
Three-Level Distributed Real-Time Monitoring of Construction near Underground Infrastructure Using a Combined Intelligent Method


Abstract
:1. Introduction
2. Proposed Vibration Recognition Method
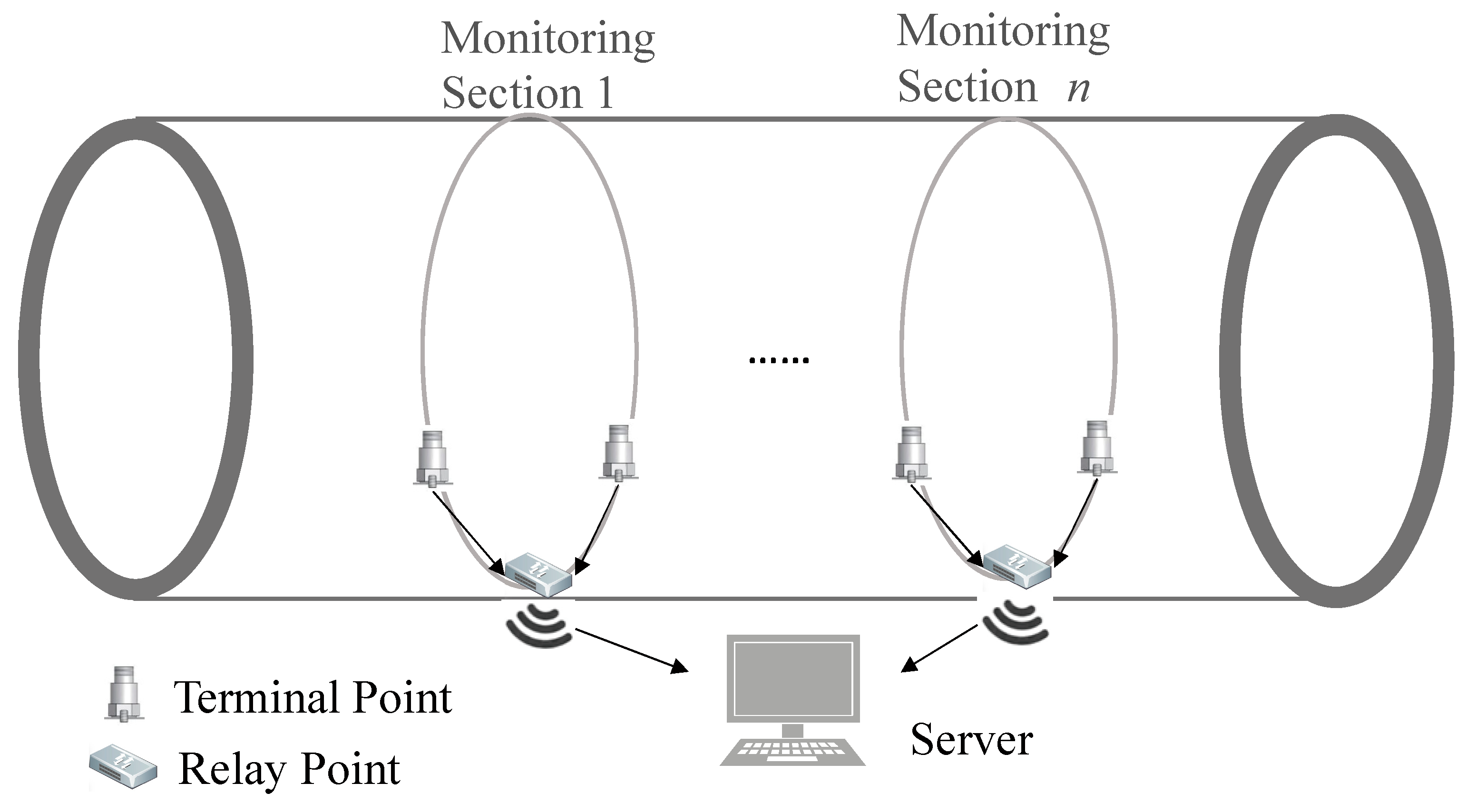
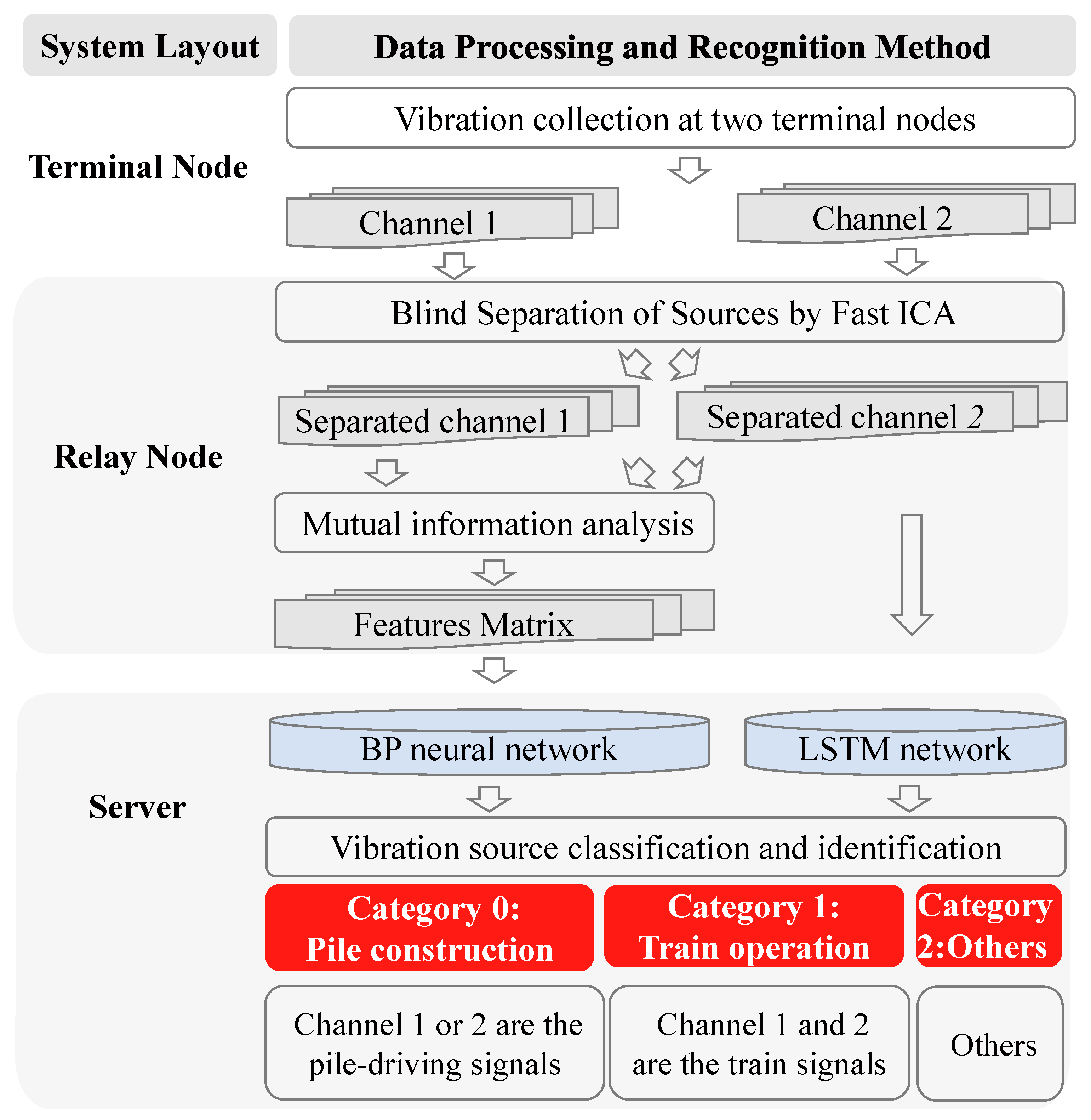
2.1. Outline of Proposed Method
- Terminal node for data acquisition and processing
- Relay node for mutual analysis and feature screening
- Intelligent recognition of construction behavior at server

- Signal collection and sampling at terminal node
- Blind source separation and MI analysis at relay node
- Vibration source classification and construction behavior intelligent recognition at server
2.2. Vibration Signal Blind Source Separation
- Generate a random unmixing matrix that satisfies ;
- Assume and iterate k;
- Standardize and make ;
- When the convergence condition is verified according to , end the cycle step, and end the algorithm after outputting the final unmixing matrix to obtain the solution of independent component ; otherwise, return to step 2 and continue with the iterations.
2.3. Mutual Information Analysis Method
2.4. Intelligent Recognition Method
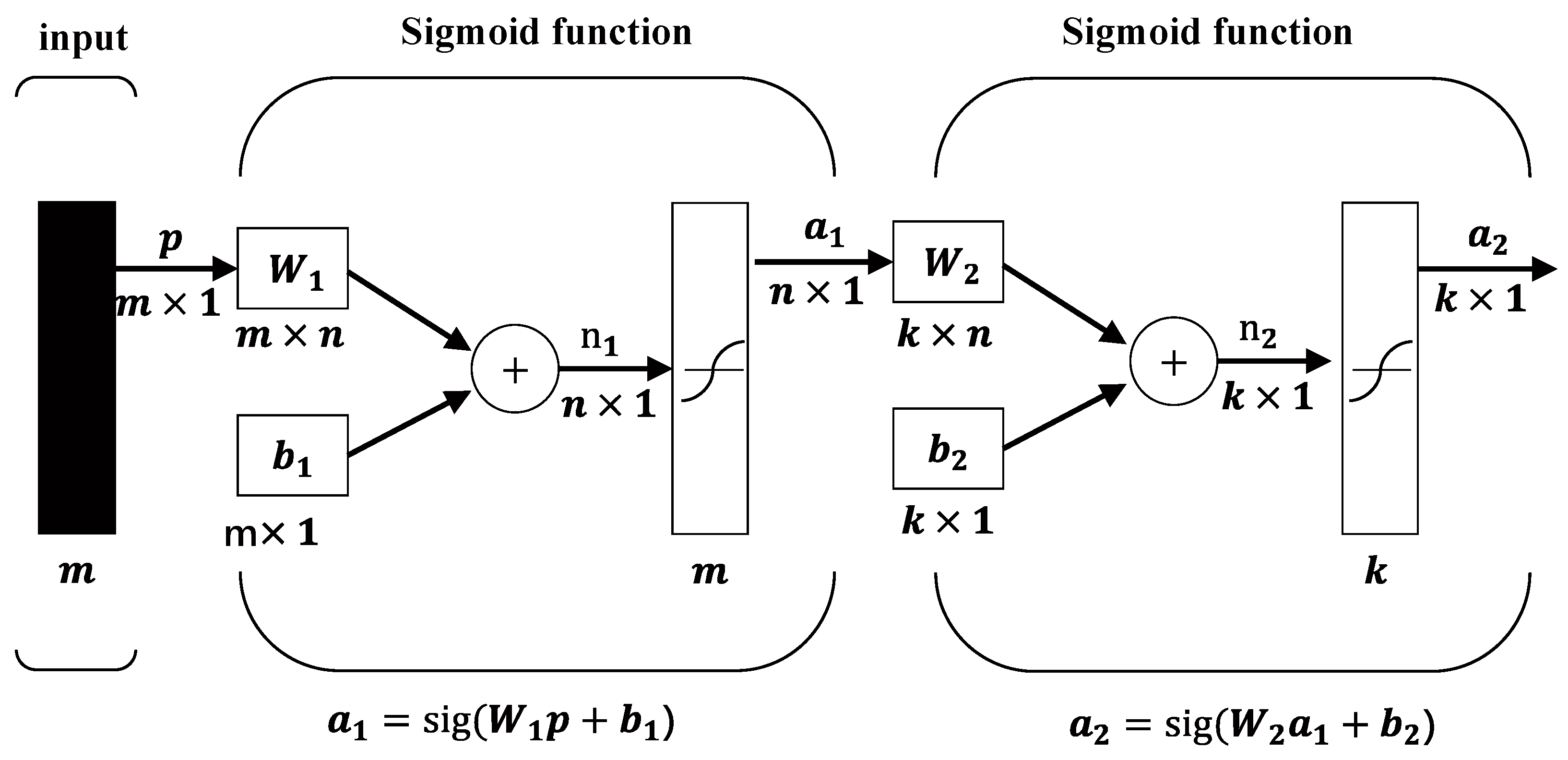
2.4.1. MLP Neural Network
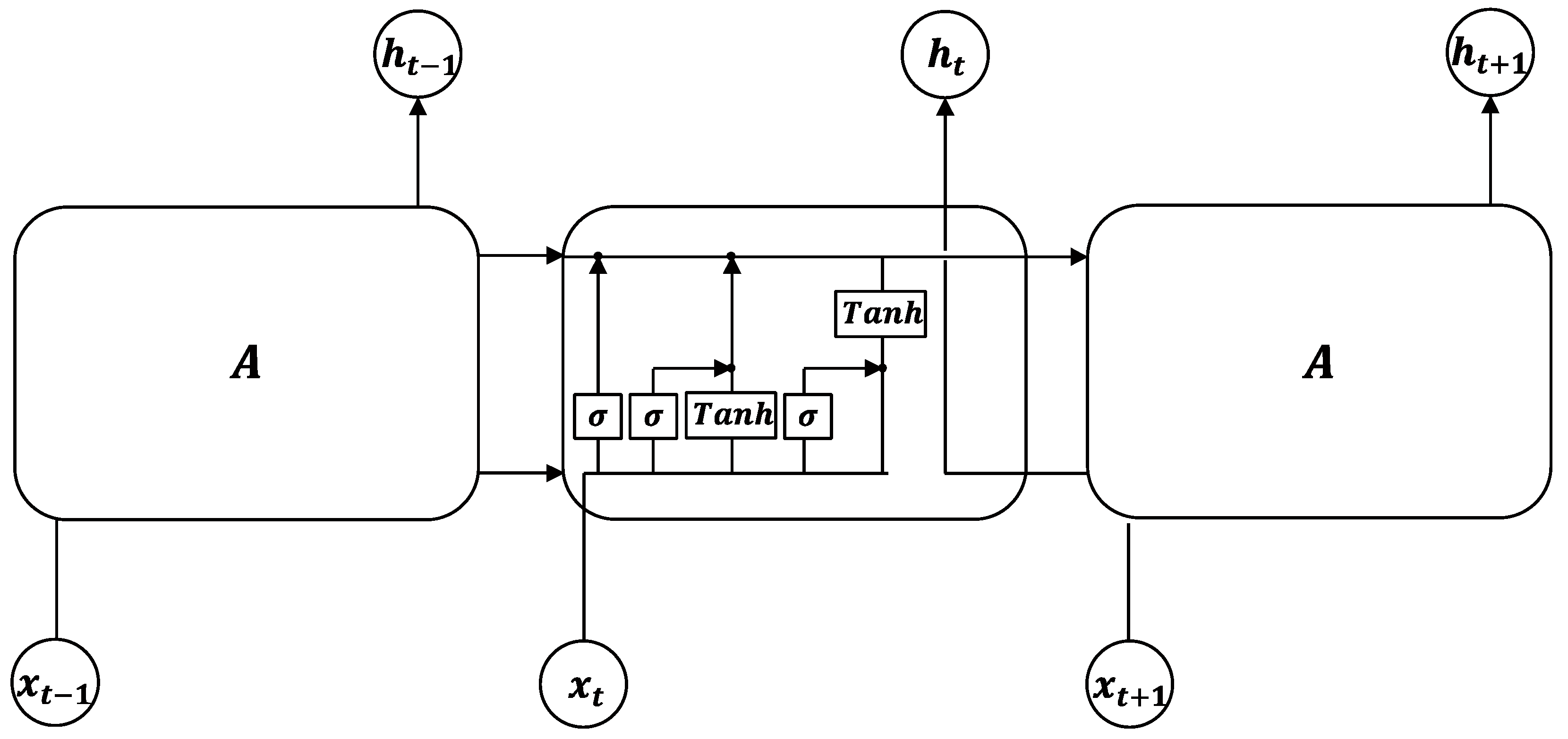
2.4.2. LSTM Method
3. Vibration Signal Separation and Data Preparation
3.1. Vibration Measurement and Data Preparation
3.1.1. Pile-Driving-Induced Signals
3.1.2. Train-Operation-Induced Signals
3.1.3. Others
3.2. Signal Separation Using FastICA and Comparison
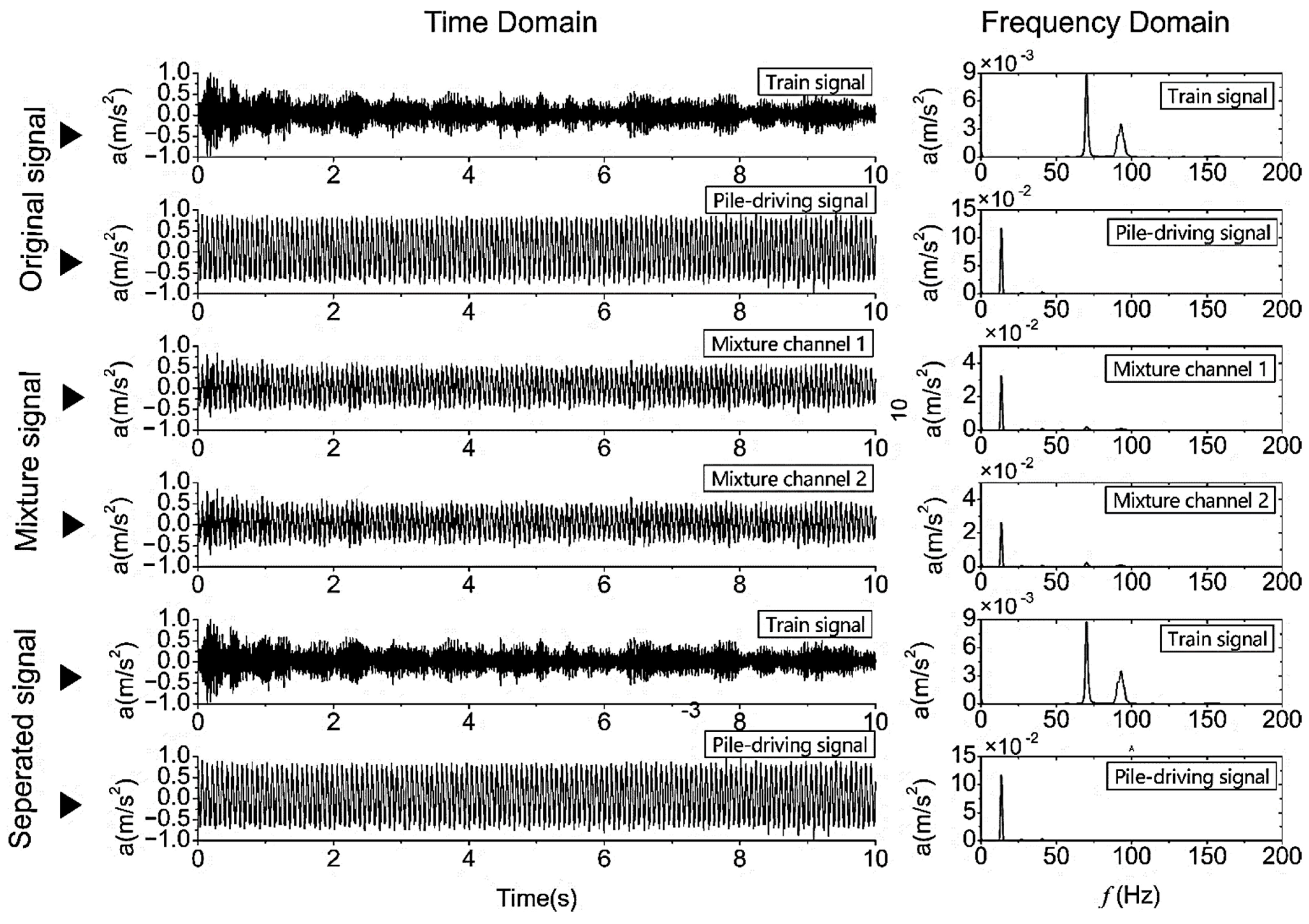
3.2.1. The Separation of Train Operation and Pile-Driving Mixed Signals
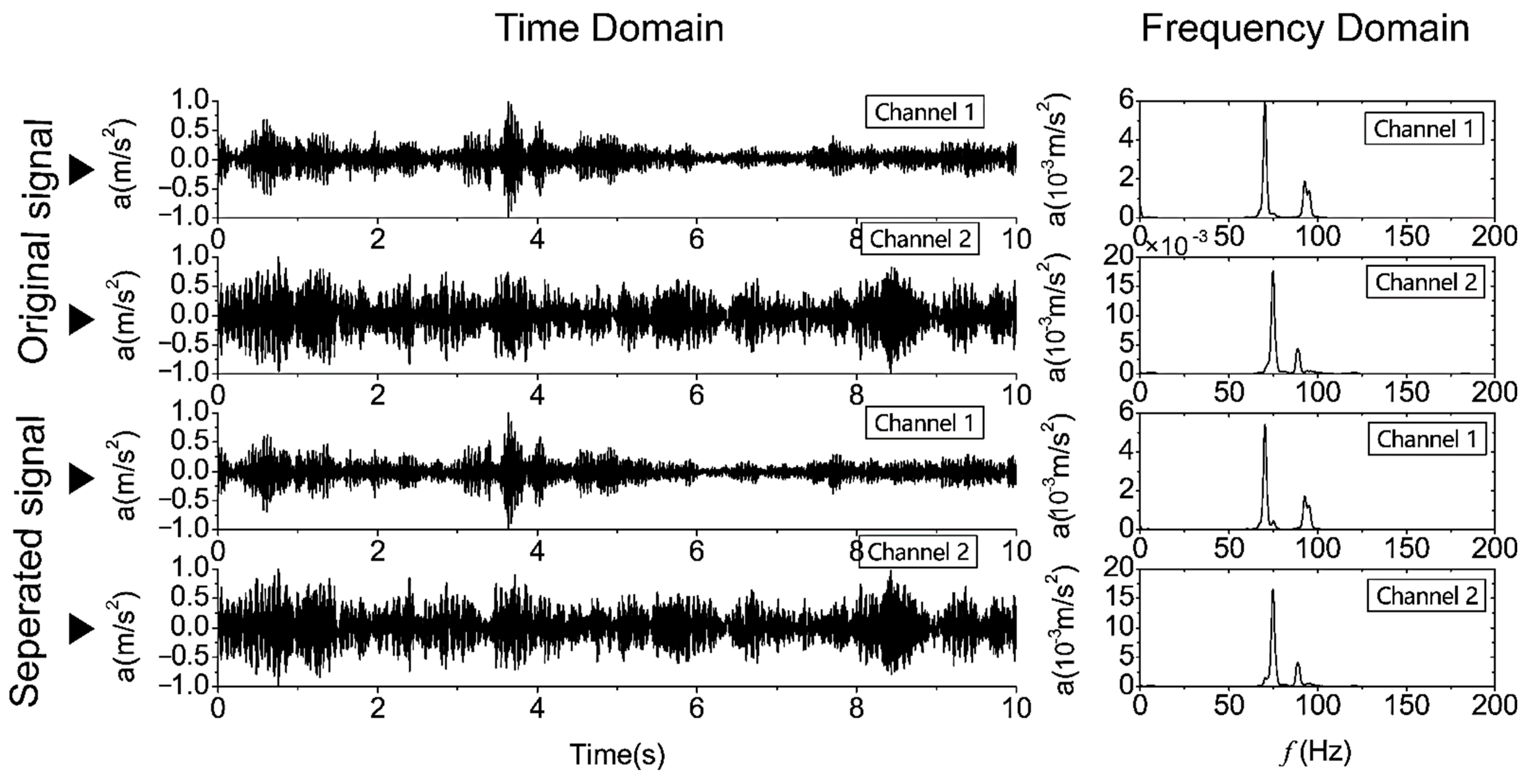
3.2.2. The Separation of Single-Type Signals
3.3. Dataset Preparation and Features Analysis
3.3.1. Sample Preparation and Dataset Construction
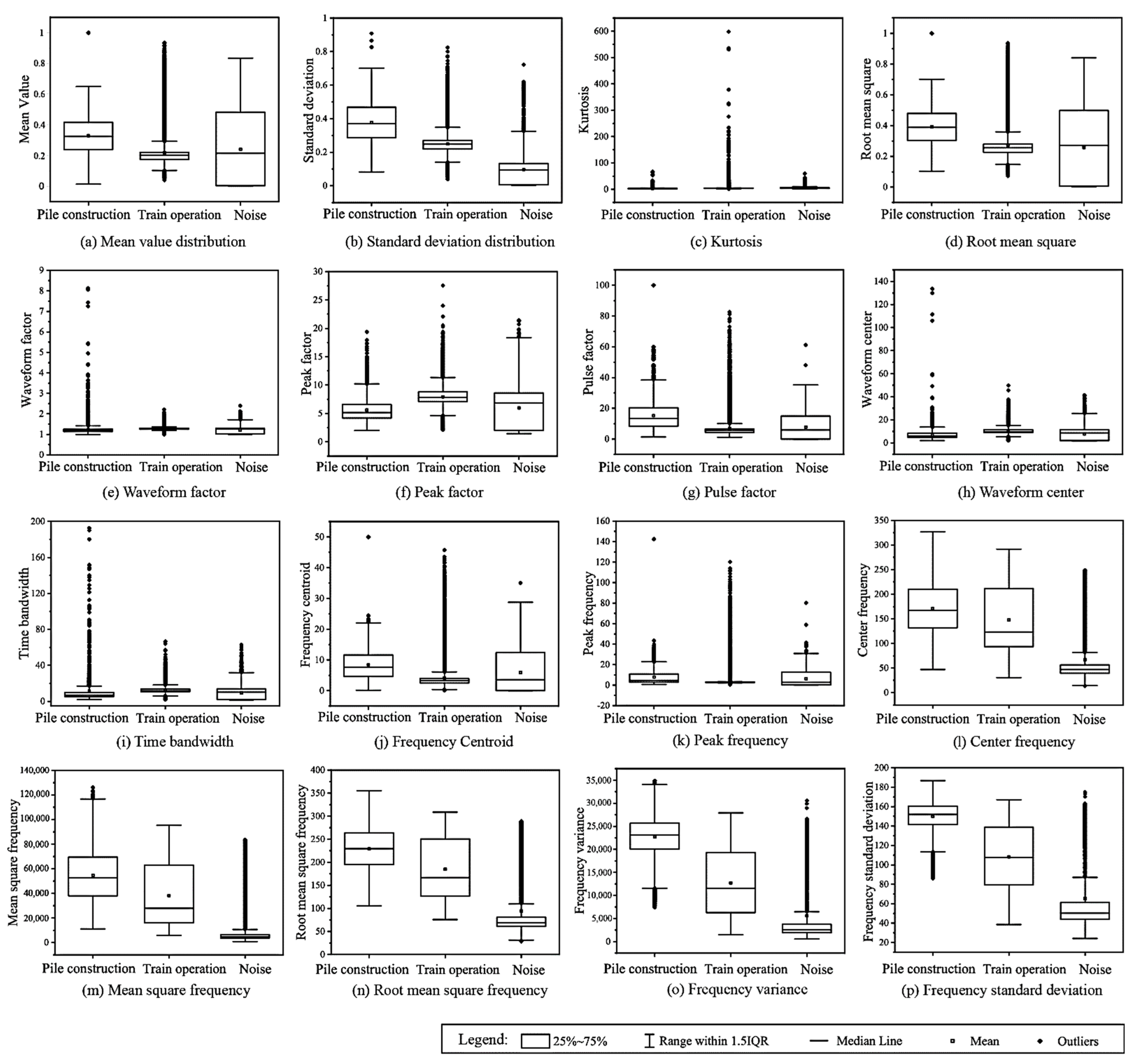
3.3.2. Typical Time and Frequency Domain Features
4. Application of Combined MI-MLP Neural Network Method
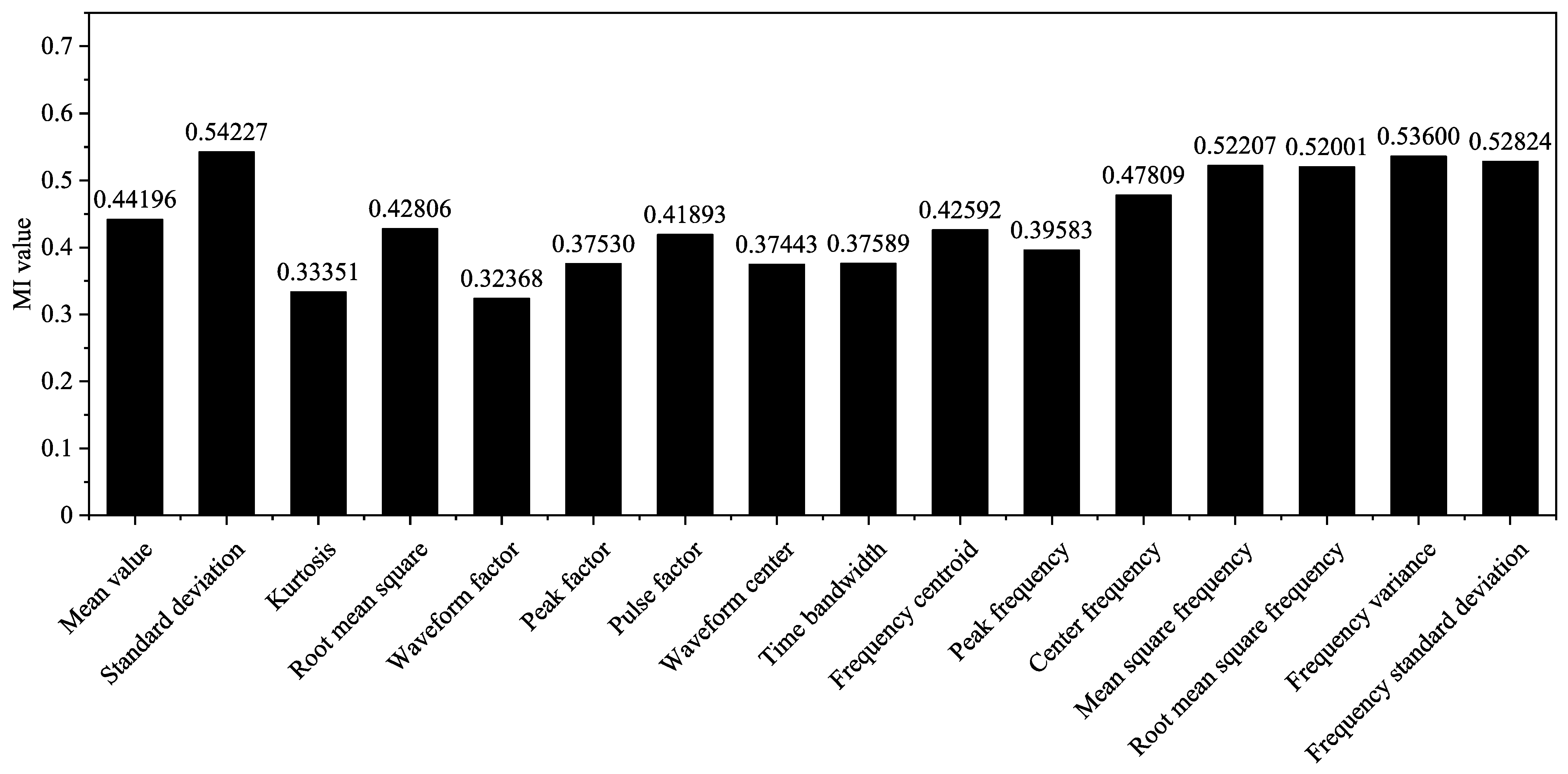
4.1. MI Analysis and Feature Selection
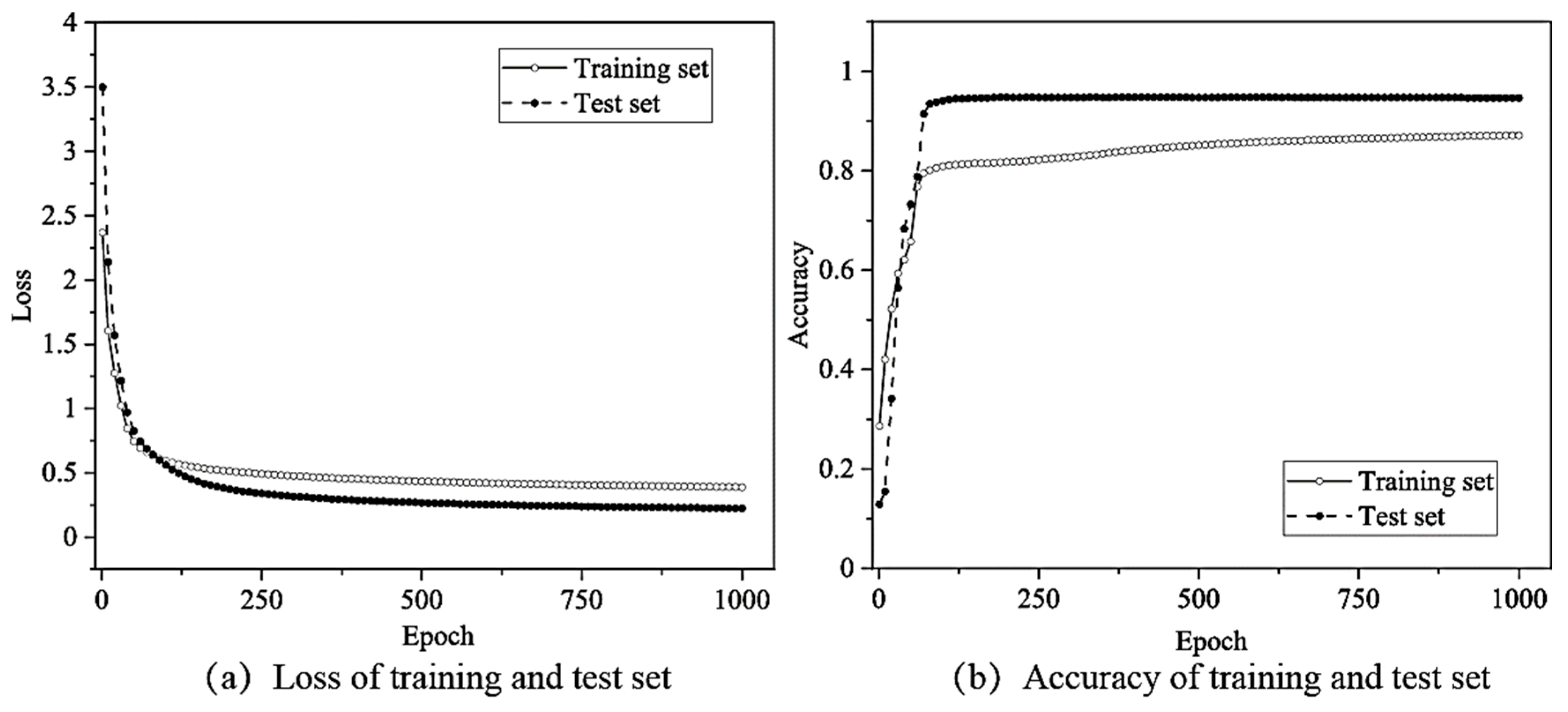
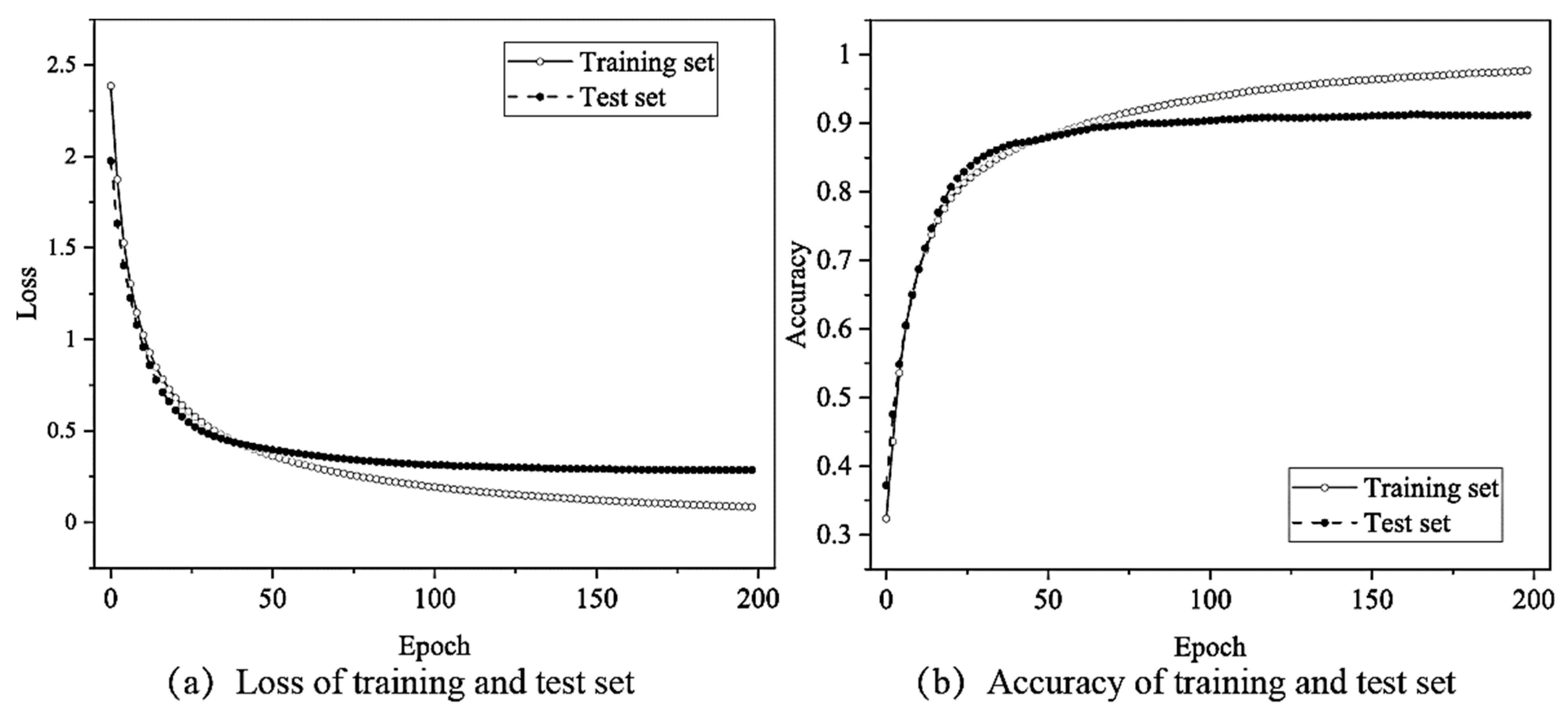
4.2. Training and Testing of the MLP Neural Network
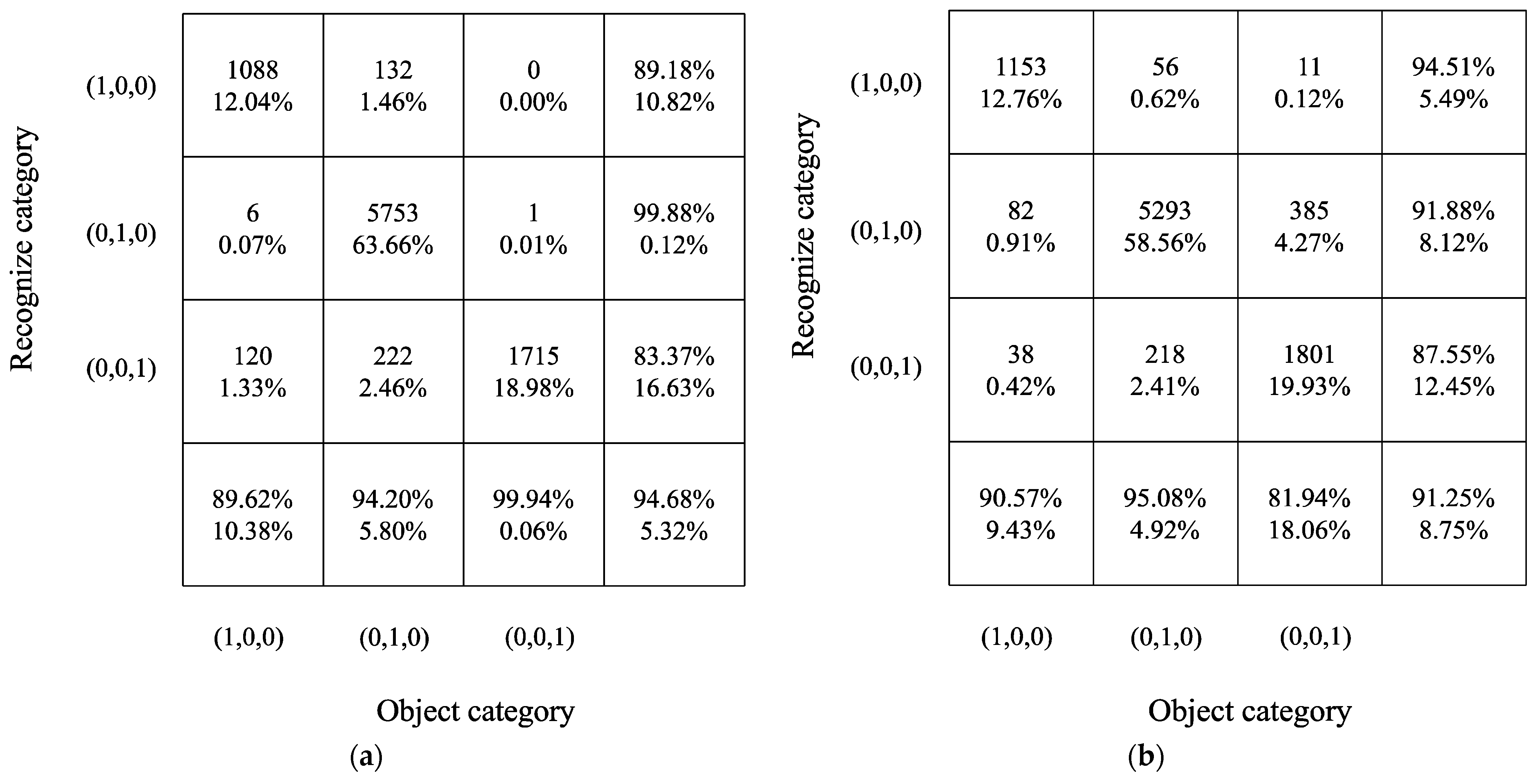
4.3. The Effect of MI Analysis and Feature Selection
5. Comparison with LSTM Network-Based Recognition Method
5.1. Hyperparameter Searching
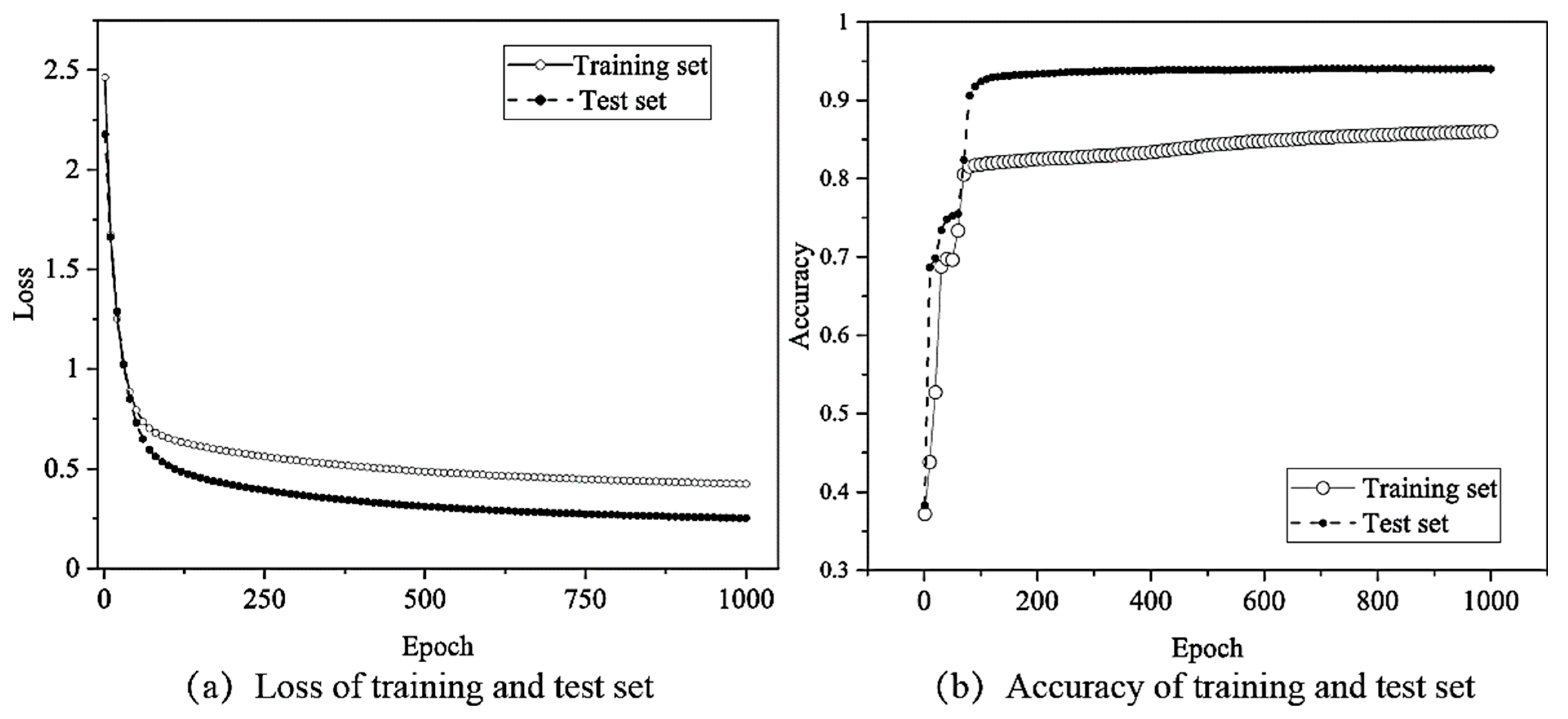
5.2. Training and Testing of LSTM Network
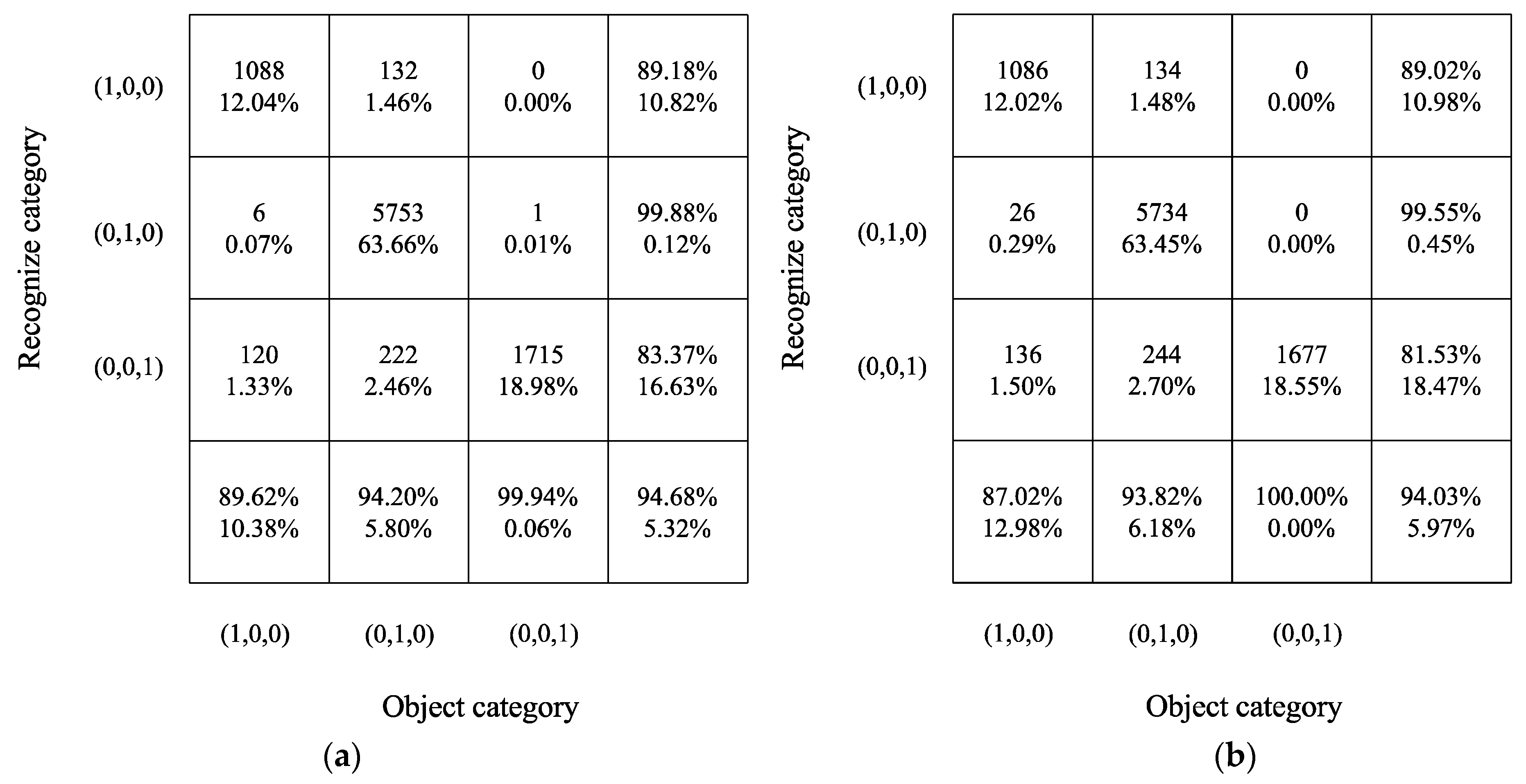
5.3. Method Comparison
6. Conclusions
- The recognition accuracies obtained by the LSTM and MI-MLP methods when using the test set were both greater than 90%, which can meet the needs of practical applications. This demonstrates the feasibility of real-time construction monitoring with suitable recognition robustness.
- Blind source separation can decompose mixed signals into a limited number of identifiable samples, which can help minimize the number of classification categories caused by signal mixing and improve recognition accuracy.
- Feature compression and selection after MI analysis can increase the training efficiency and recognition accuracy. Especially for signals with a centralized distribution of frequency domain features, the recognition accuracy of the MLP network will have a better performance than that of a well-known time series prediction LSTM model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xie, X.; Wang, Q.; Shahrour, I.; Li, J.; Zhou, B. A real-time interaction platform for settlement control during shield tunnelling construction. Autom. Constr. 2018, 94, 154–167. [Google Scholar] [CrossRef]
- Gómez, J.; Casas, J.R.; Villalba, S. Structural Health Monitoring with Distributed Optical Fiber Sensors of tunnel lining affected by nearby construction activity. Autom. Constr. 2020, 117, 103261. [Google Scholar] [CrossRef]
- Ross, Z.E.; Trugman, D.T.; Hauksson, E.; Shearer, P.M. Searching for hidden earthquakes in Southern California. Science 2019, 364, 767–771. [Google Scholar] [CrossRef] [Green Version]
- Umlauft, J.; Korn, M. 3-D fluid channel location from noise tremors using matched field processing. Geophys. J. Int. 2019, 219, 1550–1561. [Google Scholar] [CrossRef]
- Zhang, H.; Eaton, D.; Rodríguez-Pradilla, G.; Jia, S.Q. Source-Mechanism Analysis and Stress Inversion for Hydraulic-Fracturing-Induced Event Sequences near Fox Creek, Alberta. Bull. Seismol. Soc. Am. 2019, 109, 636–651. [Google Scholar] [CrossRef]
- Ventura, C.E.; Liam Finn, W.D.; Lord, J.-F.; Fujita, N. Dynamic characteristics of a base isolated building from ambient vibration measurements and low level earthquake shaking. Soil Dyn. Earthq. Eng. 2003, 23, 313–322. [Google Scholar] [CrossRef]
- Newton, C.; Snieder, R. Estimating Intrinsic Attenuation of a Building Using Deconvolution Interferometry and Time Reversal. Bull. Seismol. Soc. Am. 2012, 102, 2200–2208. [Google Scholar] [CrossRef]
- Lorenzoni, F.; Casarin, F.; Caldon, M.; Islami, K.; Modena, C. Uncertainty quantification in structural health monitoring: Applications on cultural heritage buildings. Mech. Syst. Signal Process. 2016, 66–67, 268–281. [Google Scholar] [CrossRef]
- HoThu, H.; Mita, A. Assessment and evaluation of damage detection method based on modal frequency changes. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2013; Lynch, J.P., Yun, C.-B., Wang, K.-W., Eds.; SPIE: Washington, DC, USA, 2013; Volume 8692, p. 86923M. [Google Scholar]
- Spence, S.M.J.; Bernardini, E.; Guo, Y.; Kareem, A.; Gioffrè, M. Natural frequency coalescing and amplitude dependent damping in the wind-excited response of tall buildings. Probabilistic Eng. Mech. 2014, 35, 108–117. [Google Scholar] [CrossRef]
- Li, L.; Tan, J.; Schwarz, B.; Staněk, F.; Poiata, N.; Shi, P.; Diekmann, L.; Eisner, L.; Gajewski, D. Recent Advances and Challenges of Waveform-Based Seismic Location Methods at Multiple Scales. Rev. Geophys. 2020, 58, e2019RG000667. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, F.; Xie, X. Vibration Characteristics of Underground Structure and Surrounding Soil Underneath High Speed Railway Based on Field Vibration Tests. Shock Vib. 2018, 2018, 3526952. [Google Scholar] [CrossRef]
- Zhou, B.; Xie, X.; Wang, X. The Tunnel Structural Mode Frequency Characteristics Identification and Analysis Based on a Modified Stochastic Subspace Identification Method. Shock Vib. 2018, 2018, 6595841. [Google Scholar] [CrossRef]
- Zhao, A.; Qi, L.; Dong, J.; Yu, H. Dual channel LSTM based multi-feature extraction in gait for diagnosis of Neurodegenerative diseases. Knowl.-Based Syst. 2018, 145, 91–97. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Lu, L.; Xu, Z.; He, J.; Zhou, J.; Zhang, C. Dual-channel CNN for efficient abnormal behavior identification through crowd feature engineering. Mach. Vis. Appl. 2019, 30, 945–958. [Google Scholar] [CrossRef] [Green Version]
- Jung, M.; Chi, S. Human activity classification based on sound recognition and residual convolutional neural network. Autom. Constr. 2020, 114, 103177. [Google Scholar] [CrossRef]
- Sezgin, N. A new hand finger movements’ classification system based on bicoherence analysis of two-channel surface EMG signals. Neural Comput. Appl. 2019, 31, 3327–3337. [Google Scholar] [CrossRef]
- Tang, Z.; Chen, Z.; Bao, Y.; Li, H. Convolutional neural network-based data anomaly detection method using multiple information for structural health monitoring. Struct. Control Health Monit. 2019, 26, e2296. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.; He, P.; Zhao, Y.; Ma, S.; Mi, H.; Wei, Z.; Li, Z. Real-time online detection of trucks loading via genetic neural network. Autom. Constr. 2020, 120, 103354. [Google Scholar] [CrossRef]
- Clemente, J.; Li, F.; Valero, M.; Song, W. Smart Seismic Sensing for Indoor Fall Detection, Location, and Notification. IEEE J. Biomed. Health Inform. 2020, 24, 524–532. [Google Scholar] [CrossRef]
- Liu, Z.; Li, S. A sound monitoring system for prevention of underground pipeline damage caused by construction. Autom. Constr. 2020, 113, 103125. [Google Scholar] [CrossRef]
- Musafere, F.; Sadhu, A.; Liu, K. Towards damage detection using blind source separation integrated with time-varying auto-regressive modeling. Smart Mater. Struct. 2015, 25, 15013. [Google Scholar] [CrossRef]
- Cavalcante, C.C.; Filho, D.Z.; Romano, J.M.T. Multiuser processing using blind source separation methods. Eur. Trans. Telecommun. 2008, 19, 827–836. [Google Scholar] [CrossRef]
- Ma, B.; Zhang, T. Single-channel blind source separation for vibration signals based on TVF-EMD and improved SCA. IET Signal Process. 2020, 14, 259–268. [Google Scholar] [CrossRef]
- Nordhausen, K.; Fischer, G.; Filzmoser, P. Blind Source Separation for Compositional Time Series. Math. Geosci. 2020, 53, 905–924. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. SIGMOBILE Mob. Comput. Commun. Rev. 2001, 5, 3–55. [Google Scholar] [CrossRef]
- Thuraisingham, R.A. Estimating Electroencephalograph Network Parameters Using Mutual Information. Brain Connect. 2018, 8, 311–317. [Google Scholar] [CrossRef]
- Afshani, F.; Shalbaf, A.; Shalbaf, R.; Sleigh, J. Frontal–temporal functional connectivity of EEG signal by standardized permutation mutual information during anesthesia. Cogn. Neurodyn. 2019, 13, 531–540. [Google Scholar] [CrossRef]
- Ren, F.; Dong, Y.; Wang, W. Emotion recognition based on physiological signals using brain asymmetry index and echo state network. Neural Comput. Appl. 2019, 31, 4491–4501. [Google Scholar] [CrossRef]
- Tafreshi, T.F.; Daliri, M.R.; Ghodousi, M. Functional and effective connectivity based features of EEG signals for object recognition. Cogn. Neurodyn. 2019, 13, 555–566. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Himberg, J.; Hyvärinen, A.; Esposito, F. Validating the independent components of neuroimaging time series via clustering and visualization. NeuroImage 2004, 22, 1214–1222. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.P. Methodologies and Applications of Weak Signal Detection Based on Blind Source Separation; Chongqing University: Chongqing, China, 2014. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Gers, F.A. Learning to forget: Continual prediction with LSTM. In Proceedings of the 9th International Conference on Artificial Neural Networks: ICANN ’99, Edinburgh, UK, 7–10 September 1999; IEEE: Piscataway NJ, USA, 1999; Volume 1999, pp. 850–855. [Google Scholar]
- Li, A.J.; Khoo, S.; Lyamin, A.V.; Wang, Y. Rock slope stability analyses using extreme learning neural network and terminal steepest descent algorithm. Autom. Constr. 2016, 65, 42–50. [Google Scholar] [CrossRef]
- Goncalves, P.; Rilling, G.; Flandrin, P. On empirical mode decomposition and its algorithms. In Proceedings of the IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing, Baltimore, MD, USA, 3–6 June 2003; Volume 3, pp. 8–11. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Set (Group) | Test Set (Group) | |
|---|---|---|
| Pile-driving signals | 13,184 (original signal) | 1220 (separation signal) |
| Train operational signals | 23,832 (original signal) | 5760 (separation signal) |
| Others (noise, etc.) | 8229 (original signal) | 2057 (original signal) |
| Feature | Equation | Feature | Equation |
|---|---|---|---|
| Mean value | Kurtosis factor | ||
| Standard deviation | Pulse factor | ||
| Kurtosis | Clearance factor | ||
| Root mean square | Waveform center | ||
| Wave form factor | Time width | ||
| Peak factor | Mean square frequency | ||
| Center frequency | Root mean square frequency | ||
| Frequency variance | Frequency standard deviation |
| Search Parameters | |||
|---|---|---|---|
| Search range of learning rate | [0, 1) | Iteration step for learning rate | 0.01 |
| Search range of calculation layers | [1, 3) | Number of calculation layers in each search step | 1 |
| Search range of hidden layer nodes | [1, 100) | Number of hidden layer nodes in each search step | 10 |
| Search results | |||
| Optimal learning rate | 0.1 | Optimal number of hidden layer nodes | 10 |
| Optimal number of computing layers | 2 | Optimal accuracy | 94.68% |
| Search Parameters | |||
|---|---|---|---|
| Search range of learning rate | [0, 1) | Iteration step for learning rate | 0.01 |
| Search range of calculation layers | [1, 3) | Number of calculation layers in each search step | 1 |
| Search range of hidden layer nodes | [1, 100) | Number of hidden layer nodes in each search step | 10 |
| Search results | |||
| Optimal number of computing layers | 2 | Optimal accuracy | 91.25% |
| Optimal number of hidden layer nodes | 50 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.; Gui, Y.; Wang, X.; Xie, X. Three-Level Distributed Real-Time Monitoring of Construction near Underground Infrastructure Using a Combined Intelligent Method. Sensors 2022, 22, 3260. https://doi.org/10.3390/s22093260
Zhou B, Gui Y, Wang X, Xie X. Three-Level Distributed Real-Time Monitoring of Construction near Underground Infrastructure Using a Combined Intelligent Method. Sensors. 2022; 22(9):3260. https://doi.org/10.3390/s22093260
Chicago/Turabian StyleZhou, Biao, Yingbin Gui, Xiaojian Wang, and Xiongyao Xie. 2022. "Three-Level Distributed Real-Time Monitoring of Construction near Underground Infrastructure Using a Combined Intelligent Method" Sensors 22, no. 9: 3260. https://doi.org/10.3390/s22093260