
Automatic Real-Time Pose Estimation of Machinery from Images


Abstract
:1. Introduction
1.1. Motivation
1.2. State of the Art
2. Methods
2.1. Camera Model
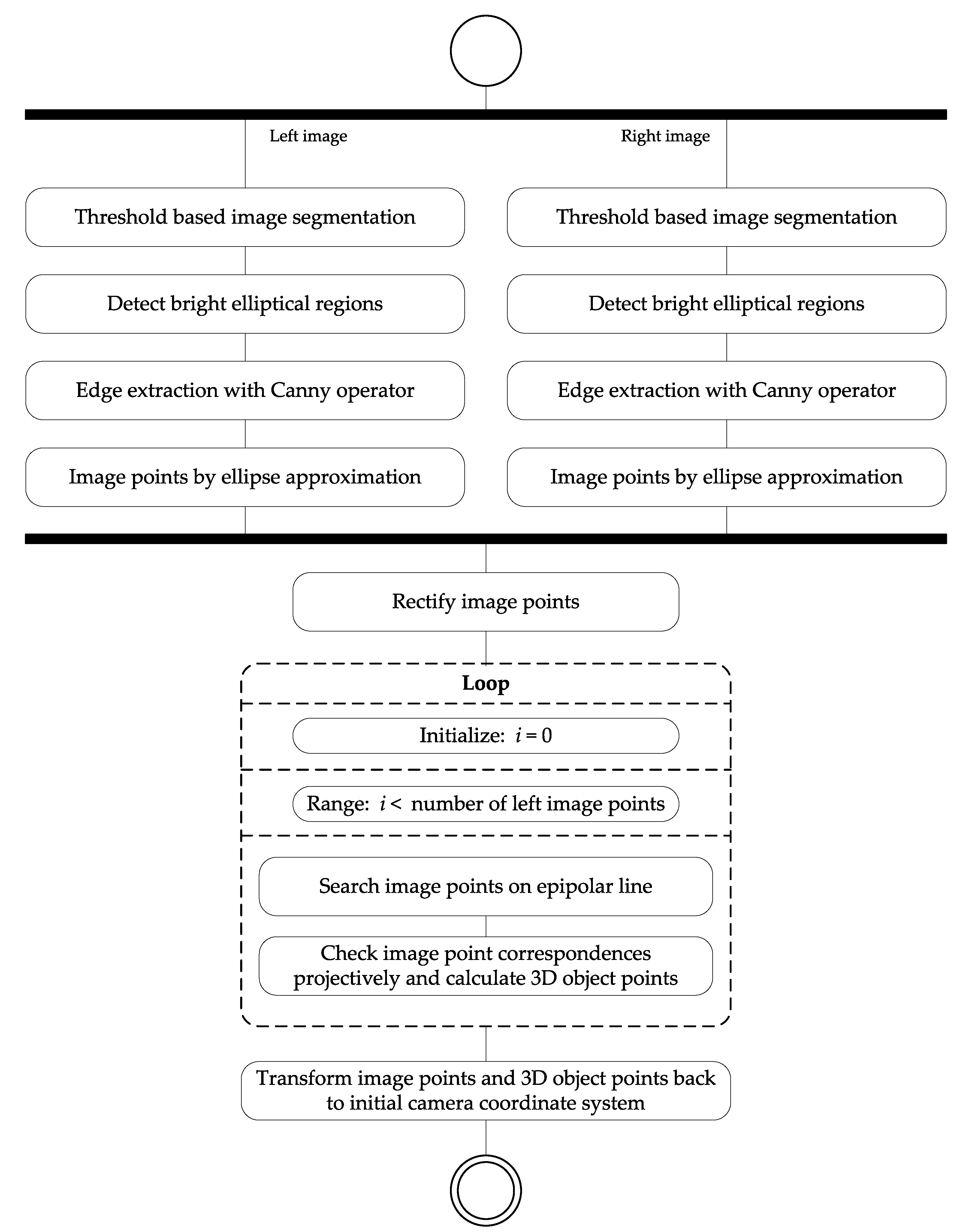
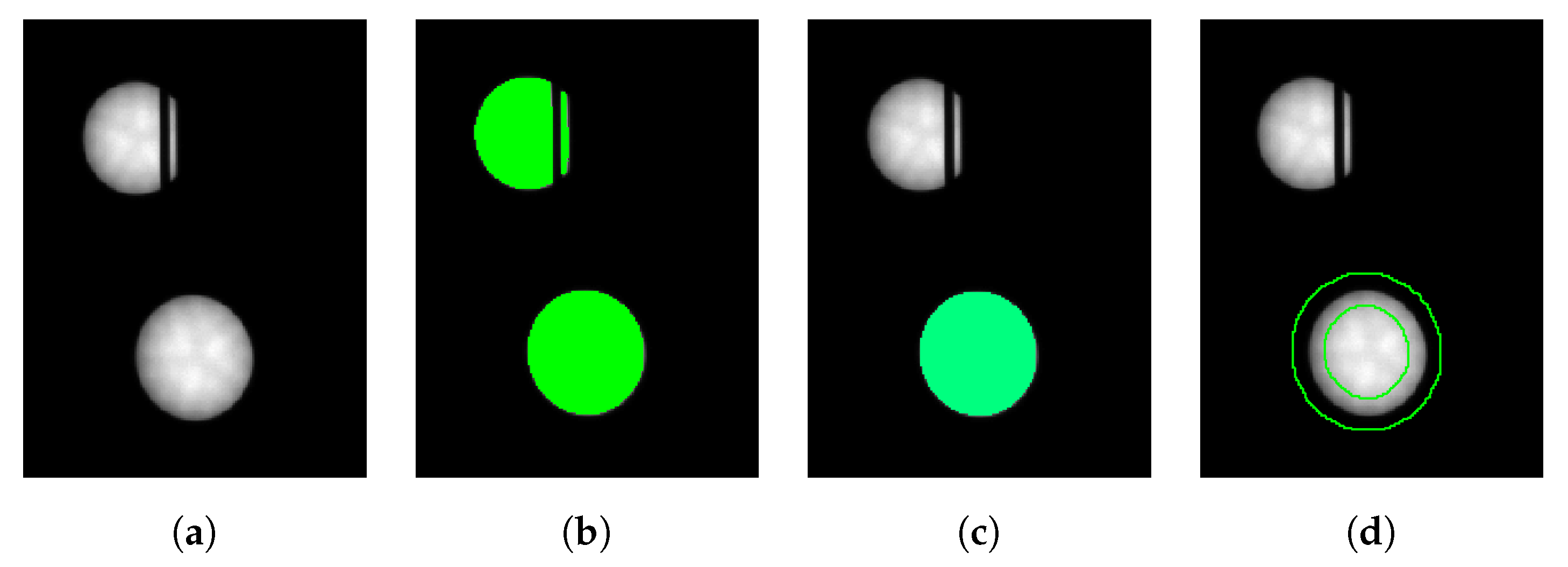
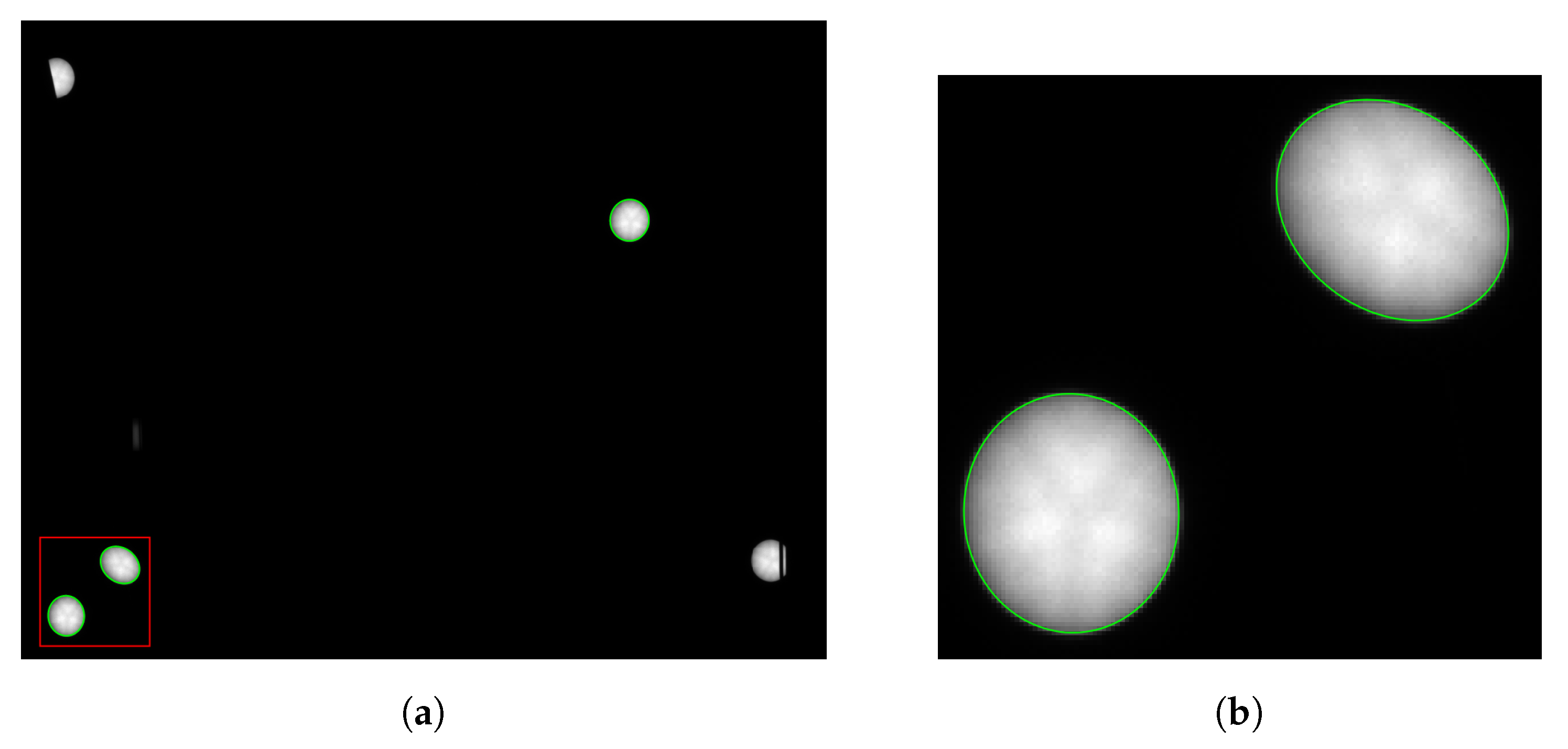
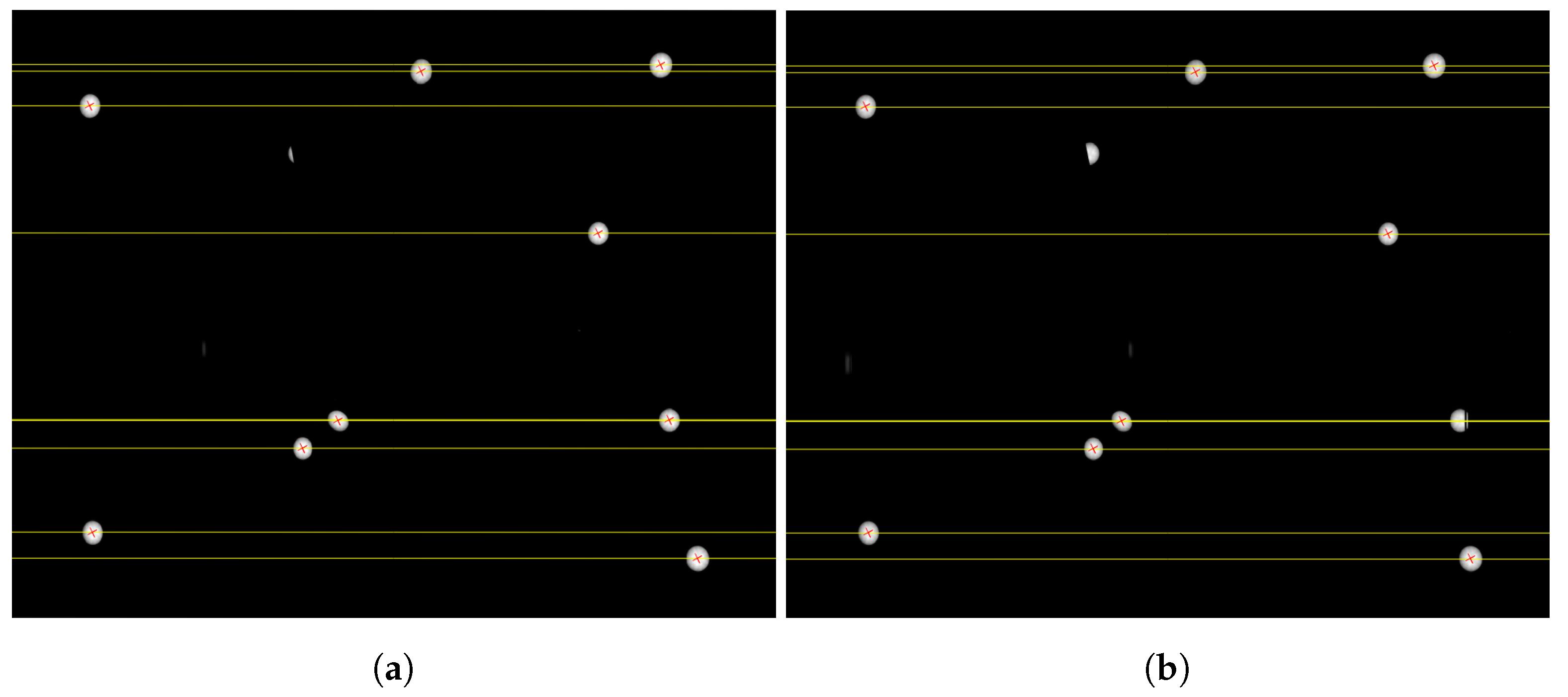
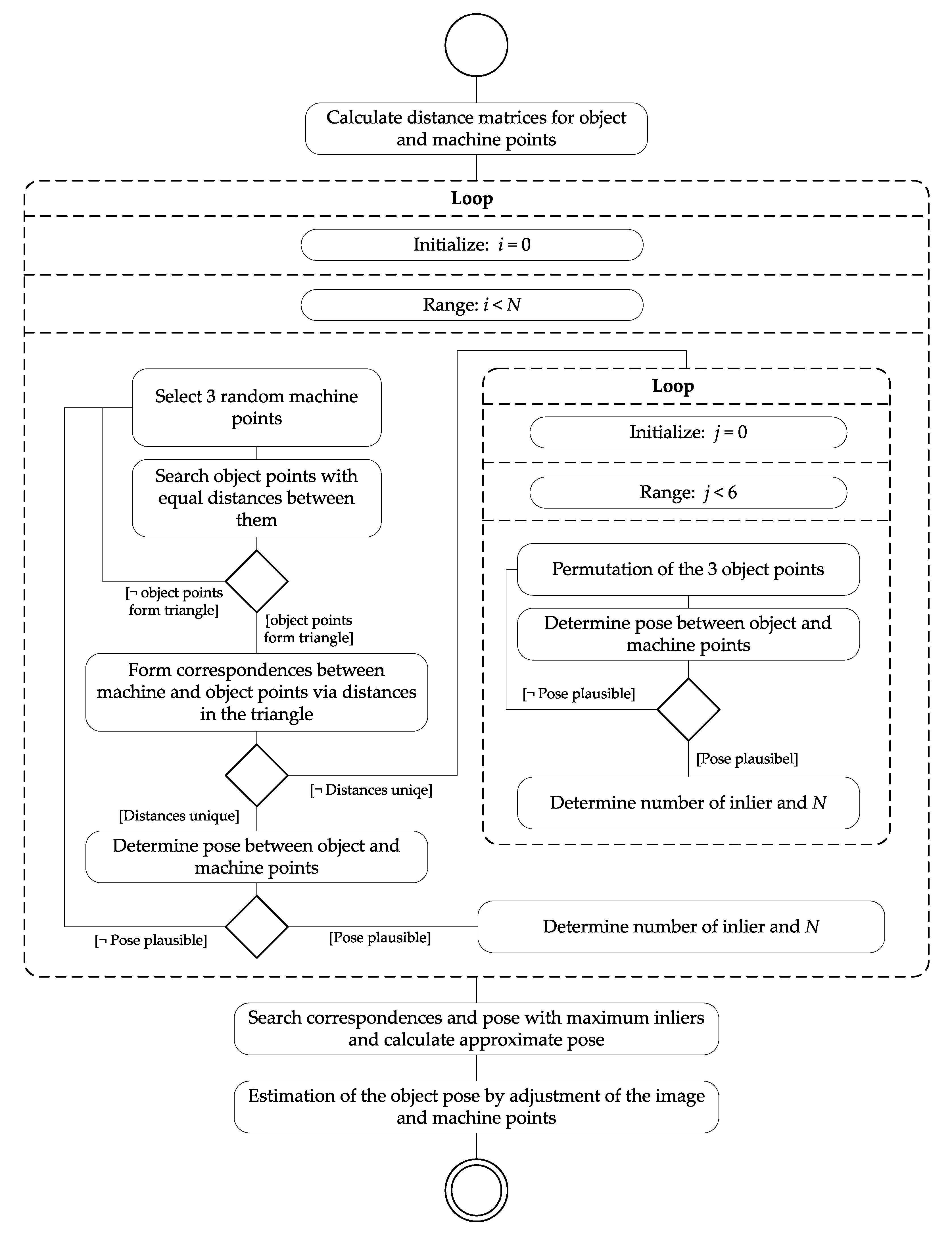
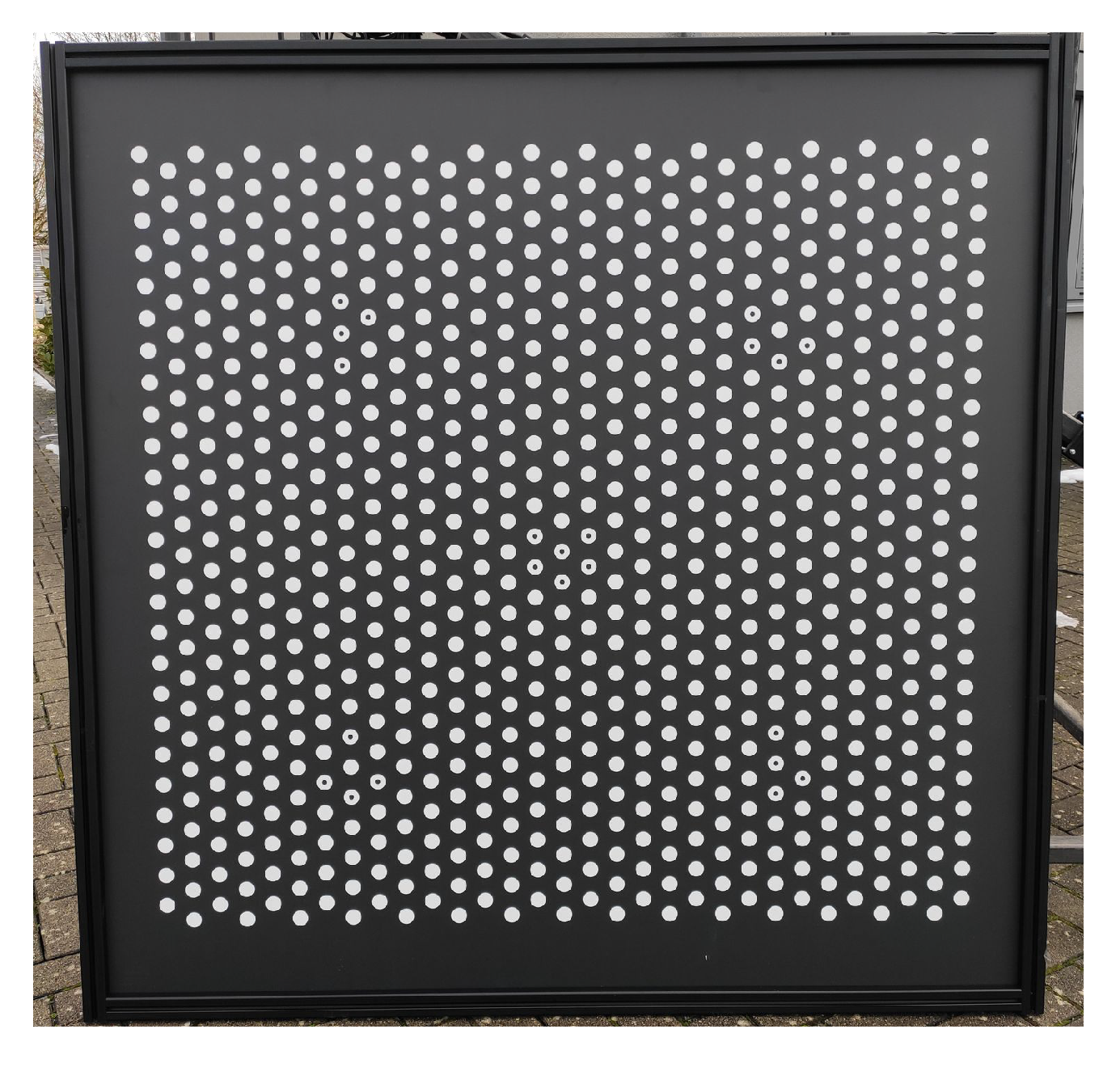
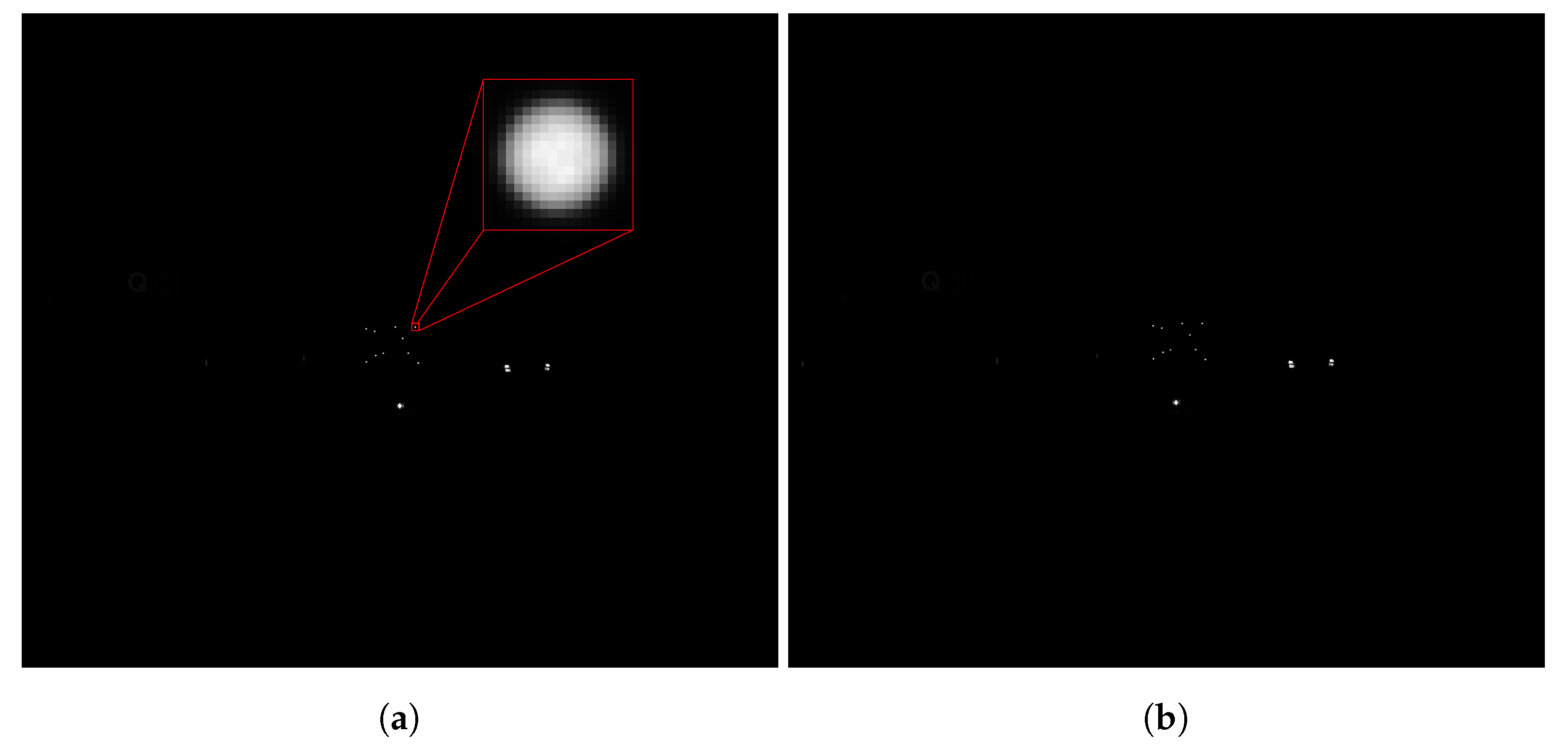
2.2. Object Point Detection
2.3. Object Pose Estimation
3. System Selection
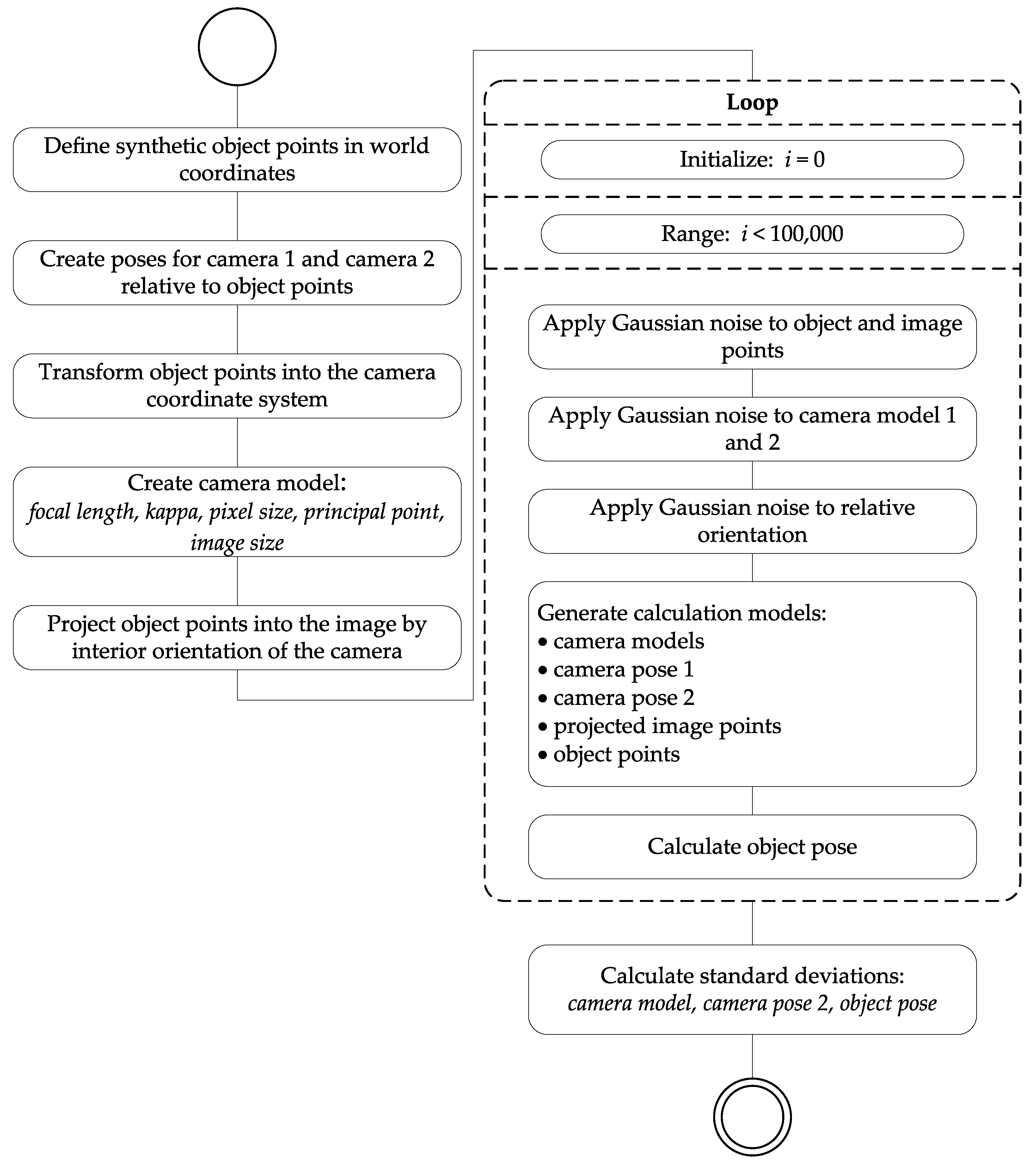
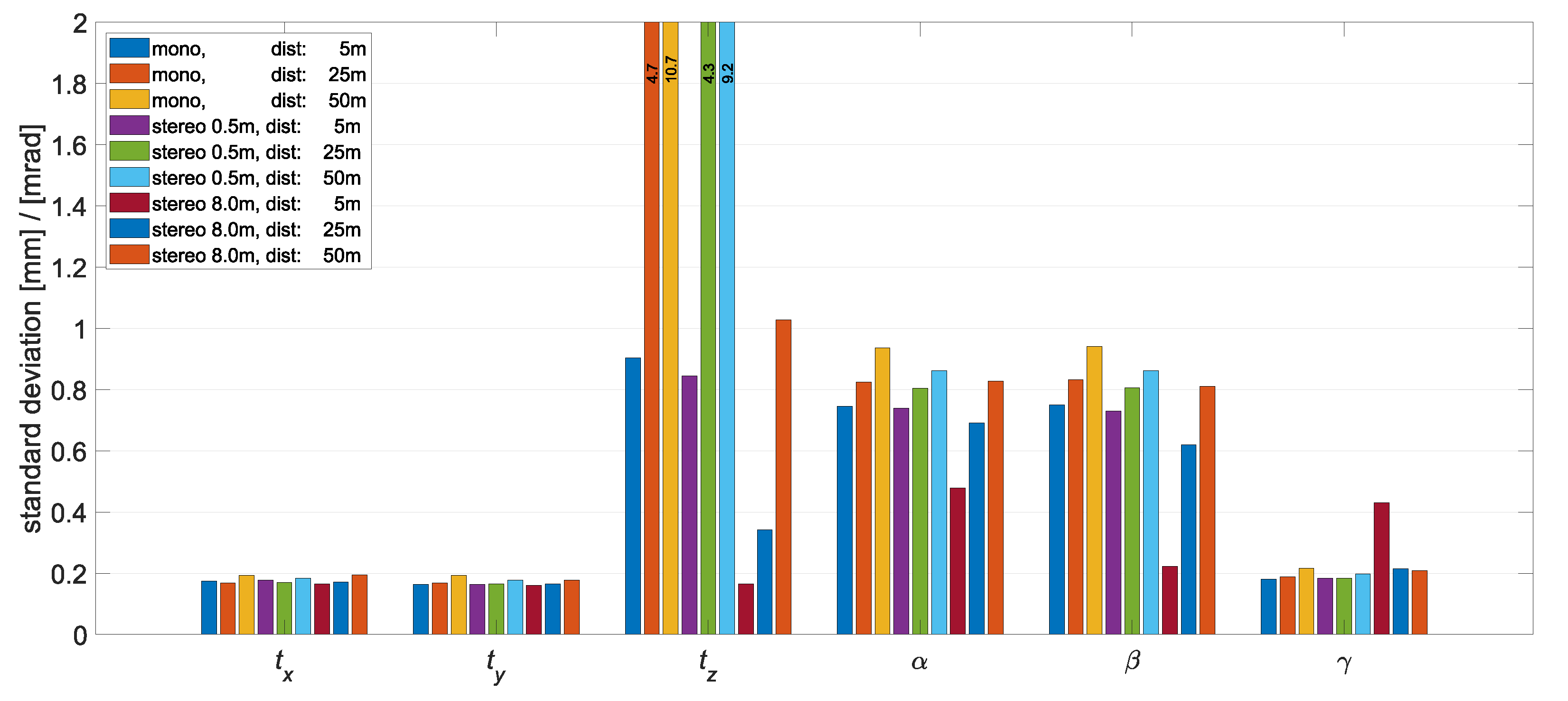
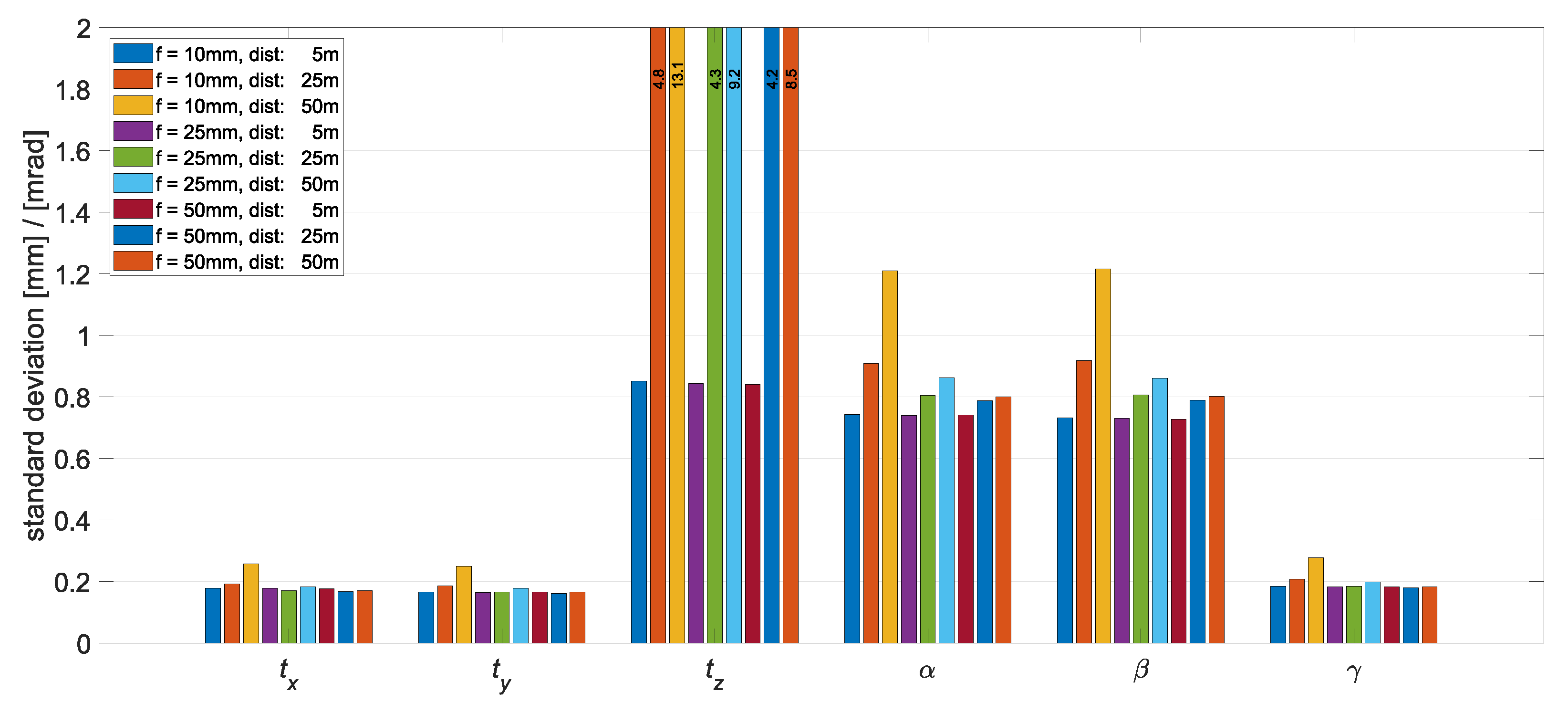
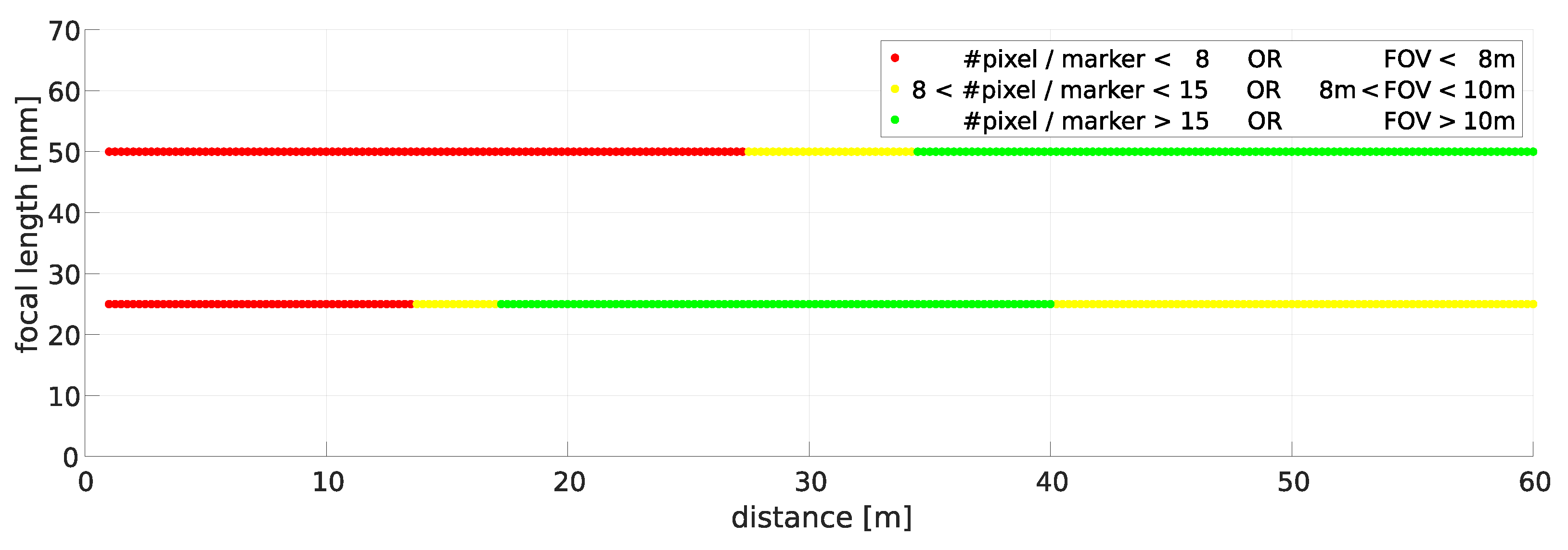
3.1. Influencing Aspects and Simulations
3.2. Camera System and Calibration
4. Evaluation
4.1. Field Measurements
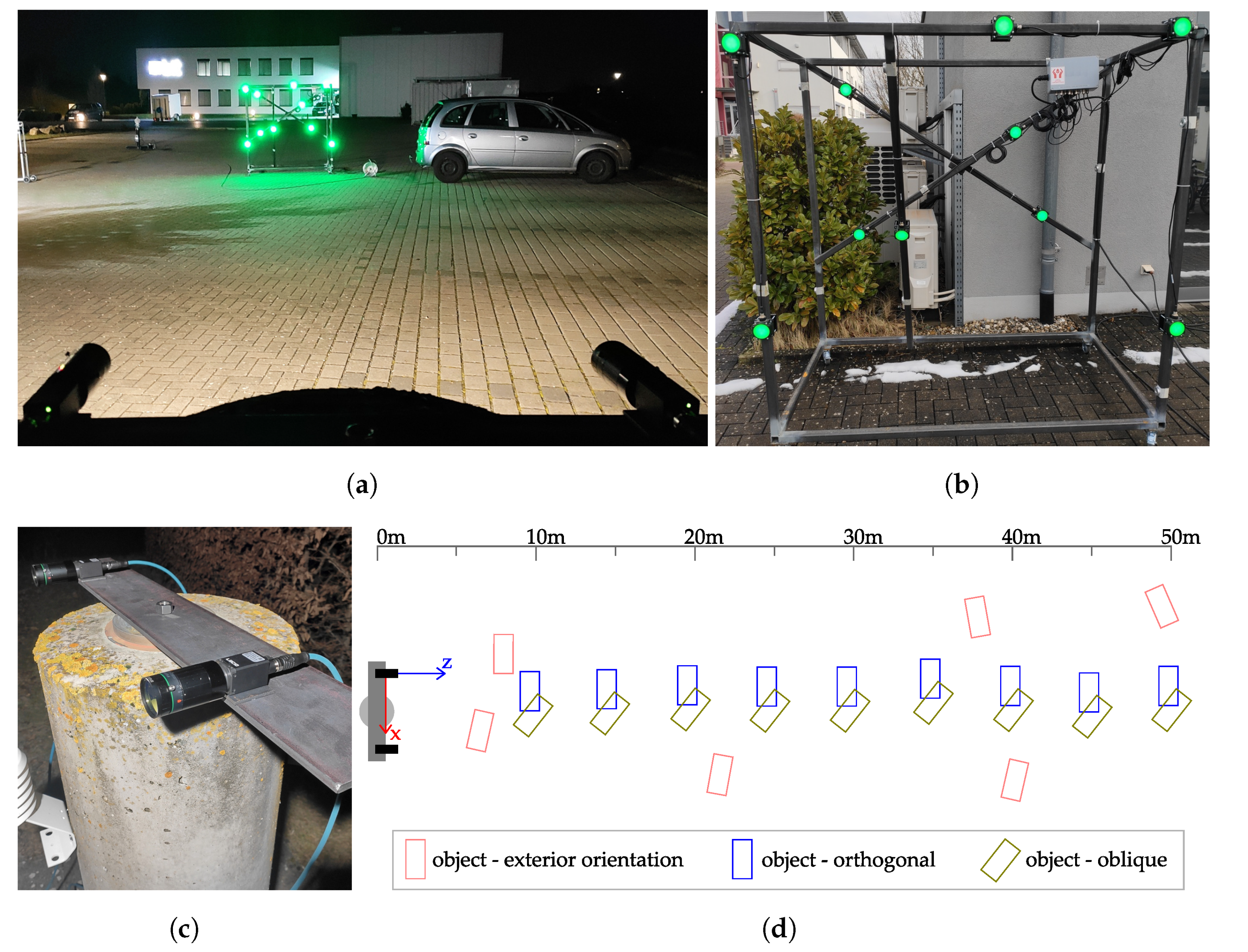
4.1.1. Experimental Setup
4.1.2. Reference Measurement
4.2. Accuracy Evaluation
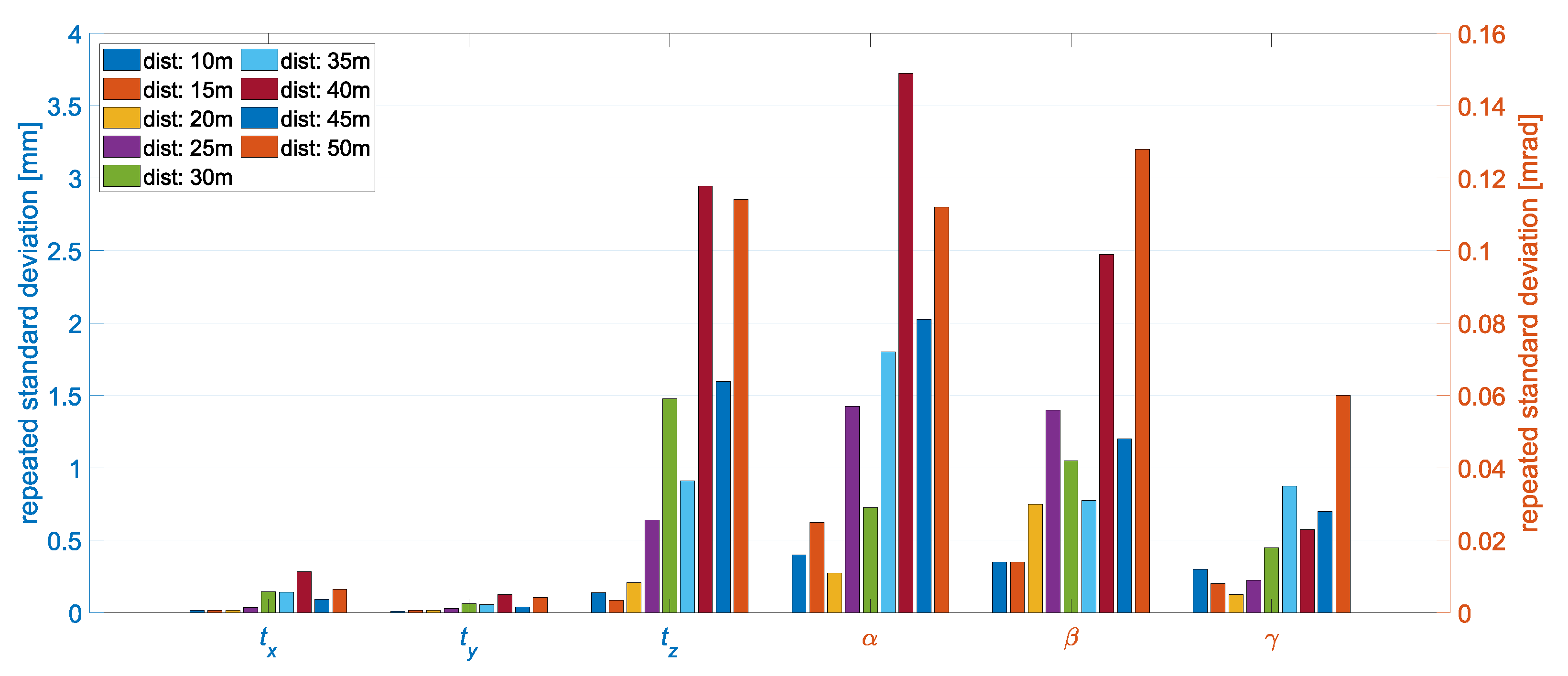
4.2.1. Relative Accuracy and Repeatability
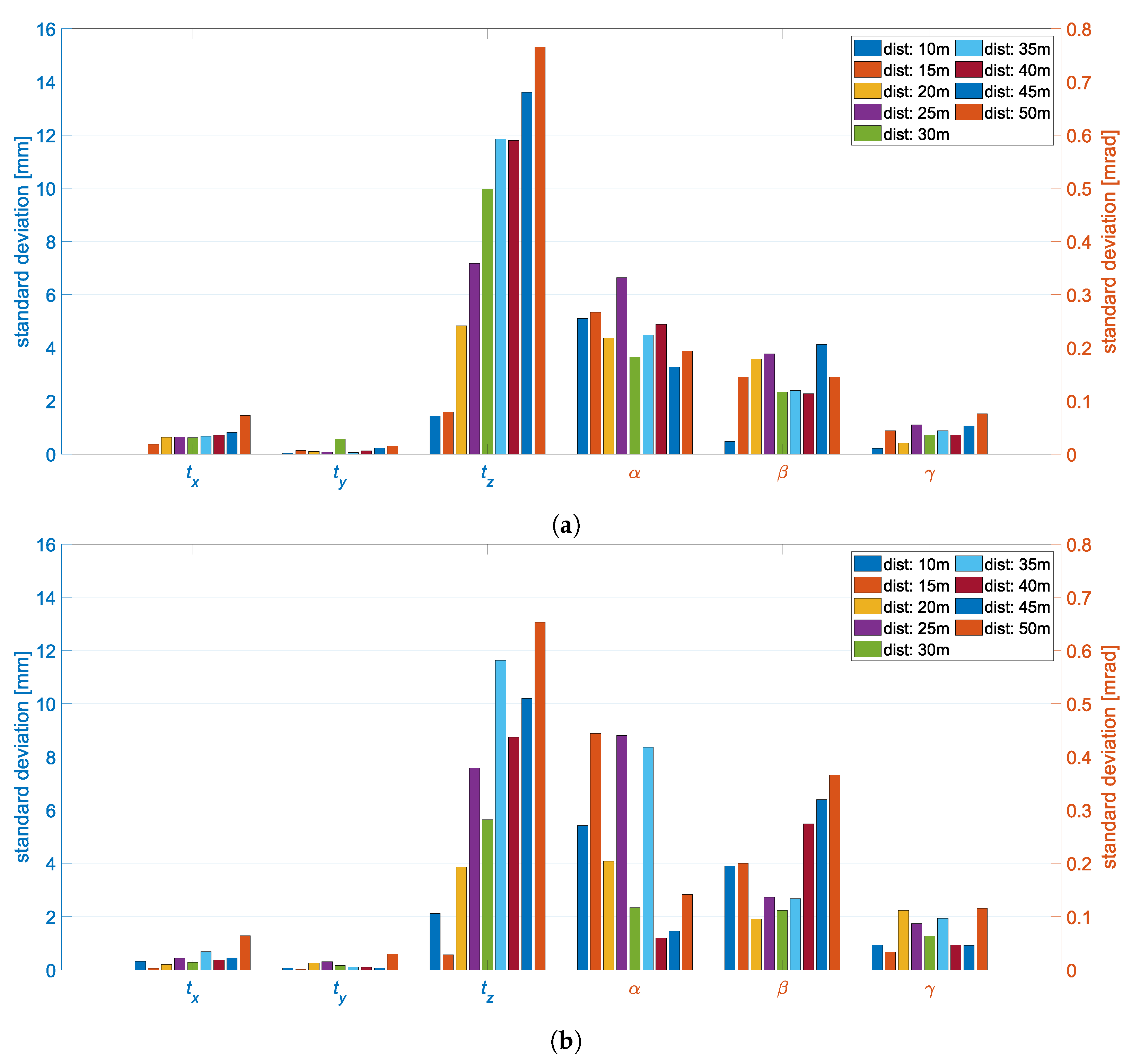
4.2.2. Absolute Accuracy
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Stempfhuber, W.; Ingensand, H. Baumaschinenführung und—Steuerung—Von der Statischen zur Kinematischen Absteckung. Z. GeodäSie Geoinf. Landmanagement (zfv) 2008, 133, 36–44. [Google Scholar]
- Liebherr. Crawler Dozers—Product Information. Operator Assistance Systems and Machine Control. Available online: https://www.liebherr.com/shared/media/construction-machinery/earthmoving/operator-assistance-systems/crawler-tractors-oas-microsite/liebherr-assistancesystems-brochure_en.pdf (accessed on 31 January 2022).
- Lienhart, W.; Ehrhart, M.; Grick, M. High frequent total station measurements for the monitoring of bridge vibrations. J. Appl. Geod. 2017, 11, 1–8. [Google Scholar] [CrossRef]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-Range Photogrammetry and 3D Imaging, 3rd ed.; De Gruyter: Berlin, Germany, 2019. [Google Scholar]
- Kerekes, G.; Schwieger, V. Kinematic positioning in a real time robotic total station network system. In Proceedings of the 6th International Conference on Machine Control & Guidance, Berlin, Germany, 1–2 October 2018; Weltzien, C., Krüger, J., Meyer, H., Eds.; Leibniz Institute for Agricultural Engineering and Bioeconomy (ATB): Berlin, Germany, 2018; pp. 35–43. [Google Scholar]
- Leica Geosystems AG. Leica Nova TS60. Available online: www.leica-geosystems.com/-/media/files/leicageosystems/products/datasheets/leica_nova_ts60_ds.ashx?la=en&hash=5C7BEB60644F956CFD103D64CE197073 (accessed on 31 January 2022).
- Trimble Inc. Trimble S9/S9 HP. Available online: https://geospatial.trimble.com/sites/geospatial.trimble.com/files/2019-04/022516-155F_TrimbleS9_DS_A4_0419_LR_0.pdf (accessed on 31 January 2022).
- Weinmann, M.; Wursthorn, S.; Jutzi, B. Semi-automatic image-based co-registration of range imaging data with different characteristics. In Proceedings of the 38th ISPRS Conference PIA, Munich, Germany, 5–7 October 2011; pp. 119–124. [Google Scholar]
- Keselman, L.; Iselin Woodfill, J.; Grunnet-Jepsen, A.; Bhowmik, A. Intel realsense stereoscopic depth cameras. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 1–10. [Google Scholar]
- Intel Corporation. Intel RealSense Depth Camera D455. Available online: https://www.intelrealsense.com/depth-camera-d455/ (accessed on 2 March 2022).
- Basler. Basler Blaze—Time-of-Flight-Kamera. Available online: https://www.baslerweb.com/de/produkte/kameras/3d-kameras/basler-blaze/ (accessed on 2 March 2022).
- LUCID Vision Labs. Lucid Helios2—Time-of-Flight-Kamera. Available online: https://thinklucid.com/de/helios-time-of-flight-tof-kamera/ (accessed on 2 March 2022).
- Nerian Vision. Product Specifications SceneScan & SceneScan Pro. 2021. Available online: https://nerian.de/nerian-content/downloads/documents/nerian-data-sheet-scenescan-scenescan-pro.pdf (accessed on 17 March 2022).
- Stereolabs. ZED 2. 2019. Available online: https://cdn.stereolabs.com/assets/datasheets/zed2-camera-datasheet.pdf (accessed on 17 March 2022).
- ARCURE. Omega. Available online: https://arcure.net/omega-stereo-camera-for-indoor-outdoor-applications (accessed on 17 March 2022).
- Garrido-Jurado, S.; Munoz-Salinas, R.; Madrid-Cuevas, F.J.; Medina-Carnicer, R. Generation of fiducial marker dictionaries using mixed integer linear programming. Pattern Recognit. 2016, 51, 481–491. [Google Scholar] [CrossRef]
- Steger, C.; Ulrich, M.; Wiedemann, C. Machine Vision Algorithms and Applications, 2nd ed.; Wiley-VCH: Berlin, Germany, 2018. [Google Scholar]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Deriche, R. Using Canny’s criteria to derive a recursively implemented optimal edge detector. Int. J. Comput. Vis. 1987, 1, 167–187. [Google Scholar] [CrossRef]
- Hough, P.V.C. Method and Means for Recognizing Complex Patterns. U.S. Patent 3069654, 18 December 1962. [Google Scholar]
- Atherton, T.J.; Kerbyson, D.J. Size invariant circle detection. Image Vis. Comput. 1999, 17, 795–803. [Google Scholar] [CrossRef]
- Ulrich, M.; Steger, C.; Baumgartner, A. Real-time object recognition using a modified generalized Hough transform. Pattern Recognit. 2003, 36, 2557–2570. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Ci, W.; Huang, Y. A Robust Method for Ego-Motion Estimation in Urban Environment Using Stereo Camera. Sensors 2016, 16, 1704. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Gu, Y.; Li, J.; Zhang, X. Robust Stereo Visual Odometry Using Improved RANSAC-Based Methods for Mobile Robot Localization. Sensors 2017, 17, 2339. [Google Scholar] [CrossRef] [Green Version]
- David, P.; Dementhon, D.; Duraiswami, R.; Samet, H. SoftPOSIT: Simultaneous pose and correspondence determination. Int. J. Comput. Vis. 2004, 59, 259–284. [Google Scholar] [CrossRef] [Green Version]
- Dong, H.; Sun, C.; Zhang, B.; Wang, P. Simultaneous Pose and Correspondence Determination Combining Softassign and Orthogonal Iteration. IEEE Access 2019, 7, 137720–137730. [Google Scholar] [CrossRef]
- Brown, D.C. Decentering distortion of lenses. Photogramm. Eng. 1966, 32, 444–462. [Google Scholar]
- HALCON 21.11 Progress. In HALCON Operator Reference Manual; MVTec Software GmbH: Munich, Germany, 2021.
- Maalek, R.; Lichti, D. Robust detection of non-overlapping ellipses from points with applications to circular target extraction in images and cylinder detection in point clouds. ISPRS J. Photogramm. Remote Sens. 2021, 176, 83–108. [Google Scholar] [CrossRef]
- Mosteller, F.; Tukey, J.W. Data Analysis and Regression: A Second Course in Statistics; Addison-Wesley Publishing Company: Reading, MA, USA, 1977. [Google Scholar]
- Fraundorfer, F.; Scaramuzza, D. Visual Odometry—Part II: Matching, Robustness, Optimization, and Applications. IEEE Robot. Autom. Mag. 2012, 19, 78–90. [Google Scholar] [CrossRef] [Green Version]
- Bauer, W.F. The Monte Carlo method. J. Soc. Ind. Appl. Math. 1958, 6, 438–451. [Google Scholar] [CrossRef] [Green Version]
- Joint Committee for Guides in Metrology. Evaluation of measurement data—Guide to the expression of uncertainty in measurement. JCGM 2008, 100, 1–116. [Google Scholar]
- Sun, P.; Lu, N.G.; Dong, M.L.; Yan, B.X.; Wang, J. Simultaneous all-parameters calibration and assessment of a stereo camera pair using a scale bar. Sensors 2018, 18, 3964. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weimin, L.; Siyu, S.; Hui, L. High-precision method of binocular camera calibration with a distortion model. Appl. Opt. 2017, 56, 2368–2377. [Google Scholar] [CrossRef]
- Association for Advancing Automation. GigE Vision—Video Streaming and Device Control Over Ethernet Standard; Association for Advancing Automation: Ann Arbor, MI, USA, 2018; Rel. 2.1. [Google Scholar]
- IEEE Std 1588-2019 (Revision of IEEE Std 1588-2008); IEEE Standard for a Precision Clock Synchronization Protocol for Networked Measurement and Control Systems. IEEE: New York, NY, USA, 2020; pp. 1–499. [CrossRef]
- Brown, D.C. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar] [CrossRef]
- European Machine Vision Association. EMVA Standard 1288—Standard for Characterization of Image Sensors and Cameras; European Machine Vision Association: Barcelona, Spain, 2016; Rel. 3.1. [Google Scholar]
- Power Motion. Banner Engineering K80FL. Available online: https://www.powermotionstore.com/products/K80FLGXXP (accessed on 29 September 2021).
- Luhmann, T. Eccentricity in images of circular and spherical targets and its impact on spatial intersection. Photogramm. Rec. 2014, 29, 417–433. [Google Scholar] [CrossRef]
- Hexagon Metrology. Leica Absolute Tracker AT402. 2015. Available online: https://www.hexagonmi.com/-/media/Hexagon%20MI%20Legacy/m1/metrology/Absolute_Tracker_AT4/brochures-datasheet/Leica%20Absolute%20Tracker%20AT402%20-%20ASME%20specifications_en.ashx (accessed on 31 January 2022).
- Roberts, C.; Boorer, P. Kinematic positioning using a robotic total station as applied to small-scale UAVs. J. Spat. Sci. 2016, 61, 29–45. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bertels, M.; Jutzi, B.; Ulrich, M. Automatic Real-Time Pose Estimation of Machinery from Images. Sensors 2022, 22, 2627. https://doi.org/10.3390/s22072627
Bertels M, Jutzi B, Ulrich M. Automatic Real-Time Pose Estimation of Machinery from Images. Sensors. 2022; 22(7):2627. https://doi.org/10.3390/s22072627
Chicago/Turabian StyleBertels, Marcel, Boris Jutzi, and Markus Ulrich. 2022. "Automatic Real-Time Pose Estimation of Machinery from Images" Sensors 22, no. 7: 2627. https://doi.org/10.3390/s22072627