

Deep Learning Methods for Space Situational Awareness in Mega-Constellations Satellite-Based Internet of Things Networks

Abstract
:1. Introduction
2. Related Works
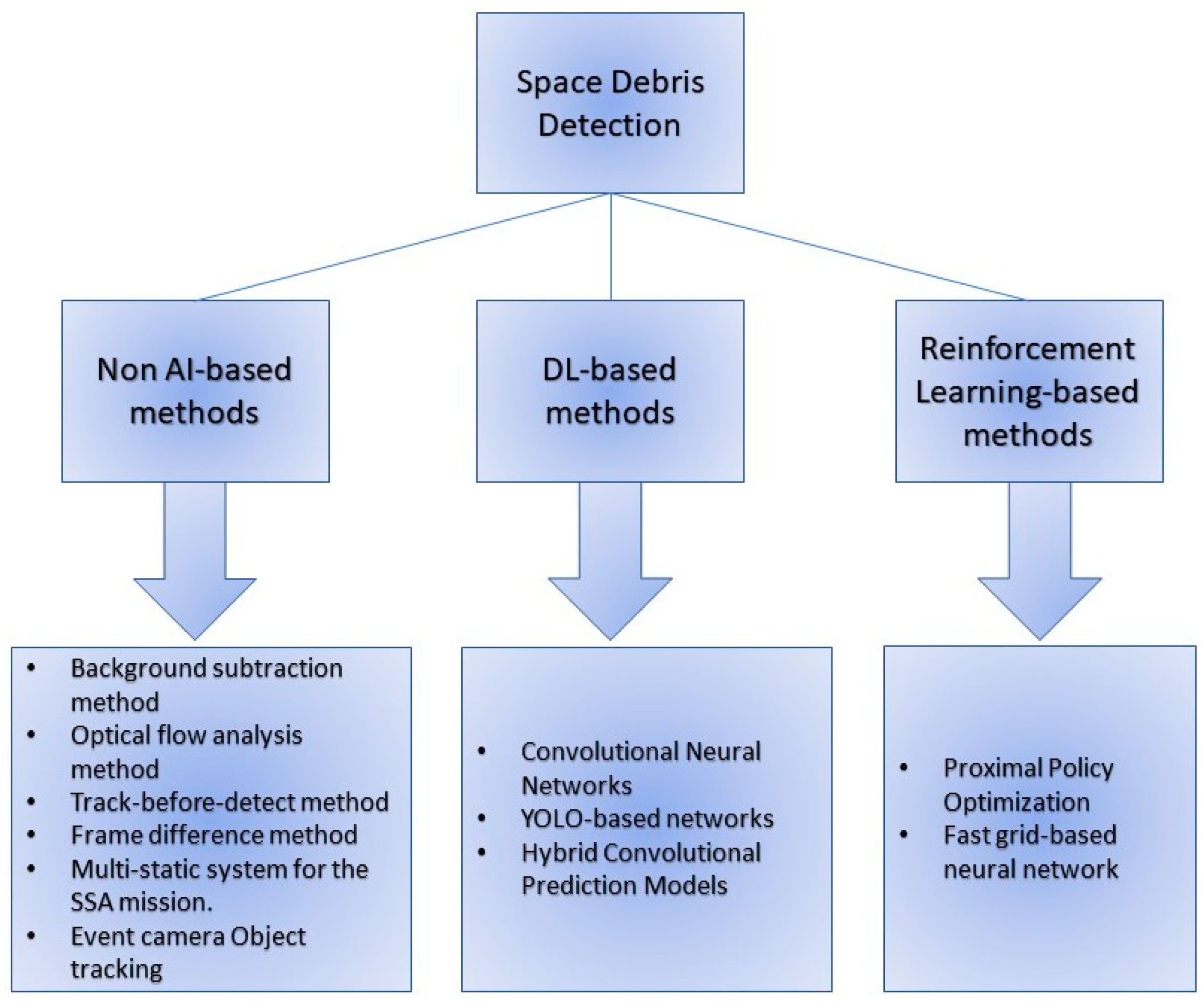
2.1. Non-AI-Based Methods
- Optical flow analysis method [86] is a technique used to describe the movement of objects within a sequence of images that have a small-time gap between them, such as video frames. Optical flow calculates a motion vector for the points within the images and provides an estimate of where the points might be in the next image.
- Track-before-detect methods [87,88] is a concept where a target is tracked before it is detected. Usually, target detection is performed by means of thresholding of the input signal, and the output is passed to a tracker. In this paradigm, sensor data on a provisional target are integrated over time, and the target is detected without the use of any threshold. This approach is able to track targets even with low SNRs (signal-to-noise ratios).
- High temporal resolution: unlike conventional cameras, event cameras can catch extremely fast motion without experiencing motion blur
- Low Latency: there is no need to wait for the frame’s overall exposure time because each pixel operates independently. An event is notified as soon as the change is discovered.
- Low Bandwidth: by broadcasting brightness changes, event cameras eliminate duplicate data.
- Low Power: in event cameras, power is only utilized to process the shifting pixels.
- Despite the advantages listed above, there are also significant disadvantages:
- High Noise: because of how the sensors are built, event cameras are particularly susceptible to background activity noise brought on by transient noise and leakage currents from semiconductor PN junctions.
- Large Pixel Size: compared to a regular camera, the modern event camera has larger pixels. The event camera’s resolution is relatively low due to the high pixel size.
- Low Fill Factor: the fill factor of event cameras is usually small, which means that a lot of pixel area is useless.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Name | Description | Reference Number |
|---|---|---|
| Background subtraction method | This paper introduces background subtraction methods and reports a comparison of the most promising cutting-edge algorithms. | [83] |
| This work provides a specific perspective view on background subtraction for detecting moving objects, as a building block of many computer vision applications, being the first relevant step for subsequent activity recognition, classification and analysis. | [84] | |
| This article introduces a background subtraction algorithm for detecting fast moving objects. In particular, the algorithm proved effective in detecting change in global illumination, static foreground objects, camouflaged objects, ghosts and dynamic background compared to seven other cutting-edge methods. | [85] | |
| Optical flow analysis method | This article presents an experiment to verify the accuracy of the optical flow method (i.e., the apparent movement of individual pixels in the image plane). The accuracy of the technique is evaluated for different amplitudes of sub-pixel vibration displacement. | [86] |
| Track-before-detect method | This paper addresses the detection and monitoring of weak and maneuvering targets using the MF-TBD (Multi-Frame Track-Before-Detect) method. | [87] |
| This work considers the underwater tracking of an unknown and time-varying number of targets, for example acoustic emitters, using passive array sonar systems | [88] | |
| Frame difference method | This article introduces the problem of moving target detection in video sequences. An improved frame difference target detection algorithm is proposed on the basis of the self-updating medium background model. | [89] |
| A motion detection application with the frame difference method on a surveillance cameras CCTV (Close-Circuit Television) is discussed. | [90] | |
| Multi-static system for the SSA mission. | The main objective of this article is to evaluate the performance of a multi-static system for the SSA mission. In addition, a simulation tool was developed to test the performance in different scenarios. | [91] |
| Event camera Object tracking | This article first introduces the basic principles of the event camera, then analyzes its advantages and disadvantages. | [92] |
2.2. DL-Based Methods
2.2.1. CNN-Based Methods
2.2.2. YOLO Networks
2.2.3. Hybrid Convolutional Prediction Models
| Method Name | Description | Reference Number |
|---|---|---|
| Convolutional Neural Networks | This paper shows that DL architectures are suitable for modeling complex behaviors of conventional multimodal datasets. It is demonstrated that DL models have the ability to work on any data, be it structured, unstructured or semi-structured | [96] |
| The authors propose a method for detecting the salience of space debris based on a fully convolutional network (FCN) for the space surveillance platform. | [97] | |
| A novel U-Net deep neural network approach is exploited for image segmentation for real-time extraction of tracklets from optical acquisitions | [98] | |
| The use of hierarchical MCNNT (Modified Convolutional Neural Networks Techniques) improves the performance of CNN classification, reaching a 96% accuracy against existing support vector machine (SVM) models. | [99] | |
| PSnet is a perspective sensitive network to detect objects from different perspectives (i.e., angles of view). The features are mapped to the preset multi-perspective spaces to obtain the specific semantic feature of the object decoupled from the angle of view. | [100] | |
| An end-to-end spacecraft image segmentation network using the DeepLabv3 + semantic segmentation network as the basic framework is proposed here. Then, a multiscale neural network based on sparse convolutions (called SISnet) is developed. | [101] | |
| Conventional classification algorithms, such as k-nearest neighbor (k-NN), are implemented and compared in terms of accuracy with the proposed DNN-based classification algorithms, including the popular CNN and the recurrent neural network. | [31] | |
| YOLOv3-based networks | A simple two-step framework for recognizing moving objects is proposed. In the first step, regions of interest (ROIs) are found in a video frame. In the second step, a CNN is used to rank the detected ROIs based on a set of predefined criteria. | [103] |
| YOLOv3-Tiny optimizes the YOLOv3-based network structure and reduces the output by one scale. Human images are used to train YOLOv3-Tiny so that they can recognize humans as tracking targets. Then, YOLOv3-Tiny analyzes the images collected by the UAV for target tracking. | [105] | |
| Hybrid convolutional prediction models | A new model for zero-click action recognition is here studied, which jointly captures the object relations of a static frame and models the temporal motion patterns of adjacent frames. | [106] |
| This work develops an innovative framework that integrates ground-based and satellite observations through DL to improve photovoltaic production forecasts. | [107] |
2.3. Reinforcement Learning-Based Methods
| Method Name | Description | Reference Number |
|---|---|---|
| Deep Reinforcement Learning | A controllable ground-based telescope observing satellites in LEO is simulated in a reinforcement learning environment. | [109] |
| The Proximal Policy Optimization (PPO) method, a fuzzy neural network, and Deep Reinforcement Learning (DRL) were used to demonstrate a proposal for active object tracking of FFSM systems (FNN). | [110] | |
| For the SSA sensor tasking problem, four DRL agents are trained using population-based training and proximal policy optimization. | [79] | |
| This paper provides the first results to solve the sensor-tasking and sensor-management (SM) problem for Space Situational Awareness (SSA) using the asynchronous advantage Actor-Critical Method (A3C). | [111] | |
| A fast detection technique of space debris with grid-based learning is proposed. The image is divided into 14 × 14 grids, then the fast grid-based neural network (FGBNN) is used to pinpoint the location of the spatial debris in the grids. | [112] |
3. Case Study
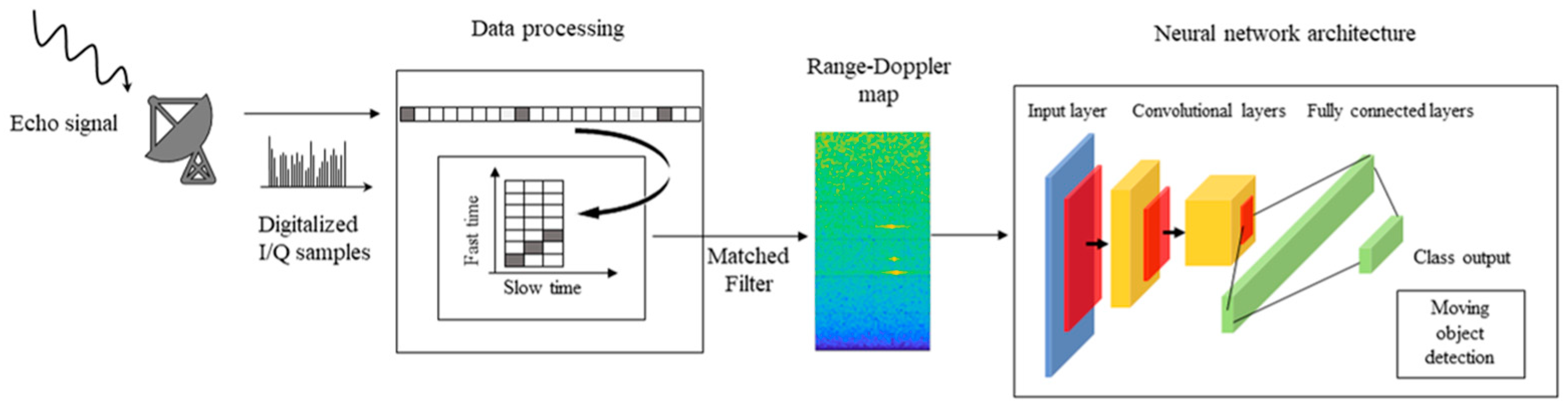
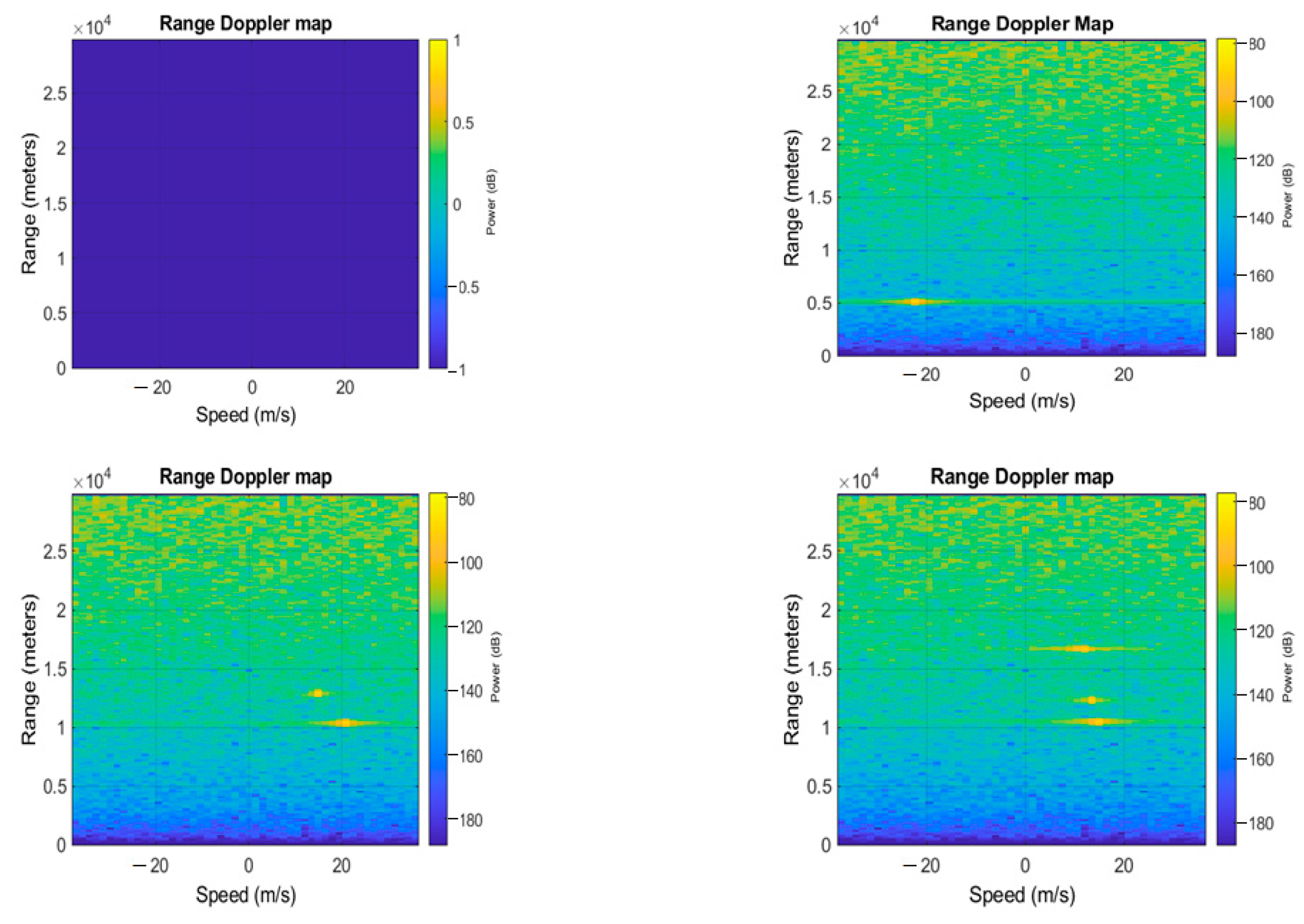
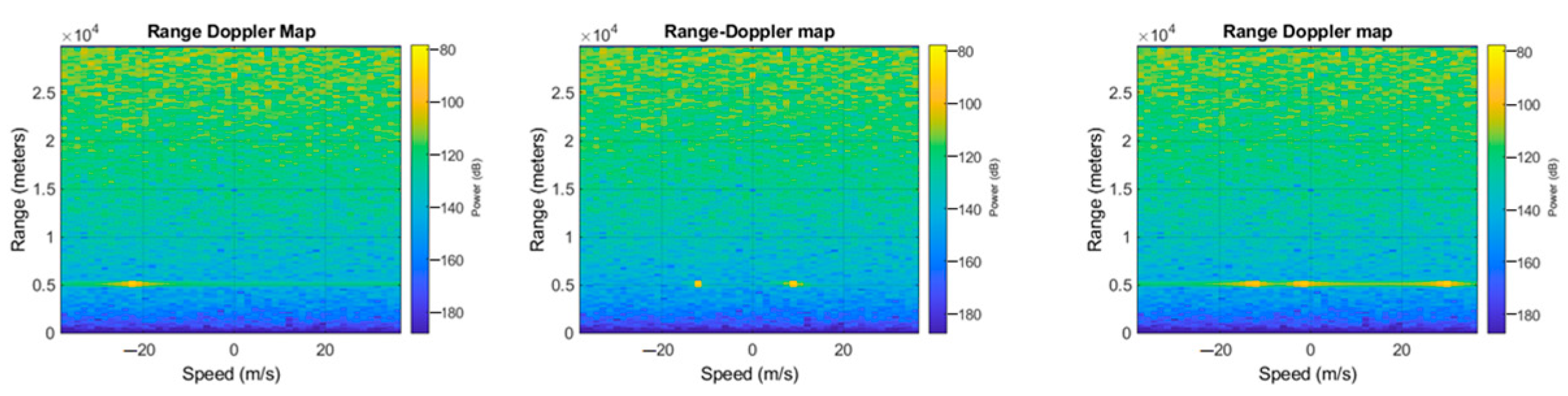
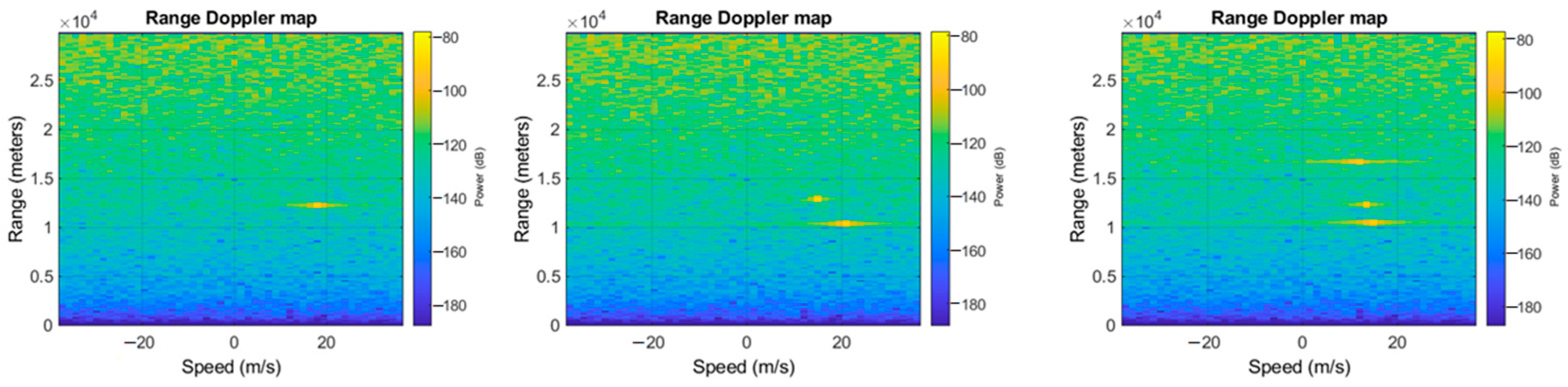
3.1. Radar Processing
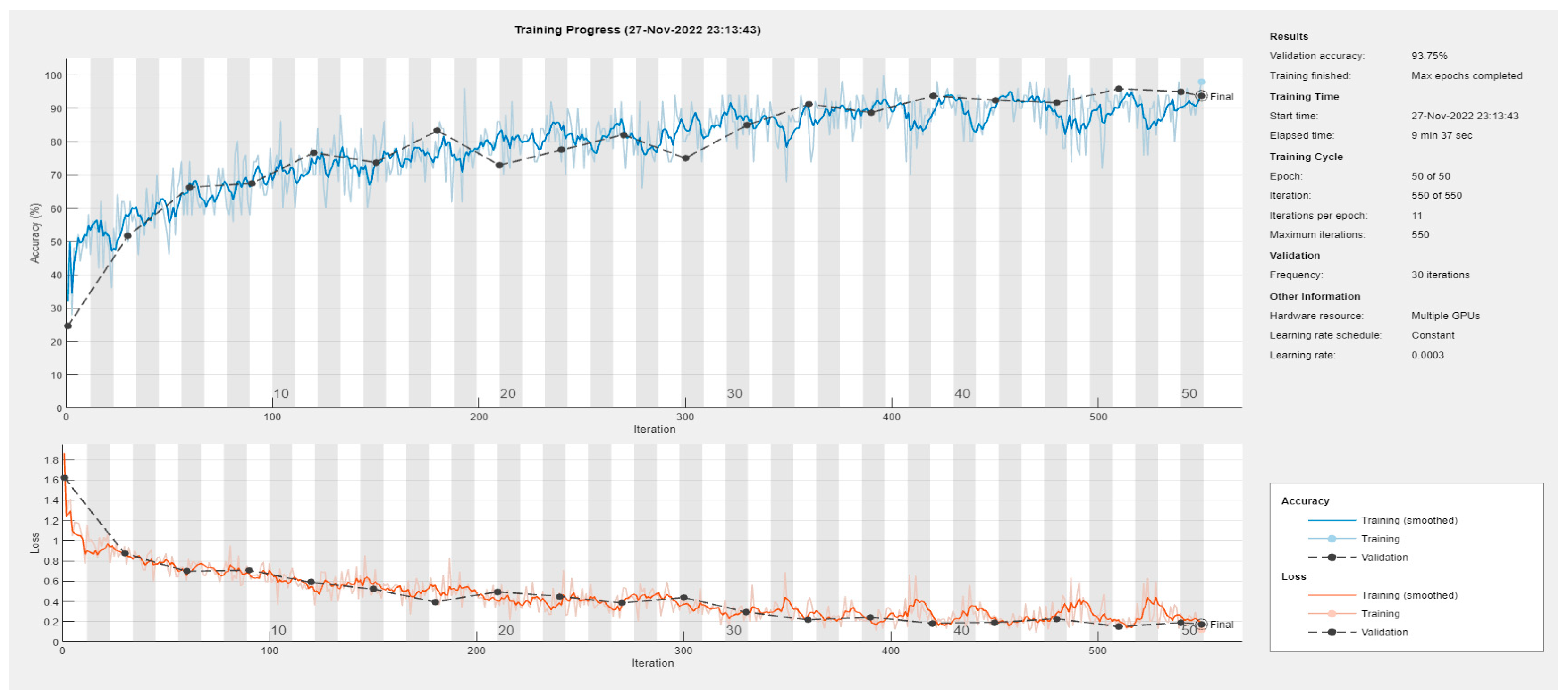
3.2. Neural Network Frameworks
- SqueezeNet is a very light architecture which, nevertheless, achieves outstanding performance in computer vision tasks. The basic idea of the SqueezeNet network is to create a small neural network with few parameters, which can easily adapt to portable devices, thus having a lower computational burden, lower memory demand, and reduced inference time. It is made up of 18 layers. The compression layer consists of 1-by-1 convolutions, which combine all input data channels into a single channel. This procedure reduces the number of inputs for the next level. Data reduction is obtained also by using max-pooling layers, which perform a pooling operation that calculates and retains the maximum value of each patch inside each feature map. In a SqueezeNet, the last learnable layer is the final convolutional layer, unlike in most networks, where the last layer with learnable weights is generally a fully connected layer.
- VGG-16 is a sixteen-layer deep neural network with about 138 million parameters. This implies that it takes a long time to be trained and to make an inference. It also occupies a significant amount of memory (roughly 533 MB). Despite this, it has been used in several image classification problems, and in terms of performance, it provided the best result with a test error of about 7.0%. [114,115]. The main design idea was to increase the depth by using smaller (3 × 3) multiple convolutional filters than those of previous networks. VGG-16 is composed of a stack of 13 convolutional layers followed by three fully connected layers. Each convolutional block consists of multiple convolutional layers, each with different 3 × 3 filter kernels. As the depth increases, the number of filters in the levels grows, from 64 up to 512, in order to extract increasingly detailed feature maps from each block. The convolutional layers are followed by a rectified linear unit activation layer, and each block ends with a maximum pooling layer, with a 2 × 2 sliding filter with step 2. At the end of the network, there are three fully connected layers: the first two layers have 4096 nodes each; the third performs the 1000-way ILSVRC classification and, therefore, contains 1000 output nodes. This final layer comes with a soft-max activation function for classification. Since VGG-16 is computationally demanding and the output layer does not match our case study, we customized it by modifying the last layer. We set the number of output nodes equal to the number of classes that we have defined in our use case (4, as we will describe later in the next section). As a final step, we froze the first ten layers, and we performed new training to learn new network weights for the last layers.
- The AlexNet architecture consists of five layers with a combination of max pooling, followed by three fully connected layers [116]. It uses rectified linear units instead of a hyperbolic tangent function. The advantage is twofold: it is faster to compute, especially during network training, and it mitigates the problem of vanishing gradients [117]. An interesting property of this network is that it allows parallel-GPU training by placing half of the model neurons on one GPU and the other half on the second one. This allows us to train larger models or to reduce training time. Moreover, dropout layers are used to avoid overfitting. This technique works by randomly firing a set of neurons within the first two fully connected layers during the whole training. The price to pay is that it increases the training time required for model convergence. AlexNet demonstrated significantly higher performance by achieving high accuracy on very challenging datasets, and it can be credited with bringing deep learning to other fields, such as natural language processing and medical image analysis [118].
- GoogLeNet, developed by Google, was responsible for creating a new state of the art for classification and detection tasks in the ILSVRC. It also has been used for other computer vision activities, such as face detection and recognition, or in adversarial training. GoogLeNet’s architecture is 22 levels deep, with 27 pool levels included. There are nine starter modules stacked linearly. The ends of the startup modules are connected to the global average pooling level. Since neural networks are time-consuming and expensive to train, the number of input channels is limited. The first level of convolutions uses a filter size of 7 × 7, which is relatively large compared to other kernels within the network. The main purpose of this layer is to immediately reduce the input image without losing spatial information. To address the overfitting problem, the GoogLeNet architecture was created with the idea of having multi-dimensional filters that can operate on the same level. With this idea, the network becomes wider rather than deeper. For ILSVRC 2014, GoogLeNet ranked first with an error rate of 6.67% [119].
4. Results and Discussions
5. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronym | Explanation |
| A3C | Actor-Critical Method |
| AI | Artificial Intelligence |
| AIOT | Artificial Intelligence of Things |
| AMIGO | Adaptive Markov Inference Game Optimization |
| ANN | Artificial Neural Network |
| AOT | Active Object Tracking |
| ASPP | A parallel Spatial Pyramid Pooling |
| CCTV | Close-Circuit Television |
| CNN | Convolutional Neural Network |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| DRL | Deep Reinforcement Learning |
| FC | Fully Connected |
| FCC | Federal Communications Commission |
| FCN | Fully Convolutional Network |
| FFSM | Floating Space Manipulators |
| FFT | Fast Fourier Transform |
| FGBNN | Fast Grid-Based Neural Network |
| FNN | Fuzzy Neural Network |
| FOV | Field of View |
| ILSVRC | ImageNet Large Scale Visual Recognition Challenge |
| IOT | Internet of Things |
| ISS | International Space Station |
| K-NN | k-Nearest Neighbor |
| K-NN-DTW | k-Nearest Neighbor combined with Dynamic Time Warping |
| LEO | Low Earth Orbit |
| LSTM | Long-Short Term Memory |
| MCNNT | Modified Convolutional Neural Networks Technique |
| MEO | Medium Earth Orbit |
| MF-TBD | Multi-Frame Track-Before-Detect |
| ML | Machine Learning |
| PPO | Proximal Policy Optimization |
| PRF | Pulse Repetition Frequency |
| RCS | Radar Cross Section |
| RELU | Rectified Linear Unit |
| RL | Reinforcement Learning |
| RNN | Recurrent Neural Network |
| ROI | Region of Interest |
| SDA | Space Domain Awareness |
| SGDM | Stochastic Gradient Descent with Momentum |
| SIOT | Satellite Internet of Things |
| SM | Sensor Management |
| SNR | Signal to Noise Ratio |
| SSA | Space Situational Awareness |
| STM | Space Traffic Management |
| SVM | Support Vector Machine |
| TDNN | Time-Delay Neural Network |
| UAV | Unmanned Aerial Vehicles |
References
- Davenport, T.; Kalakota, R. The potential for artificial intelligence in healthcare. Future Healthc. J. 2019, 6, 94–98. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pallathadka, H.; Ramirez-Asis, E.H.; Loli-Poma, T.P.; Kaliyaperumal, K.; Ventayen, R.J.M.; Naved, M. Applications of artificial intelligence in business management, e-commerce and finance. Mater. Today Proc. 2021; in press. [Google Scholar] [CrossRef]
- Jha, K.; Doshi, A.; Patel, P.; Shah, M. A comprehensive review on automation in agriculture using artificial intelligence. Artif. Intell. Agric. 2019, 2, 1–12. [Google Scholar] [CrossRef]
- Özgür, L.; Akram, V.K.; Challenger, M.; Dağdeviren, O. An IoT based smart thermostat. In Proceedings of the 2018 5th International Conference on Electrical and Electronic Engineering (ICEEE), Istanbul, Turkey, 3–5 May 2018; pp. 252–256. [Google Scholar] [CrossRef]
- Taryudi; Adriano, D.B.; Budi, W.A.C. Iot-based Integrated Home Security and Monitoring System. J. Phys. Conf. Ser. 2018, 1140, 012006. [Google Scholar] [CrossRef]
- Padmaja, B.; Rao, P.V.N.; Bala, M.M.; Patro, E.K.R. A Novel Design of Autonomous Cars using IoT and Visual Features. In Proceedings of the 2018 2nd International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud), Palladam, India, 30–31 August 2018; pp. 18–21. [Google Scholar] [CrossRef]
- Haroun, A.; Le, X.; Gao, S.; Dong, B.; He, T.; Zhang, Z.; Wen, F.; Xu, S.; Lee, C. Progress in micro/nano sensors and nanoenergy for future AIoT-based smart home applications. Nano Express 2021, 2, 022005. [Google Scholar] [CrossRef]
- Xiong, Z.; Cai, Z.; Takabi, D.; Li, W. Privacy Threat and Defense for Federated Learning with Non-i.i.d. Data in AIoT. IEEE Trans. Ind. Inform. 2022, 18, 1310–1321. [Google Scholar] [CrossRef]
- Kristen, E.; Kloibhofer, R.; Díaz, V.H.; Castillejo, P. Security Assessment of Agriculture IoT (AIoT) Applications. Appl. Sci. 2021, 11, 5841. [Google Scholar] [CrossRef]
- Wazid, M.; Das, A.K.; Park, Y. Blockchain-Envisioned Secure Authentication Approach in AIoT: Applications, Challenges, and Future Research. Wirel. Commun. Mob. Comput. 2021, 2021, 3866006. [Google Scholar] [CrossRef]
- Castillo-Atoche, A.; Caamal-Herrera, K.; Atoche-Enseñat, R.; Estrada-López, J.J.; Vázquez-Castillo, J.; Castillo-Atoche, A.C.; Palma-Marrufo, O.; Espinoza-Ruiz, A. Energy Efficient Framework for a AIoT Cardiac Arrhythmia Detection System Wearable during Sport. Appl. Sci. 2022, 12, 2716. [Google Scholar] [CrossRef]
- Christos, S.C.; Christos, G. Data-centric operations in the oil & gas industry by the use of 5G mobile networks and industrial Internet of Things (IIoT). In Proceedings of the 13th International Conference on Digital Telecommunications, Athens, Greece, 22–26 April 2018; p. 16. [Google Scholar]
- Lian, Z.; Dong, Y.; Yin, L.; Wang, Y. An Economic Evaluation Method for LEO Satellite Constellation Considering Revenue and Efficiency. In Proceedings of the 2022 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Foshan, China, 11–13 August 2022; pp. 488–493. [Google Scholar] [CrossRef]
- Darwish, T.; Kurt, G.K.; Yanikomeroglu, H.; Lamontagne, G.; Bellemare, M. Location Management in Internet Protocol-Based Future LEO Satellite Networks: A Review. IEEE Open J. Commun. Soc. 2022, 3, 1035–1062. [Google Scholar] [CrossRef]
- Ghafar, A.I.A.; Vazquez-Castro, A.; Khedr, M.E. Resilience Analysis of Multichord Peer to Peer IoT Satellite Networks. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 7–10 February 2021; pp. 220–225. [Google Scholar]
- Zhou, D.; Sheng, M.; Wu, J.; Li, J.; Han, Z. Gateway Placement in Integrated Satellite–Terrestrial Networks: Supporting Communications and Internet of Remote Things. IEEE Internet Things J. 2022, 9, 4421–4434. [Google Scholar] [CrossRef]
- Sanctis, M.D.; Cianca, E.; Araniti, G.; Bisio, I.; Prasad, R. Satellite communications supporting internet of remote things. IEEE Internet Things J. 2016, 3, 113–123. [Google Scholar] [CrossRef]
- Hainaut, O.R.; Williams, A.P. Impact of satellite constellations on astronomical observations with ESO telescopes in the visible and infrared domains. Astron. Astrophys. 2020, 636, A121. [Google Scholar] [CrossRef] [Green Version]
- McDowell, J.C. The low earth orbit satellite population and impacts of the SpaceX Starlink constellation. Astrophys. J. Lett. 2020, 892, L36. [Google Scholar] [CrossRef] [Green Version]
- Sturza, M.A.; Carretero, G.S. Mega-Constellations—A Holistic Approach to Debris Aspects. In Proceedings of the 8th European Conference on Space Debris (Virtual), Darmstadt, Germany, 20–23 April 2021. [Google Scholar]
- Lu, Y.; Shao, Q.; Yue, H.; Yang, F. A review of the space environment effects on spacecraft in different orbits. IEEE Access 2019, 7, 93473–93488. [Google Scholar] [CrossRef]
- Dominguez, M.; Faga, M.; Fountain, J.; Kennedy, P.; O’Keefe, S. Space Traffic Management: Assessment of the Feasibility, Expected Effectiveness, and Funding Implications of a Transfer of Space Traffic Management Functions; National Academy of Public Administration: Washington, DC, USA, 2020; p. 102252. [Google Scholar]
- FCC-21-48; Space Exploration Holdings, LLC Request for Modification of the Authorization for the SpaceX NGSO Satellite System. Federal Communication Commision: Washington, DC, USA, 2021.
- Kessler, D.; Cour-Palais, B. Collision frequency of artificial satellites: The creation of a debris belt. J. Geophys. Res. 1978, 83, 2637. [Google Scholar] [CrossRef]
- Liou, J.-C.; Johnson, N.L. Risks in space from orbiting debris. Science 2006, 311, 5759. [Google Scholar] [CrossRef]
- Rossi, A.; Petit, A.; McKnight, D. Short-term space safety analsyis of LEO constellations and clusters. Acta Astronaut. 2020, 175, 476–483. [Google Scholar] [CrossRef]
- Le May, S.; Gehly, S.; Carter, B.A.; Flegel, S. Space debris collision probability analysis for proposed global broadband constellations. Acta Astronaut. 2018, 151, 445–455. [Google Scholar] [CrossRef]
- Liou, J.-C.; Matney, M.; Vavrin, A.; Manis, A.; Gates, D. NASA ODPO’s large constellation STUDY. Orbit. Debris Quart. News 2018, 22, 4–7. [Google Scholar]
- Alfano, S.; Oltrogge, D.L.; Shepperd, R. LEO constellation encounter and collision rate estimation: An update. In Proceedings of the 2nd IAA Conference on Space Situational Awareness (ICSSA), Washington, DC, USA, 14–16 January 2020. [Google Scholar]
- ESA. Space Environment Statistics: Space Debris by the Numbers. 2021. Available online: https://sdup.esoc.esa.int/discosweb/statistics/ (accessed on 8 January 2021).
- Jia, B.; Pham, K.D.; Blasch, E.; Wang, Z.; Shen, D.; Chen, G. Space Object Classification Using Deep Neural Networks. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018. [Google Scholar]
- Furfaro, R.; Linares, R.; Gaylor, D.; Jah, M.; Walls, R. Resident Space Object Characterization and Behavior Understanding via Machine Learning and Ontology-based Bayesian Networks. In Proceedings of the Advanced Maui Optical and Space Surveillance Technology Conference, Maui, HI, USA, 20–23 September 2016. [Google Scholar]
- Coder, R.D.; Holzinger, M.J. Autonomy Architecture for a Raven-Class Telescope with Space Situational Awareness Applications. In Proceedings of the AAS/AIAA Spaceflight FM Conference, Kauai, HI, USA, 10–14 February 2013. [Google Scholar]
- Valasek, J. Advances in Computational Intelligence and Autonomy for Aerospace Systems; AIAA: Reston, VG, USA, 2019. [Google Scholar]
- Held, J. The Responsive Space Operations Center: The Next Generation of Mission Control. In Proceedings of the AIAA International Communications Satellite Systems Conferences (ICSSC), Queensland, Australia, 7–10 September 2015. [Google Scholar]
- Peng, H.; Bai, X. Artificial Neural Network-Based Machine Learning Approach to Improve Orbit Prediction Accuracy. J. Spacecr. Rocket. 2018, 55, 1248–1260. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Exploring Capability of Support Vector Machine for Improving Orbit Prediction Accuracy. J. Aerosp. Inf. Syst. 2018, 15, 366–381. [Google Scholar] [CrossRef]
- Linares, R.; Furfaro, R. Dynamic Sensor Tasking for Space Situational Awareness via Reinforcement Learning. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies (AMOS) Conference, Maui, HI, USA, 20–23 September 2016. [Google Scholar]
- Furfaro, R.; Linares, R.; Jah, M.; Gaylor, D. Mapping sensors measurements to the resident space objects behavior energy and state parameters space via extreme learning machines. In Proceedings of the International Astronautical Congress, Guadalajara, Mexico, 26–30 September 2016. [Google Scholar]
- Majumder, U.K.; Blasch, E.P.; Garren, D.A. Deep Learning for Radar and Communications Automatic Target Recognition; Artech House: Norwood, MA, USA, 2020. [Google Scholar]
- Jaunzemis, A.D.; Holzinger, M.J.; Jah, M.K. Evidence-Based Sensor Tasking for Space Domain Awareness; AMOS Tech: Maui, HI, USA, 2016. [Google Scholar]
- 2018. Available online: https://www.darpa.mil/news-events/2018-01-09a (accessed on 27 November 2022).
- Shen, D.; Chen, G.; Pham, K.; Blasch, E.; Tian, Z. Models in frequency hopping based proactive jamming mitigation for space communication networks. In Proceedings of the Volume 8385, Sensors and Systems for Space Applications V, Baltimore, MD, USA, 23–24 April 2012. [Google Scholar]
- Wang, G.; Pham, K.; Blasch, E.; Nguyen, T.M.; Chen, G.; Shen, D.; Jia, B.; Tian, X.; Wang, Z. Optimum design for robustness of frequency hopping system. In Proceedings of the IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 6–8 October 2014. [Google Scholar]
- Shen, D.; Chen, G.; Wang, G.; Pham, K.; Blasch, E.; Tian, Z. Network survivability oriented Markov games (NSOMG) in wideband satellite communications. In Proceedings of the IEEE/AIAA Digital Avionics Systems Conference (DASC), Colorado Springs, CO, USA, 5–9 October 2014. [Google Scholar]
- Shen, D.; Chen, G.; Cruz, J.B.; Blasch, E. A game theoretic data fusion aided path planning approach for cooperative UAV ISR. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008. [Google Scholar]
- Wei, M.; Chen, G.; Blasch, E.; Chen, H.; Cruz, J.B. Game theoretic multiple mobile sensor management under adversarial environments. In Proceedings of the International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008. [Google Scholar]
- Shen, D.; Pham, K.; Blasch, E.; Chen, H.; Chen, G. Pursuit-Evasion Orbital Game for satellite interception and collision avoidance. In Proceedings Volume 8044, Sensors and Systems for Space Applications IV; SPIE: Bellingham, WA, USA, 2011. [Google Scholar]
- Blasch, E.; Pham, K.; Shen, D. Orbital satellite pursuit-evasion game-theoretical control. In Proceedings of the 2012 11th International Conference on Information Science, Signal Processing and their Applications (ISSPA), Montreal, QC, Canada, 2–5 July 2012. [Google Scholar]
- Shen, D.; Jia, B.; Blasch, E.; Pham, K. Pursuit-Evasion Games with Information Uncertainties for Elusive Orbital Maneuver and Space Object Tracking. In Proceedings Volume 9469, Sensors and Systems for Space Applications VIII; SPIE: Bellingham, WA, USA, 2015. [Google Scholar]
- Chen, H.; Chen, G.; Blasch, E.; Pham, K. Comparison of several space target tracking filters. In Proceedings Volume 7330, Sensors and Systems for Space Applications III; SPIE: Bellingham, WA, USA, 2009. [Google Scholar]
- Chen, H.; Shen, D.; Chen, G.; Blasch, E.; Pham, K. Space object tracking with delayed measurements. In Proceedings Volume 7691, Space Missions and Technologies; SPIE: Bellingham, WA, USA, 2010. [Google Scholar]
- Jia, B.; Pham, K.D.; Blasch, E.; Shen, D.; Wang, Z.; Chen, G. Cooperative Space Object Tracking using Space-based Optical Sensors via Consensus-based Filters. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1908–1936. [Google Scholar] [CrossRef]
- Chen, H.; Shen, D.; Chen, G.; Blasch, E.P.; Pham, K. Tracking evasive objects via a search allocation game. In Proceedings of the American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6981–6986. [Google Scholar]
- Xu, P.; Chen, H.; Charalampidis, D.; Shen, D.; Chen, G.; Blasch, E.; Pham, K. Sensor management for collision alert in orbital object tracking. In Proceedings Volume 8044, Sensors and Systems for Space Applications IV; SPIE: Bellingham, WA, USA, 2011. [Google Scholar]
- Hall, Z.; Singla, P. Reachability Analysis Based Tracking: Applications to Non-cooperative Space Object Tracking. In Proceedings of the 3rd Int‘l Conference on Dynamic Data Driven Applications Systems, Boston, MA, USA, 2–4 October 2020. [Google Scholar]
- Crouse, D. On measurement-based light-time corrections for bistatic orbital debris tracking. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2502–2518. [Google Scholar] [CrossRef]
- Li, L.; Ding, Y.; Zhang, J.; Zhang, R. Blind Detection with Unique Identification in Two-Way Relay Channel. IEEE Trans. Wirel. Commun. 2012, 11, 2640–2648. [Google Scholar] [CrossRef]
- Ding, Y.; Li, L.; Zhang, J.-K. Blind Transmission and Detection Designs with Unique Identification and Full Diversity for Noncoherent Two-Way Relay Networks. IEEE Trans. Veh. Technol. 2014, 63, 3137–3146. [Google Scholar] [CrossRef]
- Shu, Z.; Wang, G.; Tian, X.; Shen, D.; Pham, K.; Blasch, E.; Chen, G. Game theoretic power allocation and waveform selection for satellite communications. In Proceedings Volume 9469, Sensors and Systems for Space Applications VIII; SPIE: Bellingham, WA, USA, 2015. [Google Scholar]
- Shen, D.; Chen, G.; Blasch, E.; Tadda, G. Adaptive Markov Game Theoretic Data Fusion Approach for Cyber Network Defense. In Proceedings of the MILCOM 2007—IEEE Military Communications Conference, Orlando, FL, USA, 29–31 October 2007. [Google Scholar]
- Lu, L.; Niu, R. Sparse attacking strategies in multi-sensor dynamic systems maximizing state estimation errors. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016. [Google Scholar]
- Wei, S.; Shen, D.; Chen, G.; Zhang, H.; Yu, W.; Blasch, E.; Pham, K.; Cruz, J.B. On effectiveness of game theoretic modeling and analysis against cyber threats for avionic systems. In Proceedings of the IEEE/AIAA Digital Avionics System Conference, Prague, Czech Republic, 13–17 September 2015. [Google Scholar]
- Do, C.T.; Tran, N.H.; Hong, C.; Kamhoua, C.A.; Kwiat, K.A.; Blasch, E.; Ren, S.; Pissinou, N.; Iyengar, S.S. Game Theory for Cyber Security and Privacy. ACM Comput. Surv. 2017, 50, 30. [Google Scholar] [CrossRef]
- Mortlock, T.; Kassas, Z.M. Assessing Machine Learning for LEO Satellite Orbit Determination in Simultaneous Tracking and Navigation. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Krishnaswamy, S.; Kumar, M. A Machine Learning Based Data Association Approach for Space Situational Awareness. In Proceedings of the Conference: AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Little, B.D.; Frueh, C.E. Space Situational Awareness Sensor Tasking: Comparison of Machine Learning with Classical Optimization Methods. J. Guid. Control. Dyn. 2020, 43, 262–273. [Google Scholar] [CrossRef]
- Zhao, Y. Application of Machine Learning in Network Security Situational Awareness. In Proceedings of the 2021 World Conference on Computing and Communication Technologies (WCCCT), Dalian, China, 23–25 January 2021; pp. 39–46. [Google Scholar] [CrossRef]
- Harvey, A.E.; Laskey, K.B. Online Learning Techniques for Space Situational Awareness (Poster). In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Shen, D.; Lu, J.; Chen, G.; Blasch, E.; Sheaff, C.; Pugh, M.; Pham, K. Methods of Machine Learning for Space Object Pattern Classification. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 565–572. [Google Scholar] [CrossRef]
- Spiller, D.; Magionami, E.; Schiattarella, V.; Curti, F.; Facchinetti, C.; Ansalone, L.; Tuozzi, A. “On-orbit recognition of resident space objects by using star trackers. Acta Astronaut. 2020, 177, 478–496. [Google Scholar] [CrossRef]
- Serra, R.; Yanez, C.; Frueh, C. Tracklet-to-orbit association for maneuvering space objects using optimal control theory. Acta Astronaut. 2021, 181, 271–281. [Google Scholar] [CrossRef]
- Shen, D.; Sheaff, C.; Lu, J.; Chen, G.; Blasch, E.; Pham, K. Adaptive markov inference game optimization (AMIGO) for rapid discovery of satellite behaviors. Int. Soc. Opt. Photonics 2019, 2019, 1101708. [Google Scholar]
- Blasch, E.; Shen, D.; Chen, G.; Sheaff, C.; Pham, K. Space Object Tracking Uncertainty Analysis with the URREF Ontology. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Shen, D.; Sheaff, C.; Chen, G.; Lu, J.; Guo, M.; Blasch, E.; Pham, K. Game theoretic training enabled deep learning solutions for rapid discovery of satellite behaviors. In Satellite Systems-Design, Modeling, Simulation and Analysis; IntechOpen: Rijeka, Croatia, 2020. [Google Scholar]
- Shen, D.; Sheaff, C.; Guo, M.; Blasch, E.; Pham, K.; Chen, G. Enhanced GANs for satellite behavior discovery. Int. Soc. Opt. Photonics 2020, 11422, 114220F. [Google Scholar]
- Roberts, T.; Siew, P.M.; Jang, D.; Linares, R. A Deep Reinforcement Learning Application to Space-based Sensor Tasking for Space Situational Awareness. In Proceedings of the 2021 Advanced Maui Optical and Space Surveillance Technologies Conference (AMOS), Wailea Beach Resort, Maui, HI, USA, 14–17 September 2021. [Google Scholar]
- Siew, P.M.; Jang, D.; Roberts, T.; Linares, R. Space-Based Sensor Tasking Using Deep Reinforcement Learning. J. Astronaut. Sci. 2022. [Google Scholar] [CrossRef]
- Siew, P.M.; Linares, R. Optimal Tasking of Ground-Based Sensors for Space Situational Awareness Using Deep Reinforcement Learning. Sensors 2022, 22, 7874. [Google Scholar] [CrossRef] [PubMed]
- Barnes, C.; Puran, A.; Beninati, A.; Douard, N.; Nowak, M.; Appiah, O.; Prashad, C.; Kerwick, A.; Das, N.; Wang, Y.; et al. Space Situational Awareness (SSA) and Quantum Neuromorphic Computing. In Proceedings of the 2022 IEEE International Conference on Imaging Systems and Techniques (IST), Kaohsiung, Taiwan, 21–23 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Available online: https://www.esa.int/ESA_Multimedia/Images/2020/03/Low_Earth_orbit (accessed on 5 October 2022).
- Available online: https://www.nasa.gov/mission_pages/station/news/orbital_debris.html (accessed on 5 October 2022).
- Kalsotra, R.; Arora, S. Background subtraction for moving object detection: Explorations of recent developments and challenges. Vis. Comput. 2021, 38, 4151–4178. [Google Scholar] [CrossRef]
- Maddalena, L.; Petrosino, A. Background Subtraction for Moving Object Detection in RGBD Data: A Survey. J. Imaging 2018, 4, 71. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Ji, H.; Zhang, W. Coarse-to-fine sample-based background subtraction for moving object detection. Optik 2020, 207, 164195. [Google Scholar] [CrossRef]
- Diamond, D.; Heyns, P.; Oberholster, A. Accuracy evaluation of sub-pixel structural vibration measurements through optical flow analysis of a video sequence. Measurement 2017, 95, 166–172. [Google Scholar] [CrossRef]
- Yi, W.; Fang, Z.; Li, W.; Hoseinnezhad, R.; Kong, L. Multi-Frame Track-Before-Detect Algorithm for Maneuvering Target Tracking. IEEE Trans. Veh. Technol. 2020, 69, 4104–4118. [Google Scholar] [CrossRef]
- Yi, W.; Fu, L.; García-Fernández, Á.F.; Xu, L.; Kong, L. Particle filtering based track-before-detect method for passive array sonar systems. Signal Process. 2019, 165, 303–314. [Google Scholar] [CrossRef]
- Huang, W.; Kang, Y.; Zheng, S. An improved frame difference method for moving target detection. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 1537–1541. [Google Scholar] [CrossRef]
- Husein, A.M.; Calvin; Halim, D.; Leo, R. Motion detect application with frame difference method on a surveillance camera. J. Phys. Conf. Ser. 2019, 1230, 012017. [Google Scholar] [CrossRef]
- Cataldo, D.; Gentile, L.; Ghio, S.; Giusti, E.; Tomei, S.; Martorella, M. Multibistatic Radar for Space Surveillance and Tracking. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 14–30. [Google Scholar] [CrossRef]
- Xiao, K.; Li, P.; Wang, G.; Li, Z.; Chen, Y.; Xie, Y.; Fang, Y. A Preliminary Research on Space Situational Awareness Based on Event Cameras. In Proceedings of the 2022 13th International Conference on Mechanical and Aerospace Engineering (ICMAE), Bratislava, Slovakia, 20–22 July 2022; pp. 390–395. [Google Scholar] [CrossRef]
- Kothari, V.; Liberis, E.; Lane, N.D. The Final Frontier: Deep Learning in Space. arXiv 2020, arXiv:2001.10362. [Google Scholar]
- Mishra, R.K.; Reddy, G.Y.S.; Pathak, H. The Understanding of Deep Learning: A Comprehensive Review. Math. Probl. Eng. 2021, 2021, 5548884. [Google Scholar] [CrossRef]
- Li, W.; Wang, K.; You, L. A Deep Convolutional Network for Multitype Signal Detection and Classification in Spectrogram. Math. Probl. Eng. 2021, 2021, 9797302. [Google Scholar] [CrossRef]
- Saleem, T.J.; Chishti, M.A. Deep learning for the internet of things: Potential benefits and use-cases. Digit. Commun. Netw. 2021, 7, 526–542. [Google Scholar] [CrossRef]
- Tao, J.; Cao, Y.; Zhuang, L.; Zhang, Z.; Ding, M. Deep Convolutional Neural Network Based Small Space Debris Saliency Detection. In Proceedings of the 2019 25th International Conference on Automation and Computing (ICAC), Lancaster, UK, 5–7 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- De Vittori, A.; Cipollone, R.; Di Lizia, P.; Massari, M. Real-time space object tracklet extraction from telescope survey images with machine learning. Astrodyn 2022, 6, 205–218. [Google Scholar] [CrossRef]
- Pooja, C.; Jaisharma, K. Novel Framework for the Improvement of Object Detection Accuracy of Smart Surveillance Camera Visuals using Modified Convolutional Neural Network Technique compared with Support Vector Machine. In Proceedings of the 2022 International Conference on Business Analytics for Technology and Security (ICBATS); 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Y.; Huo, C.; Xu, N.; Wang, L.; Pan, C. PSNet: Perspective-sensitive convolutional network for object detection. Neurocomputing 2022, 468, 384–395. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, M.; Wang, J.; Guo, X.; Yang, Y.; Wang, J. Multi-Scale Deep Neural Network Based on Dilated Convolution for Spacecraft Image Segmentation. Sensors 2022, 22, 4222. [Google Scholar] [CrossRef]
- Available online: https://arxiv.org/pdf/1909.09586.pdf (accessed on 26 November 2022).
- Kim, C.; Lee, J.; Han, T.; Kim, Y.-M. A hybrid framework combining background subtraction and deep neural networks for rapid person detection. J. Big Data 2018, 5, 22. [Google Scholar] [CrossRef]
- Available online: https://arxiv.org/pdf/1612.08242.pdf (accessed on 26 November 2022).
- Liu, G.; Tan, Y.; Chen, L.; Kuang, W.; Li, B.; Duan, F.; Zhu, C. The Development of a UAV Target Tracking System Based on YOLOv3-Tiny Object Detection Algorithm. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 1636–1641. [Google Scholar] [CrossRef]
- Qi, Q.; Wang, H.; Su, T.; Liu, X. Learning temporal information and object relation for zero-shot action recognition. Displays 2022, 73, 102177. [Google Scholar] [CrossRef]
- Qin, J.; Jiang, H.; Lu, N.; Yao, L.; Zhou, C. Enhancing solar PV output forecast by integrating ground and satellite observations with deep learning. Renew. Sustain. Energy Rev. 2022, 167, 112680. [Google Scholar] [CrossRef]
- Available online: https://web.stanford.edu/class/psych209/Readings/SuttonBartoIPRLBook2ndEd.pdf (accessed on 26 November 2022).
- Oakes, B.; Richards, D.; Barr, J.; Ralph, J. Double Deep Q Networks for Sensor Management in Space Situational Awareness. In Proceedings of the 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 4–7 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Lei, W.; Fu, H.; Sun, G. Active object tracking of free-floating space manipulators based on deep reinforcement learning. Adv. Space Res. 2022, 70, 3506–3519. [Google Scholar] [CrossRef]
- Linares, R.; Furfaro, R. An Autonomous Sensor Tasking Approach for Large Scale Space Object Cataloging. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 19–22 September 2017. [Google Scholar]
- Xiang, Y.; Xi, J.; Cong, M.; Yang, Y.; Ren, C.; Han, L. Space debris detection with fast grid-based learning. In Proceedings of the 2020 IEEE 3rd International Conference of Safe Production and Informatization (IICSPI), Chongqing, China, 28–30 November 2020; pp. 205–209. [Google Scholar] [CrossRef]
- Richards, M. Fundamentals of Radar Signal Processing; McGraw Hill: New York, NY, USA, 2005. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.; Li, K.; Li, F. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Hanin, B. Which neural net architec-tures give rise to exploding and vanishing gradients? In Proceedings of the Advances in Neural Information Processing Systems 31, Montreal, QB, Canada, 3–8 December 2018; pp. 582–591. [Google Scholar]
- Massimi, F.; Benedetto, F. Deep Learning-based Detection Methods for Covert Communications in E- Health Transmissions. In Proceedings of the 2022 45th International Conference on Telecommunications and Signal Processing (TSP), Prague, Czech Republic, 13–15 July 2022; pp. 11–16. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; p. 1. [Google Scholar]









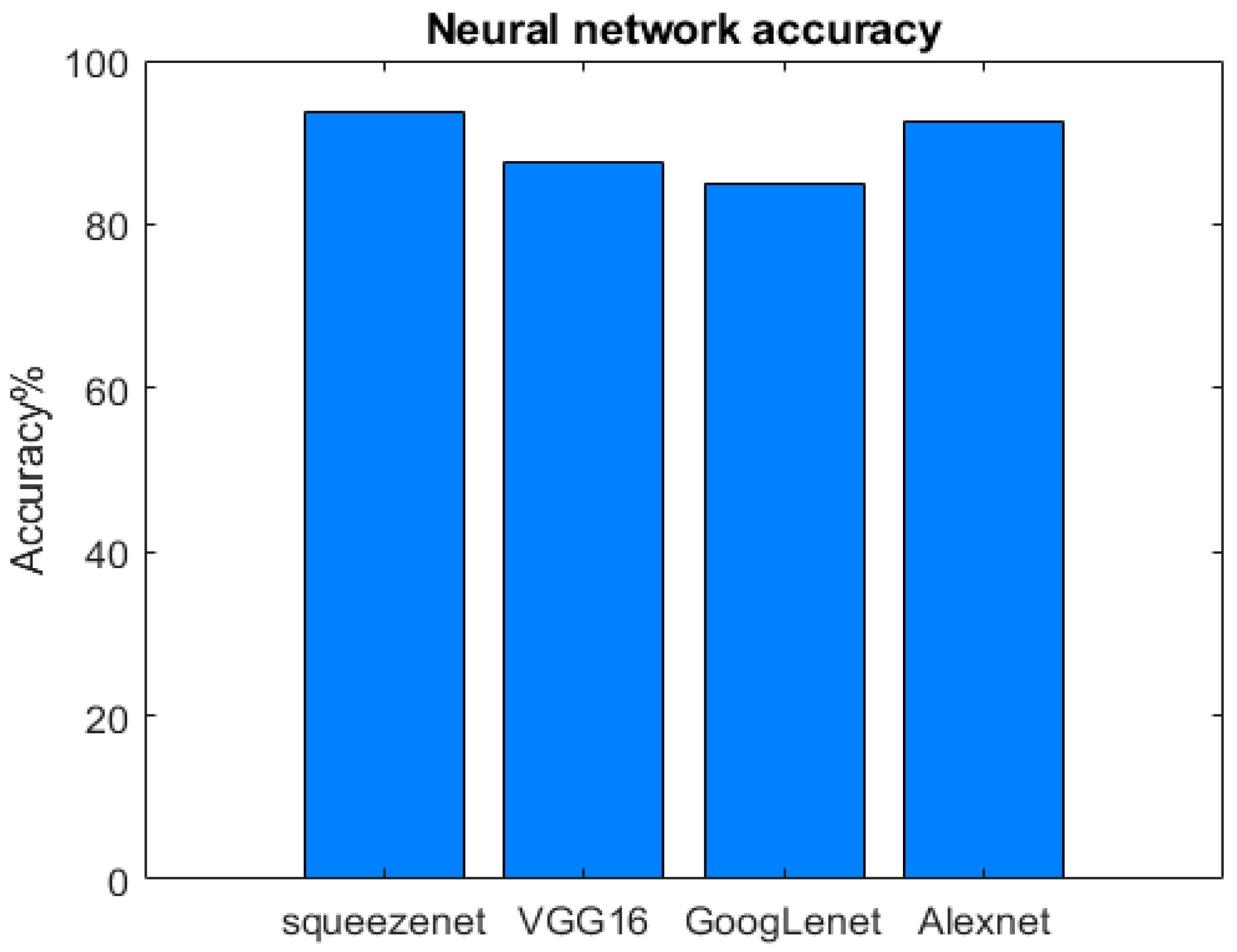
| Squeeze Net | VGG-16 | Google Net | Alex Net | |
|---|---|---|---|---|
| Precision | 0.937 | 0.875 | 0.852 | 0.925 |
| Recall | 0.94 | 0.885 | 0.855 | 0.932 |
| F-measure | 0.937 | 0.872 | 0.842 | 0.928 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massimi, F.; Ferrara, P.; Benedetto, F. Deep Learning Methods for Space Situational Awareness in Mega-Constellations Satellite-Based Internet of Things Networks. Sensors 2023, 23, 124. https://doi.org/10.3390/s23010124
Massimi F, Ferrara P, Benedetto F. Deep Learning Methods for Space Situational Awareness in Mega-Constellations Satellite-Based Internet of Things Networks. Sensors. 2023; 23(1):124. https://doi.org/10.3390/s23010124
Chicago/Turabian StyleMassimi, Federica, Pasquale Ferrara, and Francesco Benedetto. 2023. "Deep Learning Methods for Space Situational Awareness in Mega-Constellations Satellite-Based Internet of Things Networks" Sensors 23, no. 1: 124. https://doi.org/10.3390/s23010124