
FPGA-Based Autonomous GPS-Disciplined Oscillatorsfor Wireless Sensor Network Nodes

Abstract
:1. Introduction
2. Related Works
3. System Model
3.1. Kalman Filter Design
3.2. Adaptive Algorithm
4. Hardware Implementation
4.1. Autonomous GPS-Disciplined Oscillator
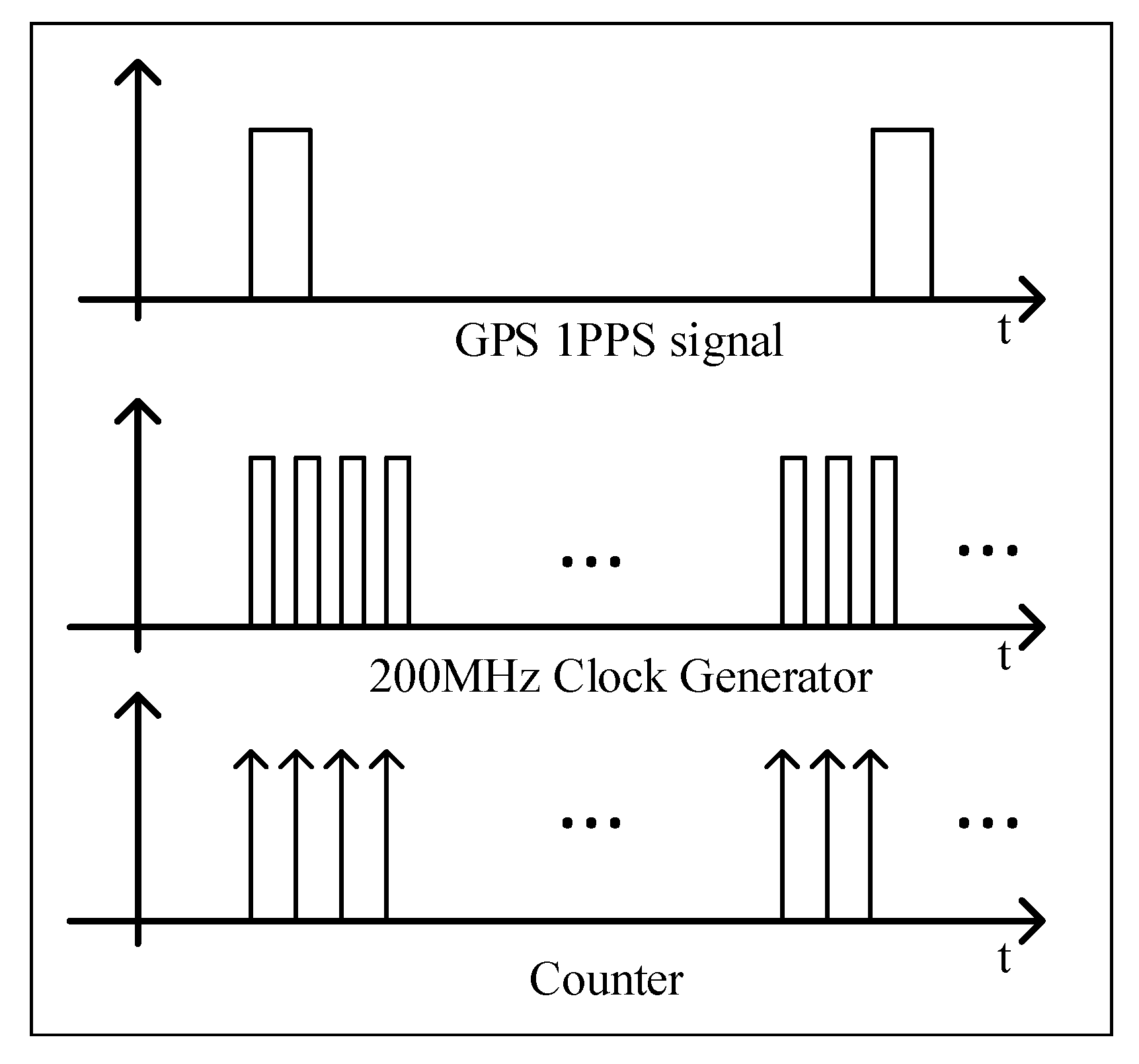
- FPGA chip: The Spartan 7 XC7S25-1CSGA225C device in 225-pin BGA, which includes 3650 slices containing 4 6-input LUTs and 8 flip-flops each, was chosen for its small size and being powerful enough for software development. An internal clock frequency of 450 MHz was used to generate a 200 MHz clock for the counter.
- GNSS module: In this project, we used the ZED-F9P module, which provides multi-band GNSS to high-volume industrial applications in a compact form factor. ZED-F9P is a multi-band GNSS module with an integrated u-blox multi-band RTK technology for centimeter-level accuracy. The module enables precise navigation and automation of moving industrial machinery by means of a small, surface-mounted module. The ZED-F9P GNSS module has a serial data communication interface, a timing pulse connected to the FPGA, and serial communication.
- Temperature sensor: This board has an integrated temperature sensor to monitor the board temperature. The sensor collects temperature data and communicates to the FPGA chip using I2C communication.
- Voltage-controlled temperature-compensated crystal oscillator (VC-TCXO): A low-cost and low-accuracy oscillator was used to generate a 10MHz frequency signal.
4.1.1. MicroBlaze
4.1.2. AXI Connection
4.1.3. Peripheral Module
4.1.4. Counter Module/Data Acquisition Module
4.2. External Hardware Devices
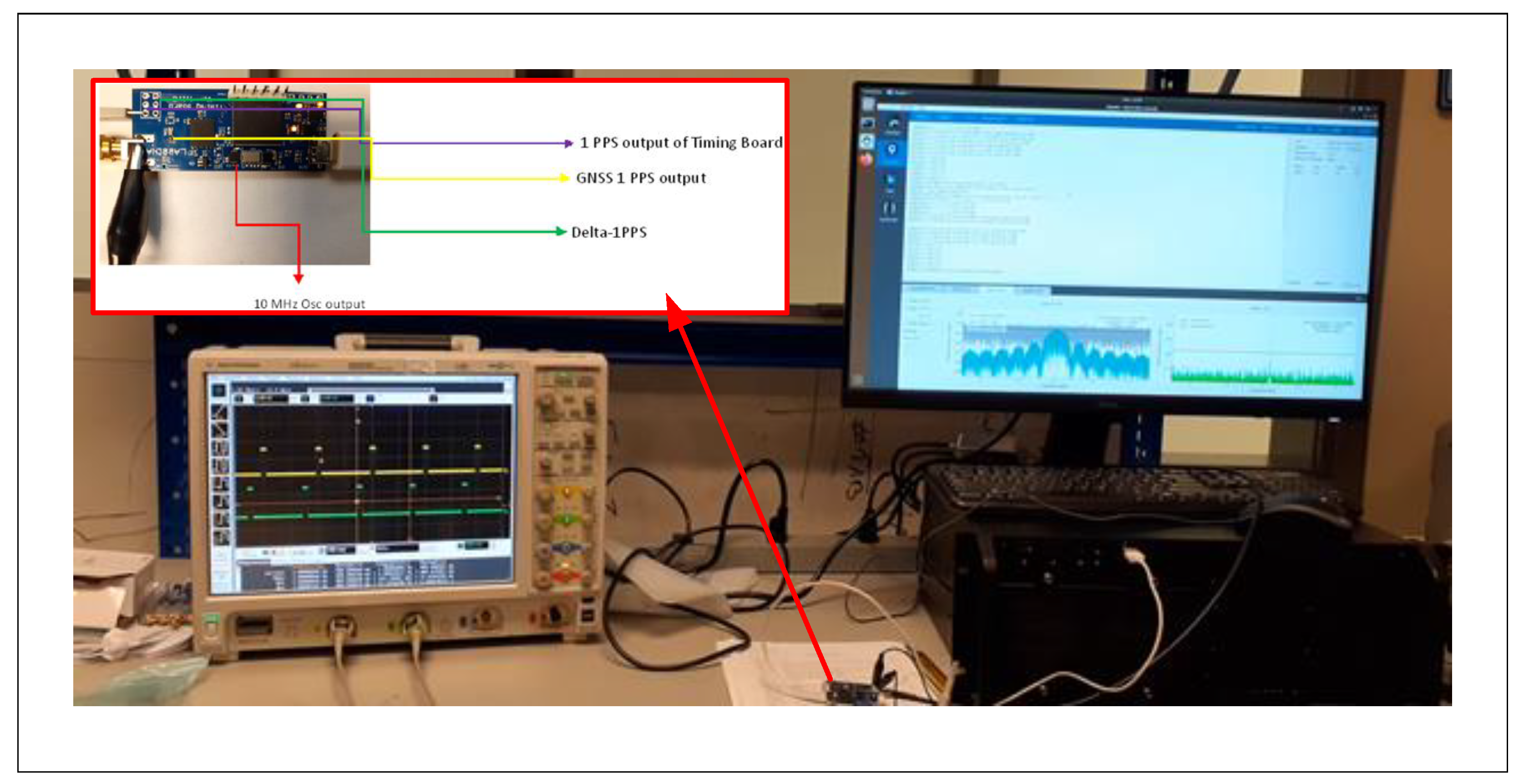
- Computer: The AGPSDO device also can be connected directly to a computer. The data were collected from the AGPSDO device and transferred to the computer using the UART protocol. On the computer, MATLAB Simulink was used for signal processing and displaying and plotting the data. The temperature and values were collected in real-time.
- Oscilloscope: The digital storage oscilloscope is a useful device to observe analog and digital signals. Moreover, the difference between 1PPS signals was captured and stored.
5. Measuring Oscillator Frequency
6. Experimental Results
6.1. Clock Synchronization
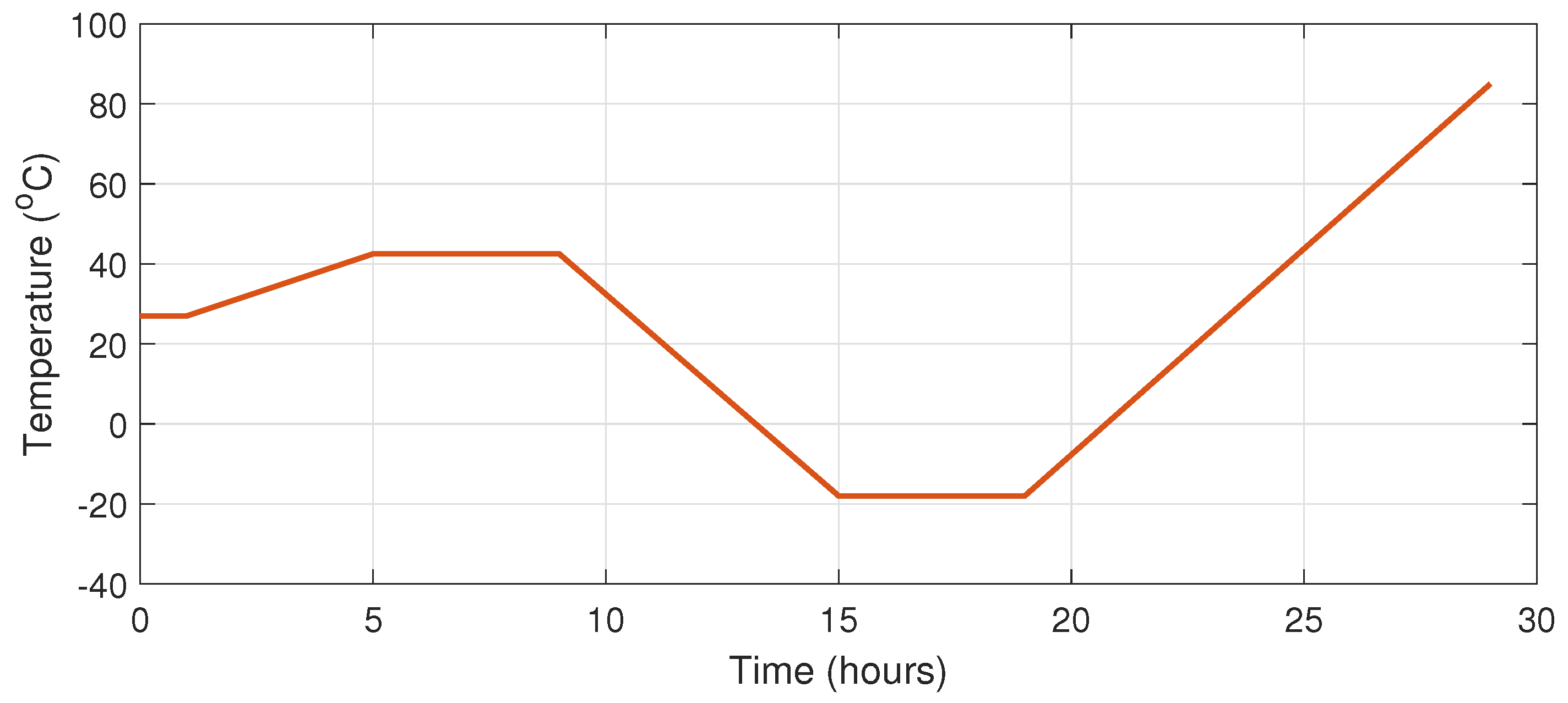
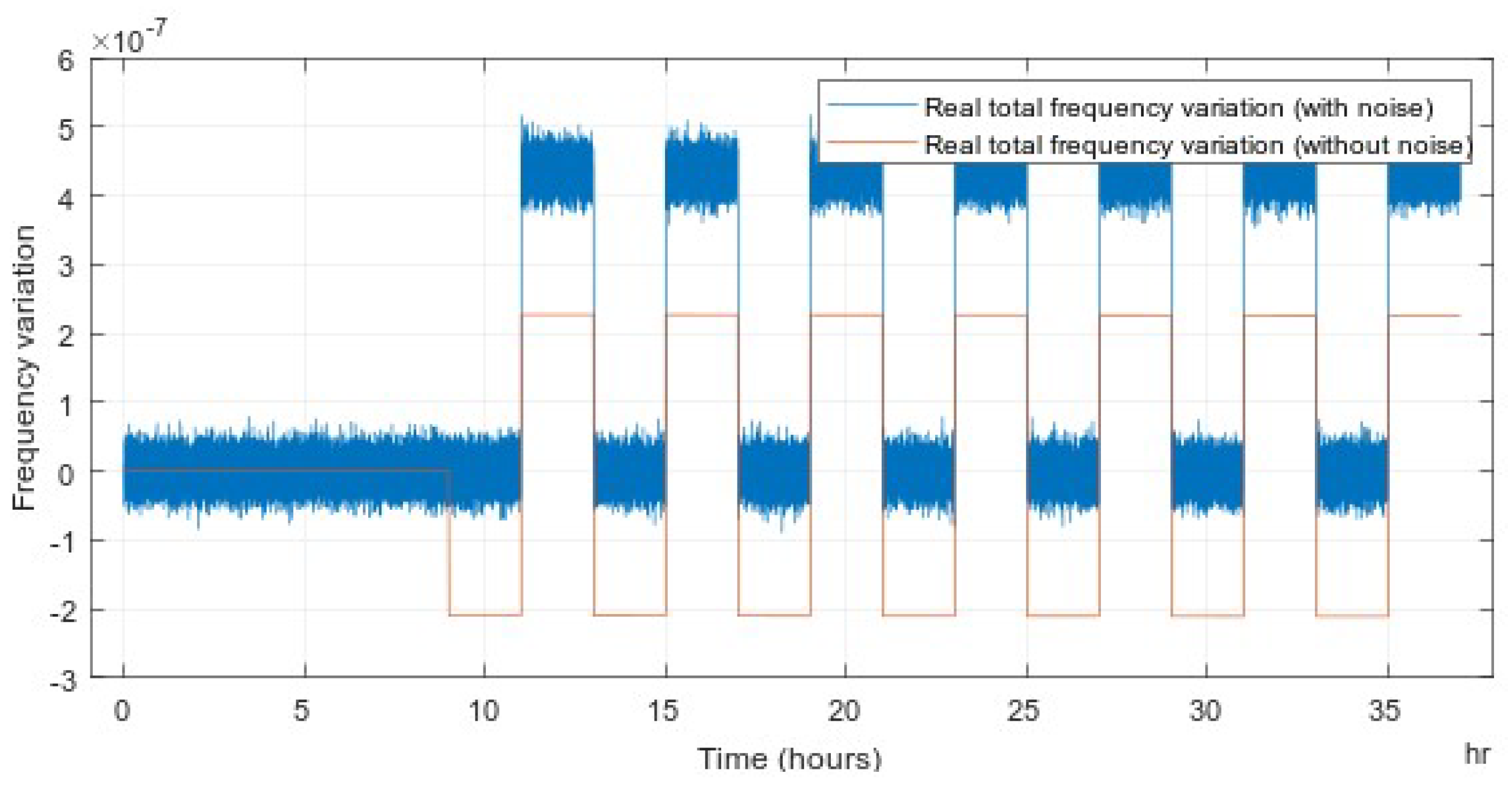
6.2. Temperature Dependency of Frequency
6.3. Measurement Results
6.3.1. Indoor Experimental Result
6.3.2. Outdoor Experimental Result
6.4. Comparison to the Reference Boards
6.5. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, Y.; Walter, C.P. Retrace and disciplining time constant effects on holdover clock drifts in chip-scale atomic clock. In Proceedings of the 2017 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Besancon, France, 9–13 July 2017; IEEE: Besancon, France, 2017; pp. 310–314. [Google Scholar]
- Cortés, I.; van der Merwe, J.R.; Lohan, E.S.; Nurmi, J.; Felber, W. Performance Evaluation of Adaptive Tracking Techniques with Direct-State Kalman Filter. Sensors 2022, 22, 420. [Google Scholar] [CrossRef] [PubMed]
- Sandenbergh, J.; Inggs, M. Synchronizing network radar using all-in-view GPS-disciplined oscillators. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE: Seattle, WA, USA, 2017; pp. 1640–1645. [Google Scholar]
- Zhao, X.; Laverty, D.M.; McKernan, A.; Morrow, D.J.; McLaughlin, K.; Sezer, S. GPS-Disciplined Analog-to-Digital Converter for Phasor Measurement Applications. IEEE Trans. Instrum. Meas. 2017, 66, 2349–2357. [Google Scholar] [CrossRef] [Green Version]
- Ng, Y.; Gao, G.X. GNSS Multireceiver Vector Tracking. IEEE Trans. Aerosp. Electron. Syst. 2020, 53, 2583–2593. [Google Scholar] [CrossRef]
- Abosekeen, A.; Noureldin, A.; Korenberg, M.J. Improving the RISS/GNSS Land-Vehicles Integrated Navigation System Using Magnetic Azimuth Updates. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1250–1263. [Google Scholar] [CrossRef]
- Uzun, A.; Ghani, F.A.; Yenigün, H.; Tekin, İ. A Novel GNSS Repeater Architecture for Indoor Positioning Systems in ISM Band. In Proceedings of the 2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, Toronto, ON, Canada, 5–10 July 2020; pp. 1631–1632. [Google Scholar] [CrossRef]
- Bauer, J.; Andrich, C.; Ihlow, A.; Beuster, N.; del Galdo, G. Characterization of GPS Disciplined Oscillators Using a Laboratory GNSS Simulation Testbed. In Proceedings of the 2020 Joint Conference of the IEEE International Frequency Control Symposium and International Symposium on Applications of Ferroelectrics (IFCS-ISAF), Keystone, CO, USA, 19–23 July 2020; IEEE: Keystone, CO, USA, 2020; pp. 1–4. [Google Scholar]
- Yu, F.; Ma, X.; Wang, Z. Design of high precision time synchronization system based on GPS/BD dual mode. In Proceedings of the Proceedings of the 2016 6th International Conference on Mechatronics, Computer and Education Informationization (MCEI 2016), Shenyang, China, 11–13 November 2016; Atlantis Press: Shenyang, China, 2016. [Google Scholar]
- Sayed, A.; Tarighat, A.; Khajehnouri, N. Network-based wireless location: Challenges faced in developing techniques for accurate wireless location information. IEEE Signal Processing Mag. 2005, 22, 24–40. [Google Scholar] [CrossRef]
- C.W.T. Nicholls, G.C. Adaptive OCXO drift correction algorithm. In Proceedings of the 2004 IEEE International Frequency Control Symposium and Exposition, Montreal, QC, Canada, 23–27 August 2004; IEEE: Montreal, QC, Canada, 2004; pp. 509–517. [Google Scholar]
- Arceo-Miquel, L.; Shmaliy, Y.; Ibarra-Manzano, O. Optimal Synchronization of Local Clocks by GPS 1PPS Signals Using Predictive FIR Filters. IEEE Trans. Instrum. Meas. 2009, 58, 1833–1840. [Google Scholar] [CrossRef]
- Li, Y.; Hua, Y.; Yan, B.; Guo, W. Research on the eLoran Differential Timing Method. Sensors 2020, 20, 6518. [Google Scholar] [CrossRef] [PubMed]
- Allan, D.W.; Gray, J.E.; Machlan, H.E. The National Bureau of Standards Atomic Time Scales: Generation, Dissemination, Stability, and Accuracy. IEEE Trans. Instrum. Meas. 1972, 21, 388–391. [Google Scholar] [CrossRef] [Green Version]
- Lombardi, M. The Use of GPS Disciplined Oscillators as Primary Frequency Standards for Calibration and Metrology Laboratories. NCSLI Meas. 2008, 3, 56–65. [Google Scholar] [CrossRef]
- Boehmer, T.; Bilén, S. Low-Power GPS-Disciplined Oscillator Module for Distributed Wireless Sensor Nodes. Electronics 2021, 10, 716. [Google Scholar] [CrossRef]
- Koo, K.Y.; Hester, D.; Kim, S. Time Synchronization for Wireless Sensors Using Low-Cost GPS Module and Arduino. Front. Built Environ. 2019, 4, 3–4. [Google Scholar] [CrossRef] [Green Version]
- Bauer, J.; Andrich, C.; Ihlow, A.; Beuster, N.; del Galdo, G. Characterizing GPS Disciplined Oscillators for Distributed Vehicle-to-X Measurement Applications. In Proceedings of the 2020 Joint Conference of the IEEE International Frequency Control Symposium and International Symposium on Applications of Ferroelectrics (IFCS-ISAF), Keystone, CO, USA, 19–23 July 2020; pp. 1–4. [Google Scholar]
- Niu, X.; Yan, K.; Zhang, T.; Zhang, Q.; Zhang, H.; Liu, J. Quality evaluation of the pulse per second (PPS) signals from commercial GNSS receivers. GPS Solut. 2015, 19, 141–150. [Google Scholar] [CrossRef]
- Li, H.; Zhang, X.; Li, Z.; Pan, H.; Mao, W.; Yan, Y.; Yu, B.; Tang, J. A Novel High-Precision Method Based on Sequence Weighted Adaptive Unscented Kalman Filter for GPS Disciplined Crystal Oscillator. In Proceedings of the 2020 12th IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Nanging, China, 20–23 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Pawłowski, E. Method and system for disciplining a local reference oscillator by GPS 1PPS signal. Pzreglad Elektrotechniczny 2018, 1, 40–43. [Google Scholar] [CrossRef]
- Choi, Y.S.; Choi, H.H.; Kwon, T.H. An adaptive bandwidth phase locked loop with locking status indicator. In Proceedings of the 9th Russian-Korean International Symposium on Science and Technology, Novosibirsk, Russia, 26 June–2 July 2005; pp. 826–829. [Google Scholar] [CrossRef]
- Cheng, C.L.; Chang, F.R.; Tu, K.Y. Highly accurate real-time GPS carrier phase-disciplined oscillator. IEEE Trans. Instrum. Meas. 2005, 54, 819–824. [Google Scholar] [CrossRef]
- Thoröd, P. Firmware for synchronizing Chip-Scale Atomic Clock to GPS Enabling precise and accurate synchronization, and timekeeping, in distributed underwater sensor networks. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2015. [Google Scholar]
- Vyskocil, P.; Sebesta, J. Relative timing characteristics of GPS timing modules for time synchronization application. In Proceedings of the 2009 International Workshop on Satellite and Space Communications, Siena-Tuscany, Italy, 9–11 September 2009; pp. 230–234. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurements | GPS ON | GPS OFF | GPS OFF | GPS OFF | GPS OFF | GPS OFF | GPS OFF |
|---|---|---|---|---|---|---|---|
| Hold-Over | Hold-Over | Hold-Over | Hold-Over | Hold-Over | Hold-Over | ||
| Mean Time | Min. Time | Max. Time | Mean Time | Min. Time | Max. Time | Mean Time | |
| (Start of 1 h) | (End of 1 h) | (End of 1 h) | (End of 1 h) | (End of 24 h) | (End of 24 h) | (End of 24 h) | |
| 1PPS GPS (ms) | 999.999397 | — | — | — | — | — | — |
| 1PPS AGPSDO (ms) | 999.999341 | 999.998973 | 999.998901 | 999.999347 | 999.999419 | 999.999597 | 999.999609 |
| PPS (ms) | 0.000020 | 0.000042 | 0.000050 | 0.000072 | 0.000068 | 0.000080 | |
| (0.002 s) | (0.042 s) | (0.005 s) | (0.072 s) | (0.068 s) | (0.080 s) |
| Measurements | GPS ON | GPS OFF | GPS OFF | GPS OFF | GPS OFF | GPS OFF | GPS OFF |
|---|---|---|---|---|---|---|---|
| Hold-Over | Hold-Over | Hold-Over | Hold-Over | Hold-Over | Hold-Over | ||
| Mean Time | Min. Time | Max. Time | Mean Time | Min. Time | Max. Time | Mean Time | |
| (Start of 1 h) | (End of 1 h) | (End of 1 h) | (End of 1 h) | (End of 24 h) | (End of 24 h) | (End of 24 h) | |
| 1PPS GPS (ms) | 999.999397 | — | — | — | — | — | — |
| 1PPS AGPSDO (ms) | 999.999341 | 999.998973 | 999.998901 | 999.999347 | 999.999419 | 999.999597 | 999.999609 |
| 1PPS (ms) | 0.000020 | 0.000042 | 0.000050 | 0.000072 | 0.000068 | 0.000080 | |
| (0.002 s) | (0.042 s) | (0.005 s) | (0.072 s) | (0.068 s) | (0.080 s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bui, T.Q.T.; Elango, A.; Landry, R.J. FPGA-Based Autonomous GPS-Disciplined Oscillatorsfor Wireless Sensor Network Nodes. Sensors 2022, 22, 3135. https://doi.org/10.3390/s22093135
Bui TQT, Elango A, Landry RJ. FPGA-Based Autonomous GPS-Disciplined Oscillatorsfor Wireless Sensor Network Nodes. Sensors. 2022; 22(9):3135. https://doi.org/10.3390/s22093135
Chicago/Turabian StyleBui, Toan Quang The, Arul Elango, and René Jr. Landry. 2022. "FPGA-Based Autonomous GPS-Disciplined Oscillatorsfor Wireless Sensor Network Nodes" Sensors 22, no. 9: 3135. https://doi.org/10.3390/s22093135