
A Novel Elastomer-Based Inclinometer for Ultrasensitive Bridge Rotation Measurement


Abstract
:1. Introduction
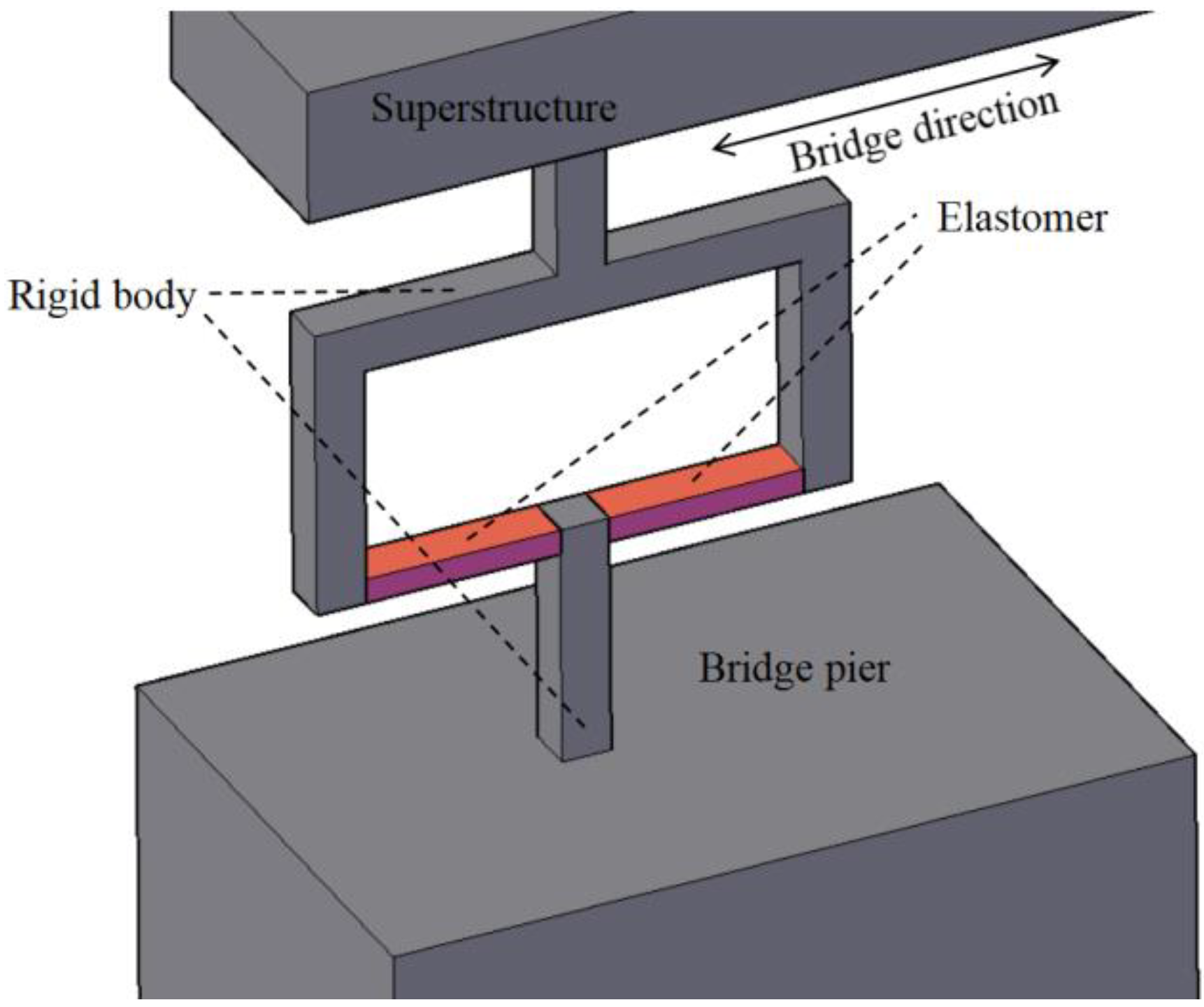
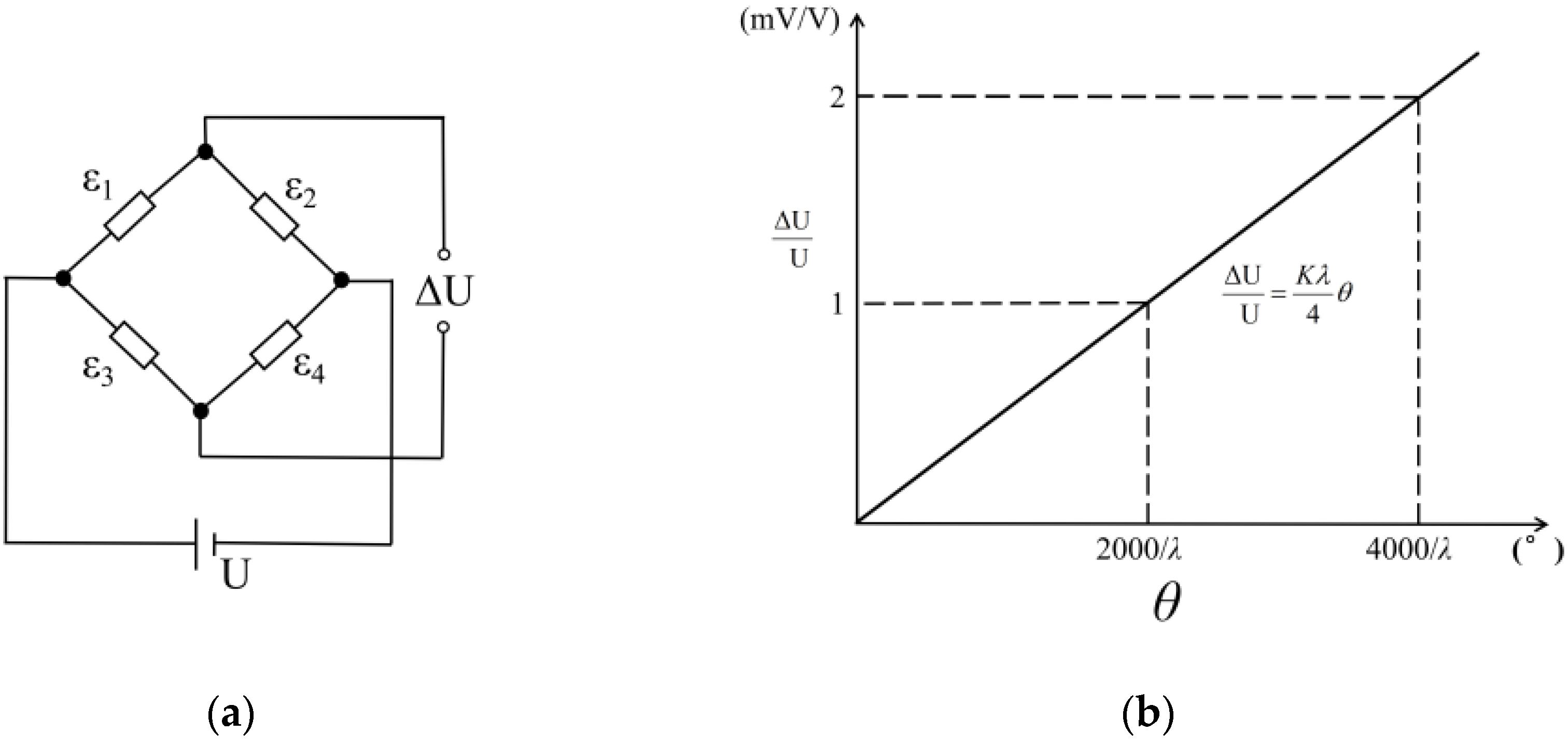
2. Working Principle of the Elastomer-Based Inclinometer
3. Design and Data Acquisition of the Proposed Inclinometer
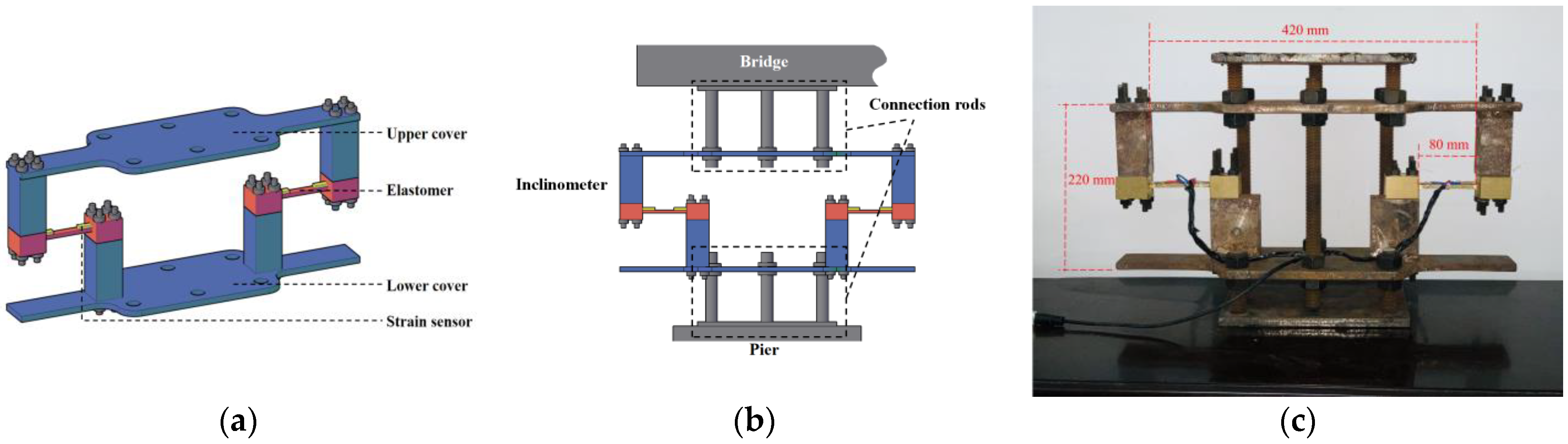
3.1. Design
3.2. Data Acquisition Module
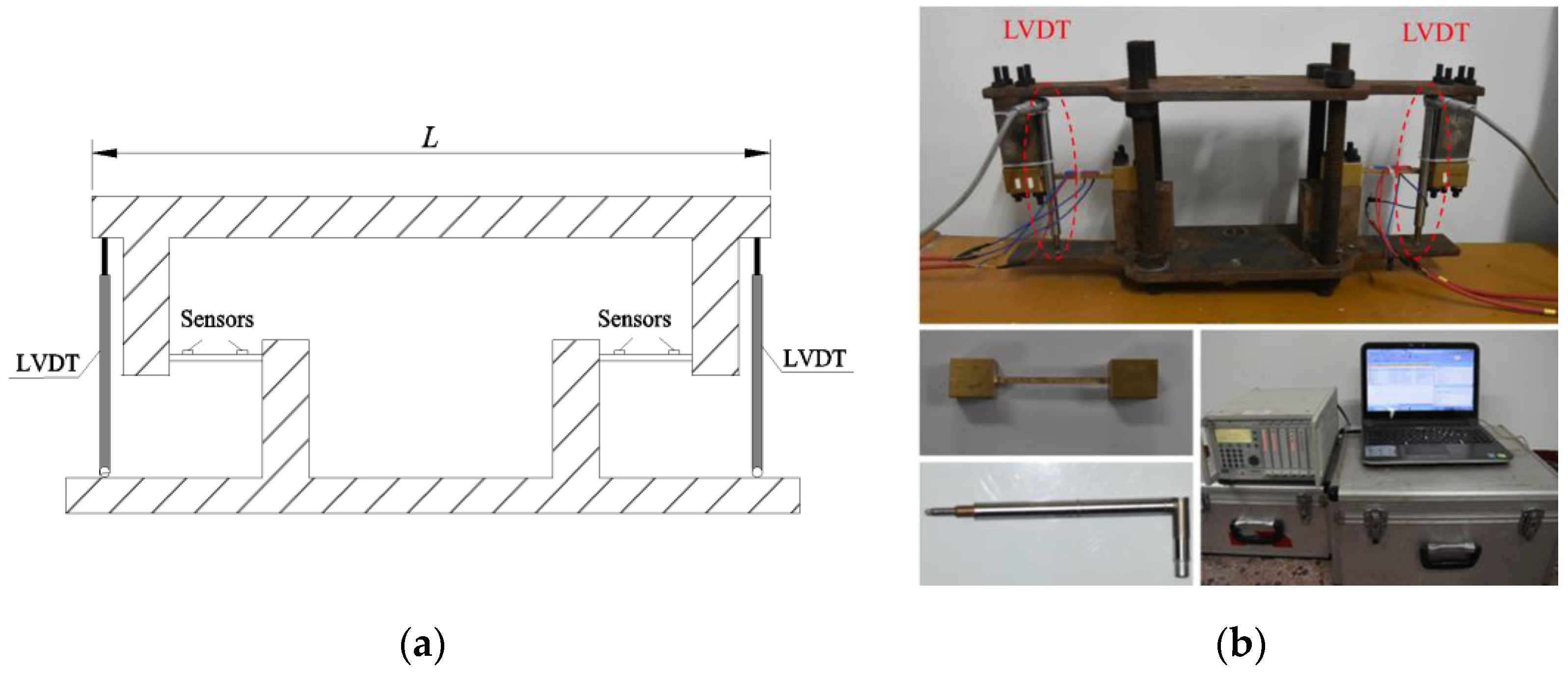
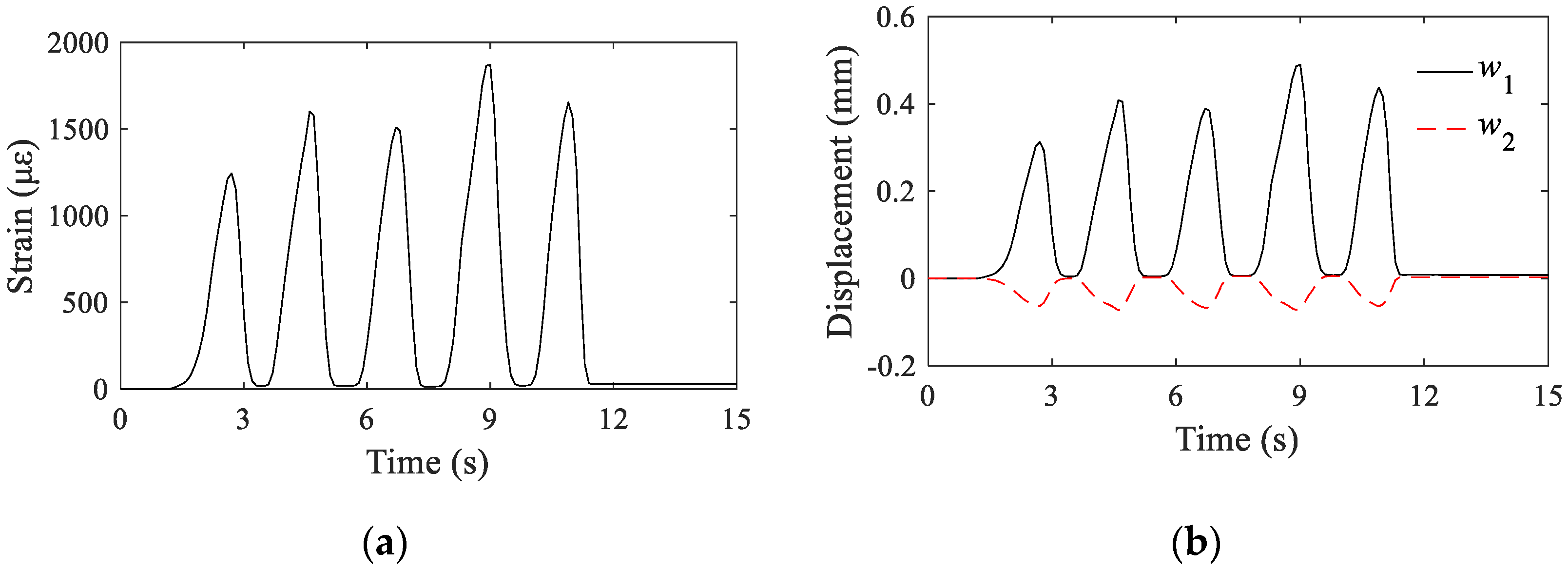
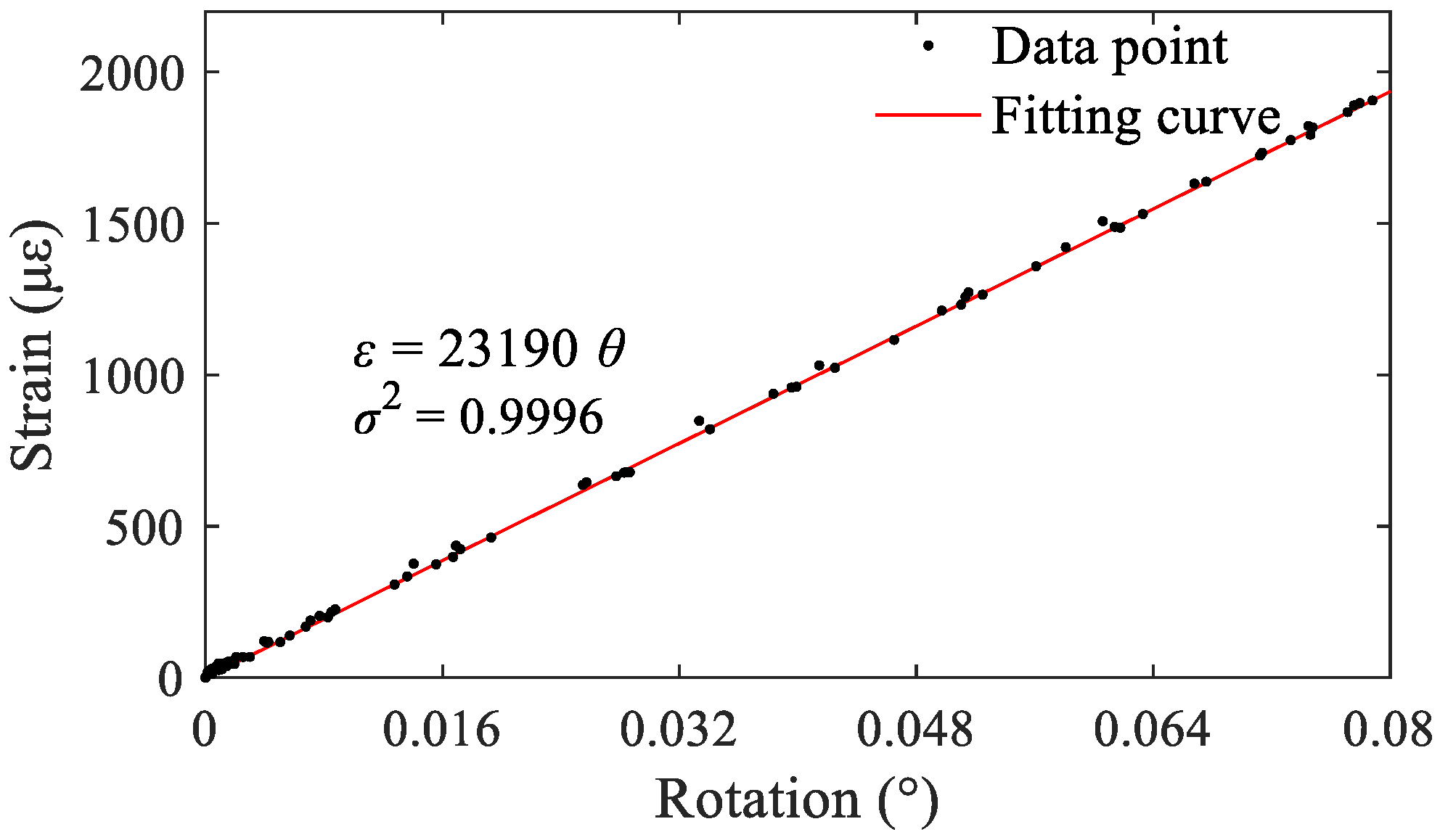
3.3. Calibration Test
4. Inclinometer Characteristic Parameters
4.1. Measurement Range
4.2. Measurement Accuracy
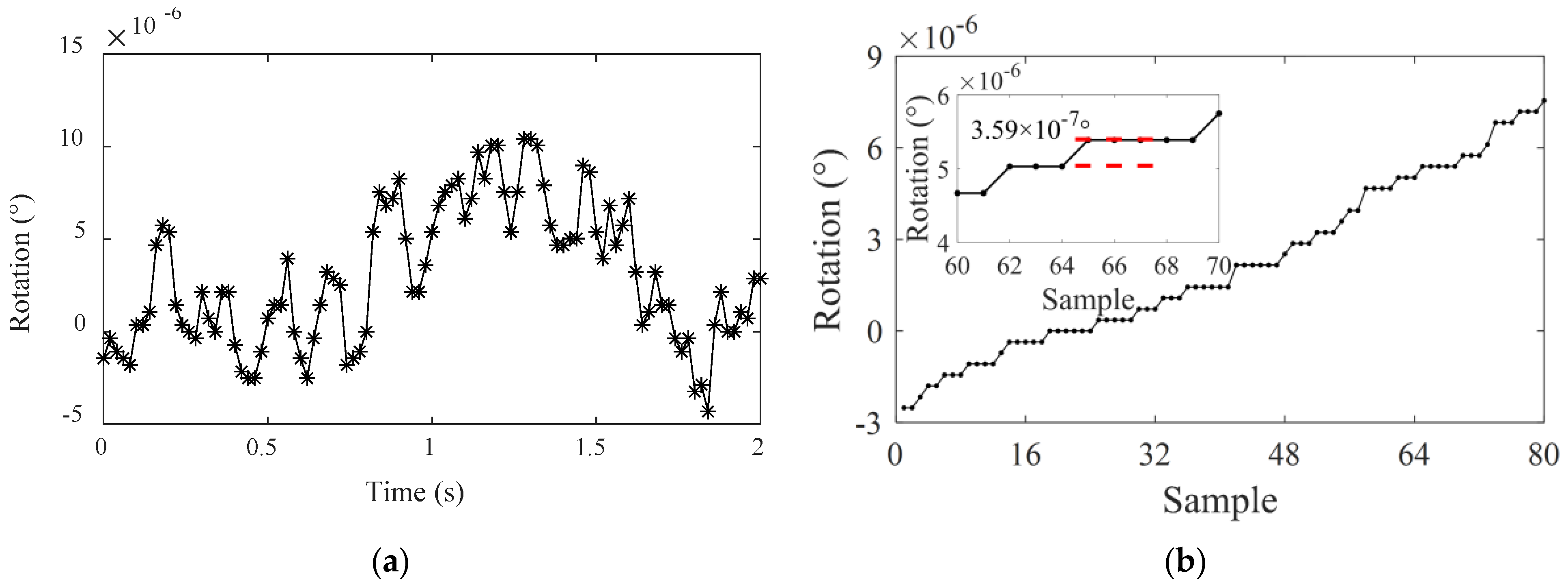
4.3. Measurement Resolution
4.4. Linearity and Repeatability
5. In-Situ Experiment
5.1. Experiment Overview
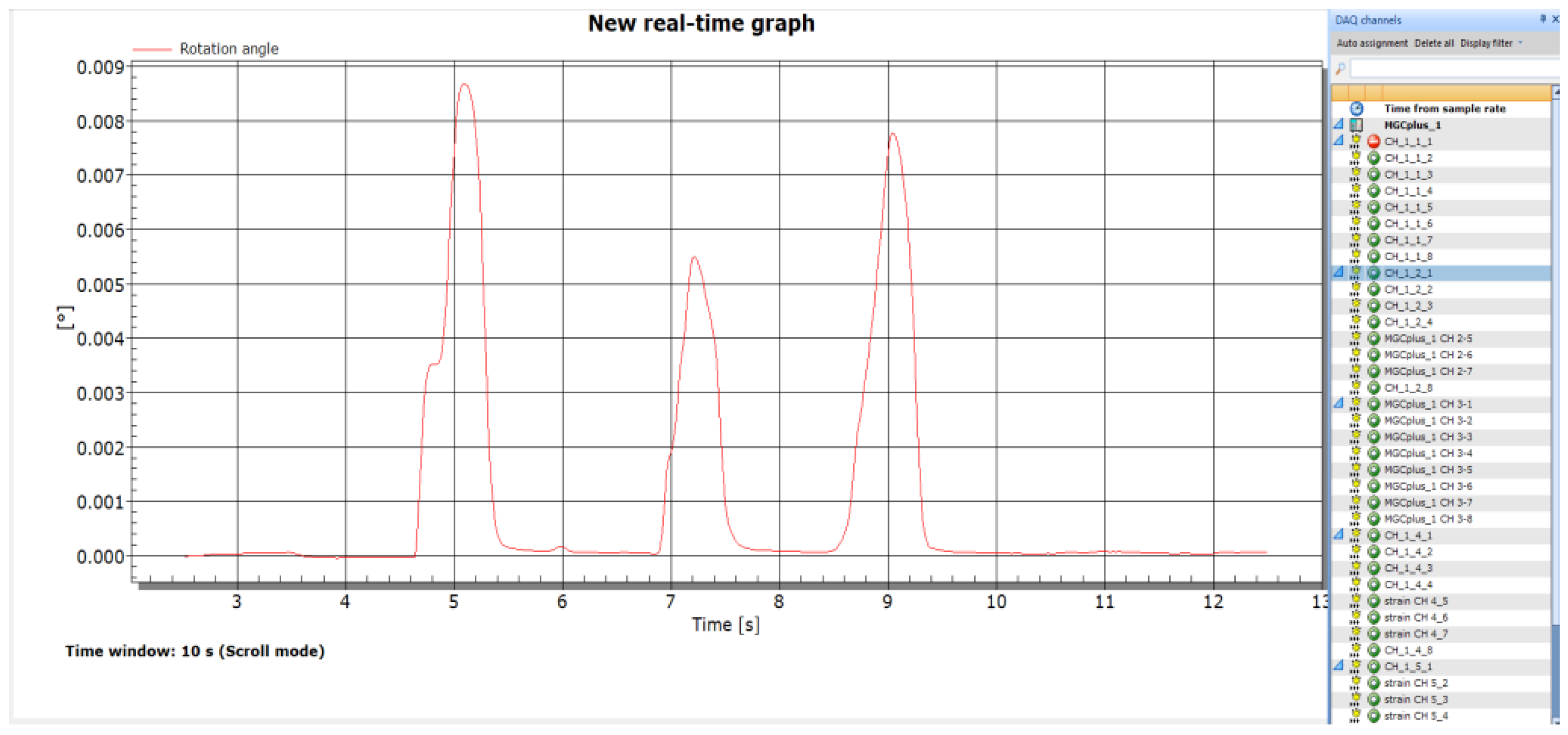
5.2. Results Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sangree, R.H.; Schafer, B.W. Field Experiments and Numerical Models for the Condition Assessment of Historic Timber Bridges: Case Study. J. Bridge Eng. 2008, 13, 595–601. [Google Scholar] [CrossRef]
- Xie, H.B.; Wang, Y.F.; Wu, H.L.; Li, Z. Condition assessment of existing RC highway bridges in China based on SIE2011. J. Bridge Eng. 2014, 19, 39–48. [Google Scholar] [CrossRef]
- American Association of State Highway and Transportation Officials (AASHTO). The Manual for Bridge Evaluation, 2nd ed.; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2011. [Google Scholar]
- Ministry of Communications and Transportation. Specification for Inspection and Evaluation of Load-Bearing Capacity of Highway Bridges; Research Institute of Highway Ministry of Transport: Beijing, China, 2011. [Google Scholar]
- Wang, N.B.; Shen, W.; Guo, C.R.; Wan, H.P. Moving load test-based rapid bridge capacity evaluation through actual influence line. Eng. Struct. 2021, 252, 0141–0296. [Google Scholar] [CrossRef]
- Wang, N.B.; Ren, W.X.; Huang, T.L. Baseline-free damage detection method for beam structures based on an actual influence line. Smart Struct. Syst. 2019, 24, 475–490. [Google Scholar]
- Li, J.; Hao, H. Damage detection of shear connectors under moving loads with relative displacement measurements. Mech. Syst. Signal Process. 2015, 60–61, 124–150. [Google Scholar] [CrossRef]
- Zhang, W.W.; Li, J.; Hao, H.; Ma, H.W. Damage detection in bridge structures under moving loads with phase trajectory change of multi-type vibration measurements. Mech. Syst. Signal Process. 2017, 87, 410–425. [Google Scholar] [CrossRef]
- Mayunga, S.D.; Bakaone, M. Dynamic deformation monitoring of lotsane bridge using global positioning systems (GPS) and linear variable differential transducers (LVDT). J. Data Anal. Inf. Process. 2021, 9, 21. [Google Scholar] [CrossRef]
- Zhang, G.W.; Wu, Y.Y.; Zhao, W.J.; Zhang, J. Radar-based multipoint displacement measurements of a 1200-m-long suspension bridge. ISPRS J. Photogramm. 2020, 167, 71–84. [Google Scholar] [CrossRef]
- Yu, J.Y.; Zhu, P.; Xu, B.; Meng, X.L. Experimental assessment of high sampling-rate robotic total station for monitoring bridge dynamic responses. Measurement 2017, 104, 60–69. [Google Scholar] [CrossRef]
- Chen, Z.S.; Zhang, C.; Wang, X.; Ma, C.M. Wind tunnel measurements for flutter of a long-afterbody bridge deck. Sensors 2017, 17, 335. [Google Scholar] [CrossRef] [Green Version]
- Long, T.; Pan, B. Remote bridge deflection measurement using an advanced video deflectometer and actively illuminated LED targets. Sensors 2016, 16, 1344. [Google Scholar]
- Zhu, J.; Zhang, C.; Lu, Z.; Li, X. A multi-resolution deep feature framework for dynamic displacement measurement of bridges using vision-based tracking system. Measurement 2021, 183, 109847. [Google Scholar] [CrossRef]
- Meng, X.L.; Nguyen, D.; Xie, Y.L.; Owen, J.; Psimoulis, P.; Ince, S.; Chen, Q.S.; Ye, J.; Bhatia, P. Design and implementation of a new system for large bridge monitoring—GeoSHM. Sensors 2018, 18, 775. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiong, C.; Lu, H.L.; Zhu, J.S. Operational modal analysis of bridge structures with data from GNSS/accelerometer measurements. Sensors 2017, 17, 436. [Google Scholar] [CrossRef] [Green Version]
- Xie, T.; Wang, X.; Li, C.; Tian, S.H.; Zhao, Z.G.; Li, Y.N. Fiber bragg grating differential tilt sensor based on mercury column piston structure. Acta Opt. Sin. 2017, 37, 170–176. [Google Scholar]
- Chuan, C.S.; Wang, K.D. Inclination sensing characteristic using magnetic fluids. J. Shanghai Jiaotong Univ. 2014, 48, 1183–1188. [Google Scholar]
- Hidehiko, S.; Takeshi, K.; Chitoshi, M. Determination method of bridge rotation angle response using mems imu. Sensors 2014, 16, 1882. [Google Scholar]
- Huseynov, F.; Kim, C.; Obriene, E.J.; Brownjohn, J.M.W.; Hester, D.; Chang, K.C. Bridge damage detection using rotation measurements-experimental validation. Mech. Syst. Signal Process. 2020, 135, 106380.1–106380.22. [Google Scholar] [CrossRef]
- Zhang, C.R.; Ge, Y.X.; Hu, Z.C.; Zhou, K.; Ren, G.F.; Wang, X.D. Research on deflection monitoring for long span cantilever bridge based on optical fiber sensing. Opt. Fiber Technol. 2019, 53, 102035. [Google Scholar] [CrossRef]
- Yu, H.Y.; Chen, X.L.; Ren, M.Y.; Yin, L.K.; Wu, Q.; Zhao, J.S.; Liu, Q. A coupled bend-twist deformation monitoring method based on inclination measurement and rational cubic spline fitting. Mech. Syst. Signal Process. 2021, 147, 107084. [Google Scholar] [CrossRef]
- Li, S.; Hu, W.B. A novel bridge curve mode measurement technique based on FOG. Optik—Int. J. Light Electron Opt. 2015, 126, 4175–4178. [Google Scholar] [CrossRef]
- Bertola, N.J.; Smith, I.F.C. A methodology for measurement-system design combining information from static and dynamic excitations for bridge load testing. J. Sound Vib. 2019, 463, 114953. [Google Scholar] [CrossRef]
- Zhai, H.; Qu, S.Y.; Wang, G.L. Research on the method of simply supported beam modal parameters recognition by QY inclinometer. J. Appl. Sci. 2014, 14, 1844–1850. [Google Scholar]
- Hoult, N.A.; Fidler, P.R.A.; Hill, P.G.; Middleton, G.R. Long-term wireless structural health monitoring of the Ferriby road bridge. J. Bridge Eng. 2010, 15, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Stöhr, R.; Rücker, W. Damage detection based on static measurements on bridge structures. In Proceedings of the IMAC-XXIV, Missouri, MO, USA, 1 June 2006. [Google Scholar]
- Alten, K.; Ralbovsky, M.; Vorwagner, A.; Toplitzer, H.; Wittmann, S. Evaluation of different monitoring techniques during damage infliction on structures. Procedia Eng. 2017, 199, 1840–1845. [Google Scholar] [CrossRef]
- Alamdari, M.M.; Kildashti, K.; Samali, B.; Goudarzi, H.V. Damage diagnosis in bridge structures using rotation influence line: Validation on a cable-stayed bridge. Eng. Struct. 2019, 185, 1–14. [Google Scholar] [CrossRef]
- Furinghetti, M.; Pavese, A.; Lunghi, F.; Silvestri, D. Strategies of structural health monitoring for bridges based on cloud computing. J. Civ. Struct. Health Monit. 2019, 9, 607–616. [Google Scholar] [CrossRef]
- Clemente, P.; Bongiovanni, G.; Buffarini, G.; Saitta, F. Structural health status assessment of a cable-stayed bridge by means of experimental vibration analysis. J. Civ. Struct. Health Monit. 2019, 9, 655–669. [Google Scholar] [CrossRef]
- Glii, B.; Posenato, D.; Inaudi, D.; Figini, A. Structural health monitoring method for curved concrete bridge box girders. Proc. SPIE—Int. Soc. Opt. Eng. 2008, 6932, 693204–693204-9. [Google Scholar]
- Liu, H.; Ou, J.P. The state of the art in structural health monitoring of cable-stayed bridges. J. Civ. Struct. Health Monit. 2015, 6, 1–25. [Google Scholar] [CrossRef]
- Priestley, M.J.N.; Park, R. Strength and ductility of concrete bridge column under seismic loading. Aci. Struct. J. 1987, 84, 61–76. [Google Scholar]
- Furinghetti, M.; Pavese, A. Definition of a simplified design procedure of seismic isolation systems for bridges. Struct. Eng. Int. 2020, 30, 381–386. [Google Scholar] [CrossRef]
- Wu, C.M.; Chuang, Y.T. Roll angular displacement measurement system with microradian accuracy. Sens. Actuators A Phys. 2004, 116, 145–149. [Google Scholar] [CrossRef]
- Wyler, A.G. Levelmatic 31—High Precision Analog Inclination Sensor Technical Specification. 2016. Available online: https://www.wylerag.com/fileadmin/pdf/manuel/Manual%20LEVELMATIC%2031.pdf (accessed on 10 March 2022).
- Bruns, D.G. An optically referenced inclinometer with sub-microradian repeatability. Rev. Sci. Instrum. 2017, 88, 115111. [Google Scholar] [CrossRef] [PubMed]
- Inaudi, D.; Glisic, B. Interferometric inclinometer for structural monitoring. In Proceedings of the 2002 15th Optical Fiber Sensors Conference Technical Digest Ofs IEEE, Portland, OR, USA, 10 May 2002. [Google Scholar]
- New Light FS64 | Tilt Sensor. Available online: https://www.hbm.com/cn/8122/newlight-fs64-optical-tilt-sensor (accessed on 2 March 2022).
- The Third Railway Survey and Design Institute Group Corporation. Specification for Design of High Speed Railway; China Railway Publishing House: Beijing, China, 2014. [Google Scholar]
- Japan Institute of Railway Comprehensive Technology. Railway Structure Design Criteria and Its Interpretation-Displacement Limits; Maruzen Co., Ltd. Publishing Division: Tokyo, Japan, 2004. [Google Scholar]
- HBM Launches Data Acquisition Amplifier Modules. Mainframe Computing. 2014. Available online: https://www.digitalengineering247.com/article/hbm-launches-new-data-acquisition-amplifier-modules/ (accessed on 10 March 2022).
- Dong, Y.G. Sensing Technology and Systems; Tsinghua University Press: Beijing, China, 2006. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Country of Origin | Measurement Range (°) | Resolution in Degrees (°) | Precision in Degrees (°) | Sampling Rate (Hz) |
|---|---|---|---|---|---|
| DNS | Germany | ±85 | 3 × 10−3 | ±3 × 10−2 | 100 |
| JDI 100 | USA | ±1 | 1 × 10−4 | ±4 × 10−3 | 125 |
| JN2101 | Germany | ±45 | 1 × 10−3 | ±1 × 10−2 | 20 |
| ACA2200 | Japan | ±0.5 | 1 × 10−4 | ±3 × 10−3 | 20 |
| ZERO-TRONIC | Switzerland | ±0.5 | 1 × 10−4 | ±3.5 × 10−4 | 10 |
| T935 | UK | ±1 | 6 × 10−5 | ±4 × 10−4 | 10 |
| No. | Component | Size/(mm) | Feature |
|---|---|---|---|
| 1 | Upper cover | 420 × 150 × 8 | Convert rotation to strain |
| 2 | Lower cover | 420 × 150 × 8 | Fix reference plane |
| 3 | Elastomer | 80 × 10 × 5 | Elastic sensitive element |
| 4 | Limit rod | Φ20 | Limit before test |
| 5 | Connection rods | 100 × 100 × 8 | Fix the device to the bridge |
| 6 | Strain gauge | 5 × 3 | Sensing elastic beam strain signal |
| Vehicle Size | Small | Medium | Large |
|---|---|---|---|
| Approx. vehicle weight (ton) | 2 | 4 | 35 |
| Rotation response (×10−4 (°)) | 3.2 | 6.2 | 46.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, D.; Wang, N.; Fu, C.; Guo, C.; Zhao, Y. A Novel Elastomer-Based Inclinometer for Ultrasensitive Bridge Rotation Measurement. Sensors 2022, 22, 2715. https://doi.org/10.3390/s22072715
Zhou D, Wang N, Fu C, Guo C, Zhao Y. A Novel Elastomer-Based Inclinometer for Ultrasensitive Bridge Rotation Measurement. Sensors. 2022; 22(7):2715. https://doi.org/10.3390/s22072715
Chicago/Turabian StyleZhou, De, Ningbo Wang, Chaofeng Fu, Chuanrui Guo, and Yangping Zhao. 2022. "A Novel Elastomer-Based Inclinometer for Ultrasensitive Bridge Rotation Measurement" Sensors 22, no. 7: 2715. https://doi.org/10.3390/s22072715