
A New Design of the Dual-Mode and Pure Longitudinal EMAT by Using a Radial-Flux-Focusing Magnet

 , ,
, ,
Abstract
:1. Introduction
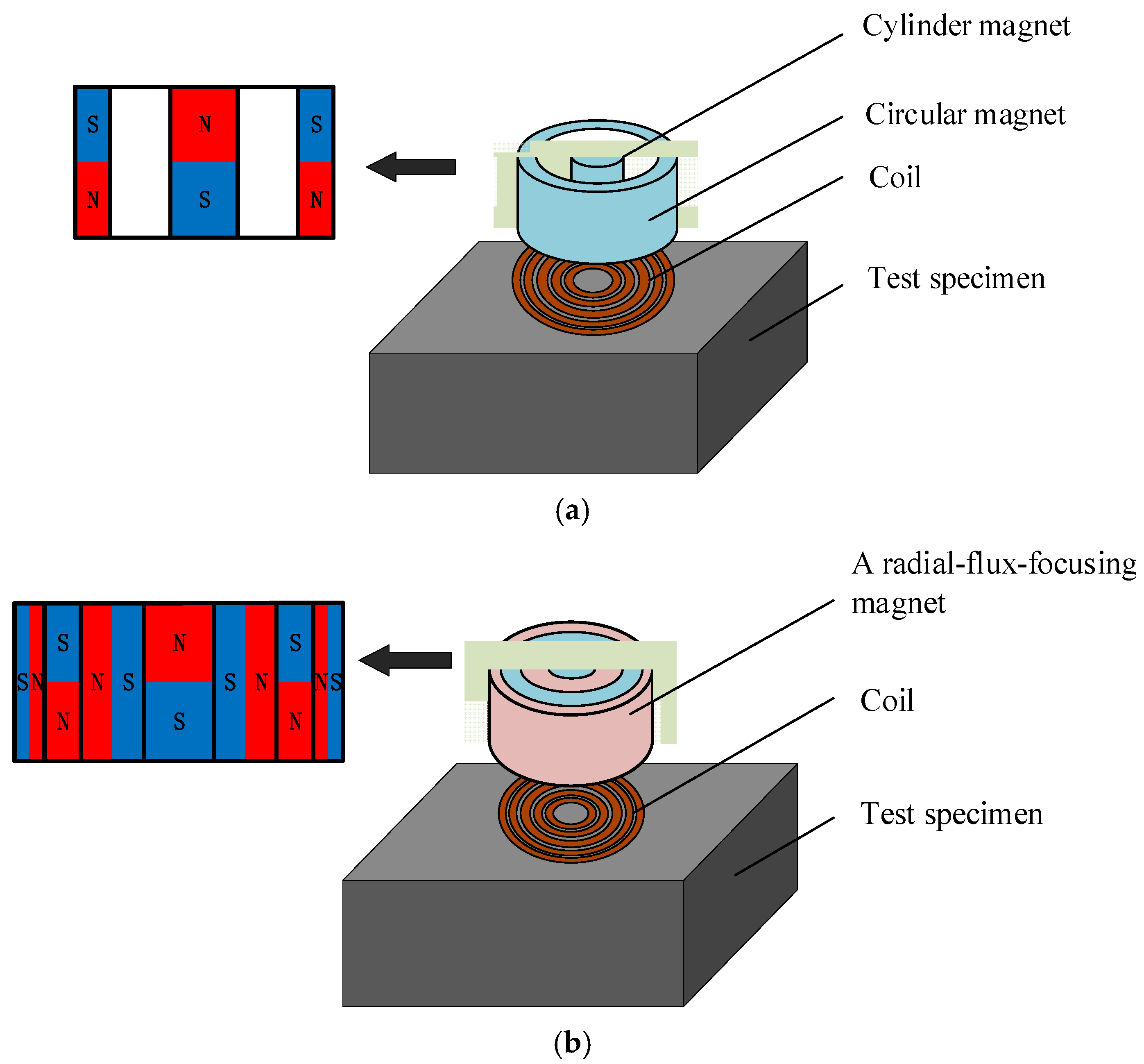
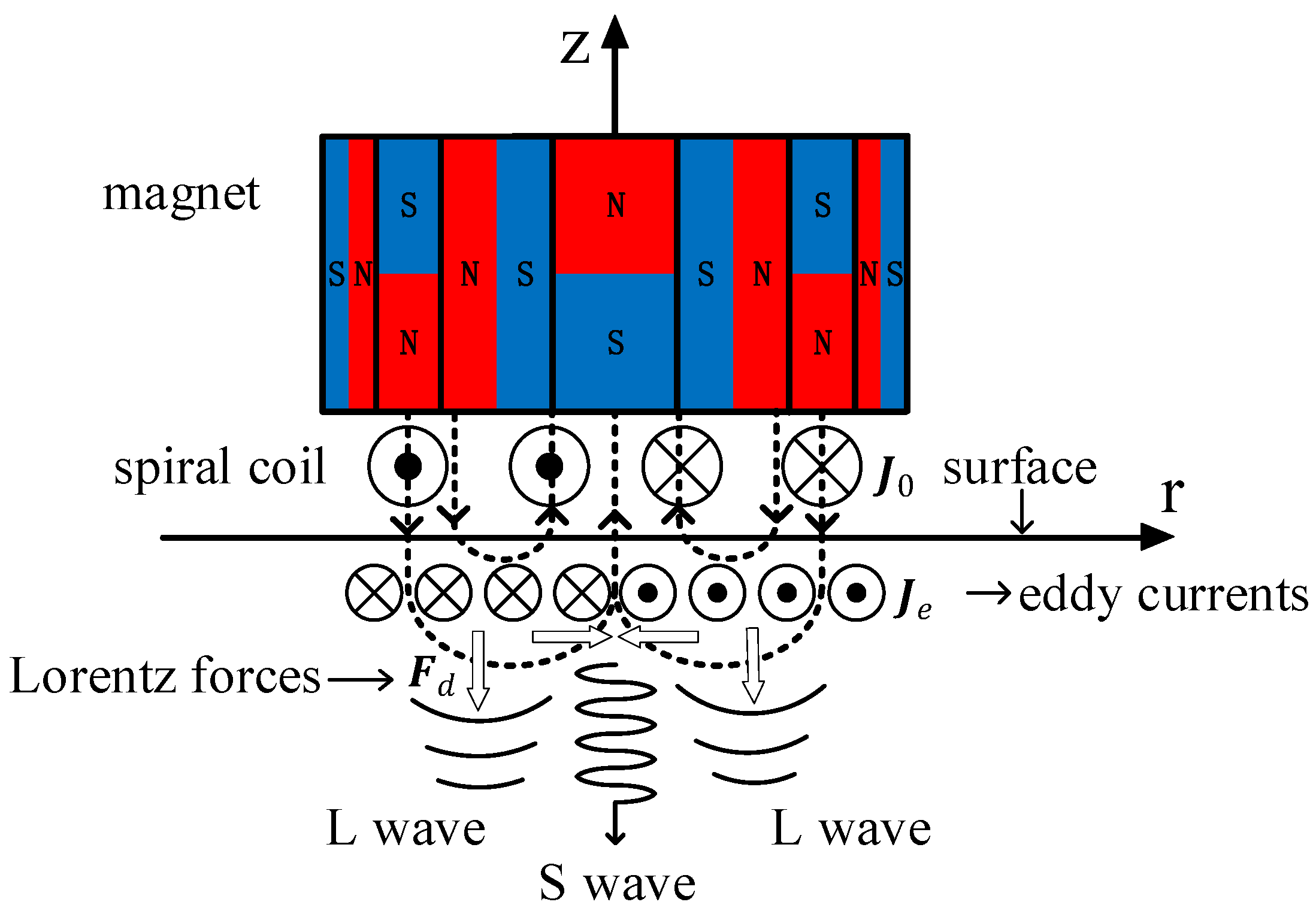
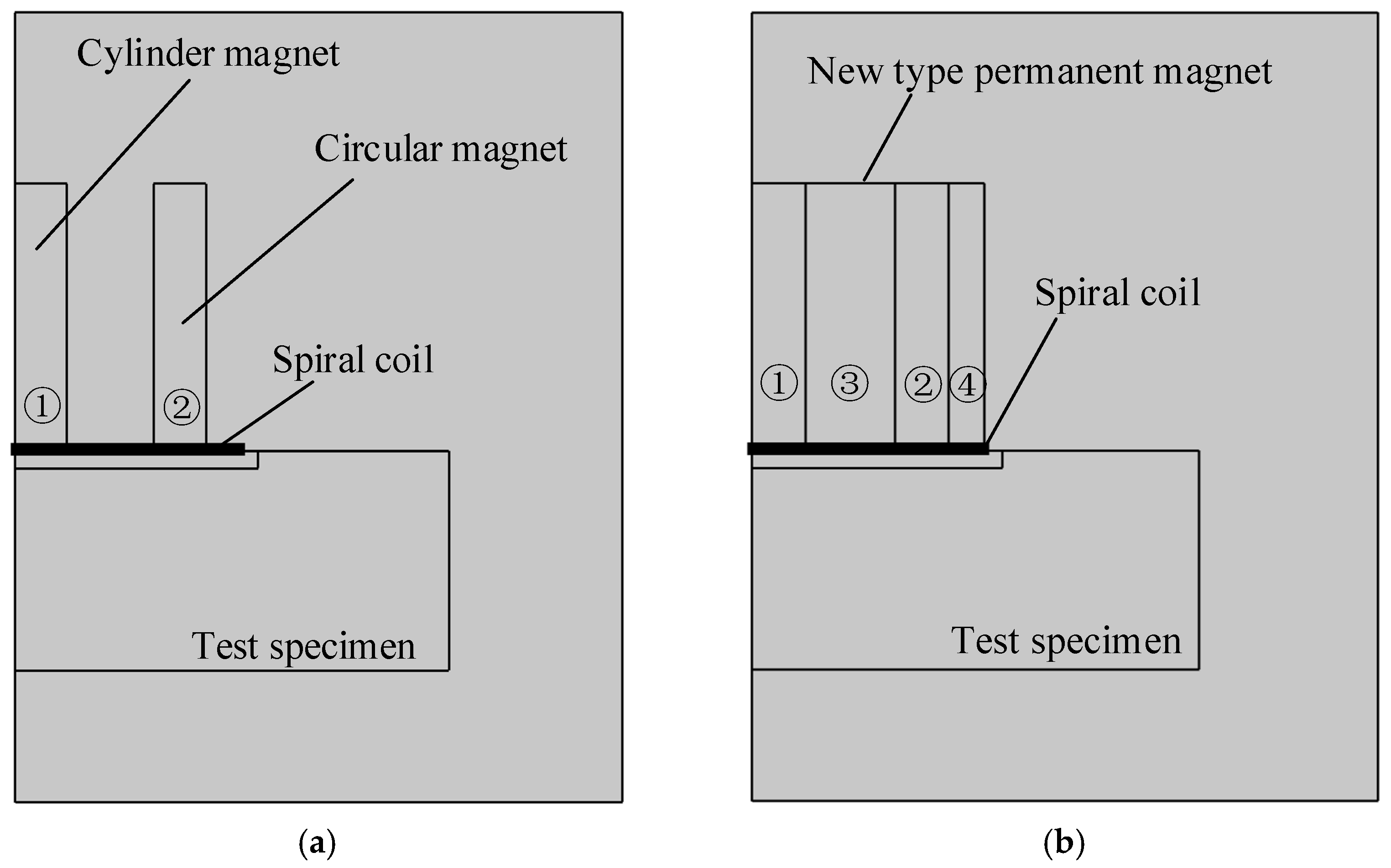
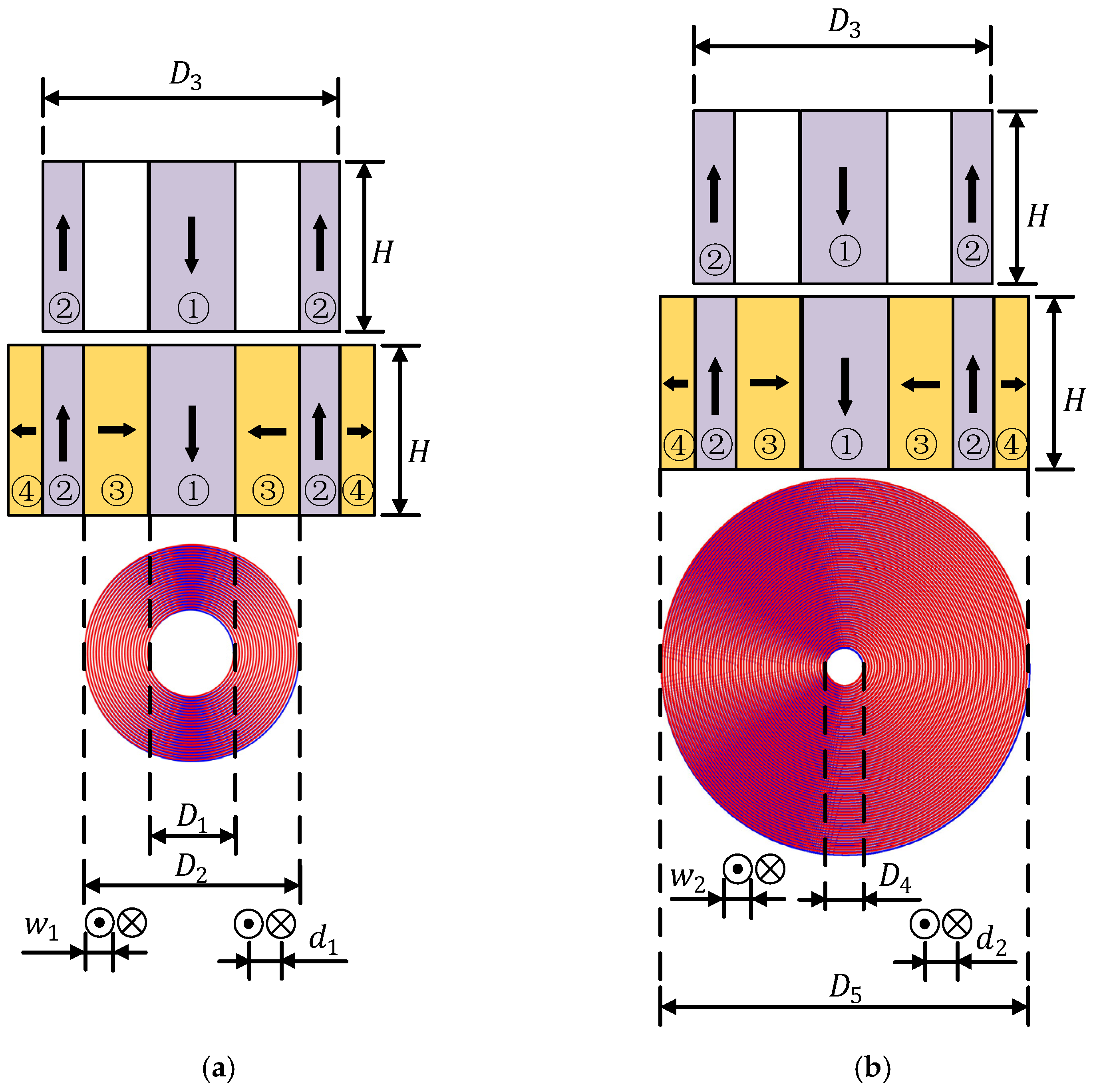
2. Configuration and Operating Principle of the Proposed Flux-Concentrating EMAT
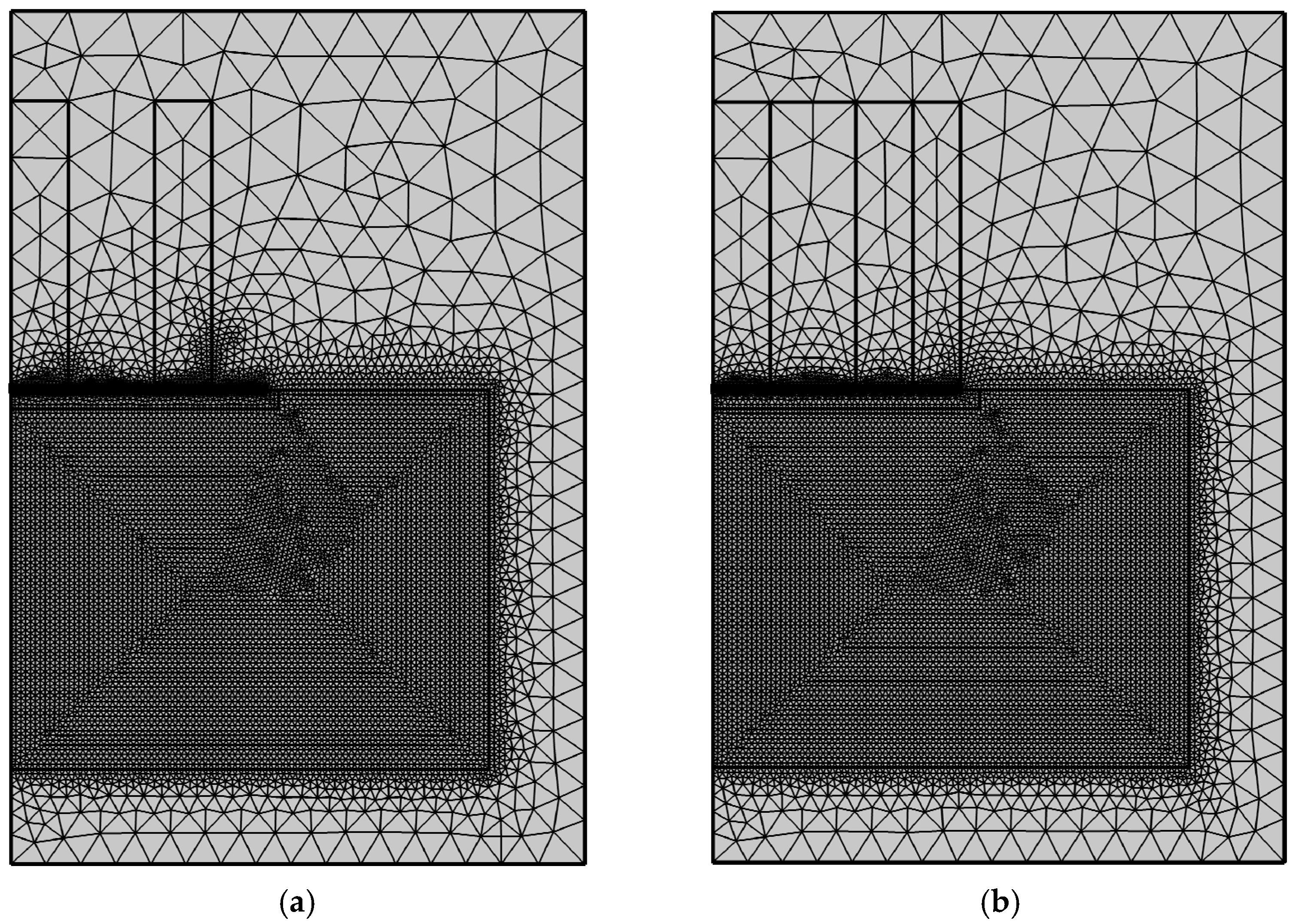
3. Simulation Analysis
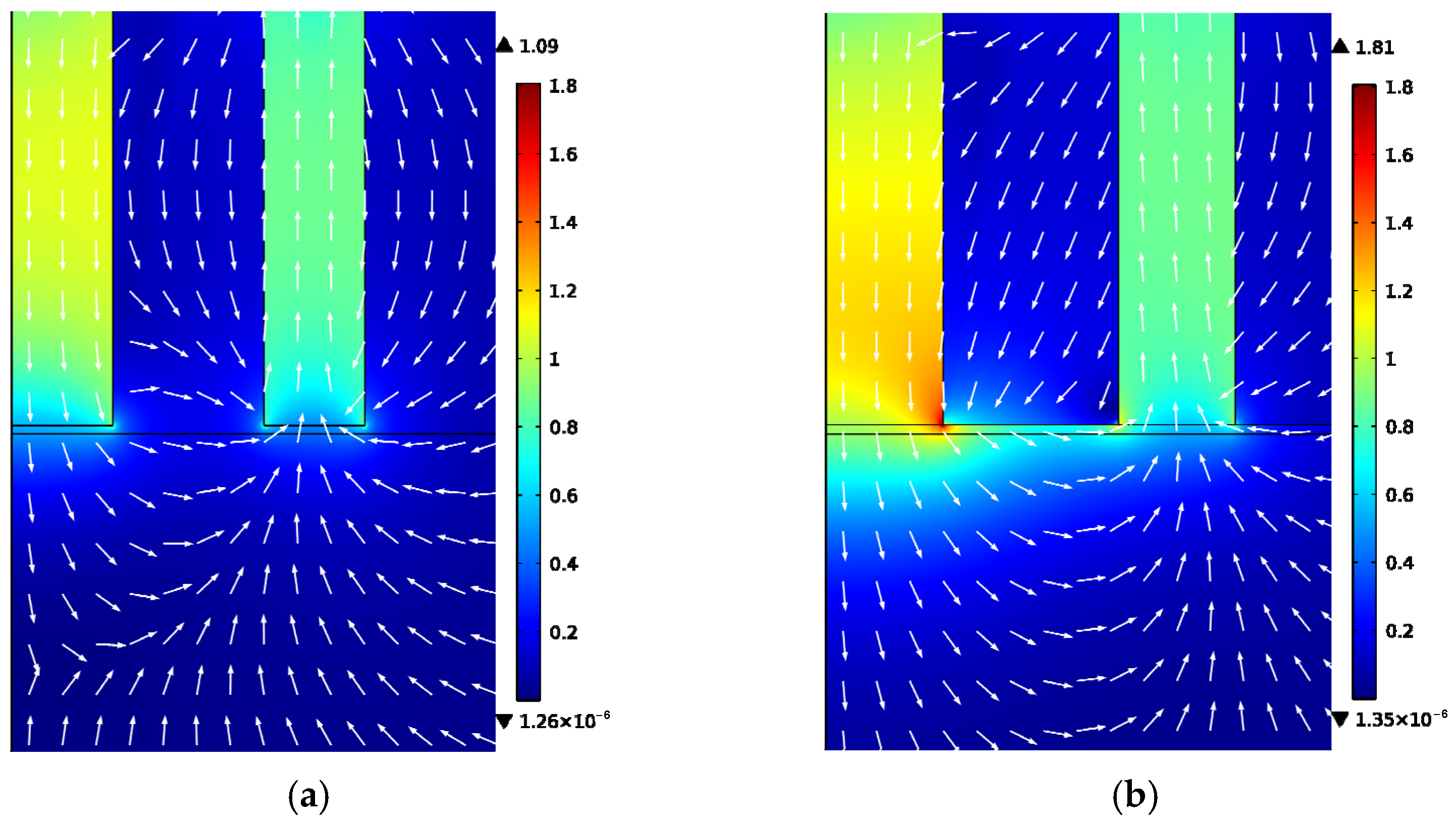
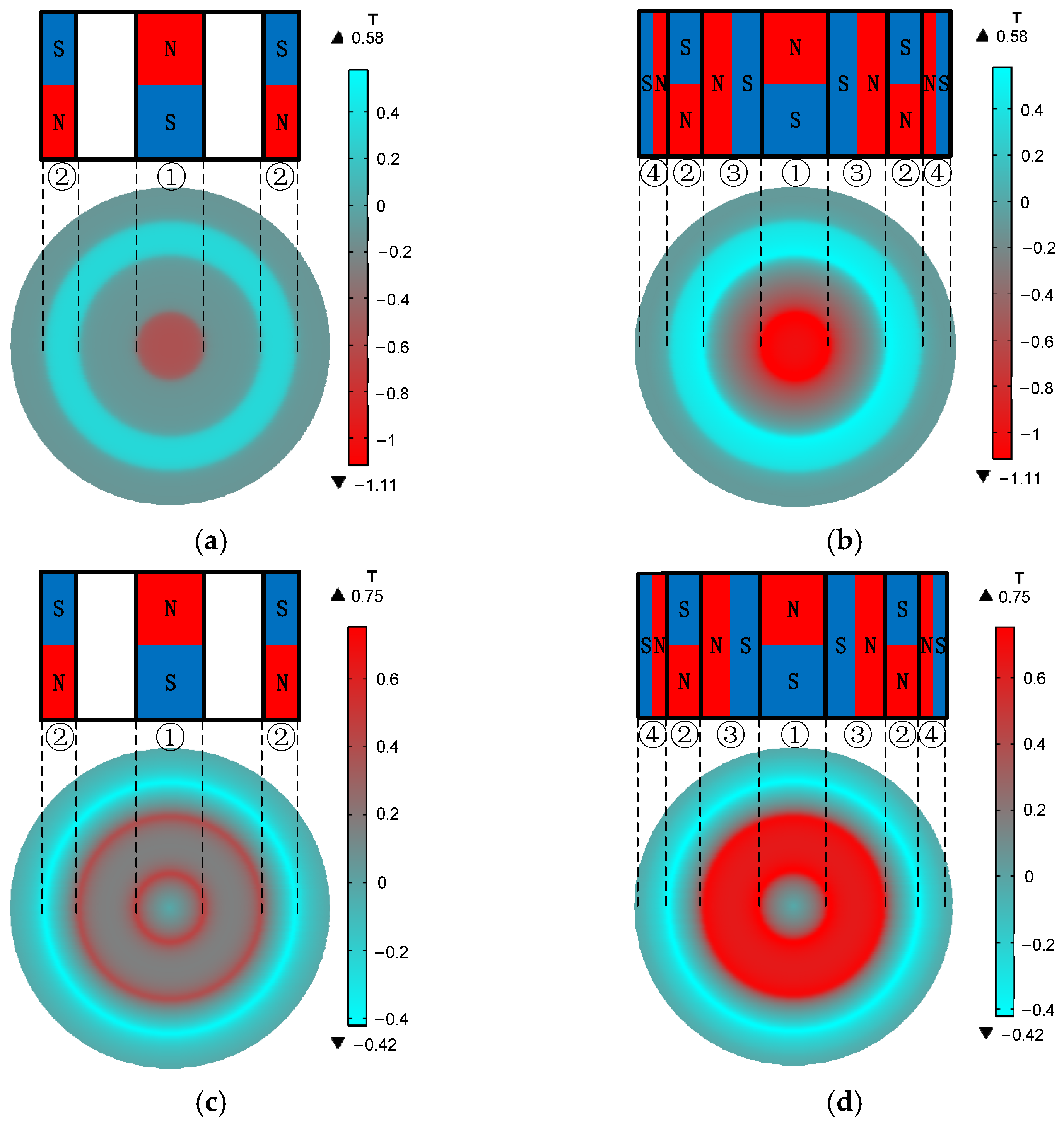
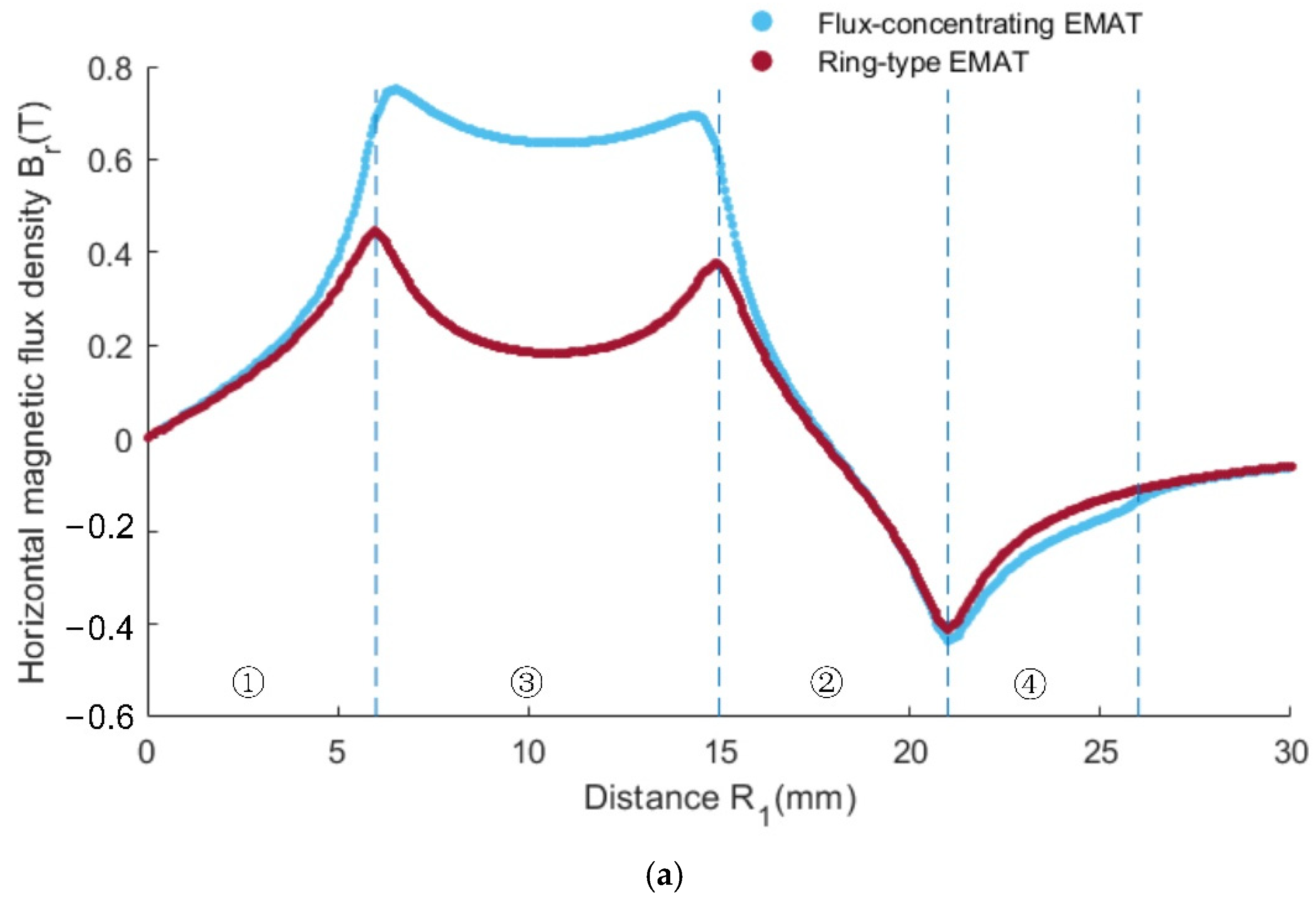
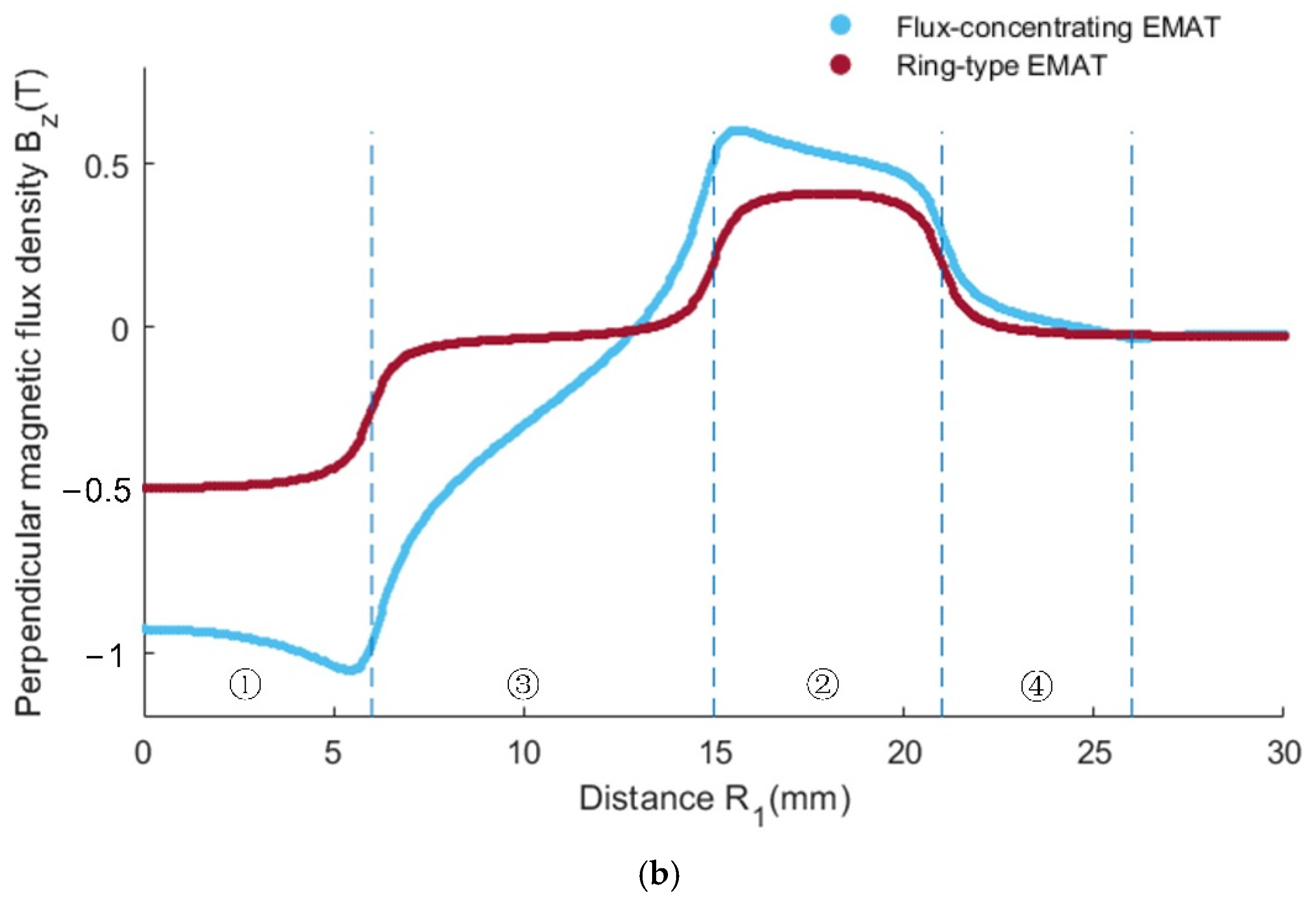
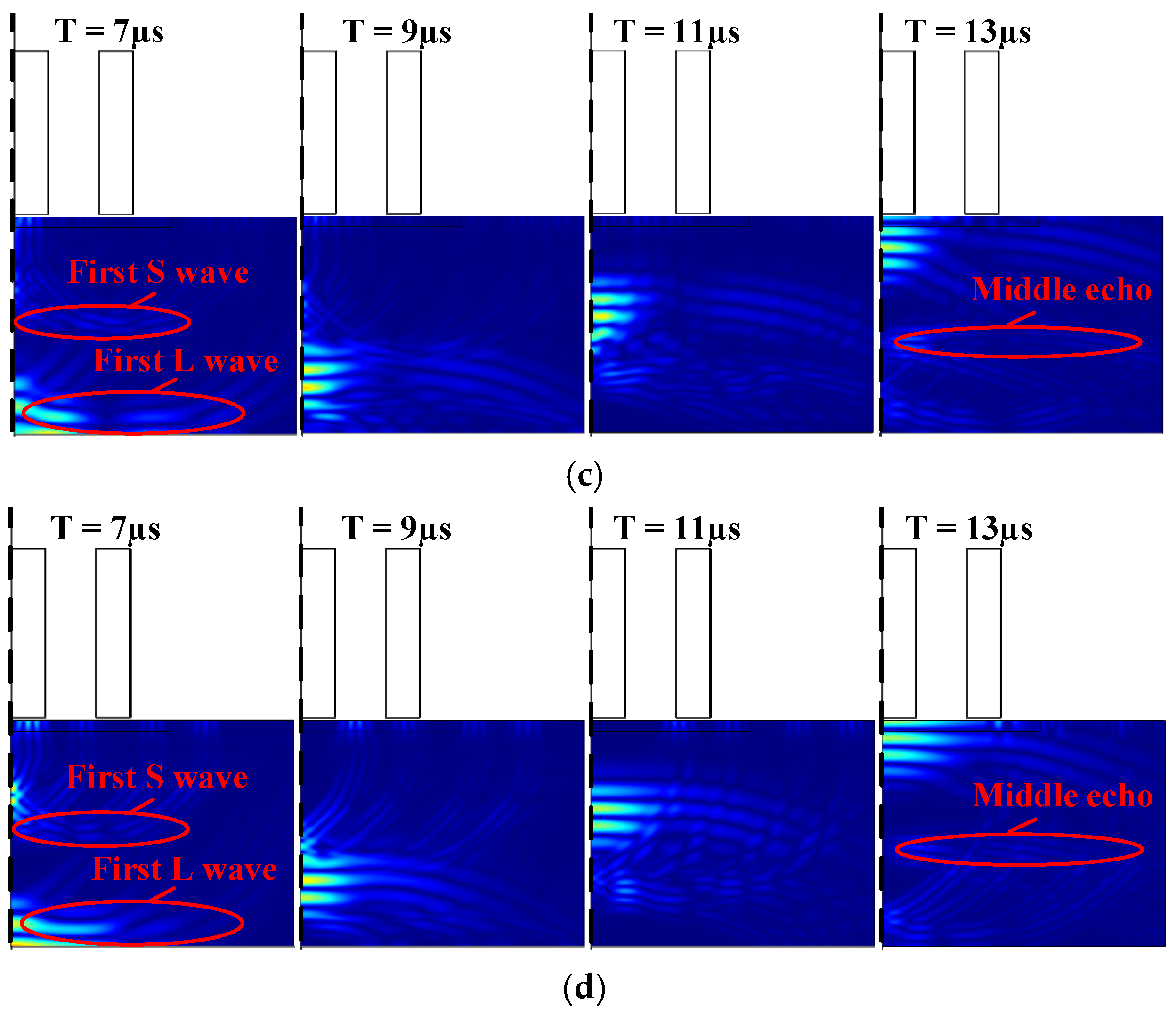
3.1. Dynamic Magnetic Field in Specimen
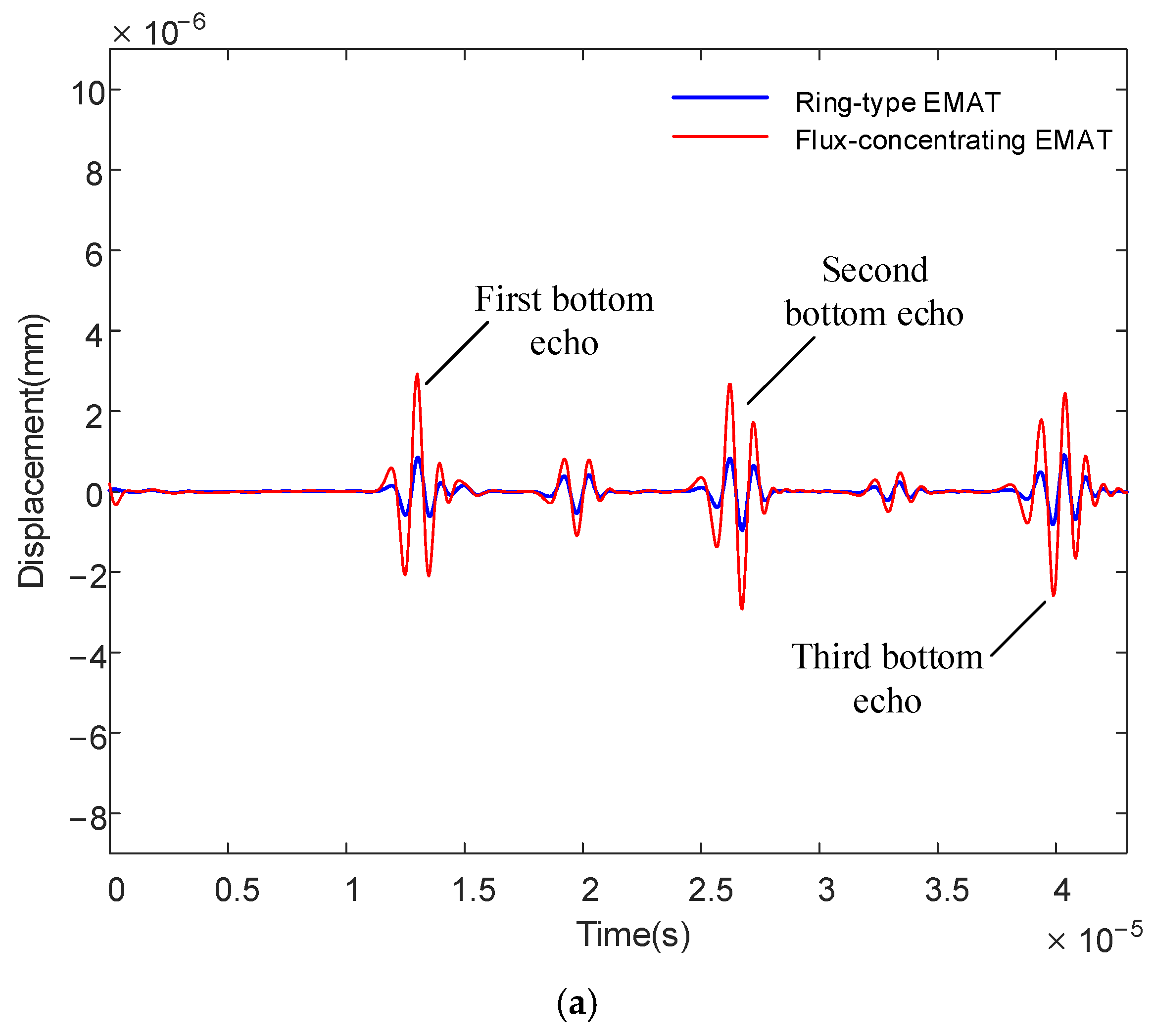
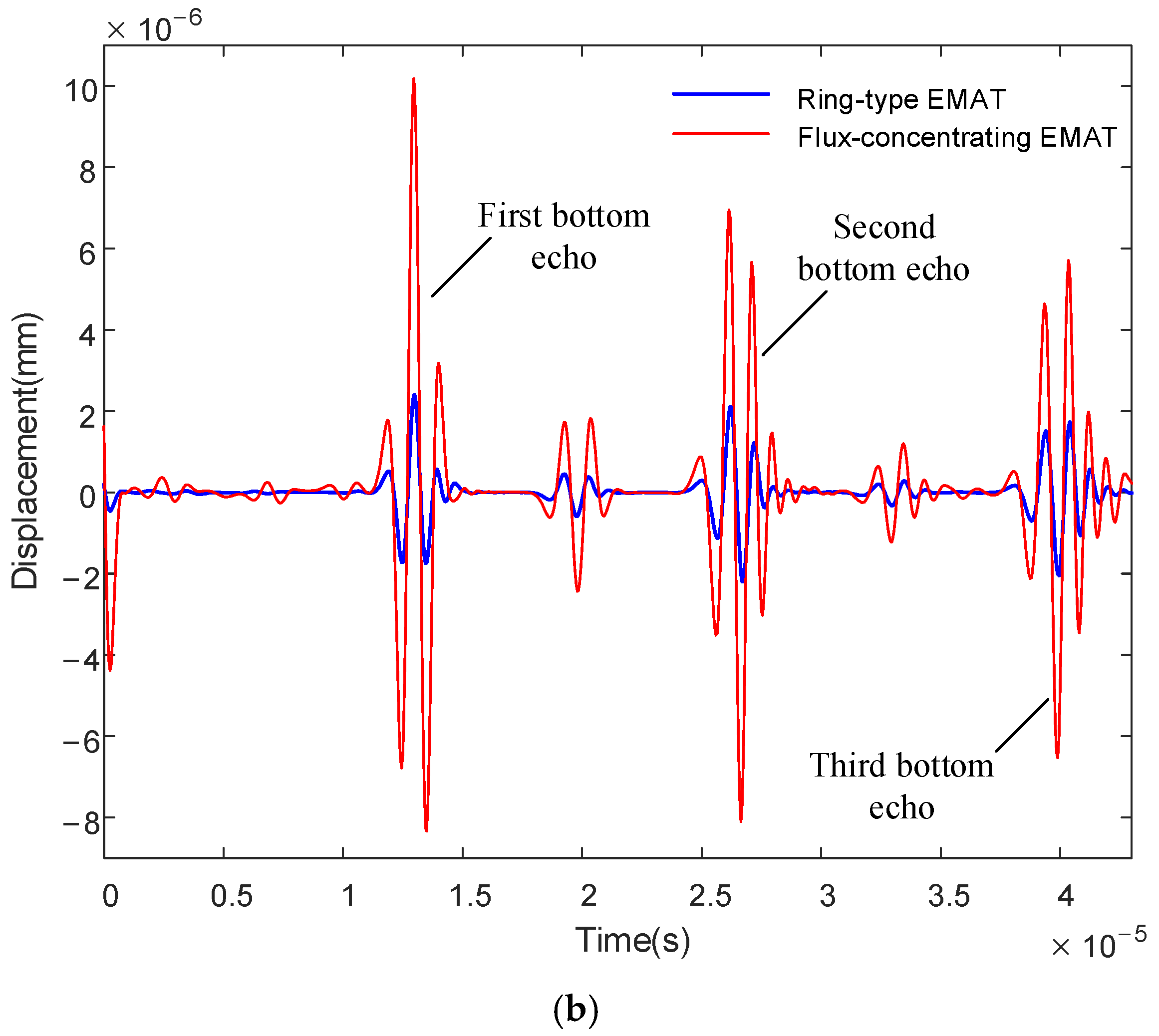
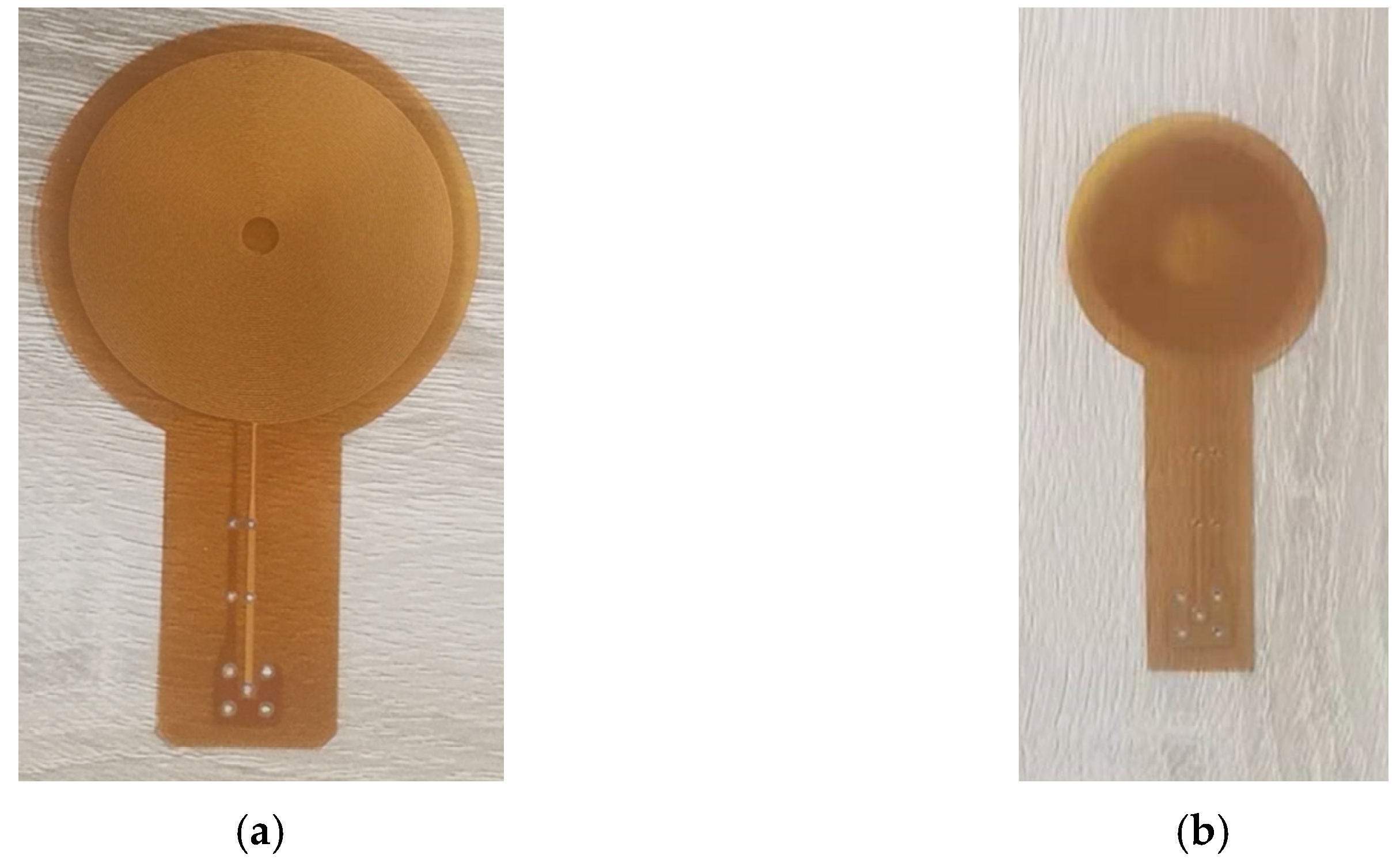
3.2. Coil Design and Simulation of EMAT Signals
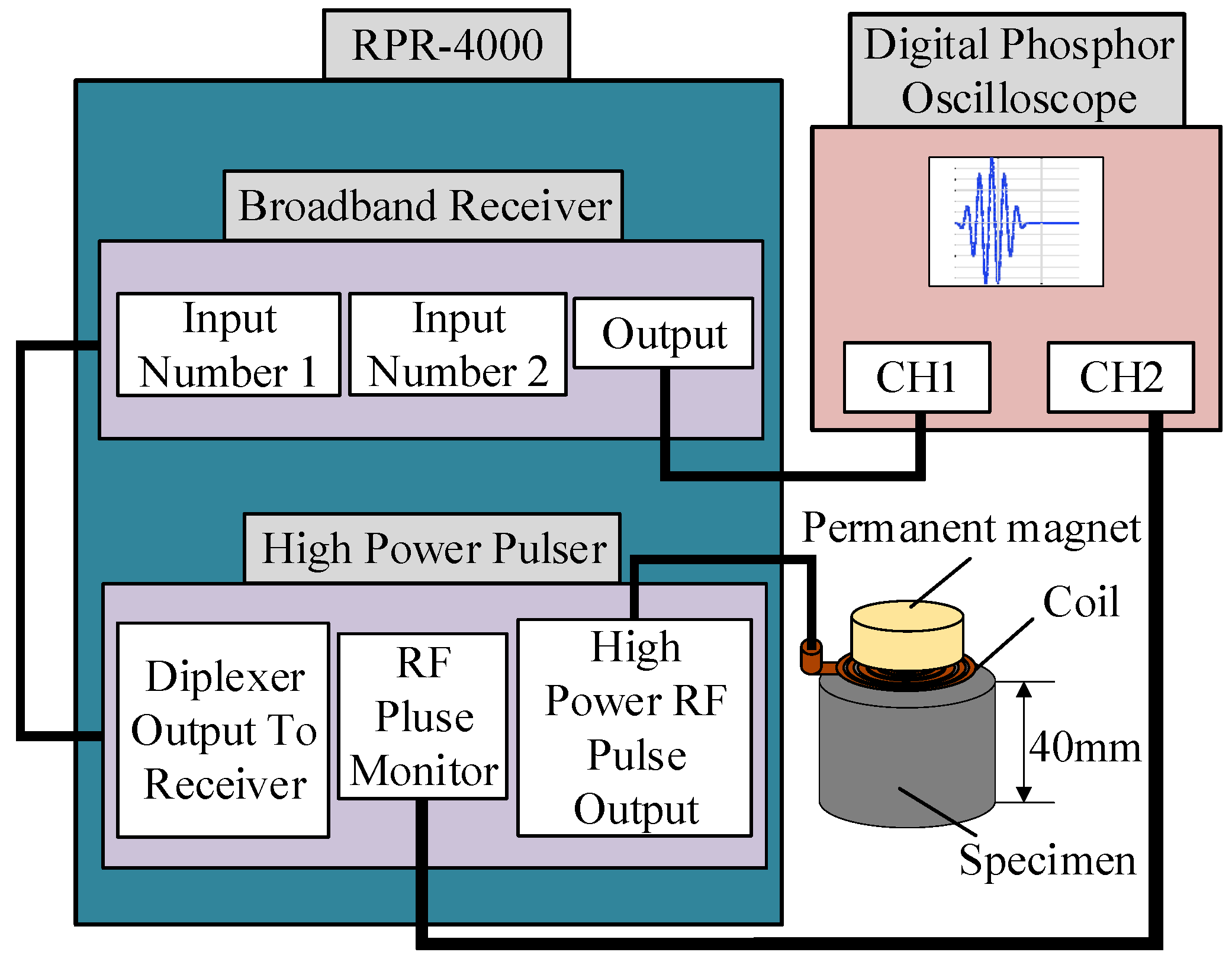
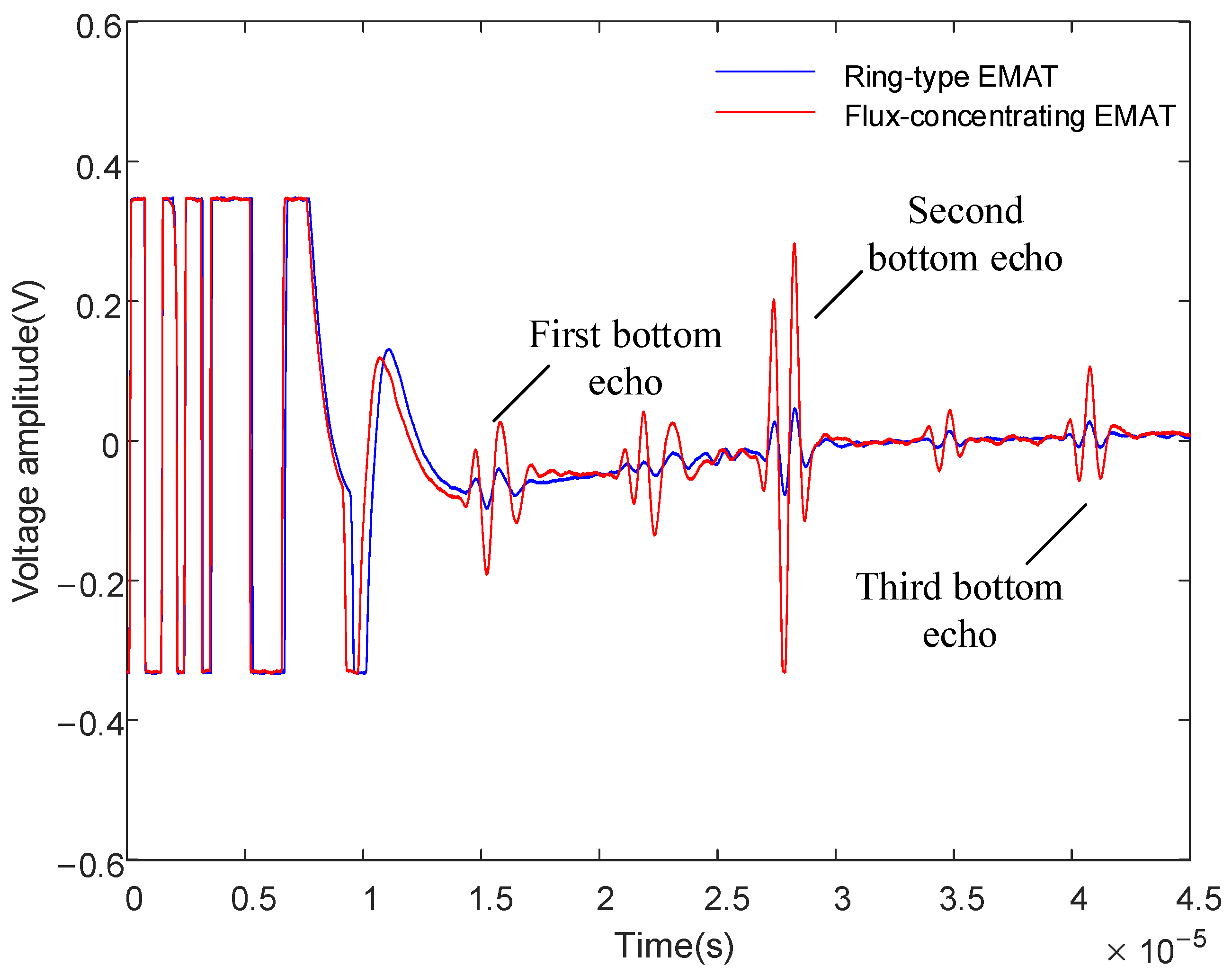
4. Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Sun, H.; Huang, S.; Wang, Q.; Wang, S.; Zhao, W. Orthogonal Optimal Design Method for Point-Focusing EMAT Considering Focal Area Dimensions. Sens. Actuators A Phys. 2020, 312, 112109. [Google Scholar] [CrossRef]
- Hirao, M.; Ogi, H. Introduction. In Electromagnetic Acoustic Transducers: Noncontacting Ultrasonic Measurements Using EMATs; Hirao, M., Ogi, H., Eds.; Springer: Tokyo, Japan, 2017; pp. 1–11. [Google Scholar]
- Pei, C.; Zhao, S.; Xiao, P.; Chen, Z. A modified meander-line-coil EMAT design for signal amplitude enhancement. Sens. Actuators A Phys. 2016, 247, 539–546. [Google Scholar] [CrossRef]
- Baskaran, G.; Balasubramaniam, K.; Lakshmana Rao, C. Shear-wave time of flight diffraction (S-TOFD) technique. NDT E Int. 2006, 39, 458–467. [Google Scholar] [CrossRef]
- Parra-Raad, J.; Khalili, P.; Cegla, F. Shear waves with orthogonal polarisations for thickness measurement and crack detection using EMATs. NDT E Int. 2020, 111, 102212. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.; Min, J.; Cho, Y. Defects Inspection in Wires by Nonlinear Ultrasonic-Guided Wave Generated by Electromagnetic Sensors. Appl. Sci. 2020, 10, 4479. [Google Scholar] [CrossRef]
- Zhang, K.; Yi, P.; Li, Y.; Hui, B.; Zhang, X. A New Method to Evaluate Surface Defects with an Electromagnetic Acoustic Transducer. Sensors 2015, 15, 17420–17432. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Urayama, R.; Uchimoto, T.; Takagi, T.; Hashimoto, M. Small electromagnetic acoustic transducer with an enhanced unique magnet configuration. NDT E Int. 2020, 110, 102205. [Google Scholar] [CrossRef]
- Tagawa, A.; Ueda, M.; Yamashita, T. Development of the ISI Device for Fast Breeder Reactor MONJU Reactor Vessel. J. Power Energy Syst. 2006, 1, 3–12. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, W.; Li, N.; Qian, Z.; Wang, B.; Liu, D.; Li, X. Design of a new type of omnidirectional shear-horizontal EMAT by the use of half-ring magnets and PCB technology. Ultrasonics 2021, 115, 106465. [Google Scholar] [CrossRef]
- Shankar, S.; Balasubramaniam, K. Characterising the beam formation of SH waves using double-row Staggered Halbach EMAT configurations. NDT E Int. 2021, 121, 102465. [Google Scholar] [CrossRef]
- Shimizu, H.; Bahr, A.J. Improved Design for Non-Contacting Electromagnetic-Acoustic Transducers. In Proceedings of the 1977 Ultrasonics Symposium, Menlo Park, CA, USA, 26–28 October 1977; pp. 89–93. [Google Scholar]
- Zhai, G.; Liang, B.; Li, X.; Ge, Y.; Wang, S. High-temperature EMAT with double-coil configuration generates shear and longitudinal wave modes in paramagnetic steel. NDT E Int. 2022, 125, 102572. [Google Scholar] [CrossRef]
- Chaki, S.; Corneloup, G.; Lillamand, I.; Walaszek, H. Combination of Longitudinal and Transverse Ultrasonic Waves for In Situ Control of the Tightening of Bolts. J. Press. Vessel. Technol. 2006, 129, 383–390. [Google Scholar] [CrossRef]
- Chen, P.; He, X.; Wang, X. Ultrasonic Measurement of Axial Stress Using High-Frequency Cylindrical Guided Wave. IEEE Sens. J. 2020, 21, 6691–6697. [Google Scholar] [CrossRef]
- Chen, P.; He, X.; Song, W. Parameter Recognition of Mode-Converted Wave in Single-Source Ultrasound Using Gabor Transform for Bolt Axial Stress Evaluation. J. Sens. 2020, 2020, 8883845. [Google Scholar] [CrossRef]
- Liu, H.; Liu, T.; Li, Y.; Liu, Y.; Zhang, X.; Wang, Y.; Gao, S. Uniaxial stress in-situ measurement using EMAT shear and longitudinal waves: Transducer design and experiments. Appl. Acoust. 2021, 175, 107781. [Google Scholar] [CrossRef]
- Ding, X.; Wu, X.; Wang, Y. Bolt axial stress measurement based on a mode-converted ultrasound method using an electromagnetic acoustic transducer. Ultrasonics 2014, 54, 914–920. [Google Scholar] [CrossRef]
- Hirao, M.; Ogi, H. Available EMATs. In Electromagnetic Acoustic Transducers: Noncontacting Ultrasonic Measurements Using EMATs; Hirao, M., Ogi, H., Eds.; Springer: Tokyo, Japan, 2017; pp. 39–67. [Google Scholar]
- Cunha, M.P.D.; Jordan, J.W. Improved longitudinal EMAT transducer for elastic constant extraction. In Proceedings of the 2005 IEEE International Frequency Control Symposium and Exposition, Vancouver, BC, Canada, 29–31 August 2005; pp. 426–432. [Google Scholar]
- Wu, X.; Ding, X.; Wang, L. An improved longitudinal wave EMAT based on the shielding effect. Int. J. Appl. Electromagn. Mech. 2014, 45, 227–233. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, S.; Tu, J.; Song, X. An improved design of shear horizontal guided wave electromagnetic acoustic transducer. Insight-Non-Destr. Test. Cond. Monit. 2020, 62, 494–497. [Google Scholar] [CrossRef]
- Xu, Y.; Tagawa, A.; Ueda, M.; Yamashita, T.; Ohtsuka, Y.; Osafune, K.; Nishikawa, M. A New Structure of SH Wave Electromagnetic Acoustic Transducer (EMAT). In Acoustical Imaging; Springer: Dordrecht, The Netherlands, 2004; pp. 175–183. [Google Scholar]
- Li, Y.; Liu, T.; Liu, Y.; Liu, H.; Wang, Y. Measurement of Elastic Constants Using Halbach Array Enhanced EMAT. In Proceedings of the 2019 IEEE International Ultrasonics Symposium (IUS), Glasgow, UK, 6–9 October 2019. [Google Scholar]
- Jia, X.; Ouyang, Q.; Zhang, X. An Improved Design of the Spiral-Coil EMAT for Enhancing the Signal Amplitude. Sensors 2017, 17, 1106. [Google Scholar] [CrossRef] [Green Version]
- Jian, X.; Dixon, S.; Grattan, K.T.V.; Edwards, R.S. A model for pulsed Rayleigh wave and optimal EMAT design. Sens. Actuators A Phys. 2006, 128, 296–304. [Google Scholar] [CrossRef]
- Ren, W.; He, J.; Dixon, S.; Xu, K. Enhancement of EMAT’s efficiency by using silicon steel laminations back-plate. Sens. Actuators A Phys. 2018, 274, 189–198. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Magnet Number | Magnet Parameters | Symbol | Value (mm) |
|---|---|---|---|
| 1 | Diameter | 12 | |
| Height | 30 | ||
| 2 | Inner diameter | 32 | |
| Outer diameter | 44 | ||
| Height | 30 | ||
| 3 | Inner diameter | 12 | |
| Outer diameter | 32 | ||
| Height | 30 | ||
| 4 | Inner diameter | 44 | |
| Outer diameter | 52 | ||
| Height | 30 |
| Coil Type | Size Parameters | Symbol | Value (mm) |
|---|---|---|---|
| L-mode coil | Inner diameter | 12 | |
| Outer diameter | 32 | ||
| Wire width | 0.2 | ||
| Wire spacing | 0.2 | ||
| Dual-mode coil | Inner diameter | 5 | |
| Outer diameter | 52 | ||
| Wire width | 0.2 | ||
| Wire spacing | 0.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, W.; Li, B.; Tu, J.; Liao, C.; Wu, Q.; Feng, S.; Song, X. A New Design of the Dual-Mode and Pure Longitudinal EMAT by Using a Radial-Flux-Focusing Magnet. Sensors 2022, 22, 1316. https://doi.org/10.3390/s22041316
Zhang X, Li W, Li B, Tu J, Liao C, Wu Q, Feng S, Song X. A New Design of the Dual-Mode and Pure Longitudinal EMAT by Using a Radial-Flux-Focusing Magnet. Sensors. 2022; 22(4):1316. https://doi.org/10.3390/s22041316
Chicago/Turabian StyleZhang, Xu, Weiwen Li, Bo Li, Jun Tu, Chunhui Liao, Qiao Wu, Sheng Feng, and Xiaochun Song. 2022. "A New Design of the Dual-Mode and Pure Longitudinal EMAT by Using a Radial-Flux-Focusing Magnet" Sensors 22, no. 4: 1316. https://doi.org/10.3390/s22041316