1. Introduction
In the wireless localization system, when non-line-of-sight (NLOS) propagation occurs between the target and localization station, deviation of the angle-of-arrival (AOA) or time-of-arrival (TOA) can occur due to the effect of terrain, barrier, and geography, which is called a NLOS error. NLOS and multi-path interference are the major error sources in positioning [
1]. NLOS errors are becoming an increasingly serious issue due to the rapid expansion of cities and the increasing number of buildings and flat surface reflectors [
1,
2]. NLOS errors have far-reaching implications. They not only affects the value of the time delay, but they also have a severe impact on the values of the angle and power, which has become the main issue that restricts localization accuracy. In addition, the signal arriving at the receiver antenna can arrive through multi-paths (reflection, refraction, scattering, etc.), and the superposition of those signals can produce multi-path fading. This can lead to a decrease in signal strength, as well as a distortion of the signal waveform. The traditional time delay estimation algorithm struggles to distinguish the multi-paths, and leads to measurement errors when the difference in arrival times of the multi-paths is slight. Multi-paths and NLOS errors lead to serious interference, especially in the urban environment, where multi-paths can create Rayleigh fading, severely affects the quality of communications, and, even worse, the accuracy of timing and ranging measurements [
3]. Multi-path effects and signal blockages in an urban canyon can also lead to the inaccuracy and unavailability of global navigation satellite systems [
4]. Doppler frequency offset estimation is also disturbed by multi-path interference, leading to carrier phase perturbations [
5]. As multi-path interference is present in most localization scenarios, it severely affects the accuracy of positioning.
Currently, there are two approaches for reducing the NLOS error in localization algorithms. The first approach considers the NLOS error as the solution of the localization algorithm when either the target is moving slowly with slow environmental changes or when the target is moving quickly with short measurement time. The second approach models the observed signals and NLOS error as a specific probability distribution, such as exponential, uniform, Gaussian, or delta distribution, depending on the channel condition. Research on NLOS errors is divided into two categories: NLOS identification, and mitigation without identification. The first category aims to detect and identify the presence of an NLOS error in the received signal. Once the NLOS error is identified, it can be mitigated by using an algorithm. For example, Wylie proposed a detecting algorithm based on the standard deviation of noise [
6]. In another study [
7], a Markov chain model of LOS/NLOS based on the assumption of NLOS intermittency was developed to identify and mitigate NLOS errors. An NLOS identification and mitigation algorithm based on the distributional characteristics of NLOS was proposed in [
8], with the correctness of the results having a directly impact on the performance of NLOS error mitigation algorithms. The second category focuses on mitigating the effects of NLOS errors using the corresponding algorithms by taking advantage of their characteristics rather than identifying their presence. For example, the authors in [
9] proposed a semidefinite programming-based algorithm to mitigate the NLOS error without the requirement of NLOS information or identification of the NLOS error.
For ground-based NLOS scenarios, the location of reflectors (e.g., tall buildings, mountains, trees) is invariable. Thus, geographical information data or building data can be introduced to algorithms as reflectors to assist in positioning, increasing the available target location information, which can improve localization performance. In order to improve the localization accuracy, we need to fully account for the errors existing in the localization model. In practical applications, the position of the reflector may have errors, especially the uncertainly of the target position and status, which makes the position of the reflection points on the same reflection change over time. To address this issue, it is necessary to further integrate array metadata, multi-path data, and other information for joint optimization. Information fusion from multi-sources can be used to prove the accuracy of channel estimation by combining information from the spatial domain. By taking advantage of the fusion information, the algorithm can be optimized to better detect and locate signals in a real-world environment. Researchers have explored information fusion from multiple sources (e.g., energy domain, time domain, frequency domain, spatial domain) to enhance accuracy in complex wireless communication environments [
10]. This paper proposes a novel spatial multi-path information fusion localization algorithm in ground NLOS environments. The main contributions of this paper are summarized as follows:
We present a spatial multi-path array fusion model. The mathematical model is constructed under the assumption of a single reflection scenario, where the positions of the localization station and reflector are known.
An AOA/TOA optimal joint localization algorithm for ground NLOS situations is proposed. To improve the localization accuracy, we comprehensively use the fusion information. By decomposing the signal noise subspace, the proposed algorithm fuses the multi-data from the path with array element and geospatial data.
Cramer–Rao Lower Bound (CRLB) was derived and used to compare the proposed algorithm with other localization algorithms, and the results shows that our algorithm achieves better estimation performance.
To validate the effectiveness of the proposed algorithm, we conducted simulations under different numbers of array elements and reflection paths. The results reveal that the proposed algorithm has excellent ability to measure multi-array data and has effective information fusion capability.
The rest of this paper is organized as follows: the related work is described in
Section 2; in
Section 3, a mathematical model for spatial multi-path array fusion localization is constructed;
Section 4 implements a localization algorithm that fuses path, array element, and geospatial multi-data based on the signal-noise subspace decomposition method;
Section 5 provides the CRLB for the proposed algorithm to further analyze the localization performance, with the effectiveness of the algorithm verified through simulation experiments described in
Section 6; a discussion of the proposed algorithm is presented in
Section 7; and finally,
Section 8 concludes the paper. The notations are used in this paper are shown in
Table 1.
2. Related Work
Researchers have investigated various localization algorithms to mitigate the negative effects of NLOS transmissions. These studies are primarily focused on suppressing or eliminating the adverse effects of non-direct paths. AOA and TOA are two common key factors in localization technologies, and many scholars have studied the related methods to eliminate the NLOS error based on those two factors. A new localization algorithm based on AOA was proposed in [
11]. This algorithm uses a Bayesian probabilistic framework to estimate the target location, models the angle error as a Gaussian distribution, and performs NLOS error correction on AOA measurement. Research of TOA-based NLOS mitigation algorithms are aimed at mitigating the effects of NLOS errors on TOA measurement. One of the studies [
12] advanced the TOA NLOS mitigation cooperative localization algorithm based on a topological unit, which has higher scalability and robustness, and can obtain the target node with fewer anchor nodes. Another study [
9] proposed the TOA measurements localization algorithm, which uses a semidefinite programming problem to mitigate NLOS errors without the statistical information of the NLOS error. Additionally, other methods using mathematical models or filter technology have also achieved the aim of mitigating the effect of NLOS. The author in [
13] presents a NLOS mitigation algorithm that employs an equality-constrained Taylor series robust least squares method to mitigate error, which does not depend on much prior environment knowledge. A linear regression model based on hybrid filtering techniques is used to estimate and correct NLOS errors in a localization algorithm proposed by another study [
14]. The expression model of the error caused by NLOS and the covariance of the location error was established in [
15] using small error analysis, to estimate the multi-path effect. However, while these methods effectively handle NLOS errors, they also lose the location information contained in the multi-path propagation of the signal.
In a wireless localization system, the target location information exists not only in the direct path signal but also in the non-direct path signals. Therefore, it is necessary to explore multi-paths to obtain additional useful information regarding the location [
16]. Multi-path assist positioning is a technique that uses signal propagation characteristics to estimate distance and angle. Xie indicates that multi-path signals reflect the geometry information and target location, and proposed a localization method based on the collaboration of multiple base stations [
17]. Multi-path signal information is also be used in [
18] to develop a searching algorithm to estimate the location of the target, and the simulation result in the actual environment shows that the median location error is about 1.5. A further study [
19] proposed a multipath-assisted localization method, considering the scattering as Gaussian distribution in NLOS environments, using AOA and information from multi-paths to calculate the scatterers with different weights, and finally, optimizing the localization objective function and obtaining the final result of the estimated position. Multi-path data still has some limitations, and they may not be sufficient to support information accuracy, because the number, distribution, and strength of the signal may vary with environmental changes. Therefore, it is necessary to fuse more data to assist positioning.
Data fusion has become a popular topic in recent research in the wireless localization field as single domain information is unable to meet the increasing demand for accuracy. An information fusion method was proposed in reference [
10] that utilized a maximum likelihood estimator based on energy, time, and frequency domain fusion to precisely estimate the localization of the target. The combination of spatial and time parameters is also an active research area for target localization. The author of [
20] used multi-sensor combined received signal strength (RSS), AOA, and TOA for single target localization, and optimized sensor placement strategies to obtain the best estimate result. The time difference of arrival (TDOA) and AOA fusion algorithm were developed in [
21] by introducing a constrained total least squares framework. The proposed algorithm had better performance in both localization accuracy and robustness. The target position was estimated in [
22] using multi-source information fusion in 6G location-based services via Gaussian kernel density estimation. Multi-source RSS information was merged in line with Dempster–Shafer evidence theory, and the ideal reference points were chosen as the target position. This method has advantages in processing incomplete RSS information. A multi-source information fusion algorithm was also proposed in another study [
23]. Information from sensors and geometric data of the building were fused, and an adaptive complementary filtering algorithm was used to obtain the estimated information, which contributed to a higher accuracy of orientation. A fusion of pedestrian dead-reckoning (PDR) and ultra-wideband (UWB) was utilized in [
24] based on incremental smoothing. Additionally, the relative merits of the Huber kernel and Tukey kernel were compared, and the proposed method achieved high-accuracy positioning under NLOS conditions. Angular and distance information were combined for localization in [
25] to evaluate single base station positioning performance in a practical environment. The TOA information in the 4G network rounding reference signal was used to estimate the distance, and the AOA information was obtained using the multi-signal classification (MUSIC) algorithm. The results showed a median location error of around 2 m. The author in [
26] demonstrated that estimates of the position of an unknown node can be determined using data fusion of AOA and path loss. The bandwidth of 800 MHz showed better localization performance with the proposed algorithm.
Other studies [
27,
28,
29] have shown that data fusion combined with RSS can enhance overall positioning performance. Machine learning was used as a solution in [
27], where the proposed neural network model obtained better localization performance by fusing the position data in GNSS and user equipment position from RSS. The results showed the localization error was reduced by up to 49%. Direction of arrival (DOA) and TOA were fused with RSS by the authors in [
28], and an iterative algorithm using RSS and TOA was used in [
29]. The non-convex estimation problem was converted into a generalized trust region subproblem to solve the problem in directional target localization in NLOS environments.
3. Spatial Multi-Path Array Fusion Localization Model
In this section, we present the spatial multi-path array fusion localization model, which is used to construct a mathematical model of the received signal, including the AOA and TOA information of the signal, to improve localization accuracy.
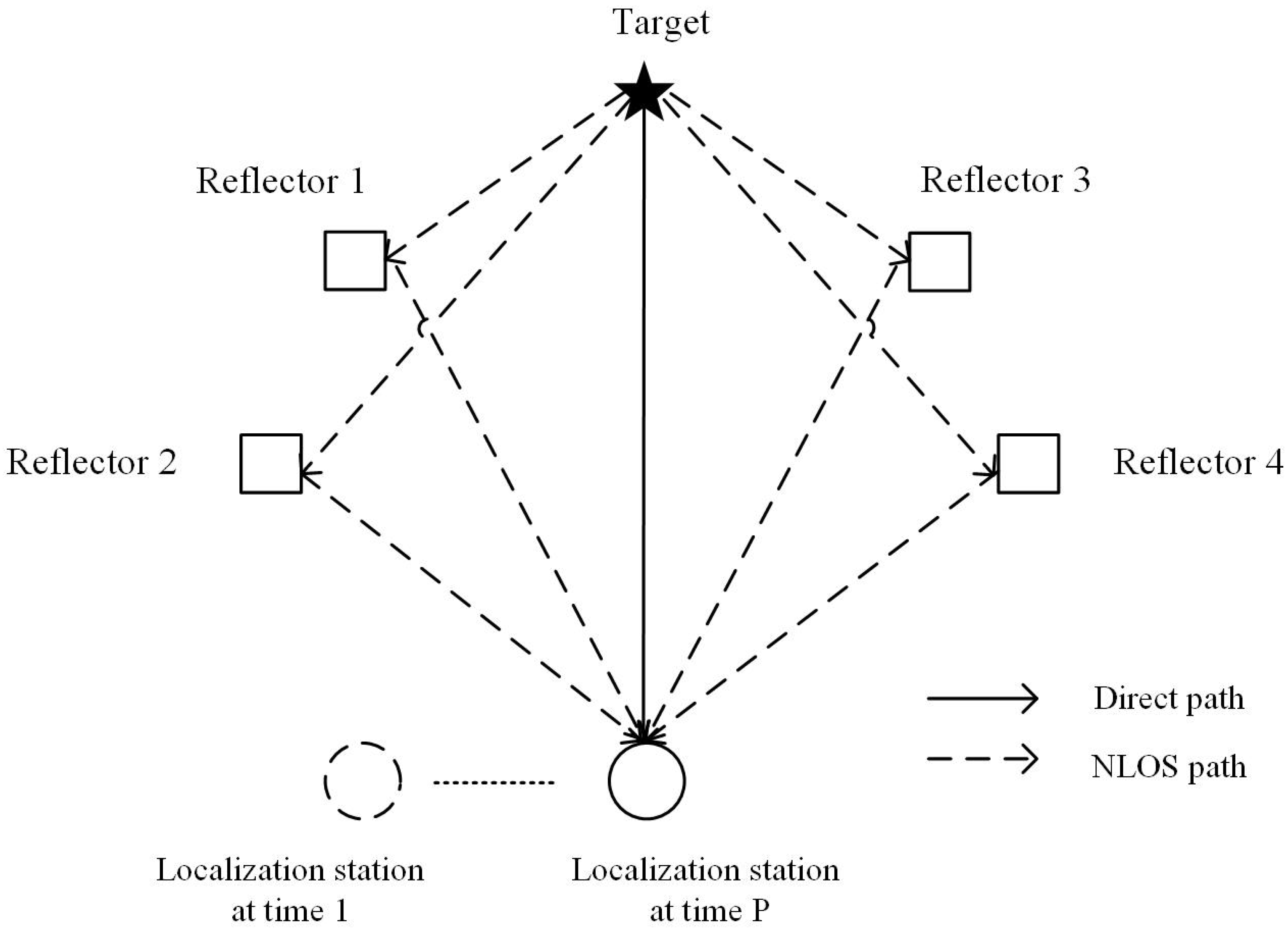
Signal attenuation can occur in a NLOS environment where the signal is being reflected off of obstacles, such as walls, trees, and buildings. With each reflection, the signal experiences a decrease in power, resulting in a weaker signal at the receiver that may be too weak to observe. Hence, this paper focuses on the multi-path localization scenario with a single reflection, as shown in
Figure 1, where the signal reflects only once for each reflector. In this scenario, if the reflector is far from both the target and the localization station, the distance is much greater than the wavelength of the signal. In this case, the reflector appears as a single point in the localization system, and the reflector’s size and shape have a negligible effect on the signal. Therefore, the reflector’s position can be used in the location calculation, instead of the reflection point of the electromagnetic wave. This approach simplifies the localization process. In practical applications, the reflector position can be obtained through measurement or by referring to a geographic information system (GIS).
The construction of a multipath signal reception model is an important step in developing accurate localization algorithms for NLOS environments. In the case of considering the reflector as a point, the multi-path signal reception model can be constructed as follows.
Assume that the localization station consists of a linear array of
elements, and the distance between every array element is
. The localization station receives the target signal
times, the coordinate of the localization station is
. The model assumes that the target signal reaches the localization station through one direct path and
reflection paths. The reflection point coordinate of each reflection path is
, and the coordinate of the target to be estimated is
, therefore, the received signal
of the localization station at
time can be expressed as follows:
where the parameter with subscript
indicates the relevant parameter of the
th target path,
represents the direct path;
is the channel plural fading factor of the
th path;
is the angle of incidence of the
th path;
is the time delay of the
th path;
is the launch time of the target;
is the target transmit signal;
indicates array manifold vector of the localization station; and
is uncorrelated zero-mean Gaussian white noise with variance
.
Suppose the total reception time of the signal is
and divide it into
parts, where each part has a length of
. By taking a sample at each part with a period of
, a total of
sampling points can be obtained. Hence, Equation (1) can be expressed as:
Taking the Fourier transform to
for every
K part, and adding the time delay information, gives us:
where
and
represent the Fourier coefficients of the signal and noise, respectively. Substituting Equation (2) into Equation (3), we obtain:
Equation (3) can be represented as:
where:
By constructing this multi-path signal reception model, the proposed algorithm in the next section can estimate the location of the target using the received signals, the known position of the localization station, and the position of the reflector. This model serves as a basis for developing the proposed spatial multi-path array fusion localization algorithm.
4. Spatial Multi-Path Array Fusion Localization Algorithm
In this section, a novel localization algorithm for ground NLOS situations was proposed. The algorithm is based on a joint localization method that incorporates spatial information from multiple sources, AOA, and TOA to improve the localization accuracy.
Using conditions in which the reflector point model considers the reflector as a point, there is an unknown bias
between the measured position of the reflector and its actual position. The bias is caused by the fact that the reflector is not a point, but rather a physical object with a finite size. As a result, the measured position of the reflector is not the same as its actual position. The actual coordinates of the reflector can be expressed as
. The bias
is called the point error. The angle and time delay parameters of the signal after reflect denoted as
and
, respectively, and they can be written as:
where
and
are the signal angle and time delay calculated from the measured value of the reflector position;
and
are the angle and time error caused by the point error. By incorporating Equation (7) into (2), the signal model with the error is obtained as:
It is assumed that the reflector is distant from the localization station and the target, and as a result the bias error of the reflector position is small, and
can be combined into the signal’s plural decay. Applying the Fourier transform to
gives us:
where
.
is the function that relates to the reflector angular bias error. The first-order Taylor series expansion is used under the assumption of small bias error, which can be represented as:
where
is the first order value of
when
. Combining Equation (10) with Equation (9),
can be expressed as:
Since
is irrelevant to the target location, the relationship between the time delay, angle parameter, and the target location are:
Combining Equation (12) with Equation (11), gives us:
Thus Equation (11) can be expressed as:
For the subspace-based fusion localization algorithm when the signal is unknown, the covariance matrix of the received signal is:
In this equation,
is a unit matrix and
is the self-covariance matrix of the signal. The subspace decomposition is performed on
to obtain the noise subspace
. Based on the orthogonality of the signal subspace and the noise subspace:
The target function can be written as:
where
. The estimated target location corresponds to the minimum value obtained from
. This can be expressed using the Rayleigh quotient:
where
is the minimum value of the matrix eigenvalues. By fusing the information of the location station from
moment, the final estimate position of the target can be expressed as:
where
is the target location and
is its estimated value. Equation (19) can be used to estimate the target location. There are two advantages to this equation. The first advantage of this equation is that it does not need to consider the effect of multi-path fading, which reduces the number of estimation parameters, simplifying the algorithm and making it more efficient. Secondly, the equation use the Taylor series expansion to mitigate the impact of reflector position bias errors. This aligns with the real-world localization environment that has small errors in reflector location.
A simulation experiment will analyze the performance of the algorithm and compare it with existing algorithms to prove its effectiveness of the algorithm.
The implementation of the proposed algorithm is described in
Table 2.
5. Derivation of the Cramer–Rao Lower Bound
In this section, we derivate the CRLB to further analyze the localization performance of the algorithm proposed in this paper. The CRLB is a theoretical lower bound on the variance of any unbiased estimator of a parameter, and it represents the best possible performance that can be achieved by any estimator.
Under the model that we proposed in the
Section 4, the parameter to be estimated can be set as:
where
represents the power of the signal. The Fisher information matrix (FIM) of the unknown parameters can be expressed as:
where
and
are the
th and
th parameter of the unknown vector. The covariance matrix of the received signal is expressed as:
Allowing
to represent the number
element of the matrix, and assuming the distance between every array element
equals a half wavelength, then:
where:
can be obtained in the same way. The expressions of the angle and time delay are different for the direct and non-direct paths. When
represents the direct path, there is:
The derivative for the multi-path attenuation of the target signal is:
where:
Only the
th element is 1 and the remaining are 0. Therefore:
where:
Given the above derivation, we can obtain the derivative for any element of . FIM can be obtained according to Equation (21), and thus we can express CRLB as:
The CRLB can be derived by calculating the inverse of the FIM, which provides a lower bound on the variance of any unbiased estimator of the target location. The CRLB can be used to compare the performance of different localization algorithms and to evaluate the efficiency of our proposed algorithm.
6. Algorithm Simulation and Verification
In this section, the performance of our proposed spatial multi-source information fusion localization algorithm (IFLA) is evaluated and compared to the traditional two-step localization algorithm. The traditional AOA/TOA localization algorithm is based on the least square method (ML_AOA/TOA), and estimates the location of a target by combining AOA and TOA information, and utilizes the multiple signal classification (MUSIC) algorithm for AOA parameter estimation and the maximum likelihood time-delay estimation algorithm for TOA parameter estimation [
30]. After obtaining the AOA and TOA parameters, the target localization is achieved through the least squares method [
30].
In the simulation, two targets are placed in the plan-coordinate system with coordinates of (500, 3500) m and (−2000, 2800) m. Three localization stations are placed at coordinates (−3000, −1000) m, (0, −1000) m, and (3000, −1000) m, to receive signals from the target. Additionally, two reflectors are located in the localization area with coordinates of (−4000, 1000) m, (4000, 1000) m. The simulation parameters include an initial number of array elements (7), the received signal divided into 32 segments with each segment having 16 sampling points, a signal carrier frequency of 1 GHz, and the sampling frequency of 0.5 MHz. The parameters described above are shown in
Table 3.
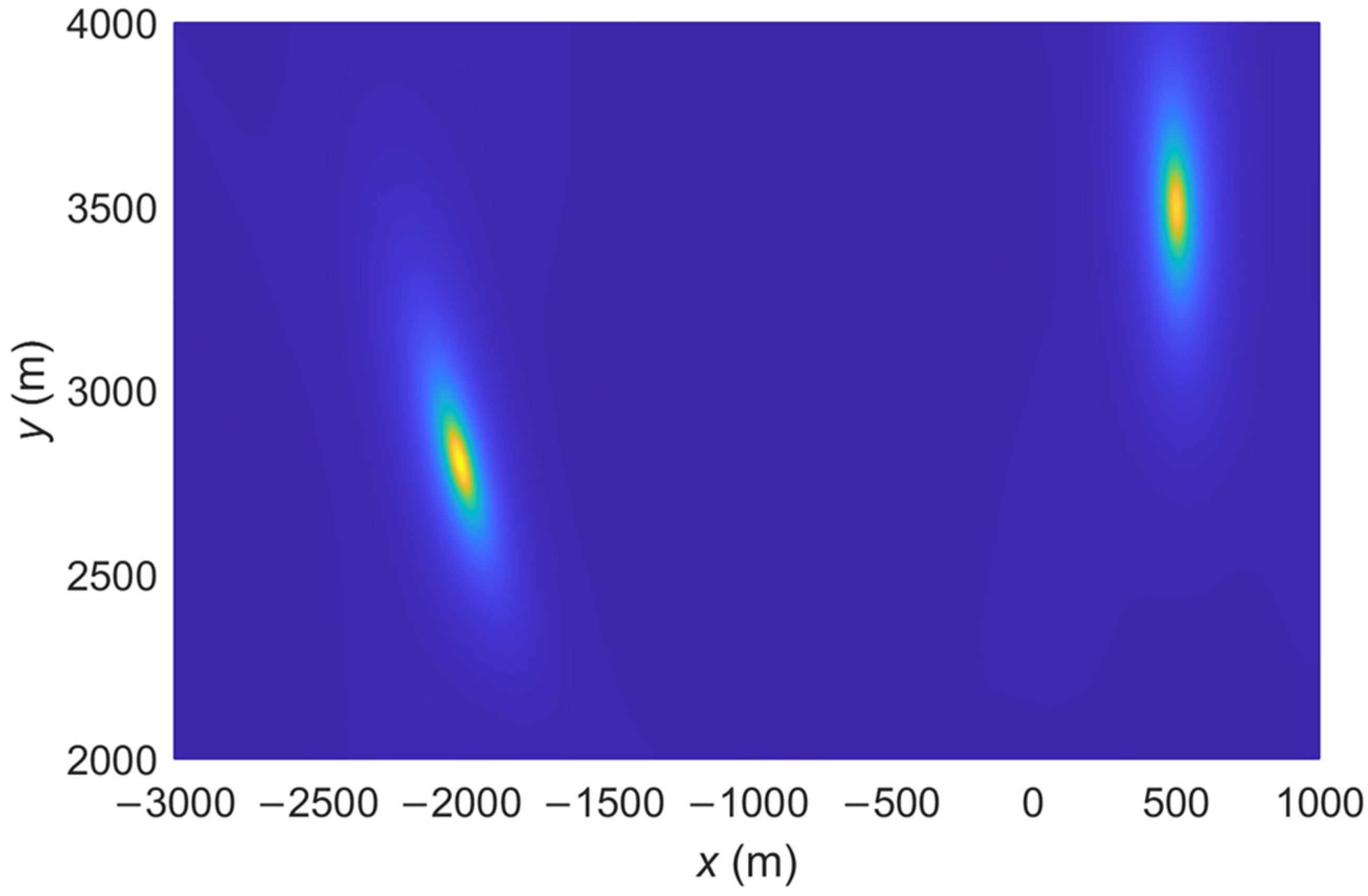
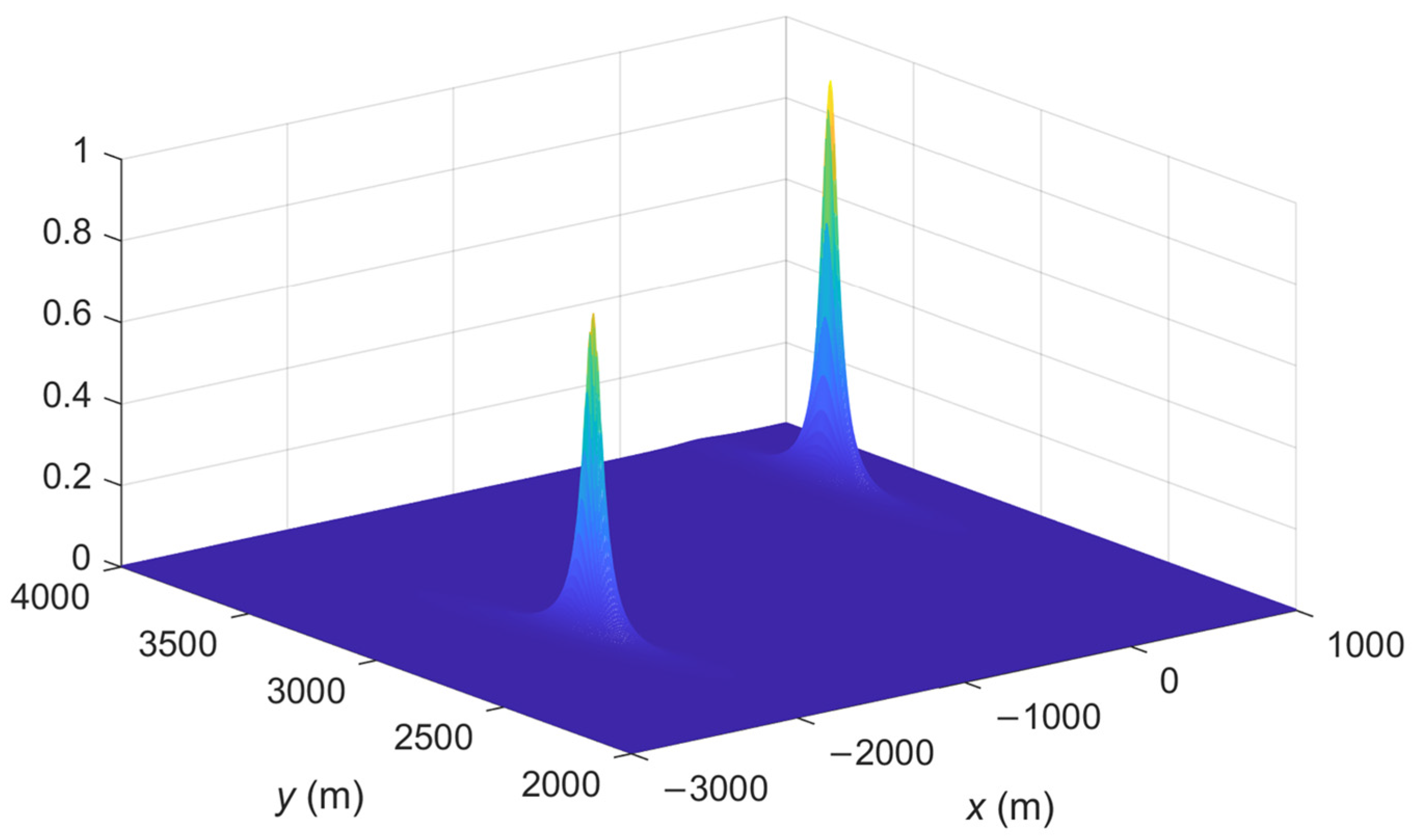
The spatial spectrum of the proposed IFLA algorithm and ML_AOA/TOA algorithm are compared. The spatial spectrum is a common tool used in signal processing to analyze and visualize the spatial spectrum to analyze the accuracy of a localization algorithm. A sharp peak in the spatial spectrum plot indicates that the signal has a strong spatial frequency component at that particular frequency. This can be interpreted as the presence of a spatial pattern or feature in the signal at that frequency. To demonstrate the effectiveness of the proposed IFLA algorithm,
Figure 2,
Figure 3,
Figure 4 and
Figure 5 shows the stereogram and top view of the spatial spectrum of both the IFLA and ML_AOA/TOA algorithms with a signal to noise ratio (SNR) of 0 dB. The simulation results indicate that the IFLA achieves a sharp peak at the true position of the target with a smaller fuzzy area, which indicates that IFLA has a higher localization accuracy compared to ML_AOA/TOA.
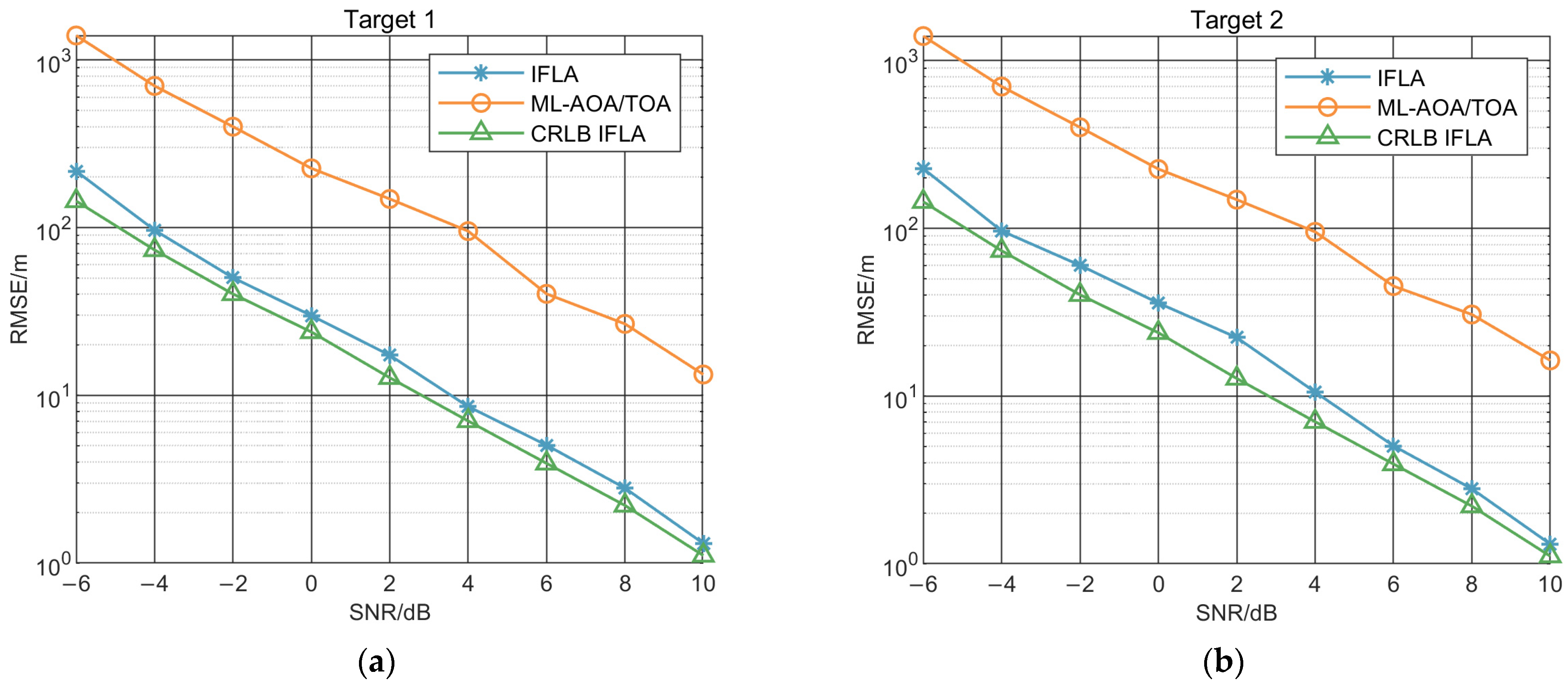
To further illustrate the performance of IFLA algorithms, we contrast the localization performance of each algorithm with their CRLBs. The CRLB and root mean square error (RMSE) of each algorithm were obtained through 500 Monte Carlo simulation experiments as a function of SNR. The SNR was calculated using the received signal power and the noise power, as shown in Equation (35). The formula for RMSE is show in Equation (36), where
is the number of Monte Carlo simulations,
represent the estimate value of the target and
represent the real value of it:
The results are presented in
Figure 6 and show that both IFLA and the ML_AOA/TOA improve with increasing SNR. However, the IFLA outperforms the ML_AOA/TOA throughout the entire range of SNR values. These results indicate that the IFLA algorithm is able to provide more accurate localization of the target.
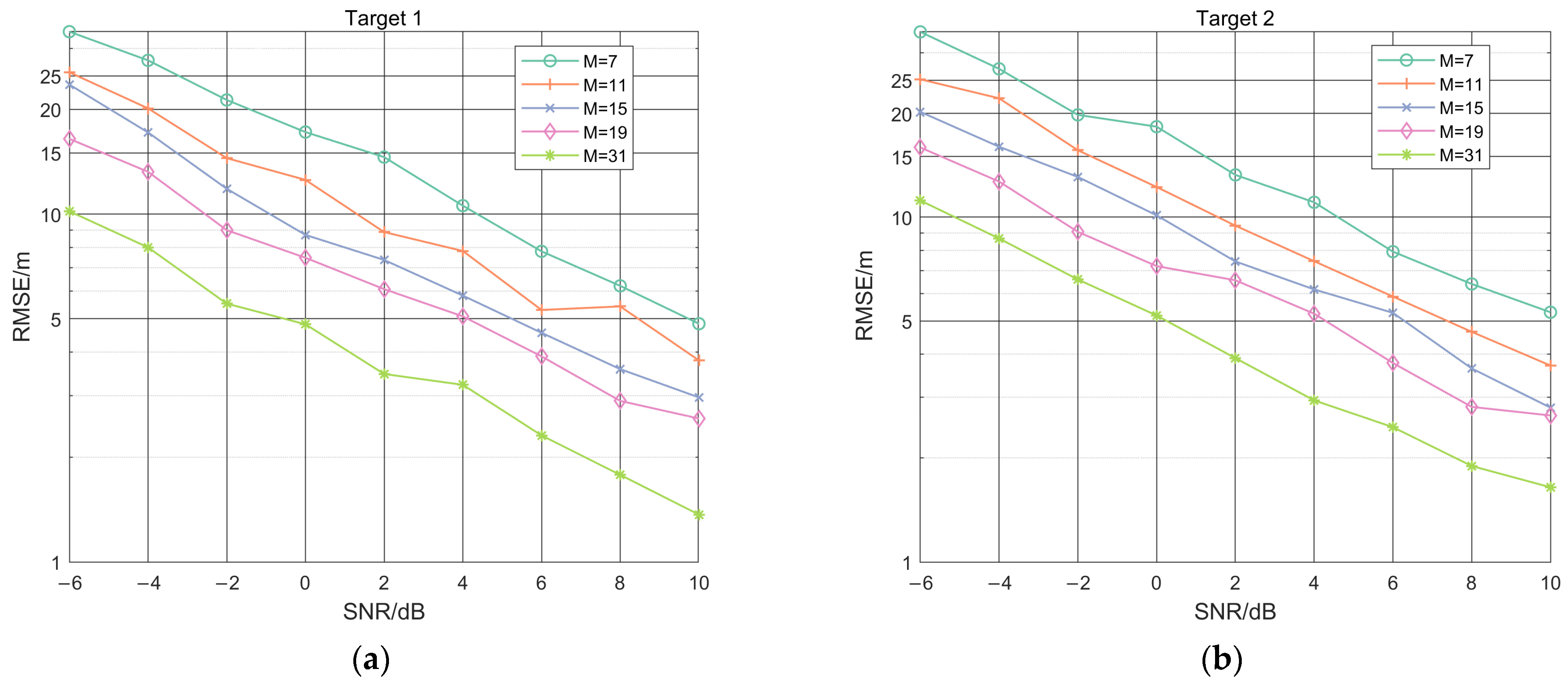
To verify the fusion localization performance of the IFLA for antenna array element data, and to further simulate the error under a different number of array element, IFLA was used to perform 500 Monte Carlo simulation experiments for different numbers of array elements (M), including 7, 11, 15, 19, and 31. The results in
Figure 7 show that when the value of SNR is constant, the RMSE decreases with the increase of the array element number, which indicates that the localization performance of IFLA improves as the number of array elements increases. This simulation also demonstrates the IFLA algorithm has effective information fusion capability for measuring multi-array element antenna data.
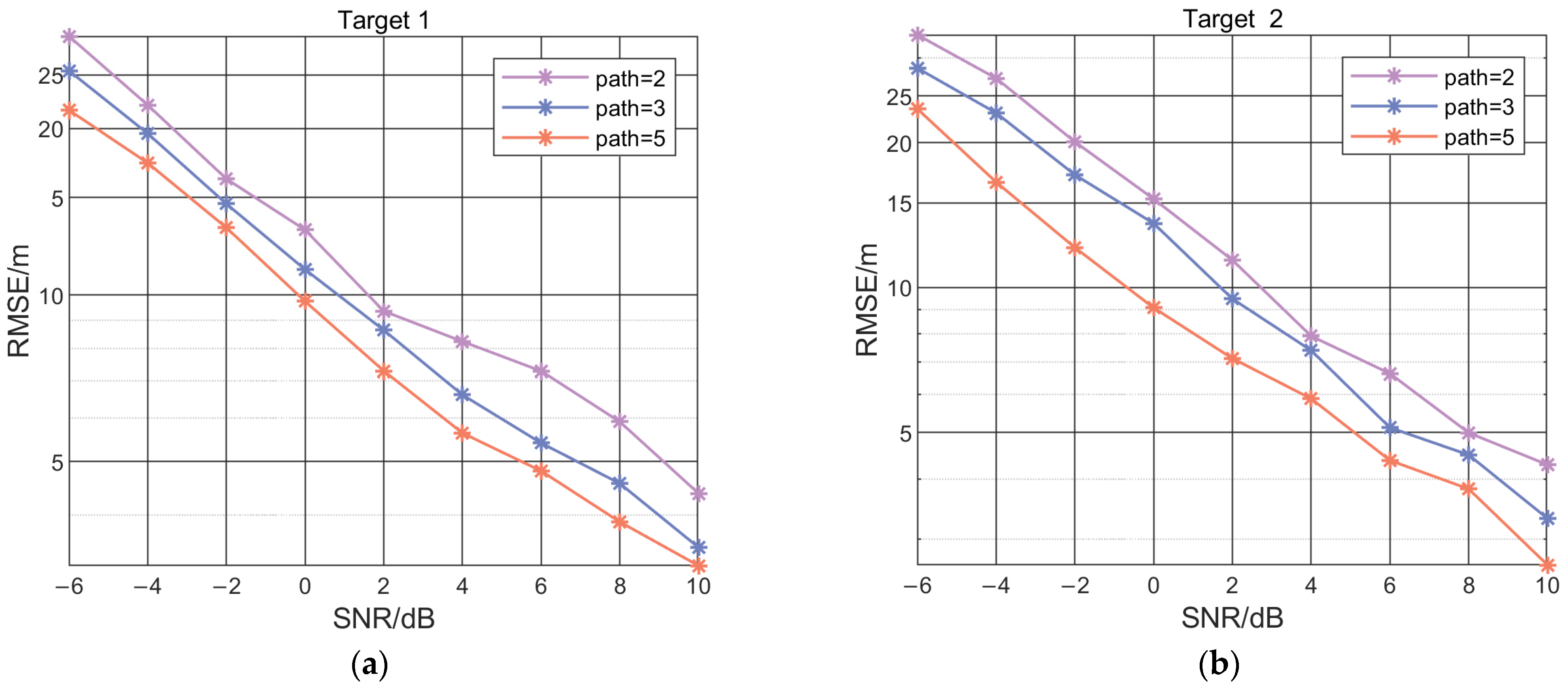
To verify the fusion localization performance of the IFLA for the number of spatial propagation paths, and to further simulate the error with a different number of signal paths, IFLA was used to perform 500 Monte Carlo simulation experiments with a different numbers of reflectors, represent as paths, including 2, 3, and 5 reflectors. The results in
Figure 8 shows that when the value of SNR is the same, the RMSE decreases with the increase of reflection paths, which indicates that the localization performance of IFLA improves as the number of signal reflection paths increases. This simulation results also demonstrate that the algorithm has effective information fusion capability for spatial signal multi-path data.
7. Discussion
In NLOS environments, traditional localization algorithms face challenges, such as multipath fading, signal attenuation, and interference, which degrade the accuracy of the localization process. Spatial multi-path information fusion has been proposed as a promising approach to address the challenges of NLOS localization. This approach fuses multi-array element antenna data and spatial signal multi-path data to improve localization accuracy. The IFLA algorithm proposed in this paper utilizes this approach and outperforms the traditional ML_AOA/TOA algorithm, and has effective information fusion capability for measuring multi-array element antenna data and spatial signal multi-path data. However, despite its advantages, the accuracy of the localization process is still restricted by various external factors. The complexity of the environment and the accuracy of prior environmental information, as well as the signal bandwidth, SNR, and data sampling time, can all affect the algorithm’s performance. Moreover, the IFLA algorithm is limited to recognizing only one target in a 2D plane and relies on assumptions about the environment, such as the existence of only one reflection path for one reflector. In the real-world scenarios, the presence of multiple targets may interfere with the target to be located, and the IFLA algorithm may not be applicable.
8. Conclusions
This paper presents a novel algorithm aimed at improving localization accuracy in ground NLOS environments. A spatial multi-path information fusion localization model is proposed by analyzing NLOS error mitigation localization algorithms. The model is further improved by incorporating path, array element, and geospatial multi-data using the signal noise subspace decomposition in a fusion localization algorithm. The CRLB of the algorithm is derived, which shows the localization accuracy is better compared with the existing traditional algorithm. Simulation experiments are conducted to verify the effectiveness of the proposed localization algorithm. The results show that the proposed method effectively leverages spatial multi-source information to achieve precise localization in complex ground environments and improves the locatable probability. This algorithm can be applied in various localization scenarios, such as indoor, complex urban environments, factories, underground tunnels, and other applications scenarios. Future research directions include investigating the 3D localization, multi-target scenarios, dynamic target scenarios, and studying the mutual influence between multiple targets and the localization station on the localization performance.
Author Contributions
Conceptualization, J.W.; methodology, J.W.; software, J.W. and J.L.; validation, J.W., J.L. and W.C.; formal analysis, J.W.; investigation, J.W.; resources, J.W., J.L. and Q.L.; datacuration, J.W.; writing—original draft preparation, J.W.; writing—review and editing, J.W., J.L., W.C. and Q.L.; visualization, J.L. and W.C.; supervision, W.C.; project administration, J.W. and J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by Grant No. 62171468 from National Natural Science Foundation of China.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available upon request from the authors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yuan, Y.; Shen, F.; Li, X. GPS multipath and NLOS mitigation for relative positioning in urban environments. Aerosp. Sci. Technol. 2020, 107, 106315. [Google Scholar] [CrossRef]
- Wen, W.W.; Zhang, G.; Hsu, L.T. GNSS NLOS exclusion based on dynamic object detection using LiDAR point cloud. IEEE Trans. Intell. Transp. Syst. 2019, 22, 853–862. [Google Scholar] [CrossRef]
- Yang, C.; Soloviev, A. Mobile positioning with signals of opportunity in urban and Urban Canyon Environments. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium, Portland, OR, USA, 20–23 April 2020; pp. 1043–1059. [Google Scholar]
- Wang, P.; Wang, Y.; Morton, Y.J. Signal tracking algorithm with adaptive multipath mitigation and experimental results for LTE positioning receivers in urban environments. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 2779–2795. [Google Scholar] [CrossRef]
- Dun, H.; Tiberius, C.C.J.M.; Janssen, G.J.M. Positioning in a multipath channel using OFDM signals with carrier phase tracking. IEEE Access 2020, 8, 13011–13028. [Google Scholar] [CrossRef]
- Wylie, M.P.; Holtzman, J. The non-line of sight problem in mobile location estimation. In Proceedings of the ICUPC-5th International Conference on Universal Personal Communications, Cambridge, MA, USA, 2 October 1996; pp. 827–831. [Google Scholar]
- Urruela, A.; Morata, H.; Riba, J. NLOS mitigation based on a trellis search for wireless location. In Proceedings of the IEEE 6th Workshop on Signal Processing Advances in Wireless Communications, New York, NY, USA, 5–8 June 2005; pp. 665–669. [Google Scholar]
- Ma, C.; Klukas, R.; Lachapelle, G. A nonline-of-sight error-mitigation method for TOA measurements. IEEE Trans. Veh. Technol. 2007, 56, 641–651. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, H. An Efficient NLOS Errors Mitigation Algorithm for TOA-Based Localization. Sensors 2020, 20, 1403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wan, P.; Yan, Q.; Lu, G.; Wang, J.; Huang, Q. Robust localization of signal source based on information fusion. IEEE Syst. J. 2020, 15, 1764–1775. [Google Scholar] [CrossRef]
- Zhang, Z.; Kang, S.; Zhang, X. A Bayesian Probabilistic AOA Localization Algorithm. In Proceedings of the 2020 IEEE 8th International Conference on Information, Communication and Networks (ICICN), Xi’an, China, 22–24 August 2020; pp. 96–100. [Google Scholar]
- Zhang, H.; Qi, X.; Wei, Q.; Liu, L. TOA NLOS mitigation cooperative localisation algorithm based on topological unit. IET Signal Process. 2020, 14, 765–773. [Google Scholar] [CrossRef]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A novel NLOS mitigation algorithm for UWB localization in harsh indoor environments. IEEE Trans. Veh. Technol. 2018, 68, 686–699. [Google Scholar] [CrossRef]
- Zhang, Z.; Hu, N.; Guo, Y.; Yang, X. The NLOS Localization Algorithm Based on the Linear Regression Model of Hybrid Filter. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 2442–2445. [Google Scholar]
- Picard, J.S.; Weiss, A.J. Direct position determination sensitivity to NLOS propagation effects on doppler-shift. IEEE Trans. Signal Process. 2019, 67, 3870–3881. [Google Scholar] [CrossRef]
- Kanhere, O.; Rappaport, T.S. Position location for futuristic cellular communications: 5G and beyond. IEEE Commun. Mag. 2021, 59, 70–75. [Google Scholar] [CrossRef]
- Xie, L.; Li, S.; Tian, Z.; Li, Z.; Wang, Y.; Wei, W.; Zhou, M. Indoor NLOS Localization Based on Collaboration of Multiple Base Stations. In Proceedings of the 2020 IEEE Asia-Pacific Microwave Conference (APMC), Hong Kong, Hong Kong, 8–11 December 2020; pp. 588–590. [Google Scholar]
- Li, Z.; Tian, Z.; Wang, Z.; Zhang, Z. Multipath-Assisted Indoor Localization Using a Single Receiver. IEEE Sens. J. 2021, 21, 692–705. [Google Scholar] [CrossRef]
- Liao, X.; Wang, S.; Wang, Y.; Che, Y.; Zhou, J.; Zhang, J. Multipath Cluster-Assisted Single Station Localization Based on SSA-GA in Outdoor NLOS Environment. Wirel. Commun. Mob. Comput. 2022, 2022, 8585978. [Google Scholar] [CrossRef]
- Xu, S. Optimal Sensor Placement for Target Localization Using Hybrid RSS, AOA and TOA Measurements. IEEE Commun. Lett. 2020, 24, 1966–1970. [Google Scholar] [CrossRef]
- Xu, Z.; Li, H.; Yang, K.; Li, P. A Robust Constrained Total Least Squares Algorithm for Three-Dimensional Target Localization with Hybrid TDOA–AOA Measurements. Circuits Syst. Signal Process. 2023, 1–25. [Google Scholar] [CrossRef]
- Zhou, M.; Li, X.; Wang, Y.; Li, S.; Ding, Y.; Nie, W. 6G multisource-information-fusion-based indoor positioning via Gaussian kernel density estimation. IEEE Internet Things J. 2020, 8, 15117–15125. [Google Scholar] [CrossRef]
- Liu, G.X.; Shi, L.F.; Xun, J.H.; Chen, S.; Zhao, L.; Shi, Y.F. An orientation estimation algorithm based on multi-source information fusion. Meas. Sci. Technol. 2018, 29, 115101. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Khoshelham, K. Comparative analysis of robust extended Kalman filter and incremental smoothing for UWB/PDR fusion positioning in NLOS environments. Acta Geod. Et Geophys. 2019, 54, 157–179. [Google Scholar] [CrossRef]
- Blanco, A.; Ludant, N.; Mateo, P.J.; Shi, Z.; Wang, Y.; Widmer, J. Performance evaluation of single base station ToA-AoA localization in an LTE testbed. In Proceedings of the IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; pp. 1–6. [Google Scholar]
- Kanhere, O.; Rappaport, T.S. Position locationing for millimeter wave systems. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 206–212. [Google Scholar]
- Klus, R.; Talvitie, J.; Valkama, M. Neural network fingerprinting and GNSS data fusion for improved localization in 5G. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–6. [Google Scholar]
- Li, J.; Lu, I.T.; Lu, J. Cramer-rao lower bound analysis of data fusion for fingerprinting localization in non-line-of-sight environments. IEEE Access 2021, 9, 18607–18624. [Google Scholar] [CrossRef]
- Zuo, P.; Zhang, H.; Wang, C.; Jiang, H.; Pan, B. Directional target localization in NLOS environments using RSS-TOA combined measurements. IEEE Wirel. Commun. Lett. 2021, 10, 2602–2606. [Google Scholar] [CrossRef]
- Wang, J.H.; Ba, B.; Yu, Z.L.; Kong, F.Z.; Cui, W.J. Theory and Method of Information Fusion Localization in Cellular Networks, 1st ed.; Publishing House of Electronics Industry: Beijing, China, 2019; pp. 78–122. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}