2.1. Working Principle
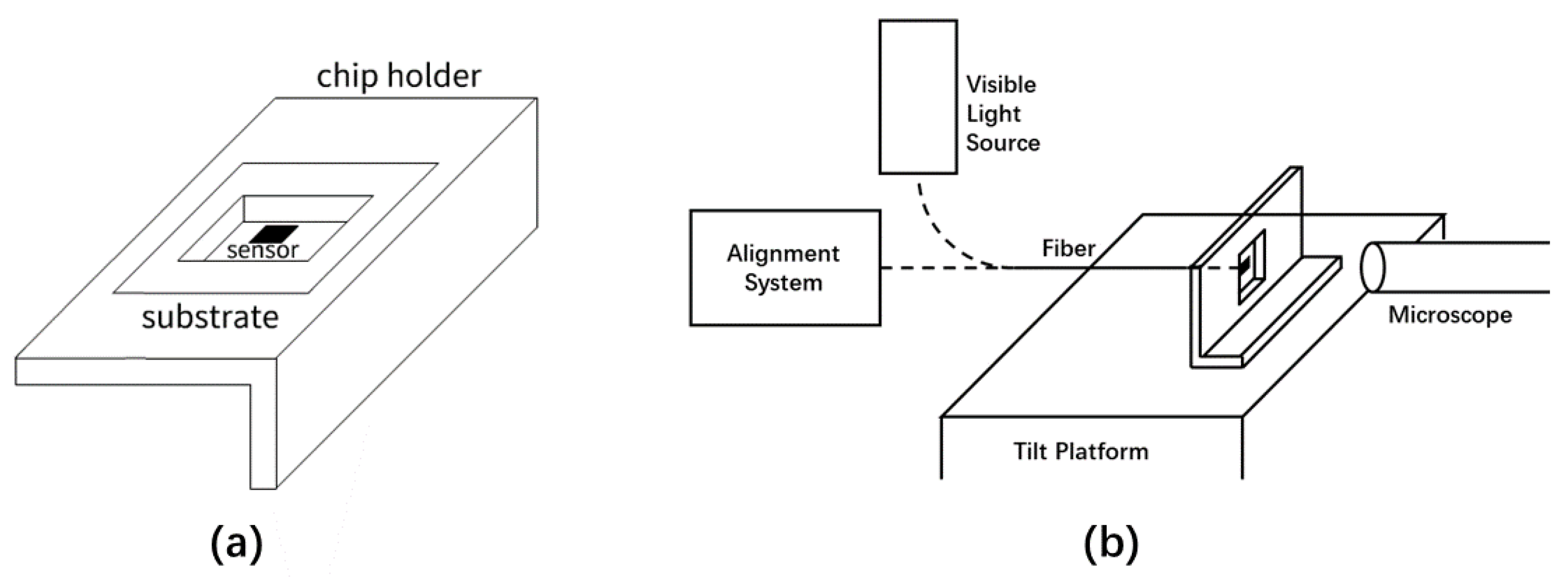
Our alignment method is based on the simple idea that the reflected wave intensity will be different when the beam spot of the optical fiber falls on the sensor or substrate, provided that the reflectivity of the sensor material is different than that of the substrate and other structures surrounding the sensor. There are stringent requirements that must be met in order to exploit this idea for sensor alignment, though. Not only do we have to use a signal wave with appreciably different reflectivity on the sensor material and substrate, but an exquisite optical circuit must be adopted that allows us to separate the reflected wave from the input signal and guide it to a power meter for accurate intensity measurement. To help interpret and appreciate the nuances of our alignment solution, we consider the specific design shown in
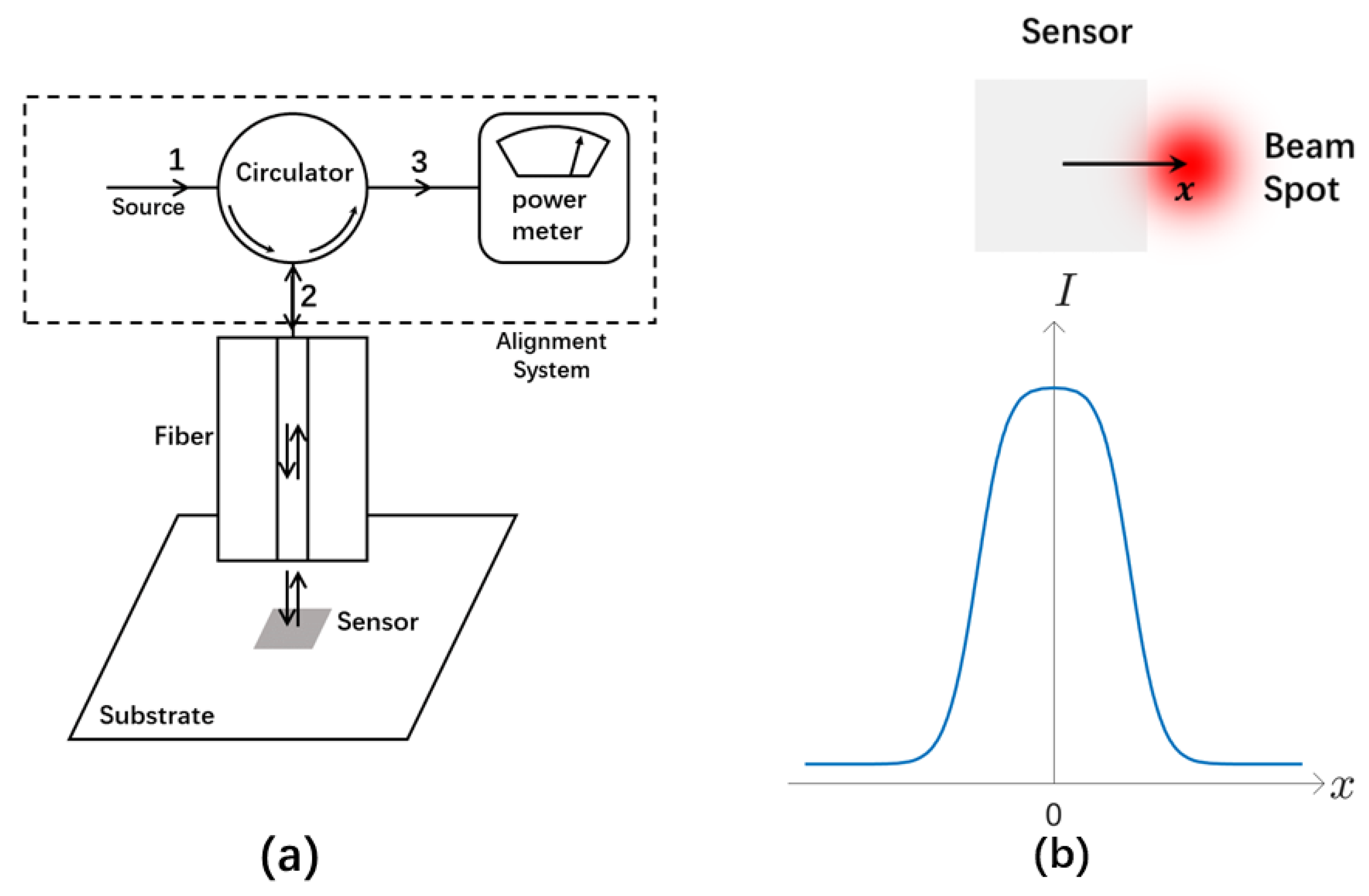
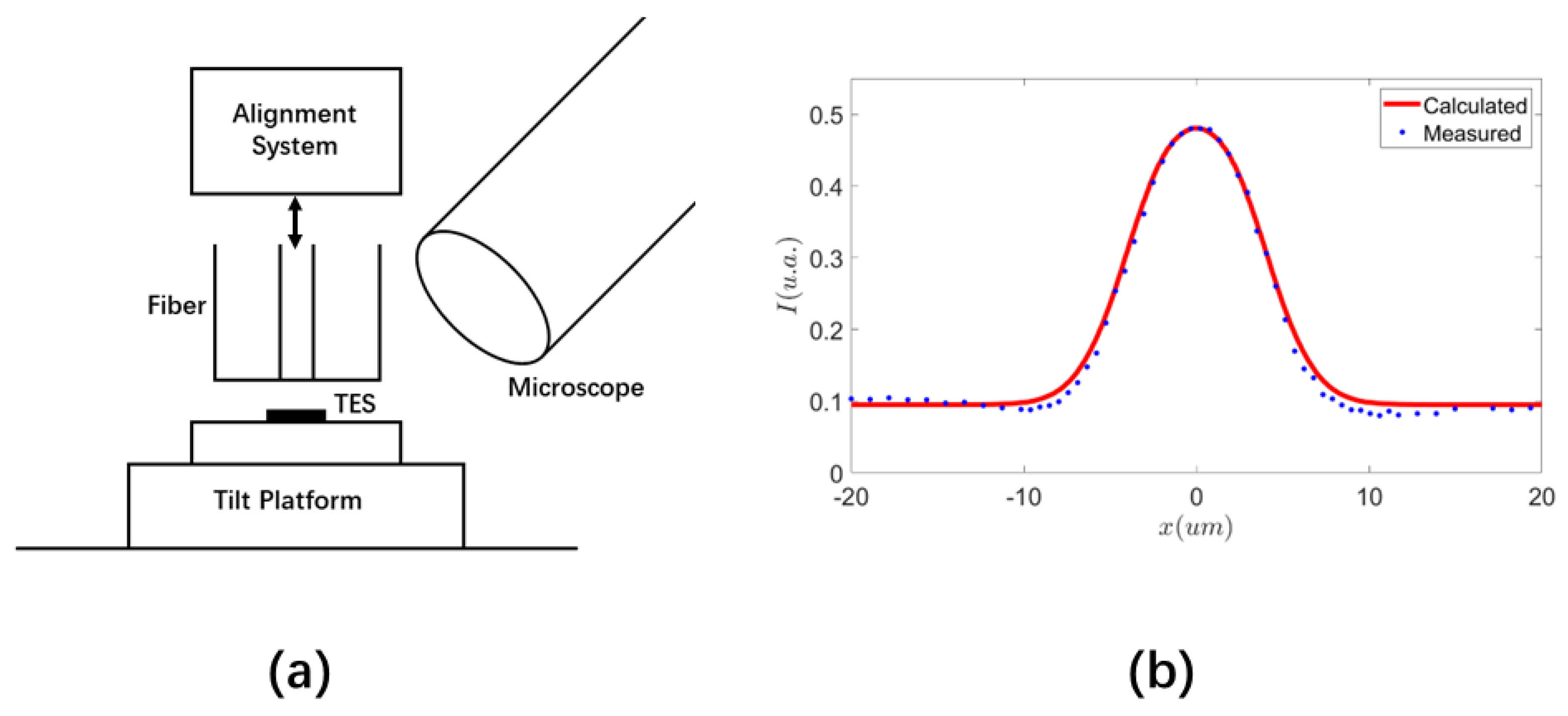
Figure 1a. In this setup, an input signal from the source port of the circulator is incident on the surface of the sensor chip when it exits the guiding single-mode optical fiber. After normal incidence and reflection, it returns to the fiber and travels in the opposite direction in it. In order to measure the intensity of the reflected wave, it must be separated from the input signal. This is accomplished by using an optical circulator [
19] in
Figure 1a, a kind of optical isolator element in which light can only travel in one direction. Because of the circulator, the reflected wave is directed to a different port than the source port in
Figure 1, where we can measure its intensity by using a power meter.
If the reflectivity of the input signal on the sensor material is different than that of the substrate and other structures surrounding the sensor, we will be able to tell if the fiber output is reflected by the sensor and therefore aligned with it by the intensity of the reflected wave. In fact, when we adjust the position of the optical fiber relative to the sensor, we expect to observe a jump in the intensity of the reflected wave when the beam spot of the fiber moves across the boundary between the sensor and its neighboring structures, as shown in
Figure 1b. This change can be positive or negative depending on the relative reflectivity of the sensor material and its neighboring structures, and it should be more appreciable when the difference in reflectivity is large. Obviously, this jump in the reflected wave intensity across the boundary of the sensor can be used to determine the position of the sensor and help align it with the fiber. In such a technique, the position of the beam spot relative to the sensor can be inferred by monitoring the intensity of the reflected wave. It is then possible to adjust their positions until they are aligned.
The alignment system in
Figure 1a consists of ordinary and low-cost optical elements that are highly robust and reliable. The entire alignment procedure involves only observation and manipulation from the front side of the sensor chip, using well-established and widely-used optical techniques such as opto-mechanical positioning and optical signal isolation. Requiring neither advanced microfabrication [
17,
18] nor the use of specialized infrared imaging equipment for through-chip observation from the backside of the sensor chip [
14,
15,
16], our alignment system in
Figure 1a constitutes a technically much easier solution enabled by a simple innovative concept. It lowers the barrier to microsensor alignment substantially, and it has a much lower implementation cost than conventional methods. Therefore, it is accessible to a much larger audience.
Though the working principle for our alignment solution shown in
Figure 1 is not complicated conceptually, a number of design choices must be made carefully and a few subtle technical hurdles must be addressed thoroughly in order to establish it for practical use. In the rest of this section, we focus on the following issues that are critical to our alignment scheme and prove that high precision can be achieved with appropriate choice on signal wavelength and optical mode, as well as the correct optical circuit design and system configuration.
A key element in our alignment scheme is that the reflected wave must couple back into the guiding fiber and travel in the opposite direction in it. As depicted in
Figure 1a, normal incidence and reflection on the surface of the sensor chip is the most favorable configuration for the reflected wave to couple back into the fiber efficiently. For such a condition to be met, it may be necessary to adjust the angle of incidence of the light on the surface of the sensor chip, which can be accomplished by using a tilt platform to change the orientation of the fiber relative to the sensor chip. However, a factor equally important for consideration is the inevitable divergence of the light beam when it leaves the fiber and propagates in the free space between the fiber end and the chip surface. Such divergence has an adverse effect on the coupling of the reflected wave back into the fiber. Its impact on our alignment method must be carefully assessed.
Another necessary condition for our alignment method to work is that there should be a well-defined boundary between the sensor and the substrate or other structures surrounding it, and the reflectivity of the signal wave across the boundary must be different. Intuitively, a larger contrast in reflectivity is more favorable. Nonetheless, it should be studied how the performance of our alignment technique is affected by the contrast in reflectivity.
Our alignment scheme takes advantage of the jump in the intensity of the reflected wave when the beam spot of the fiber crosses the boundary between the sensor and substrate to determine the location of the sensor. This jump is not infinitely sharp, however. There is a region in which the reflected wave intensity gradually changes from the value on the substrate to that on the sensor. The width of this transition is an important parameter that determines the precision of our alignment scheme. It is directly related to the intensity distribution of the fiber output. An inappropriate optical mode in the fiber like a high-order helical mode with a fragmented intensity pattern can blur this transition in reflected wave intensity and undermine the foundation of our alignment scheme. We must investigate quantitatively how the reflected wave intensity changes with the misalignment and make a comparison with experimental data to evaluate the performance of our technique.
2.2. Fiber Mode Profile and Output Beam Divergence
In our alignment system in
Figure 1a, we use an optical fiber to guide the alignment signal wave that is single-mode at its frequency. An optical sensor can be designed and optimized to detect photons at a particular frequency or frequency range. The wavelength for the signal used for alignment does not have to coincide with the sensor’s target detection frequency. It is advantageous to use a single-mode setup for alignment, however. Under such a configuration, the distribution of the optical field at the fiber end is known and we can accurately predict key metrics in our alignment scheme such as how severe the divergence of the light beam is and how the intensity of the reflected wave changes with misalignment. Multiple modes in the fiber can lead to uncertain and fragmented intensity distribution which can increase alignment error.
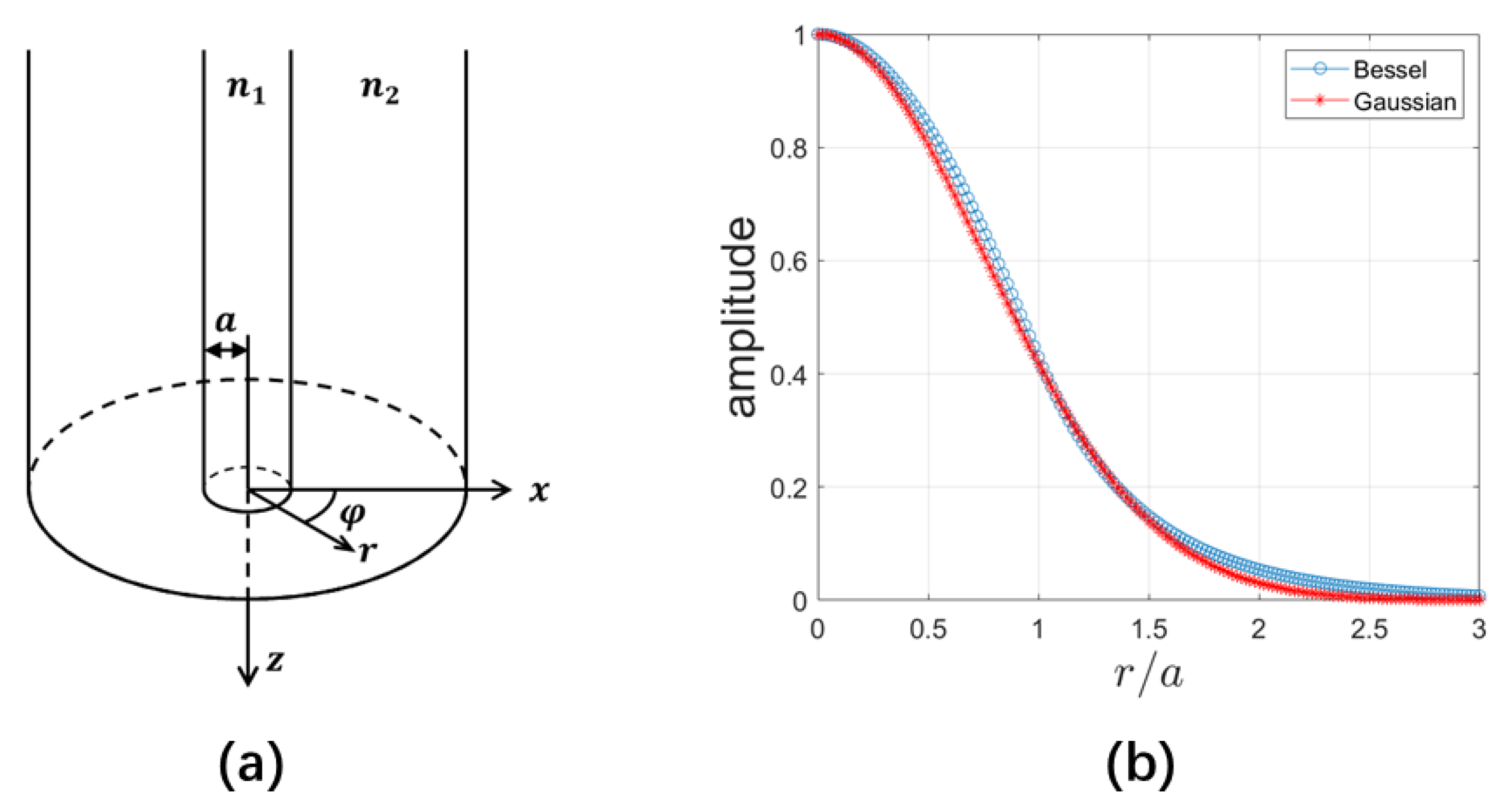
Solutions of optical modes in a step-index fiber shown in
Figure 2a can be found in many books and references [
20,
21]. For the reader’s convenience, we include a brief treatment in this section. We start with the Helmholtz Equation [
20]
where
F is the electric or magnetic field,
is the wave number in the vacuum with
the wavelength, and
is the index of refraction for the fiber core and cladding. A guided mode that propagates along the fiber axis takes the form
in the cylindrical coordinates, where
l is the phase winding number that takes an integer value
and
is the wave number along the fiber axis. Substituting Equation (
2) into the Helmholtz Equation (
1), we have
The solutions to Equation (
3) are the Bessel functions. Considering the restriction that the field in both the core (
with
a the radius of the core) and cladding should be bounded with finite energy, the solutions in the core and cladding are [
20]
where
is the
l-th order Bessel function of the first kind, and
is the
l-th order modified Bessel function of the second kind, and [
20]
Possible values for
and associated optical modes in the fiber can be obtained by the boundary conditions that require the electric and magnetic field to be continuous at the interface between the fiber core and cladding. For the optical fiber that we use, the core and cladding refraction index
and
are very close and they satisfy the weakly guiding condition
. Under such a condition, we have the following characteristics equation [
20],
The number of solutions to Equation (
6) depends on the so-called “V number” defined as follows,
where
is the numerical aperture of the fiber. The fiber used in our alignment system has a V number smaller than the first zero of
, 2.405, at the frequency of the signal wave for alignment. Consequently, there is only a single mode in the fiber whose field distribution is given by
where
C is a normalization coefficient.
The radial dependence of the single mode in Equation (
8) normalized to its maximum value is shown in
Figure 2b for a V number of 2.4. Shown also is the field profile of a Gaussian beam
normalized to its maximum value, where
has been so chosen that the intensity of the Bessel beam in Equation (
8) at
is
of its maximum intensity. I.e.,
. In such a specification, the value
can be considered the mode-field diameter (MFD) of the fiber. In
Figure 2b, it can be seen that the Gaussian beam is a very good approximation for the single-mode Bessel beam in the fiber. It can thus be used to understand the characteristics of the fiber output and calculate the intensity of the reflected wave.
When the light exits the fiber and propagates toward the sensor, it is no longer confined by the fiber and starts to spread. If the divergence of the signal wave is large, its incidence and reflection on the sensor and substrate may not be normal, which is unfavorable for our alignment scheme. Because the single Bessel mode in the fiber is very close to a Gaussian mode, we can use the well-known Gaussian mode divergence to get a very good estimate on the spreading of the signal wave during incidence and reflection [
21]. Specifically, the beam radius of a Gaussian beam at position
z along the propagation direction is
where
is the narrowest beam radius at
where the beam waist is located, and
is the Rayleigh range over which the cross-sectional area within the beam radius doubles.
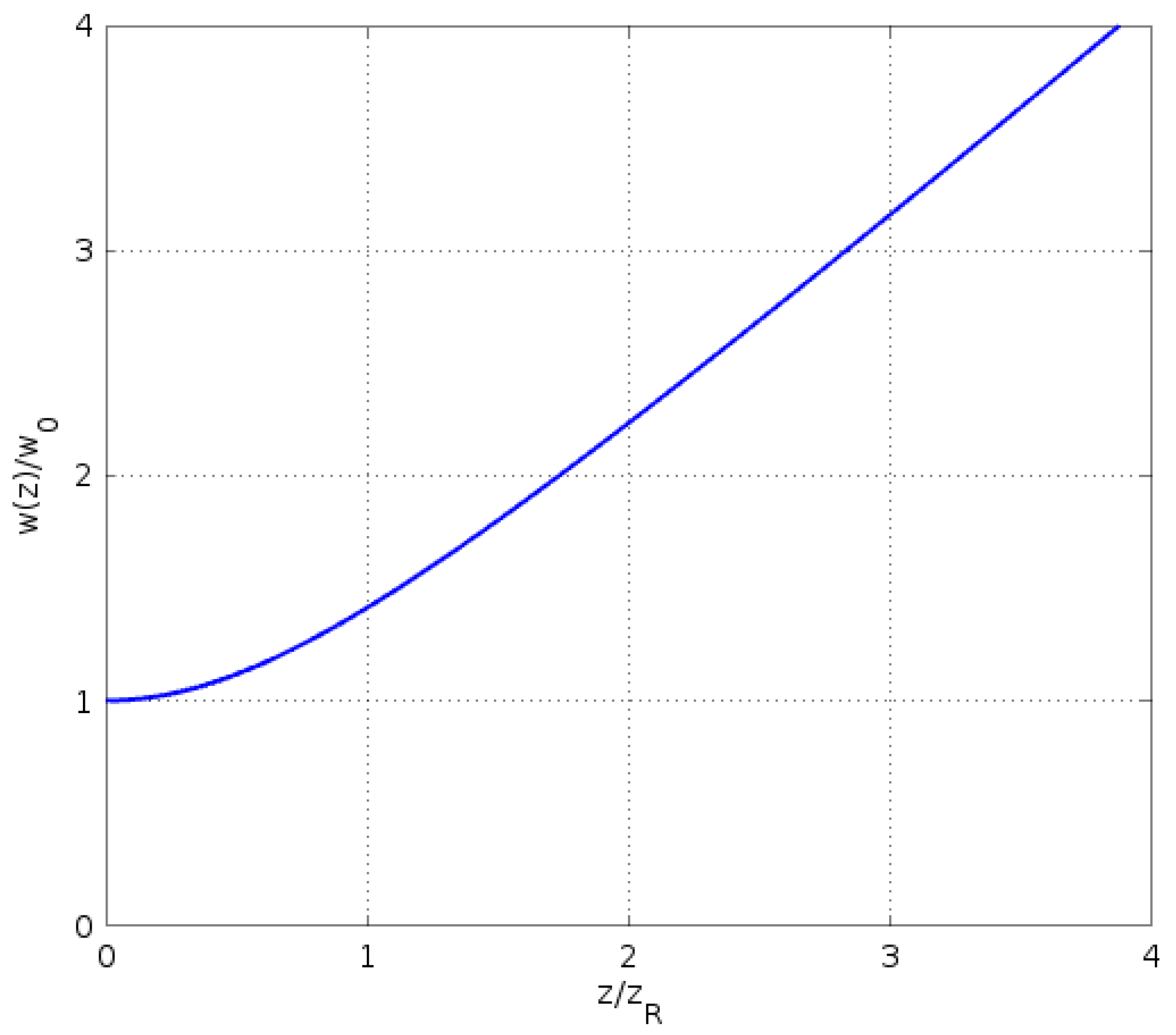
In
Figure 3, the beam radius in Equation (
10) is plotted. It can be seen that it increases linearly with
z at a large distance
, indicating that the beam diverges at a half angle of
in the far field. In the near field
, however, the beam radius changes little from the value at the beam waist,
. Consequently, if the distance
d between the fiber end and the sensor in
Figure 1a satisfies the condition
then the incidence and reflection of the signal wave on the sensor chip is normal. For the signal wavelength and fiber MFD used in our alignment system,
m. In the alignment, the fiber end is positioned only a few microns from the surface of the sensor chip, and the condition in Equation (
12) is very well satisfied. Therefore, the incidence and reflection of the signal wave can be considered normal to the chip surface, which is favorable for our alignment scheme.
2.3. Reflected Wave Intensity
As proved in
Section 2.2, when we position the fiber end from the surface of the sensor chip at a distance much smaller than the Rayleigh range, the incidence and reflection of the signal wave are normal to the chip surface. The propagation of the light beam between the fiber end and the sensor, as well as its coupling back into the fiber, can be treated without divergence. At such a small distance, the sensor is blocked from the microscope view by the fiber when we observe from the front side of the chip. We must rely on the intensity of the reflected wave to determine if the sensor is aligned with the fiber output. To explain quantitatively how this is possible, we use the simple model in
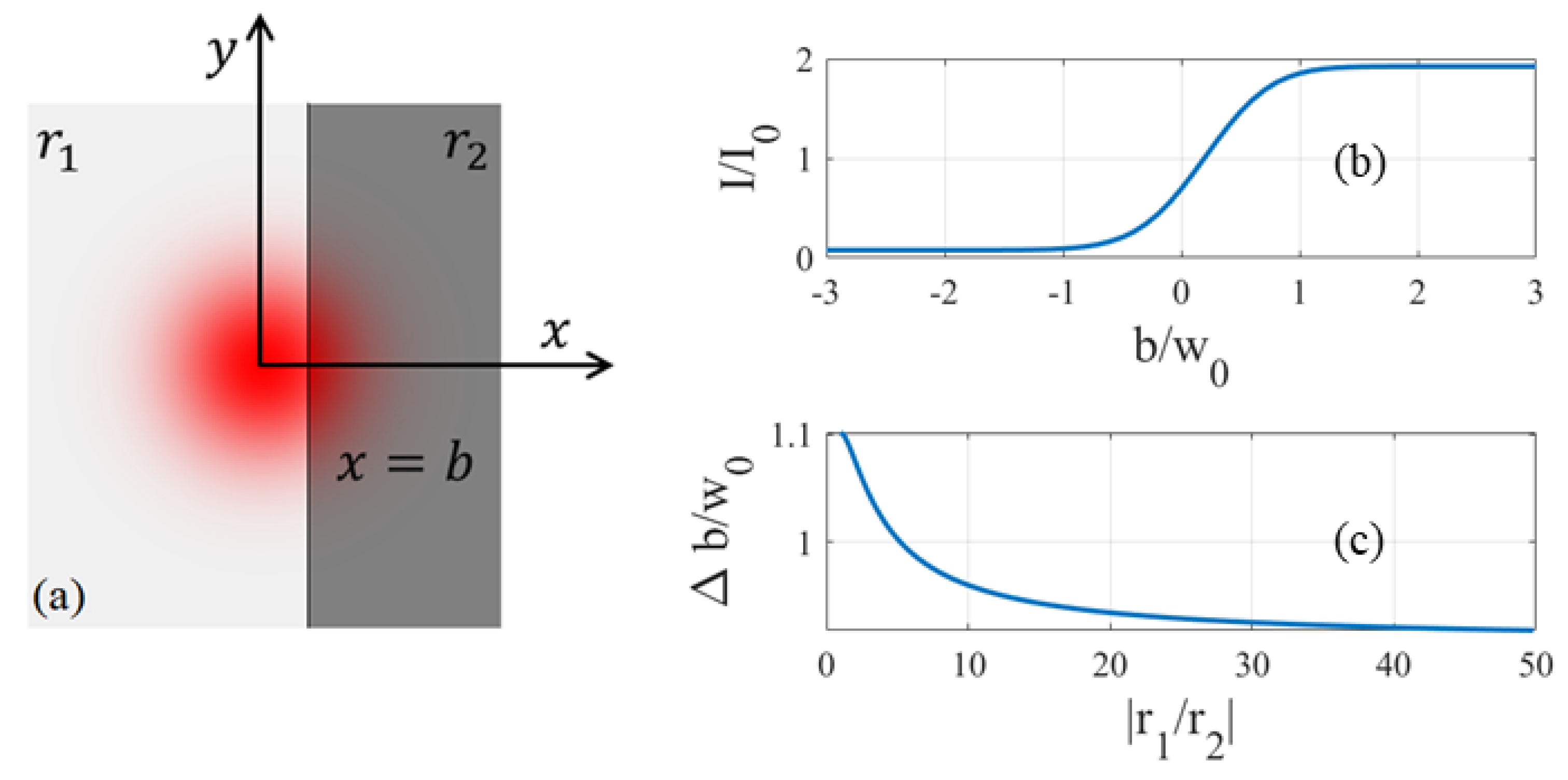
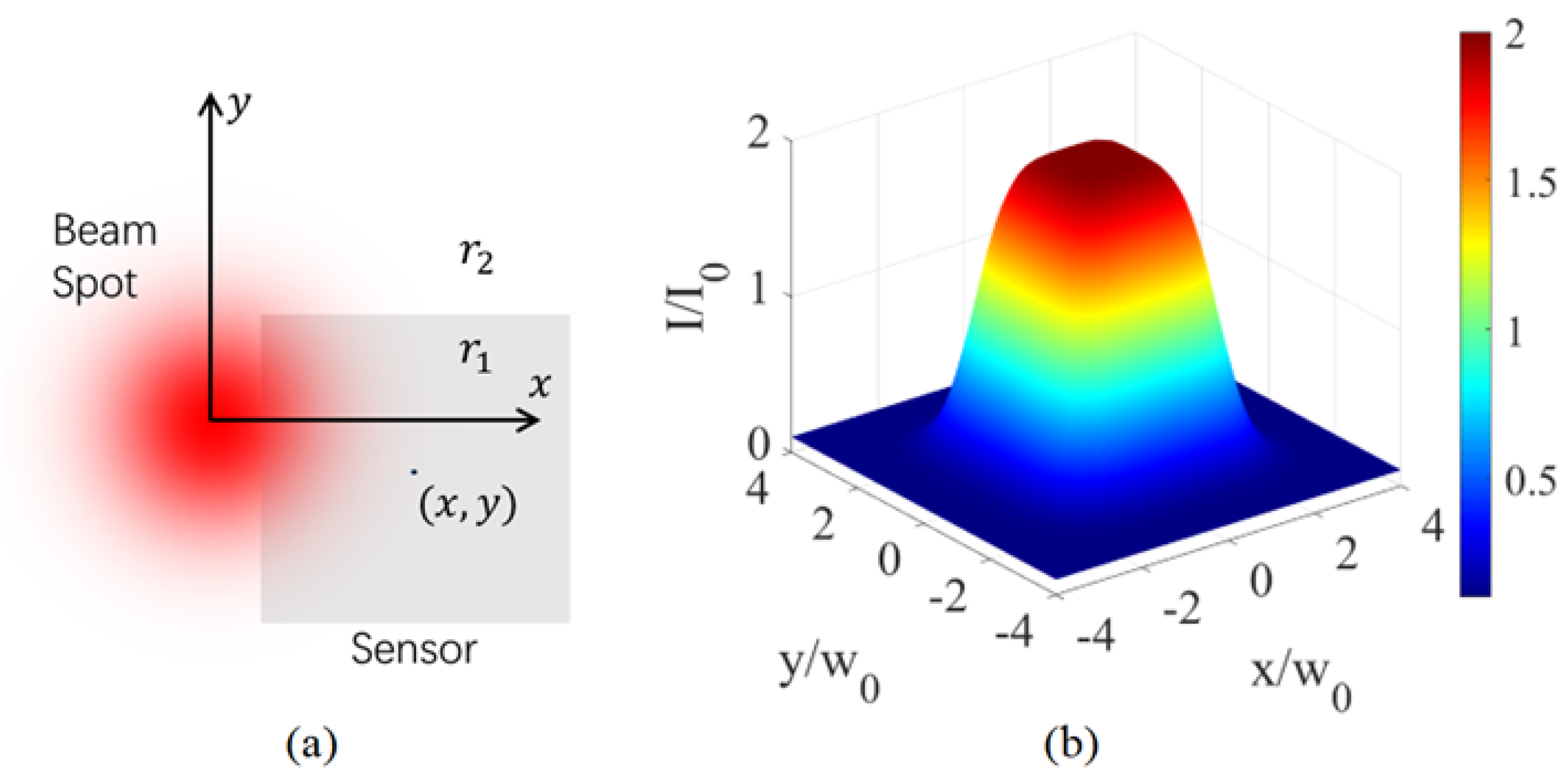
Figure 4a to study the change in the intensity of the reflected wave when the beam spot of the fiber moves across the boundary between two regions of different reflectivity on the sensor chip. In
Figure 4a, the line at
separates the two regions that extend infinitely in the
y direction. When we move the fiber parallel to the
plane in an alignment procedure, its beam spot may fall in either region, or partially in both regions, depending on the value of
b which characterizes how far the beam center is from the boundary between the two regions. Assuming a Gaussian output
from the fiber and normal incidence and reflection on the surface of the sensor chip, we can calculate the reflected field when it arrives at the fiber end as follows,
where
and
are the amplitude reflection coefficient in both regions, and
is the step function. The reflected wave
in Equation (
13) is no longer a Gaussian mode as long as
. Consequently, it cannot fully couple back into the single-mode fiber. Only the portion in the same profile with the single mode in the fiber, approximated by the Gaussian mode in Equation (
9), can enter the fiber in the opposite direction and propagate to the power meter which measures its intensity. The rest is lost due to mode mismatch. Therefore, the intensity
I of the reflected wave that couples back into the fiber can be obtained by calculating the overlap between the reflected field
and the fiber mode
, i.e., the probability of
being in
. We have
where
is the error function. In deriving the reflected wave intensity in Equation (
15), we have neglected the reflection at the fiber end when the light exits and couples back into the fiber. This reflectivity is only a couple percent and does not have a material impact on the conclusions of our analysis. For materials involved in TES devices, the phase of the reflection coefficient is close to
. For simplicity, we then assume
and
are in phase in subsequent studies.
In
Figure 4b, the intensity of the reflected wave is plotted as a function of
b for a 5-time difference in the amplitude reflection coefficient between the two regions. We see that the intensity of the reflected wave is a constant when
is large. In this case, the beam spot is located entirely in one of the two regions and the intensity of the reflected wave is determined by its reflectivity,
or
. We can tell which region the beam spot is in by measuring the reflected wave intensity. A larger difference in the reflectivity increases the contrast
between the reflected wave intensity in the two regions. When
is comparable to
, in contrast, the boundary between the two regions is so close to the beam center that the light shines on both regions. In this case, the light beam is reflected by both regions and the intensity of the reflected wave changes from the value in one region to that in the other over a range comparable to
. By sweeping the beam spot across the two regions and observing the change in the reflected wave intensity, we can determine the location of the boundary line with uncertainty up to the transition width of the reflected wave intensity in
Figure 4b. Without loss of generality, we assume
, and denote the intensity of the reflected wave in the two regions
and
. If we define the transition width
in
Figure 4b by the difference between
, the value at which
I is within
of
, and
, the value at which
I is within
of
, we have
with
The values for
,
, and
can be obtained by solving these equations numerically. In
Figure 4c, we plot the calculated values of
as a function of the ratio between
and
. It is seen that the transition width is comparable to
, which is a manifest of the fact that the variation in the reflected wave intensity is dictated by the intensity profile of the optical mode in the fiber. It has a weak dependence on the ratio
. In the high-contrast limit characterized by a large disparity between the reflectivity in both regions, it approaches a constant value of
For the fiber used in our alignment which has an MFD of about 9.2 m at a wavelength of 1310 nm, m.
The analysis based on the model in
Figure 4a can be generalized to an enclosed area such as a sensor which has a different reflectivity than the substrate and other surrounding structures, as shown in
Figure 5a. By the same argument that leads to Equation (
15), we can write the intensity of the reflected wave as follows,
where
and
are the amplitude reflection coefficient of the sensor and substrate and the two integrals are performed over the sensor and substrate area, respectively. Obviously, the result depends on both the separation between the sensor and the beam spot and their relative orientation. Unlike in
Figure 4a, the shape of the overlap between the sensor area and the beam spot can be irregular and the intensity of the reflected wave cannot be evaluated analytically. Nonetheless, we can calculate it numerically as a function of the mismatch between the beam center and the center of the sensor.
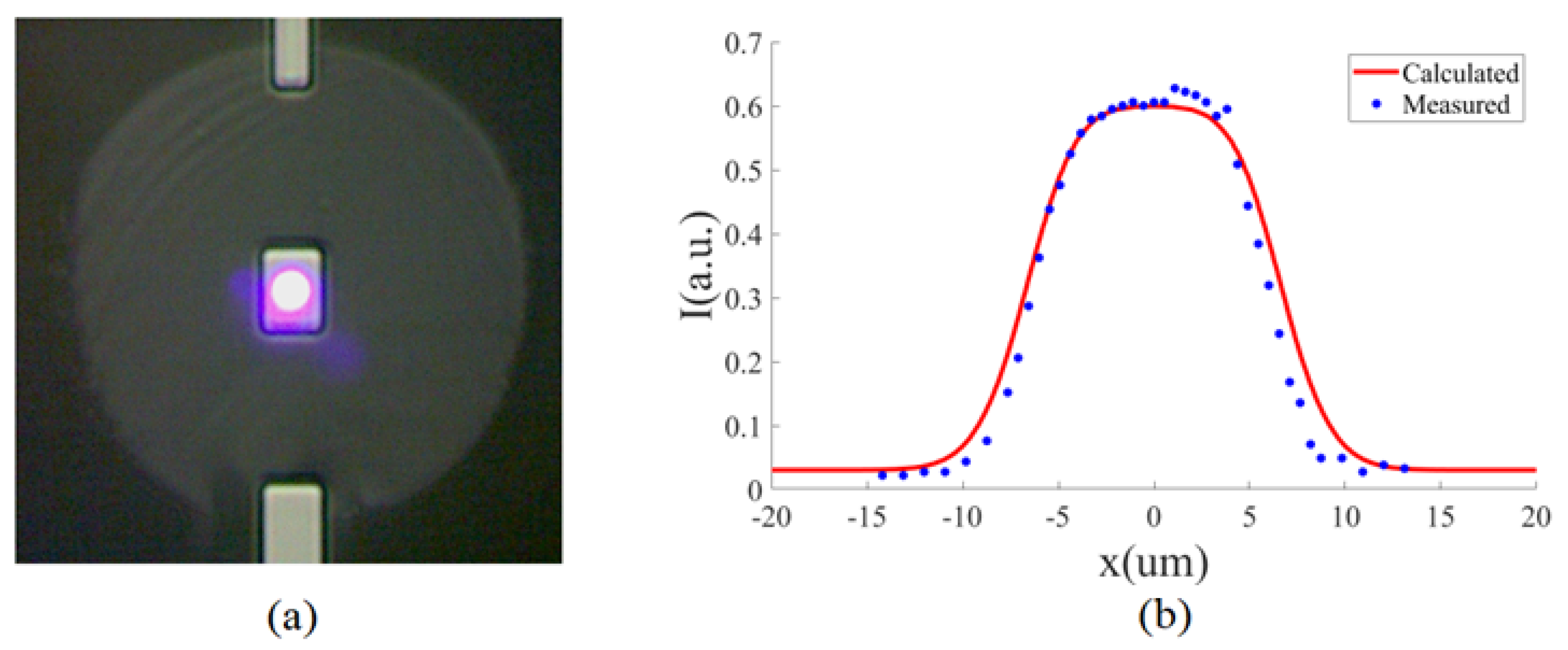
In
Figure 5b, the reflected wave intensity of a square sensor obtained by numerical calculation based on Equation (
20) is plotted as a function of its misalignment with the beam center. We see that the intensity of the reflected wave jumps along the perimeter of the sensor due to the different reflectivity of the sensor and substrate. The transition width is comparable to
as in Equation (
19). By moving the fiber in the vicinity of the sensor and observing the change in the reflected wave intensity, we can infer how well the sensor is aligned with the fiber output. As long as the size of the sensor is comparable to or larger than
, the MFD of the single-mode fiber, there is a range for the fiber position within which the reflected wave intensity approaches the value when the beam spot is reflected entirely by a film in the sensor material. Within this range, the reflected wave intensity stays nearly constant because almost all light is reflected by the sensor. The sensor can then be aligned with the fiber by adjusting the fiber position to within this range using a translation stage. Notice that, in order for the sensor to receive most light coming out of the fiber which is necessary for realizing a high DE, the sensor must be larger than the MFD of the fiber to cover the area where most of the light energy falls. It is always possible to use our method to align such a sensor.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









