
Sensor Fusion in Autonomous Vehicle with Traffic Surveillance Camera System: Detection, Localization, and AI Networking



Abstract
:1. Introduction
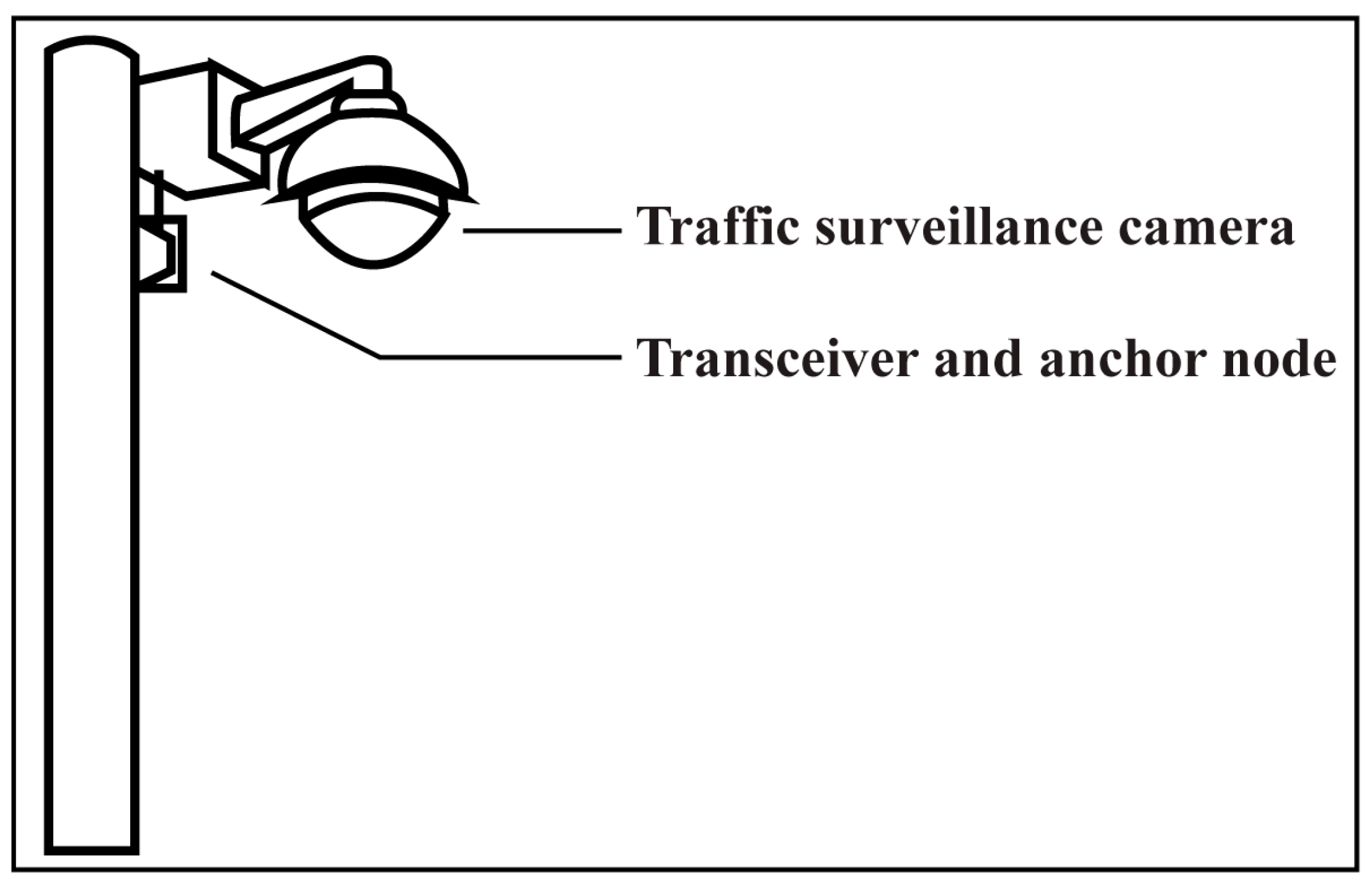
- Traffic surveillance camera systems are introduced for the first time with AV fusion technologies.
- For self-driving cars’ autonomous driving, 4D detection, exact localization, and AI networking accuracy improvement methodologies are shown.
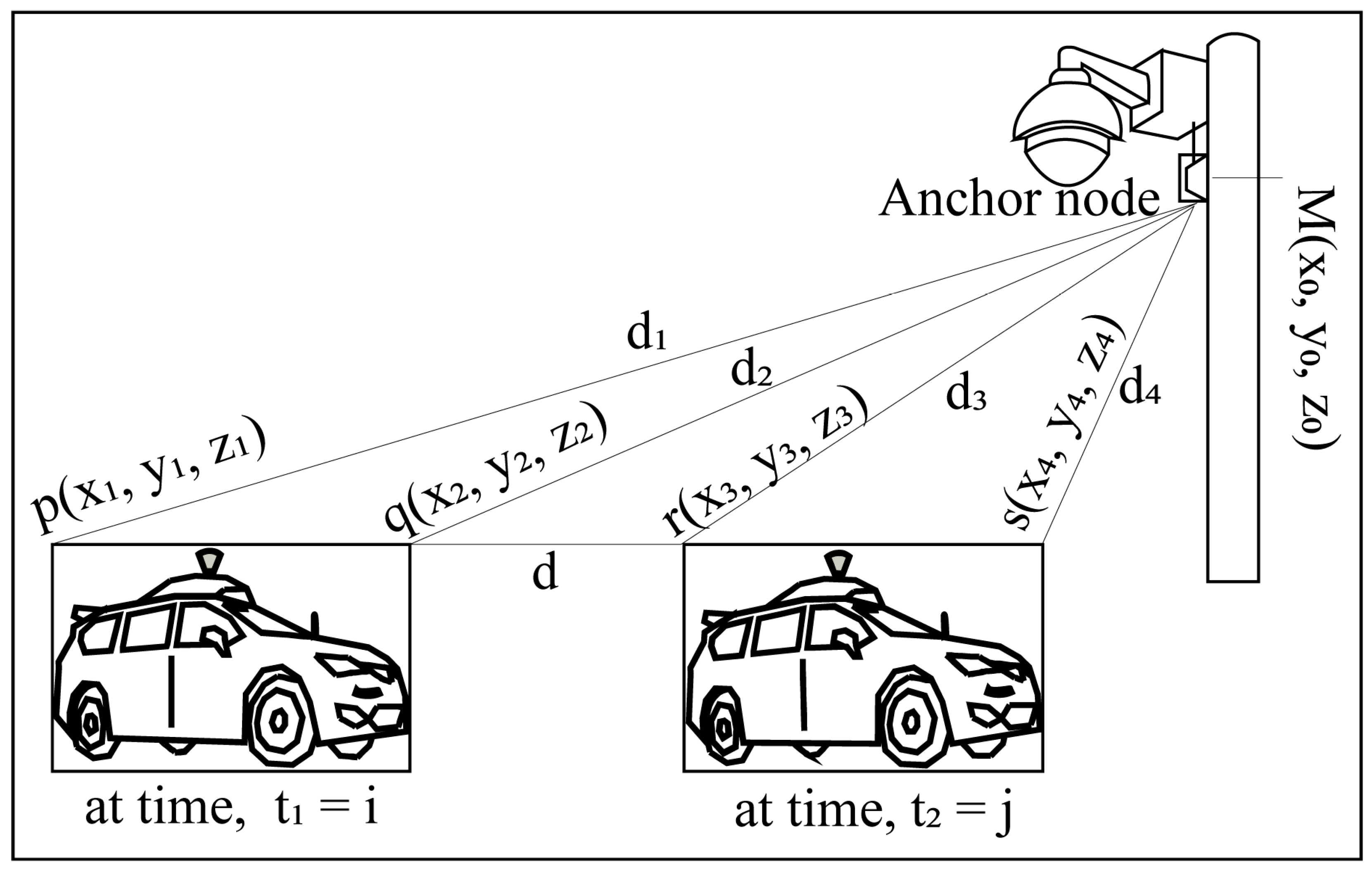
- Exact localization procedure mathematical affectation is figured for joint road vehicles’ geographical positioning with the multi-anchor node positioning system.
- Deep learning-based AV driving systems and FSCDS technologies are proposed for EAID.
2. State-of-the-Art Related Works and Problems Estimation
2.1. The Summarized Contributions Compared to Related Works
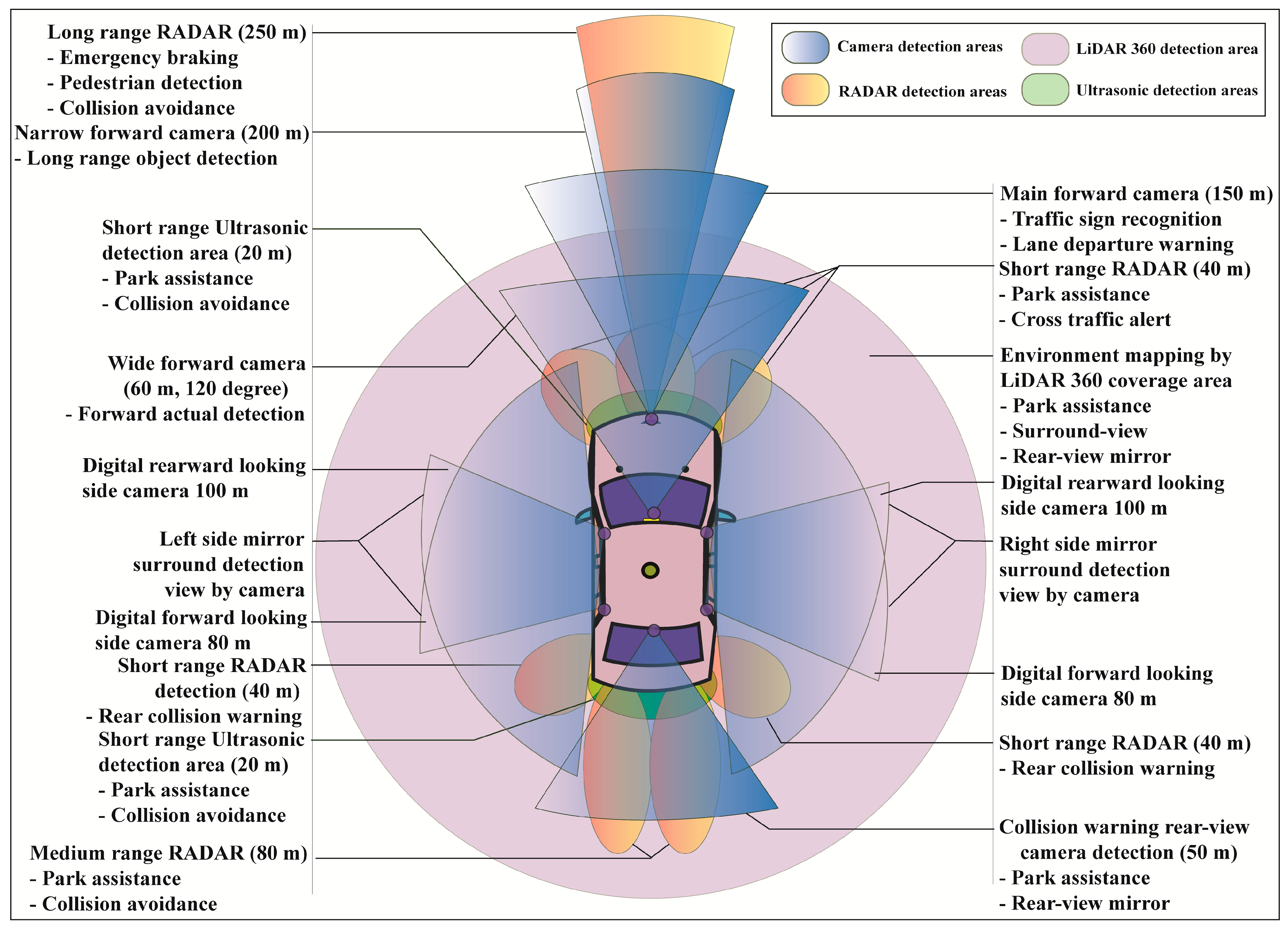
2.2. Sensors in AV for Object Detection
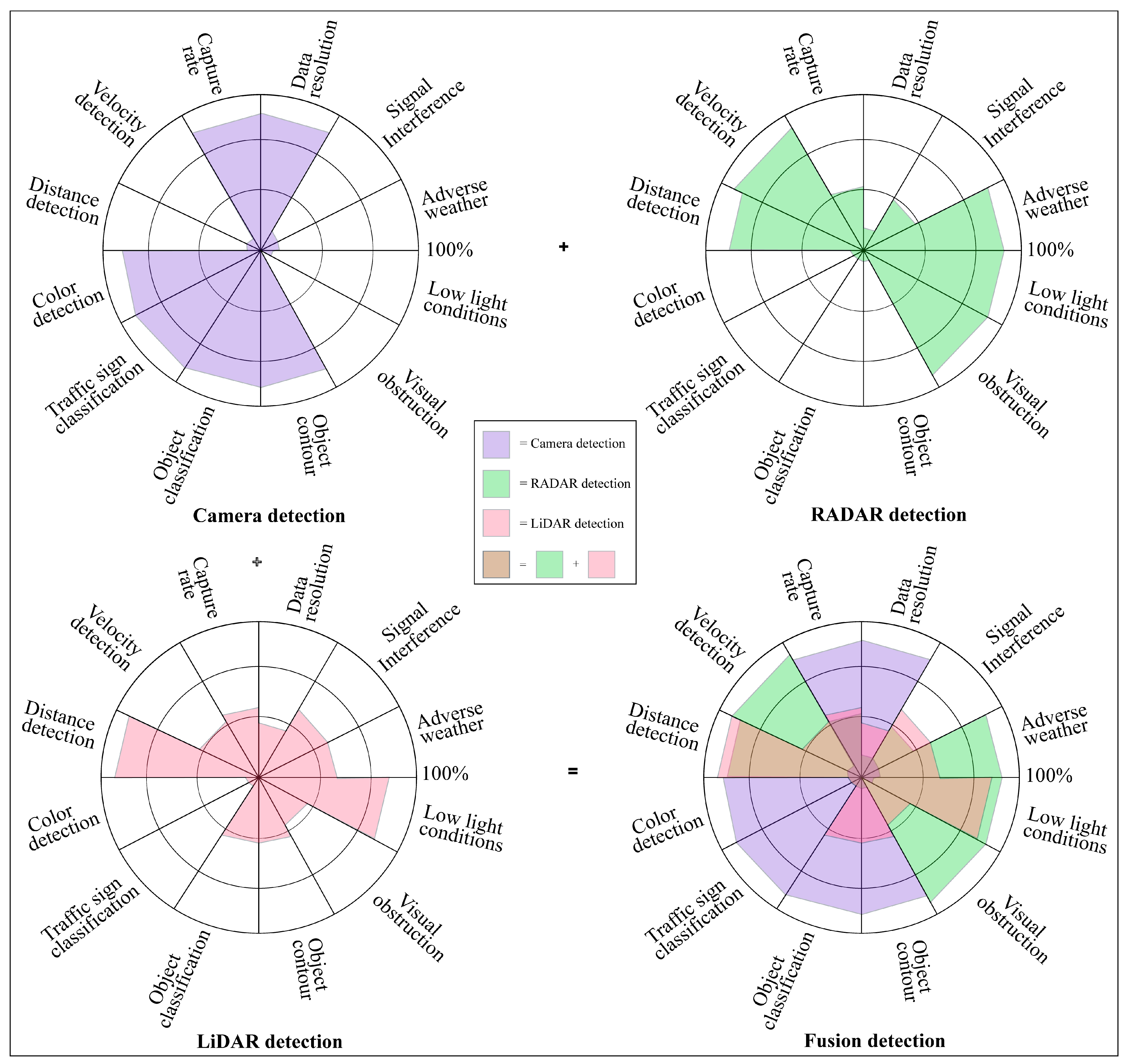
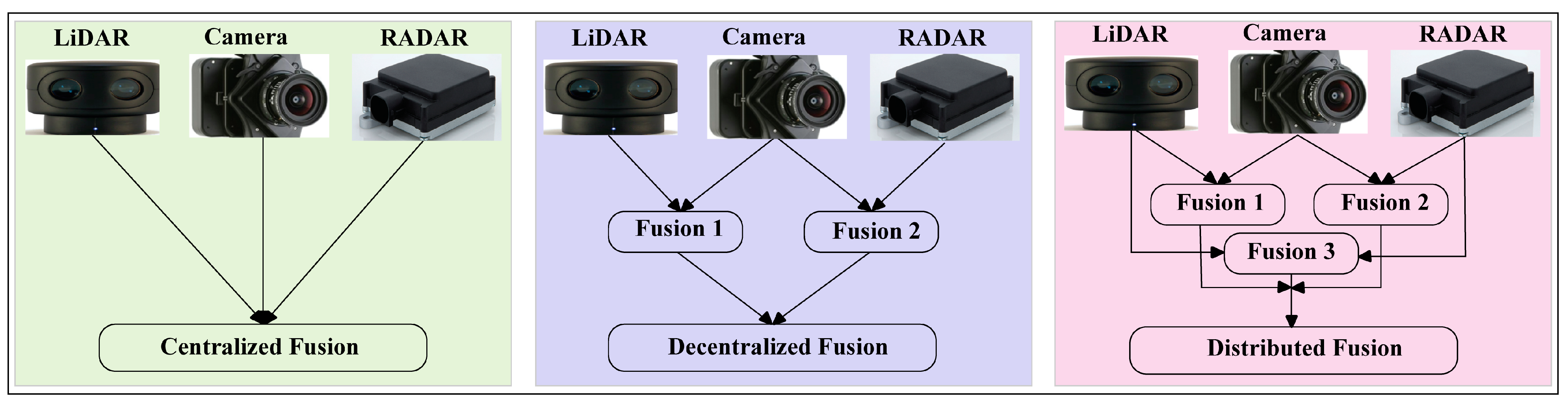
2.3. Sensor Fusion Technology in AV
3. Proposed Approaches for Detection, Localization, and AI Networking
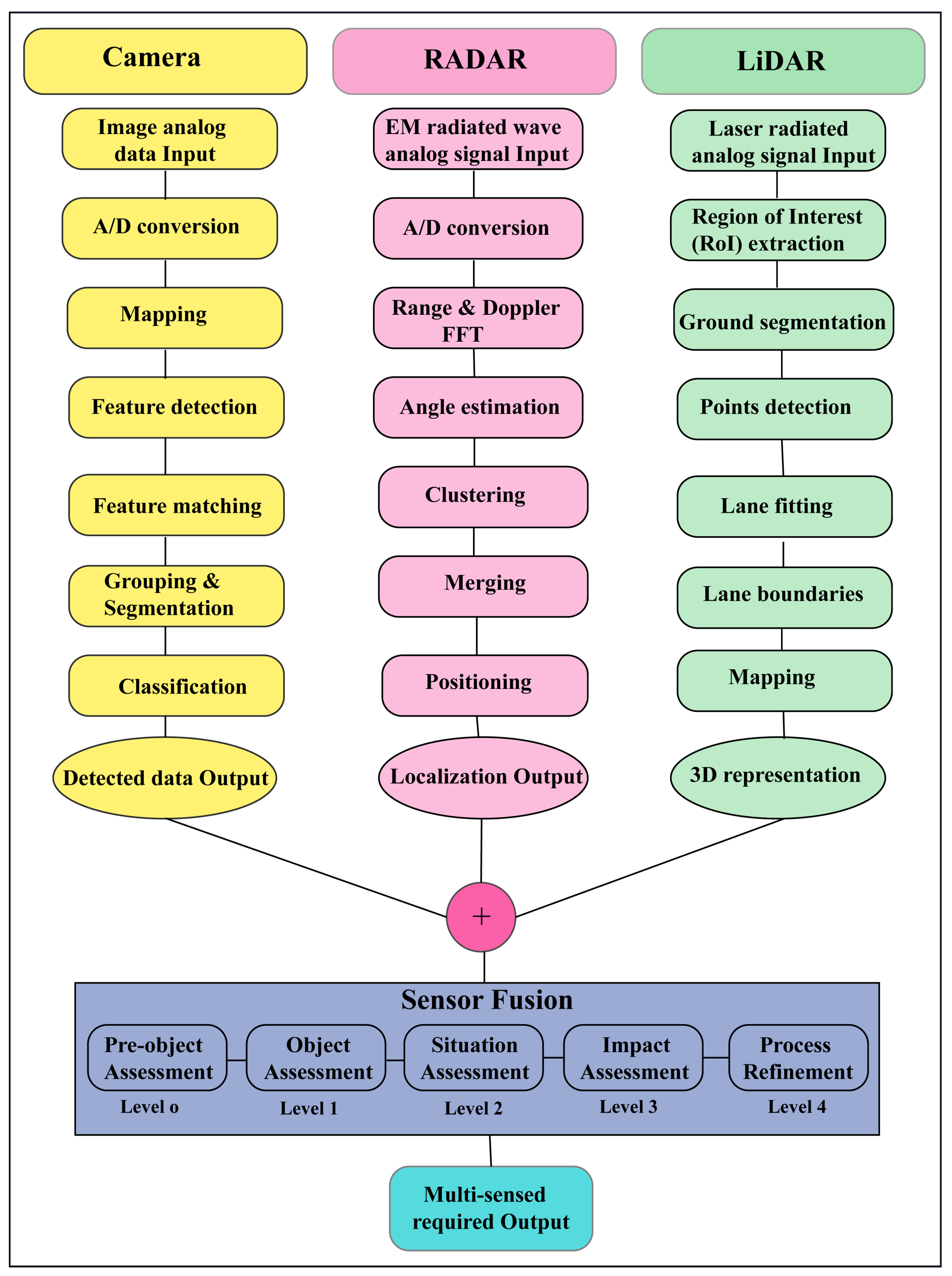
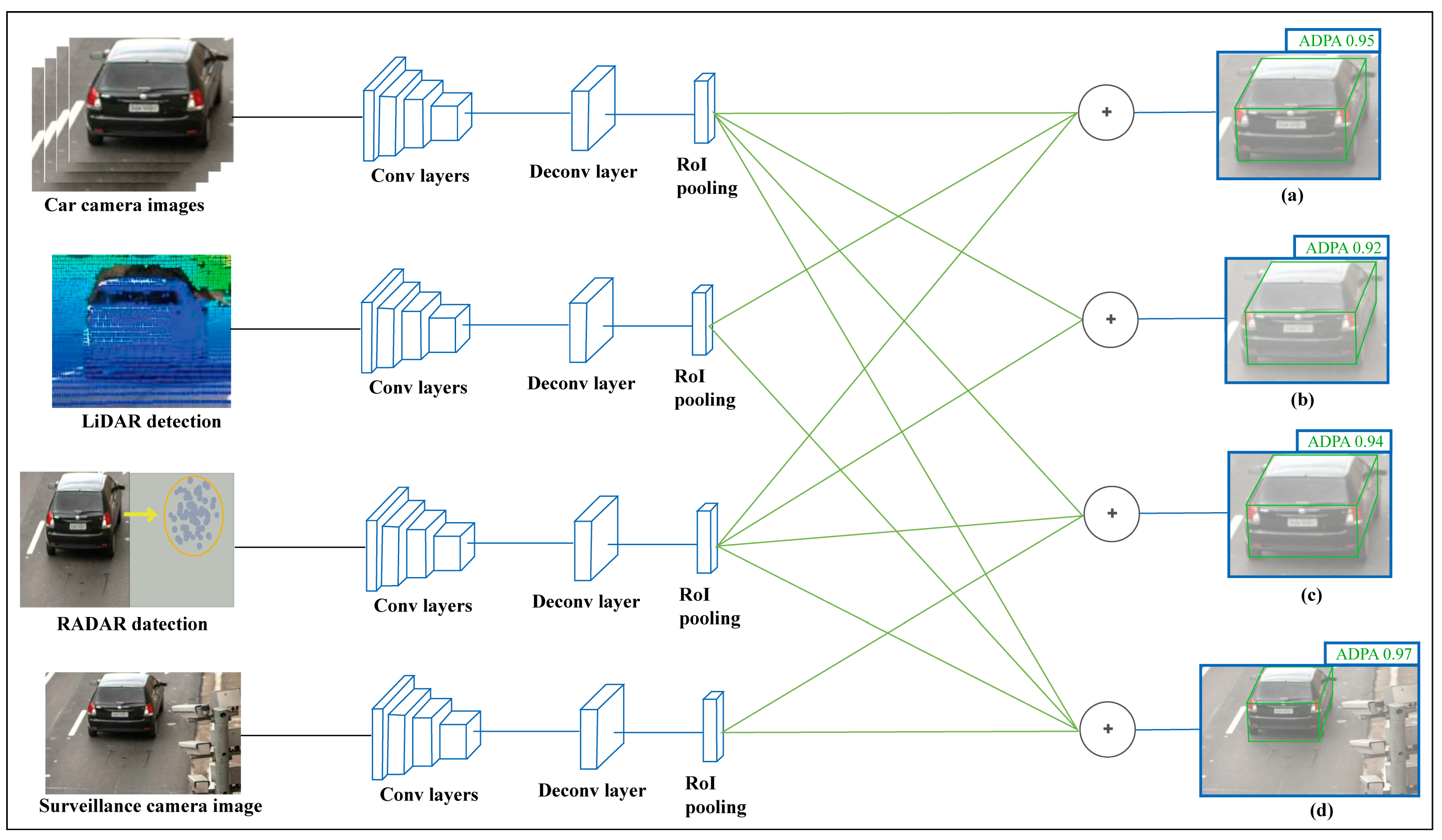
3.1. Detection Approach
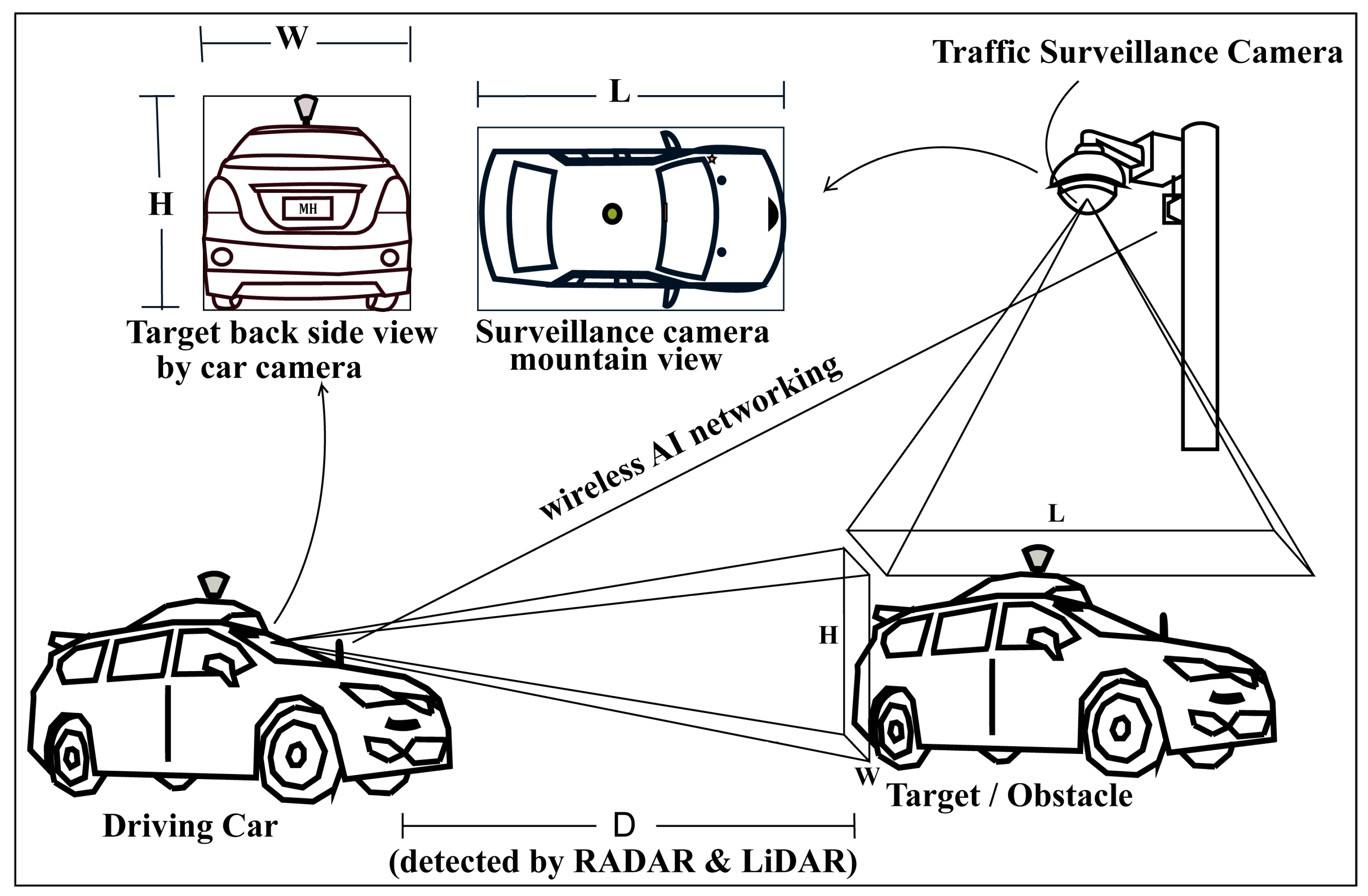
3.2. Localization Approach
3.3. Deep Learning Approach
Dataset for Train the Model
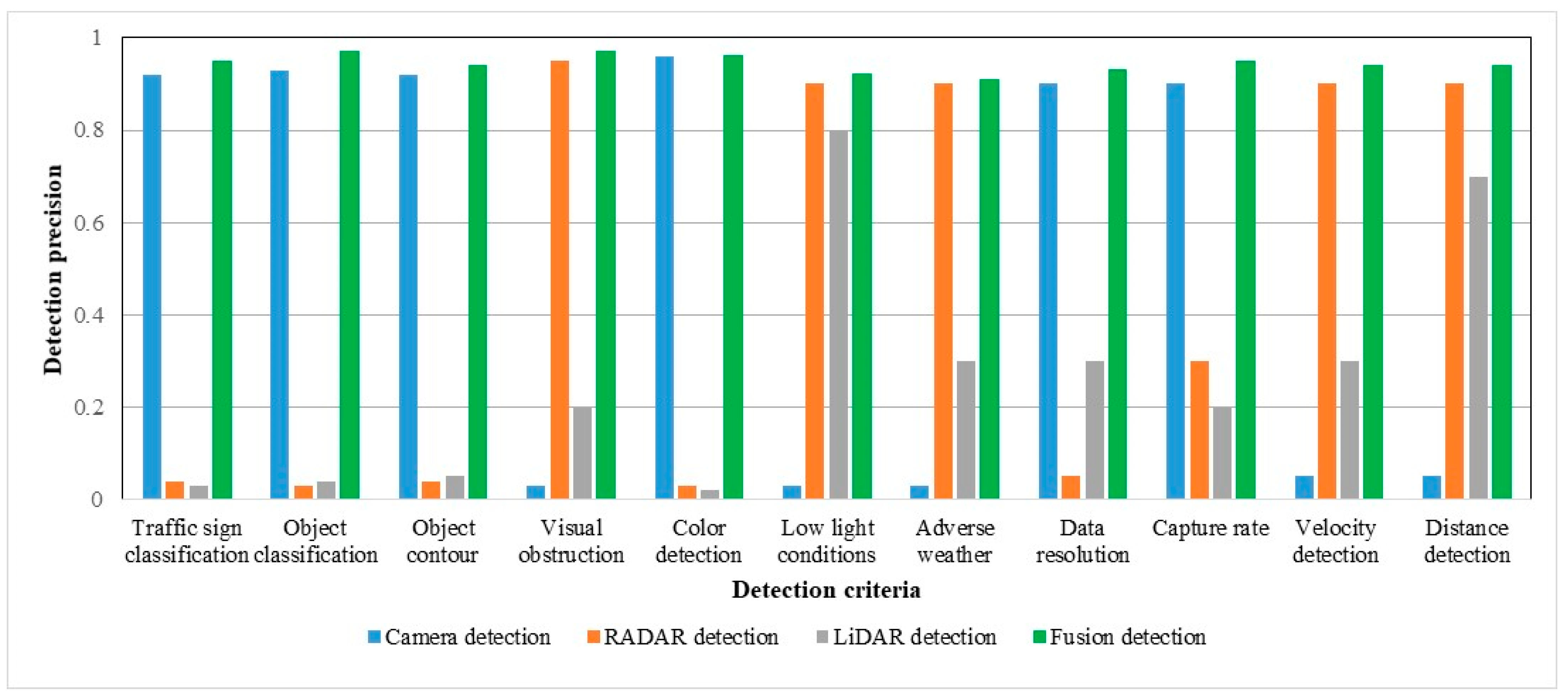
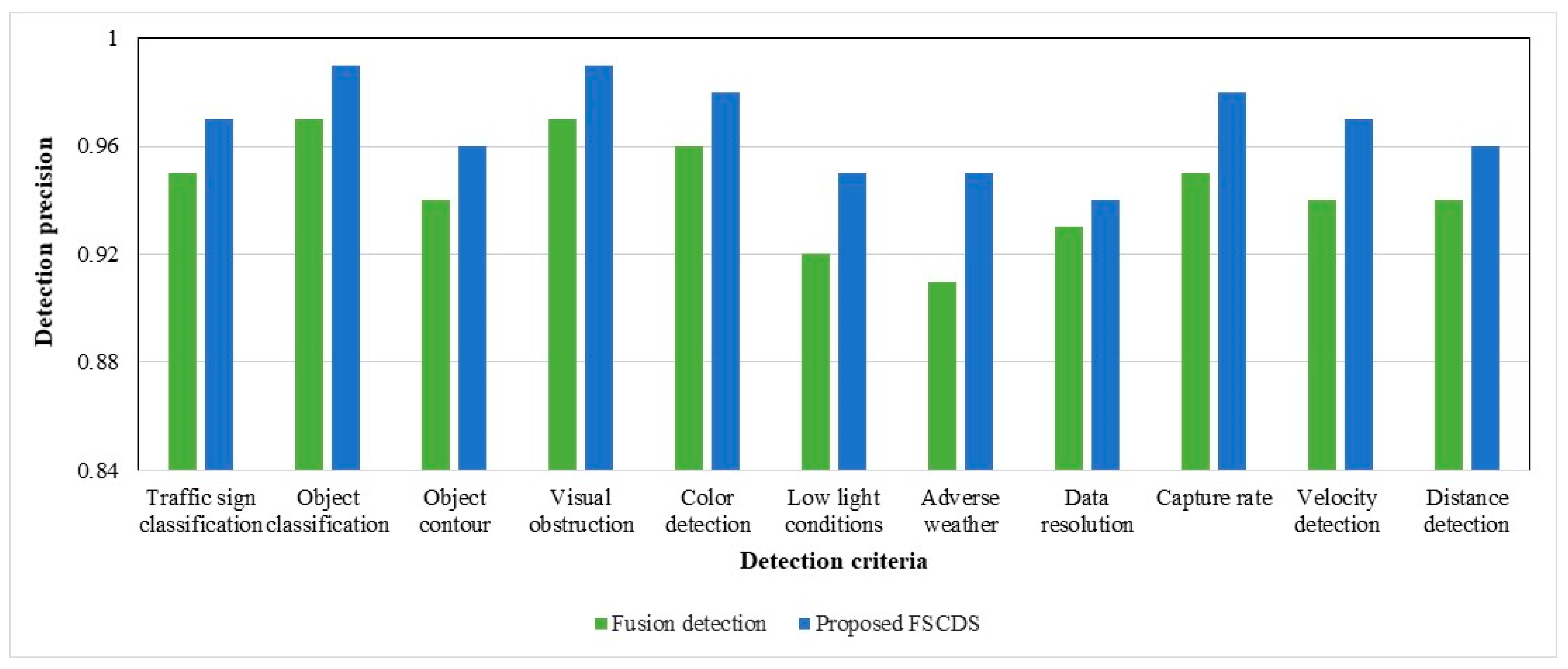
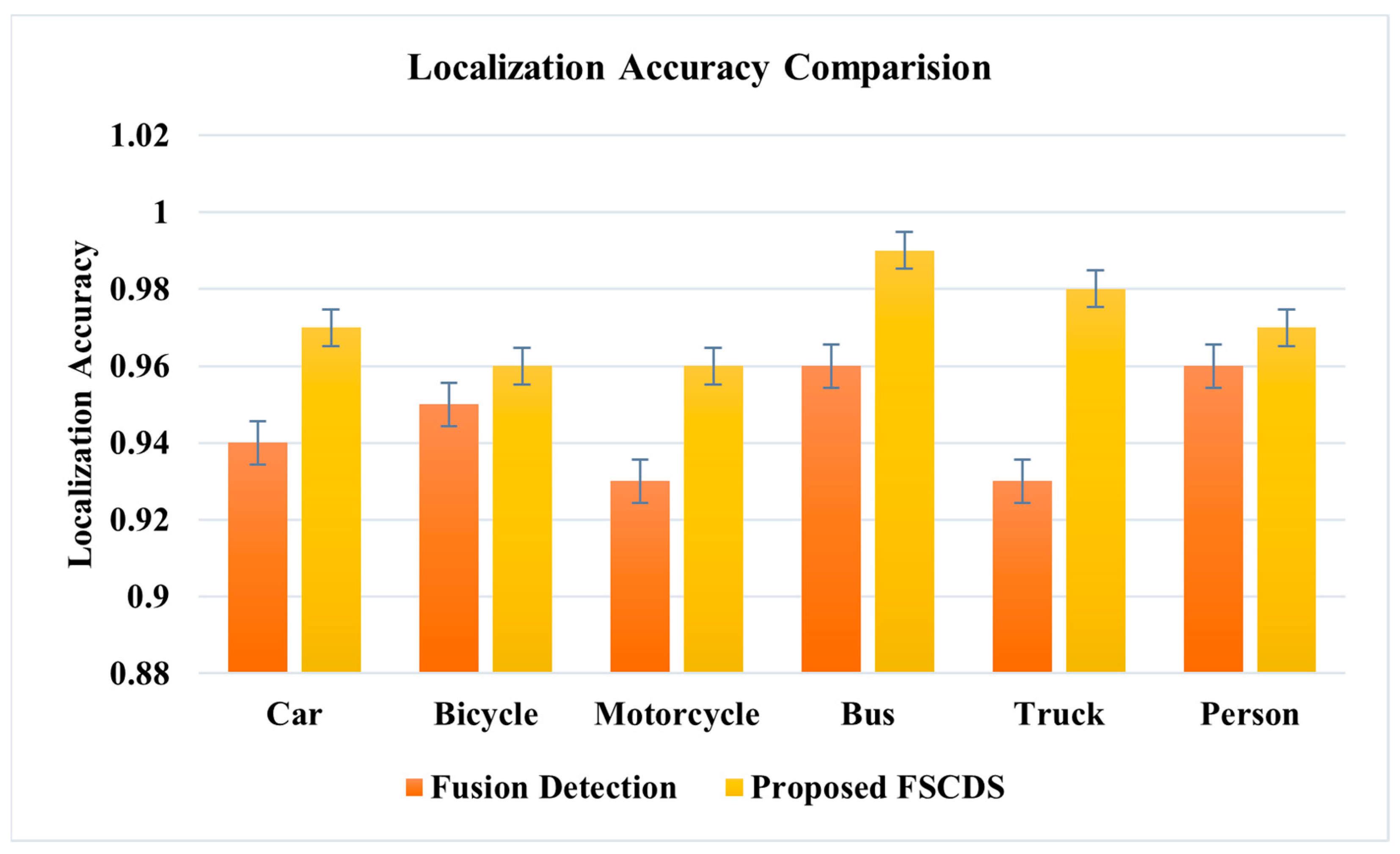
4. Experimental Results with Qualitative Detection and Networking Performance Analysis of the Proposed Systems
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 4D | Four-Dimensional |
| 6G | Sixth Generation |
| ADAS | Advanced Driver Assistance Systems |
| ADPA | Average Detection Precision Accuracy |
| AI | Artificial Intelligence |
| AIP | Advanced Image Processing |
| AV | Autonomous Vehicle |
| CNN | Convolutional Neural Network |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| EAID | Experienced Artificial Intelligent Driver |
| FSCDS | Fusion with Surveillance Camera Detection System |
| GPS | Global Positioning System |
| LiDAR | Light Detection and Ranging |
| MHS | Maximum Heading Similarity |
| ML | Machine Learning |
| NHTHA | National Highway Transportation Safety Administration |
| QoS | Quality of Services |
| RADAR | Radio Detection and Ranging |
| R-CCN | Region with Convolutional Neural Network |
| RoI | Region of Interest |
| SAE | Society of Automotive Engineers |
| WHO | World Health Organization |
References
- World Health Organization. Global Status Report on Road Safety. 2018. Available online: https://www.who.int/publications/i/item/9789241565684 (accessed on 5 January 2023).
- Chen, S.; Kuhn, M.; Prettner, K.; Bloom, D.E. The global macroeconomic burden of road injuries: Estimates and projections for 166 countries. Lancet Planet. Health 2019, 3, e390–e398. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. 2016. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/Publication/812318 (accessed on 5 January 2023).
- Waymo. Available online: https://waymo.com/company/ (accessed on 5 January 2023).
- Tesla. Available online: https://www.tesla.com/autopilot (accessed on 6 January 2023).
- Teoh, E.R.; Kidd, D.G. Rage against the machine? Google’s self-driving cars versus human drivers. J. Saf. Res. 2017, 63, 57–60. [Google Scholar] [CrossRef]
- Waymo Safety Report. 2020. Available online: https://storage.googleapis.com/sdc-prod/v1/safety-report/2020-09-waymo-safety-report.pdf (accessed on 6 January 2023).
- Favarò, F.M.; Nader, N.; Eurich, S.O.; Tripp, M.; Varadaraju, N. Examining accident reports involving autonomous vehicles in California. PLoS ONE 2017, 12, e0184952. [Google Scholar] [CrossRef]
- Crouch, S. Velocity Measurement in Automotive Sensing: How FMCW Radar and Lidar Can Work Together. IEEE Potentials 2019, 39, 15–18. [Google Scholar] [CrossRef]
- Hecht, J. LIDAR for Self-Driving Cars. Opt. Photonics News 2018, 29, 26–33. [Google Scholar] [CrossRef]
- Domhof, J.; Kooij, J.F.P.; Gavrila, D.M. A Joint Extrinsic Calibration Tool for Radar, Camera and Lidar. IEEE Trans. Intell. Veh. 2021, 6, 571–582. [Google Scholar] [CrossRef]
- Chen, C.; Fragonara, L.Z.; Tsourdos, A. RoIFusion: 3D Object Detection From LiDAR and Vision. IEEE Access 2021, 9, 51710–51721. [Google Scholar] [CrossRef]
- Hu, W.-C.; Chen, C.-H.; Chen, T.-Y.; Huang, D.-Y.; Wu, Z.-C. Moving object detection and tracking from video captured by moving camera. J. Vis. Commun. Image Represent. 2015, 30, 164–180. [Google Scholar] [CrossRef]
- Manjunath, A.; Liu, Y.; Henriques, B.; Engstle, A. Radar Based Object Detection and Tracking for Autonomous Driving. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munic, Germany, 16–18 April 2018; pp. 1–4. [Google Scholar]
- Reid, T.G.; Houts, S.E.; Cammarata, R.; Mills, G.; Agarwal, S.; Vora, A.; Pandey, G. Localization Requirements for Autonomous Vehicles. arXiv 2019, arXiv:1906.01061. [Google Scholar] [CrossRef] [Green Version]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [Green Version]
- Campisi, T.; Severino, A.; Al-Rashid, M.A.; Pau, G. The Development of the Smart Cities in the Connected and Autonomous Vehicles (CAVs) Era: From Mobility Patterns to Scaling in Cities. Infrastructures 2021, 6, 100. [Google Scholar] [CrossRef]
- Harounabadi, M.; Soleymani, D.M.; Bhadauria, S.; Leyh, M.; Roth-Mandutz, E. V2X in 3GPP Standardization: NR Sidelink in Release-16 and Beyond. IEEE Commun. Stand. Mag. 2021, 5, 12–21. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Yu, Z. Intelligent vehicle sideslip angle estimation considering measurement signals delay. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1584–1589. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Automated Vehicle Sideslip Angle Estimation Considering Signal Measurement Characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2022, 31, 179–192. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Lu, Y.; Gao, L.; Song, S. Vision-aided intelligent vehicle sideslip angle estimation based on a dynamic model. IET Intell. Transp. Syst. 2020, 14, 1183–1189. [Google Scholar] [CrossRef]
- Ren, W.; Jiang, K.; Chen, X.; Wen, T.; Yang, D. Adaptive Sensor Fusion of Camera, GNSS and IMU for Autonomous Driving Navigation. In Proceedings of the CAA International Conference on Vehicular Control and Intelligence (CVCI), Hangzhou, China, 18–20 December 2020; pp. 113–118. [Google Scholar]
- Chang, L.; Niu, X.; Liu, T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors 2020, 20, 4702. [Google Scholar] [CrossRef] [PubMed]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Yu, Z. IMU-Based Automated Vehicle Body Sideslip Angle and Attitude Estimation Aided by GNSS Using Parallel Adaptive Kalman Filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Tian, S.; Zhang, X.; Wang, X.; Sun, P.; Zhang, H. A Selective Anchor Node Localization Algorithm for Wireless Sensor Networks. In Proceedings of the 2007 International Conference on Convergence Information Technology (ICCIT 2007), Gyeongju, Republic of Korea, 21–23 November 2007; pp. 358–362. [Google Scholar]
- Liu, Q.; Liu, Y.; Liu, C.; Chen, B.; Zhang, W.; Li, L.; Ji, X. Hierarchical Lateral Control Scheme for Autonomous Vehicle with Uneven Time Delays Induced by Vision Sensors. Sensors 2018, 18, 2544. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Lee, J.-H.; Son, S.H. A Survey of Obstacle Detection Using Vision Sensor for Autonomous Vehicles. In Proceedings of the 2016 IEEE 22nd International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Daegu, Republic of Korea, 17–19 August 2016; p. 264. [Google Scholar] [CrossRef]
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast segmentation of 3D point clouds: A paradigm on LiDAR data for autonomous vehicle applications. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5067–5073. [Google Scholar] [CrossRef]
- Chen, Q.; Tang, S.; Yang, Q.; Fu, S. Cooper: Cooperative Perception for Connected Autonomous Vehicles Based on 3D Point Clouds. In Proceedings of the 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS), Dallas, TX, USA, 7–10 July 2019; pp. 514–524. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, M.Z.; Shahjalal, M.; Ahmed, S.; Jang, Y.M. 6G Wireless Communication Systems: Applications, Requirements, Technologies, Challenges, and Research Directions. IEEE Open J. Commun. Soc. 2020, 1, 957–975. [Google Scholar] [CrossRef]
- Fayyad, J.; Jaradat, M.; Gruyer, D.; Najjaran, H. Deep Learning Sensor Fusion for Autonomous Vehicle Perception and Localization: A Review. Sensors 2020, 20, 4220. [Google Scholar] [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T.; Macesanu, G. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2019, 37, 362–386. [Google Scholar] [CrossRef] [Green Version]
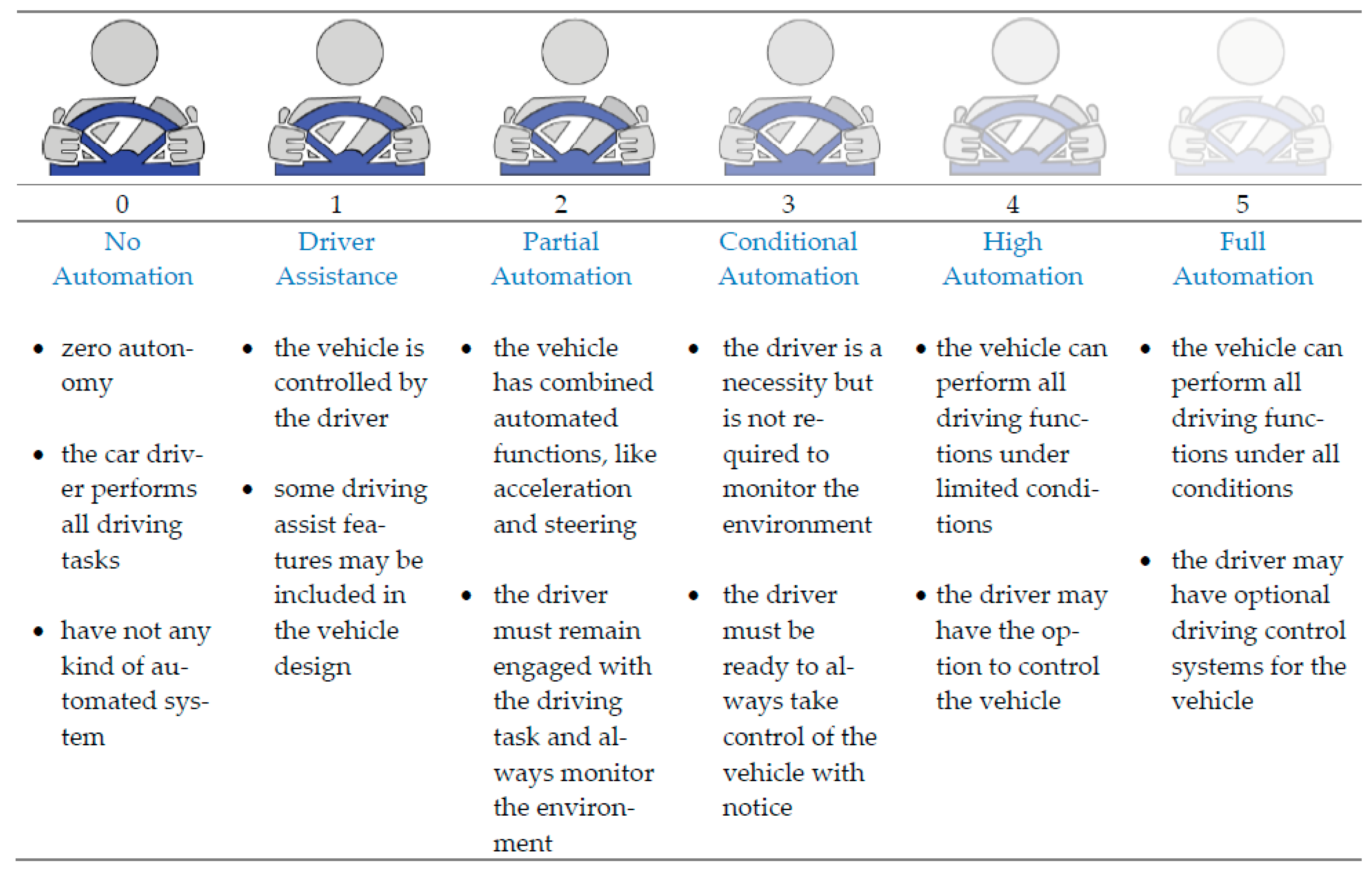
- Society of Automotive Engineers. 2019. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 7 January 2023).
- Schlosser, J.; Chow, C.K.; Kira, Z. Fusing LIDAR and images for pedestrian detection using convolutional neural networks. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2198–2205. [Google Scholar] [CrossRef]
- Wagner, J.; Fischer, V.; Herman, M.; Behnke, S. Multispectral Pedestrian Detection Using Deep Fusion Convolutional Neural Networks. In Proceedings of the 24th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), Bruges, Belgium, 27–29 April 2016; pp. 509–514. [Google Scholar]
- Du, X.; Ang, M.H.; Rus, D. Car detection for autonomous vehicle: LIDAR and vision fusion approach through deep learning framework. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Vancouver, BC, Canada, 2017; pp. 749–754. [Google Scholar] [CrossRef]
- Melotti, G.; Premebida, C.; Goncalves, N.M.M.D.S.; Nunes, U.J.C.; Faria, D.R. Multimodal CNN Pedestrian Classification: A Study on Combining LIDAR and Camera Data. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3138–3143. [Google Scholar] [CrossRef]
- Hou, Y.-L.; Song, Y.; Hao, X.; Shen, Y.; Qian, M.; Chen, H. Multispectral pedestrian detection based on deep convolutional neural networks. Infrared Phys. Technol. 2018, 94, 69–77. [Google Scholar] [CrossRef]
- Gu, S.; Lu, T.; Zhang, Y.; Alvarez, J.M.; Yang, J.; Kong, H. 3-D LiDAR + Monocular Camera: An Inverse-Depth-Induced Fusion Framework for Urban Road Detection. IEEE Trans. Intell. Veh. 2018, 3, 351–360. [Google Scholar] [CrossRef]
- Shopovska, I.; Jovanov, L.; Philips, W. Deep Visible and Thermal Image Fusion for Enhanced Pedestrian Visibility. Sensors 2019, 19, 3727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Caltagirone, L.; Bellone, M.; Svensson, L.; Wahde, M. LIDAR–camera fusion for road detection using fully convolutional neural networks. Robot. Auton. Syst. 2018, 111, 125–131. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Morel, O.; Blanchon, M.; Seulin, R.; Rastgoo, M.; Sidibé, D. Exploration of Deep Learning-based Multimodal Fusion for Semantic Road Scene Segmentation. In Proceedings of the VISAPP 2019 14Th International Conference on Computer Vision Theory and Applications, Prague, Czech Republic, 25–27 February 2019; pp. 336–343. [Google Scholar] [CrossRef]
- Minto, M.R.I.; Tan, B.; Sharifzadeh, S.; Riihonen, T.; Valkama, M. Shallow Neural Networks for mmWave Radar Based Recognition of Vulnerable Road Users. In Proceedings of the 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020; pp. 1–6. [Google Scholar]
- Zhang, Y.; Zhao, Y.; Lv, H.; Feng, Y.; Liu, H.; Han, C. Adaptive Slicing Method of the Spatiotemporal Event Stream Obtained from a Dynamic Vision Sensor. Sensors 2022, 22, 2614. [Google Scholar] [CrossRef]
- Ranyal, E.; Sadhu, A.; Jain, K. Road Condition Monitoring Using Smart Sensing and Artificial Intelligence: A Review. Sensors 2022, 22, 3044. [Google Scholar] [CrossRef]
- Ghandorh, H.; Boulila, W.; Masood, S.; Koubaa, A.; Ahmed, F.; Ahmad, J. Semantic Segmentation and Edge Detection—Approach to Road Detection in Very High Resolution Satellite Images. Remote. Sens. 2022, 27, 613. [Google Scholar] [CrossRef]
- Wang, J.; Fu, T.; Xue, J.; Li, C.; Song, H.; Xu, W.; Shangguan, Q. Realtime wide-area vehicle trajectory tracking using millimeter-wave radar sensors and the open TJRD TS dataset. Int. J. Transp. Sci. Technol. 2022, 12, 273–290. [Google Scholar] [CrossRef]
- Stettner, R. Compact 3D Flash Lidar Video Cameras and Applications. Laser Radar Technol. Appl. XV 2010, 7684, 39–46. [Google Scholar]
- Laganiere, R. Solving Computer Vision Problems Using Traditional and Neural Networks Approaches. In Proceedings of the Synopsys Seminar, Embedded Vision Summit, Santa Clara, USA, 20–23 May 2019; Available online: https://www.synopsys.com/designware-ip/processor-solutions/ev-processors/embedded-vision-summit-2019.html#k (accessed on 7 January 2023).
- Soderman, U.; Ahlberg, S.; Elmqvist, M.; Persson, A. Three-dimensional environment models from airborne laser radar data. Laser Radar Technol. Appl. IX. 2004, 5412, 333–334. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Ye, Y.; Chen, H.; Zhang, C.; Hao, X.; Zhang, Z. Sarpnet: Shape Attention Regional Proposal Network for Lidar-Based 3d Object Detection. Neurocomputing 2020, 379, 53–63. [Google Scholar] [CrossRef]
- Rovero, F.; Zimmermann, F.; Berzi, D.; Meek, P. Which camera trap type and how many do I need? A review of camera features and study designs for a range of wildlife research applications. Hystrix 2013, 24, 148–156. [Google Scholar] [CrossRef]
- Nabati, R.; Qi, H. Radar-Camera Sensor Fusion for Joint Object Detection and Distance Estimation in Autonomous Vehicles. arXiv 2020, arXiv:2009.08428. [Google Scholar]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-Sensor Fusion in Automated Driving: A Survey. IEEE Access 2019, 8, 2847–2868. [Google Scholar] [CrossRef]
- Heng, L.; Choi, B.; Cui, Z.; Geppert, M.; Hu, S.; Kuan, B.; Liu, P.; Nguyen, R.; Yeo, Y.C.; Geiger, A.; et al. Project AutoVision: Localization and 3D Scene Perception for an Autonomous Vehicle with a Multi-Camera System. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 4695–4702. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Royo, S.; Ballesta-Garcia, M. An Overview of Lidar Imaging Systems for Autonomous Vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef] [Green Version]
- Huang, K.; Shi, B.; Li, X.; Li, X.; Huang, S.; Li, Y. Multi-Modal Sensor Fusion for Auto Driving Perception: A Survey. arXiv 2022, arXiv:2202.02703. [Google Scholar]
- Burnett, K.; Wu, Y.; Yoon, D.J.; Schoellig, A.P.; Barfoot, T.D. Are We Ready for Radar to Replace Lidar in All-Weather Mapping and Localization? IEEE Robot. Autom. Lett. 2022, 7, 10328–10335. [Google Scholar] [CrossRef]
- Muresan, M.P.; Giosan, I.; Nedevschi, S. Stabilization and Validation of 3D Object Position Using Multimodal Sensor Fusion and Semantic Segmentation. Sensors 2020, 20, 1110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pishro-Nik, H. Introduction to Probability, Statistics, and Random Processes. Available online: http://math.bme.hu/~nandori/Virtual_lab/stat/dist/Mixed.pdf (accessed on 8 January 2023).
- Qi, C.R.; Liu, W.; Wu, C.; Su, H.; Guibas, L.J. Frustum PointNets for 3D Object Detection from RGB-D Data. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 918–927. [Google Scholar]
- Papernot, N.; McDaniel, P.; Wu, X.; Jha, S.; Swami, A. Distillation as a Defense to Adversarial Perturbations Against Deep Neural Networks. In Proceedings of the 2016 IEEE Symposium on Security and Privacy (SP), Jose, CA, USA, 22–26 May 2016; pp. 582–597. [Google Scholar] [CrossRef] [Green Version]
- Fu, Y.; Li, C.; Yu, F.R.; Luan, T.H.; Zhang, Y. A Decision-Making Strategy for Vehicle Autonomous Braking in Emergency via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 5876–5888. [Google Scholar] [CrossRef]
- Aradi, S. Survey of Deep Reinforcement Learning for Motion Planning of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 23, 740–759. [Google Scholar] [CrossRef]
- Xia, W.; Li, H.; Li, B. A Control Strategy of Autonomous Vehicles Based on Deep Reinforcement Learning. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; Volume 2, pp. 198–201. [Google Scholar]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. uuScenes: A Multimodal Dataset for Autonomous Driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 11621–11631. [Google Scholar]
- Analytics Indian Magazine. 2020. Available online: https://analyticsindiamag.com/top-10-popular-datasets-for-autonomous-driving-projects/ (accessed on 8 January 2023).
- Nanda, A.; Puthal, D.; Rodrigues, J.J.; Kozlov, S.A. Internet of Autonomous Vehicles Communications Security: Overview, Issues, and Directions. IEEE Wirel. Commun. 2019, 26, 60–65. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | AVs | CAVs |
|---|---|---|
| Intelligence | SVI | CVI |
| Networking | Sensor’s network | Wireless communication network |
| Range | Approximately 250 m | 300 m (DSRC) to 600 m (NR-V2X) |
| Communication | Object sense by the sensors | Node-to-node communication |
| Reliability | Reliable (Not exactly defined) | 95% (LTE-V2X), 99.999% (NR-V2X) |
| Latency | No deterministic delay | Less than 3 ms (LTE-V2X) |
| Direction | Unidirectional | Multidirectional |
| Data rate | N/A | >30 Mbps |
| Year | Paper | AV Applications | Sensors |
|---|---|---|---|
| 2016 | Schlosser et al. [35] | Pedestrian detection | Vision and LiDAR |
| 2016 | Wagner et al. [36] | Pedestrian detection | Vision and Infrared |
| 2017 | Du et al. [37] | Vehicle detection, lane detection | Vision and RADAR |
| 2018 | Melotti et al. [38] | Pedestrian detection | Vision and LiDAR |
| 2018 | Hou et al. [39] | Pedestrian detection | Vision and Infrared |
| 2018 | Gu et al. [40] | Road detection | Vision and LiDAR |
| 2018 | Hecht et al. [10] | Road detection | LiDAR |
| 2018 | Manjunath et al. [14] | Object detection | RADAR |
| 2019 | Shopovska et al. [41] | Pedestrian detection | Vision and Infrared |
| 2019 | Caltagirone et al. [42] | Road detection | Vision and LiDAR |
| 2019 | Zhang et al. [43] | Road detection | Vision and Polarization camera |
| 2019 | Crouch et al. [9] | Velocity detection | LiDAR and RADAR |
| 2020 | Minto et al. [44] | Object detection | RADAR |
| 2021 | Chen et al. [12] | Object detection | Vision and LiDAR |
| 2022 | Zhang et al. [45] | Object detection | Vision |
| 2022 | Ranyal et al. [46] | Road detection | Vision |
| 2022 | Ghandorh et al. [47] | Road detection | Vision |
| 2023 | Wang et al. [48] | Vehicle detection, lane detection | RADAR |
| This paper | All obstacles detection, localization, and AI networking | Sensor fusion with traffic surveillance camera | |
| Sensors | Pros | Cons |
|---|---|---|
| Camera |
|
|
| LiDAR |
|
|
| RADAR |
|
|
| Ultrasonic Sensor |
|
|
| Issues | Conventional AV Detection | Proposed FSCDS |
|---|---|---|
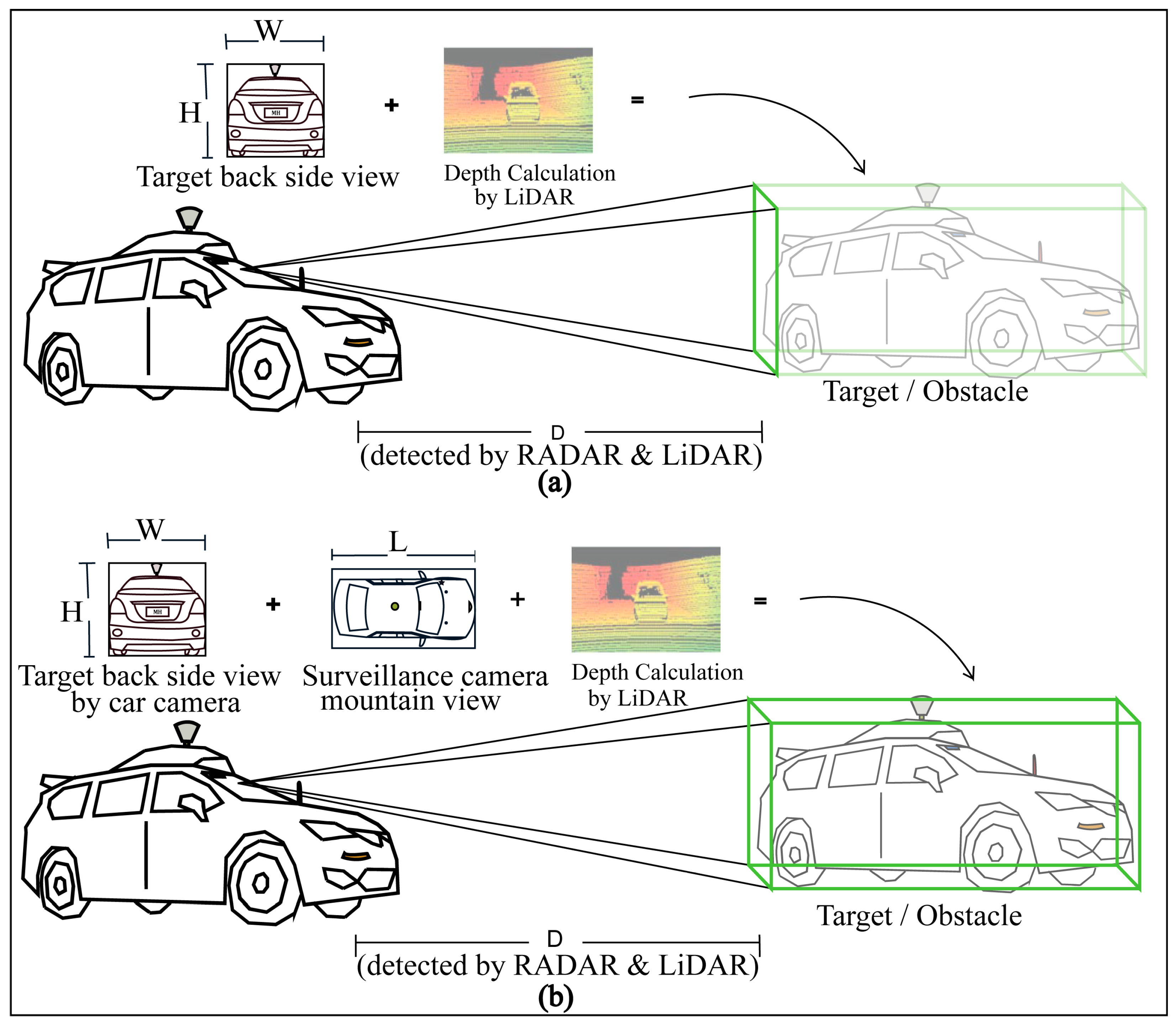
| 4D detection for localization and positioning | Partially possible by AV’s sensors (camera, RADAR, and LiDAR). | Figure 7 and Figure 13 show how the proposed FSCDS perfectly detects the 4D position and exact localization for AVs. |
| Real-time ground preconception for smart detection assistance | Not available (GPS detection preconception assistance is not enough, even not applicable at every location and all-weather conditions). | Before starting the AV fusion sensing function, the FSCDS model provides a preconception about sensing ground that assists to prevent error sensing. |
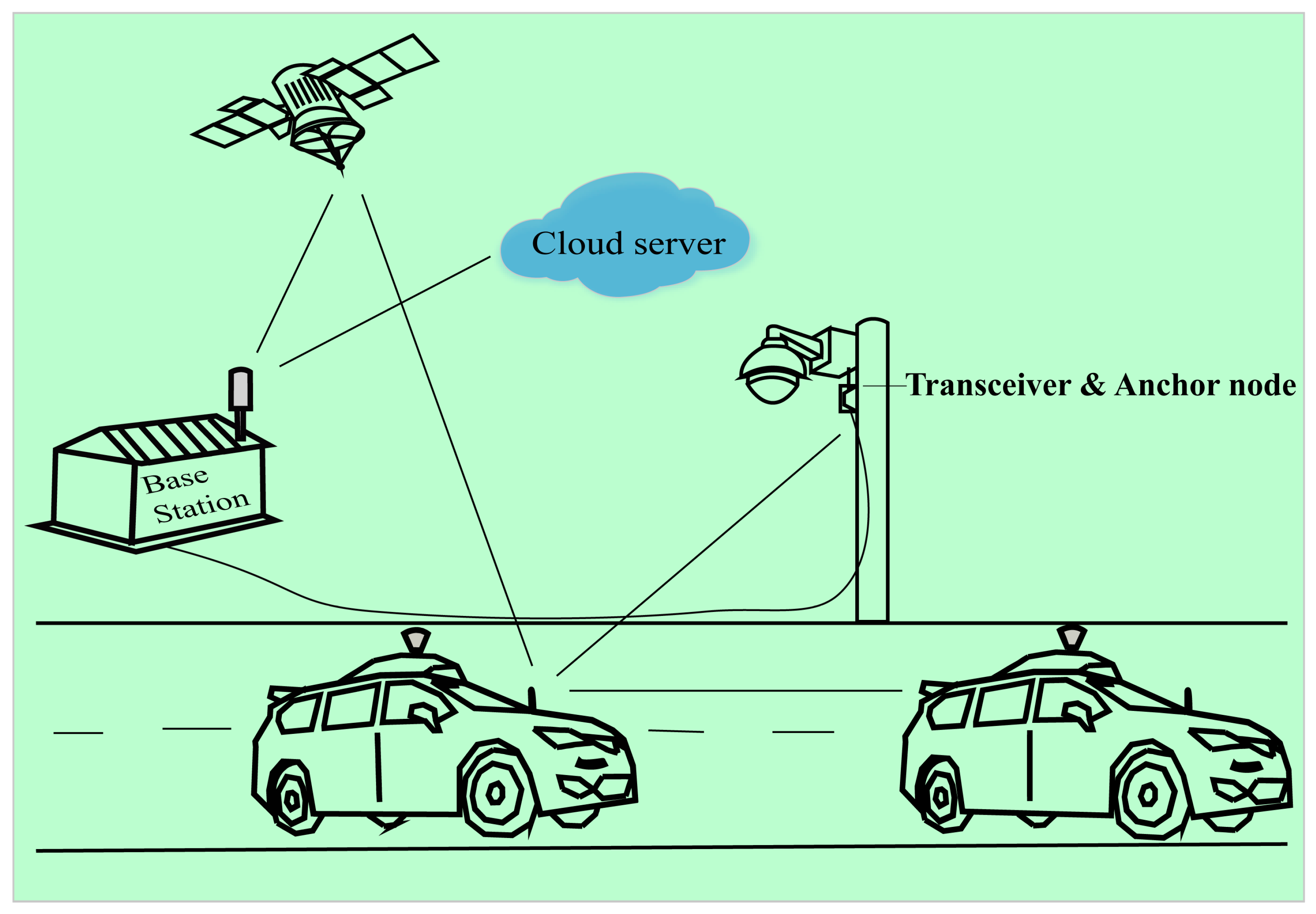
| AV efficiently remote monitoring and control | The smart GPS system is used for satellite AV monitoring, but the satellite signal is attenuated by obstacles and does not work properly in harsh weather. (GPS positioning horizontal accuracy 3 m [15]). | By fitting anchor nodes with surveillance cameras and establishing wireless networking (Figure 9) between the AV and node to the base station, FSCDS establishes a strong real-time remote monitoring and control system. |
| Working (networking) availability in the tunnel or underwater road | Indoor working efficiency is not enough for signal attenuation. | FSCDS’s working efficiency is equally best both on highway and tunnel roads. |
| Point cloud 3D object modeling | Efficient [64]. | FSCDS is more efficient because of the exact 4D detection (Figure 13) system. |
| The data rate for users | Conventional data rate [71]. | In FSCDS, high-speed data communication is possible for AV users because of CNN and smart AI networking in the proposed communication system. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasanujjaman, M.; Chowdhury, M.Z.; Jang, Y.M. Sensor Fusion in Autonomous Vehicle with Traffic Surveillance Camera System: Detection, Localization, and AI Networking. Sensors 2023, 23, 3335. https://doi.org/10.3390/s23063335
Hasanujjaman M, Chowdhury MZ, Jang YM. Sensor Fusion in Autonomous Vehicle with Traffic Surveillance Camera System: Detection, Localization, and AI Networking. Sensors. 2023; 23(6):3335. https://doi.org/10.3390/s23063335
Chicago/Turabian StyleHasanujjaman, Muhammad, Mostafa Zaman Chowdhury, and Yeong Min Jang. 2023. "Sensor Fusion in Autonomous Vehicle with Traffic Surveillance Camera System: Detection, Localization, and AI Networking" Sensors 23, no. 6: 3335. https://doi.org/10.3390/s23063335