
Coordinated Optimal Control of AFS and DYC for Four-Wheel Independent Drive Electric Vehicles Based on MAS Model
 ,
,
Abstract
:1. Introduction
2. Dimensionality Reduction of 4WIDEV Dynamics Model Based on Vector Transformation
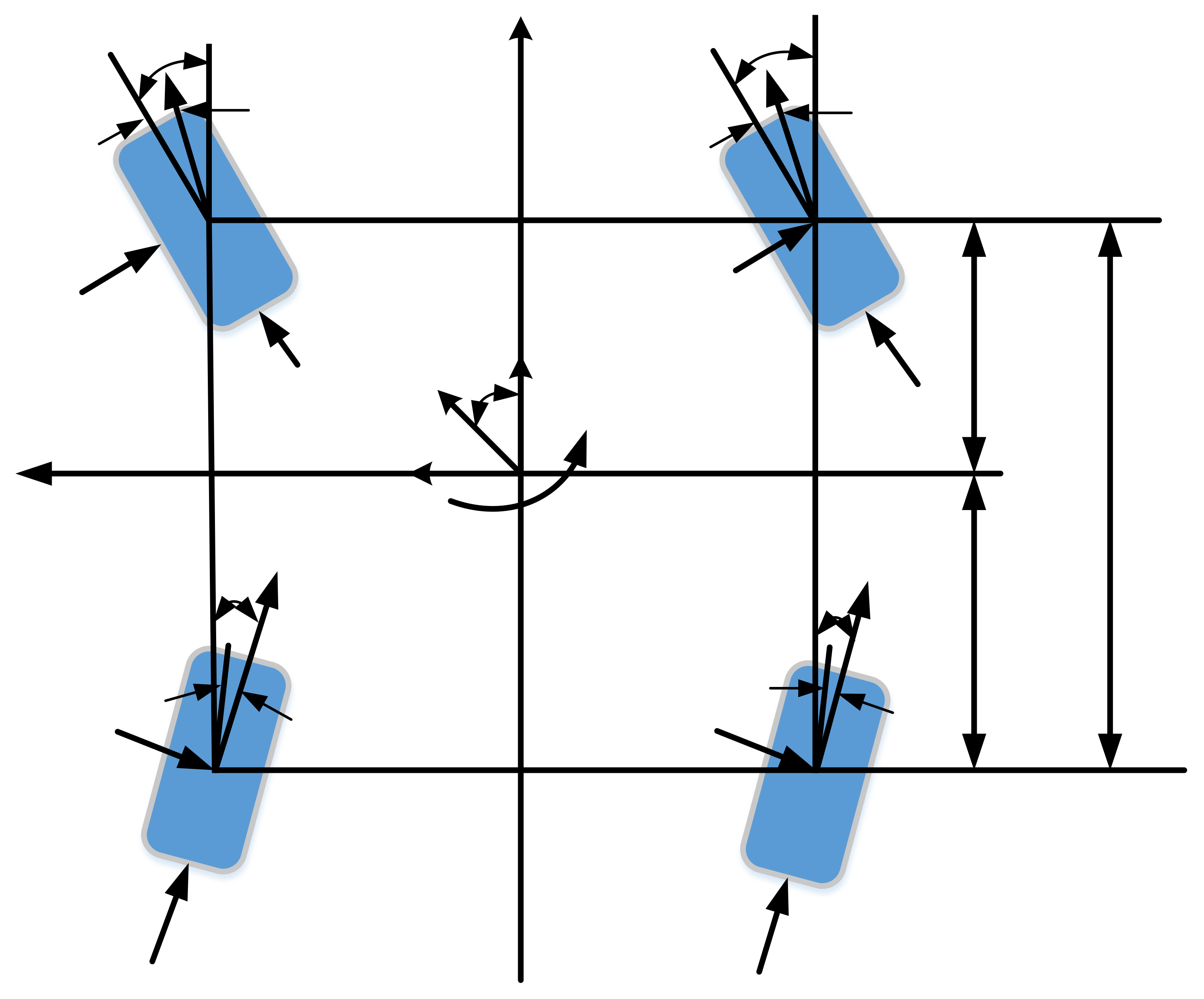
2.1. Four-Wheel Independent Drive Electric Vehicle Dynamics Model
2.2. Reference Model for 4WIDEV Dynamics
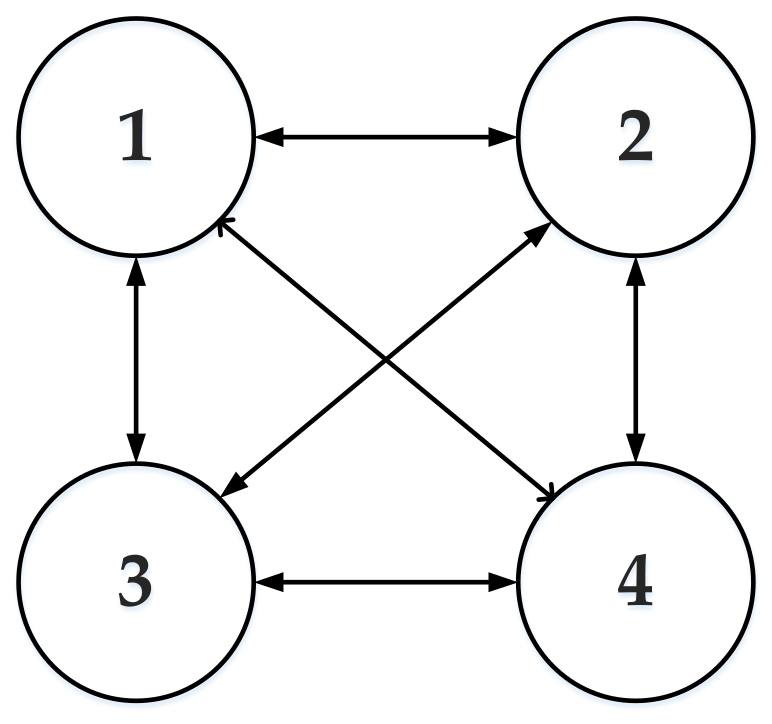
3. AFS and DYC Coordination Control Model for 4WIDEV Based on Graph Theory
3.1. Four-Wheel Independent Drive Electric Vehicle AFS and DYC Coordination Control Model
3.2. AFS and DYC Deviation Models for Four-Wheel Independent Drive Electric Vehicles Based on Graph Theory
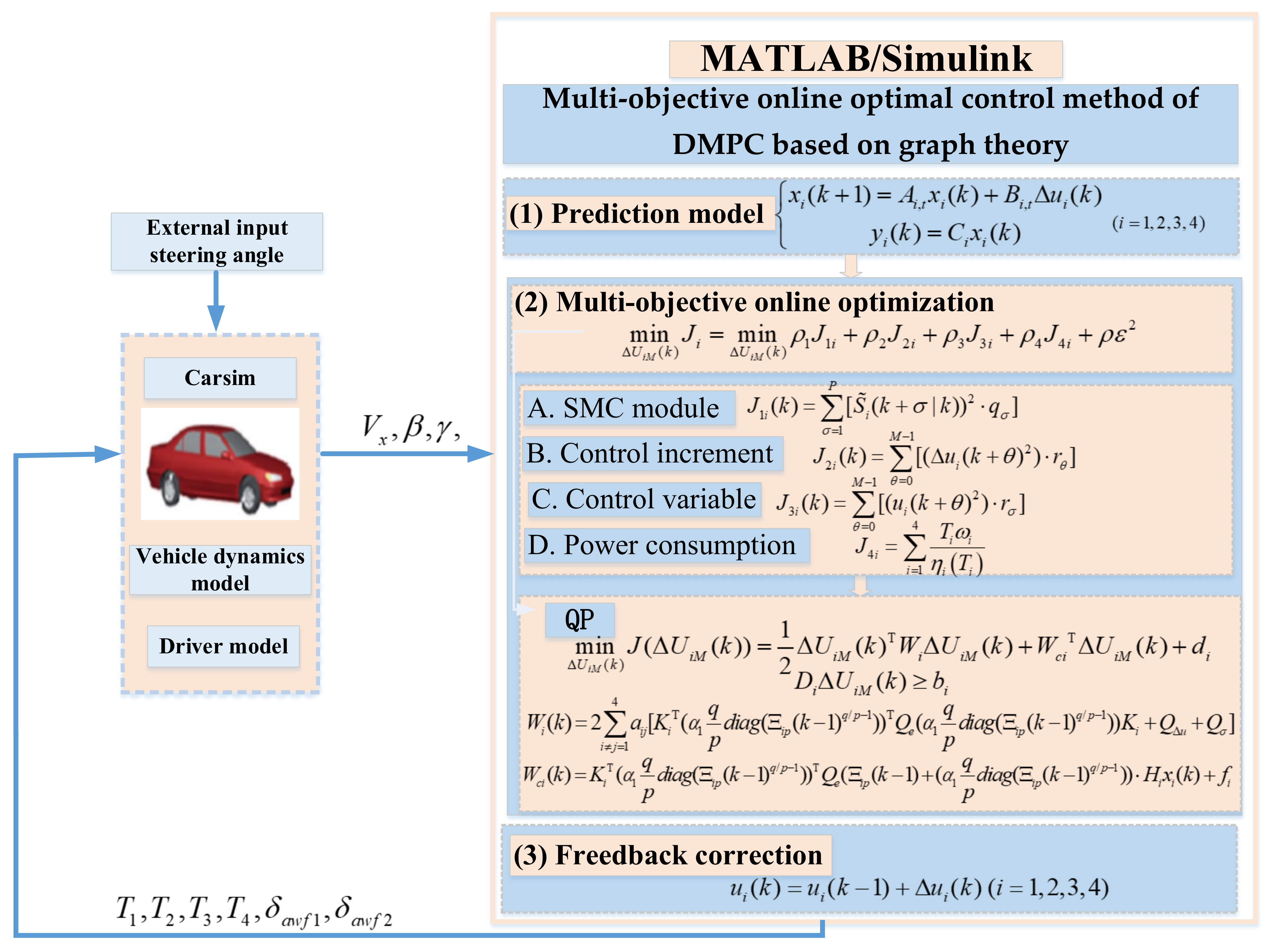
4. Multi-Objective Online Optimal Control Method for DMPC Based on Dynamic Sliding Mode
4.1. AFS and DYC Coordinated Control Prediction Equation for 4WIDEV
4.2. Objective Function and Constraints of Coordinated Control of AFS and DYC for 4WIDEV Based on Dynamic Sliding Mode
4.3. Optimal Solution
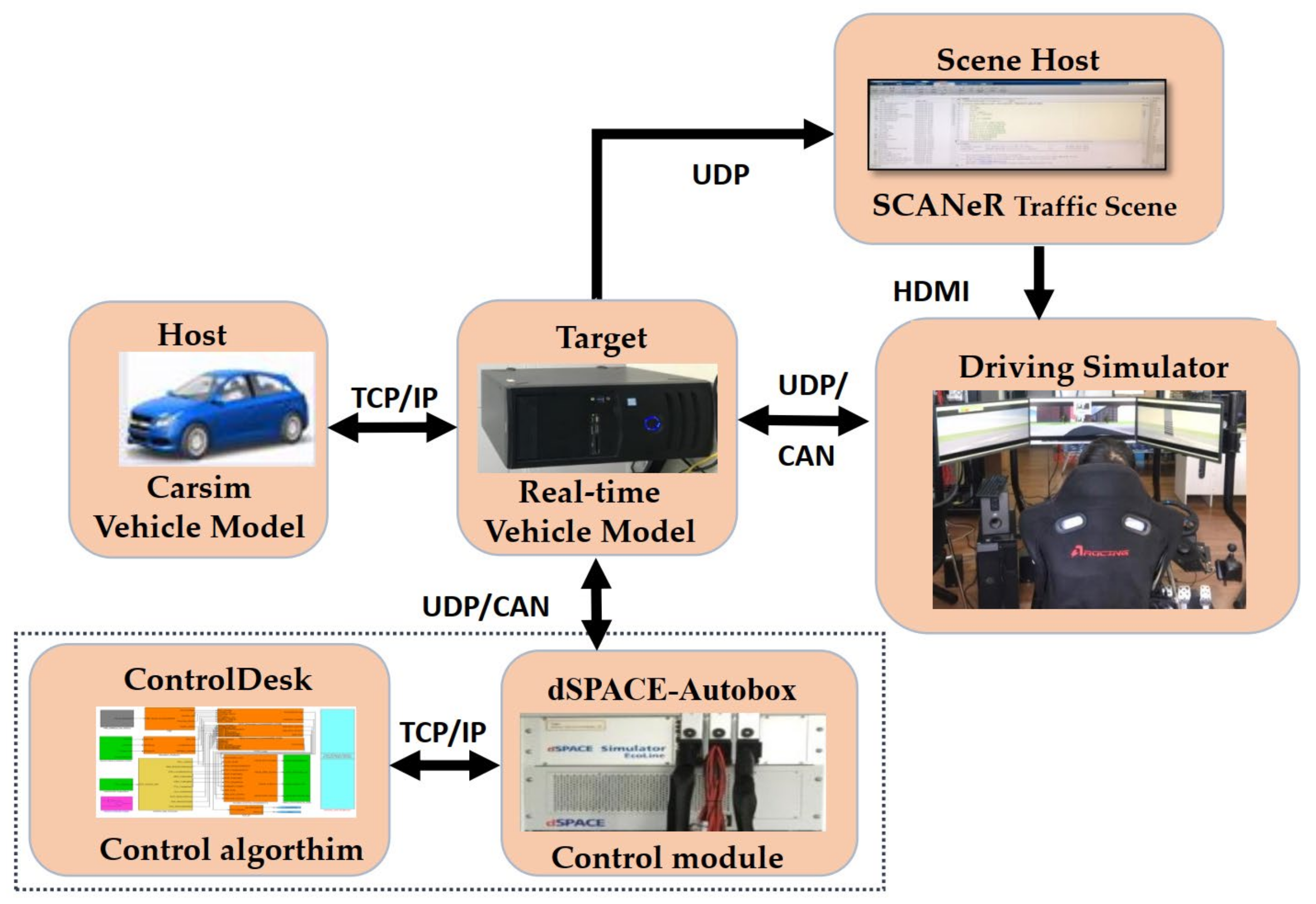
5. Simulation Test Verification
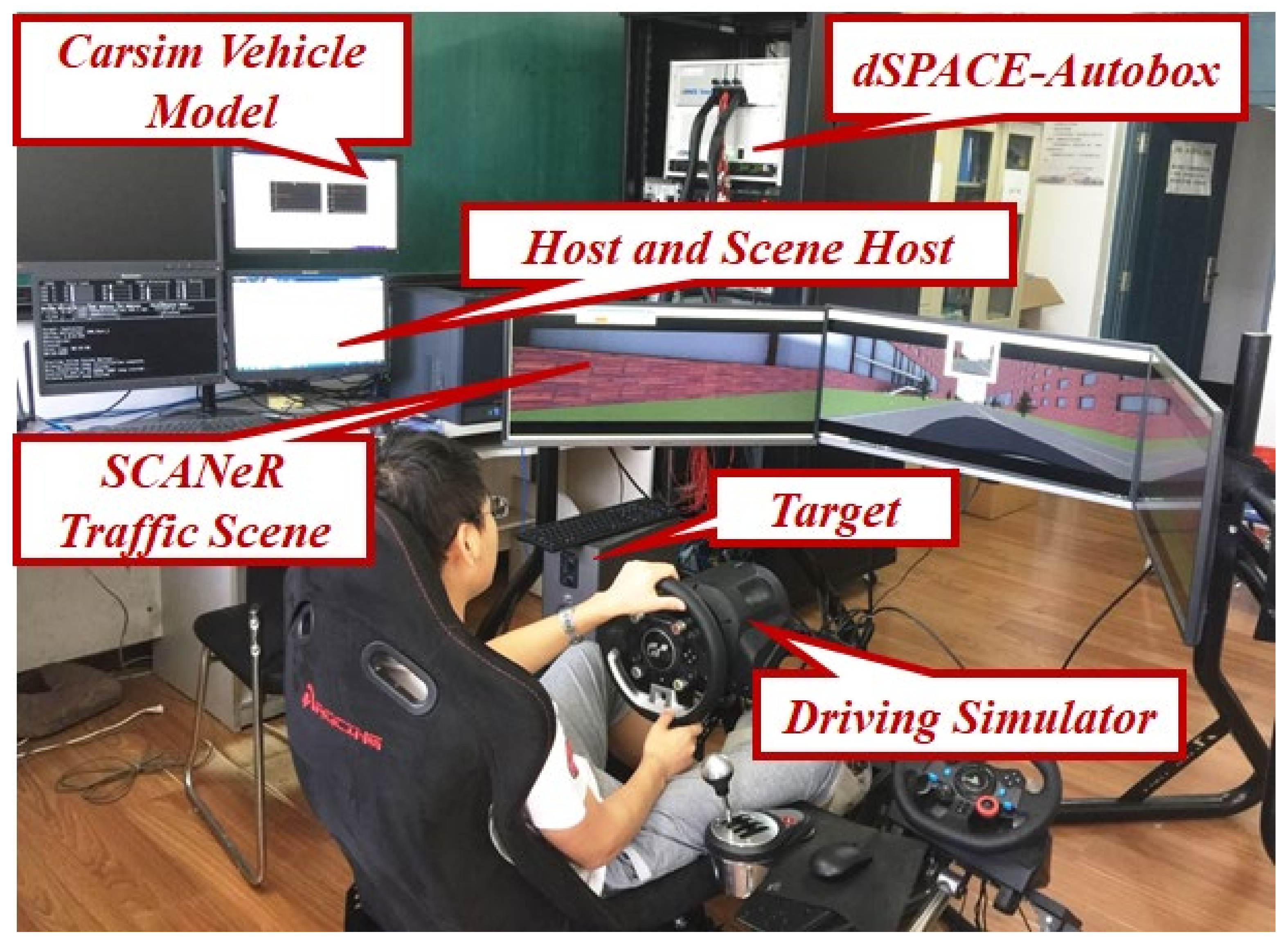
5.1. CarSim Vehicle Model Building
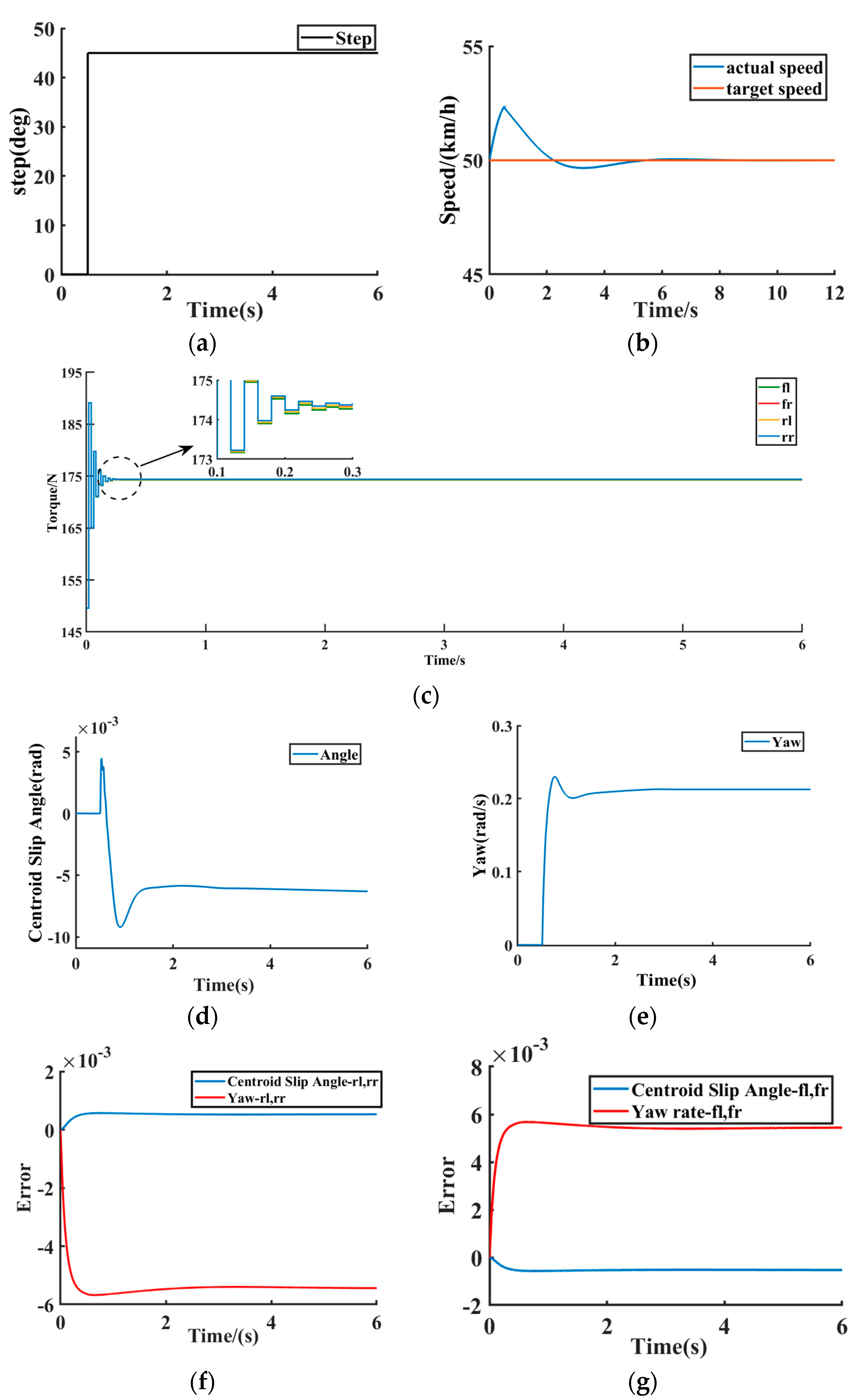
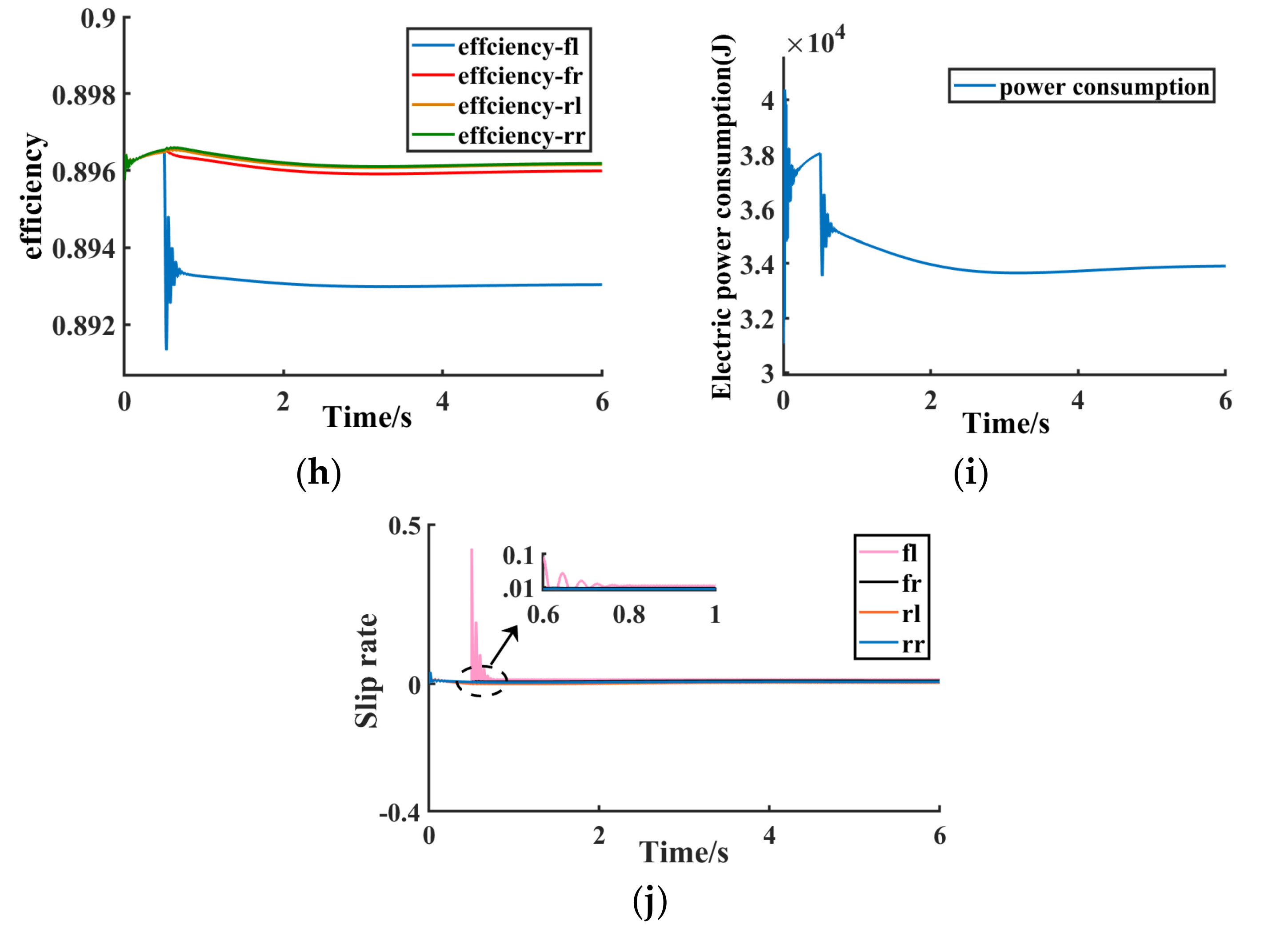
5.2. Constant Speed Turning Conditions
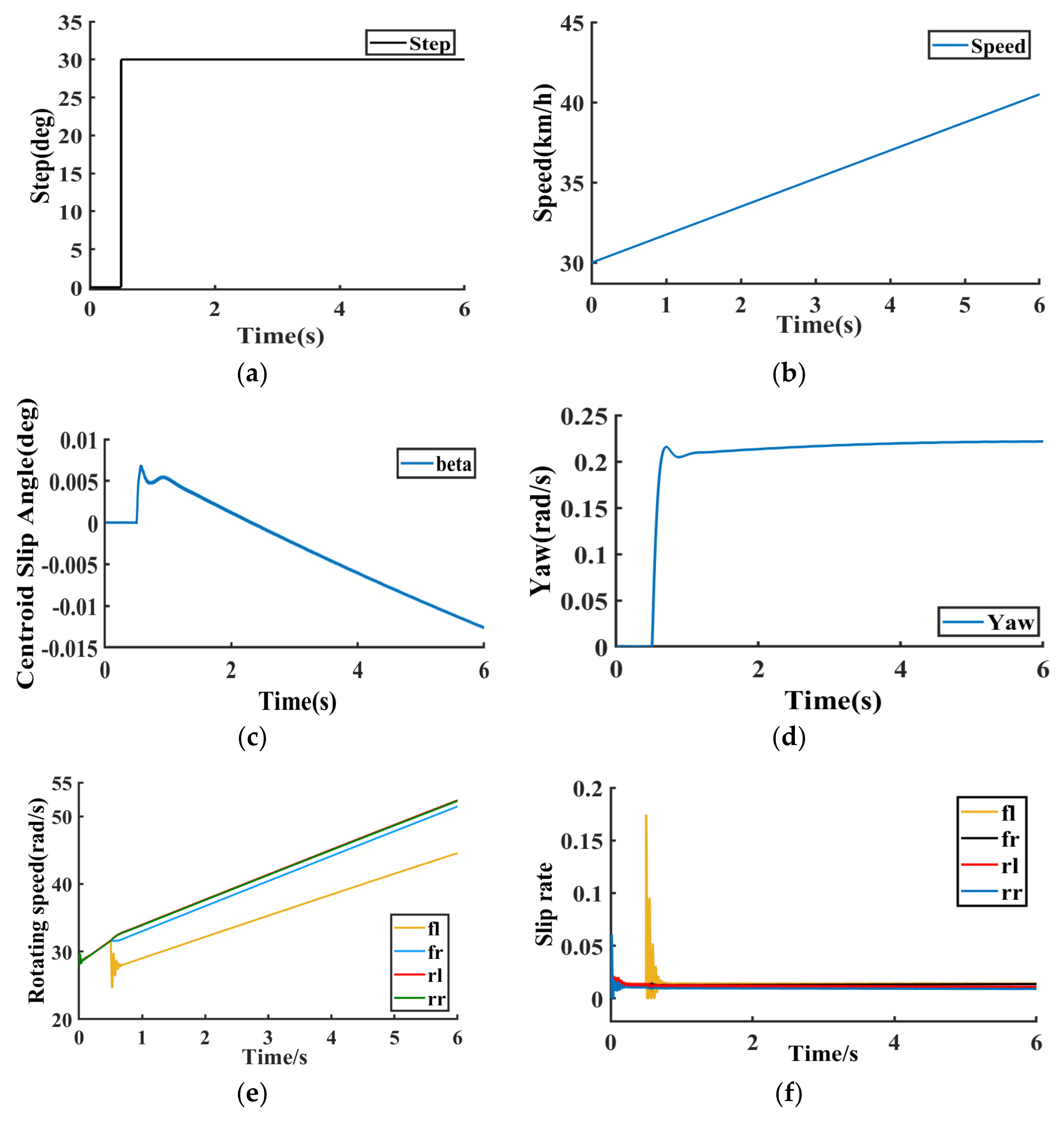
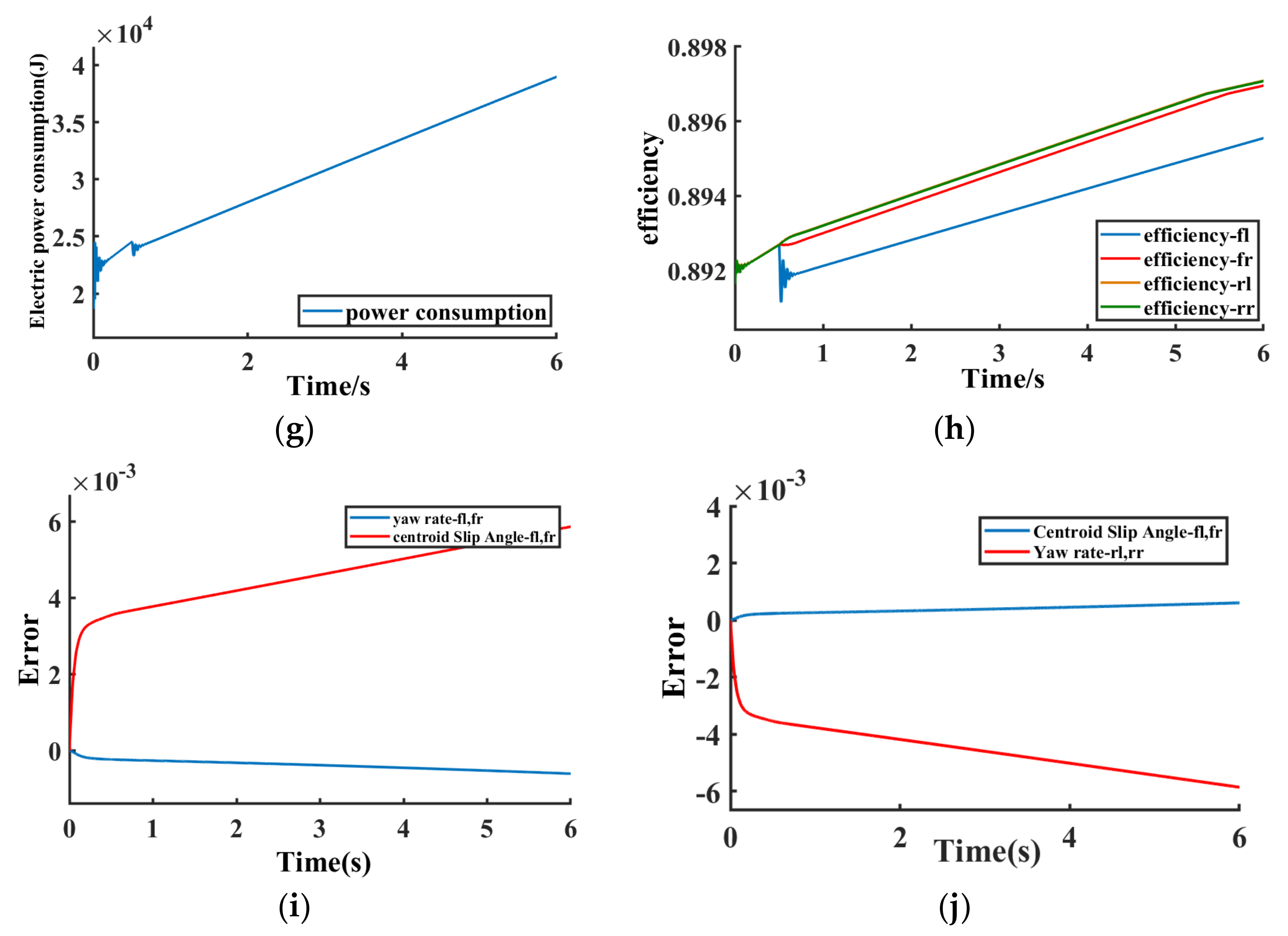
5.3. Accelerated Turning Conditions
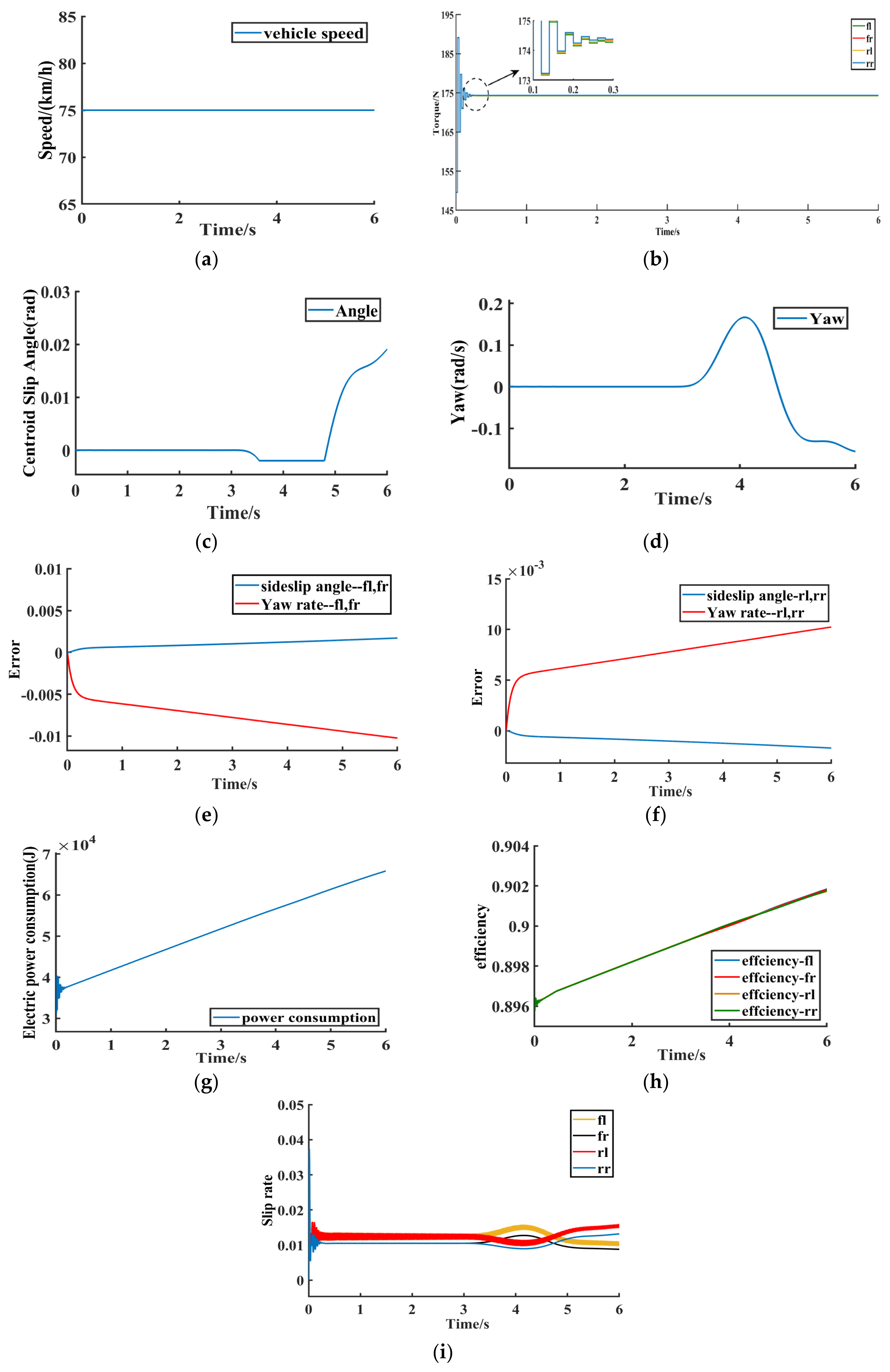
5.4. DLC Maneuver on Slippery Road
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ouyang, D.; Zhou, S.; Ou, X. The total cost of electric vehicle ownership: Aconsumer-oriented study of China’s post-subsidy era. Energy Pol. 2021, 149, 112023. [Google Scholar] [CrossRef]
- Xu, W.; Chen, H.; Zhao, H.; Ren, B. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system. Mechatronics 2019, 57, 95–108. [Google Scholar] [CrossRef]
- Hou, X.; Zhang, J.; Ji, Y.; Liu, W.; He, C. Autonomous drift controller for distributed drive electric vehicle with input coupling and uncertain disturbance. ISA Trans. 2021, 120, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Malvezzi, F.; Coelho, T.A.H.; Orsino, R.M.M. Feasibility and performance analyses for an active geometry control suspension system for over-actuated vehicles. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 178. [Google Scholar] [CrossRef]
- Zhang, W.; Drugge, L.; Nybacka, M.; Wang, Z. Active camber for enhancing path following and yaw stability of over-actuated autonomous electric vehicles. Veh. Syst. Dyn. 2021, 59, 800–821. [Google Scholar] [CrossRef]
- Gan, W.; Zhu, D.; Ji, D. QPSO-model predictive control-based approach to dynamic trajectory tracking control for unmanned underwater vehicles. Ocean. Eng. 2018, 158, 208–220. [Google Scholar] [CrossRef]
- Bezerra, J.; Santos, D. On the guidance of fully-actuated multi-rotor aerial vehicles under control allocation constraints using the receding-horizon strategy. ISA Trans. 2021, 126, 21–35. [Google Scholar] [CrossRef]
- Zhai, L.; Sun, T.; Wang, J. Electronic stability control based on motor driving and braking torque distribution for a four-in-wheel motor drive electric vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Jiang, Y.; Meng, H.; Chen, G.; Yang, C.; Xu, X.; Zhang, L.; Xu, H. Differential-steering based path tracking control and energy-saving torque distribution strategy of 6WID unmanned ground vehicle. Energy 2022, 254, 124209. [Google Scholar] [CrossRef]
- Wei, H.; Zhang, N.; Liang, J.; Ai, Q.; Zhao, W.; Huang, T.; Zhang, Y. Deep reinforcement learning based direct torque control strategy for distributed drive electric vehicles considering active safety and energy saving performance. Energy 2022, 238, 121725. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Wang, Z.; Dong, P.; Cheng, Y.; Xu, X.; Tenberge, P. Adaptive fuzzy iterative control strategy for the wet-clutch filling of automatic transmission. Mech. Syst. Signal Process. 2019, 130, 164–182. [Google Scholar] [CrossRef]
- Lin, F.; Qian, C.; Cai, Y.; Zhao, Y.; Wang, S.; Zang, L. Integrated tire slip energy dissipation and lateral stability control of distributed drive electric vehicle with mechanical elastic wheel. J. Frankl. Inst. 2022, 359, 4776–4803. [Google Scholar] [CrossRef]
- Wang, C.; He, R.; Jing, Z.; Chen, S. Coordinated Path Following Control of 4WID-EV Based on Backstepping and Model Predictive Control. Energies 2022, 15, 5728. [Google Scholar] [CrossRef]
- Jing, C.Q.; Shu, H.Y.; Shu, R.; Song, Y. Integrated control of electric vehicles based on active front steering and model predictive control. Control. Eng. Pract. 2022, 121, 105066. [Google Scholar] [CrossRef]
- Zhai, L.; Wang, C.; Hou, Y.; Hou, R.; Ming Mok, Y.; Zhang, X. Two-level optimal torque distribution for handling stability control of a four hub-motor independent. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 237, 544–559. [Google Scholar] [CrossRef]
- Zhai, L.; Hou, R.; Sun, T.; Kavuma, S. Continuous steering stability control based on an energy-saving torque distribution algorithm for a four in-wheel-motor independent-drive electric vehicle. Energies 2018, 11, 350. [Google Scholar] [CrossRef]
- Pi, D.; Xue, P.; Xie, B.; Wang, H.; Tang, X.; Hu, X. A Platoon Control Method Based on DMPC for Connected Energy-Saving Electric Vehicles. IEEE Trans. Transp. Electrification 2022, 8, 3219–3235. [Google Scholar] [CrossRef]
- Tang, C.; Khajepour, A. Wheel Modules with Distributed Controllers: A Multi-Agent Approach to Vehicular Control. IEEE Trans. Veh. Technol. 2020, 69, 10879–10888. [Google Scholar] [CrossRef]
- Liang, J.; Lu, Y.; Yin, G.; Fang, Z.; Zhuang, W.; Ren, Y.; Xu, L.; Li, Y. A Distributed Integrated Control Architecture of AFS and DYC based on MAS for Distributed Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 5565–5577. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, J.; Li, Z.; Li, S.; Ding, H. Multi-Agent-Based Coordinated Control of ABS and AFS for Distributed Drive Electric Vehicles. Energies 2022, 15, 1919. [Google Scholar] [CrossRef]
- Wei, H.; Ai, Q.; Zhao, W.; Zhang, Y. Modelling and experimental validation of an EV torque distribution strategy towards active safety and energy efficiency. Energy 2022, 239, 121953. [Google Scholar] [CrossRef]
- Zhao, Y.; Deng, H.; Li, Y.; Xu, H. Coordinated control of stability and economy based on torque distribution of distributed drive electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 234, 1792–1806. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed Model Predictive Control for Heterogeneous Vehicle Platoons Under Unidirectional Topologies. IEEE Trans. Control. Syst. Technol. 2017, 25, 899–910. [Google Scholar] [CrossRef]
- Li, K.; Bian, Y.; Li, S.E.; Xu, B.; Wang, J. Distributed model predictive control of multi-vehicle systems with switching communication topologies. Transp. Res. Part C Emerg. Technol. 2020, 118, 102717. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J. Adaptive Energy-Efficient Control Allocation for Planar Motion Control of Over-Actuated Electric Ground Vehicles. IEEE Trans. Control. Syst. Technol. 2013, 22, 1362–1373. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; Xiang, C.; Li, L.; Wang, X. Torque Coordinated Control of Four In-Wheel Motor Independent-Drive Vehicles with Consideration of the Safety and Economy. IEEE Trans. Veh. Technol. 2019, 68, 9604–9618. [Google Scholar] [CrossRef]
- Pacejka, H. Tire and Vehicle Dynamics; Elsevier: Amsterdam, Netherlands, 2005. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Vehicle mass | 1500 |
| Wheelbase | 2.33 |
| Track width | 1.48 |
| Distance from centroid to front axle | 1.165 |
| Distance from centroid to rear axle | 1.155 |
| Centroid height | 0.375 |
| Wheel radius | 0.33 |
| Peak torque | 600 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, N.; Wang, J.; Li, Z.; Xu, N.; Ding, H.; Zhang, Z.; Guo, K.; Xu, H. Coordinated Optimal Control of AFS and DYC for Four-Wheel Independent Drive Electric Vehicles Based on MAS Model. Sensors 2023, 23, 3505. https://doi.org/10.3390/s23073505
Zhang N, Wang J, Li Z, Xu N, Ding H, Zhang Z, Guo K, Xu H. Coordinated Optimal Control of AFS and DYC for Four-Wheel Independent Drive Electric Vehicles Based on MAS Model. Sensors. 2023; 23(7):3505. https://doi.org/10.3390/s23073505
Chicago/Turabian StyleZhang, Niaona, Jieshu Wang, Zonghao Li, Nan Xu, Haitao Ding, Zhe Zhang, Konghui Guo, and Haochen Xu. 2023. "Coordinated Optimal Control of AFS and DYC for Four-Wheel Independent Drive Electric Vehicles Based on MAS Model" Sensors 23, no. 7: 3505. https://doi.org/10.3390/s23073505