

Single-Shunt Measurement of Three-Phase Currents for a Three-Level Inverter under the Low Modulation Index Operation

Abstract
:1. Introduction
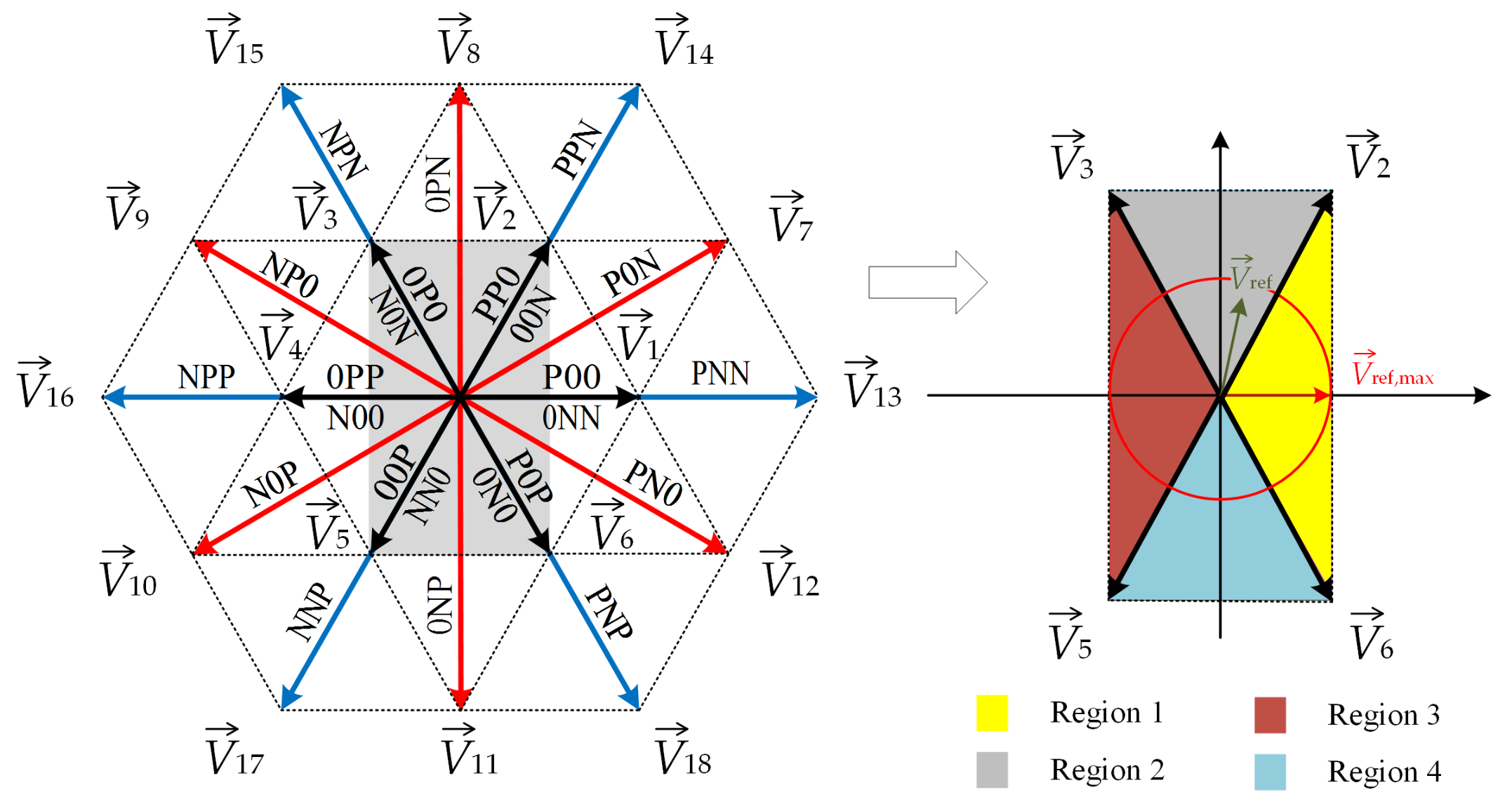
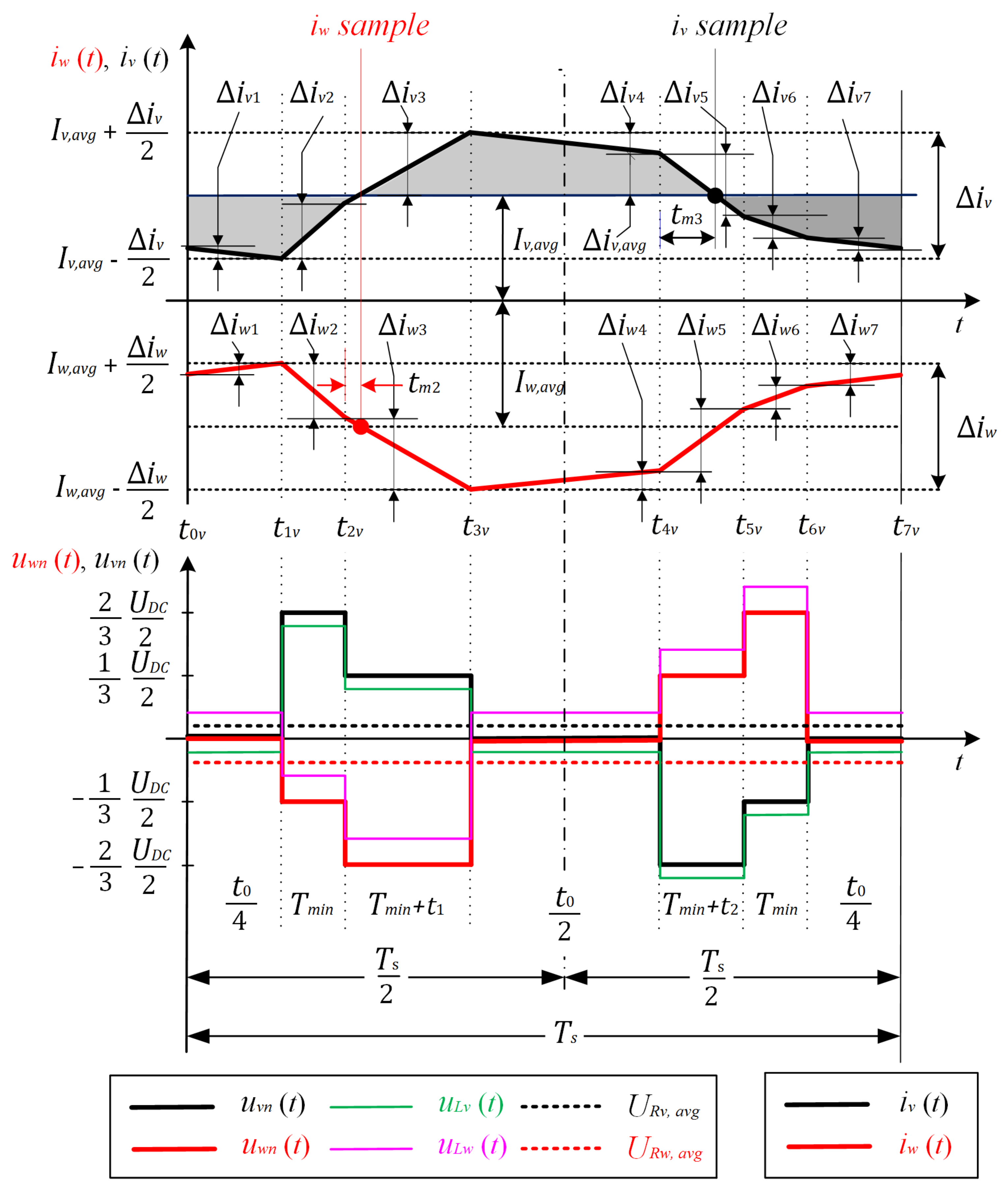
2. Current Reconstruction Method under the Low Modulation Index Inverter Operation
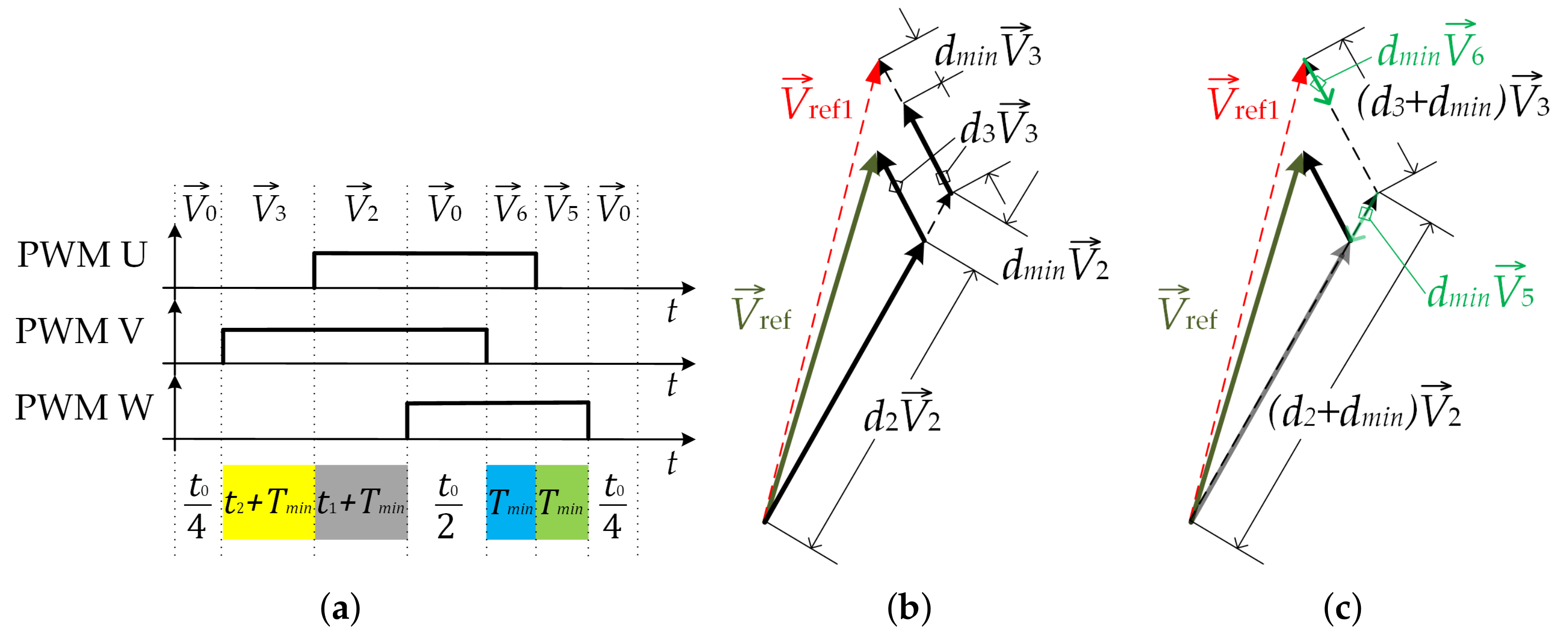
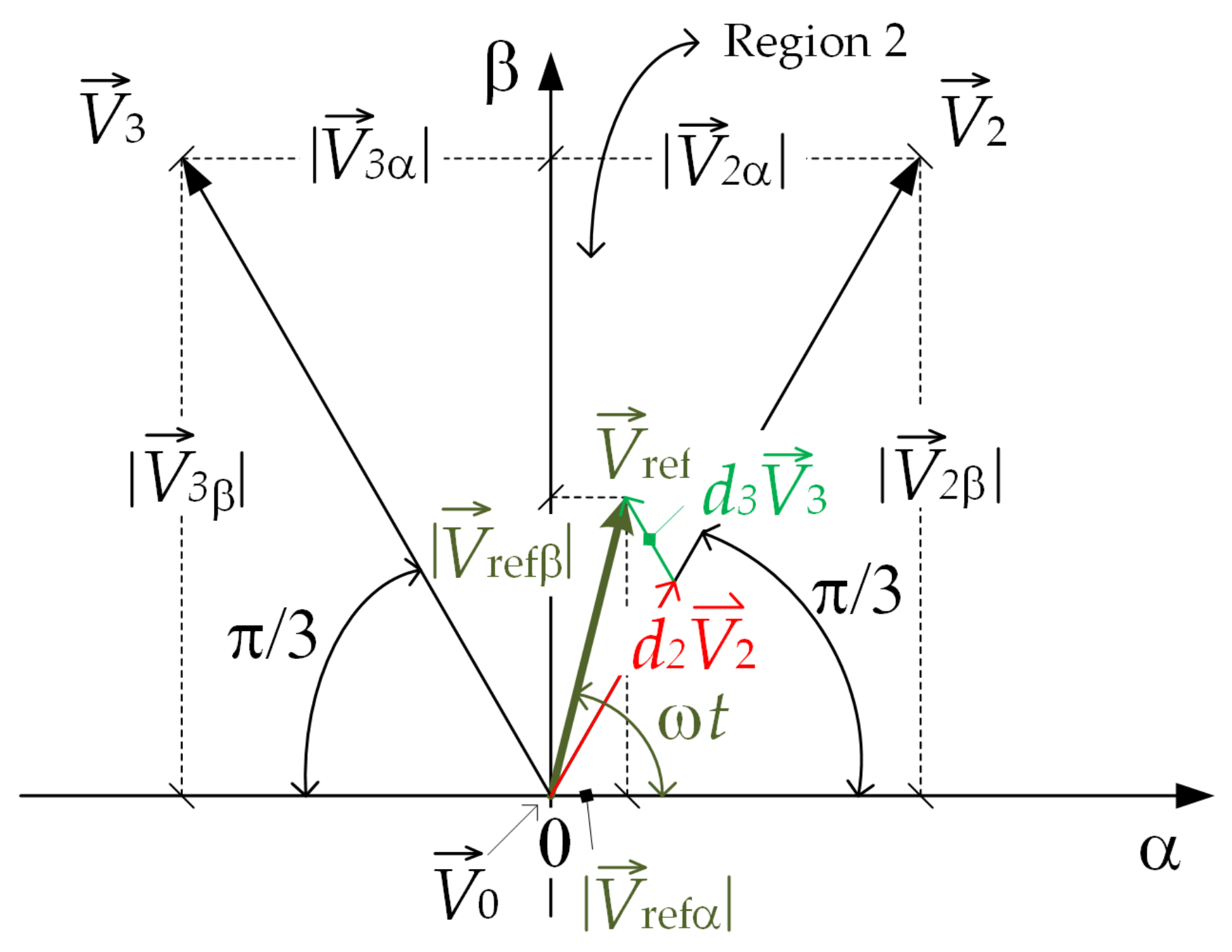
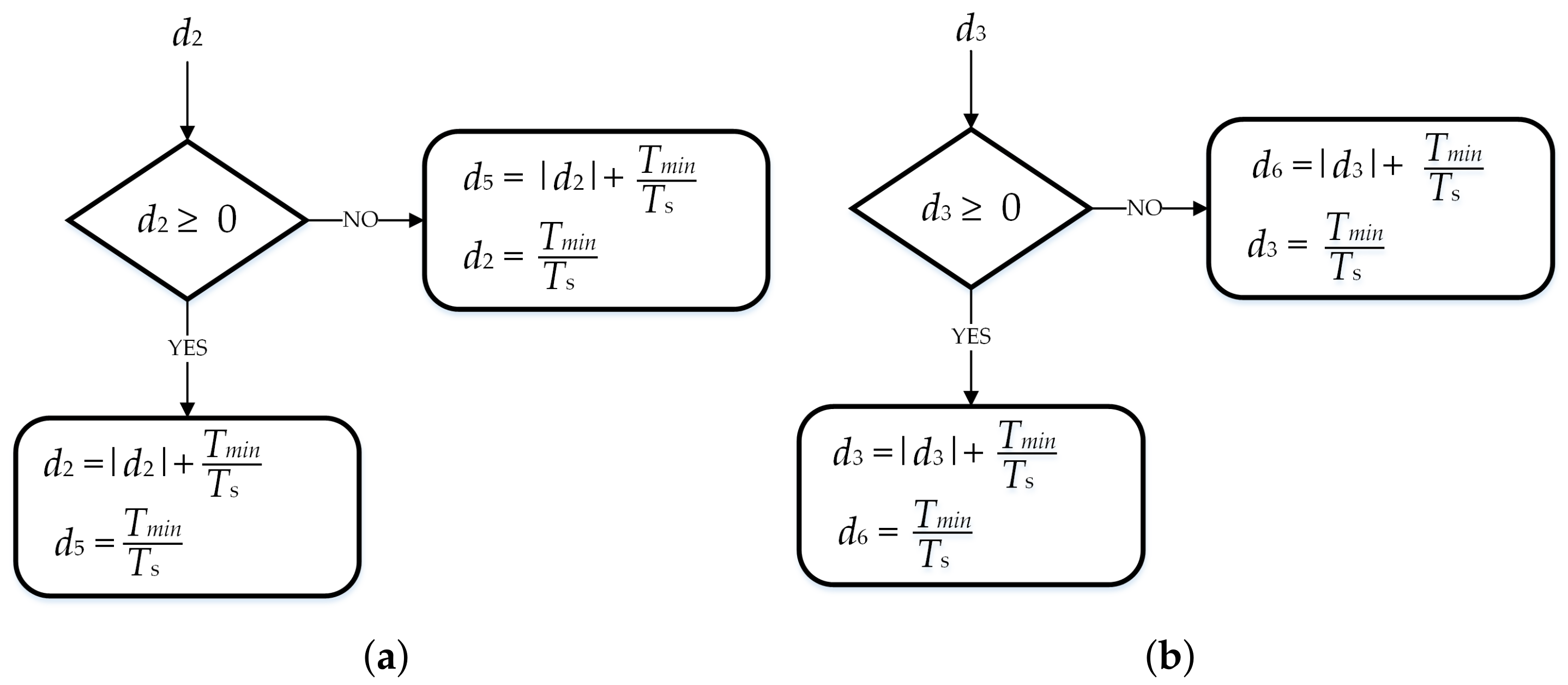
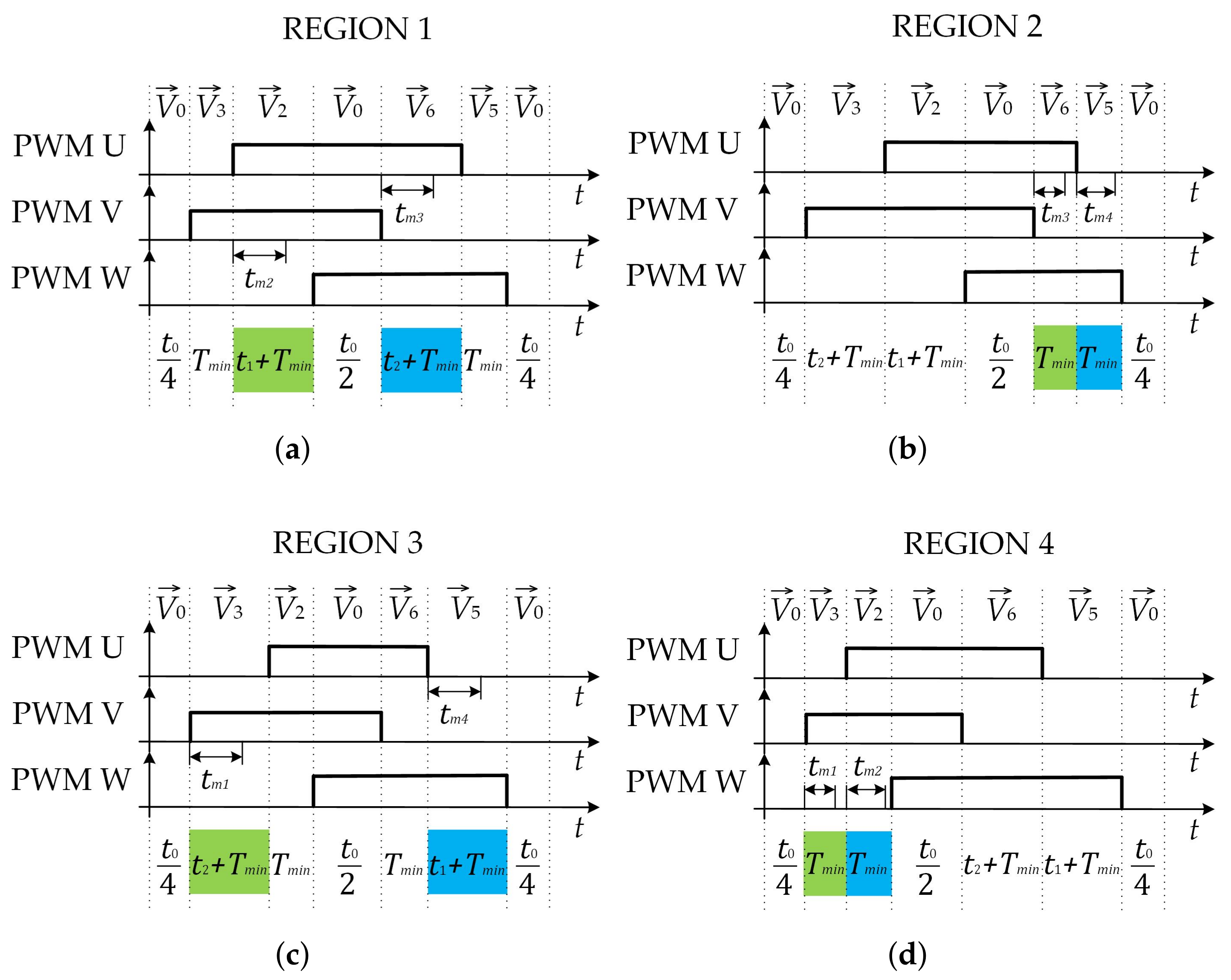
3. Current Sampling Positions
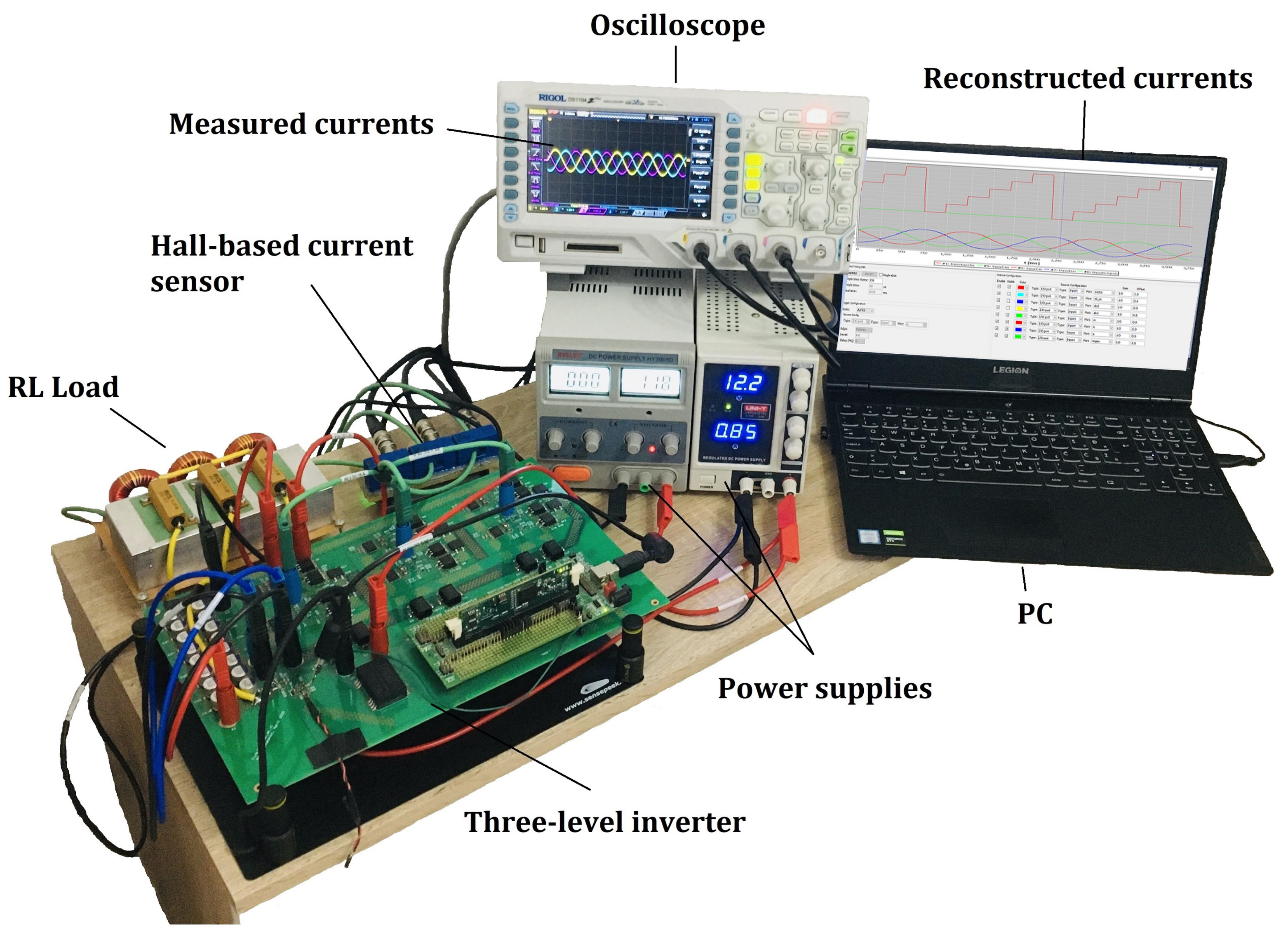
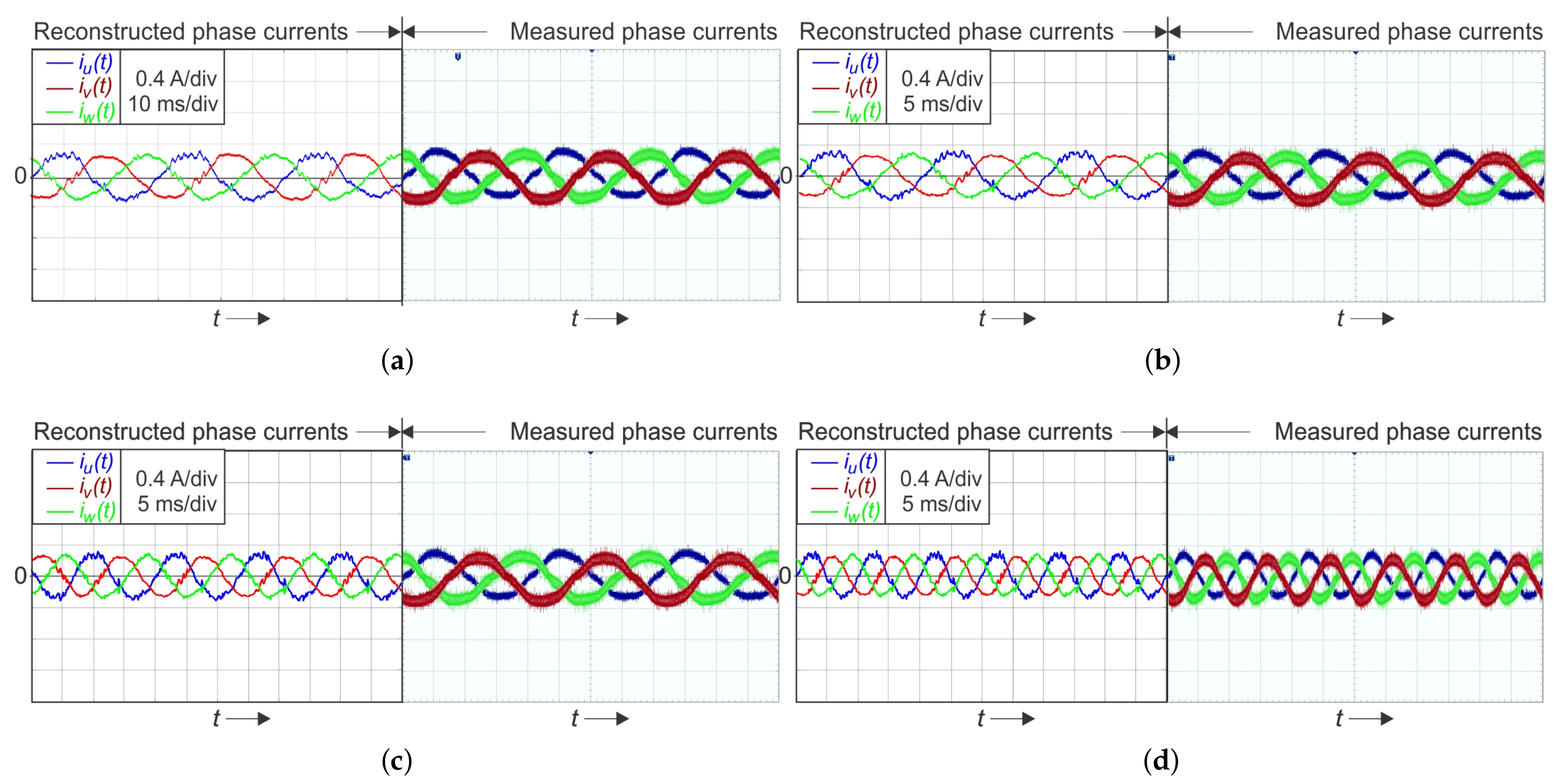
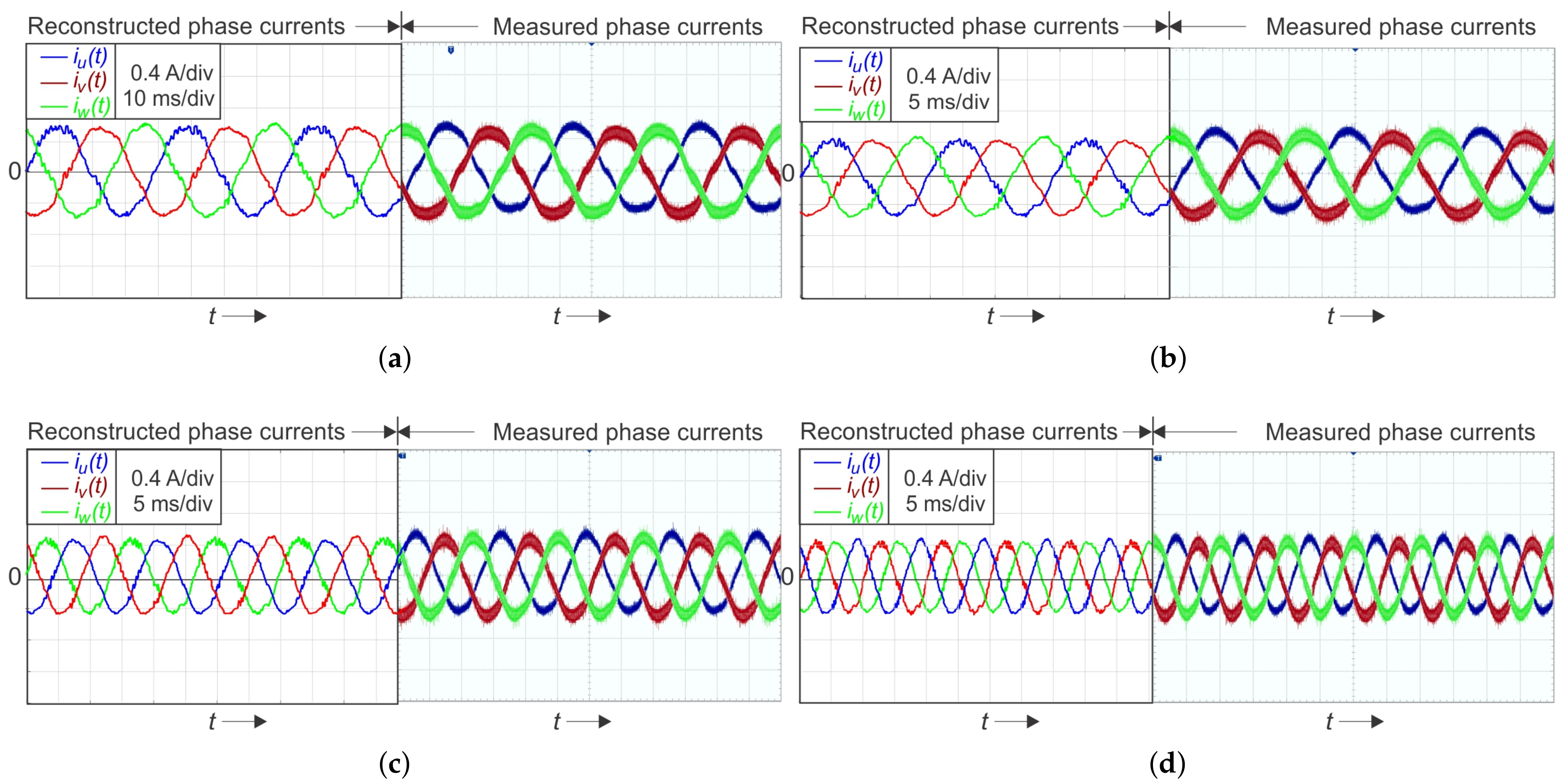
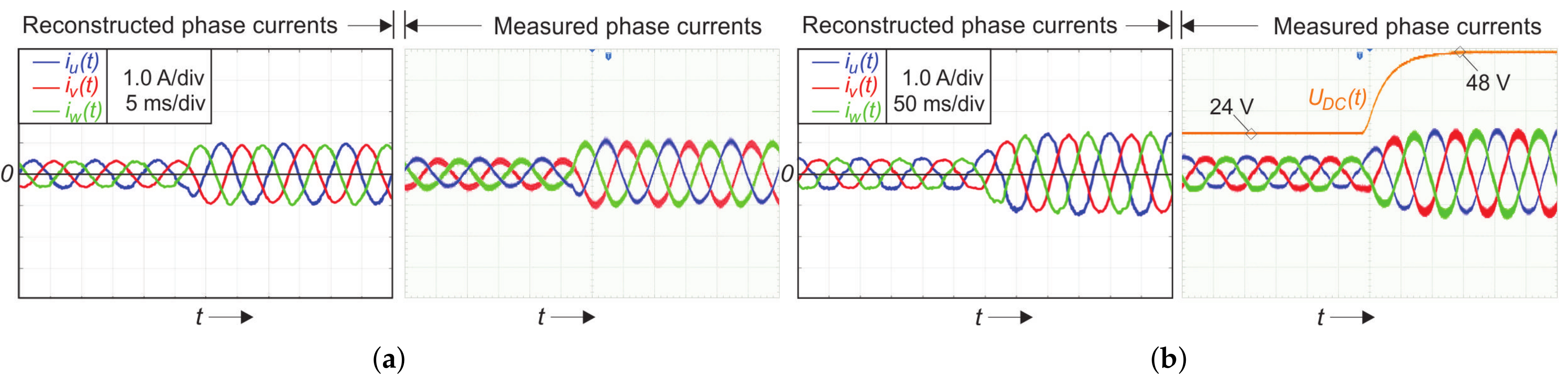
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, L.; Chen, F.; Li, B.; Li, C.; Wang, G.; Wang, S.; Zhang, G.; Xu, D. Phase Current Reconstruction Error Suppression Method for Single DC-Link Shunt PMSM Drives at Low-Speed Region. IEEE Trans. Power Electron. 2022, 37, 7067–7081. [Google Scholar] [CrossRef]
- Torres, D.; Zambada, J. Texas Instruments “Single-Shunt Three-Phase Current Reconstruction Algorithm for Sensorless FOC of a PMSM”. Application Note. Available online: http://ww1.microchip.com/downloads/en/AppNotes/01299A.pdf (accessed on 4 March 2022).
- Cho, Y.; LaBella, T.; Lai, J. A Three-Phase Current Reconstruction Strategy with Online Current Offset Compensation Using a Single Current Sensor. IEEE Trans. Ind. Electron. 2012, 59, 2924–2933. [Google Scholar] [CrossRef]
- Adzic, E.M.; Adzic, M.S.; Katic, V.A.; Marcetic, D.P.; Celanovic, N.L. Development of High-Reliability EV and HEV IM Propulsion Drive with Ultra-Low Latency HIL Environment. IEEE Trans. Ind. Inform. 2013, 9, 630–639. [Google Scholar] [CrossRef]
- Yan, H.; Xu, Y.; Zou, J.; Fang, Y.; Cai, F. A Novel Open-Circuit Fault Diagnosis Method for Voltage Source Inverters with a Single Current Sensor. IEEE Trans. Power Electron. 2018, 33, 8775–8786. [Google Scholar] [CrossRef]
- Manohar, M.; Das, S. Current Sensor Fault-Tolerant Control for Direct Torque Control of Induction Motor Drive Using Flux-Linkage Observer. IEEE Trans. Ind. Inform. 2017, 13, 2824–2833. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, H.; Zou, J.; Wang, B.; Li, Y. Zero Voltage Vector Sampling Method for PMSM Three-Phase Current Reconstruction Using Single Current Sensor. IEEE Trans. Power Electron. 2017, 32, 3797–3807. [Google Scholar] [CrossRef]
- Zhang, Z.; Leggate, D.; Matsuo, T. Industrial Inverter Current Sensing with Three Shunt Resistors: Limitations and Solutions. IEEE Trans. Power Electron. 2017, 32, 4577–4586. [Google Scholar] [CrossRef]
- Wu, F.; Zhao, J. Current Similarity Analysis-Based Open-Circuit Fault Diagnosis for Two-Level Three-Phase PWM Rectifier. IEEE Trans. Power Electron. 2017, 32, 3935–3945. [Google Scholar] [CrossRef]
- Matsuura, K.; Ohishi, K.; Haga, H.; Ando, I. Fine motor current control based on new current reconstruction method using one DC-link current sensor. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 004376–004381. [Google Scholar] [CrossRef]
- Lu, J.; Hu, Y.; Liu, J. Analysis and Compensation of Sampling Errors in TPFS IPMSM Drives With Single Current Sensor. IEEE Trans. Ind. Electron. 2019, 66, 3852–3855. [Google Scholar] [CrossRef]
- Finch, J.W.; Giaouris, D. Controlled AC Electrical Drives. IEEE Trans. Ind. Electron. 2008, 55, 481–491. [Google Scholar] [CrossRef]
- Shen, Y.; Zheng, Z.; Wang, Q.; Liu, P.; Yang, X. DC Bus Current Sensed Space Vector Pulsewidth Modulation for Three-Phase Inverter. IEEE Trans. Transp. Electrif. 2021, 7, 815–824. [Google Scholar] [CrossRef]
- Li, X.; Dusmez, S.; Akin, B.; Rajashekara, K. A New SVPWM for the Phase Current Reconstruction of Three-Phase Three-level T-type Converters. IEEE Trans. Power Electron. 2016, 31, 2627–2637. [Google Scholar] [CrossRef]
- Ha, J. Voltage Injection Method for Three-Phase Current Reconstruction in PWM Inverters Using a Single Sensor. IEEE Trans. Power Electron. 2009, 24, 767–775. [Google Scholar] [CrossRef]
- Kim, H.; Jahns, T.M. Current Control for AC Motor Drives Using a Single DC-Link Current Sensor and Measurement Voltage Vectors. IEEE Trans. Ind. Appl. 2006, 42, 1539–1547. [Google Scholar] [CrossRef]
- Ha, J. Current Prediction in Vector-Controlled PWM Inverters Using Single DC-Link Current Sensor. IEEE Trans. Ind. Electron. 2010, 57, 716–726. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Pedersen, J.K.; Jaeger, U.; Thoegersen, P. Single current sensor technique in the DC-link of three-phase PWM-VS inverters: A review and a novel solution. IEEE Trans. Ind. Appl. 1997, 33, 1241–1253. [Google Scholar] [CrossRef]
- Dordevic, O.; Jones, M.; Levi, E. A Comparison of Carrier-Based and Space Vector PWM Techniques for Three-Level Five-Phase Voltage Source Inverters. IEEE Trans. Ind. Inform. 2013, 9, 609–619. [Google Scholar] [CrossRef]
- Li, J. Design and Control Optimisation of a Novel Bypass-embedded Multilevel Multicell Inverter for Hybrid Electric Vehicle Drives. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Dubrovnik, Croatia, 8–11 June 2020; pp. 382–385. [Google Scholar] [CrossRef]
- Madishetti, S.; Singh, B.; Bhuvaneswari, G. Three-Level NPC-Inverter-Based SVM-VCIMD With Feedforward Active PFC Rectifier for Enhanced AC Mains Power Quality. IEEE Trans. Ind. Appl. 2016, 52, 1865–1873. [Google Scholar] [CrossRef]
- Vahedi, H.; Shojaei, A.A.; Chandra, A.; Al-Haddad, K. Five-Level Reduced-Switch-Count Boost PFC Rectifier With Multicarrier PWM. IEEE Trans. Ind. Appl. 2016, 52, 4201–4207. [Google Scholar] [CrossRef]
- Rodriguez, J.; Lai, J.; Peng, F.Z. Multilevel inverters: A survey of topologies, controls, and applications. IEEE Trans. Ind. Electron. 2002, 49, 724–738. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Ha, J.-I.; Sul, S.-K. Single Shunt Current Sensing Technique in Three-level PWM inverter. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 1445–1451. [Google Scholar] [CrossRef]
- Kovacevic, H.; Korosec, L.; Milanovic, M. Single-Shunt Three-Phase Current Measurement for a Three-Level Inverter Using a Modified Space-Vector Modulation. Electronics 2021, 10, 1734. [Google Scholar] [CrossRef]
- Lim, S. Texas Instruments. Sensorless-FOC for PMSM with Single DC-Link Shunt. Application Report. Available online: www.ti.com/lit/an/spract7/spract7.pdf?ts=1622036373727 (accessed on 1 March 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | |||||
|---|---|---|---|---|---|
| 1 | 1 | 0 | 0 | P | |
| 0 | 1 | 1 | 0 | 0 | 0 |
| 0 | 1 | 1 | 1 | N |
| Region | Expression |
|---|---|
| Region 1 | |
| Region 2 | |
| Region 3 | |
| Region 4 | |
| Frequency (Hz) | Modulation Index | Reconstructed Current (A) | Scope Measurement (A) | Relative Error (%) |
|---|---|---|---|---|
| 25 | ||||
| 50 | ||||
| 75 | ||||
| 100 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovačević, H.; Drevenšek, D.; Ban, Ž.; Svečko, R.; Milanovič, M. Single-Shunt Measurement of Three-Phase Currents for a Three-Level Inverter under the Low Modulation Index Operation. Sensors 2022, 22, 2249. https://doi.org/10.3390/s22062249
Kovačević H, Drevenšek D, Ban Ž, Svečko R, Milanovič M. Single-Shunt Measurement of Three-Phase Currents for a Three-Level Inverter under the Low Modulation Index Operation. Sensors. 2022; 22(6):2249. https://doi.org/10.3390/s22062249
Chicago/Turabian StyleKovačević, Haris, Dušan Drevenšek, Željko Ban, Rajko Svečko, and Miro Milanovič. 2022. "Single-Shunt Measurement of Three-Phase Currents for a Three-Level Inverter under the Low Modulation Index Operation" Sensors 22, no. 6: 2249. https://doi.org/10.3390/s22062249