
Strain FBG-Based Sensor for Detecting Fence Intruders Using Machine Learning and Adaptive Thresholding
 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Concept and Background
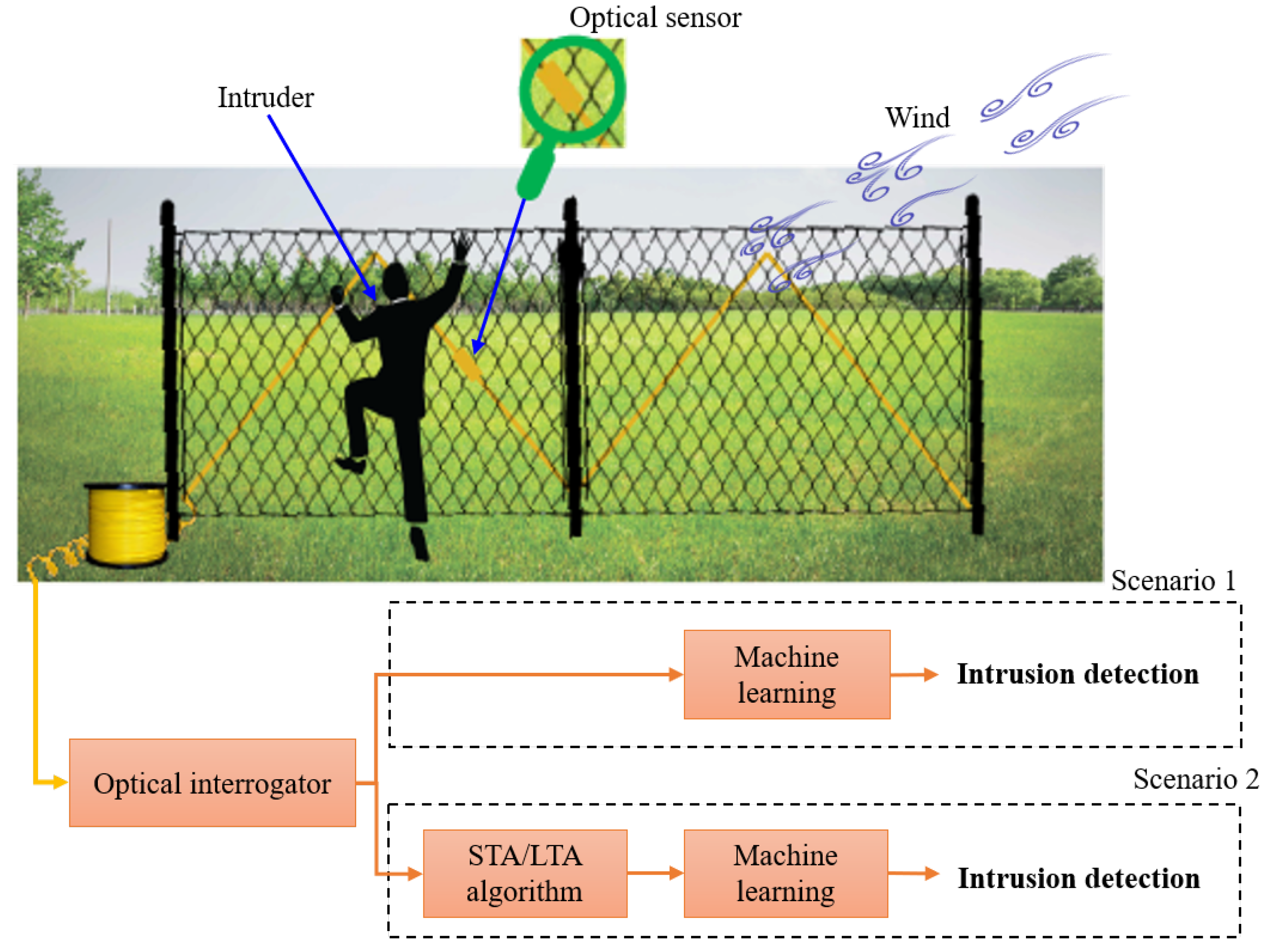
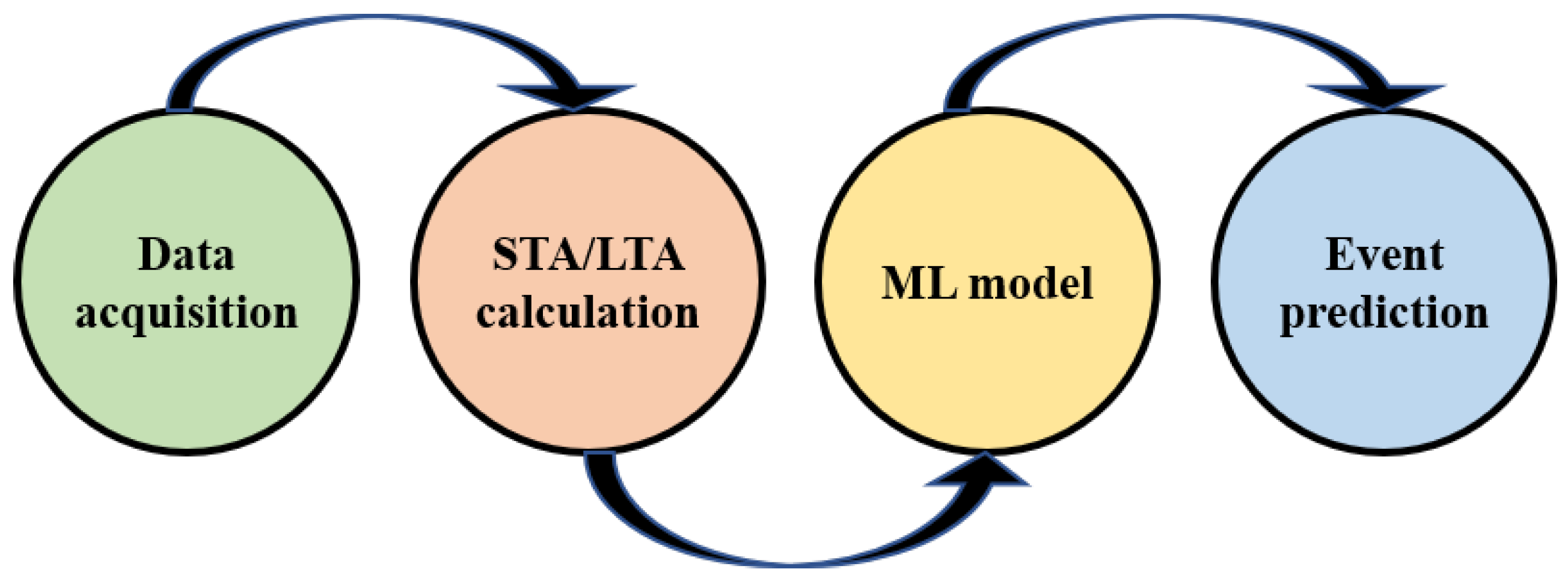
2.1. Concept
2.2. The Fiber Bragg Grating Sensor
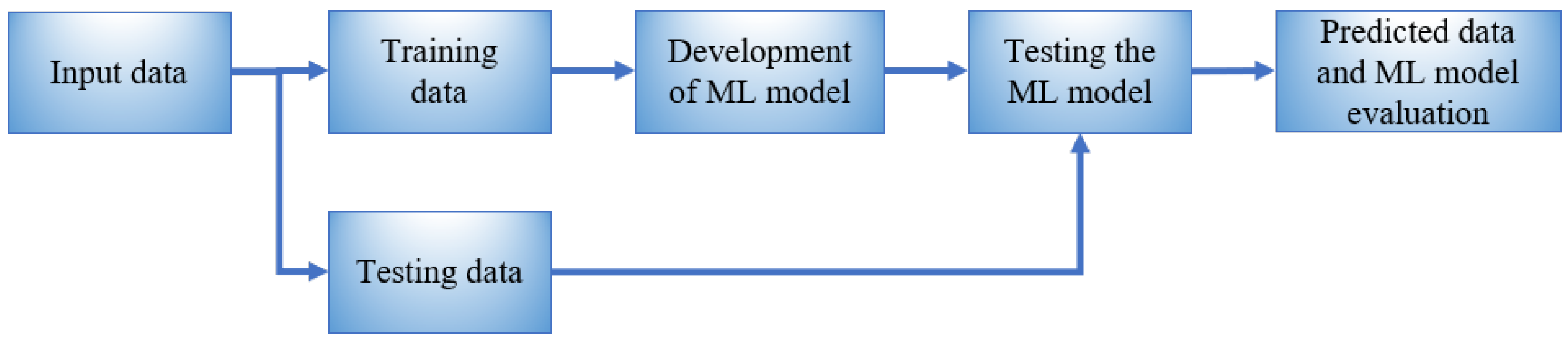
2.3. Machine Learning Algorithms
2.3.1. Linear Discriminant Analysis
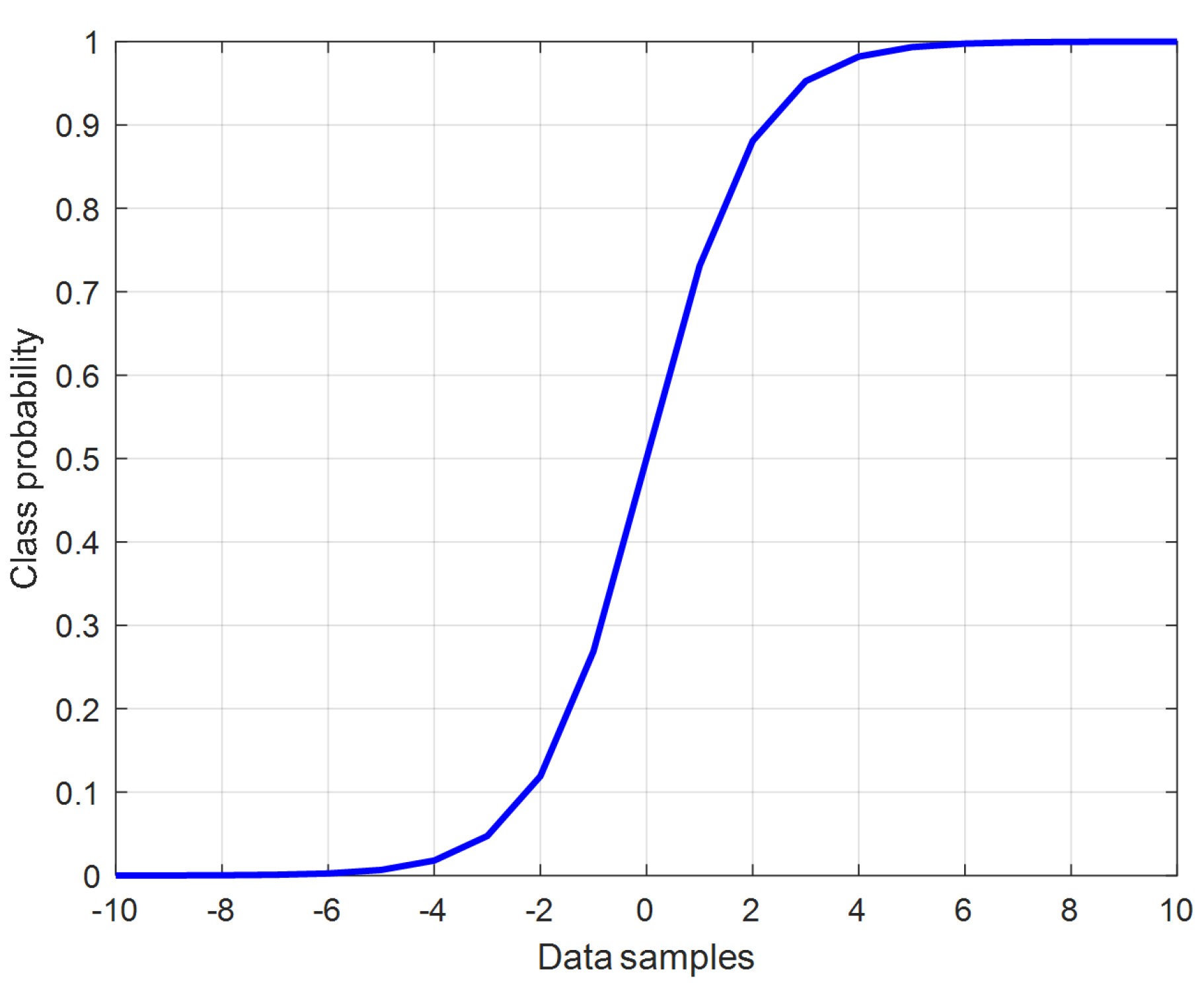
2.3.2. Logistic Regression
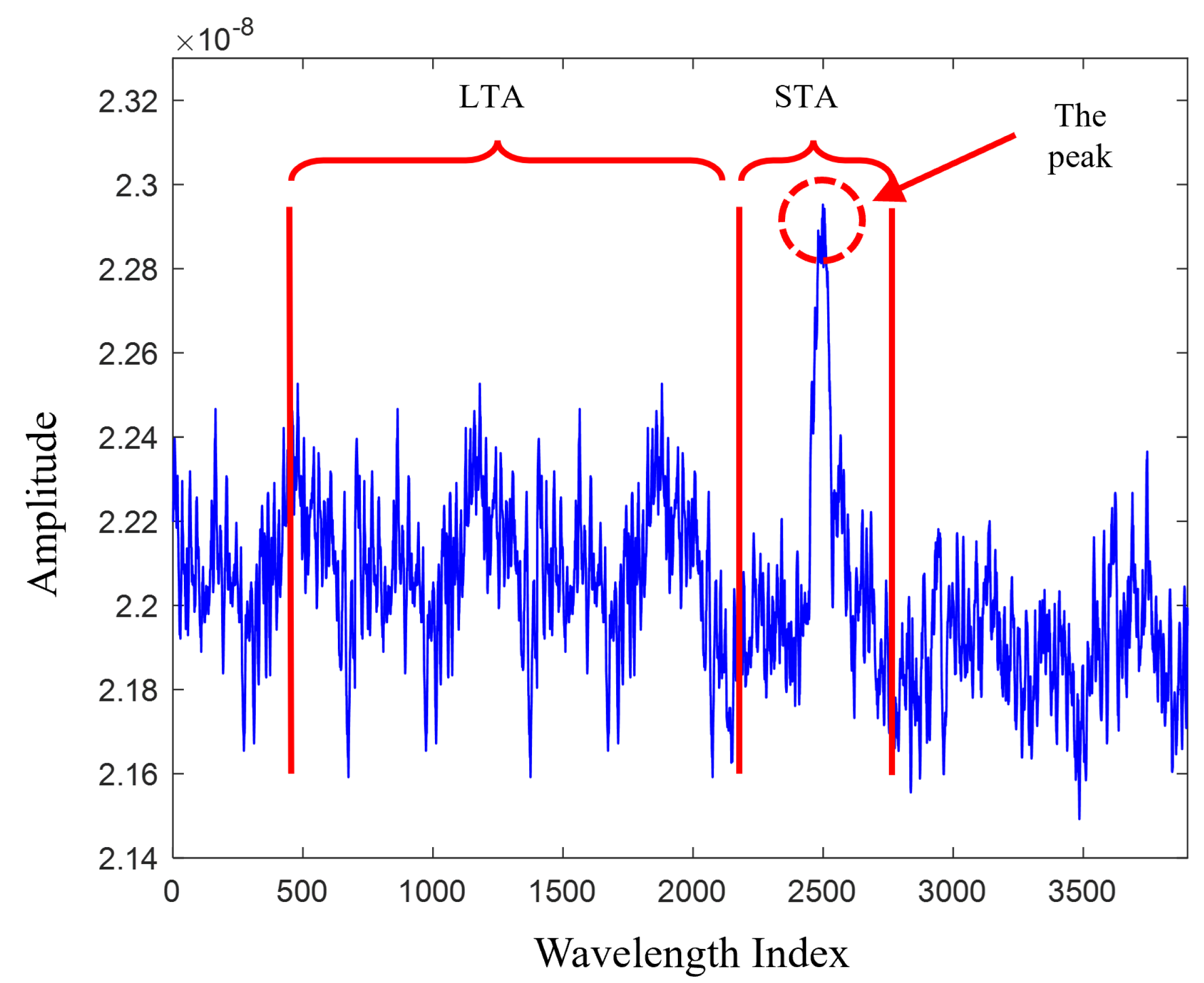
2.4. The Short-Term Average/Long-Term Average (STA/LTA) Algorithm
3. Experimental Setup and Data Acquisition
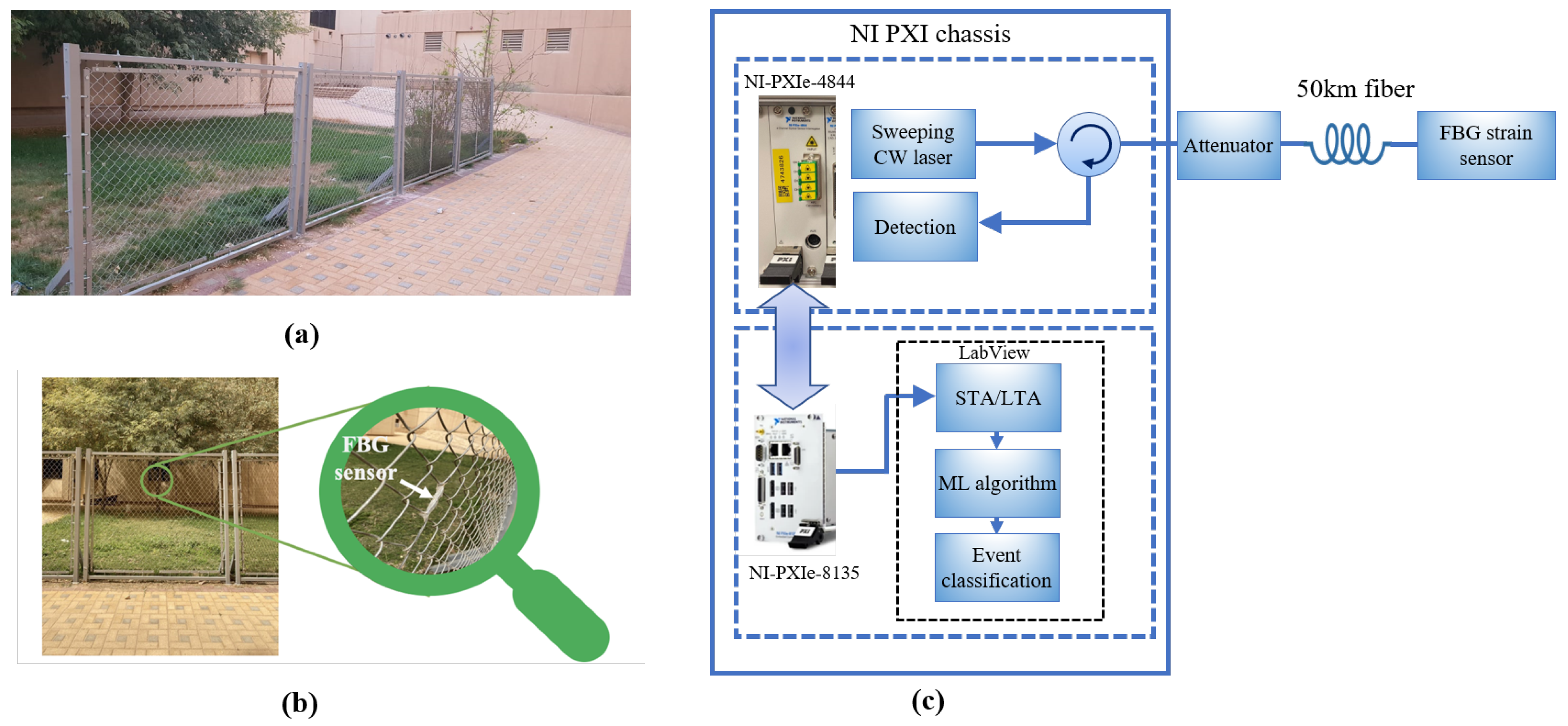
3.1. Experiment Setup
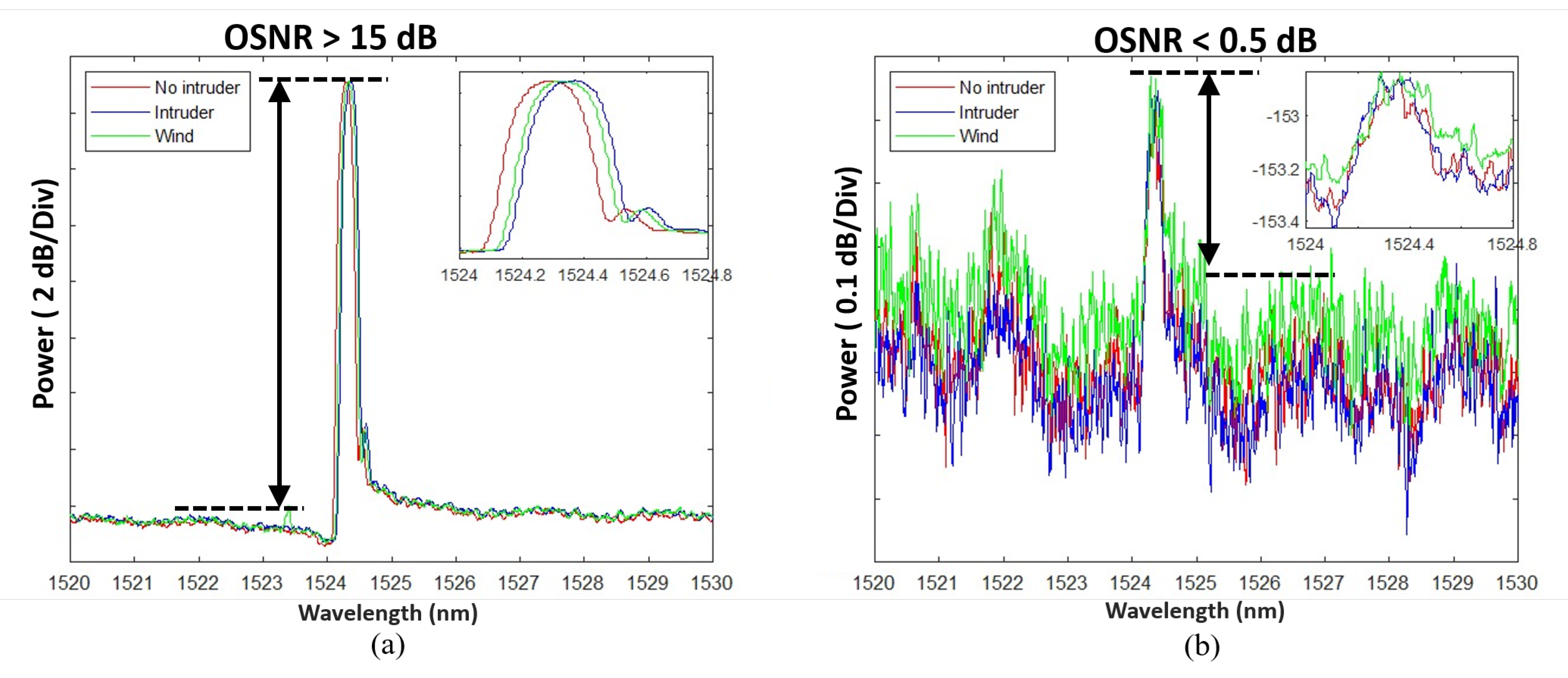
3.2. Data Acquisition
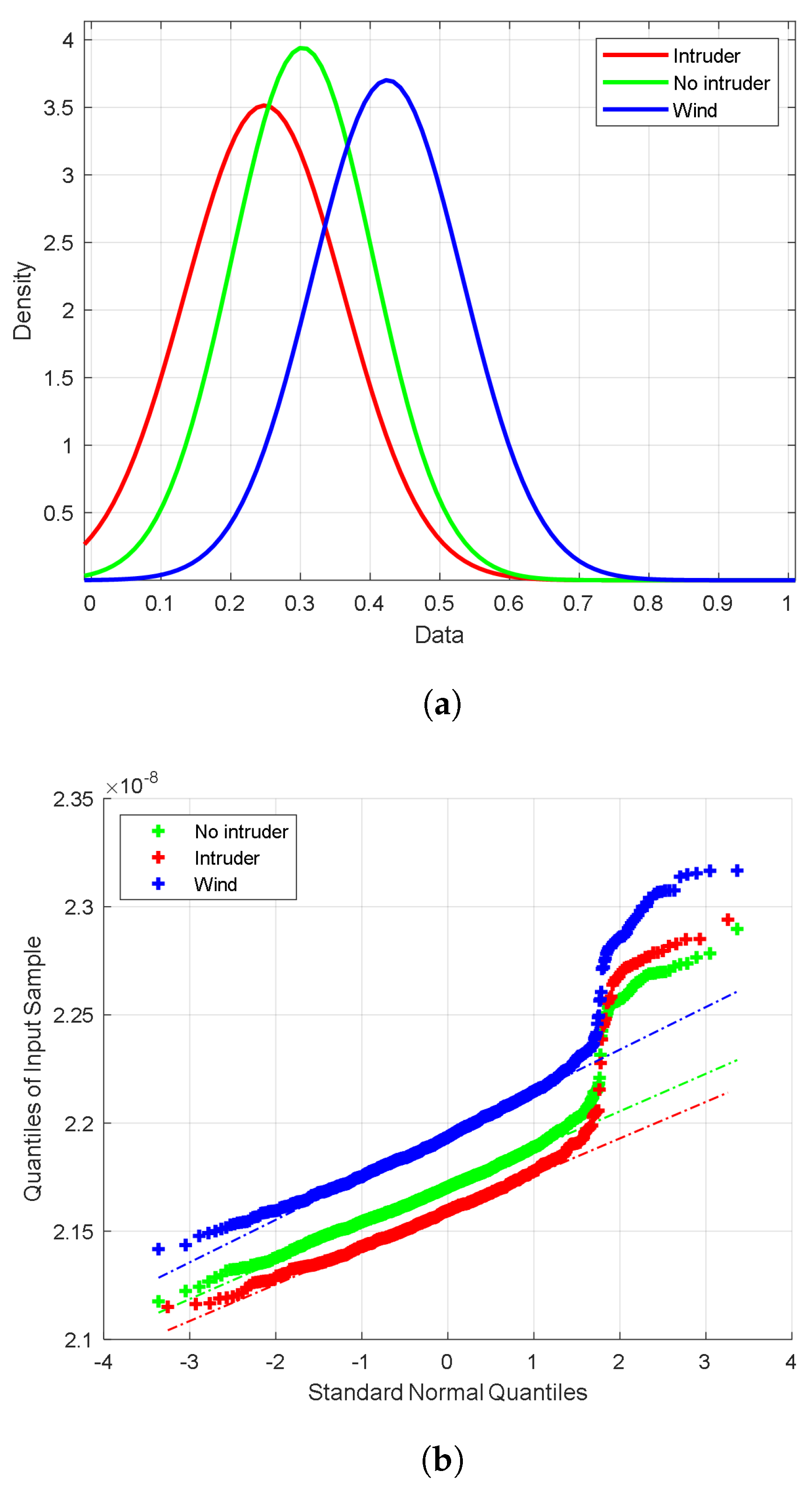
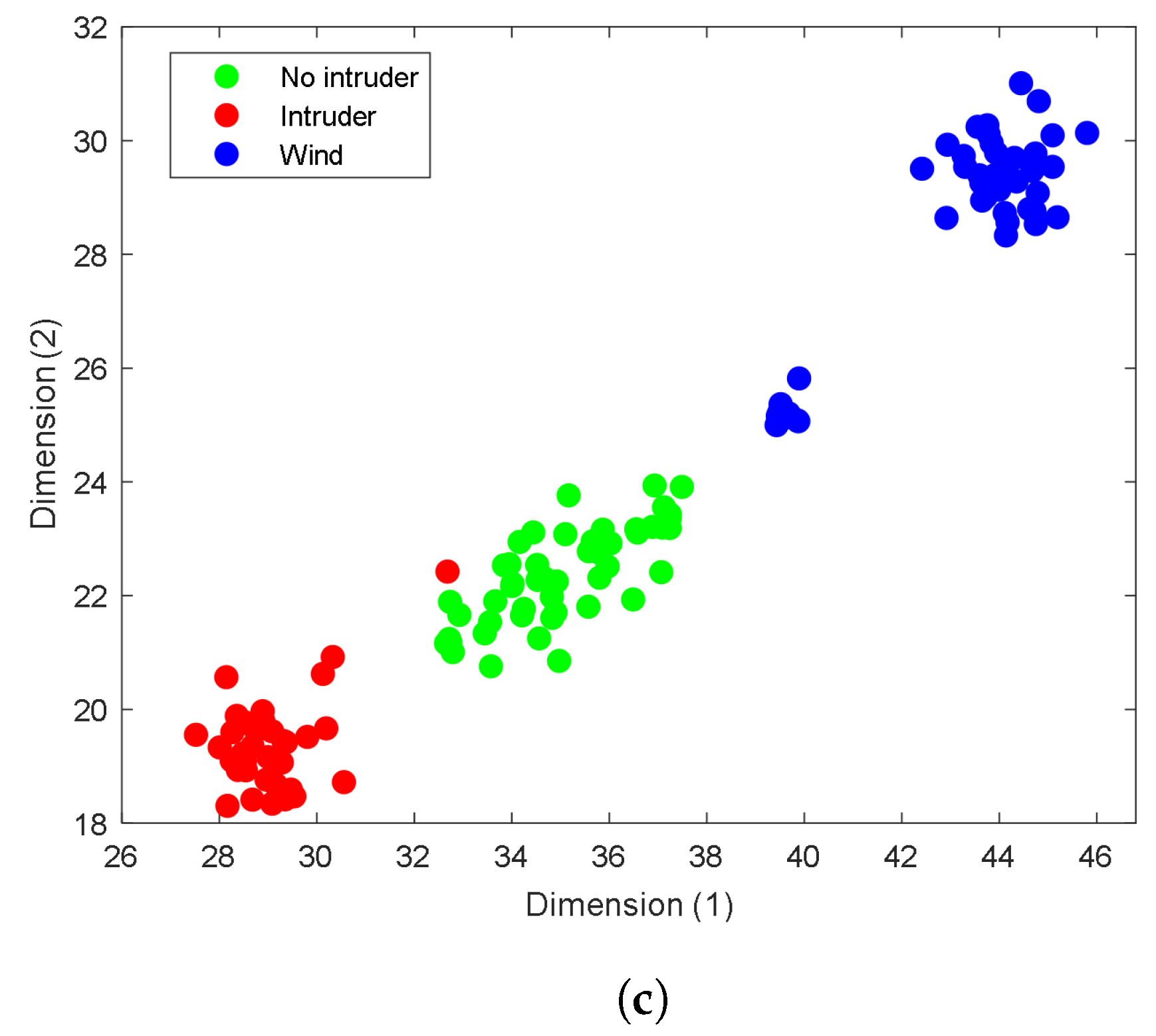
4. Data Separation Verification
5. Results and Discussions
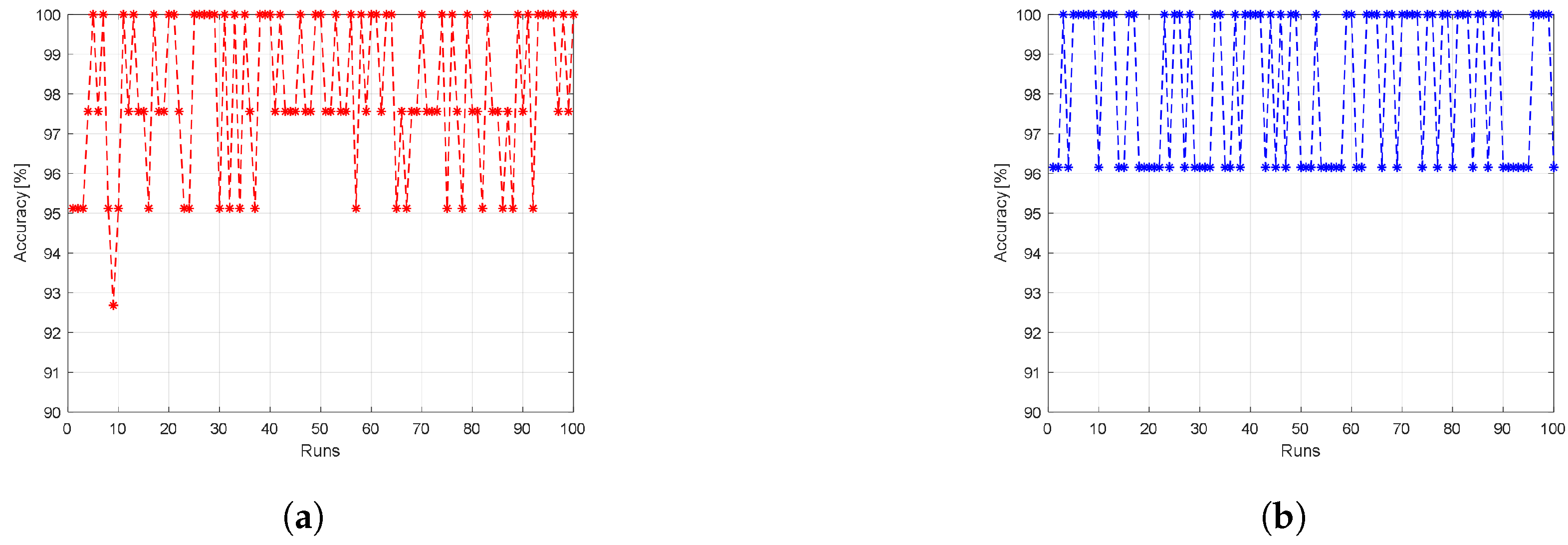
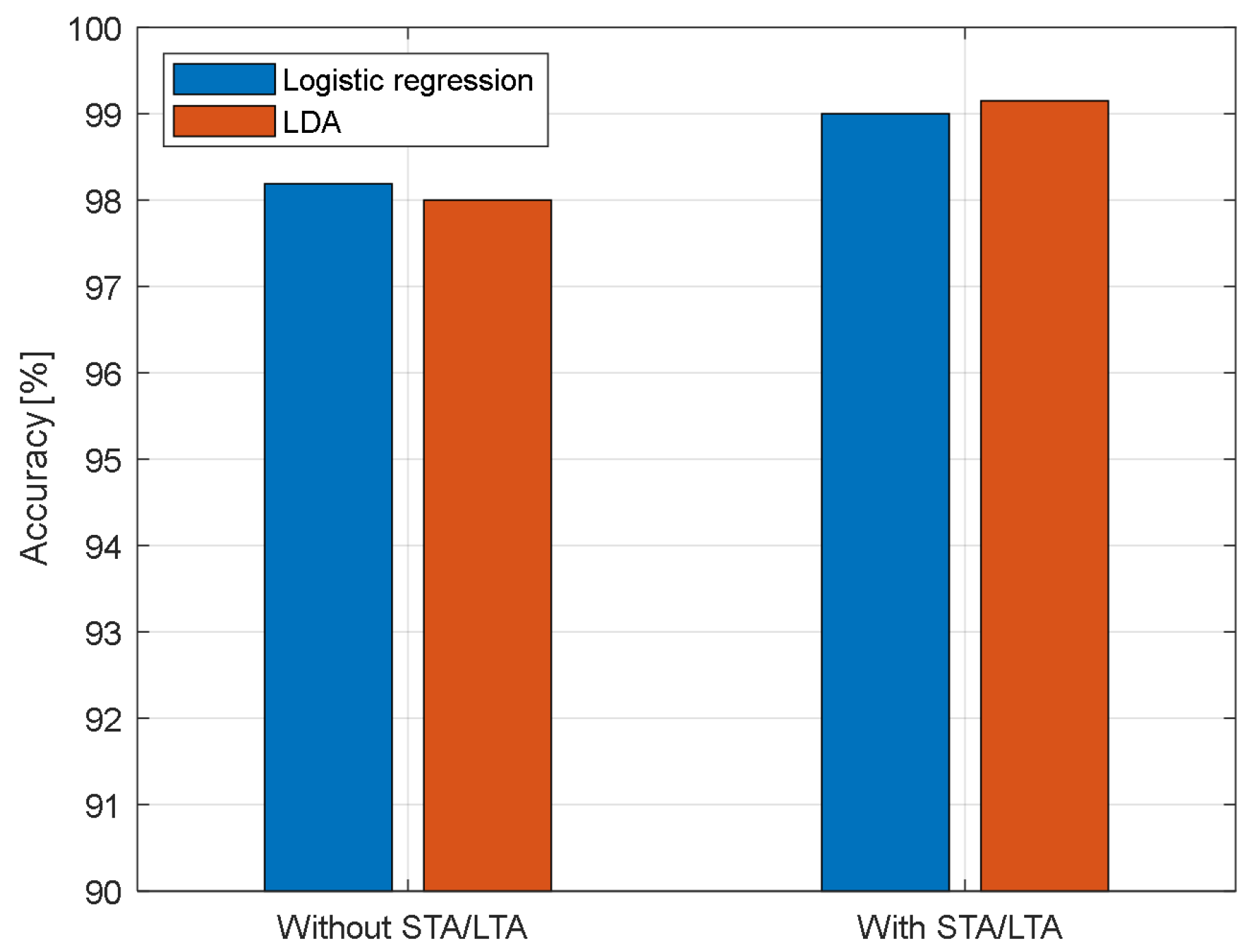
5.1. First Scenario: Directly Using the ML Models
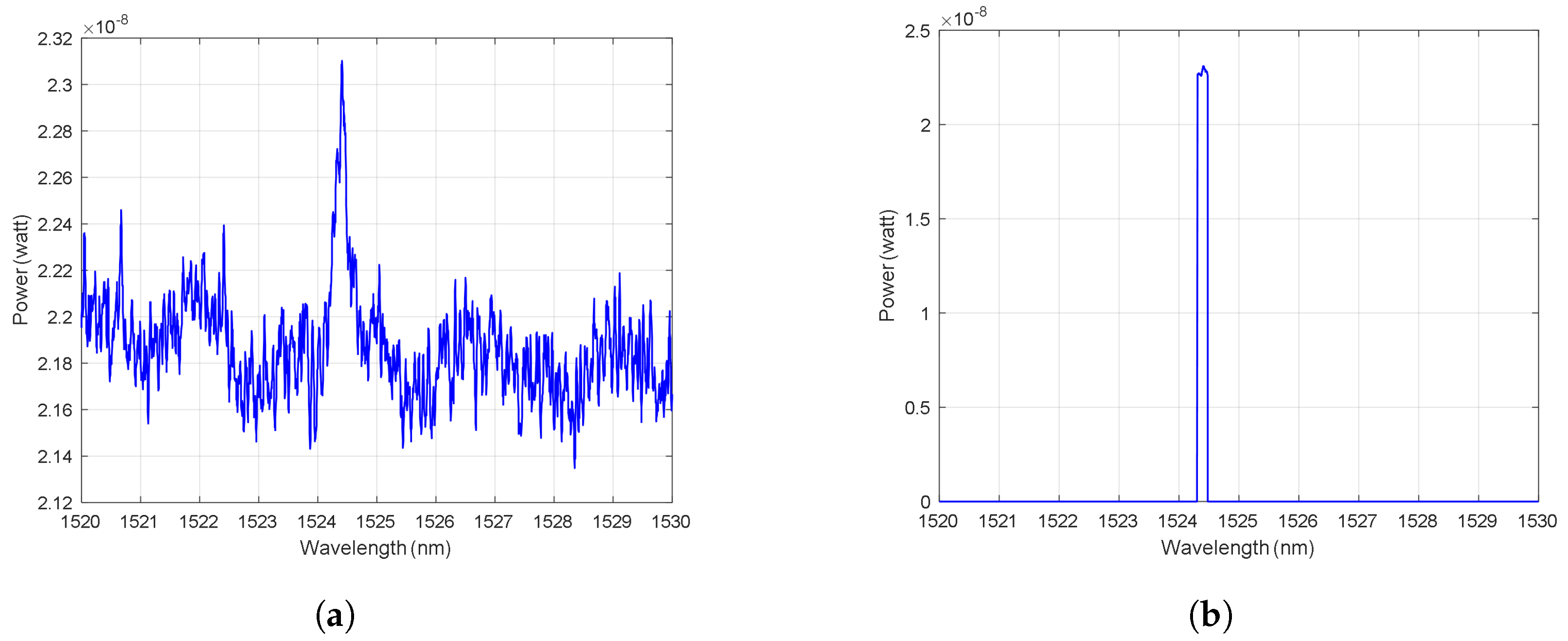
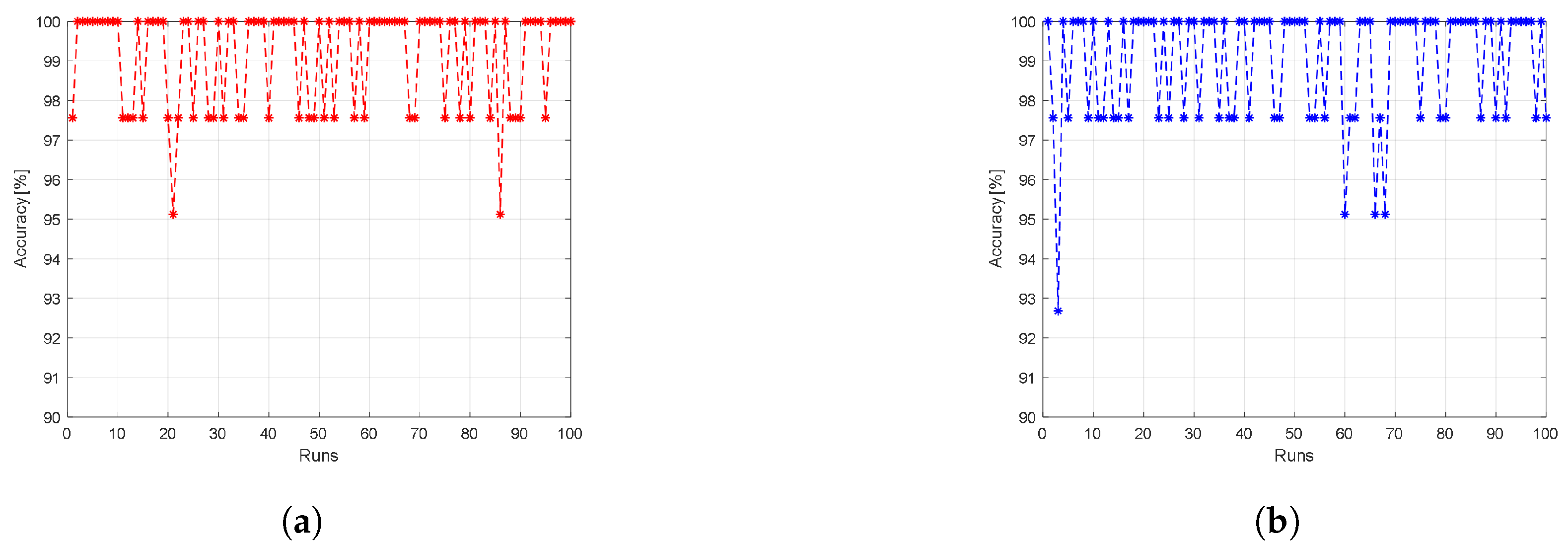
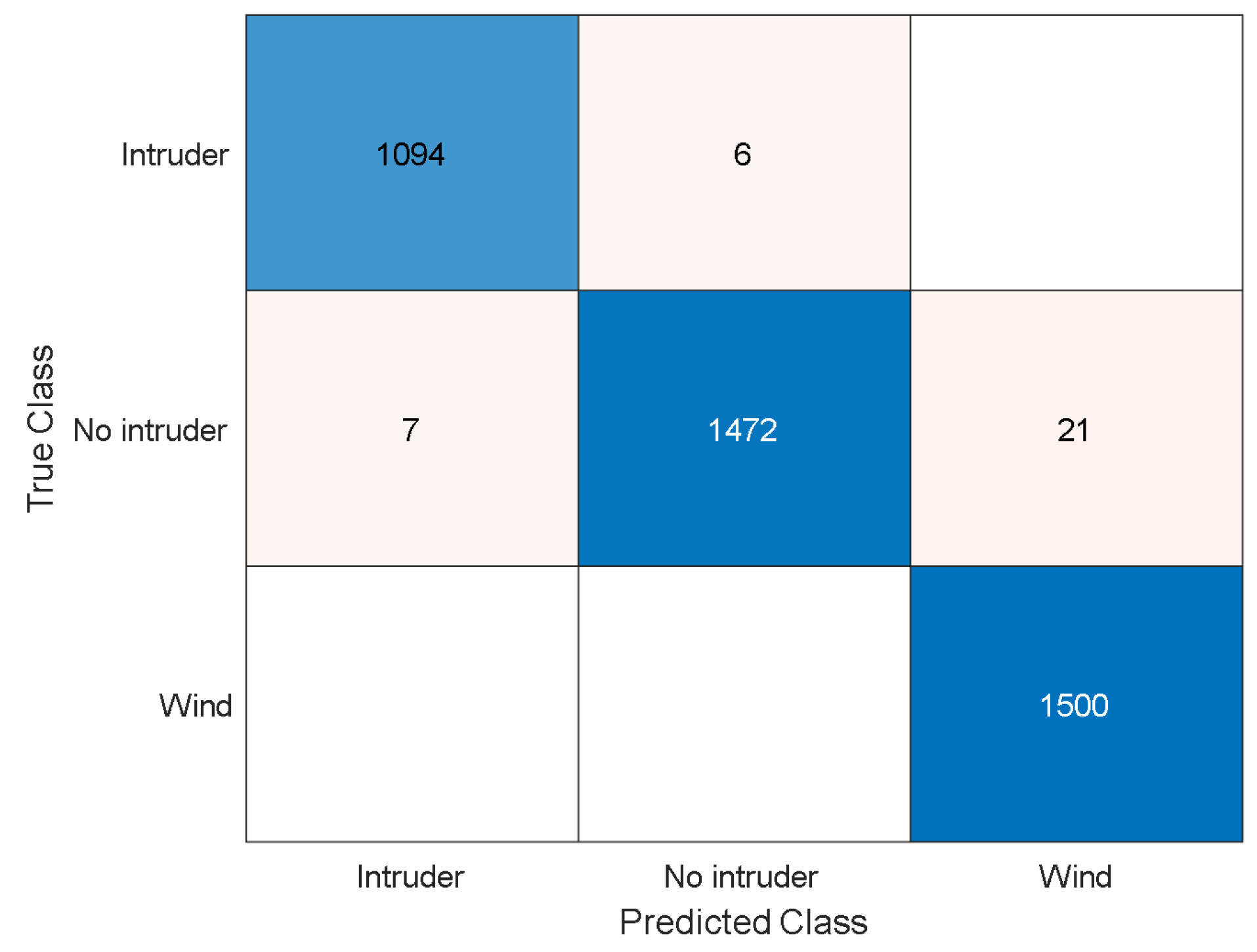
5.2. Second Scenario: Using the STA/LTA Algorithm as a Pre-Processing Function before the ML Models
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fang, Z.; Chin, K.; Qu, R.; Cai, H. Fundamentals of Optical Fiber Sensors; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 226. [Google Scholar]
- Pendão, C.; Silva, I. Optical Fiber Sensors and Sensing Networks: Overview of the Main Principles and Applications. Sensors 2022, 22, 7554. [Google Scholar] [CrossRef] [PubMed]
- Esmail, M.A.; Ali, J.; Almohimmah, E.; Almaiman, A.; Ragheb, A.M.; Alshebeili, S. Sagnac Loop Based Sensing System for Intrusion Localization Using Machine Learning. Photonics 2022, 9, 275. [Google Scholar] [CrossRef]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.T.; Buric, M.P.; Ohodnicki, P.R. Distributed optical fiber sensing: Review and perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Gui, X.; Li, Z.; Fu, X.; Guo, H.; Wang, Y.; Wang, C.; Wang, J.; Jiang, D. Distributed Optical Fiber Sensing and Applications Based on Large-scale Fiber Bragg Grating Array. J. Light. Technol. 2023, 1–14. [Google Scholar] [CrossRef]
- Kandamali, D.F.; Cao, X.; Tian, M.; Jin, Z.; Dong, H.; Yu, K. Machine learning methods for identification and classification ofevents in φ-OTDR systems: A review. Appl. Opt. 2022, 61, 2975–2997. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Tian, M.; Liu, T.; Jiang, J.; Ding, Z.; Chen, Q.; Ma, C.; He, C.; Hu, H.; Zhang, X. A High-Efficiency Multiple Events Discrimination Method in Optical Fiber Perimeter Security System. J. Light. Technol. 2015, 33, 4885–4890. [Google Scholar] [CrossRef]
- Lyu, C.; Jiang, J.; Huo, Z. Open-Set Events Identification Based on Deep Metric-Learning for DMZI Perimeter System. IEEE Sens. J. 2020, 20, 13620–13628. [Google Scholar] [CrossRef]
- Lyu, C.; Huo, Z.; Liu, Y.; Cheng, X.; Jiang, J.; Alimasi, A.; Yang, J.; Su, H. Robust Intrusion Events Recognition Methodology for Distributed Optical Fiber Sensing Perimeter Security System. IEEE Trans. Instrum. Meas. 2021, 70, 9505109. [Google Scholar] [CrossRef]
- Lyu, C.; Jiang, J.; Li, B.; Huo, Z.; Yang, J. Abnormal events detection based on RP and inception network using distributed optical fiber perimeter system. Opt. Lasers Eng. 2021, 137, 106377. [Google Scholar] [CrossRef]
- Mi, Q.; Yu, H.; Xiao, Q.; Wu, H. Intrusion behavior classification method applied in a perimeter security monitoring system. Opt. Express 2021, 29, 8592–8605. [Google Scholar] [CrossRef]
- Campanella, C.E.; Cuccovillo, A.; Campanella, C.; Yurt, A.; Passaro, V.M. Fibre Bragg grating based strain sensors: Review of technology and applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef] [PubMed]
- Leung, C.K.; Wan, K.T.; Inaudi, D.; Bao, X.; Habel, W.; Zhou, Z.; Ou, J.; Ghandehari, M.; Wu, H.C.; Imai, M. Optical fiber sensors for civil engineering applications. Mater. Struct. 2015, 48, 871–906. [Google Scholar] [CrossRef]
- Du, C.; Dutta, S.; Kurup, P.; Yu, T.; Wang, X. A review of railway infrastructure monitoring using fiber optic sensors. Sens. Actuators A Phys. 2020, 303, 111728. [Google Scholar] [CrossRef]
- Malakzadeh, A.; Mansoursamaei, M.; Pashaie, R. Simultaneous measurement of temperature and strain based on peak power changes and wavelength shift using only one uniform fiber bragg grating. Opt. Quantum Electron. 2021, 53, 208. [Google Scholar] [CrossRef]
- Gholampour, M.; Mansoursamaei, M.; Malakzadeh, A.; Mansoursamaei, F. Comparison of FWHM and peak power techniques for simultaneous measurement of strain and temperature in FBG sensors. Opt. Quantum Electron. 2023, 55, 117. [Google Scholar] [CrossRef]
- Xiong, L.; Guo, Y.; Zhu, J. Investigation of Gesture Recognition Based on Optical Fiber Bragg Grating Sensors. Measurement 2023, 209, 112498. [Google Scholar] [CrossRef]
- Rakshit, S.; Dhanalakshmi, S.; Chakravartula, V.; Nandini, P.; Kumar, R. Investigation of Peak Detection Algorithms for Fiber Bragg Grating Interrogation based Sensing Systems for Temperature, Depth and Salinity Measurements. J. Phys. Conf. Ser. 2021, 2007, 012057. [Google Scholar] [CrossRef]
- Tosi, D. Review and analysis of peak tracking techniques for fiber Bragg grating sensors. Sensors 2017, 17, 2368. [Google Scholar] [CrossRef]
- Negri, L.; Nied, A.; Kalinowski, H.; Paterno, A. Benchmark for peak detection algorithms in fiber Bragg grating interrogation and a new neural network for its performance improvement. Sensors 2011, 11, 3466–3482. [Google Scholar] [CrossRef]
- Barino, F.O.; dos Santos, A.B. LPG interrogator based on FBG array and artificial neural network. IEEE Sens. J. 2020, 20, 14187–14194. [Google Scholar] [CrossRef]
- Li, S.; Ren, S.; Chen, S.; Yu, B. Improvement of Fiber Bragg Grating Wavelength Demodulation System by Cascading Generative Adversarial Network and Dense Neural Network. Appl. Sci. 2022, 12, 9031. [Google Scholar] [CrossRef]
- Cao, Z.; Zhang, S.; Xia, T.; Liu, Z.; Li, Z. Spectral demodulation of fiber Bragg grating sensor based on deep convolutional neural networks. J. Light. Technol. 2022, 40, 4429–4435. [Google Scholar] [CrossRef]
- Shao, Y.; Chen, C.; Lu, Z.; Zheng, Y.; Zhang, Y. An intelligent leakage detection method for diaphragm wall joints based on fiber Bragg grating sensors and intelligent algorithms. Measurement 2022, 197, 111339. [Google Scholar] [CrossRef]
- Li, S.; Qiu, Y.; Jiang, J.; Wang, H.; Nan, Q.; Sun, L. Identification of Abnormal Vibration Signal of Subway Track Bed Based on Ultra-Weak FBG Sensing Array Combined with Unsupervised Learning Network. Symmetry 2022, 14, 1100. [Google Scholar] [CrossRef]
- Nascimento, K.P.; Frizera-Neto, A.; Marques, C.; Leal-Junior, A.G. Machine learning techniques for liquid level estimation using FBG temperature sensor array. Opt. Fiber Technol. 2021, 65, 102612. [Google Scholar] [CrossRef]
- Djurhuus, M.S.; Schmauss, B.; Clausen, A.T.; Zibar, D. Simultaneous temperature estimation of multiple gratings using a multi-layer neural network. IEEE Photonics Technol. Lett. 2020, 32, 1257–1260. [Google Scholar] [CrossRef]
- Allwood, G.; Wild, G.; Hinckley, S. Optical fiber sensors in physical intrusion detection systems: A review. IEEE Sens. J. 2016, 16, 5497–5509. [Google Scholar] [CrossRef]
- Lu, H.; Fang, N.; Wang, L. Signal identification based on modified filter bank feature and generalized regression neural network for optical fiber perimeter sensing. Opt. Fiber Technol. 2022, 72, 102993. [Google Scholar] [CrossRef]
- Wu, H.; Rao, Y.; Tang, C.; Wu, Y.; Gong, Y. A novel FBG-based security fence enabling to detect extremely weak intrusion signals from nonequivalent sensor nodes. Sens. Actuators A Phys. 2011, 167, 548–555. [Google Scholar] [CrossRef]
- Catalano, A.; Bruno, F.; Pisco, M.; Cutolo, A.; Cusano, A. Intrusion detection system for the protection of railway assets by using fiber Bragg grating sensors: A case study. In Proceedings of the 2014 Third Mediterranean Photonics Conference, Trani, Italy, 7–9 May 2014; pp. 1–3. [Google Scholar]
- Wu, H.; Qian, Y.; Zhang, W.; Li, H.; Xie, X. Intelligent detection and identification in fiber-optical perimeter intrusion monitoring system based on the FBG sensor network. Photonic Sens. 2015, 5, 365–375. [Google Scholar] [CrossRef]
- Ormiston, R.; Nguyen, T.; Coughlin, M.; Adhikari, R.X.; Katsavounidis, E. Noise reduction in gravitational-wave data via deep learning. Phys. Rev. Res. 2020, 2, 033066. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, J.; Liu, T. Wavelength detection in spectrally overlapped FBG sensor network using extreme learning machine. IEEE Photonics Technol. Lett. 2014, 26, 2031–2034. [Google Scholar] [CrossRef]
- Akram, J.; Peter, D.; Eaton, D. A k-mean characteristic function for optimizing short-and long-term-average-ratio-based detection of microseismic events. Geophysics 2019, 84, KS143–KS153. [Google Scholar] [CrossRef]
- Musumeci, F.; Rottondi, C.; Nag, A.; Macaluso, I.; Zibar, D.; Ruffini, M.; Tornatore, M. An overview on application of machine learning techniques in optical networks. IEEE Commun. Surv. Tutor. 2018, 21, 1383–1408. [Google Scholar] [CrossRef]
- Khan, F.N.; Fan, Q.; Lu, C.; Lau, A.P.T. An optical communication’s perspective on machine learning and its applications. J. Light. Technol. 2019, 37, 493–516. [Google Scholar] [CrossRef]
- Zibar, D.; Piels, M.; Jones, R.; Schäeffer, C.G. Machine learning techniques in optical communication. J. Light. Technol. 2015, 34, 1442–1452. [Google Scholar] [CrossRef]
- Carvalho, G.d.A.; Minnett, P.J.; Ebecken, N.F.F.; Landau, L. Classification of Oil Slicks and Look-Alike Slicks: A Linear Discriminant Analysis of Microwave, Infrared, and Optical Satellite Measurements. Remote Sens. 2020, 12, 2078. [Google Scholar] [CrossRef]
- Adebiyi, M.O.; Arowolo, M.O.; Mshelia, M.D.; Olugbara, O.O. A Linear Discriminant Analysis and Classification Model for Breast Cancer Diagnosis. Appl. Sci. 2022, 12, 11455. [Google Scholar] [CrossRef]
- Chatterjee, I.; Goršič, M.; Hossain, M.S.; Clapp, J.D.; Novak, V.D. Automated Classification of Dyadic Conversation Scenarios using Autonomic Nervous System Responses. IEEE Trans. Affect. Comput. 2023, 1–8. [Google Scholar] [CrossRef]
- Singh, G.; Pal, Y.; Dahiya, A.K. Classification of Power Quality Disturbances using Linear Discriminant Analysis. Appl. Soft Comput. 2023, 138, 110181. [Google Scholar] [CrossRef]
- Jeppesen, J.; Christensen, J.; Johansen, P.; Beniczky, S. Personalized seizure detection using logistic regression machine learning based on wearable ECG-monitoring device. Seizure 2023, 107, 155–161. [Google Scholar] [CrossRef] [PubMed]
- Fisher, R.A. The use of multiple measurements in taxonomic problems. Ann. Eugen. 1936, 7, 179–188. [Google Scholar] [CrossRef]
- Rajoub, B. Characterization of biomedical signals: Feature engineering and extraction. In Biomedical Signal Processing and Artificial Intelligence in Healthcare; Elsevier: Amsterdam, The Netherlands, 2020; pp. 29–50. [Google Scholar]
- Guo, Y.; Hastie, T.; Tibshirani, R. Regularized linear discriminant analysis and its application in microarrays. Biostatistics 2007, 8, 86–100. [Google Scholar] [CrossRef] [PubMed]
- Sayad, S. Linear Discriminant Analysis. Available online: http://www.saedsayad.com/lda.htm (accessed on 15 January 2023).
- Robles-Velasco, A.; Cortés, P.; Muñuzuri, J.; Onieva, L. Prediction of pipe failures in water supply networks using logistic regression and support vector classification. Reliab. Eng. Syst. Saf. 2020, 196, 106754. [Google Scholar] [CrossRef]
- Hidayat, T.H.J.; Ruldeviyani, Y.; Aditama, A.R.; Madya, G.R.; Nugraha, A.W.; Adisaputra, M.W. Sentiment analysis of twitter data related to Rinca Island development using Doc2Vec and SVM and logistic regression as classifier. Procedia Comput. Sci. 2022, 197, 660–667. [Google Scholar] [CrossRef]
- Mukhopadhyay, B.; Anchal, S.; Kar, S. Detection of an Intruder and Prediction of His State of Motion by Using Seismic Sensor. IEEE Sens. J. 2017, 18, 703–712. [Google Scholar] [CrossRef]
- Micron-Optics. Micron-Optics Optical Strain Gage—Model OS3100. Available online: http://micronoptics.ru/uploads/library/documents/Datasheets/Micron%20Optics%20-%20os3100.pdf (accessed on 1 March 2022).
- Vujnovic, S.; Marjanovic, A.; Djurovic, Z. Acoustic contamination detection using QQ-plot based decision scheme. Mech. Syst. Signal Process. 2019, 116, 1–11. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Ibrahim, A.B.; Seddiq, Y.M.; Meftah, A.H.; Alghamdi, M.; Selouani, S.A.; Qamhan, M.A.; Alotaibi, Y.A.; Alshebeili, S.A. Optimizing arabic speech distinctive phonetic features and phoneme recognition using genetic algorithm. IEEE Access 2020, 8, 200395–200411. [Google Scholar] [CrossRef]
- Saif, W.S.; Alshawi, T.; Esmail, M.A.; Ragheb, A.; Alshebeili, S. Separability of Histogram Based Features for Optical Performance Monitoring: An Investigation Using t-SNE Technique. IEEE Photonics J. 2019, 11, 1–12. [Google Scholar] [CrossRef]
- Kuang, Y.; Guo, Y.; Xiong, L.; Liu, W. Packaging and temperature compensation of fiber Bragg grating for strain sensing: A survey. Photonic Sens. 2018, 8, 320–331. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Label |
|---|---|
| No intruder | 0 |
| Intruder | 1 |
| Wind | 2 |
| Parameter | Value |
|---|---|
| Elongation % | 22 |
| Tensile Strength MPa | 370 |
| Yield Strength (0.2%) MPa | 300 |
| Shear Strength MPa | 230 |
| Hardness Brinell | 100 |
| Parameters | Specification |
|---|---|
| Output power (continuous wave) | 0.06 mW and 0.25 mW |
| Wavelength sweeping range | 1510 to 1590 nm |
| Wavelength accuracy | 1 pm |
| Dynamic range | 40 dB |
| Hardware resolution | 16 bit |
| Scan rate | 10 Hz |
| Parameters | Specification |
|---|---|
| Gage length | 22 mm |
| Peak wavelength | 1524.3 nm |
| Strain sensitivity | ∼1.4 pm/ |
| Peak reflectivity | >70% |
| FWHM | 0.25 nm |
| Operating temperature range | −40 to C |
| Strain limit |
| Parameters | Specification |
|---|---|
| Power | 600 W |
| No load speed | Max of 16,000/min |
| Air volume | 3.5 m/min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elleathy, A.; Alhumaidan, F.; Alqahtani, M.; Almaiman, A.S.; Ragheb, A.M.; Ibrahim, A.B.; Ali, J.; Esmail, M.A.; Alshebeili, S.A. Strain FBG-Based Sensor for Detecting Fence Intruders Using Machine Learning and Adaptive Thresholding. Sensors 2023, 23, 5015. https://doi.org/10.3390/s23115015
Elleathy A, Alhumaidan F, Alqahtani M, Almaiman AS, Ragheb AM, Ibrahim AB, Ali J, Esmail MA, Alshebeili SA. Strain FBG-Based Sensor for Detecting Fence Intruders Using Machine Learning and Adaptive Thresholding. Sensors. 2023; 23(11):5015. https://doi.org/10.3390/s23115015
Chicago/Turabian StyleElleathy, Ahmad, Faris Alhumaidan, Mohammed Alqahtani, Ahmed S. Almaiman, Amr M. Ragheb, Ahmed B. Ibrahim, Jameel Ali, Maged A. Esmail, and Saleh A. Alshebeili. 2023. "Strain FBG-Based Sensor for Detecting Fence Intruders Using Machine Learning and Adaptive Thresholding" Sensors 23, no. 11: 5015. https://doi.org/10.3390/s23115015