
An Energy-Efficient LoRa Multi-Hop Protocol through Preamble Sampling for Remote Sensing


Abstract
:1. Multi-Hop Wireless Networks
1.1. Introduction
1.2. Related Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Multiple-Access Technique | Focus | Experimentally Validated | Firmware | Validation by Simulations | Simulator | ||
|---|---|---|---|---|---|---|---|---|
| Open-Source | Platform | Open-Source | Lang. | |||||
| Asynchronous multi-hop Protocols | ||||||||
| This work | Prolonged preamble sampling | Energy efficiency | ✓ | ✓ | Arduino | ✓ | ✓ | Python |
| [7] | Delay tolerant and remote | Localization | ✓ | ✗ | Arduino | ✗ | - | - |
| [8] | ALOHA SF differentiation | Energy efficiency | ✓ | ✗ | LoRaMote | ✗ | - | - |
| [9] | ALOHA | Coverage | ✓ | ✗ | Mbed | ✗ | - | - |
| [10] | FDMA on long range (LoRa) channels | Coverage, throughput | ✓ | ✓ | Arduino | ✓ | ✓ | Python |
| [11] | TDOA, SF differentiation | Reliability | ✗ | - | - | ✓ | ✗ | OMNeT++ |
| [12] | ALOHA, SF differentiation | Reliability, latency | ✓ | ✗ | STM32 | ✓ | ✗ | ? |
| Time-synchronous multi-hop Protocols | ||||||||
| [13] | On-demand TDMA | Energy efficiency, latency | ✓ | ✗ | PIC | ✗ | - | - |
| [14] | TSCH | Coverage | ✓ | ✗ | LoRaMote | ✗ | - | - |
| [15] | Predictive wake-up | Coverage | ✗ | ✗ | STM32 | ✓ | - | - |
| [16] | Predictive wake-up | Coverage | ✓ | ✗ | STM32 | ✗ | - | - |
| [17] | Predictive wake-up | Energy efficiency, coverage | ✗ | - | - | ✓ | ✗ | OMNeT++ |
| [18] | TSCH | Latency | ✓ | ✗ | Mbed | ✗ | - | - |
| [19] | TDMA | Energy efficiency | ✓ | ✗ | Zolertia | ✗ | - | - |
| [20,21] | 2-hop slot scheduling TDMA | Coverage, reliability | ✓ | ✗ | STM32 | ✓ | ✗ | ? |
1.2.1. Synchronous versus Asynchronous Networks
1.2.2. Asynchronous Network Protocols
1.3. Requirements of the Intended Applications
- (1)
- Sensor measurement data are limited to at most 12 B. While this payload may seem small, this is plenty for the aforementioned use cases. In environmental use cases, for example, this could constitute the following payload: 4 B temperature value, 2 B humidity value, 4 B specific gas sensing values for estimating the considered air quality. Together, they would fill only 10 B of the payload.Keeping the data format for sensor measurements short is particularly important to allow for efficient data aggregation. When individual sensor measurement data are kept small, several readings can be aggregated by a ‘hopping’ node into a single message, before being forwarded.
- (2)
- Infrequent sensor sampling. In aforementioned IoT applications, sensor readings only need to take place sporadically. For example, environmental sensors typically sense slow-changing quantities, and thus only need to send sensor value readings infrequently (typically at most every 30 min).
- (3)
- High latency is acceptable. In logging applications, the data being collected are typically used for long-term monitoring or historical analysis. The data can be used to understand trends or detect patterns over time. In other applications, such as those in smart farming, high latency may be acceptable due to the nature of the measured variables. Smart farming systems are designed to monitor slow-changing environmental parameters, such as temperature, humidity, soil moisture, and light levels. These variables are typically measured over longer periods of time and are not as time-sensitive as other types of data. Action may only need to be taken within a few days based on the collected data.
- (4)
- All data are sent to a central node: the gateway. The gateway acts as data sink. Moreover, the network is dense enough so that each node is able to reach the gateway.
1.4. Contributions and Manuscript Outline
2. Multi-Hop Low-Power Network Protocol
2.1. Prolonged Preamble Sampling
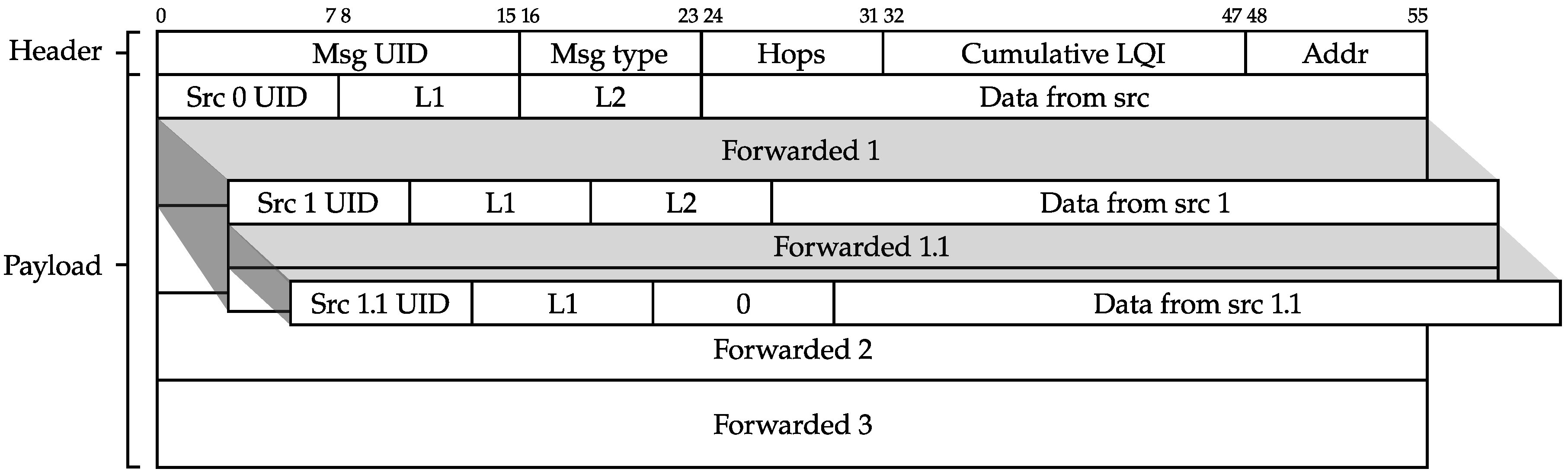
2.2. Frame Structure
- Msg UID: The first 16 bits are a randomly generated message identifier. This is used by the nodes to detect duplicate messages.
- Msg type: This byte specifies the type of the message. Currently, three types are supported: (1) ROUTE_DISCOVERY (2) ROUTED_DATA, en (3) DATA_BROADCAST. A detailed description of these different message types will be given further in the text.
- Hops: The number of hops a message has taken to arrive at a certain node. This field is automatically updated by the nodes when forwarding a message and plays an important role in the route establishment phase.
- Cumulative LQI: A 16-bit number giving an indication on the quality (hence, link quality indicator (LQI)) and reliability of a certain route in the network (see Section 2.3). In the current implementation, a lower number indicates better quality. When a node forwards a packet it increases the cumulative LQI field with the LQI of the previous hop.
- Addr: an address field used both in routing and route establishment. For routed data packets, this field contains the destination address. For route discovery packets, this field contains the source address of the transmitting (forwarding) node.
- Src UID: an 8 bit (or 16 bit, when 16-bit addressing is used in the network) unique identifier of the sending node.
- L1: length of the sensor data generated by this node.
- L2: length of the data that are generated by other nodes, but are forwarded by this node.
- Data from src: data that are generated by the node considered itself; the length of these data is indicated in field L1.
- Forwarded data: incoming data that need to be forwarded to other nodes, constituting in a single “hop”. The total length of the forwarded data is recorded in field L2. The forwarded data field will consist of a nested structure of several payload blocks, after several hops. Each payload block is kept distinguishable by a payload header, which incorporates the appropriate lengths.
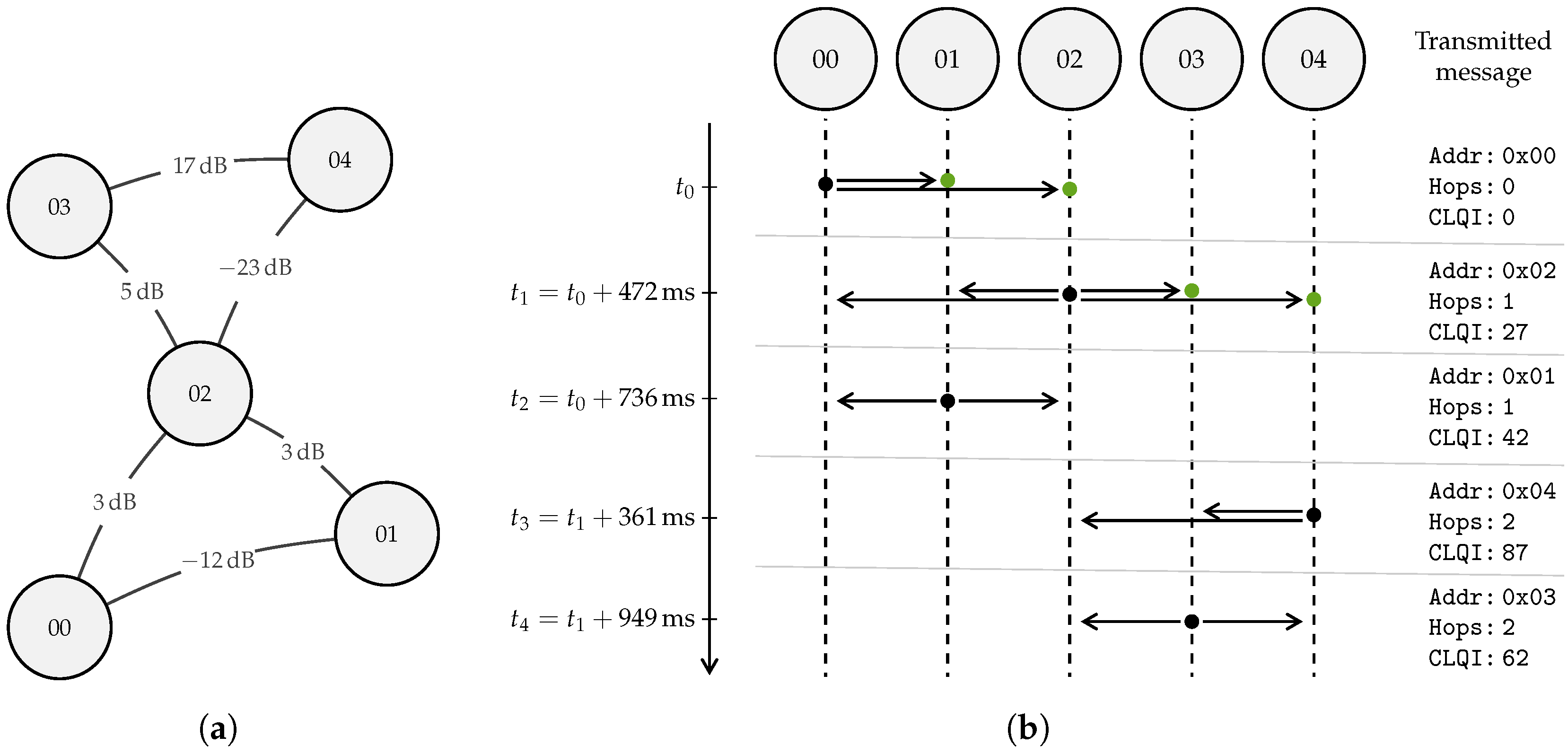
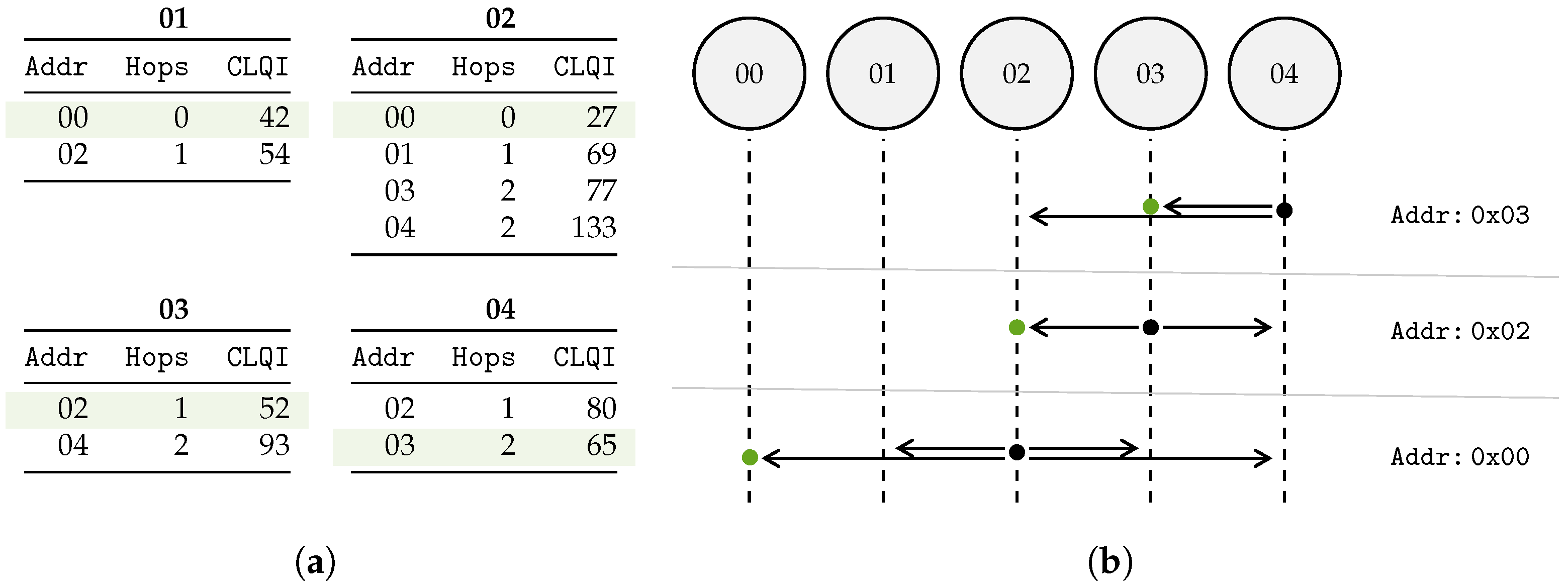
2.3. Route Establishment
2.4. Message Routing
2.5. Aggregation to Improve Energy per Byte
3. Open-Source IoT Platform Implementation
4. Multi-Hop Network Simulator
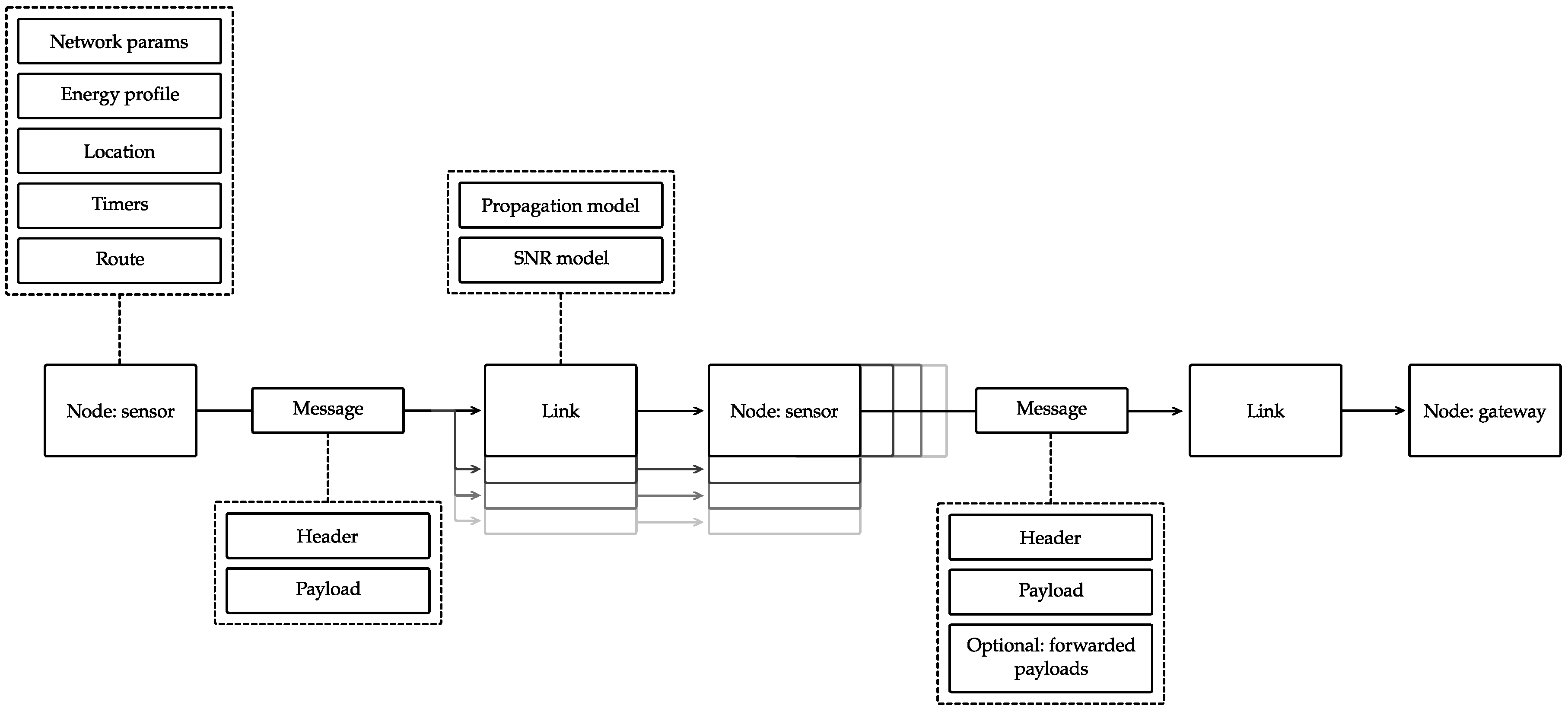
4.1. Nodes
- 1.
- Network-related parameters. The specifications of the network behavior are collected in a single class. These include both long range (LoRa) parameters (e.g., spreading factor (SF), sensitivity) and multi-hop protocol parameters (e.g., preamble size, route buffer size). The resulting changes in network behavior can be simulated by iterating through a range of network property values
- 2.
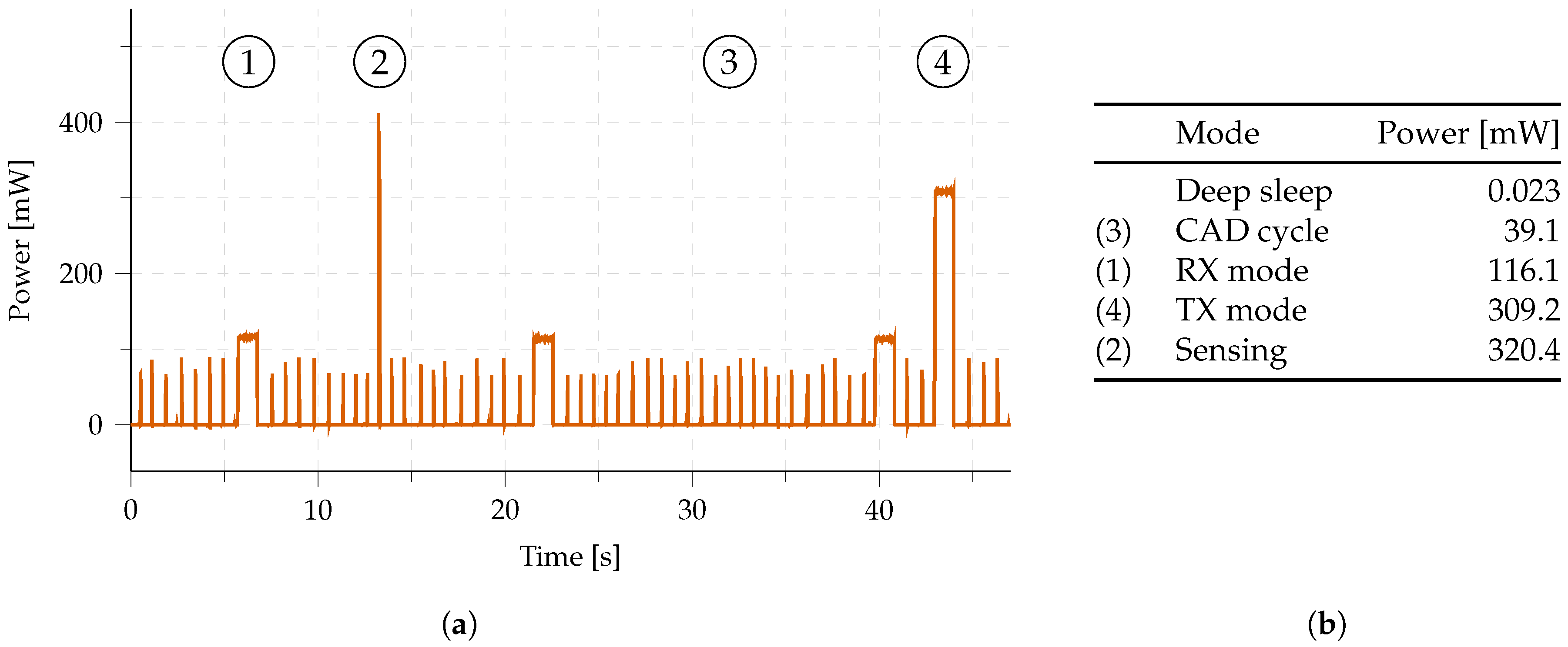
- Energy profile. To accurately determine the energy consumption of each node, a detailed energy profile was constructed based on the power consumption of the in-house developed firmware of this protocol running on the Dramco Uno hardware [27]. The same hardware is used in the experimental evaluation in this work (see Section 3). The energy profile is depicted in Figure 11b. Six states are used in the firmware implementation of the protocol: sleep, channel activity detection (CAD), RX, TX (CAD), TX (data), and sensing. The duration and consumed power in each of these states are accurately measured and included in Figure 11b.
- 3.
- Node location. Each node is put into the network on a specific 3D location. Link properties such as the Euclidean distance between two nodes, especially, are calculated based on these values. Other link parameters (e.g., received signal strength indicator (RSSI) and signal-to-noise ratio (SNR)) are derived from the distance in the Link class.
- 4.
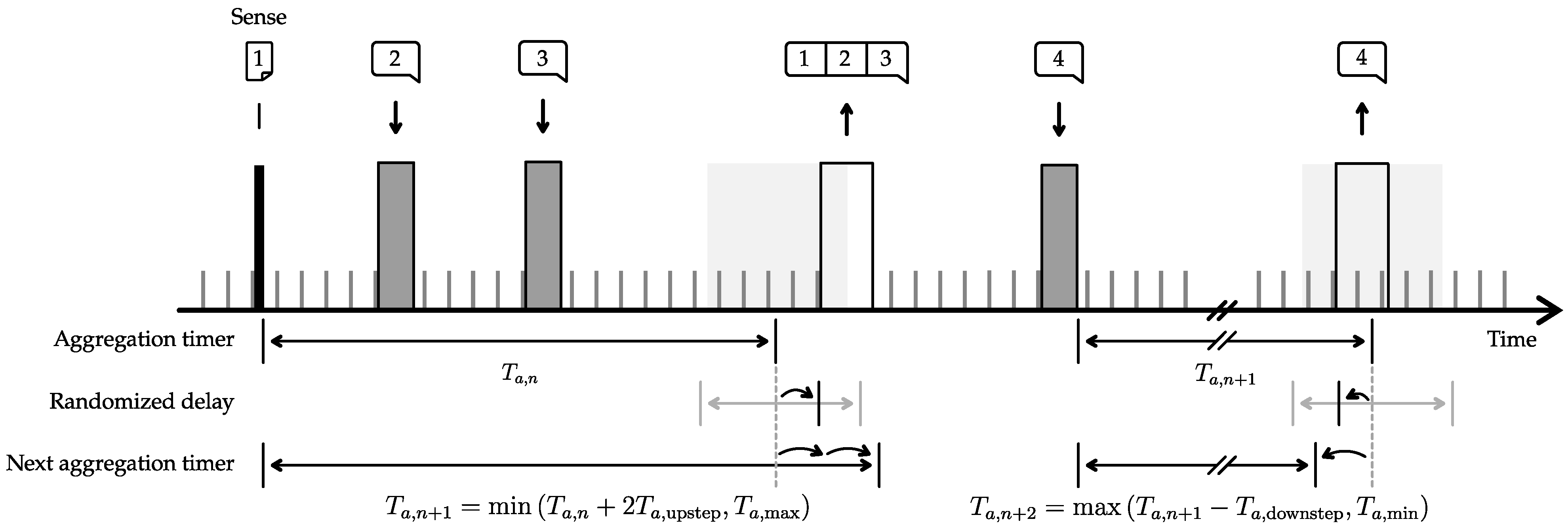
- Protocol timers. The proposed network protocol incorporates multiple timers. All timers are pre-configured based on the list of network-related parameters. Both the sensor and gateway nodes use a sleep timer, to define the channel activity detection (CAD) intervals. One additional timer is running on the gateway node, i.e., the route discovery timer. This timer indicates when a route discovery message needs to be distributed in the network. For sensor nodes, a total of three extra timers are running: sense timer, collision timer, and aggregation timer. The sense timer indicates when the node’s onboard sensors values need to be collected. The collision timer mitigates collisions by including a back-off window after a CAD cycle determines channel activity. The aggregation timer controls the opening and closing of the aggregation window to gather data from multiple nodes in one message (to optimize energy per byte).
- 5.
- Discovered route. Based on the route discovery protocol, each node determines which should be the destination node, i.e., which node should be the recipient of all the messages sent by the node. This destination node and the associated link quality indicator () is stored in the Discovered route class. Whenever a new route discovery message is received, this message is passed to the Discovered route class to update the destination node.
4.2. Messages
4.3. Links
- 1.
- Propagation model. The simulation framework offers, by default, three channel models, based on measurements obtained in multiple environments: open/coastal, forested, and urban environments from [30] (Note that other PL models can be easily implemented in the framework, and thus the framework is not limited to the here proposed models). They are based on a log-distance PL model with a per-link shadowing factor induced by e.g., blockage. The log-normal path loss PL at a distance d in 2D space can be expressed as:where is the reference distance and thus the minimal distance between transmitter and receiver, n is the path loss exponent and models the shadowing component. The shadowing component follows a zero-mean Gaussian distributed random variable with standard deviation , . The parameters for the different environments are summarized in Table 2. The considered PL models deviate from conventional PL models proposed by 3GPP and others, as the network topology differs from the assumed topologies, i.e., the nodes are commonly placed on the same height rather than having an elevated height for the gateway as assumed in other work.
- 2.
- SNR model. In the standard operation, the simulator framework takes thermal noise [31] into account to compute the SNR of the signal, i.e.,with TP the transmit power (in dBm) and N the additive white Gaussian noise (AWGN) power (in dB). The noise power is computed as with the Boltzmann constant, T the temperature and the signal bandwidth. Given that we use the long range (LoRa) PHY with a bandwidth of 500 kHz and assume a temperature of 25 °C Equation (6) becomes
4.4. Output
- Packet delivery ratio: The framework provides both the overall and per-node packet delivery ratio (PDR) w.r.t. a node’s position in the network. This takes both the path loss model (described in Section 4.3) and potential collisions with transmissions from neighboring nodes into account.
- Energy models: All nodes in the network have access to an in-depth energy profile of the used hardware. As a result, energy-related metrics can be simulated: energy consumed by one node (w.r.t. the position in the network), energy load across the network, and the energy consumed per packet (and thus per byte or per payload).
- Latency: The time between the intent of sending a sensor value and the time of receiving the data on the gateway (i.e., latency) is recorded on a per-payload basis.
- Aggregation ratio: The aggregation ratio is defined as the ratio of the messages sent by one node that included payloads from other messages () to the total number of sent messages (:
5. Evaluation
5.1. Experiment 1: Impact of Performing Aggregation in a Multi-Hop Network
5.1.1. Reducing Energy Consumption by Aggregation
5.1.2. Reducing Latency by Dynamic Aggregation
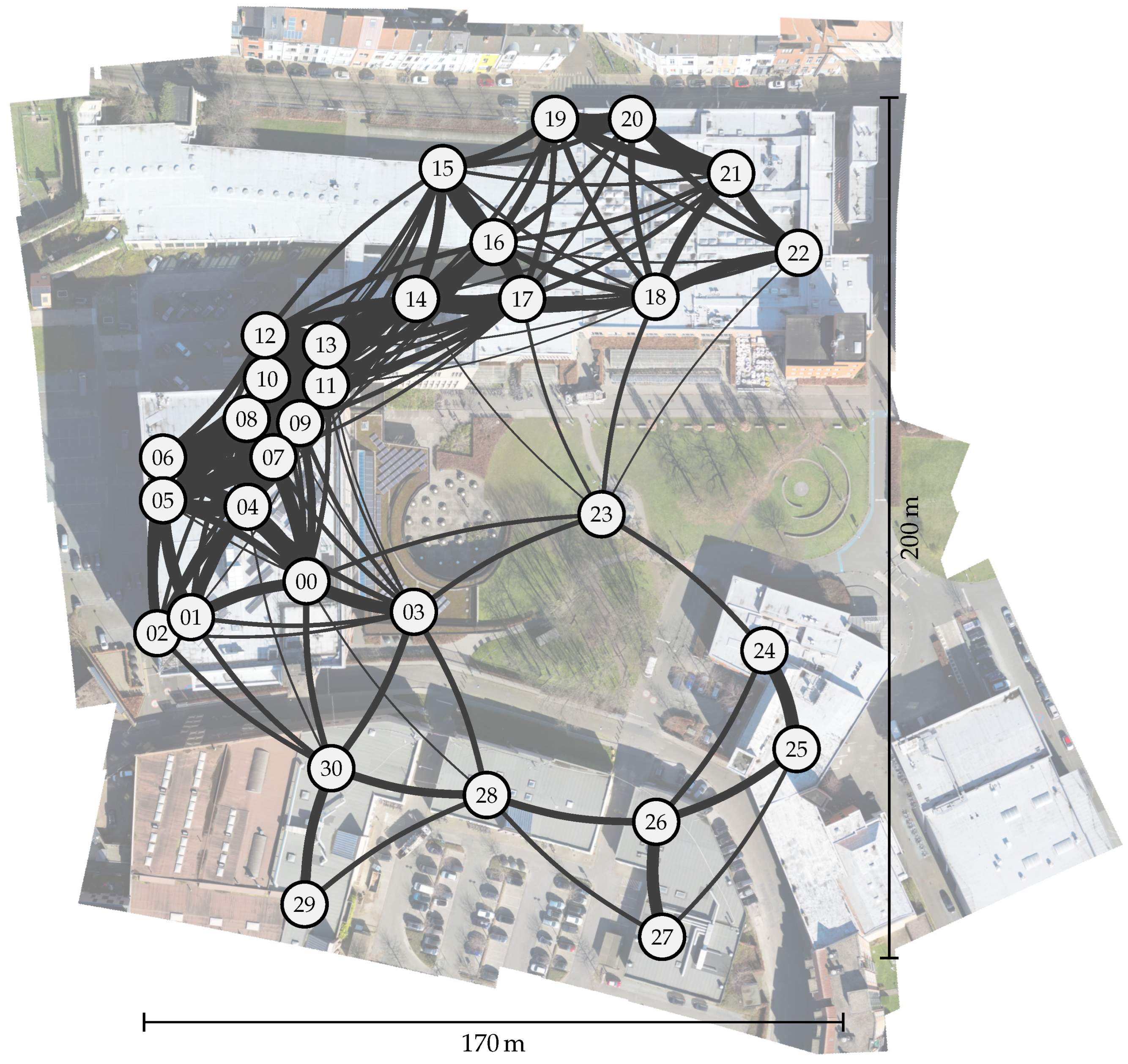
5.2. Experiment 2: University Campus Deployment
5.2.1. Determining Optimal Configuration via the Simulator
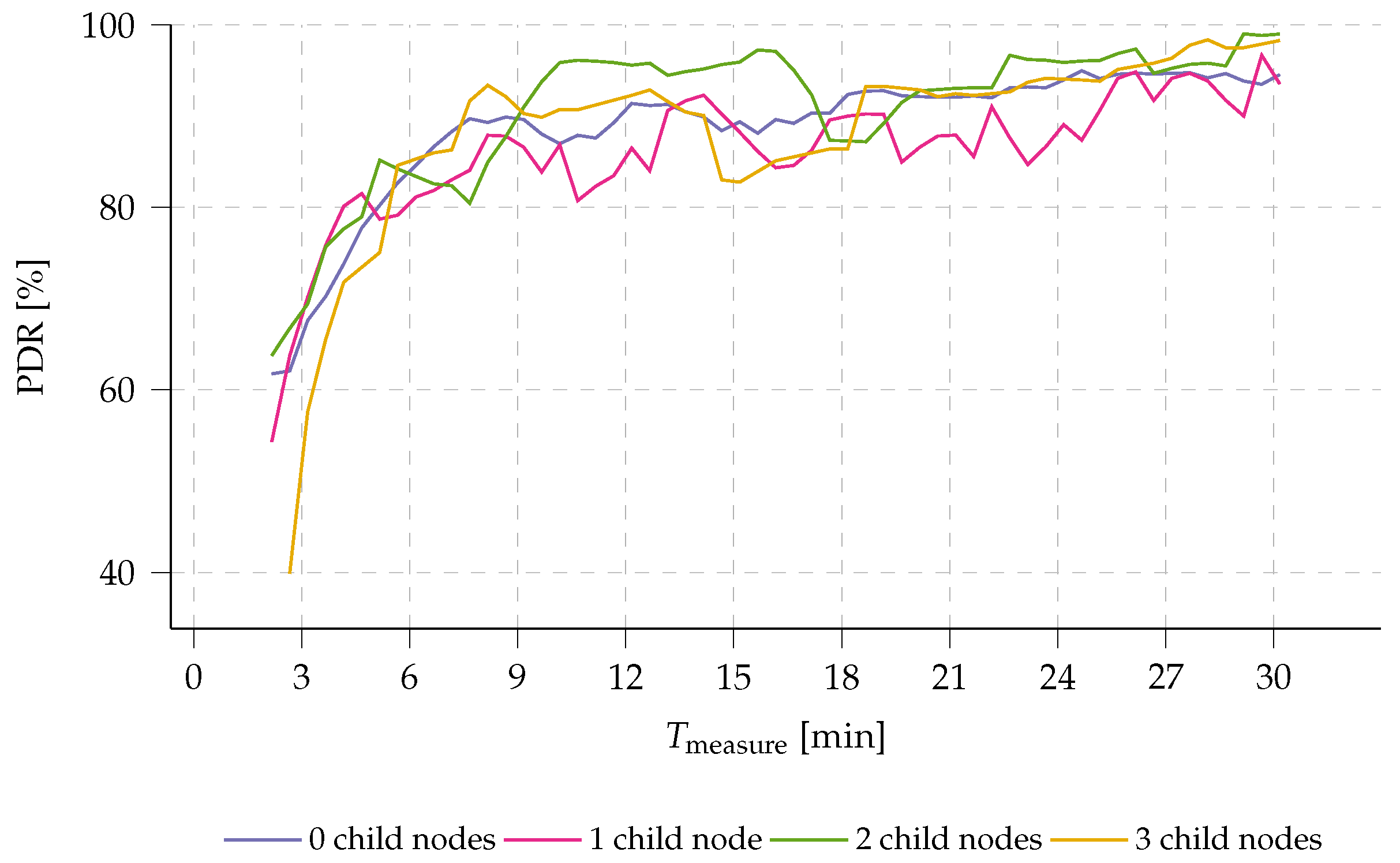
- 1.
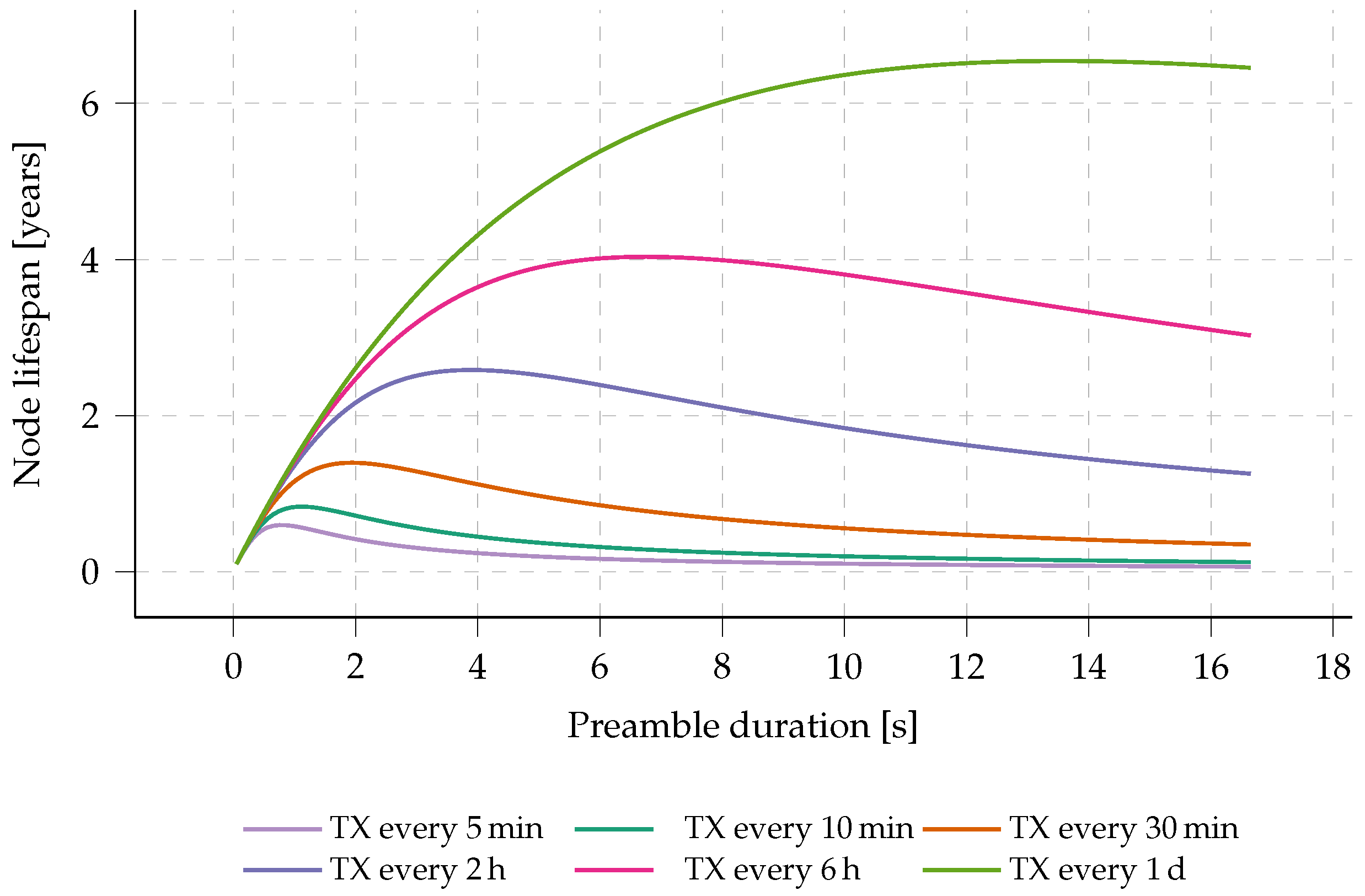
- Network throughput. In the current implementation of the presented multi-hop wireless sensor network (WSN), the size of generated sensor data is fixed for all nodes in the network. As a result, network throughput is highly dependent on the rate at which data are generated by the Internet of Things (IoT) nodes. This rate is determined by the measurement timer used to capture sensor data. Lower values of will lead to higher throughput, possibly saturating the network due to a large number of collisions caused by a longer time-on-air (ToA) per packet, as dictated by the employed prolonged sampling mechanism (see Section 2.1). This is indeed the case. The results in Figure 16 show that, for values of below 6.5 min, the packet delivery ratio (PDR) decreases significantly as decreases further. When is set to 3 min, for example, nodes with three child nodes experience a drop in PDR to only 52%. It is worth noting that this simulation takes the energy optimization w.r.t. the preamble duration into account (as discussed in Section 2.1). As such, preamble duration is adjusted throughout the graph to the optimal value according to . Evidently, energy consumption increases with an increased network throughput as more and longer messages will be sent in the network.
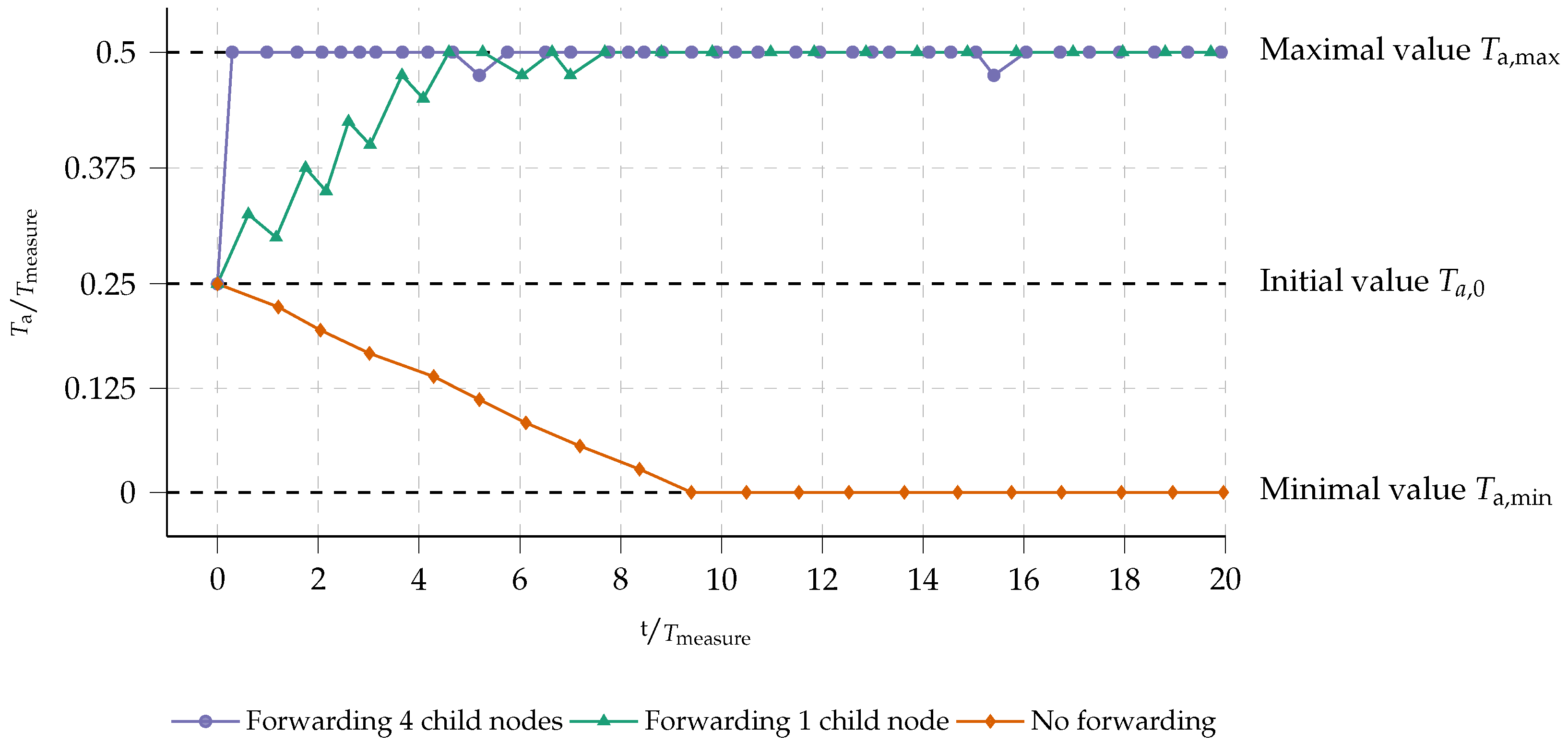
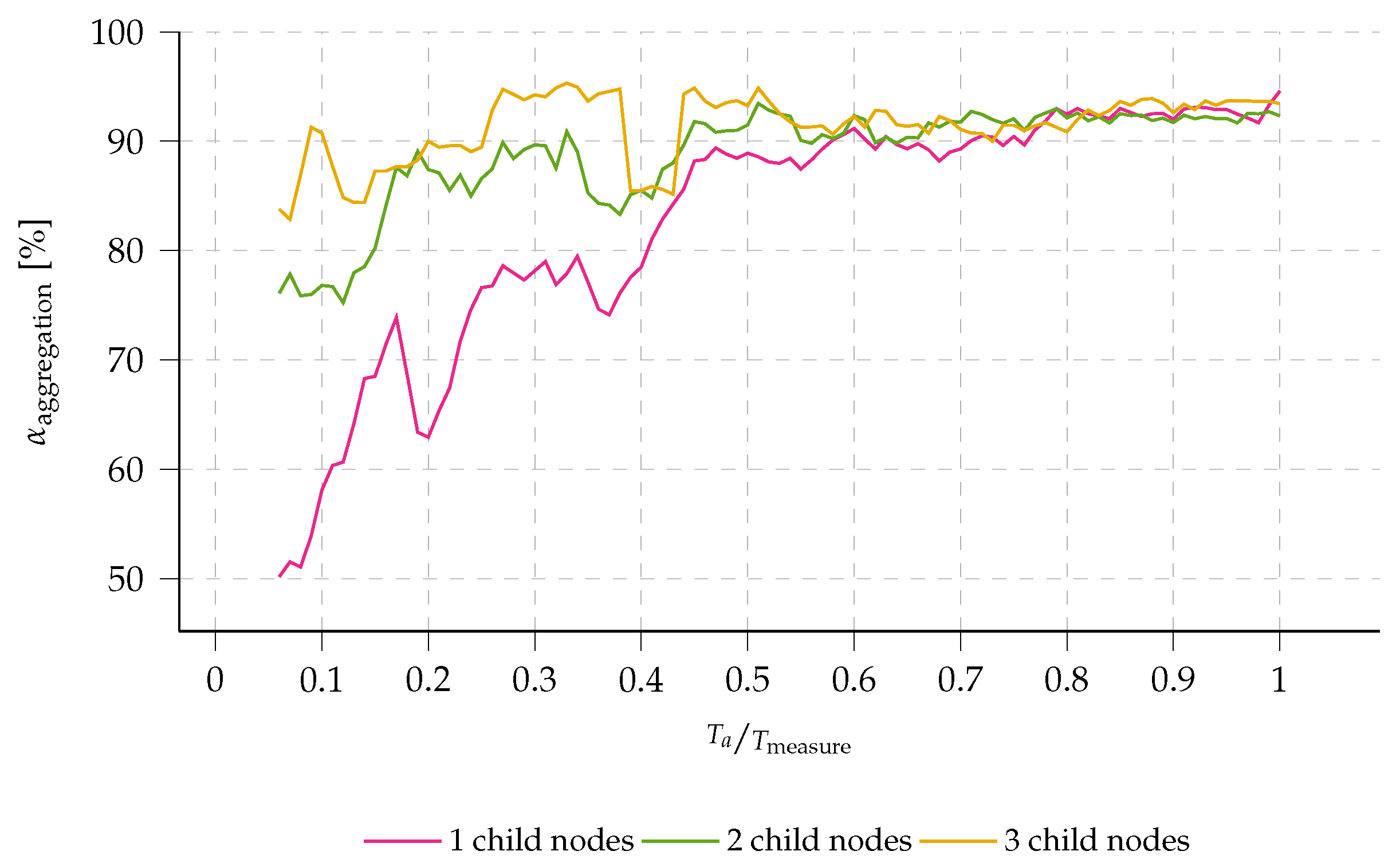
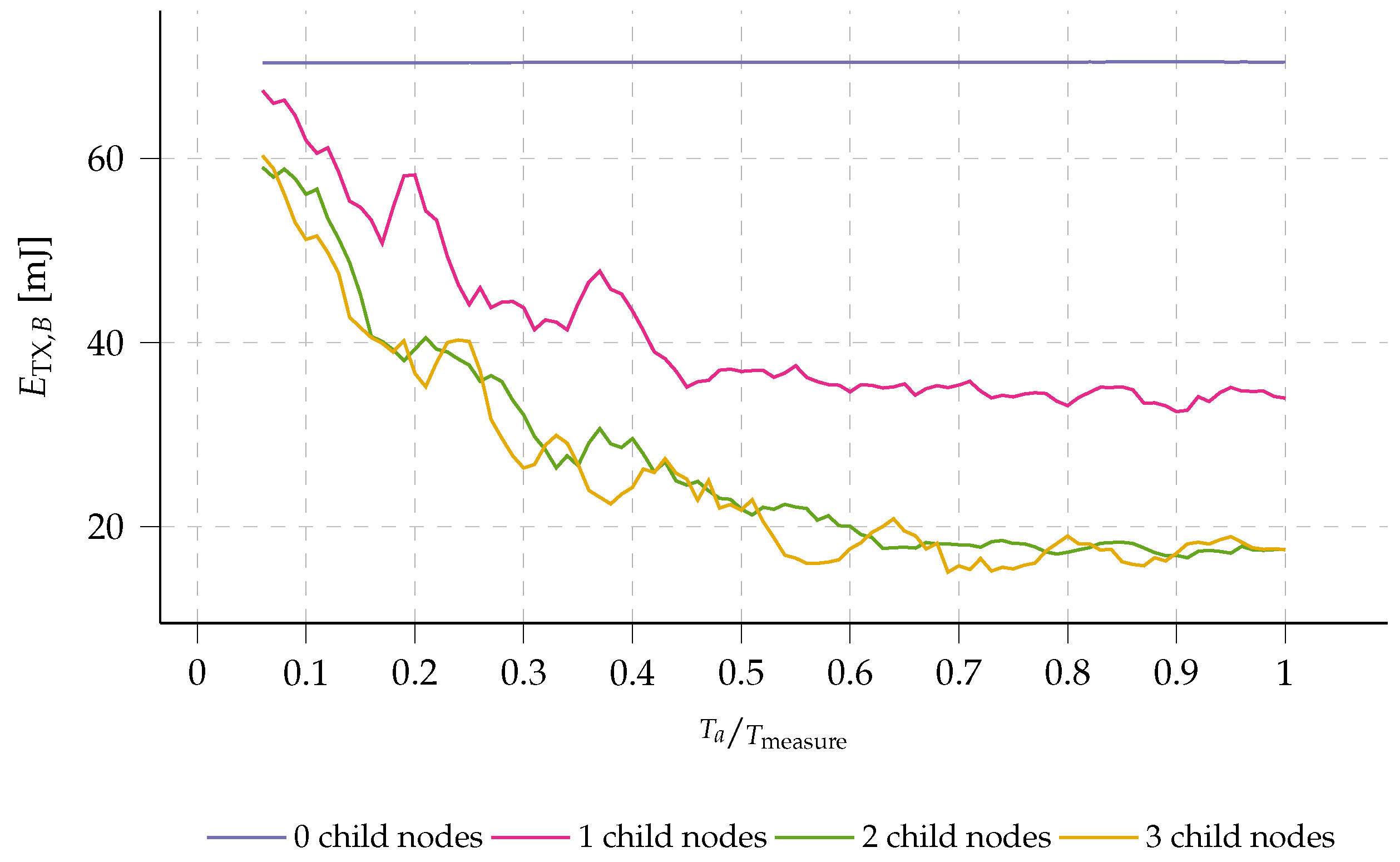
- 2.
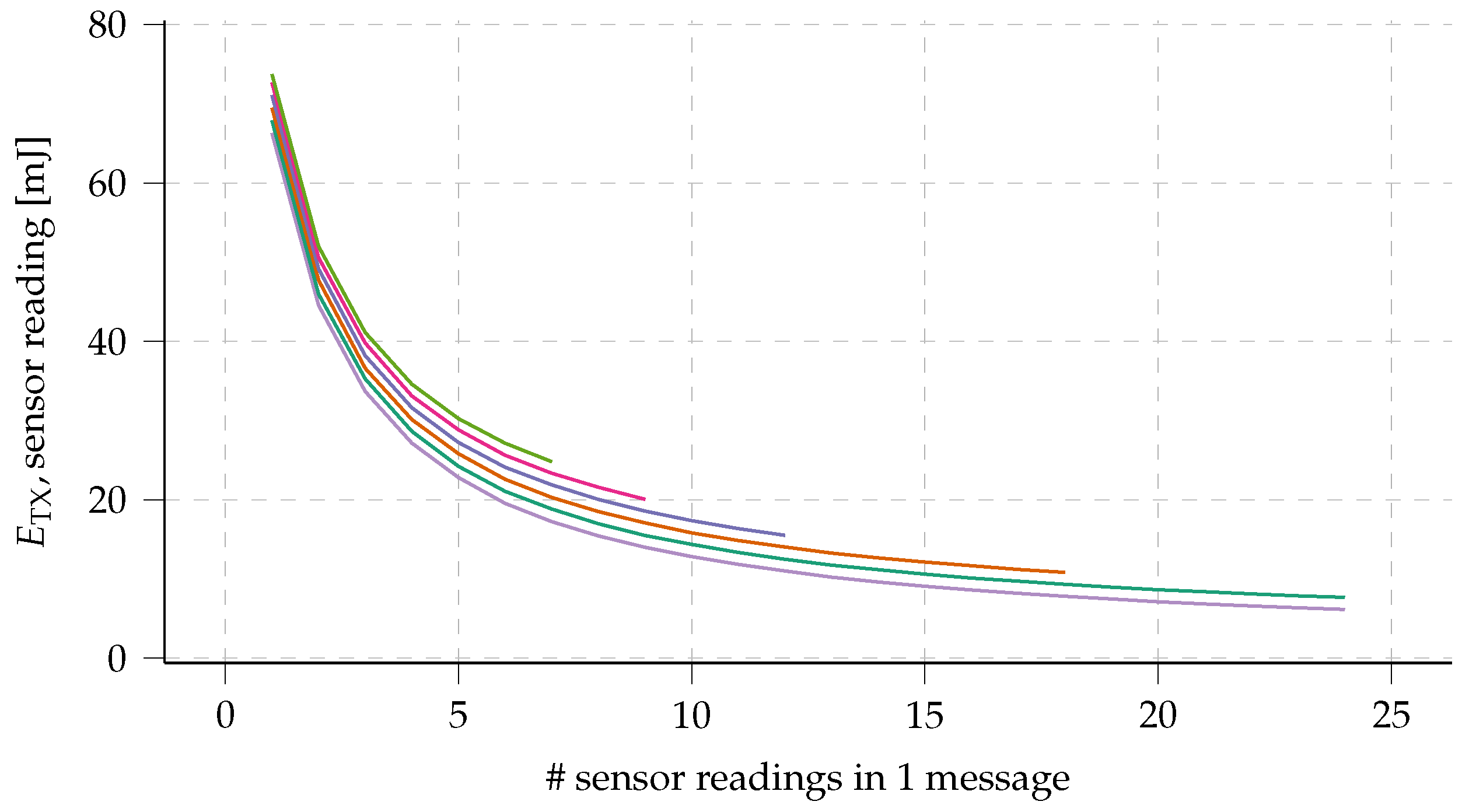
- Aggregation time. As discussed in Section 5.1, increasing the aggregation ratio can reduce energy consumption for all forwarding nodes in a multi-hop network. It is well established that extending the time that nodes wait for incoming messages to aggregate (i.e., increasing the aggregation timer ) can benefit aggregation and energy efficiency. Figure 17 and Figure 18 show the relationship between and and energy efficiency, respectively, for nodes throughout the network.Figure 17 demonstrates that increases with an increase in . However, nodes with a larger number of child nodes (two or more, in this example) experience a more gradual increase in because the likelihood of data being forwarded from one of their child nodes increases with the number of child nodes. The aggregation ratio stabilizes for all nodes at around 90% when .The energy per byte spent on transmitting data () is closely linked to the aggregation ratio as more aggregation will cause to decrease. Yet, inherently also takes the size and amount of the aggregated data into account. As shown in Figure 18, as more message aggregation takes place, less energy per byte is required, leading to overall energy savings in the multi-hop network. It is worth noting that the potential energy savings increase when a node has more child nodes, as more data can be aggregated. stabilizes for all forwarding nodes at . There, a saving of 69% in energy consumption is achieved. By maximizing , nodes with more than two child nodes can save up to 75% of transmission energy, yet at the expense of a disproportionate extra latency.However, increasing also results in an increasingly higher latency, which is disproportionate to the energy savings already obtained at (69%).It is worth noting that simulations also demonstrate how leaf nodes can save additional energy. By aggregating messages, fewer messages are transmitted, which minimizes overhearing by leaf nodes. As a result, less energy is consumed during the receive process, leading to a possible energy reduction of up to 11%.


- 3.
- Randomization parameters To prevent messages from colliding with those transmitted by nearby nodes, some network timers use randomized values for each cycle. For example, the time between two consecutive channel activity detection (CAD) cycles and the aggregation timer includes a randomization margin. Simulations have shown that the randomization of these timers has minimal impact on network performance in terms of latency or energy consumption. It is key to introduce randomization. Simulations show that the degree of randomization has a very low impact on the packet delivery ratio (PDR). The results for these simulations are published in the open source repository of the multi-hop simulator: github.com/DRAMCO/LoRa-multihop-simulator, last accessed on 11 May 2023.
- 4.
- Sensor data size. Increasing the data size in the presented multi-hop network will result in higher energy consumption for all nodes since this increases the airtime required to transmit the data. In addition, simulations have shown that when the data size is increased to, for example, 64 bytes, the aggregation ratio can decrease by up to 9%. This is because the aggregation buffers fill up faster, reducing the amount of aggregation that can take place and leading to a further slight increase in energy consumption. Despite the prolonged airtime, the network’s packet delivery ratio (PDR) is not significantly affected by increasing the data size, according to simulations. The results for these simulations are published in the open source repository of the multi-hop simulator: github.com/DRAMCO/LoRa-multihop-simulator, last accessed on 11 May 2023.
5.2.2. Real-World Multi-Hop Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABP | authentication by personalisation |
| AWGN | additive white Gaussian noise |
| CAD | channel activity detection |
| CDF | cumulative distribution function |
| CRC | cyclic redundancy check |
| CSS | chirp spread spectrum |
| FDMA | frequency division multiple access |
| IoT | Internet of Things |
| LoRa | long range |
| LoRaWAN | long-range wide-area network |
| LPWAN | low-power wide-area network |
| LQI | link quality indicator |
| MAC | Medium Access Control |
| PDR | packet delivery ratio |
| PL | path loss |
| PLL | phase-locked loop |
| PLR | packet loss ratio |
| RSSI | received signal strength indicator |
| RX | receiver |
| SF | spreading factor |
| SNR | signal-to-noise ratio |
| TDMA | time division multiple access |
| TDOA | ime-difference-of-arrival |
| ToA | time-on-air |
| TSCH | time slotted channel hopping |
| WSN | wireless sensor network |
References
- Dafflon, B.; Wielandt, S.; Lamb, J.; McClure, P.; Shirley, I.; Uhlemann, S.; Wang, C.; Fiolleau, S.; Brunetti, C.; Akins, F.H.; et al. A distributed temperature profiling system for vertically and laterally dense acquisition of soil and snow temperature. Cryosphere 2022, 16, 719–736. [Google Scholar] [CrossRef]
- Geldhof, B.; Pattyn, J.; Eyland, D.; Carpentier, S.; Van de Poel, B. A digital sensor to measure real-time leaf movements and detect abiotic stress in plants. Plant Physiol. 2021, 187, 1131–1148. [Google Scholar] [CrossRef]
- Callebaut, G.; Leenders, G.; Van Mulders, J.; Ottoy, G.; De Strycker, L.; Van der Perre, L. The Art of Designing Remote IoT Devices–Technologies and Strategies for a Long Battery Life. Sensors 2021, 21, 913. [Google Scholar] [CrossRef] [PubMed]
- Petajajarvi, J.; Mikhaylov, K.; Roivainen, A.; Hanninen, T.; Pettissalo, M. On the coverage of LPWANs: Range evaluation and channel attenuation model for LoRa technology. In Proceedings of the 2015 14th International Conference on Its Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015; pp. 55–59. [Google Scholar]
- Rochester, E.M.; Yousuf, A.M.; Ousat, B.; Ghaderi, M. Lightweight carrier sensing in LoRa: Implementation and performance evaluation. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Aslam, M.S.; Khan, A.; Atif, A.; Hassan, S.A.; Mahmood, A.; Qureshi, H.K.; Gidlund, M. Exploring multi-hop LoRa for green smart cities. IEEE Netw. 2019, 34, 225–231. [Google Scholar] [CrossRef]
- Sciullo, L.; Trotta, A.; Di Felice, M. Design and performance evaluation of a LoRa-based mobile emergency management system (LOCATE). Ad Hoc Netw. 2020, 96, 101993. [Google Scholar] [CrossRef]
- Sartori, B.; Thielemans, S.; Bezunartea, M.; Braeken, A.; Steenhaut, K. Enabling RPL multihop communications based on LoRa. In Proceedings of the 2017 IEEE 13th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Rome, Italy, 9–11 October 2017; pp. 1–8. [Google Scholar]
- Zhou, W.; Tong, Z.; Dong, Z.Y.; Wang, Y. LoRa-Hybrid: A LoRaWAN Based multihop solution for regional microgrid. In Proceedings of the 2019 IEEE 4th International Conference on Computer and Communication Systems (ICCCS), Singapore, 23–25 February 2019; pp. 650–654. [Google Scholar]
- Prade, L.; Moraes, J.; de Albuquerque, E.; Rosário, D.; Both, C.B. Multi-radio and multi-hop LoRa communication architecture for large scale IoT deployment. Comput. Electr. Eng. 2022, 102, 108242. [Google Scholar] [CrossRef]
- Leonardi, L.; Bello, L.L.; Patti, G. MRT-LoRa: A multi-hop real-time communication protocol for industrial IoT applications over LoRa networks. Comput. Commun. 2023, 199, 72–86. [Google Scholar] [CrossRef]
- Zhu, G.; Liao, C.H.; Sakdejayont, T.; Lai, I.W.; Narusue, Y.; Morikawa, H. Improving the capacity of a mesh LoRa network by spreading-factor-based network clustering. IEEE Access 2019, 7, 21584–21596. [Google Scholar] [CrossRef]
- Piyare, R.; Murphy, A.L.; Magno, M.; Benini, L. On-demand LoRa: Asynchronous TDMA for energy efficient and low latency communication in IoT. Sensors 2018, 18, 3718. [Google Scholar] [CrossRef]
- Bezunartea, M.; Van Glabbeek, R.; Braeken, A.; Tiberghien, J.; Steenhaut, K. Towards energy efficient LoRa multihop networks. In Proceedings of the 2019 IEEE International Symposium on Local and Metropolitan Area Networks (LANMAN), Paris, France, 1–3 July 2019; pp. 1–3. [Google Scholar]
- Abrardo, A.; Pozzebon, A. A multi-hop LoRa linear sensor network for the monitoring of underground environments: The case of the Medieval Aqueducts in Siena, Italy. Sensors 2019, 19, 402. [Google Scholar] [CrossRef]
- Abrardo, A.; Fort, A.; Landi, E.; Mugnaini, M.; Panzardi, E.; Pozzebon, A. Black powder flow monitoring in pipelines by means of multi-hop LoRa networks. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, 4–6 June 2019; pp. 312–316. [Google Scholar]
- Escobar, J.J.L.; Gil-Castiñeira, F.; Redondo, R.P.D. JMAC protocol: A cross-layer multi-hop protocol for LoRa. Sensors 2020, 20, 6893. [Google Scholar] [CrossRef] [PubMed]
- Mai, D.L.; Kim, M.K. Multi-hop LoRa network protocol with minimized latency. Energies 2020, 13, 1368. [Google Scholar] [CrossRef]
- Adame Vázquez, T.; Barrachina-Muñoz, S.; Bellalta, B.; Bel, A. HARE: Supporting efficient uplink multi-hop communications in self-organizing LPWANs. Sensors 2018, 18, 115. [Google Scholar] [CrossRef] [PubMed]
- Tran, H.P.; Jung, W.S.; Yoon, T.; Yoo, D.S.; Oh, H. A two-hop real-time LoRa protocol for industrial monitoring and control systems. IEEE Access 2020, 8, 126239–126252. [Google Scholar] [CrossRef]
- Tran, H.P.; Jung, W.S.; Yoo, D.S.; Oh, H. Design and Implementation of a Multi-Hop Real-Time LoRa Protocol for Dynamic LoRa Networks. Sensors 2022, 22, 3518. [Google Scholar] [CrossRef] [PubMed]
- Bachir, A.; Dohler, M.; Watteyne, T.; Leung, K.K. MAC essentials for wireless sensor networks. IEEE Commun. Surv. Tutor. 2010, 12, 222–248. [Google Scholar] [CrossRef]
- Iqbal, M.S.; Wiriasto, G.W. Multi-hop uplink for low power wide area networks using LoRa technology. In Proceedings of the 2019 6th International Conference on Information Technology, Computer and Electrical Engineering (ICITACEE), Semarang, Indonesia, 26–27 September 2019; pp. 1–5. [Google Scholar]
- Cotrim, J.R.; Kleinschmidt, J.H. LoRaWAN mesh networks: A review and classification of multihop communication. Sensors 2020, 20, 4273. [Google Scholar] [CrossRef]
- Leenders, G.; Ottoy, G.; Callebaut, G.; Van der Perre, L.; De Strycker, L. An Energy-Efficient LoRa Multi-Hop Protocol through Preamble Sampling. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC) (IEEE WCNC 2023), Glasgow, UK, 26–29 March 2023. [Google Scholar]
- Semtech. SX1276/77/78/79. Datasheet: SX1276/77/78/79-137 MHz to 1020 MHz Low Power Long Range Transceiver. 2016, 132. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1276 (accessed on 30 December 2020).
- Thoen, B.; Callebaut, G.; Leenders, G.; Wielandt, S. A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications. Sensors 2019, 19, 585. [Google Scholar] [CrossRef]
- Callebaut, G.; Ottoy, G.; Van der Perre, L. Cross-layer framework and optimization for efficient use of the energy budget of IoT nodes. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Leenders, G.; Ottoy, G.; Callebaut, G. Dramco Uno: A Low-Entry IoT Learning Platform for STE (A) M-Oriented Education. In Proceedings of the 2022 Symposium on Information Theory and Signal Processing in the Benelux, Louvain-la-Neuve, Belgium, 1–2 June 2022; p. 135. [Google Scholar]
- Callebaut, G.; Van der Perre, L. Characterization of LoRa point-to-point path loss: Measurement campaigns and modeling considering censored data. IEEE Internet Things J. 2019, 7, 1910–1918. [Google Scholar] [CrossRef]
- Semtech. AN1200.22. Application Note: LoRa Modulation Basics. 2015, 46. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1272 (accessed on 30 December 2020).
- Al Homssi, B.; Dakic, K.; Maselli, S.; Wolf, H.; Kandeepan, S.; Al-Hourani, A. IoT network design using open-source LoRa coverage emulator. IEEE Access 2021, 9, 53636–53646. [Google Scholar] [CrossRef]
- Liu, Z.; Elhanany, I. RL-MAC: A reinforcement learning based MAC protocol for wireless sensor networks. Int. J. Sens. Netw. 2006, 1, 117–124. [Google Scholar] [CrossRef]



















| Environment | n | |||
|---|---|---|---|---|
| Open/coastal | 1 | 43.96 | 3.62 | 27.51 |
| Forested | 1 | 95.52 | 2.03 | 6.87 |
| Urban | 1 | 74.85 | 2.75 | 11.25 |
| Parameter | Symbol | Value |
|---|---|---|
| Measure interval | 10 min | |
| Minimal aggregation timer | 0 s | |
| Initial aggregation timer | 2.5 min | |
| Maximal aggregation timer | 5 min | |
| Aggregation upstep | 1 min | |
| Aggregation downstep | 30 s | |
| TX buffer size | 150 B | |
| Payload size | 6 B | |
| LoRa spreading factor | 7 | |
| LoRa bandwidth | 500 kHz | |
| Preamble width | 1 s |
| Node UID | # Children | [] | [] | Savings | |
|---|---|---|---|---|---|
| 02 | 3 | 96% | 52.40 | 35.53 | 32% |
| 04 | 4 | 92% | 52.40 | 20.48 | 61% |
| 06 | 1 | 48% | 52.40 | 48.20 | 8% |
| 09 | 3 | 89% | 52.40 | 33.27 | 37% |
| 13 | 2 | 77% | 52.40 | 43.02 | 18% |
| 16 | 1 | 51% | 52.40 | 43.73 | 16% |
| Parameter | Symbol | Value |
|---|---|---|
| Route discovery | 6 h | |
| Measure interval | 30 min | |
| Minimal aggregation timer | 0 s | |
| Initial aggregation timer | 12.5 min | |
| Maximal aggregation timer | 15 min | |
| Aggregation upstep | 1 min | |
| Aggregation downstep | 30 s | |
| TX buffer size | 150 B | |
| Payload size | 12 B | |
| LoRa spreading factor | 7 | |
| LoRa bandwidth | 500 kHz | |
| Preamble width | 1.91 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leenders, G.; Callebaut, G.; Ottoy, G.; Van der Perre, L.; De Strycker, L. An Energy-Efficient LoRa Multi-Hop Protocol through Preamble Sampling for Remote Sensing. Sensors 2023, 23, 4994. https://doi.org/10.3390/s23114994
Leenders G, Callebaut G, Ottoy G, Van der Perre L, De Strycker L. An Energy-Efficient LoRa Multi-Hop Protocol through Preamble Sampling for Remote Sensing. Sensors. 2023; 23(11):4994. https://doi.org/10.3390/s23114994
Chicago/Turabian StyleLeenders, Guus, Gilles Callebaut, Geoffrey Ottoy, Liesbet Van der Perre, and Lieven De Strycker. 2023. "An Energy-Efficient LoRa Multi-Hop Protocol through Preamble Sampling for Remote Sensing" Sensors 23, no. 11: 4994. https://doi.org/10.3390/s23114994