


Research on Kinematic and Static Filtering of the ESKF Based on INS/GNSS/UWB

Abstract
:1. Introduction
2. Error-State Kalman Filter
2.1. Kinematic Models
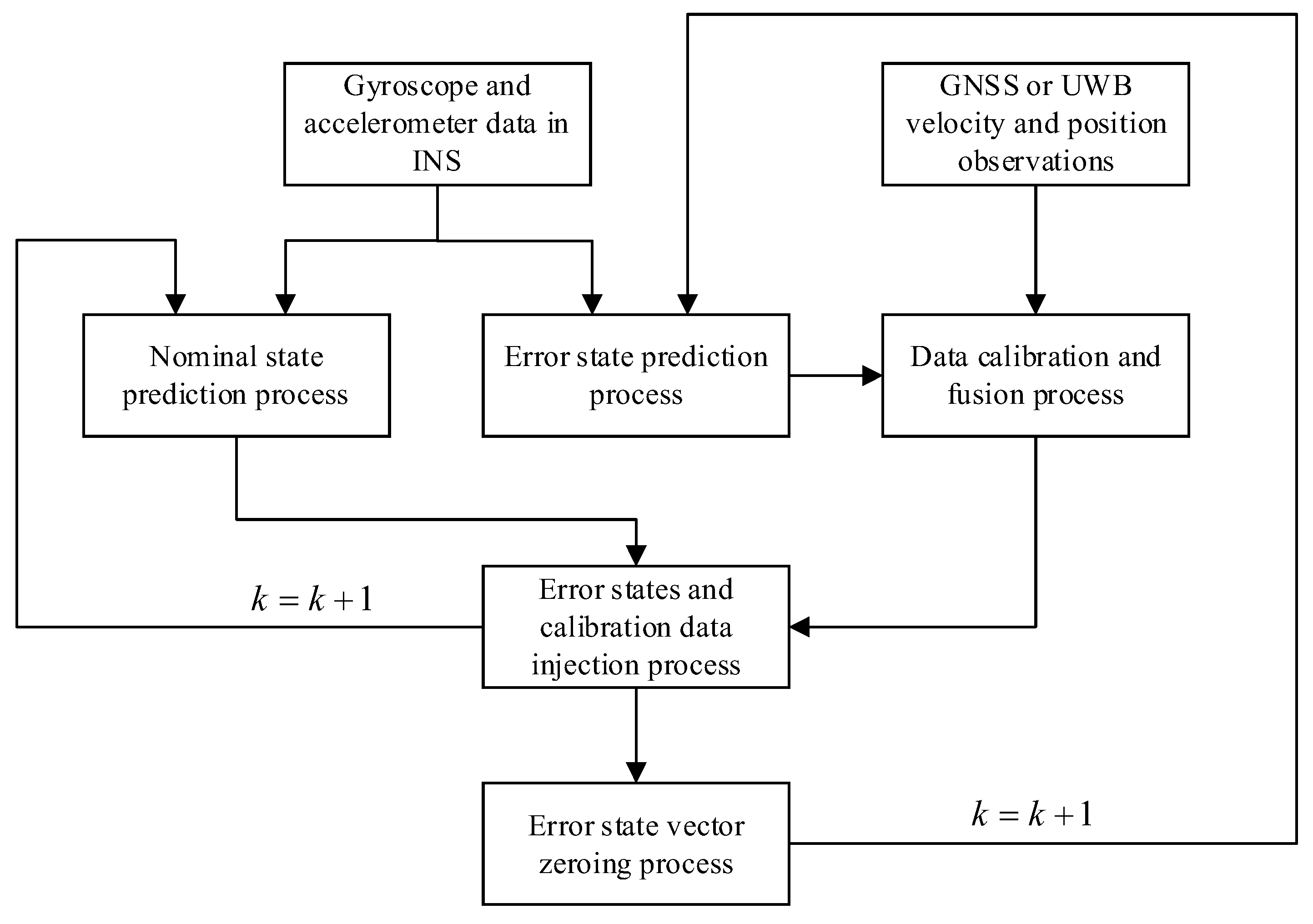
2.2. ESKF State-Prediction Model
2.3. ESKF Measurement-Prediction Model
2.4. ESKF Error-State-Vector Injection and Zeroing
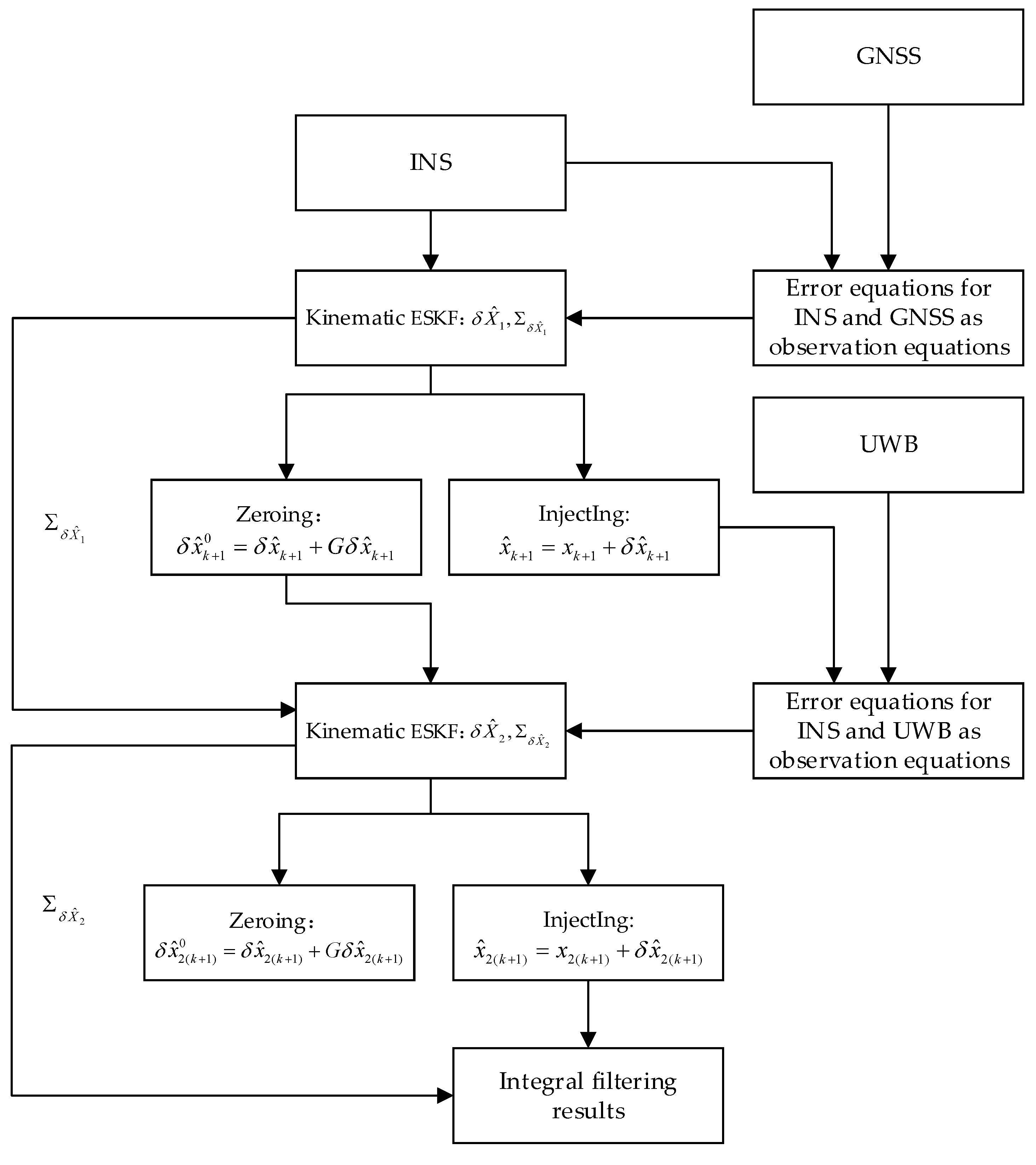
3. Kinematic and Static Filtering of the ESKF Based on INS/GNSS/UWB
3.1. Kinematic ESKF Process
3.2. Static ESKF Process
4. Simulation-Experiment Verification
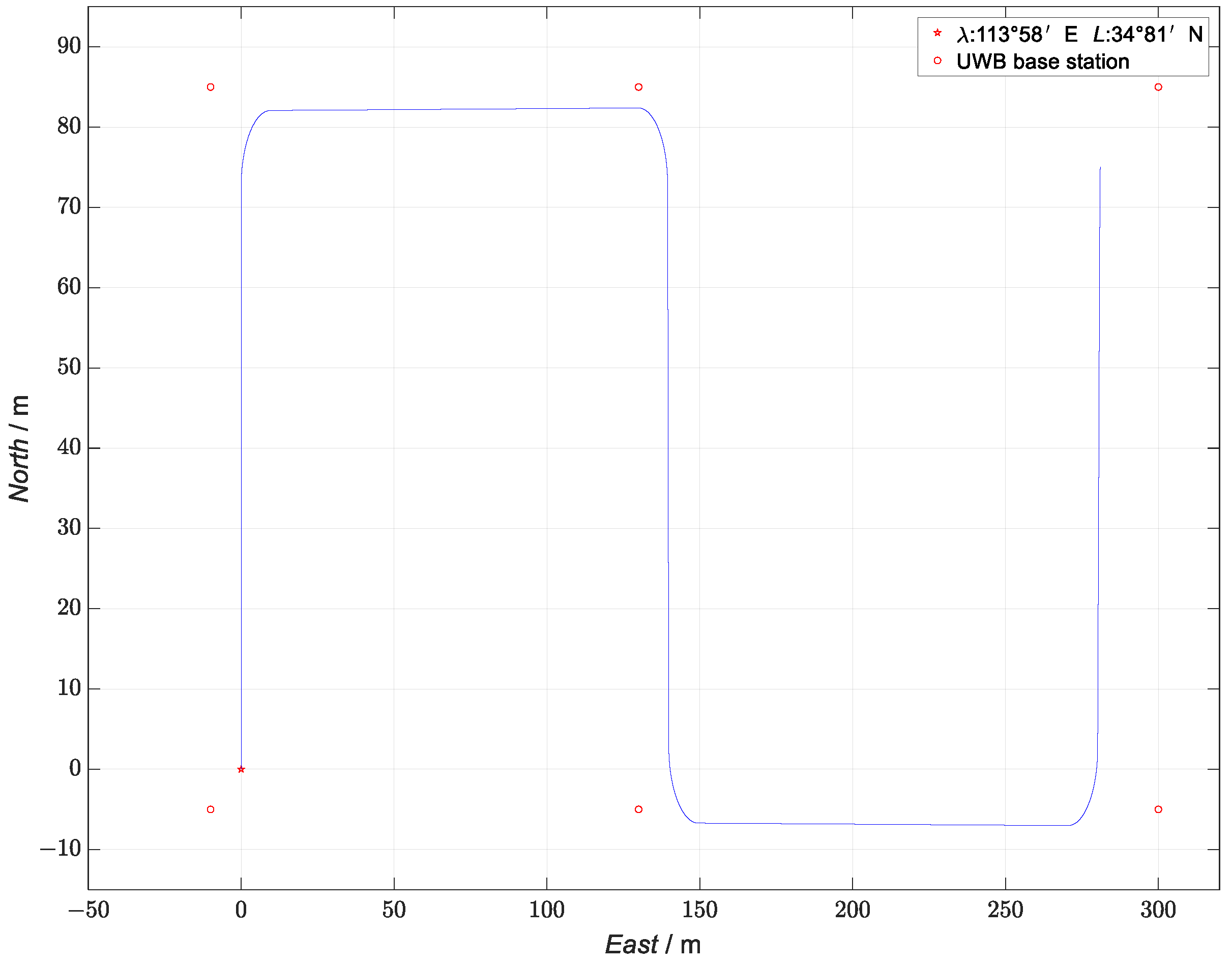
4.1. Coordinate- and Trajectory-Simulation Settings
4.2. Sensor-Simulation-Parameter Setting
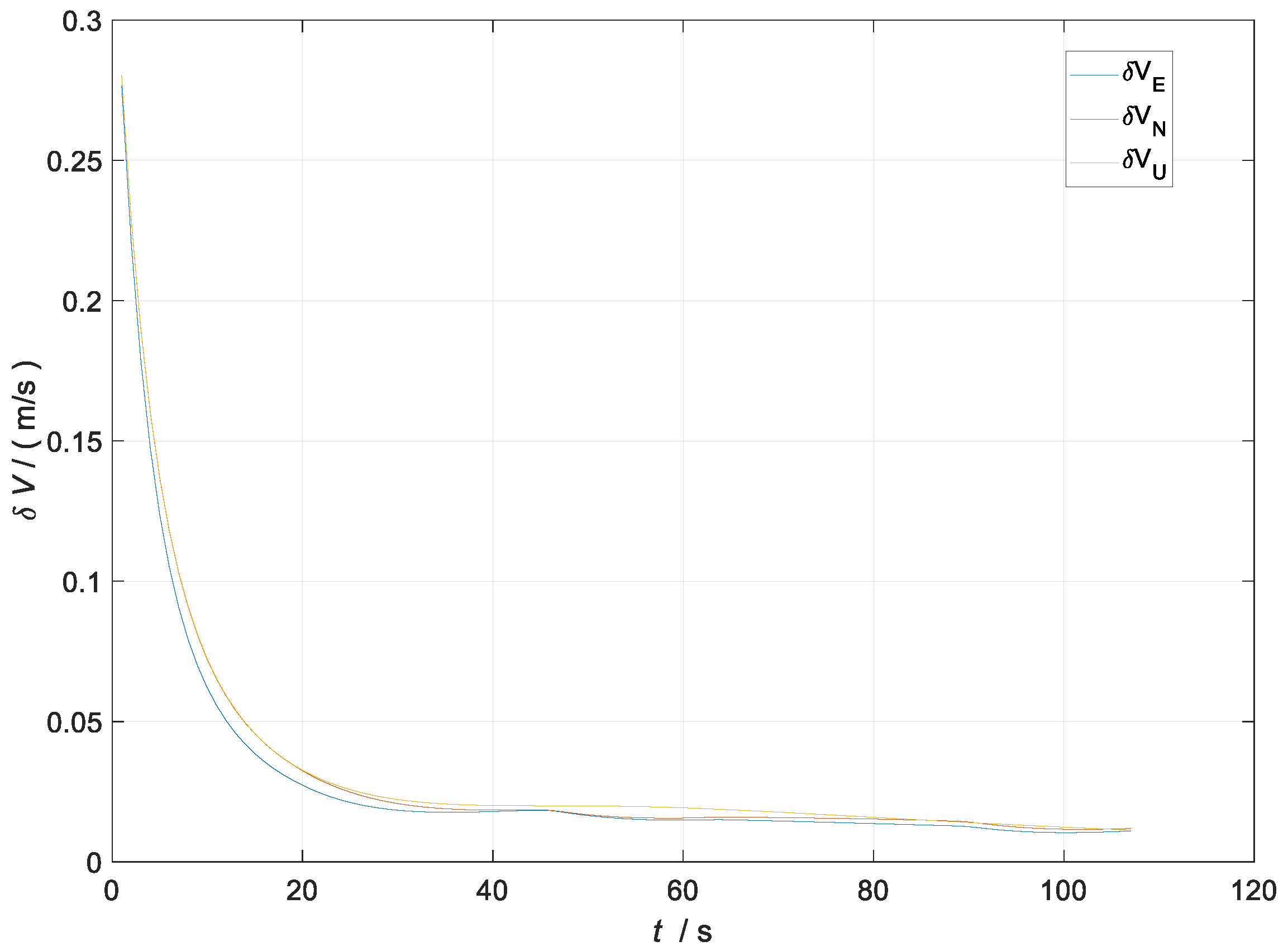
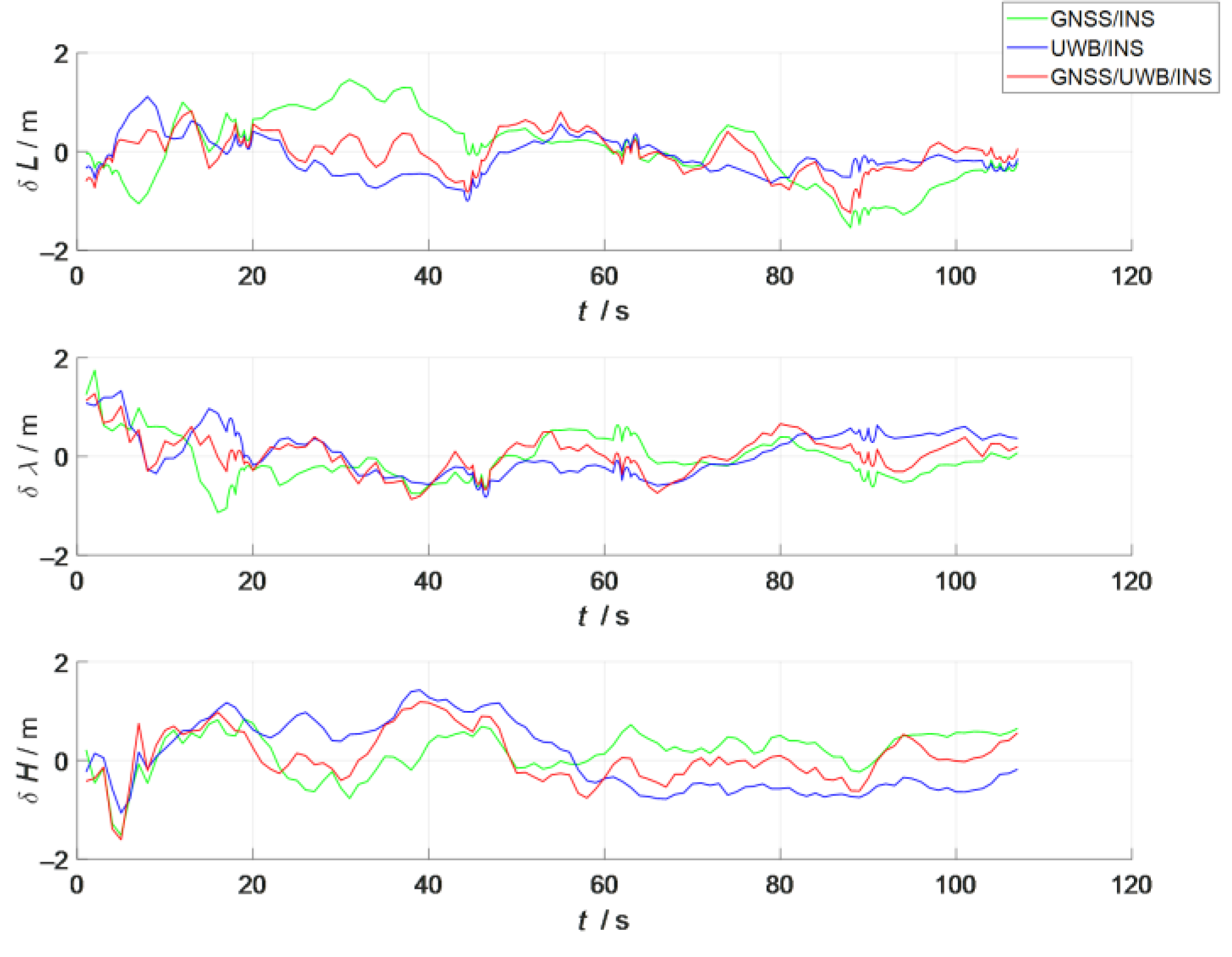
4.3. Simulation Results and Analysis
5. Comparative Experiments and Analysis
5.1. Experimental Analysis of Sensor-Accuracy Comparisons
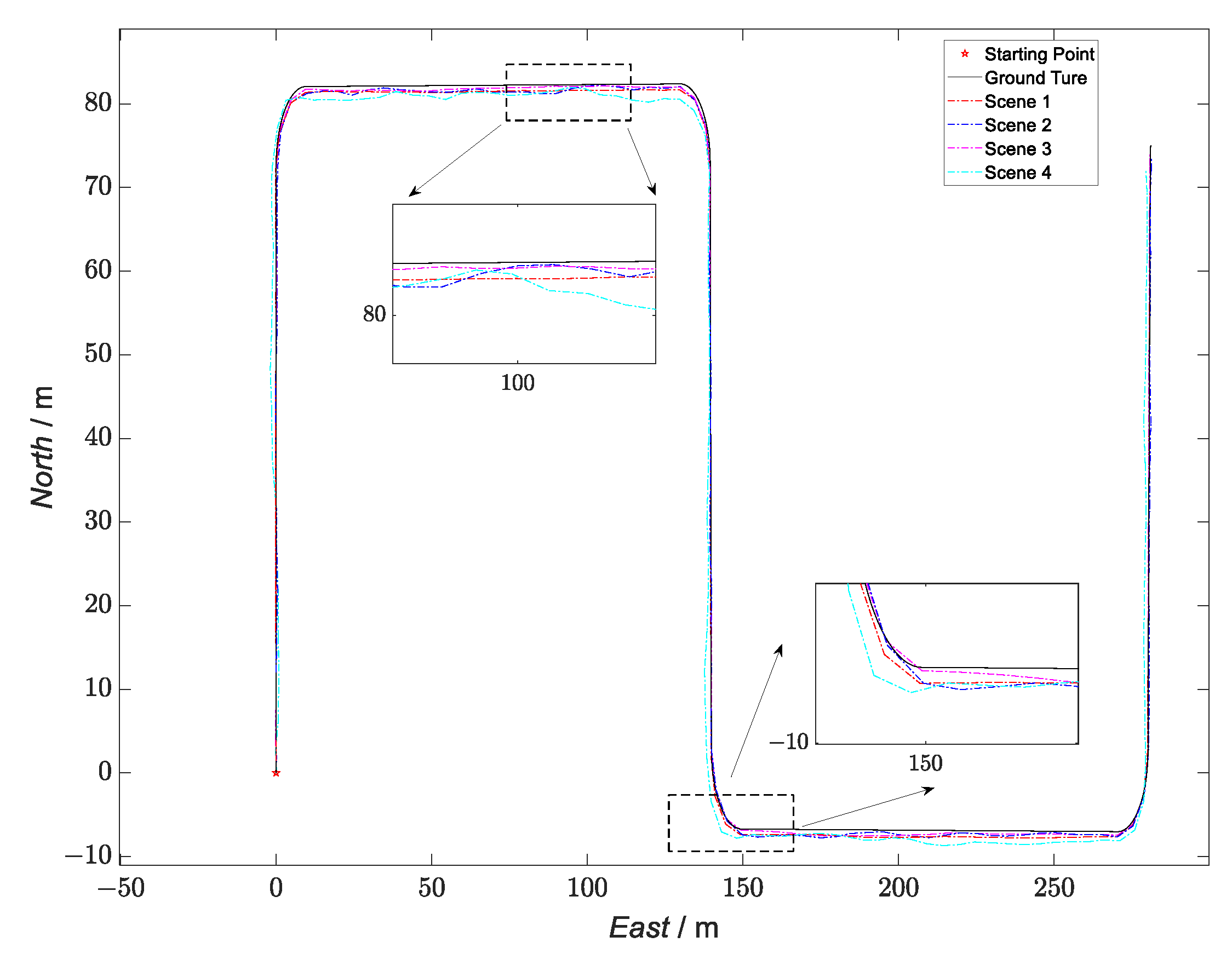
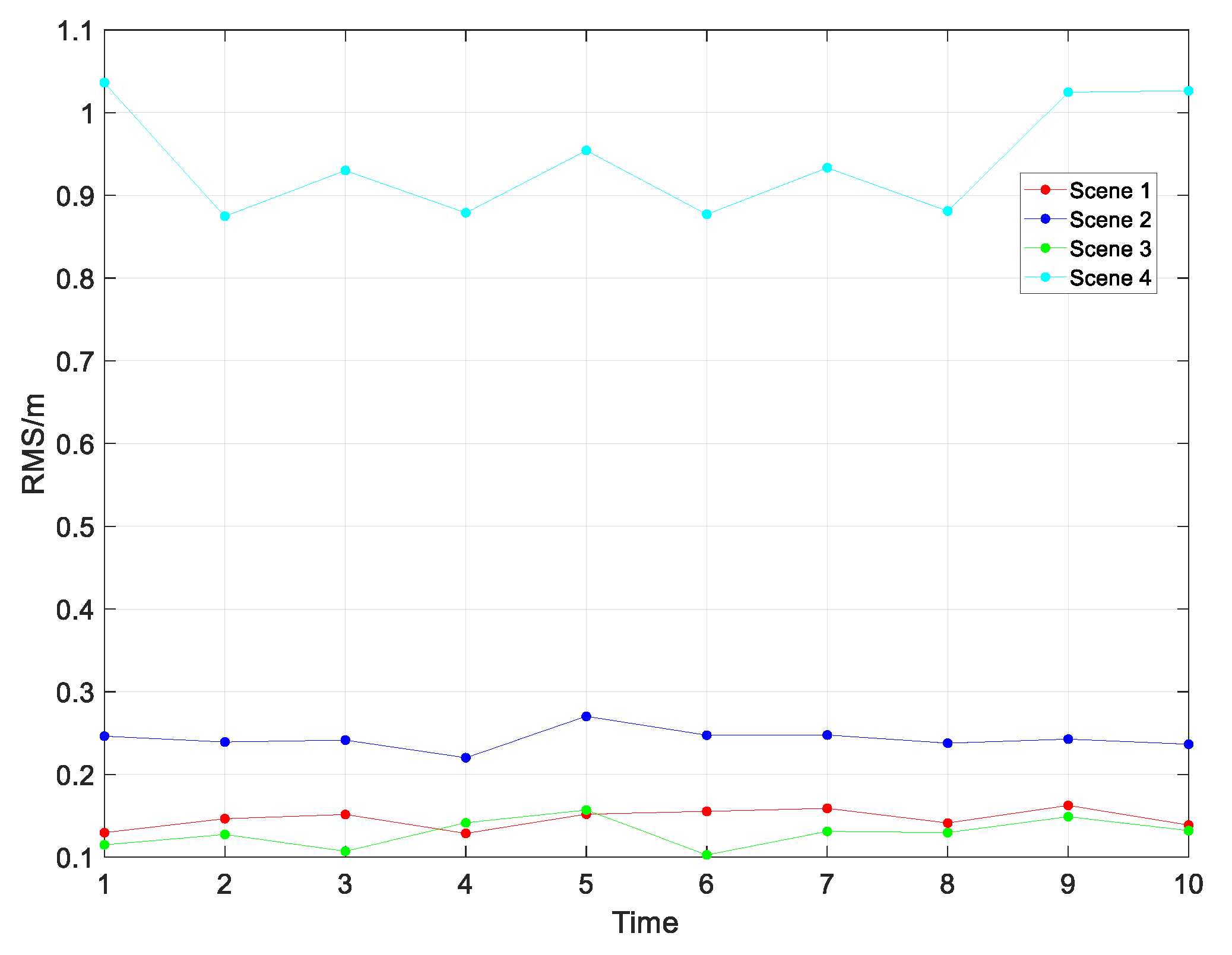
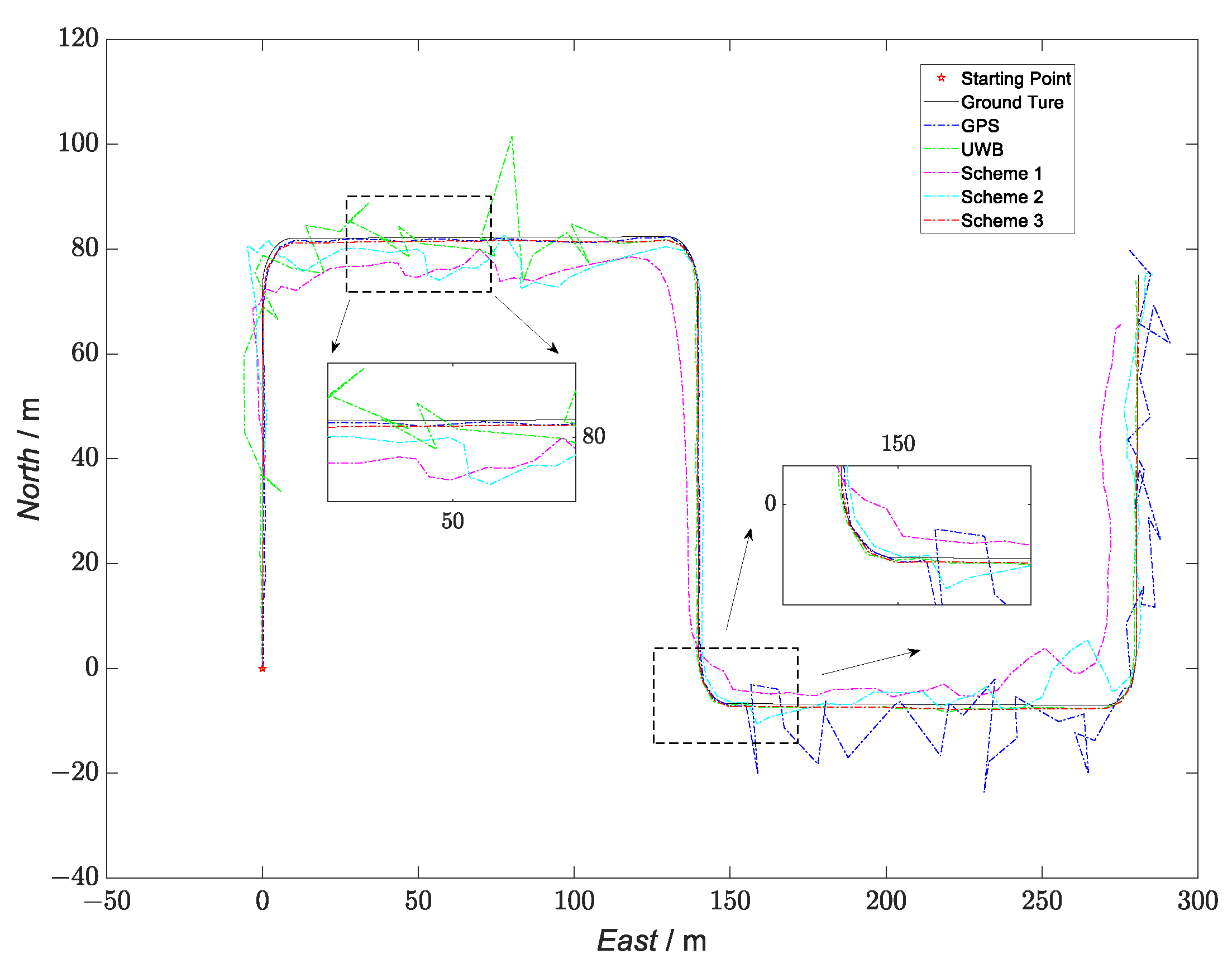
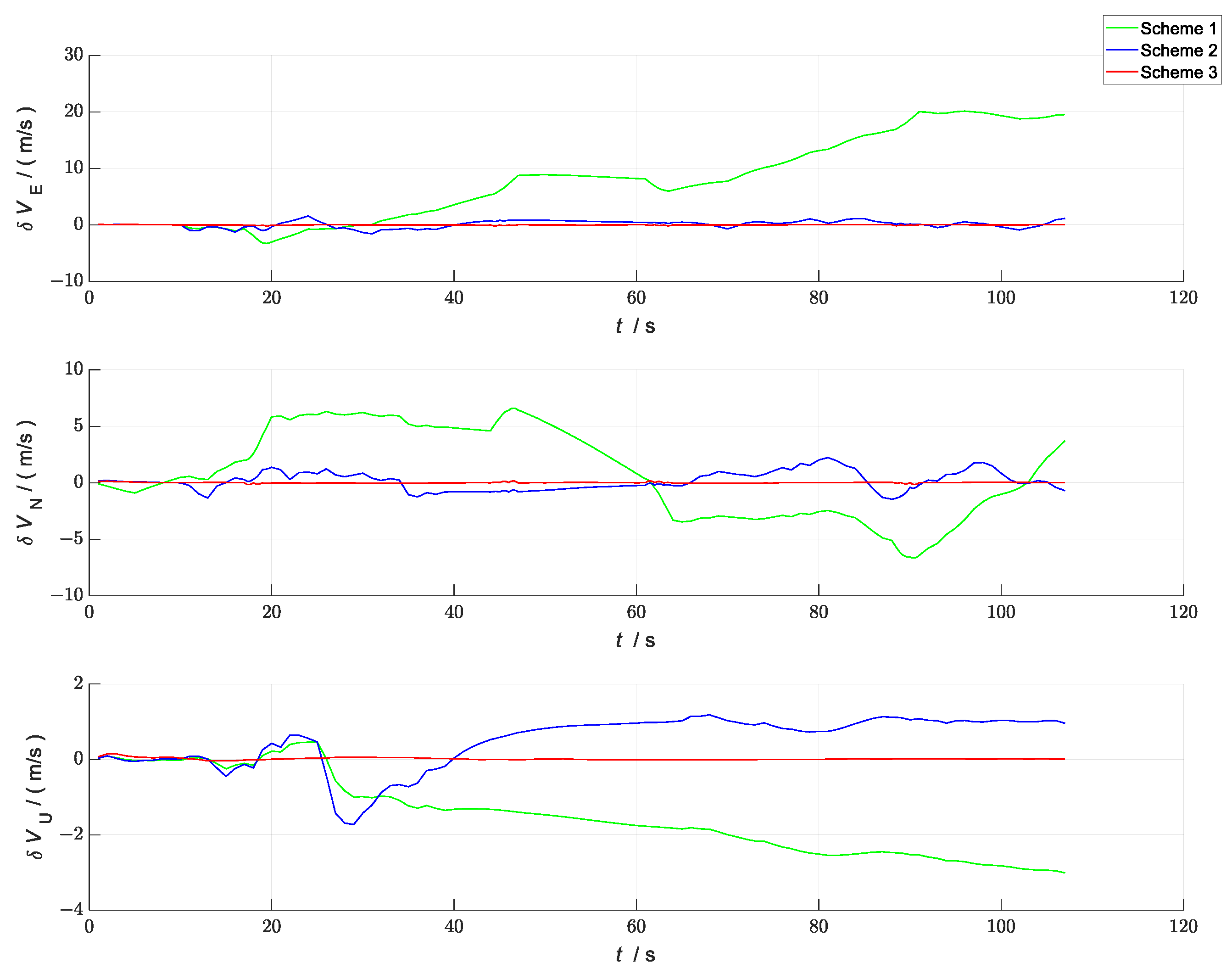
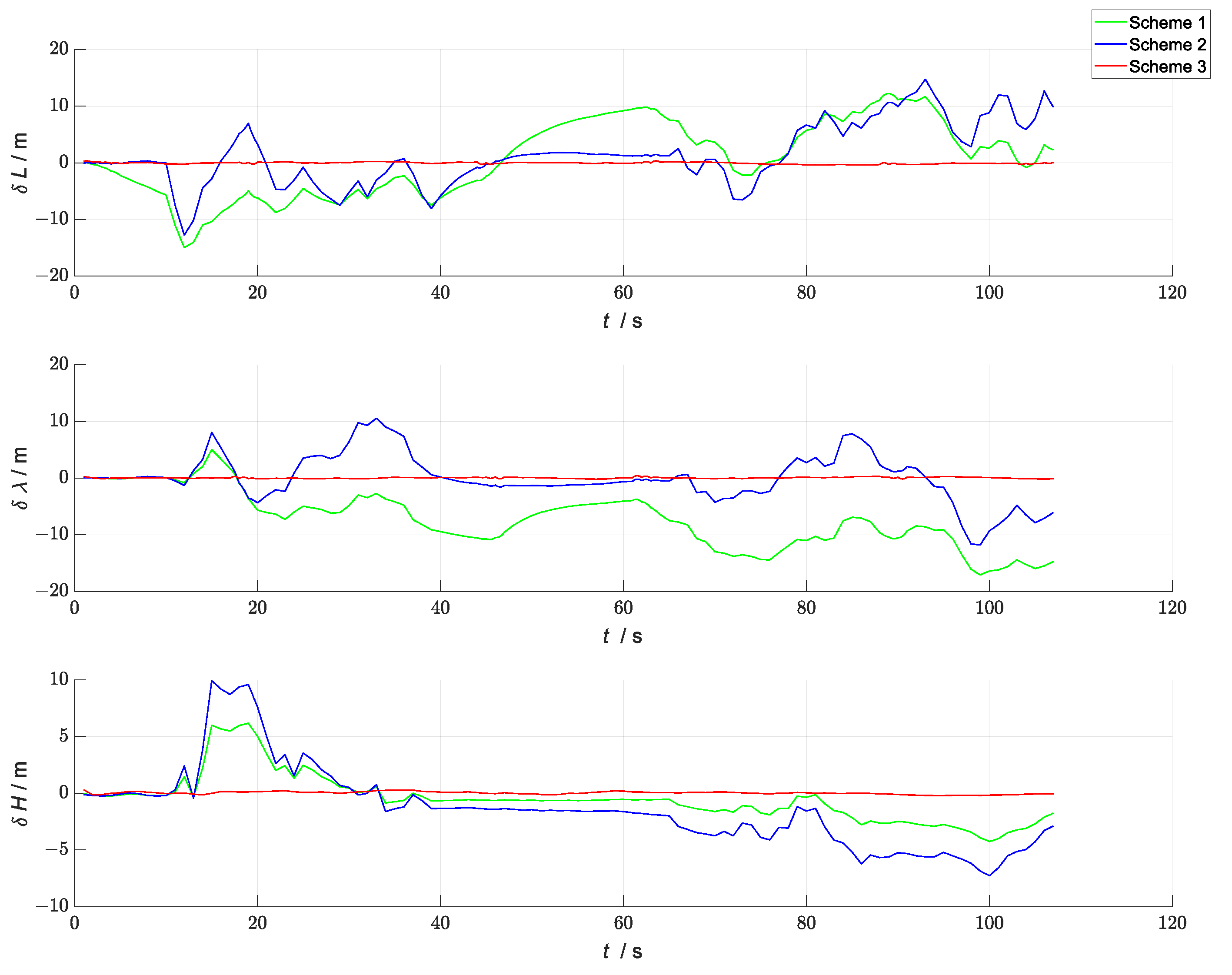
5.2. Analysis of Complex-Environment-Simulation Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, J.; Zhao, Z.; Hu, N.; Huang, G.; Gong, X.; Yang, S. Summary and Prospect of Indoor High-Precision Positioning Technology. Geomat. Inf. Sci. Wuhan Univ. 2022, 47, 997–1008. [Google Scholar]
- Girma, A.; Bahadori, N.; Sarkar, M. IoT-Enabled Autonomous System Collaboration for Disaster-Area Management. IEEE CAA J. Autom. Sin. 2020, 7, 1249–1262. [Google Scholar] [CrossRef]
- Dinelli, C.; Racette, J.; Escarcega, M.; Lotero, S.; Gordon, J.; Montoya, J.; Dunaway, C.; Androulakis, V.; Khaniani, H.; Shao, S.; et al. Configurations and Applications of Multi-Agent Hybrid Drone/Unmanned Ground Vehicle for Underground Environments: A Review. Drones 2023, 7, 136. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, H.; Chen, P.; Zhang, X.; Li, Q. Overview of the application of neural networks in the motion control of unmanned vehicles. Chin. J. Eng. 2022, 44, 235–243. [Google Scholar]
- Qi, Y.; He, B.; Pan, S.; Mu, W.; Zhang, Y.; Xu, Y. Path Processing Method for Wheeled Mobile Robots Based on Rearrangement and Optimization. Robot 2023, 45, 70–77. [Google Scholar]
- Yang, Y. Concepts of Comprehensive PNT and Related Key Technologies. Acta Geod. Cartogr. Sin. 2016, 45, 505–510. [Google Scholar]
- Zhang, K.; Shen, C.; Zhou, Q. A combined GPS UWB and MARG locationing algorithm for indoor and outdoor mixed scenario. Clust. Comput. 2019, 22, 5965–5974. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.; Chen, X. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Wang, Y.; Bi, J. Indoor Positioning Method Using WiFi RTT Based on LOS Identification and Range Calibration. ISPRS Int. J. Geo-Inf. 2020, 9, 627. [Google Scholar] [CrossRef]
- Xuan, L.; Shen, Y.; Gan, T.; Zhang, C.; Zhang, Y. Research on indoor positioning method of smart trash can based on RFID. In Proceedings of the IEEE 8th International Conference on Computer and Communications (ICCC), Chengdu, China, 9–12 December 2022; pp. 505–510. [Google Scholar]
- Cabrera-Goyes, E.; Ordóñez-Camacho, D. Towards a bluetooth indoor positioning system with android consumer devices. In Proceedings of the International Conference on Information Systems and Computer Science (INCISCOS), Quito, Ecuador, 23–25 November 2017; pp. 56–59. [Google Scholar]
- Liu, C.; Cao, Y.; Sun, C.; Shen, W.; Li, X.; Gao, L. An outlier-aware method for UWB indoor positioning in NLoS situations. In Proceedings of the IEEE 25th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Hangzhou, China, 4–6 May 2022; pp. 1504–1509. [Google Scholar]
- Kealy, A.; Alam, N.; Toth, C.; Moore, T.; Gikas, V.; Danezis, C.; Roberts, G.W.; Retscher, G.; Hasnur-Rabiain, A.; Grejner-Brzezinska, D.A.; et al. Collaborative navigation with ground vehicles and personal navigators. In Proceedings of the International sConference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar]
- Jiang, W.; Cao, Z.; Cai, B.; Li, B.; Wang, J. Indoor and Outdoor Seamless Positioning Method Using UWB Enhanced Multi-Sensor Tightly-Coupled Integration. IEEE Trans. Veh. Technol. 2021, 70, 10633–10645. [Google Scholar] [CrossRef]
- You, C.; Peng, L.; Wang, J.; Wen, C.; Chen, R. VLC and PDR Fusion Positioning by Incorporating High-Precision Indoor Map. J. Geo-Inf. Sci. 2019, 21, 1402–1410. [Google Scholar]
- Duan, L. Research on Multi-Source and Heterogeneous Fusion Positioning Method; School of Information and Communication: Tokyo, Japan, 2018. [Google Scholar]
- Zhang, J.; Chen, H.; Chen, Y. A Multi-sensor Fusion Positioning Algorithm Based on Federated Kalman Filter. Missiles Space Veh. 2018, 90–98. [Google Scholar]
- Yan, G.; Deng, Y. Review on practical Kalman filtering techniques in traditional integrated navigation system. Navig. Position. Timing 2020, 7, 50–64. [Google Scholar]
- Yuan, G.; Dai, C.; Liu, F. Further Discussion on the Application Feasibility of Federated Kalman Filter in Integrated Navigation. Navig. Position. Timing 2022, 9, 1–6. [Google Scholar]
- Yang, Y. Kinematic and static filtering for multi-sensor navigation systems. Geomat. Inf. Sci. Wuhan Univ. 2003, 28, 386–388+396. [Google Scholar]
- Shi, J.; Qiu, L.; Wang, X.; Xue, X.; Hou, J. Research on integrated navigation technology based on the dynamic, static filtering algorithm. In Proceedings of the China Satellite Navigation Conference (CSNC 2015), Xi’an, China, 13–15 May 2015. [Google Scholar]
- Wang, Y.; Zheng, W.; An, X.; Sun, S. Pulsar/CNS integrated navigation method based on improved kinematic and static filter for deep space explorer. Chin. Space Sci. Technol. 2013, 33, 22–28. [Google Scholar]
- Lu, K.; Wang, C.; Wang, Y. Attitude estimation algorithm based on error state Kalman filter. In Proceedings of the International Conference on Autonomous Unmanned Systems (ICAUS 2022), Xi’an, China, 23–25 September 2022. [Google Scholar]
- Dai, J.; Hao, X.; Liu, S.; Ren, Z. Research on UAV Robust Adaptive Positioning Algorithm Based on IMU/GNSS/VO in Complex Scenes. Sensors 2022, 22, 2832. [Google Scholar] [CrossRef]
- Farkas, M.; Vanek, B.; Rozsa, S. Small UAV’s position and attitude estimation using tightly coupled multi baseline multi constellation GNSS and inertial sensor fusion. In Proceedings of the IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Turin, Italy, 19–21 June 2019; pp. 176–181. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Parameter | Value | |
|---|---|---|---|
| IMU | Gyro error | bias | |
| random walk | |||
| Accelerometer error | bias | ||
| random walk | |||
| Frequency | |||
| GNSS | Location | ||
| Speed | |||
| Frequency | |||
| UWB | Location | ||
| Speed | |||
| Frequency | |||
| RMSE | Pitch (″) | Yaw (″) | Roll (′) | VX (m/s) | VY (m/s) | VZ (m/s) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|---|---|
| Loosely coupled GNSS/INS | 5.72 | 6.63 | 0.19 | 0.08 | 0.07 | 0.06 | 0.71 | 0.54 | 0.45 |
| Loosely coupled UWB/INS | 5.70 | 6.56 | 0.19 | 0.05 | 0.05 | 0.07 | 0.41 | 0.56 | 0.70 |
| Kinematic and static filtering of ESKF based on INS/GNSS/UWB | 5.73 | 6.62 | 0.19 | 0.05 | 0.04 | 0.07 | 0.40 | 0.46 | 0.51 |
| MAE | Pitch (″) | Yaw (″) | Roll (′) | VX (m/s) | VY (m/s) | VZ (m/s) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|---|---|
| Loosely coupled GNSS/INS | 5.70 | 6.62 | 0.19 | 0.04 | 0.05 | 0.04 | 0.59 | 0.42 | 0.38 |
| Loosely coupled UWB/INS | 5.68 | 6.55 | 0.19 | 0.04 | 0.03 | 0.05 | 0.34 | 0.47 | 0.63 |
| Kinematic and static filtering of ESKF based on INS/GNSS/UWB | 5.71 | 6.60 | 0.19 | 0.03 | 0.03 | 0.05 | 0.32 | 0.36 | 0.38 |
| Sensor Type | Parameter | Value | ||||
|---|---|---|---|---|---|---|
| Scene 1 | Scene 2 | Scene 3 | Scene 4 | |||
| IMU | Gyro error | bias | ||||
| random walk | ||||||
| Accelerometer error | bias | |||||
| random walk | ||||||
| Frequency | ||||||
| GNSS | Location | |||||
| Speed | ||||||
| Frequency | ||||||
| UWB | Location | |||||
| Speed | ||||||
| Frequency | ||||||
| RMSE | Pitch (″) | Yaw (″) | Roll (′) | VX (m/s) | VY (m/s) | VZ (m/s) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|---|---|
| Scene 1 | 4.62 | 7.60 | 0.18 | 0.03 | 0.03 | 0.03 | 0.12 | 0.16 | 0.19 |
| Scene 2 | 4.71 | 6.37 | 0.18 | 0.04 | 0.05 | 0.06 | 0.26 | 0.23 | 0.23 |
| Scene 3 | 13.25 | 36.12 | 0.36 | 0.04 | 0.04 | 0.02 | 0.17 | 0.15 | 0.11 |
| Scene 4 | 12.35 | 30.93 | 0.50 | 0.11 | 0.14 | 0.10 | 1.09 | 0.83 | 0.73 |
| MAE | Pitch (″) | Yaw (″) | Roll (′) | VX (m/s) | VY (m/s) | VZ (m/s) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|---|---|
| Scene 1 | 4.59 | 7.53 | 0.18 | 0.02 | 0.02 | 0.02 | 0.10 | 0.13 | 0.16 |
| Scene 2 | 4.69 | 6.33 | 0.18 | 0.02 | 0.03 | 0.03 | 0.21 | 0.19 | 0.18 |
| Scene 3 | 10.29 | 34.86 | 0.27 | 0.02 | 0.02 | 0.01 | 0.13 | 0.12 | 0.09 |
| Scene 4 | 9.89 | 24.18 | 0.42 | 0.09 | 0.10 | 0.07 | 0.95 | 0.66 | 0.54 |
| RMSE | Pitch (″) | Yaw (″) | Roll (′) | VX (m/s) | VY (m/s) | VZ (m/s) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|---|---|
| Scheme 1 | 833.72 | 740.69 | 221.99 | 11.46 | 3.91 | 1.23 | 5.49 | 11.86 | 1.72 |
| Scheme 2 | 16.31 | 34.98 | 0.65 | 0.62 | 0.76 | 0.48 | 3.73 | 3.46 | 2.66 |
| Scheme 3 | 30.36 | 38.64 | 0.86 | 0.04 | 0.04 | 0.02 | 0.18 | 0.25 | 0.13 |
| MAE | Pitch (″) | Yaw (″) | Roll (′) | VX (m/s) | VY (m/s) | VZ (m/s) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|---|---|---|---|
| Scheme 1 | 516.93 | 449.10 | 180.65 | 8.88 | 3.39 | 1.03 | 4.34 | 9.89 | 1.14 |
| Scheme 2 | 13.54 | 33.02 | 0.56 | 0.46 | 0.56 | 0.27 | 2.44 | 2.37 | 1.56 |
| Scheme 3 | 25.29 | 30.57 | 0.71 | 0.02 | 0.02 | 0.01 | 0.14 | 0.18 | 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Z.; Liu, S.; Dai, J.; Lv, Y.; Fan, Y. Research on Kinematic and Static Filtering of the ESKF Based on INS/GNSS/UWB. Sensors 2023, 23, 4735. https://doi.org/10.3390/s23104735
Ren Z, Liu S, Dai J, Lv Y, Fan Y. Research on Kinematic and Static Filtering of the ESKF Based on INS/GNSS/UWB. Sensors. 2023; 23(10):4735. https://doi.org/10.3390/s23104735
Chicago/Turabian StyleRen, Zongbin, Songlin Liu, Jun Dai, Yunzhu Lv, and Yun Fan. 2023. "Research on Kinematic and Static Filtering of the ESKF Based on INS/GNSS/UWB" Sensors 23, no. 10: 4735. https://doi.org/10.3390/s23104735