1. Introduction
The Non-Orthogonal Multiple Access (NOMA) system has been characterized as an inspiring multiple access form for upcoming wireless approaches to enhance the spectral efficiency and throughput [
1]. NOMA system can develop the available resources more realistically by efficiently, taking into consideration the users’ channel environments and also giving support to several users with distinctive Quality of Service (QoS) needs [
2]. The integration of NOMA and multiple antenna techniques can be exploited to improve and reinforce system performance [
3], therefore, inspecting Multiple Input-Single Output (MISO) NOMA system can be a good example in the direction of characterizing the expected upgrade in achievable data rates [
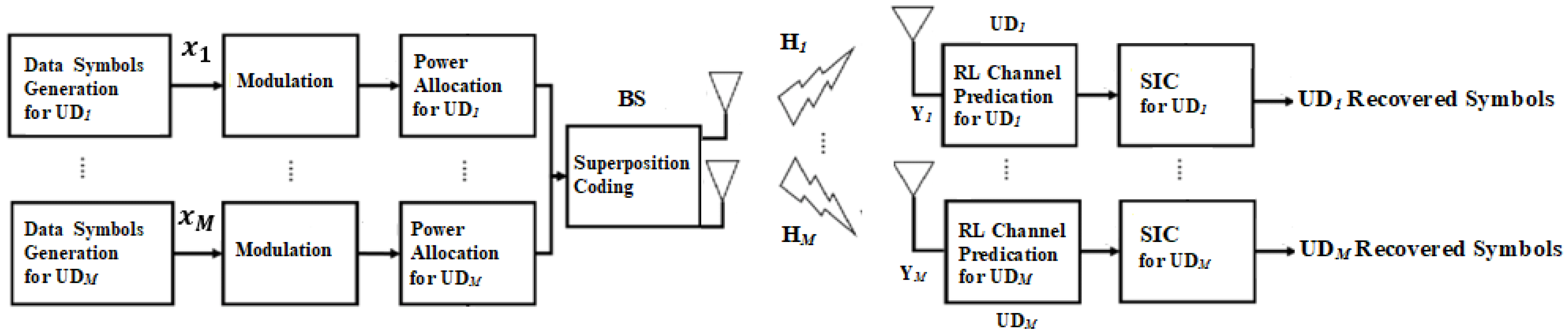
4]. In downlink NOMA structure, the receiver device can receive a multiplexing of signals transmitted to several user terminals in the NOMA cell, thus eliminating the interference generated by other user devices come to be essential for coordinated detection. Frequently in power domain NOMA (PD-NOMA), multiuser detection can be handled via successive interference cancellation (SIC) [
5]. In the SIC procedure, symbols from numerous users are decoded successively on the basis of the Channel State Information (CSI) and power percentage designated for each user. A broad investigation of CSI for various users is demanding because pilot data that can be exploited in channel prediction, might interfere with symbols from other user terminals, therefore affecting the performance of a conventional prediction scheme, such as the Minimum Mean Square Error (MMSE) estimator [
6]. Furthermore, power allocation policy is considered an essential issue for user devices when PD-NOMA is considered [
7].
Deep Learning (DL) or Reinforcement Learning (RL) techniques, have the ability to track the differences in the channels among users and BS, thus, they are recently considered a powerful tool for upcoming radio systems [
8,
9]. Hence, allocating the power factors or estimating the CSI for user devices with the assistance of Machine Learning (ML) algorithms, triggered the authors for more deep investigations into this field in order to enhance the performance and detection process.
1.1. Related Works
Different techniques were introduced by authors in [
10] to realize the optimal MMSE channel estimator in the Reconfigurable Intelligent Surfaces (RIS)-based MISO system. In the first technique, the authors suggest an analytical linear estimator to adjust the phase shift matrix of the RIS during the training phase, and the estimator based on that technique is shown to produce sensible accuracy compared to the least-squares method when the statistical properties of the applied channel and noise are considered. In the other approach, authors have expressed the channel prediction problem as an image denoising problem, then they introduce a Convolutional Neural Network (CNN) to achieve the denoising and predict the optimal MMSE channel parameters. Numerical outcomes have clarified that the proposed estimator based CNN algorithm can offer improved performance compared to the linear estimation method and low computational intricacy is preserved.
Toward enhancing the link reliability, a neural network model for a wireless channel estimator is proposed in [
11] to be used with uncoded space-time diversity procedure in Multi Input Multi Output (MIMO) system. Based on the neural network ML structure, a channel estimator is suggested, and a mathematical scheme is presented to derive an optimum power transmission factors that can assist in lessening the channel prediction bandwidth utilization. Simulation results revealed that the channel estimator based on the proposed neural network structure can deliver an improvement in Bit Error Rate (BER) and Mean Square Error (MSE) compared to the standard MMSE channel estimation technique.
In a massive MIMO system and on the basis of a deep autoencoder scheme, authors in [
12] performed experimental verifications on two tasks, one task for channel estimation modelling for wireless links, and the other task is belonging to a power allocation policy. The proposed deep learning autoencoder is also used to manage the issue raised from inadequate training datasets that may cause critical overfitting problems and consequently affect the model’s reliability. Results based on the autoencoder procedure clarified that the suggested scheme could successfully enhance performance when the extent of the training dataset is mainly within a specified threshold selection.
To get over limitations raised when standard iterative power control techniques are utilized, such as high complexity and unnecessary latency, the work in [
13] introduced a deep learning framework to manage these issues. In the presented structure, the outdated and partial CSI is exploited, and a Deep Neural Network (DNN) framework is created to construct an optimization problem to boost the spectral efficiency in device-to-device communication systems. User fairness and energy efficiency constraints were examined, and simulation outcomes showed that the proposed DNN model can attain better spectral and energy efficiency compared to the MMSE procedure when numerous channel correlation factors are considered.
Based on CSI, the position of each user device with respect to BS, and the path loss, a deep learning framework labelled PowerNet is introduced in [
14]. The authors attempt to prove that it is possible to avoid the time consumption involved with intricate channel estimation procedures, and at the same time, power control can be managed. Different from traditional DNNs that employ a fully connected structure, the presented PowerNet method utilizes a CNN layers to recognize the interference model through several links in wireless networks. Simulation outcomes revealed that the suggested PowerNet scheme can realize a stable performance without explicit channel estimation.
Recently, approximating the channel parameters or predicting the power factors with the assistance of Reinforcement learning (RL), is investigated by many researchers. The authors of [
15] proposed an end-to-end channel estimation framework for a downlink multiuser multiple antenna system. The authors presented an RL-based actor-critic scheme for channel estimation without the assumption of ideal CSI. The authors mainly depend on the agent to bring and utilize the pilot symbols into the estimation process and then employ the estimated channel parameters to create downlink beamforming matrices. To satisfy the purpose of maximizing the sum rate reward, network parameters are adjusted based on the deep policy gradient method. The results proved that the suggested channel estimation algorithm can provide convergence and stable performance under various channel statistics and can perform better than the typical MMSE procedure when the sum rate metric is examined.
In [
16], the authors developed a Deep Reinforcement Learning (DRL) method for device-to-device pairing to understand the correlation patterns between wireless networks. The introduced RL algorithm is adopted to explore the joint channel selection and power control problem for device-to-device pairing and to boost the weighted sum rate. Based on the suggested DRL learning procedure, each device-to-device pair can make use of the outdated and local information to understand the network parameters and perform decisions independently. Results showed that without a global CSI, the suggested DRL scheme is capable to attain a stable performance close to that achieved using standard analytical approaches.
The combination between a DNN as a tool for channel prediction and an optimized power scheme is explored in [
17] for the purpose of multiuser detection in the NOMA system. The DNN based Long Short-Term Memory (LSTM) network is developed for channel prediction based on complex data processing. The DNN network is trained on the basis of both the correlation between successive training sequences and the normalised channel statistics. The efficiency of the suggested DNN based LSTM for channel prediction is inspected using different fading models and simulation outcomes, in terms of different performance metrics, have proved that the presented DNN scheme for channel estimation can provide a consistent performance compared to the MMSE procedure even when cell capacity is expanded.
1.2. Research Gap and Significance
Based on the preceding works, many of the proposed schemes that consider predicting the channel parameters task are mainly focused on implementing several deep neural networks (DNN) while applying RL approaches, which in turn leads to an increase in the number of hidden layers with a massive number of neurons in each layer. The significance of this study is to illuminate that we can eliminate the need for such DNN approaches, and instead, we can adopt the RL based developed Q-learning algorithm to predict the channel coefficients for each user device in MISO-NOMA cell, and at the same time, a notable improvement in system performance and network convergence is realized. The most prominent gain of the developed channel estimator scheme is that it can enhance the system performance without the need for hidden layers or an external training set.
In addition, several RL algorithms have been proposed to explicitly address the issues associated with channel state information (CSI), beamforming, and power allocation. To the best of the authors’ knowledge, there is no study that explores the incorporation between Q-learning algorithm for channel prediction and the power allocation policy as an integrated scheme for multiuser detection in downlink MISO-NOMA system in fading channels.
Furthermore, it is worth mentioning that unlike deep learning algorithms, that mainly depend on learning from a training data set, the proposed Q-learning algorithm in our study is developed to dynamically enhance the system performance and adjust to the variations in the channel based on the feedback from the environment.
1.3. Contributions to Knowledge
The channel prediction problem in downlink NOMA systems was considered in numerous works. In addition, there have been several works that apply machine learning (ML) to handle the channel estimation task in wireless communication systems. However, most of the current research on channel prediction in the NOMA systems based on ML is introduced via deep neural networks. To the best of the author’s knowledge, currently, there is no research that manages the channel approximation task in a multiuser multi-input single-output NOMA system through an RL based Q-learning algorithm. The RL based Q-learning algorithm is developed based on maximizing the sum rates for all users in the network such that it can be used efficiently to predict the channel parameters for each user in the MISO-NOMA cell.
In addition, in this work, a structured mathematical analysis is introduced to formulate a non-complex analytical form for the power allocation for user devices in the examined MISO-NOMA system based on boosting the sum rate of the system while considering the constraints of the total power budget in the system, and the QoS for each user. Furthermore, the performance of the MISO-NOMA system is investigated when both the developed Q-learning algorithm for channel estimation and the derived power allocation scheme are jointly implemented. In this work, the contributions can be summed up as shown:
In this study, a framework is proposed to illuminate how RL based Q-learning algorithm is developed based on maximizing the sum rates for all users in a MISO-NOMA system in order that it can be used dynamically to predict the channel parameters for each user in the MISO-NOMA cell.
As a reference comparison, four further simulation environments are established. (1) the standard minimum mean square error (MMSE) based channel prediction scheme (Neumann et al.); (2) the DNN algorithm based on LSTM network for channel prediction applied in [
17], (3) the RL based actor-critic procedure for channel prediction applied in [
15], (4) the fourth simulation environment is dependent on applying RL based State-Action-Reward-State-Action (SARSA) procedure (Ahsan et al. and Mu et al.). The simulation outcomes of these environments are compared with the results of our proposed RL based Q-learning scheme, and the results emphasized that dependability can be assured by our developed Q-model for predicting channel parameters even when the number of devices in the cell is increased.
To validate the efficacy of the developed Q-learning algorithm for channel prediction, the developed Q-model is investigated using Rayleigh and Rician fading channels.
Evaluate the beneficial impact of cooperatively integrating the RL based Q-learning algorithm for channel prediction and the derived power allocation scheme for the purpose of multiuser recognition in the power domain MISO-NOMA system.
The optimized power allocation scheme and the fixed power allocation scheme are both compared when the developed Q-learning scheme is implemented as a channel estimator.
The remainder of this paper is structured as follows.
Section 2 describes the system model. Analysis of the optimization problem is presented in
Section 3. The optimization framework and procedure are discussed in
Section 4. The RL structure is introduced in
Section 5.
Section 6 discusses the Q-learning algorithm-based channel prediction. The RL-based Q-model architecture and channel estimation algorithm are summarized in
Section 7. The simulation environment is described in
Section 8, and simulation results are presented in
Section 9. Lastly, conclusions are shown in
Section 10.
Notation: bold lower-case letters denote vectors, bold upper-case letters denote matrices, and lower-case letters denote scalars. The subscript on a lower-case letter represent ith element of vector . refers to the expectation and (·)T refers to the transpose of the vector. For two real numbers a ≤ b, [a, b] is the set for all real numbers in the range from a to b.
4. Optimization Framework
The main aims in this part include the following: (1) present the objective function and the constraints in a standard form, (2) find a general expression for the 1st and 2nd derivative of the objective function, (3) based on the mathematical analysis and the derived formulas, we can inspect that is a negative function, which validates that the objective function is a concave with distinctive global maximum, and (4) finally, we deduce the optimal power factors for each user based on applying the Lagrange function and the KKT necessary conditions.
On the basis of the objective function in (16) and the constraints in (17) & (19) and the fact that there are two antennas at the BS and one antenna at each user terminal, the standard optimization problem can be generally reformulated as follows [
24,
25]:
such that
In this part, the power optimisation framework is accomplished with regards to three user devices in the MISO-NOMA cell, therefore, the examined constraints can be represented as shown [
25,
26]:
Since the constraints are linear in terms of , they are considered convex.
Typically, to prove that the objective function
is concave with a distinctive global maximum, we need to find the first derivative
and the second derivative
of the objective function [
3,
24]. The first derivative of the objective function can be deuced in general form as follows [
23]:
Similarly, the second derivative of the objective function can be derived in general form as follows [
23,
24]:
Based on the above mathematical analysis and the derived formulas, we can inspect that
is a negative function, which verifies that the objective function is a concave with a distinctive global maximum [
3,
24,
27]. To derive the optimal power factors, the Lagrange function and the KKT necessary conditions can be applied [
28].
where
and
represent Lagrange multipliers for the 3 users’ scenario.
Optimality conditions can be written as follows [
3,
24,
27]:
Given the fact that
, we can demonstrate that the analyzed constraints are feasible [
3] and after a few mathematical manipulations the closed form for the power factors
,
, and
can be deduced as follows [
27]:
5. Reinforcement Learning Framework
Typically, RL is developed on the basis of a Markov Decision Process (MDP) design, that contains basic elements [
29,
30]: a state space ‘
S’, which is the set of states or observations in the environment and these states can be observed by the agent. An action space ‘
A’, which is the set of actions that can be selected by the agent at each state. An instantaneous reward ‘
R’, which is the direct reward that is given to the agent after selecting an action
to transfer to a state
. Policy ‘
P’ represents the mapping criteria to move from the current observed state to a new state based on the action that will be taken by an agent. Another important element in the RL process is the State-action value function
, which is formally described as the expectation or the average of cumulative discounted rewards when an action
a ∈
A is selected by an agent in the state
s ∈
S when a certain policy is considered. Furthermore, RL can be considered a method of understanding the agent’s interaction in a stochastic environment by successively selecting actions during a sequence of time periods. Therefore, the main aim of reinforcement learning is to train an agent to carry out a certain task within an uncertain environment [
30].
The interaction between the agent and the environment can be described as follows: at each time period, the agent can recognize the observations or states in the environment, and based on the current observation, the agent can identify and carry out a specific action. Then, an immediate reward will be sent from the environment to the agent. The reward is a measure of how effective the action is, when the agent performs a certain action to achieve a specific goal [
31]. Basically, at each learning time interval, the RL agent interacts with the environment by following a particular policy that controls the transition between state space to action space.
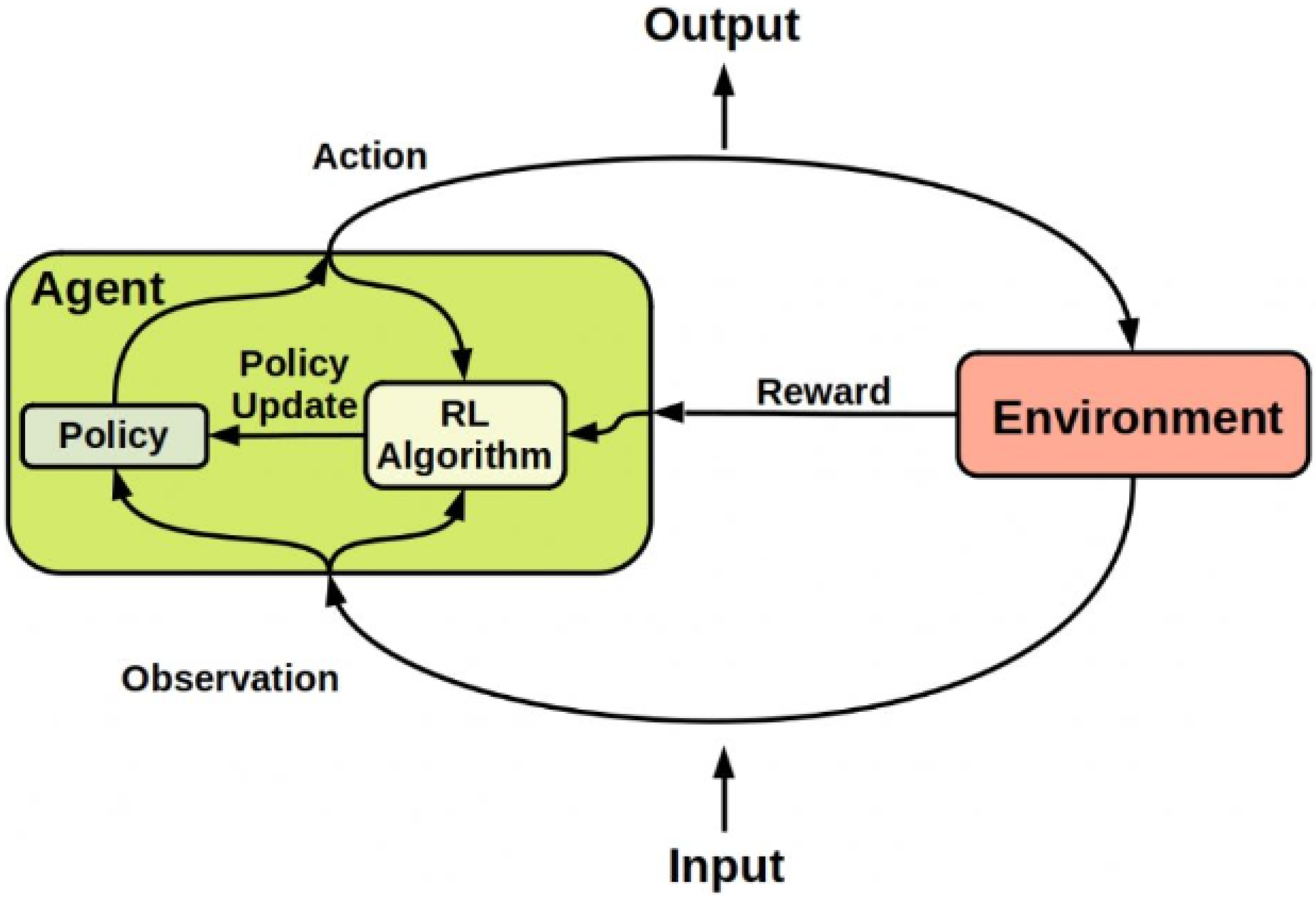
Based on the aforementioned discussion and as shown in
Figure 2, the RL agent can be essentially represented by two elements: a policy and a learning algorithm [
32]. The policy is the mapping criterion that chooses actions on the basis of the observations or status observed in the environment. Usually, the policy can be represented as a function with tunable parameters, such as DNN, while the learning algorithm constantly improves the parameters of the policy based on observations, actions, and rewards [
33]. In general, the objective of the learning algorithm is to realize the best possible policy that can maximize the expected cumulative long-term reward received during the task.
6. Channel Estimation Based Q-Learning Algorithm
In the considered channel prediction scheme, it is assumed that the action spaces are discrete, therefore, we manage to use an RL-based Q-learning procedure as one of the candidates of RL schemes for parameters update in our examined cell [
34,
35]. The Q-learning algorithm is categorized as a model-free, and off-policy reinforcement learning procedure, also a Q-learning agent is characterized as a value-based RL agent that has the role of updating a specific critic value function to enhance the future rewards. At a certain state, the agent can inspect and select the action for which the expected reward is maximized. In this section, RL based Q-learning is employed for channel prediction tasks in the MISO-NOMA cells where pilot symbols are also adopted to assist in the channel estimation process [
36]. Therefore, it is assumed that there is coordination between BS and user devices such that the pilot symbols can be recognized at the BS and user terminals. In our work, we have considered the BS as the Q-learning agent, and we assume that the BS will start estimating the channel parameters for each user after user devices complete sending the pilot signals [
37]. Therefore, in our developed RL based Q-learning algorithm can be utilized to estimate the CSI after the BS receives the pilot signals.
The scenario for the channel prediction process based on the developed Q-learning model can be outlined in this way [
38]. Firstly, at the start of each transmission time slot, user devices can send pilot symbols to BS across the uplink channel. Secondly, on the basis of the developed RL based Q-learning algorithm and availability of network information such as user’s distance and path loss, BS (agent) can predict the downlink CSI for user devices. Thirdly, BS will generate the superposition coding signal and performs downlink data transmission. Finally, the receiver of each user terminal will receive the downlink transmitted data and the estimated channel parameters based on Q-learning algorithm will be utilized to decode the desired signal. In addition, each user device can feedback the signal-to-interference plus noise ratio (SINR) or the achieved rate to the BS to enhance the detection process.
In this study, the main objective of the developed RL based Q-learning algorithm is to maximize the downlink sum rate and reduce the estimation loss. Instead of estimating the received signal, we primarily concentrate on incorporating the developed Q-learning model in the NOMA system for the purpose of channel estimation [
39]. The RL-based Q-agent is designed to estimate the channel parameters by interacting with the environment, hence strict orthogonal pilot symbols are not required as shown in the standard procedures. Throughout the learning iteration, the Q-learning agent decides on the action that can enhance the approximated state-action value function
therefore, the expected long-term reward can be also maximized in the neural networks. It is worth mentioning that when increasing the number of learning iterations, updating Q-values becomes more sufficient, and an improved channel approximation and sum rate reward can also be achieved [
34,
36,
40].
In the proposed Q-learning scheme, the sum rate is presented at the learning time interval
t as
, hence, the instantaneous sum rate at time instant
t can be shown as follows [
15,
34]
where
is the signal-to-interference plus noise ratio of user
i at time instant
t and
is the number of users in the MISO-NOMA cell. In this work, the optimum goal of the developed
Q-learning algorithm is to maximize the total discounted reward
starting from time instant
t, which can be denoted as
where
is the discounted reward at time slot
t, and
is the discount factor. Substituting the sum rate from (33) into (34), the discounted sum rate reward, can be expressed as [
41]:
As previously stated, the Q-learning agent is the BS, whose aim is to boost the accumulative transmission sum rate. Therefore, two value functions can be inspected while considering the RL maximization problem [
34,
36,
42], the first one is the state value function
and the other one is the state-action value function
where
denotes the expected value given that the agent follows a certain policy within the applied procedure. Due to unspecified transition probabilities and limited observed states, an optimal policy is difficult to achieve. Therefore, the
Q-learning procedure is developed to approximately achieve the best possible policy. In the developed
Q-learning procedure, the state-action value function
values are learned via trial and error and are updated according to the following formula [
15,
34,
36,
42]:
where
is the learning rate,
denotes the new state, and
is the new action that will be considered by the agent from the action space
to maximize the new state-action value function
.
7. Q-Learning Network Architecture
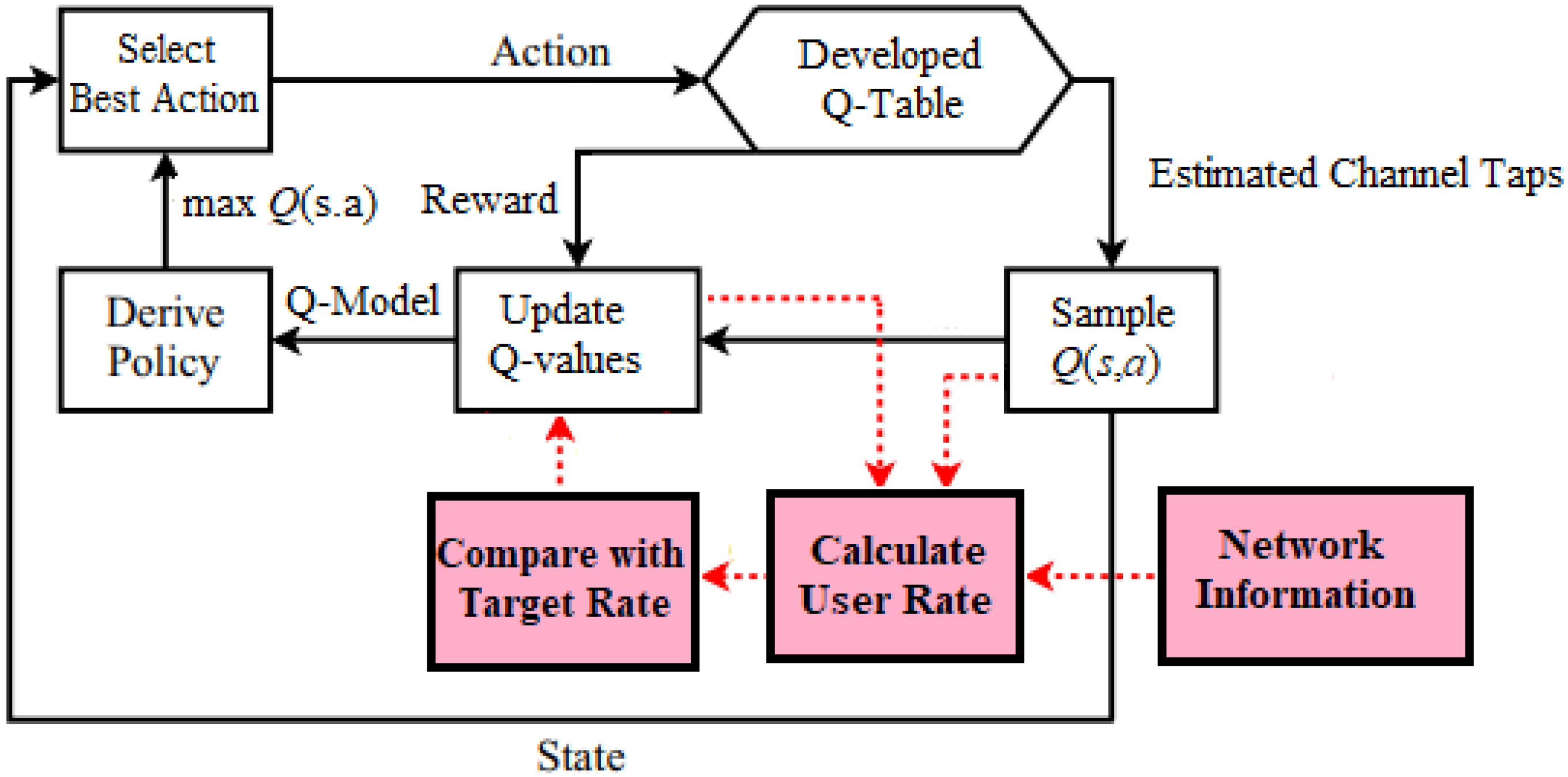
Basically, in data transmission, the frame transmitted includes data and pilot symbols. It is supposed that the implemented channel model is stationary throughout one frame transmission of data and pilot signals and the channel parameters are varying from one frame to another. The basic architecture of the channel prediction scenario based on the developed
Q-learning procedure employed in our examined network is illustrated in
Figure 3, which primarily consists of several stages [
17,
43].
In the first stage, initial channel parameters will be created based on a distinct Rayleigh channel models. In the second stage, we initialize the Q table and initialize the reward matrix R with zero values. The signal-to-interference plus noise ratio (SINR), and the minimum required rate , can be calculated for every user device in the MISO-NOMA cell with the aid of the availability of the network information such as the initial assigned power percentage for each user terminal, and the entire power transmitted from BS . Primarily, the Q-values can be adjusted based on the difference between the assigned target rate and the initial generated user rate for each device. In the third stage, the best action will be explored and implemented by the Q agent, and then updating the values for the Q-table that represent the observation action pair . Furthermore, the values for the reward matrix R will be dynamically assigned according to the actions executed by the Q-agent.
In the fourth stage, the state action value function that represent the values for the Q-table will be modified according to a Q-learning procedure with the aid of the following parameters, the discount factor , the assigned immediate reward matrix , and the learning rate . Throughout the learning phase, the generated state action values will be sampled to calculate the new channel rate and at the same time update the Q-table until the optimum rate or the terminal state is achieved.
Dataset Preparation
Essentially, path loss and the distance between every user terminal and the BS need to be specified in the dataset to facilitate the random generation of the channel weights for every user device in the examined MISO-NOMA network [
43]. In the beginning, pilot symbols are created, transmitted, and identified at the BS and at the receiver of every device. Additionally, power factors for every device in the cell need to be initially assigned. The channel weights for every device in the cell are initialized to set up the Q-table values, and during the algorithm iterations, the Q-values are modified according to a Q-learning procedure [
34,
35,
36].
Throughout the learning process and for the sake of updating the
Q-table, the discount factor
, learning rate
, the target rate
, current state, and the terminal state should be identified. In our developed Q-learning algorithm, the Q-agent will choose the next state at random and set it as the next state, then the Q-learning agent will inspect all possible actions available to move to the next state. Next, the Q-learning agent will carefully identify the best action
, that satisfies the maximum value for
to move to the new state. After moving to the new state, a reward value will be assigned to the agent as a measure of how successful this transition was in order to move to the new state [
44]. During the update phase, we compute
, which represents the difference between the new generated value function and the preceding value function of
. Then, update the resultant
value in the
Q-table according to the following formula.
Based on the updated Q-values in Q-table and the updated channel gain, a new achieved rate can be calculated and compared to the target rate for each user device in the cell. In the developed Q-learning algorithm, once the optimum rate or the terminal state is reached, the developed Q-matrix will be employed to compose the channel taps for each user device. The developed Q-learning procedure for channel approximation can be summarized as presented in Algorithm 1.
| Algorithm 1: Developed Q-learning Channel Prediction Structure. |
Inputs
- 2.
Number of Iterations and the size for the channel parameters for every user device. - 3.
Initial distance
of every user device from the BS. - 4.
Path loss parameter
. - 5.
Design random pilot symbols. - 6.
Initialize the random channel parameters for each user based on fading model, and . is the number of antennas at BS and is the number of devices in the cell. - 7.
Designate the power percentage for each user. - 8.
Determine system bandwidth , Total transmit power , and noise spectral density - 9.
Assign the desired channel parameters and the target rate
Procedure
- 10.
Based on the channel gain , total transmit power , and initial power factor for each user , signal to interference noise ratio , minimum required rate can be calculated for each device. - 11.
At each iteration, compare the initial generated rate with the target rate . - 12.
Update the values for the Q-table that represent the current state and action pair .
Q-algorithm
- 13.
identify discount factor , learning rate , the current state, and the terminal state. - 14.
Choose the next state at random and set it as the next new state. - 15.
Inspect all possible actions to move to the new state. - 16.
Select the best action
, which satisfies the maximum value for the Q-value function argmax to move to the new state. - 17
Identify the immediate Reward , based on the action implemented to move to the new state. - 18.
Based on the following: (1) maximum Q-value obtained in (16), (2) the corresponding reward , (3) the discount factor , then can be updated based on bellman’s equation
Outputs
- 19.
Based on the updated values in Q-table, the channel coefficients and channel gain can be updated and a new user rate can be calculated and compared to the target rate . - 20.
Compute the difference between the updated value function and the previous . - 21.
Based on value in the Q-table can be further updated according to - 22.
Check whether the terminal state has been reached or the episode has been completed. - 23.
Compose predicted channel taps
|
8. Simulation Environment
Characterization of the simulation parameters and settings is discussed in this section. The examined downlink MISO-NOMA system contains three distinct user devices and one BS in which the BS is supplied with two antennas and every user device in the cell is provided with a single antenna. In the examined NOMA structure, the modulated signals in downlink transmission are superimposed and transferred by BS to user devices via independent Rayleigh or Rician fading channels that are influenced by AWGN with noise power density assigned as
dBm/Hz and the path loss is set to 3.5. MATLAB software is utilized as a simulation tool to satisfy the following aims, (1) inspect, characterize, and evaluate the performance of the developed RL based Q-learning algorithm when implemented as a channel estimator in the considered MISO-NOMA system, (2) investigate the reliability of incorporating the developed Q-algorithm as channel estimator scheme with the optimized power scheme in the examined MISO-NOMA network, and performance metrics are considered to explore the impact of this integration. (3) optimized power allocation scheme and fixed power allocation scheme are both compared when the developed Q-learning scheme is utilized as a channel estimator in the cell. Monte-Carlo simulations are performed with
iterations, and at the outset of each iteration, pilot symbols are randomly generated and recognized at the BS and each device. The main simulation parameters are summarized in
Table 1.
The presented Simulation figures are generated based on the assumption that the channel coefficients are not available at each user device. Thus, in order to examine the effectuality of the developed RL based Q-learning procedure, and for the sake of comparison, four further simulation environments are established, (1) standard minimum mean square error (MMSE) based channel prediction scheme [
45]; (2) DL algorithm based on LSTM network for channel prediction applied in [
17], (3) RL based actor-critic procedure for channel prediction applied in [
15], (4) the fourth simulation environment is dependent on applying RL based State-Action-Reward-State-Action (SARSA) procedure (Ahsan et al., Mu et al. and Jiang et al.). Throughout the simulations, we point out to MMSE technique as conventional NOMA, to denote that user devices are applying the MMSE technique for predicting the channel state information (CSI) prior to reconstructing the desired signal.
In the simulation environment, NOMA parameters are generated on the basis of the LTE standard [
46,
47], and channel parameters are created to initially model the Rayleigh fading channels based on the ITU models. In our developed
Q-learning algorithm, at the end of the training episode, or if the terminal state is reached, the updated
values in the
Q-table will be employed as a practical channel coefficients for the user devices. Different power percentages are initially assigned for every user device according to channel gain and based on the existing distance from the BS. Power factors
,
, and
are specified for near, middle, and far users respectively. In a fixed power allocation setup, we designate
,
, and
. In the optimized power structure (OPS), power factors are allocate d for user devices in proportion to the analytical formula concluded previously for every device in
Section 4. In the simulation files, the transmission distance for each user device with respect to BS is assigned as follows:
,
m, and
m. Data and pilot symbols are modulated using Quadrature phase shift keying (QPSK) as the modulation format and the applied transferred power is mostly varying from 0 to 30 dBm.
9. Simulation Results and Discussion
Simulation outcomes that clarify the comparison between the developed RL based Q-learning algorithm and the conventional NOMA scheme that applies MMSE method to predict the channel coefficients for each device are shown in
Figure 4 in terms of BER versus power transmitted. The predicted channel parameters using both schemes are employed for the signal detection for each user device and the simulated results are shown where fixed power allocation (FPA) is considered. When the developed Q-algorithm is applied for channel estimation, each user device in the examined MISO-NOMA cell provides a noticeable improvement in lowering the BER compared to the MMSE procedure. At particular BER values such as 10
−2, the attained power saving by the Q-learning algorithm is within 2 dBm for far and middle user devices, while a power reduction within 1 dBm is recorded for the near user.
In terms of the outage probability against applied power,
Figure 5 illustrates the results for the inspected user devices in the MISO-NOMA cell when the developed Q-learning and standard MMSE are considered as a channel estimator schemes. Far, and middle devices simulation outcomes indicate about 2 dBm enhancement in saving power to realize 10
−2 outage probability when the developed Q-learning algorithm scenario is applied compared to the MMSE procedure. Similarly, a near user with the developed Q-learning algorithm displays a 1 dBm improvement in power saving with respect to the MMSE scheme. This enhancement in power saving verifies the advantage of the developed Q-model as a channel estimator compared to the MMSE technique.
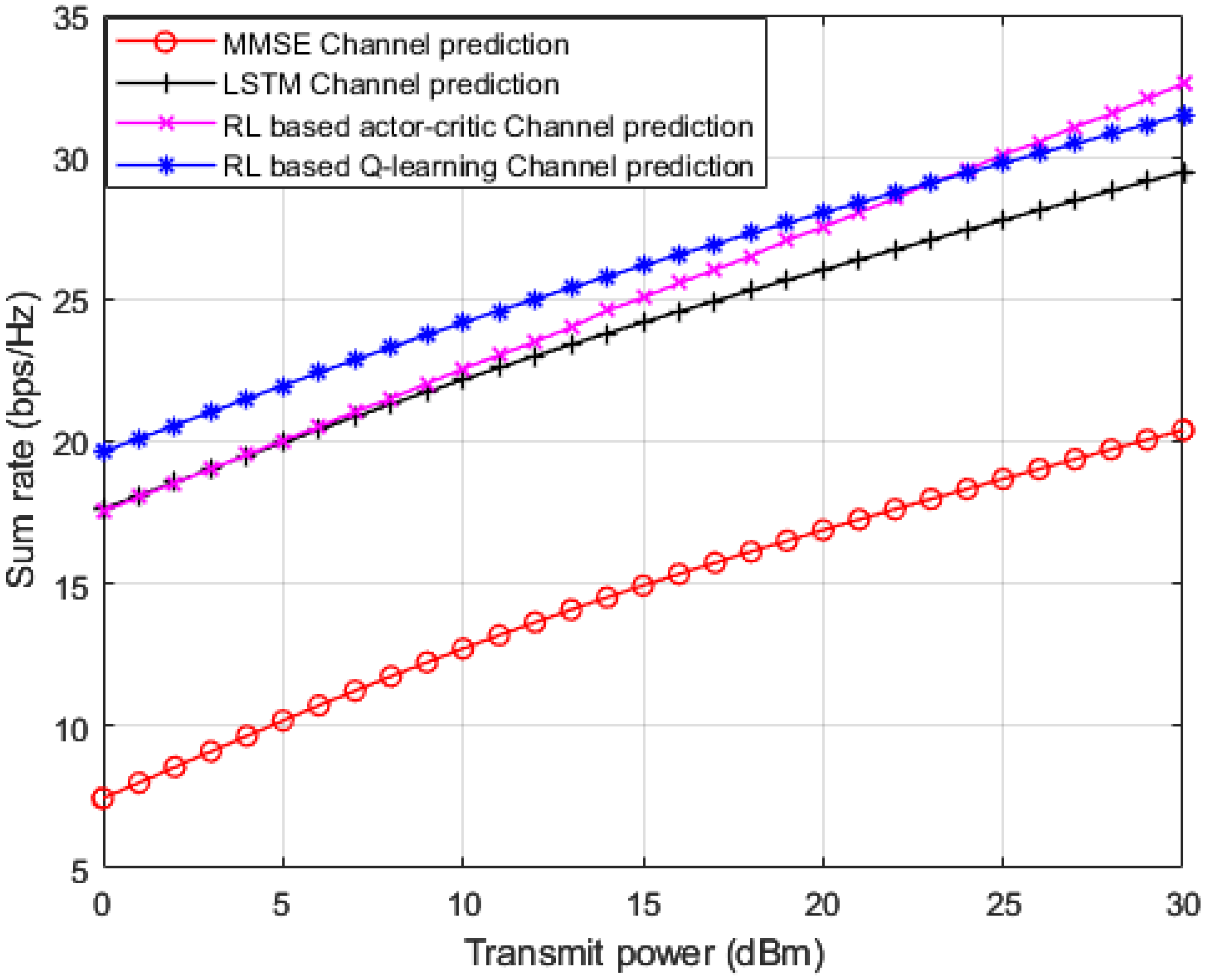
In
Figure 6, we implement three baselines for comparisons: (1) standard minimum mean square error (MMSE) based channel prediction scheme [
45]; (2) DL algorithm based on LSTM network for channel prediction applied in [
17]; and RL based actor-critic procedure for channel prediction applied in [
15]. This figure shows simulation results for the sum rate for all the user devices in the MISO-NOMA network versus applied power. Based on the simulation outcomes, it is evidently shown that the developed RL based Q-learning algorithm reveals superiority over standard MMSE procedure by 12 b/s/Hz approximately. Furthermore, the developed Q-learning scheme performs an enhancement over the DL based LSTM procedure presented in [
17] by 2 b/s/Hz. For the third benchmark in [
15], we generate the simulation environment according to the following: the actor and critic networks are both composed of two hidden layers with 400 and 300 nodes, respectively. The learning rate for actor and critic networks are 10
−4 and 10
−3 respectively. The discount factor γ is set to be 0.9 and has a buffer size of 10
5 [
15]. Our developed RL based Q-learning procedure, shows superiority over the RL based actor-critic procedure at low power levels while starting from 23 dBm the actor-critic procedure starts showing some enhancement in terms of sum rates compared to the Q-learning process. These findings can validate that the developed Q-learning algorithm can be a competitive scheme compared to other algorithms that mainly depend on hidden layers to predict channel parameters.
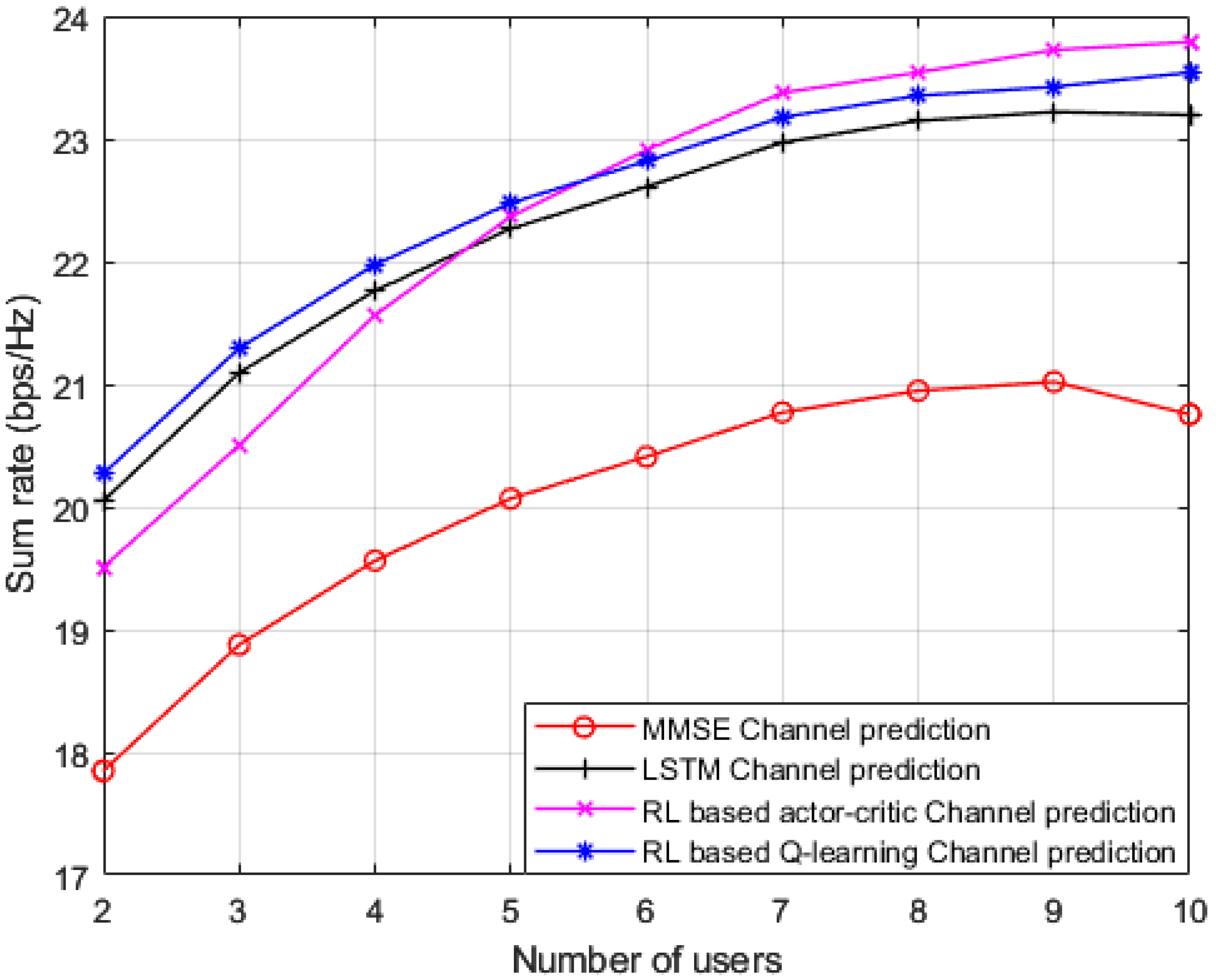
Simulation outcomes for the sum rate against different number of users in the applied MISO-NOMA cell are illustrated in
Figure 7, where the reference power is chosen to be 1 dBm. In addition to our proposed Q-learning algorithm, three distinct channel prediction methods are investigated as a benchmark comparison: (1) standard minimum mean square error (MMSE) based channel prediction scheme [
45]; (2) DL algorithm based on LSTM network for channel prediction applied in [
17]; and RL based actor-critic technique for channel estimation applied in [
15]. As revealed from the results, our developed RL based Q-learning algorithm can achieve a substantial greater sum rate with respect to standard MMSE procedure, by at least 2 b/s/Hz. It can be observed that as the number of user devices in the cell is increasing, the suggested RL based Q-learning algorithm still shows dominance in accomplishing higher rates with respect to MMSE and DL based LSTM channel estimation methods. Similar to
Figure 6, the RL actor-critic procedure applied in [
15] is created in our MISO-NOMA environment with the following parameters: the actor and critic networks are both composed of two hidden layers with 400 and 300 nodes, respectively. The learning rate for actor and critic networks are 10
−4 and 10
−3 respectively. The discount factor γ is set to be 0.9 and has a buffer size of 10
5 [
15]. As shown in the results, the developed Q-learning scheme is showing an advantage over the actor-critic scheme with up to 6 users in the cell. Then, the hidden layers feature in the actor-critic procedure starts producing some sort of improvement in the sum rates compared to the Q-learning algorithm while the number of user terminals in the cell is increasing. Overall, these outcomes reveal that dependability can be assured by the suggested Q-learning algorithm even when the user devices in the cell are increased. In addition, it is worth saying that while increasing the user devices in the system, the interference will also grow up, thus the sum rate could be degraded.
Figure 8 illustrates simulation outcomes for the achievable capacity for every device in the examined MISO-NOMA system when both the developed Q-learning algorithm and MMSE channel estimation procedures are implemented. The attained rate for near devices reveals substantial improvement by 10 b/s/Hz over far and middle users’ rates. The superiority of the near user in terms of the achievable rate is anticipated, due to the stable channel situation for the near user compared to other devices in the system. Additionally, the suggested Q-learning algorithm still can deliver few visible improvements compared to the MMSE technique for far and middle users’ environments, this slight improvement is associated with the interference and inadequate link conditions for far and middle devices.
In addition to the three baselines comparisons implemented in
Figure 6 and
Figure 7, we also create and implement RL based State-Action-Reward-State-Action (SARSA) algorithm [
48,
49,
50] in
Figure 9,
Figure 10 and
Figure 11 for the purpose of more investigations and benchmark comparisons. The features and parameters of the SARSA algorithm are adapted in order that the SARSA procedure can be used as a channel estimator and compare the results of SARSA algorithm with the results obtained based on our developed Q-learning algorithm.
The Q-learning algorithm and SARSA algorithm are two efficient RL algorithms, they are both table-based procedures with a Q-table to record equivalent Q-values of each state-action pair. However, when the size of state space increases, it will need a considerable amount of memory. Similar to the Q-learning algorithm, the SARSA algorithm also has exploration and exploitation processes, and it also needs a Q-table to record value corresponding to state and action . Differently, the running steps of the SARSA algorithm are as follows. First, according to the action selection scheme, the gent at the current state , will select the action . Then, the agent gets an immediate reward based on the corresponding value. Finally, will transfer to and the agent will choose the next action . Hence, the SARSA algorithm is a bit different from the Q-learning procedure, where the Q-value in the SARSA method is updated based on the action implemented by the agent at the state . While in the Q-learning algorithm, the action with the greatest Q-value in the next state is employed to update Q-table.
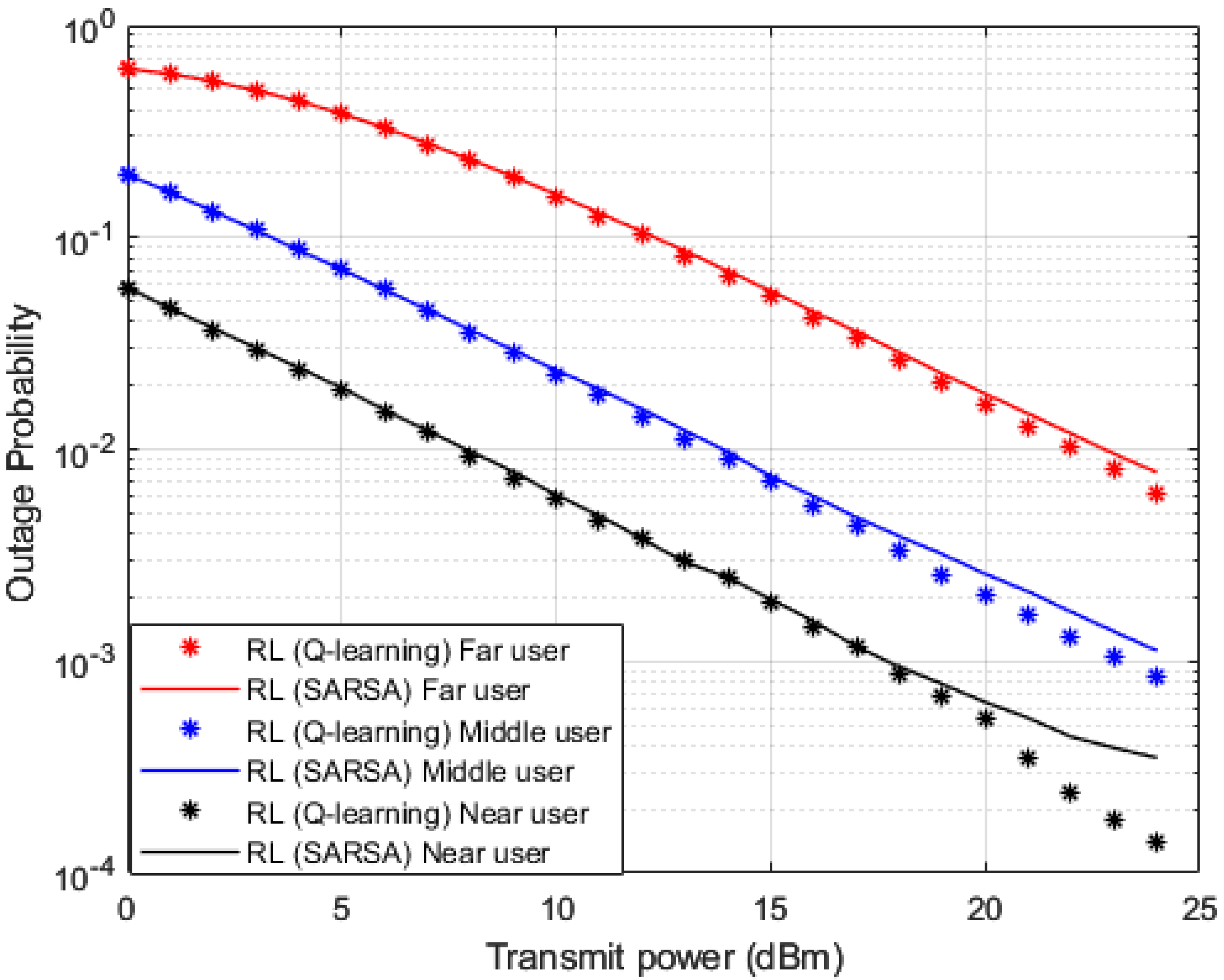
In
Figure 9 and
Figure 10, where BER and outage probability metrics are simulated against transmitted power, both our developed Q-learning and SARSA algorithms show comparable performance. However, at high power levels, the suggested Q-learning algorithm shows little improvement compared to the SARSA algorithm, which may be justified that the Q agent deciding the greedy action, which is the action that provides the maximum Q-value for the state. More investigations for the comparison between SARSA and the developed Q-learning algorithms are shown in
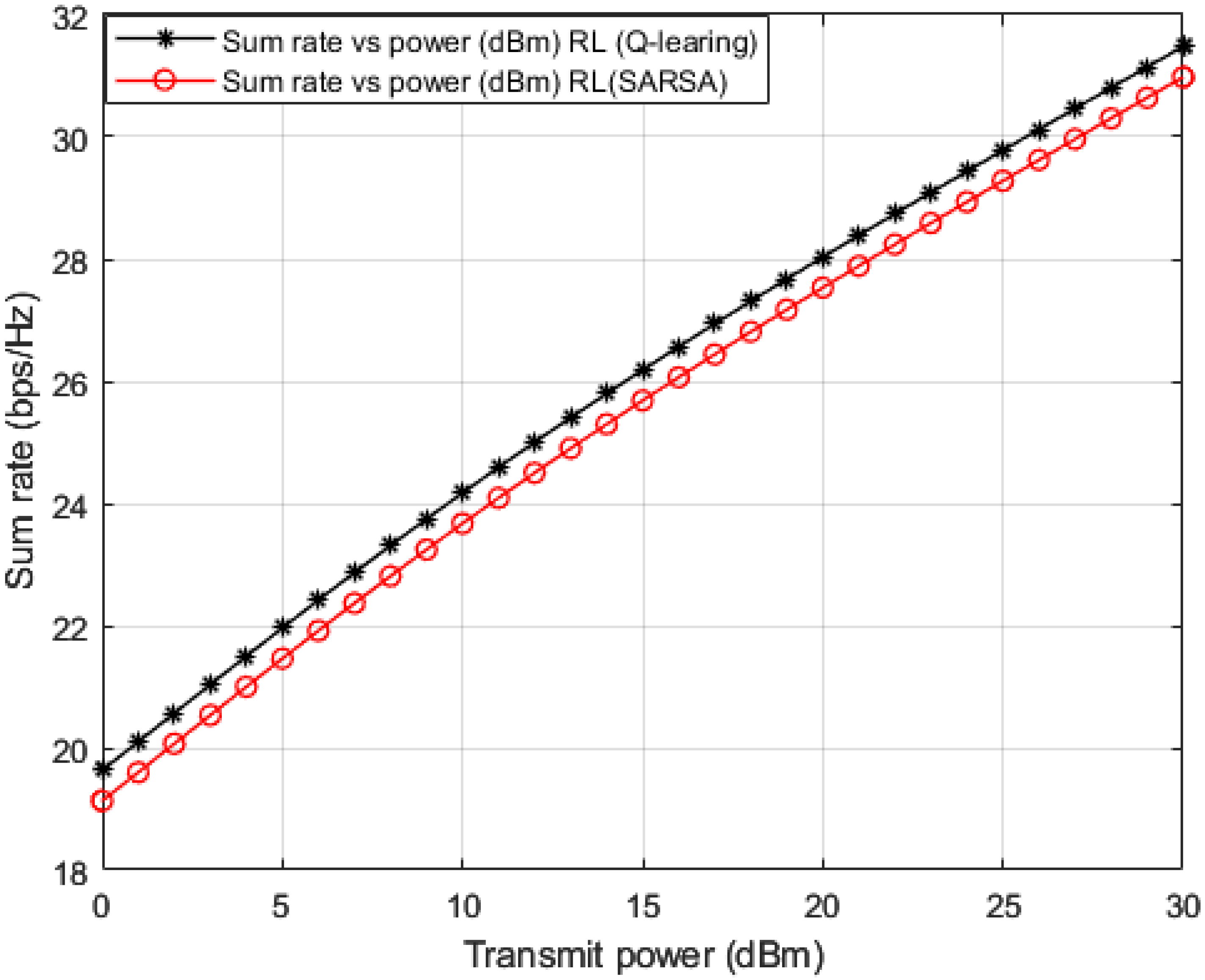
Figure 11. Sum rates versus applied power are simulated in
Figure 11, and it is noticed that the suggested Q-learning scheme provides an advantage over the SARSA algorithm, and a power saving is recorded by 1–2 dB approximately.
The proposed Q-learning method and traditional MMSE technique will be further examined when the Rician channel is applied for the path between BS and each user device. Rician channel is a stochastic model for wireless transmission where the signal reaches the receiver device via various scattered paths.
Figure 12, illustrate simulation outcomes for BER against power transmitted when the Rician fading channel is applied. In the Rician simulation environment, we assign parameter
K = 10, where
K is described as the fraction of the signal power of the line-of-sight path to the signal power of the remaining scattered components. In addition, maximum doppler shift = 100 and sample rate = 9600 Hz are used. Results for the Rician channel indicate that the Q-learning algorithm still can provide some sort of enhancement in decreasing the BER compared to the MMSE procedure. This slight improvement can be explained by the existence of a line of site component among BS and user terminal which can enhance the work of the MMSE procedure.
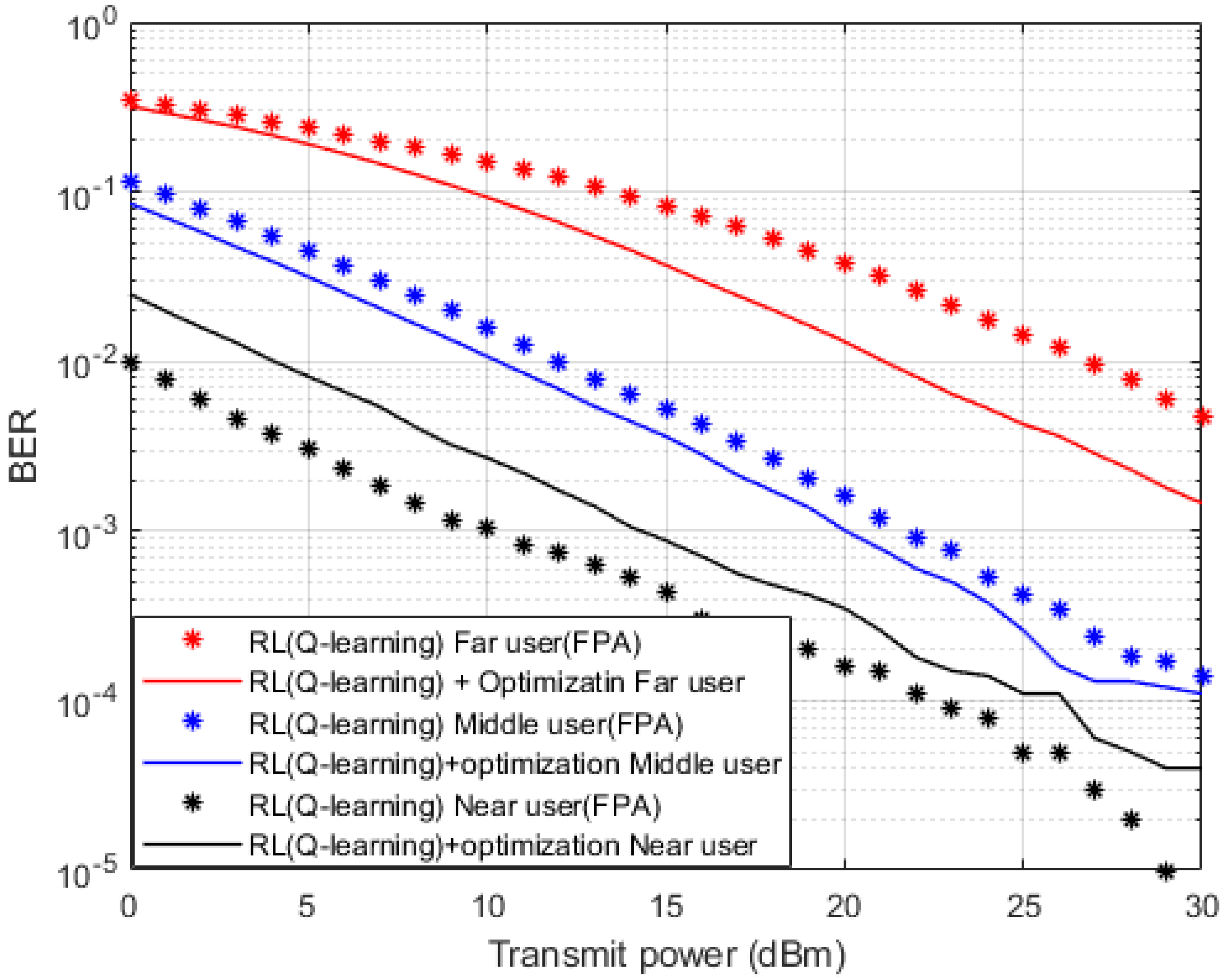
In
Figure 13, two separate simulation setups are accomplished here to produce these results. In the first setup, the Fixed Power Allocation (FPA) structure is assigned for every user terminal in the MISO-NOMA cell. The second setup depends on the Optimized Power Structure (OPS) applied in accordance with the analytical power scheme that previously concluded in
Section 4. FPA or OPS will be applied in conjunction with the suggested Q-learning algorithm as a channel estimator. Simulation outcomes in terms of BER indicate that far and middle users show the dominance of the OPS over the FPA. It can be noted that at specific BER values such as 10
−2, the achieved power saving by OPS policy is about 5 dBm for the far user, and 1–2 dBm approximately for the middle user. For near user results, the developed Q-learning algorithm jointly with the FPA scheme provide evident improvement in terms of BER over OPS, this could be clarified that for near device scenario, the stable channel condition provides more advantageous for the performance than the assigned power.
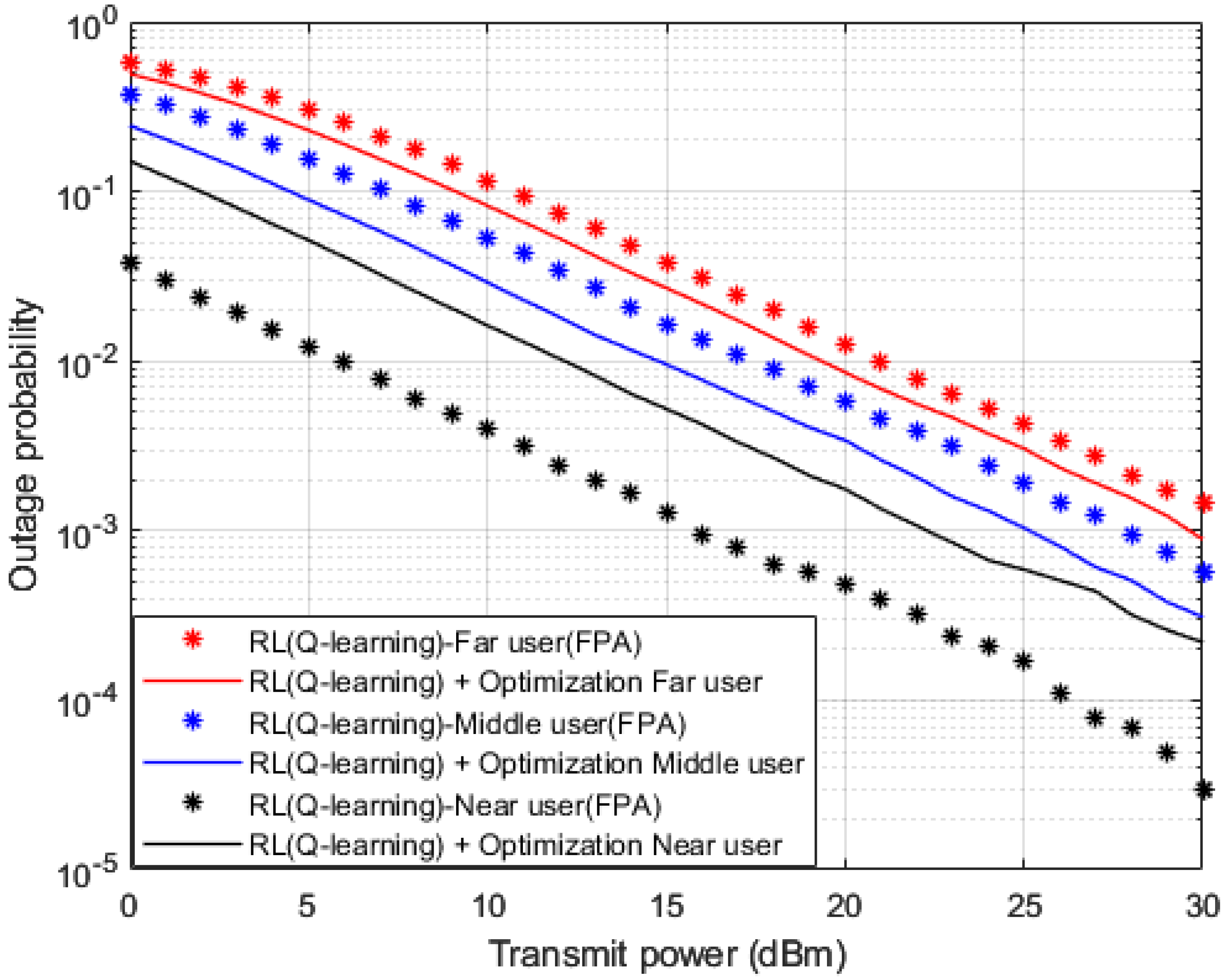
Outage probability results versus power are shown in
Figure 14, where OPS and FPA schemes are also implemented. Both arrangements of OPS and FPA are implemented in conjunction with the proposed Q-learning algorithm as a channel estimator in the MISO-NOMA cell. Both far user and middle user results reveal an improvement in outage probability where a power reduction can be observed within 1–2 dBm when OPS is applied compared to the FPA scheme. On the other hand, near user with a Q-learning algorithm and FPA scenario shows a considerable outage improvement compared to the OPS case. A power reduction within 5 dBm is achieved when the FPA scheme is applied. These findings verify the results obtained for BER in
Figure 13, which indicate that the FPA scheme is more adequate for user devices with high channel gains.
In
Figure 15, attainable rates for user devices are simulated against power transmitted when OPS and FPA schemes are applied in conjunction with the proposed Q-learning algorithm that is applied as a channel estimator. Results for far and middle devices point out that OPS provides 1 b/s/Hz improvement compared to the FPA scheme. This limited improvement might be clarified where the management of the power allocation for devices is not necessarily sufficient enough to alleviate the influence of interference particularly for far and middle devices that mainly experience unstable links environments. As expected, results for near user device reveal superiority in achieved rate with respect to middle and far devices with at least 10 b/s/Hz. Furthermore, the results for the near user with FPA indicate a noticeable improvement compared to OPS, which validates the results obtained in
Figure 13 and
Figure 14.
In the end, we can further provide the analysis of the computational complexity as follows: The complexity of the reinforcement learning algorithm mainly depends on the size of the state space and the size of the action space [
51]. According to [
51], we can approximate the computational complexity of the Q-learning algorithm as
per iteration, where
S is the number of states,
A is the number of actions, and
H is the number of steps per episode. According to the state space and action space defined in our simulation environment, the amount of work per iteration can be approximated as
[
51,
52], where
represents a number of antennas in BS,
represent a number of user devices in the cell, and
represents the size of channel coefficients. On the other hand, the computational complexity for the benchmark scheme implemented in [
15], is described as follows: the sizes of the input layer, the first hidden layer, the second hidden layer, and the output layer for each network implemented in [
15] is denoted as
,
,
, and
respectively. Thus, the total number of parameters in each network can be denoted as
, therefore, the complexity of this scheme regarding the channel estimation task can be approximated as
[
15], where
represents the number of user terminals and
represent the number of antennas at BS. According to [
53], the corresponding computational complexity for the traditional channel estimation method based MMSE can achieve a relatively low complexity,
[
45,
53], but, at the cost of performance degradation. Based on the aforementioned analysis, it can be shown that the complexity of the developed RL based Q-learning algorithm is competitive compared to other procedures.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}