for Fine-Grained Roadside Air Pollution Monitoring. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 169–180. [Google Scholar] [CrossRef]
- Gu, Q.; Michanowicz, R.; Jia, C. Developing a Modular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef] [Green Version]
- Al Tahtawi, A.R.; Andika, E.; Yusuf, M.; Harjanto, W.N. Design of Quadrotor UAV and Internet-of-Things Based Air Pollution Monitoring Systems. JITEE (Int. J. Inf. Technol. Electr. Eng.) 2020, 3, 120–127. [Google Scholar] [CrossRef]
- Stojcsics, D.; Domozi, Z.; Molnar, A. Air Pollution Localisation Based on UAV Survey. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2546–2551. [Google Scholar] [CrossRef]
- Cozma, A.; Firculescu, A.C.; Tudose, D.; Ruse, L. Autonomous Multi-Rotor Aerial Platform for Air Pollution Monitoring. Sensors 2022, 22, 860. [Google Scholar] [CrossRef] [PubMed]
- Kersnovski, T.; Gonzalez, F.; Morton, K. A UAV system for autonomous target detection and gas sensing. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar] [CrossRef]
- Rohi, G.; Ejofodomi, O.; Ofualagba, G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones. Heliyon 2020, 6, e03252. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bhandari, S.; Casillas, G.; Aly, N.A.; Zhu, R.; Newman, G.; Wright, F.A.; Miller, A.; Adler, G.; Rusyn, I.; Chiu, W.A. Spatial and Temporal Analysis of Impacts of Hurricane Florence on Criteria Air Pollutants and Air Toxics in Eastern North Carolina. Int. J. Environ. Res. Public Health 2022, 19, 1757. [Google Scholar] [CrossRef]
- Woolfenden, E. Sorbent-based sampling methods for volatile and semi-volatile organic compounds in air. J. Chromatogr. A 2010, 1217, 2674–2684. [Google Scholar] [CrossRef]
- McKinney, K.A.; Wang, D.; Ye, J.; de Fouchier, J.B.; Guimarães, P.C.; Batista, C.E.; Souza, R.A.F.; Alves, E.G.; Gu, D.; Guenther, A.B.; et al. A sampler for atmospheric volatile organic compounds by copter Unmanned Aerial Vehicles. Atmos. Meas. Technol. 2019, 12, 3123–3135. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Scircle, A.; Black, O.; Cizdziel, J.V.; Watson, N.; Wevill, D.; Zhou, Y. On the use of multicopters for sampling and analysis of volatile organic compounds in the air by adsorption/thermal desorption GC-MS. Air Qual. Atmos. Health 2018, 11, 835–842. [Google Scholar] [CrossRef]
- Simms, L.A.; Borras, E.; Chew, B.S.; Matsui, B.; McCartney, M.M.; Robinson, S.K.; Kenyon, N.; Davis, C.E. Environmental sampling of volatile organic compounds during the 2018 Camp Fire in Northern California. J. Environ. Sci. 2020, 103, 135–147. [Google Scholar] [CrossRef]
- Aurell, J.; Mitchell, W.; Chirayath, V.; Jonsson, J.; Tabor, D.; Gullett, B. Field determination of multipollutant, open area combustion source emission factors with a hexacopter unmanned aerial vehicle. Atmos. Environ. 2017, 166, 433–440. [Google Scholar] [CrossRef]
- Cheng, W.H.; Yuan, C.S. Using a Micro Sampler on a Drone to Extract Organic Vapors—A Case Study of Monitoring Industrial Pollution. Aerosol Air Qual. Res. 2021, 21, 200359. [Google Scholar] [CrossRef]
- Austin, C.C.; Wang, D.; Ecobichon, D.J.; Dussault, G. Characterization of volatile organic compounds in smoke at municipal structural fires. J. Toxicol. Environ. Health Part A 2001, 63, 437–458. [Google Scholar] [CrossRef]
- Villa, T.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and Validation of a UAV Based System for Air Pollution Measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef] [Green Version]
- Prichard, S.J.; O’Neill, S.M.; Eagle, P.; Andreu, A.G.; Drye, B.; Dubowy, J.; Urbanski, S.; Strand, T.M. Wildland fire emission factors in North America: Synthesis of existing data, measurement needs and management applications. Int. J. Wildland Fire 2020, 29, 132–147. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Measurement | Operating Range |
|---|---|---|
| BME680 | Temperature | −40 to 85 °C |
| Barometric Pressure | 300 to 1100 hPa | |
| Relative Humidity | 0 to 100% r.H. | |
| SGP30 | eCO | 400–60,000 ppm |
| Total VOC | 0–60,000 ppb | |
| SCD41 | CO | 400–5000 ppm |
| PMSA003I | Particulate Matter | 0–500 g/m |
| SEN0231 | Formaldehyde (HCHO) | 0–5 ppm |
| MiCS-4514 | CO | 1–1000 ppm |
| NO | 0.05–10 ppm | |
| NH | 1–500 ppm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ragbir, P.; Kaduwela, A.; Passovoy, D.; Amin, P.; Ye, S.; Wallis, C.; Alaimo, C.; Young, T.; Kong, Z. UAV-Based Wildland Fire Air Toxics Data Collection and Analysis. Sensors 2023, 23, 3561. https://doi.org/10.3390/s23073561
Ragbir P, Kaduwela A, Passovoy D, Amin P, Ye S, Wallis C, Alaimo C, Young T, Kong Z. UAV-Based Wildland Fire Air Toxics Data Collection and Analysis. Sensors. 2023; 23(7):3561. https://doi.org/10.3390/s23073561
Chicago/Turabian StyleRagbir, Prabhash, Ajith Kaduwela, David Passovoy, Preet Amin, Shuchen Ye, Christopher Wallis, Christopher Alaimo, Thomas Young, and Zhaodan Kong. 2023. "UAV-Based Wildland Fire Air Toxics Data Collection and Analysis" Sensors 23, no. 7: 3561. https://doi.org/10.3390/s23073561