
Optimized Weight Low-Frequency Search Coil Magnetometer for Ground–Airborne Frequency Domain Electromagnetic Method

Abstract
:1. Introduction
2. Materials and Methods
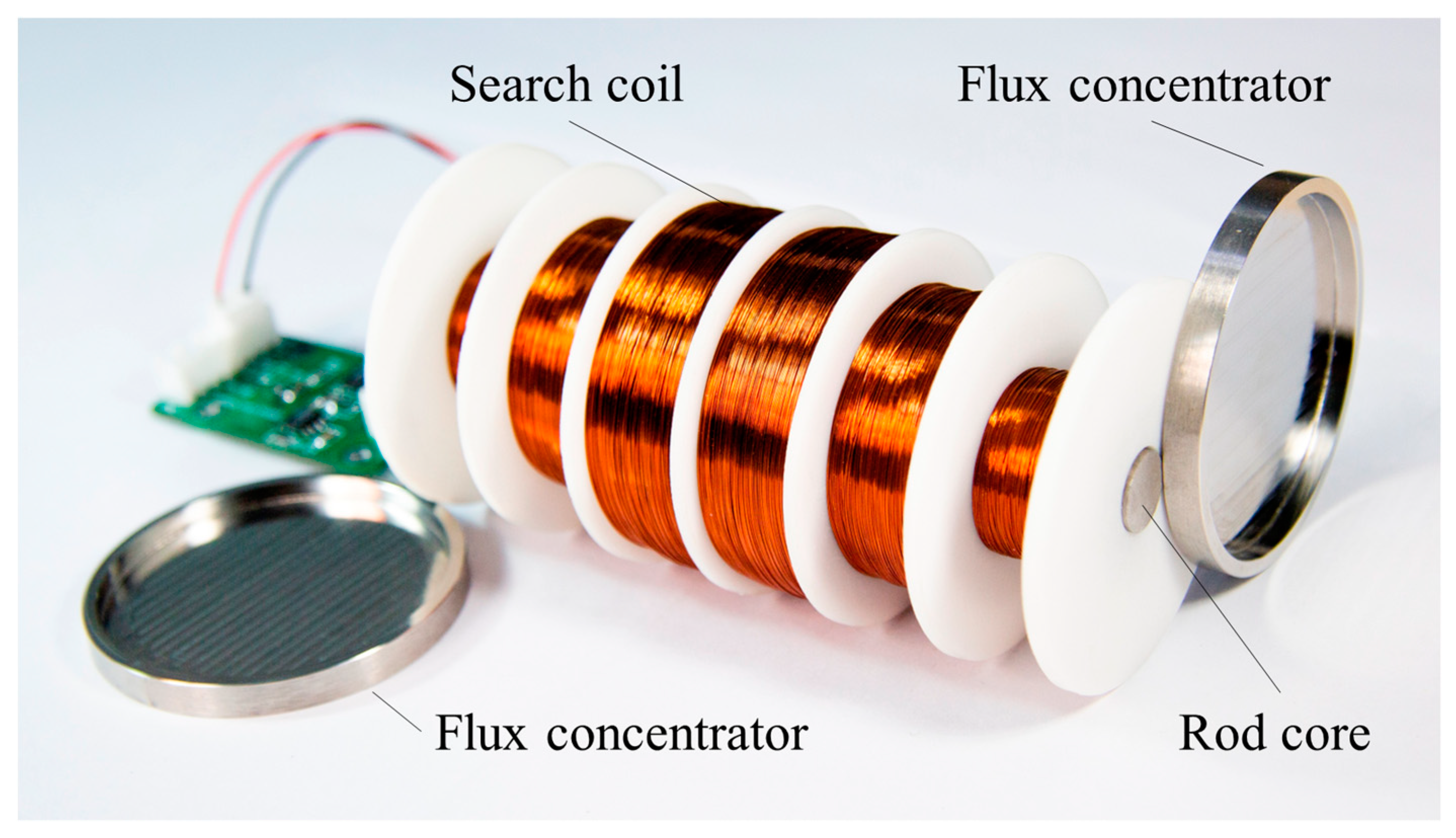
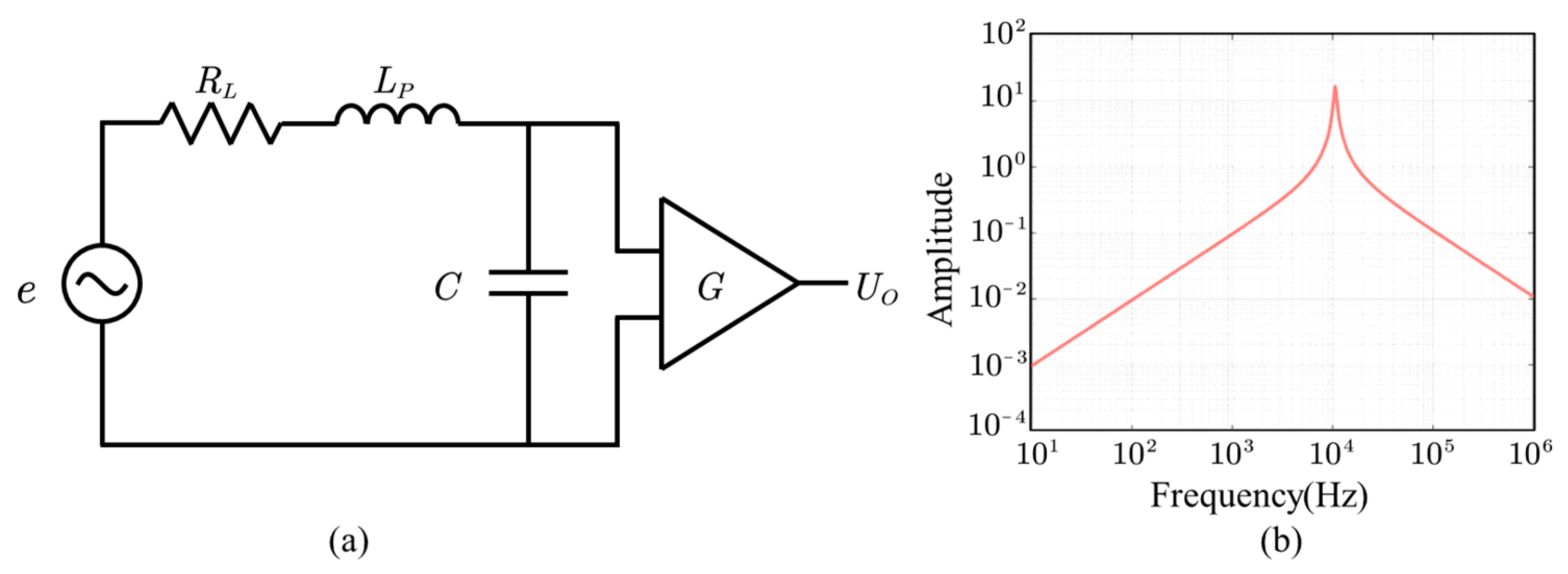
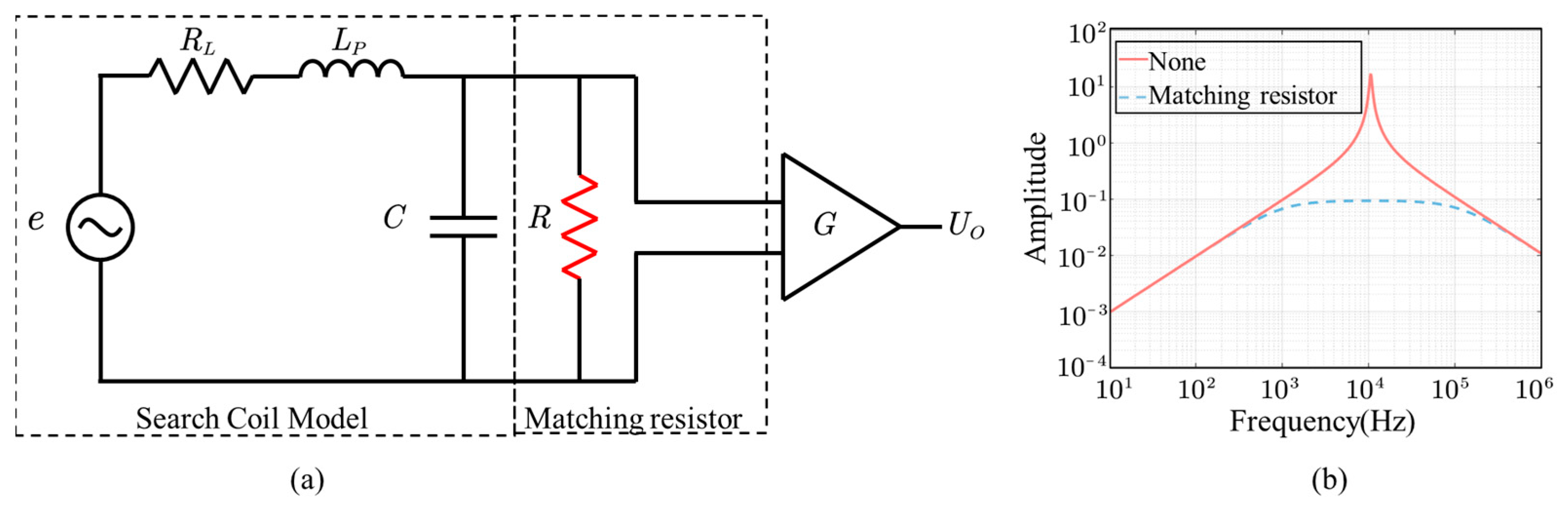
Basic Principles of the Search Coil Magnetometer
3. Design and Results
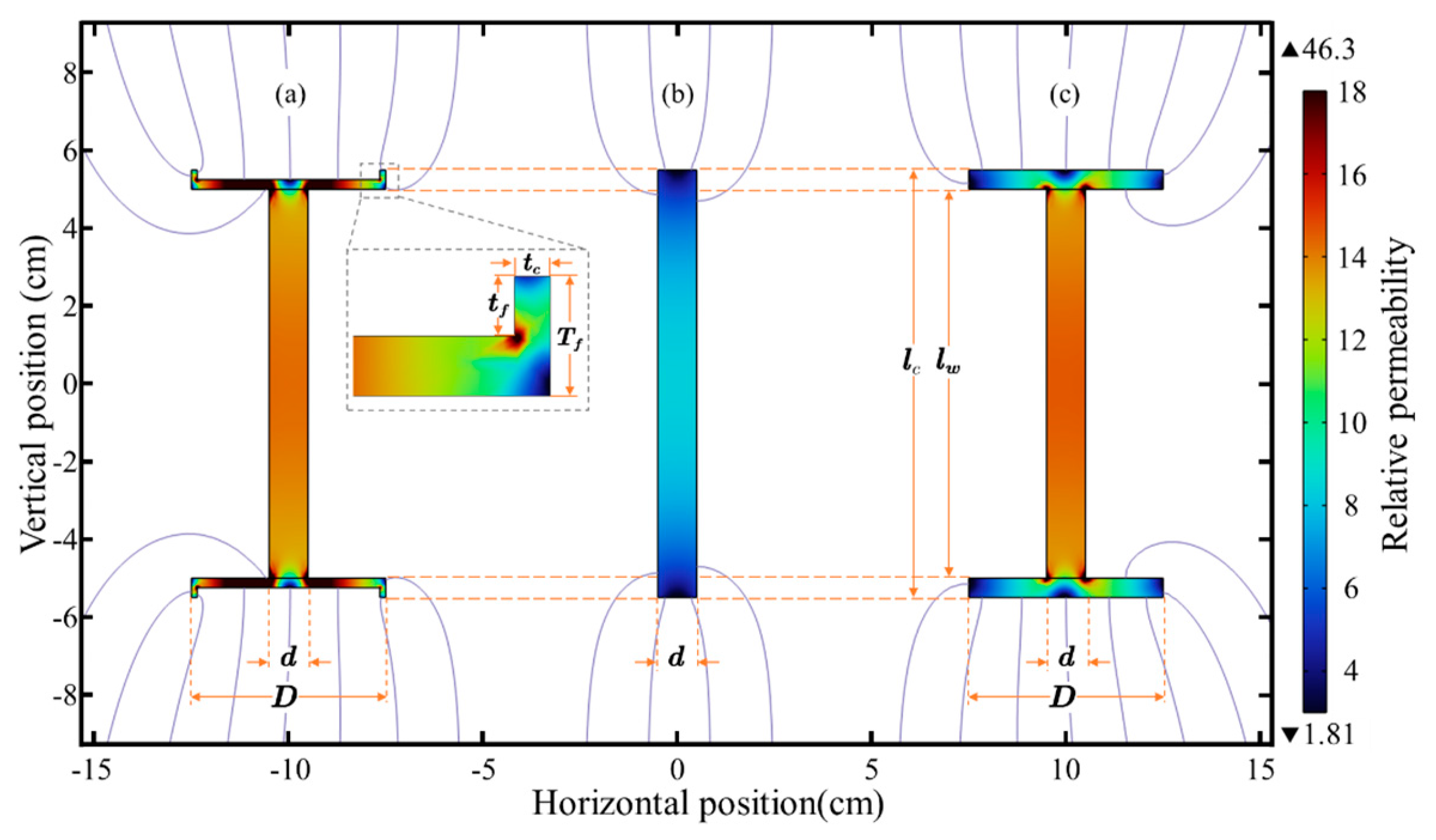
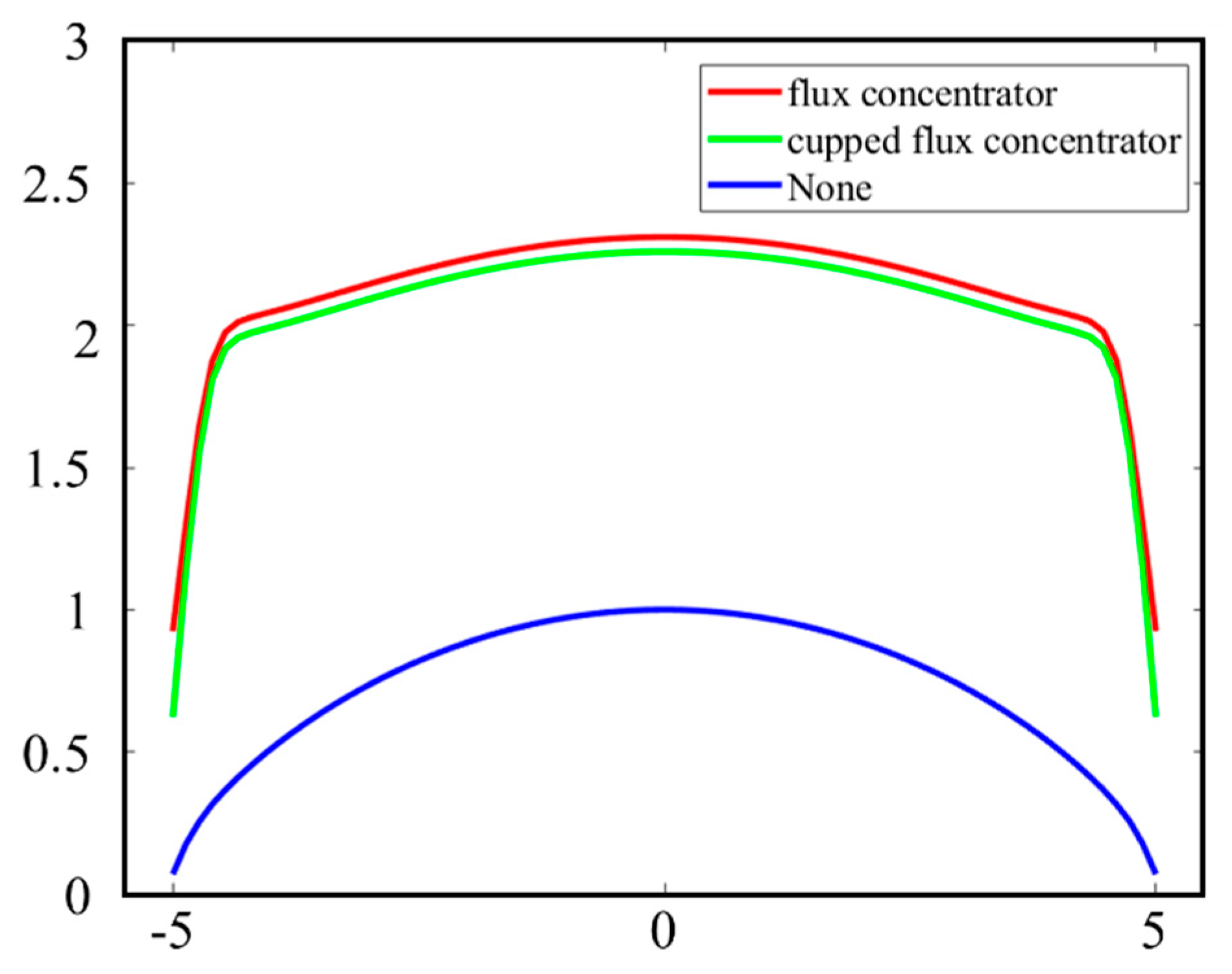
3.1. Core Coil of Cupped Flux Concentration and the Shape of a Rugby Ball Winding
3.2. Experimental Results
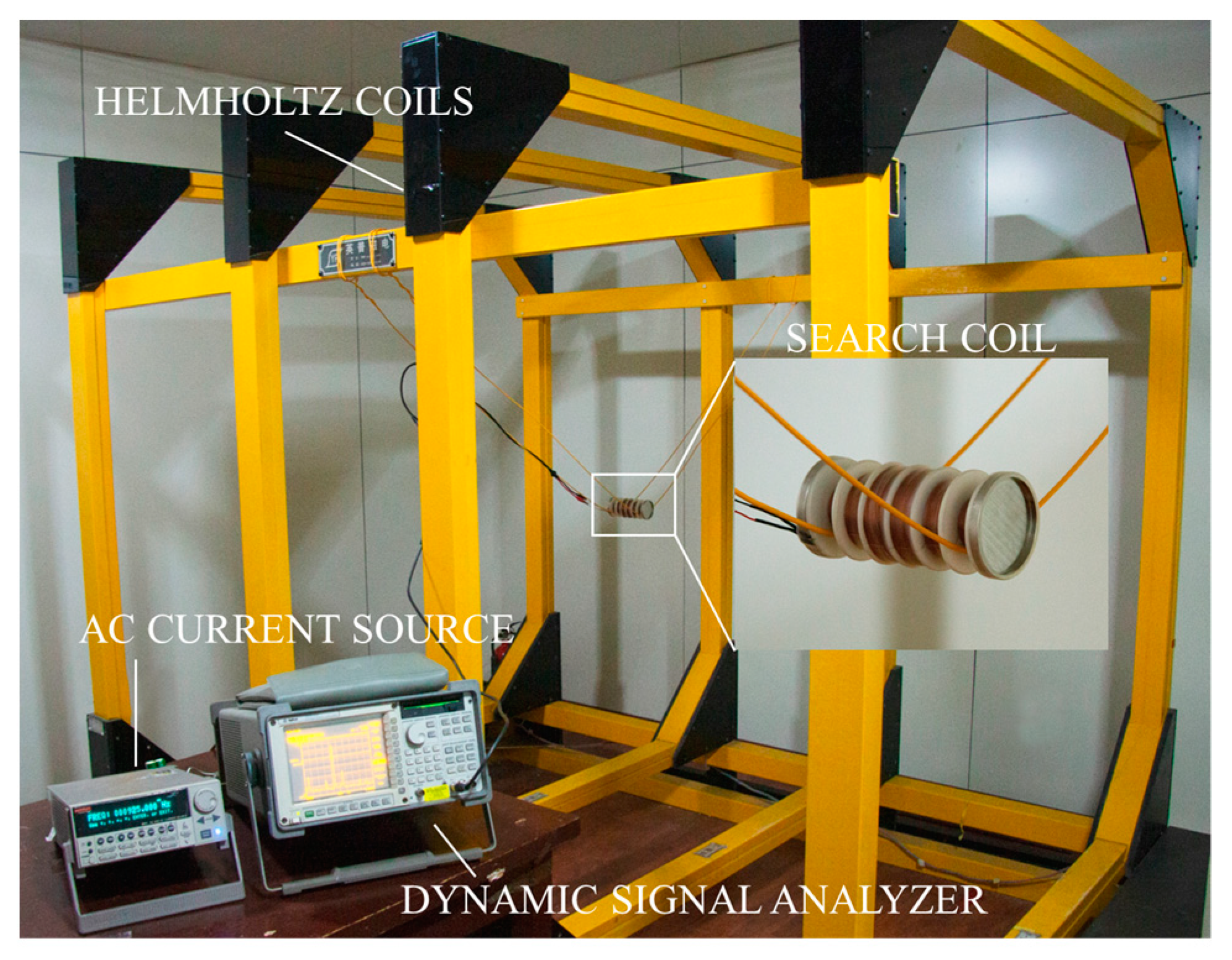
3.2.1. Laboratory Experiment
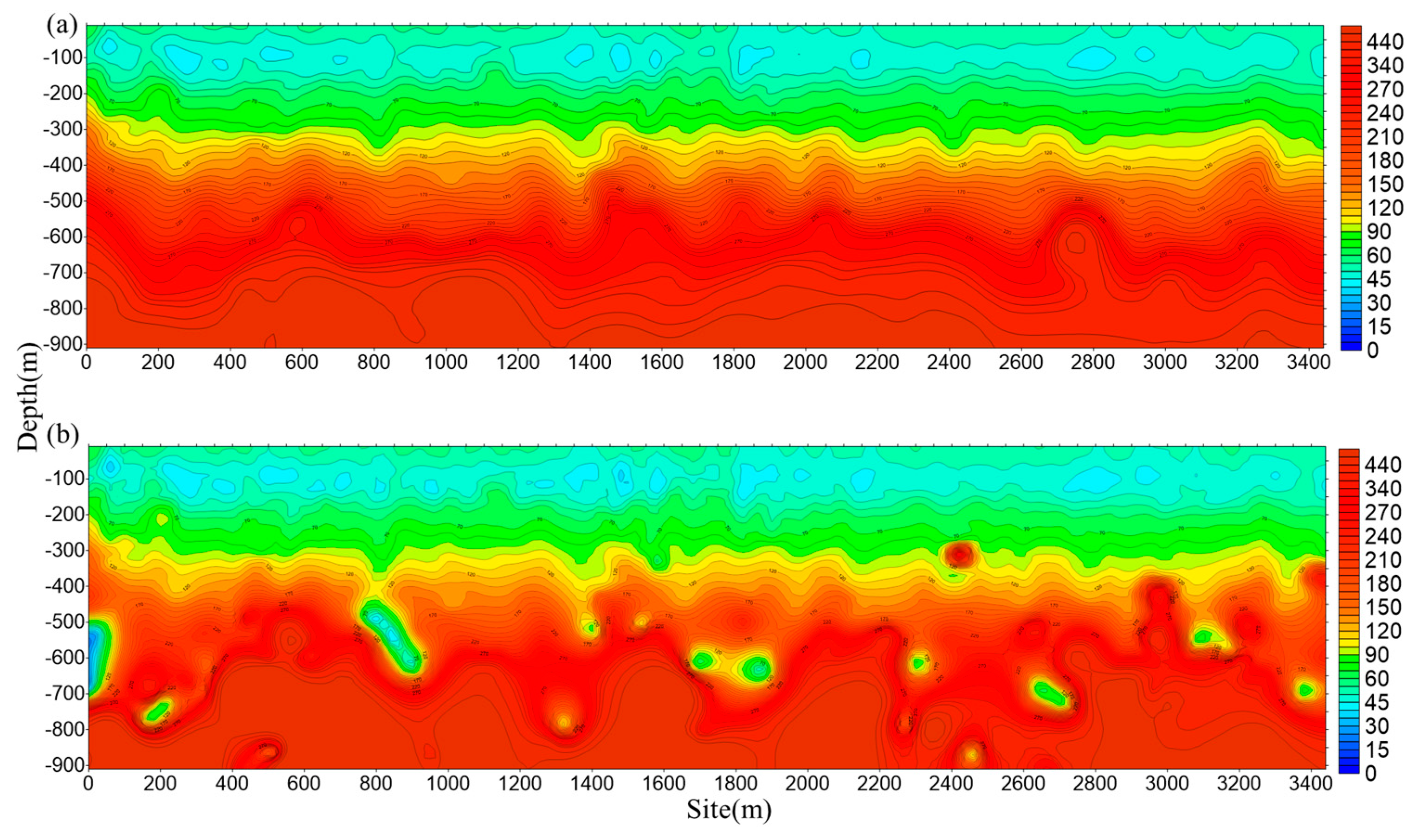
3.2.2. Field Experiment
3.2.3. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- The United States Geological Survey Has Released a New List of 50 Mineral Commodities Critical to the U.S. Economy and National Security. Available online: http://www.usgs.gov/news/national-news-release/us-geological-survey-releases-2022-list-critical-minerals. (accessed on 15 August 2022).
- Agterberg, F. Aspects of regional and worldwide mineral resource prediction. J. Earth Sci. 2021, 32, 279–287. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, M.; Ma, J.; Zhou, H.; Liang, J.; Lin, J. Divergence of tipper vector imaging for ground–airborne frequency-domain electromagnetic method with orthogonal sources. J. Electromagn. Waves Appl. 2020, 34, 316–329. [Google Scholar] [CrossRef]
- Deidda, G.P.; De Carlo, L.; Caputo, M.C.; Cassiani, G. Frequency domain electromagnetic induction imaging: An effective method to see inside a capped landfill. Waste Manag. 2022, 144, 29–40. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Farquharson, C.G.; Lin, T. Three-dimensional forward modeling and characterization of the responses of the ground-airborne frequency-domain electromagnetic method. J. Appl. Geophys. 2022, 199, 104588. [Google Scholar] [CrossRef]
- Steuer, A.; Smirnova, M.; Becken, M.; Schiffler, M.; Günther, T.; Rochlitz, R.; Yogeshwar, P.; Mörbe, W.; Siemon, B.; Costabel, S.; et al. Comparison of novel semi-airborne electromagnetic data with multi-scale geophysical, petrophysical and geological data from Schleiz, Germany. J. Appl. Geophys. 2020, 182, 104172. [Google Scholar] [CrossRef]
- Zhou, H.; Yao, Y.; Liu, C.; Lin, J.; Kang, L.; Li, G.; Zeng, X. Feasibility of signal enhancement with multiple grounded-wire sources for a frequency-domain electromagnetic survey. Geophys. Prospect. 2018, 66, 818–832. [Google Scholar] [CrossRef]
- Yang, Y.A.N.G.; He, J.S.; Li, D.Q. Energy distribution and effective components analysis of 2n sequence pseudo-random signal. Trans. Nonferrous Met. Soc. China 2021, 31, 2102–2115. [Google Scholar] [CrossRef]
- Lin, J.; Kang, L.; Liu, C.; Ren, T.; Zhou, H.; Yao, Y.; Yu, S.; Liu, T.; Liu, P.; Zhang, M. The frequency-domain airborne electromagnetic method with a grounded electrical source. Geophysics 2019, 84, E269–E280. [Google Scholar] [CrossRef]
- Tang, J.T. Frequency-domain electromagnetic methods for exploration of the shallow subsurface: A review. J. Chin. Geophys.-Chin. Ed. 2015, 58, 2681–2705. [Google Scholar]
- Zhou, H.; Lin, J.; Liu, C.; Kang, L.; Li, G.; Zeng, X. Interaction between two adjacent grounded sources in frequency domain semi-airborne electromagnetic survey. Rev. Sci. Instrum. 2016, 87, 034503. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.; Fu, L.; Wang, Y.; Xu, J.; Ji, Y.; Yang, M. Development of sensor used for grounded electrical source air-ground transient electromagnetic detection. J. Jilin Univ. (Eng. Technol. Ed.) 2014, 44, 888–894. [Google Scholar]
- Yu, S.; Wei, Y.; Zhang, J.; Wang, S. Noise optimization design of frequency-domain air-core sensor based on capacitor tuning technology. Sensors 2019, 20, 194. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.G.; Shang, X.L.; Lin, J. Development of a low noise induction magnetic sensor using magnetic flux negative feedback in the time domain. Rev. Sci. Instrum. 2016, 87, 054501. [Google Scholar] [CrossRef] [PubMed]
- Auken, E.; Christiansen, A.V.; Westergaard, J.H.; Kirkegaard, C.; Foged, N.; Viezzoli, A. An integrated processing scheme for high-resolution airborne electromagnetic surveys, the SkyTEM system. J. Explor. Geophys. 2009, 40, 184–192. [Google Scholar] [CrossRef] [Green Version]
- Steuer, A.; Siemon, B.; Auken, E. A comparison of helicopter-borne electromagnetics in frequency-and time-domain at the Cuxhaven valley in Northern Germany. J. Appl. Geophys. 2009, 67, 194–205. [Google Scholar] [CrossRef]
- Bournas, N.; Taylor, S.; Prikhodko, A.; Plastow, G.; Kwan, K.; Legault, J.; Berardelli, P. Superparamagnetic effects discrimination in VTEM™ data of Greenland using multiple criteria and predictive approaches. J. Appl. Geophys. 2017, 145, 59–73. [Google Scholar] [CrossRef]
- Xingyu, C.; Shuang, Z.; Shudong, C. An optimal transfer characteristic of an air cored transient electromagnetic sensor. In Proceedings of the International Conference on Industrial Control and Electronics Engineering, IEEE, Xi’an, China, 23–25 August 2012; pp. 482–485. [Google Scholar]
- Coillot, C.; Moutoussamy, J.; Leroy, P.; Chanteur, G.; Roux, A. Improvements on the design of search coil magnetometer for space experiments. J. Sens. Lett. 2007, 5, 167–170. [Google Scholar] [CrossRef]
- Paperno, E.; Grosz, A. A miniature and ultralow power search coil optimized for a 20 mHz to 2 kHz frequency range. J. Appl. Phys. 2009, 105, 07E708. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
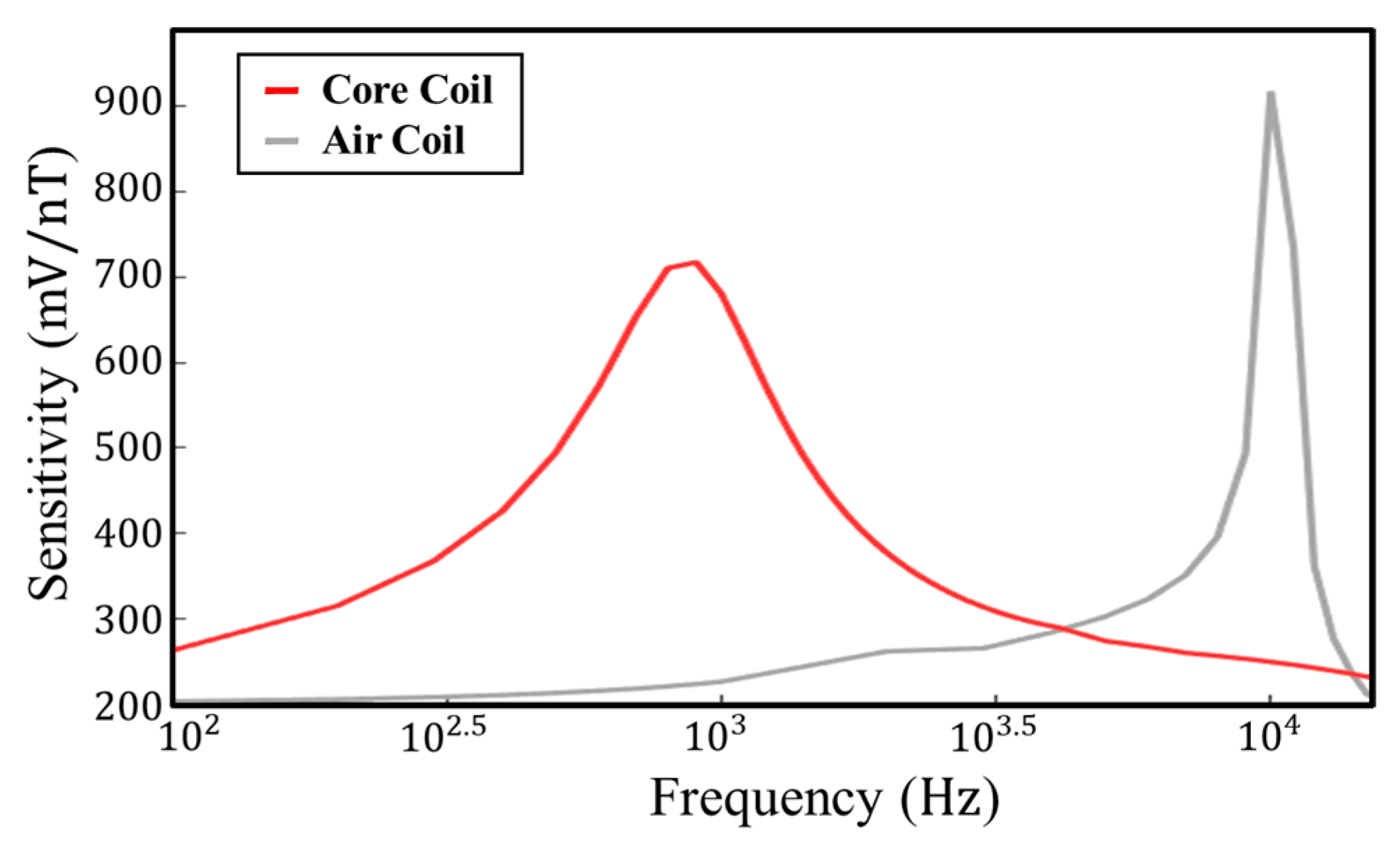
| Type | Weight | Size | Sensitivity |
|---|---|---|---|
| Core coil | 1.7 kg | 724 mV/nT @ 1 KHz | |
| Air coil | 2.4 kg | 227 mV/nT @ 1 KHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, F.; Tong, Y.; Zou, B. Optimized Weight Low-Frequency Search Coil Magnetometer for Ground–Airborne Frequency Domain Electromagnetic Method. Sensors 2023, 23, 3337. https://doi.org/10.3390/s23063337
Teng F, Tong Y, Zou B. Optimized Weight Low-Frequency Search Coil Magnetometer for Ground–Airborne Frequency Domain Electromagnetic Method. Sensors. 2023; 23(6):3337. https://doi.org/10.3390/s23063337
Chicago/Turabian StyleTeng, Fei, Ye Tong, and Bofeng Zou. 2023. "Optimized Weight Low-Frequency Search Coil Magnetometer for Ground–Airborne Frequency Domain Electromagnetic Method" Sensors 23, no. 6: 3337. https://doi.org/10.3390/s23063337