
A Survey of 3D Indoor Localization Systems and Technologies



Abstract
:1. Introduction
- Section 2: We discuss different 3D localization techniques such as geometric approaches like AoA, ToA and TDoA. Moreover, we discuss fingerprinting approaches as they are one of the widely used methods based on metrics such as RSS, CSI, MF and FTM. Furthermore, we discuss the principles of sensor fusion and specifically filtering approaches such as Kalman and Particle Filtering as well as cooperative positioning and PDR. To conclude this section, we discuss the fusion of positioning approaches, also known as hybrid positioning systems and existing systems found in the literature.
- Section 3: We provide a variety of technologies, with a focus on wireless technologies that may be utilized for 3D indoor localization such as WiFi, Bluetooth, UWB, mmWave, visible light and sound-based technologies such as acoustic signals and ultrasound. We analyze the advantages and disadvantages of each technology item primarily focusing the discussion on their applicability for 3D localization.
- Section 4: We discuss the principles of machine learning for 3D indoor localization and provide various existing systems reported to date in the literature.
- Section 5: We provide a critical discussion and conclusions concerning the survey.
2. 3D Localization Techniques
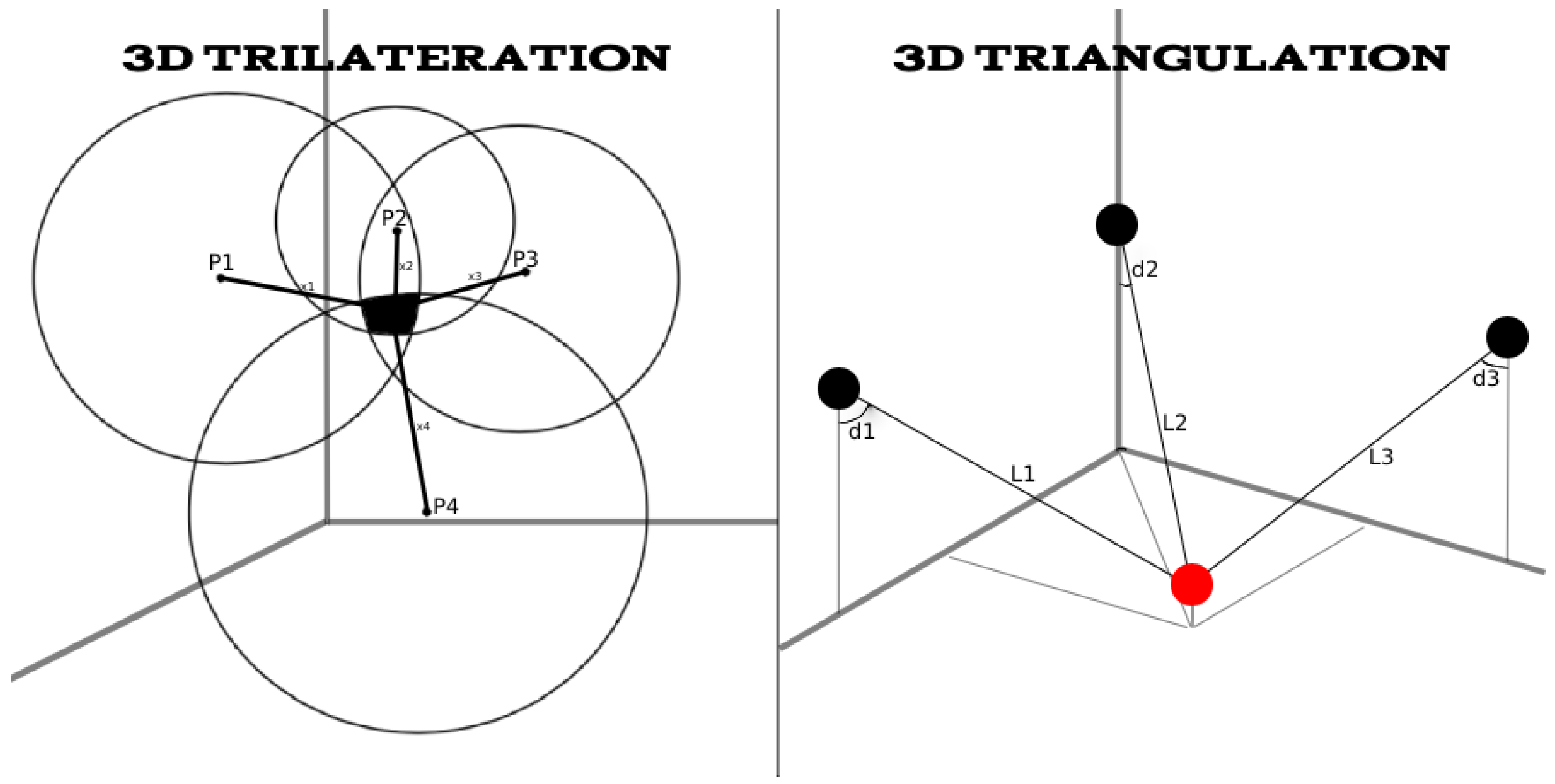
2.1. Geometric Approach
2.1.1. Angle-Distance
2.1.2. Angle of Arrival—AoA
2.1.3. Time of Arrival—ToA
2.1.4. Time Difference of Arrival—TDoA

{kind=link}
{kind=link}
| Technique | Advantages | Disadvantages | Accuracy | Ref. |
|---|---|---|---|---|
| AoA | -Do not require clock synchronization | -Accurate angle measurements may require additional equipment such as directional antenna to support the system which will increase the cost. | 1.4 m | [25] |
| ToA | -The distances between reference node and target node when increased do not affect the accuracy | -Weak synchronization of time -Multipath propagation -Low SNR will reduce the resolution of ToA measurements | 0.05 m 0.8 m | [30] [31] |
| TDoA | -Similar to ToA | -Similar to ToA | 0.13 m | [35] |
2.2. Fingerprinting Approaches
2.2.1. RSS-Based Fingerprinting
2.2.2. CSI-Based Fingerprinting
2.2.3. Magnetic Field-Based Fingerprinting
| Technique | Advantages | Disadvantages | Accuracy | Ref. |
|---|---|---|---|---|
| RSS | -Simple to set up and use -Low cost as it does not require additional hardware | -Suffers from poor accuracy in NLOS conditions -Very laborious | 0.73 m 2.2 m | [42] [43] |
| CSI | -Immune to noises and fading | -Insufficient synchronization which may lead to error | 0.97 m 2.02 m | [49] [51] |
| MF | -Cost- and energy-efficient while maintaining similar precision -Relies on built-in EMF sensors on smartphones without the need for additional equipment | -MF anomalies can only affect specific types of environments | 0.5–1.5 m | [52] |
| FTM | -Does not require offline training, which saves significant labour | -Performs poorly in NLOS and multipath propagation scenarios | 1.11 m | [53] |
2.2.4. Fine Time Measurement-Based Fingerprinting
2.3. Sensor Fusion
- Complementary: Sensors give independent types of information about the environment. Sensors are not directly reliant on each other, but can be combined to provide a more comprehensive image of the area of interest. This fixes the issue of sensor data inadequacy. In general, fusing complementary data is simple since data from different sensors may be added to one other. A complementary configuration would be the use of numerous cameras, each watching different sections of a room.
- Competitive/redundant: Sensors are designed competitively if each sensor provides independent measurements of the same property. Competitive configuration is often distinguished by either fusion of the data from different sensors or the fusion of measurements from a single sensor obtained at different instants.
- Cooperative: A cooperative sensor network leverages information from two (or more) independent sensors to extract information that would not be obtainable from a single sensor. Stereoscopic vision is an example of a cooperative sensor configuration—by integrating two-dimensional images from two cameras at slightly different angles to form a three-dimensional image of the scene.
- Distributed: Information is sent between nodes at a set communication rate (e.g., every five scans)
- Decentralized: There is no communication between the sensor nodes. In decentralized systems, every node makes its own decision. The final behavior of the system is the aggregate of the decisions of the individual nodes.
- Centralized: All sensors send data to a single node. The centralized system is a subset of the distributed scheme in which the sensors interact with each other every scan.
2.3.1. Filtering Approaches
Kalman Filter
Particle Filter
Pedestrian Dead Reckoning—PDR
2.3.2. Cooperative Positioning
| Technique | Advantages | Disadvantages | Accuracy | Ref. |
|---|---|---|---|---|
| KF | -Capable of handling Non-linear models -Low computational complexity | -Designed for Gaussian noises | 0.6 m 0.4 m | [41] [68] |
| PF | -Capable of handling non-Gaussian and non-linear estimations -Methodologically simple and flexible | -Number of particles is a trade-off between computational complexity and accuracy -Issue of filter initialization [80] | 1.4 m | [42] |
| Cooperative | -Incorporates the sensors within the smart devices to communicate and share data with one another -Cost-efficient as no additional hardware is required | -Computational complexity, communication bottlenecks, scalability and lack of robustness against failure [80] | 0.3–0.8 m | [79] |
| PDR | -Can be used to enhance other positioning techniques by expanding the range into places where other positioning systems are inaccessible | -Possible IMU sensor errors -Estimation errors increase with the distance to the known initial position | 1.24 m | [75] |
2.4. Hybrid 3D Positioning Systems
2.4.1. ToA/AoA
2.4.2. PDR/Fingerprinting
3. Machine Learning for 3D Indoor Positioning
4. Technologies for 3D Localization
4.1. Wi-Fi
4.2. Bluetooth
4.3. Cellular (2G–6G)
4.4. Ultra-Wideband
4.5. mmWave
4.6. Visible Light
4.7. Sound-Based Technologies
4.7.1. Ultrasound
4.7.2. Audible Sound
| Technology | Approach | Advantages | Disadvantages | Accuracy | Ref. |
|---|---|---|---|---|---|
| Wi-Fi | -RSS FP -CSI FP -RTT -FP + Barometer -FTM | -Simple to set up and use -Low cost as it does not require additional hardware | -Suffers from poor accuracy in NLOS conditions -Low accuracy when compared to other technologies | 2.90 m 0.97 m 1.15 m 1.20 m 0.5–1.5 m | [36] [51] [90] [91] [52] |
| Bluetooth | -GLS + Barometer | -Easy to set up -Easy to operate -Inexpensive -Low energy consumption | -Difficult to calibrate each BLE beacon -Need extra hardware, medium accuracy -Prone to radio interference | 1.97 m | [93] |
| Cellular | -FP -ToA/AoA -PDR | -Can be implemented with existing hardware in smart devices -No interference with other devices which operate at same frequency | -Low reliability due to varying signal propagation conditions -Requires synchronized base stations | 0.16 m 1 m 3 m | [94] [95] [96] |
| Magnetic Field | -FP | -Cost- and energy-efficient while maintaining similar precision -Relies on built-in EMF sensors on smartphones without the need for additional equipment | -MF anomalies can only affect specific types of environments | 0.5–1.5 m | [52] |
| UWB | -TWTF -ToA -TDoA -TOF | -High accuracy positioning even in the presence of severe multipath -Does not interfere with existing RF systems | -Need extra hardware -Expensive compared to other technologies | 0.1 m 0.05–0.1 m 0.07 m 0.32 m | [102] [103] [104] [105] |
| mmWave | -ToA/AoA | -Higher transmission rate -Large bandwidth -Low interference | -More expensive -Compatibility issue, not all devices are able to support mmWave -Higher power consumption | 0.15 m 0.6 m | [108] [111] |
| VLC | -RSP -PDOA/RSS -Trilateration | -Not affected due to EM radiations from RF systems -Easy to install -Performs well in LOS conditions | -Performs poor in NLOS conditions -Has interference issues from other ambient light sources -Short range | 0.3 m 0.03 m 0.5 m | [111] [113] [115] |
| Ultrasound | -High accuracy at close range distances | -Highly prone to NLOS propagation and multipath effects -Receiver and transmitter need to see each other directly | 0.02 m | [53] | |
| Audible | -Widely supported -Works well in a wide variety of environments | -Can be heard by humans -Position is computed only when the user requests it -Performs poorly in NLOS conditions | 0.6 m | [123] |
| Technology | Reception Range | Availability | Energy Efficiency | Cost | Scalability | Ref. |
|---|---|---|---|---|---|---|
| Wi-Fi | 45 m | High | Low | Low | High | [2,81,118] |
| Bluetooth | 100 m | High | High | Low | Low | |
| Cellular | 1 km | High | Low | Low | High | |
| Magnetic Field | ∼ | High | High | Low | Medium | |
| UWB | 10–20 m | Medium | Low | High | Medium | |
| mmWave | 10–20 m | Low | Low | High | Medium | |
| VLC | 1.4 km | Low | Low | Medium | High | |
| Ultrasound | 20 m | Low | Medium | High | High | |
| Audible | 2 m | High | Medium | Medium | High |
5. Critical Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sand, S.; Dammann, A.; Mensing, C. References. In Positioning in Wireless Communications Systems; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 233–244. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Sun, R.; Wang, J.; Cheng, Q.; Mao, Y.; Ochieng, W.Y. A New IMU-Aided Multiple GNSS Fault Detection and Exclusion Algorithm for Integrated Navigation in Urban Environments. GPS Solut. 2021, 25, 147. [Google Scholar] [CrossRef]
- Mao, Y.; Sun, R.; Wang, J.; Cheng, Q.; Kiong, L.C.; Ochieng, W.Y. New Time-Differenced Carrier Phase Approach to GNSS/INS Integration. GPS Solut. 2022, 26, 122. [Google Scholar] [CrossRef]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A Survey of Enabling Technologies for Network Localization, Tracking, and Navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef] [Green Version]
- Shi, G.; Ming, Y. Survey of Indoor Positioning Systems Based on Ultra-wideband (UWB) Technology. In Wireless Communications, Networking and Applications; Springer: New Delhi, India, 2016; pp. 1269–1278. [Google Scholar] [CrossRef]
- Radaelli, L.; Jensen, C.S. Towards fully organic indoor positioning. In Proceedings of the Fifth ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Orlando, FL, USA, 5 November 2013; pp. 16–20. [Google Scholar]
- Pankaj, L. Indoor Positioning and Indoor Navigation (IPIN) Market Outlook: 2025. Available online: alliedmarketresearch.com (accessed on 26 November 2022).
- Indoor Location Market. Available online: marketsandmarkets.com (accessed on 26 November 2022).
- Laoudias, C.; Raspopoulos, M.; Christoforou, S.; Kamilaris, A. Privacy-Preserving Presence Tracing for Pandemics Via Machine-to-Machine Exposure Notifications. In Proceedings of the 2022 23rd IEEE International Conference on Mobile Data Management (MDM), Paphos, Cyprus, 6–9 June 2022; pp. 355–360. [Google Scholar] [CrossRef]
- Han, C.; Zhu, X.; Doufexi, A.; Kocak, T. Location-Aided Multi-User Beamforming for 60 GHz WPAN Systems. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Akbar, N.; Yan, S.; Yang, N.; Yuan, J. Mitigating Pilot Contamination through Location-Aware Pilot Assignment in Massive MIMO Networks. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Muppirisetty, L.S.; Svensson, T.; Wymeersch, H. Spatial Wireless Channel Prediction under Location Uncertainty. IEEE Trans. Wirel. Commun. 2016, 15, 1031–1044. [Google Scholar] [CrossRef]
- Luo, J.; Han, Y.; Fan, L. Underwater Acoustic Target Tracking: A Review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farr, N.; Bowen, A.; Ware, J.; Pontbriand, C.; Tivey, M. An integrated, underwater optical /acoustic communications system. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, T.; Yan, L.; Han, G.; Peng, Y. Fast and Accurate Underwater Acoustic Horizontal Ranging Algorithm for an Arbitrary Sound-Speed Profile in the Deep Sea. IEEE Internet Things J. 2022, 9, 755–769. [Google Scholar] [CrossRef]
- Bourdoux, A.; Barreto, A.N.; van Liempd, B.; de Lima, C.; Dardari, D.; Belot, D.; Lohan, E.S.; Seco-Granados, G.; Sarieddeen, H.; Wymeersch, H.; et al. 6G White Paper on Localization and Sensing. arXiv 2020, arXiv:2006.01779. [Google Scholar] [CrossRef]
- Wang, D.; Fattouche, M.; Zhan, X. Pursuance of mm-Level Accuracy: Ranging and Positioning in mmWave Systems. IEEE Syst. J. 2019, 13, 1169–1180. [Google Scholar] [CrossRef]
- Shahmansoori, A.; Garcia, G.E.; Destino, G.; Seco-Granados, G.; Wymeersch, H. Position and Orientation Estimation Through Millimeter-Wave MIMO in 5G Systems. IEEE Trans. Wirel. Commun. 2018, 17, 1822–1835. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Shen, Y.; Zhang, X.P.; Win, M.Z.; Meng, H. Performance Limits and Geometric Properties of Array Localization. IEEE Trans. Inf. Theory 2016, 62, 1054–1075. [Google Scholar] [CrossRef] [Green Version]
- Bensky, A. Wireless Positioning Technologies and Applications; Artech House, Inc.: Norwood, MA, USA, 2007. [Google Scholar]
- Brás, L.; Carvalho, N.; Pinho, P.; Kulas, L.; Nyka, K. A Review of Antennas for Indoor Positioning Systems. Int. J. Antennas Propag. 2012, 2012, 953269. [Google Scholar] [CrossRef]
- Kanhere, O.; Rappaport, T.S. Position Locationing for Millimeter Wave Systems. arXiv 2018, arXiv:1808.07094. [Google Scholar] [CrossRef]
- Zhu, Z.; Bocus, M.Z. A Computationally Efficient Method for Direction Finding with Known Transmit Sequence. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Z. AoA-Based Three-Dimensional Positioning and Tracking Using the Factor Graph Technique. Symmetry 2020, 12, 1400. [Google Scholar] [CrossRef]
- Hacioglu, G.; Sesli, E. Improved RSS Based Distance Estimation for Autonomous Vehicles. Wirel. Pers. Commun. 2022, 125, 325–350. [Google Scholar] [CrossRef]
- Gonendik, E.; Gezici, S. Fundamental Limits on RSS Based Range Estimation in Visible Light Positioning Systems. IEEE Commun. Lett. 2015, 19, 2138–2141. [Google Scholar] [CrossRef] [Green Version]
- Coluccia, A.; Fascista, A. On the Hybrid ToA/RSS Range Estimation in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2018, 17, 361–371. [Google Scholar] [CrossRef]
- Obeidat, H.; Ahmad, I.; Rawashdeh, M.R.; Abdullah, A.A.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R.A. Enhanced ToA Estimation Using OFDM over Wide-Band Transmission Based on a Simulated Model. Wirel. Pers. Commun. 2022, 123, 3449–3461. [Google Scholar] [CrossRef]
- Khalaf-Allah, M. Novel Solutions to the Three-Anchor ToA-Based Three-Dimensional Positioning Problem. Sensors 2021, 21, 7325. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Tian, L. ToA-based NLOS error mitigation algorithm for 3D indoor localization. China Commun. 2020, 17, 63–72. [Google Scholar] [CrossRef]
- Plank, H.; Egger, T.; Steffan, C.; Steger, C.; Holweg, G.; Druml, N. High-performance indoor positioning and pose estimation with time-of-flight 3D imaging. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Kaune, R. Accuracy studies for TDoA and ToA localization. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 408–415. [Google Scholar]
- Comparison of Time-Difference-of-Arrival and Angle-of-Arrival Methods of Signal Geolocation; ITU: Geneva, Switzerland, 2011.
- Passafiume, M.; Collodi, G.; Ciervo, E.; Cidronali, A. A Novel TDoA-Based Method for 3D Combined Localization Techniques Using an Ultra-Wideband Phase Wrapping-Impaired Switched Beam Antenna. Electronics 2021, 10, 2137. [Google Scholar] [CrossRef]
- Alhammadi, A.; Alraih, S.; Hashim, F.; Rasid, M.F.A. Robust 3D Indoor Positioning System Based on Radio Map Using Bayesian Network. In Proceedings of the 2019 IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019; pp. 107–110. [Google Scholar] [CrossRef]
- Du, Y.; Arslan, T.; Juri, A. Camera-aided region-based magnetic field indoor positioning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Pendão, C.; Moreira, A. FastGraph—Organic 3D Graph for Unsupervised Location and Mapping. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Raspopoulos, M. Multidevice Map-Constrained Fingerprint-Based Indoor Positioning Using 3-D Ray Tracing. IEEE Trans. Instrum. Meas. 2018, 67, 466–476. [Google Scholar] [CrossRef]
- Berkovich, G. Accurate and reliable real-time indoor positioning on commercial smartphones. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 670–677. [Google Scholar] [CrossRef]
- Yang, J.; Lee, H.; Moessner, K. Multilateration localization based on Singular Value Decomposition for 3D indoor positioning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Jaworski, W.; Wilk, P.; Zborowski, P.; Chmielowiec, W.; Lee, A.Y.; Kumar, A. Real-time 3D indoor localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Gansemer, S.; Hakobyan, S.; Püschel, S.; Großmann, U. 3D WLAN indoor positioning in multi-storey buildings. In Proceedings of the 2009 IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, Rende, Italy, 21–23 September 2009; pp. 669–672. [Google Scholar] [CrossRef]
- AlShamaa, D.; Mourad-Chehade, F.; Honeine, P. Localization of sensors in indoor wireless networks: An observation model using WiFi RSS. In Proceedings of the 2018 9th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 26–28 February 2018; pp. 1–5. [Google Scholar]
- Wu, F.; Xing, J.; Dong, B. An indoor localization method based on rssi of adjustable power WiFi router. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Qinhuangdao, China, 18–20 September 2015; pp. 1481–1484. [Google Scholar]
- IEEE Std 802.11n-2009; IEEE Standard for Information technology—Local and metropolitan area networks—Specific requirements—Part 11: Wireless LAN Medium Access Control (MAC)and Physical Layer (PHY) Specifications Amendment 5: Enhancements for Higher Throughput. IEEE: Piscataway, NJ, USA, 2009; pp. 1–565. [CrossRef]
- Dang, X.; Tang, X.; Hao, Z.; Liu, Y. A device-free indoor localization method using CSI with Wi-Fi signals. Sensors 2019, 19, 3233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rocamora, J.M.; Ho, I.W.H.; Mak, W.; Lau, A. Survey of CSI Fingerprinting-based indoor positioning and mobility tracking systems. IET Signal Process. 2020, 14, 407–419. [Google Scholar] [CrossRef]
- Li, Y.; Nie, W.; He, W.; Wang, Y.; Yang, X. UAV 3D Localization System Using CSI. In Proceedings of the 2021 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Nanjing, China, 23–26 May 2021; pp. 1–3. [Google Scholar] [CrossRef]
- Stop the Occurrence of “Black Flight” through UAV Reaction Technology. 1999. Available online: sma818.com (accessed on 26 November 2022).
- Karmanov, I.; Zanjani, F.G.; Merlin, S.; Kadampot, I.; Dijkman, D. WiCluster: Passive Indoor 2D/3D Positioning using WiFi without Precise Labels. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021. [Google Scholar]
- Hellmers, H.; Eichhorn, A.; Norrdine, A.; Blankenbach, J. IMU/magnetometer based 3D indoor positioning for wheeled platforms in NLoS scenarios. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Xu, S.; Li, W.; Wu, Y.; Zhou, H. Precise 3-D Indoor Localization Based on Wi-Fi FTM and Built-In Sensors. IEEE Internet Things J. 2020, 7, 11753–11765. [Google Scholar] [CrossRef]
- Hiertz, G.R.; Denteneer, D.; Stibor, L.; Zang, Y.; Costa, X.P.; Walke, B. The IEEE 802.11 universe. IEEE Commun. Mag. 2010, 48, 62–70. [Google Scholar] [CrossRef]
- Han, K.; Yu, S.; Kim, S.L. Smartphone-based Indoor Localization Using Wi-Fi Fine Timing Measurement. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 28 November 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Si, M.; Wang, Y.; Xu, S.; Sun, M.; Cao, H. A Wi-Fi FTM-Based Indoor Positioning Method with LOS/NLOS Identification. Appl. Sci. 2020, 10, 956. [Google Scholar] [CrossRef] [Green Version]
- Si, M.; Wang, Y.; Seow, C.K.; Cao, H.; Liu, H.; Huang, L. An Adaptive Weighted Wi-Fi FTM-Based Positioning Method in an NLOS Environment. IEEE Sens. J. 2022, 22, 472–480. [Google Scholar] [CrossRef]
- Poulose, A.; Kim, J.; Han, D. A Sensor Fusion Framework for Indoor Localization Using Smartphone Sensors and Wi-Fi RSSI Measurements. Appl. Sci. 2019, 9, 4379. [Google Scholar] [CrossRef] [Green Version]
- Chauhan, K.; Chauhan, R.K.; Saini, A. Chapter 11—Medical image fusion methods: Review and application in cardiac diagnosis. In Image Processing for Automated Diagnosis of Cardiac Diseases; Chauhan, K., Chauhan, R.K., Eds.; Academic Press: Cambridge, MA, USA, 2021; pp. 195–215. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks. Int. J. Robot. Res. 2002, 21, 735–760. [Google Scholar] [CrossRef]
- Zheng, L.; Zhou, W.; Tang, W.; Zheng, X.; Peng, A.; Zheng, H. A 3D indoor positioning system based on low-cost MEMS sensors. Simul. Model. Pract. Theory 2016, 65, 45–56. [Google Scholar] [CrossRef]
- Pastell, M.; Frondelius, L.; Järvinen, M.; Backman, J. Filtering methods to improve the accuracy of indoor positioning data for dairy cows. Biosyst. Eng. 2018, 169, 22–31. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME–J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Ebner, F.; Fetzer, T.; Deinzer, F.; Köping, L.; Grzegorzek, M. Multi sensor 3D indoor localisation. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–11. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion and Target Recognition VI, Orlando, FL, USA, 21–24 April 1997; Kadar, I., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1997; Volume 3068, pp. 182–193. [Google Scholar] [CrossRef]
- Wan, E.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Wang, R.; Zheng, L.; Wu, D.; Peng, A.; Tang, B.; Lu, H.; Shi, H.; Zheng, H. Research on multiple gait and 3D indoor positioning system. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Liang, Q.; Lin, J.; Liu, M. Towards Robust Visible Light Positioning Under LED Shortage by Visual-inertial Fusion. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Ristic, B. Particle Filters for Random Set Models; Springer: Berlin/Heidelberg, Germany, 2013; Volume 798. [Google Scholar]
- Jiménez, A.; Seco, F. Comparing Decawave and Bespoon UWB location systems: Indoor/outdoor performance analysis. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing ubisense, bespoon and decawave uwb location systems: Indoor performance analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Kaji, K.; Kawaguchi, N. Estimating 3D pedestrian trajectories using stability of sensing signal. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Yu, N.; Zhan, X.; Zhao, S.; Wu, Y.; Feng, R. A Precise Dead Reckoning Algorithm Based on Bluetooth and Multiple Sensors. IEEE Internet Things J. 2018, 5, 336–351. [Google Scholar] [CrossRef]
- Cho, Y.S.; Ji, M.I.; Kim, J.Y.; Jeon, J.I. High-scalable 3D indoor positioning algorithm using loosely-coupled Wi-Fi/sensor integration. In Proceedings of the 2015 17th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Republic of Korea, 1–3 July 2015; pp. 96–99. [Google Scholar] [CrossRef]
- Inderst, F.; Pascucci, F.; Santoni, M. 3D pedestrian dead reckoning and activity classification using waist-mounted inertial measurement unit. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A.R. Smartphone-Based Cooperative Indoor Localization with RFID Technology. Sensors 2018, 18, 266. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House: Norwood, MA, USA, 2003. [Google Scholar]
- Wang, S.; Jiang, X. Three-Dimensional Cooperative Positioning in Vehicular Ad-hoc Networks. IEEE Trans. Intell. Transp. Syst. 2021, 22, 937–950. [Google Scholar] [CrossRef]
- Xiaoxuan, W.; Peng, S.; Minlin, C.; Hucheng, W.; Zhi, W. A 3-D Cooperative Base Station Localization Method Applied in Large Complex Indoor Environment. Sensors 2021, 21, 1002. Available online: https://ceur-ws.org/Vol-2498/short49.pdf (accessed on 26 November 2022).
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.S.; Nurmi, J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef]
- Guo, X.; Ansari, N.; Hu, F.; Shao, Y.; Nkrow, R.; Li, L. A Survey on Fusion-Based Indoor Positioning. IEEE Commun. Surv. Tutor. 2019, 22, 566–594. [Google Scholar] [CrossRef]
- Lu, Y.; Koivisto, M.; Talvitie, J.; Valkama, M.; Lohan, E.S. EKF-based and Geometry-based Positioning under Location Uncertainty of Access Nodes in Indoor Environment. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, P.; Lan, H.; Zhuang, Y.; Niu, X.; El-Sheimy, N. A modularized real-time indoor navigation algorithm on smartphones. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Nessa, A.; Adhikari, B.; Hussain, F.; Fernando, X.N. A Survey of Machine Learning for Indoor Positioning. IEEE Access 2020, 8, 214945–214965. [Google Scholar] [CrossRef]
- Clark, R.; Trigoni, N.; Markham, A. Robust Vision-Based Indoor Localization. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks (IPSN ’15), Seattle, WA, USA, 14–16 April 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 378–379. [Google Scholar] [CrossRef]
- Peng, P.; Yu, C.; Xia, Q.; Zheng, Z.; Zhao, K.; Chen, W. An Indoor Positioning Method Based on UWB and Visual Fusion. Sensors 2022, 22, 1394. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.Q.; Jiang, F.; Huang, Q.H.; Wang, X.Z.; Han, Z.M.; Huang, W.Y. Dual-Graph Attention Convolution Network for 3-D Point Cloud Classification. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Zhang, Z.; Cai, R.; Du, C.; Yu, B.; Yang, D. UWB-based Machine Learning Optimized 3D Positioning Algorithm. In Proceedings of the 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 4–6 March 2022; Volume 6, pp. 1799–1803. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y. A 3D mobile positioning method based on deep learning for hospital applications. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 170. [Google Scholar] [CrossRef]
- Cao, H.; Wang, Y.; Bi, J. Smartphones: 3D Indoor Localization Using Wi-Fi RTT. IEEE Commun. Lett. 2021, 25, 1201–1205. [Google Scholar] [CrossRef]
- Bisio, I.; Sciarrone, A.; Bedogni, L.; Bononi, L. WiFi Meets Barometer: Smartphone-Based 3D Indoor Positioning Method. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Pei, L.; Chen, R.; Liu, J.; Tenhunen, T.; Kuusniemi, H.; Chen, Y. An Inquiry-based Bluetooth indoor positioning approach for the Finnish pavilion at Shanghai World Expo 2010. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 1002–1009. [Google Scholar] [CrossRef]
- Li, H. Low-Cost 3D Bluetooth Indoor Positioning with Least Square. Wirel. Pers. Commun. 2014, 78, 1331–1344. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, J.; Liu, C.; Jia, P. Indoor 3D Dynamic Reconstruction Fingerprint Matching Algorithm in 5G Ultra-Dense Network. KSII Trans. Internet Inf. Syst. 2021, 15, 343–364. [Google Scholar] [CrossRef]
- Sun, B.; Tan, B.; Wang, W.; Valkama, M.; Morlaas, C.; Lohan, E.S. 5G Positioning Based on the Wideband Electromagnetic Vector Antenna. In Proceedings of the WiP Proceedings of the International Conference on Localization and GNSS (ICL-GNSS 2021), Tampere, Finland, 1–3 June 2021. [Google Scholar]
- Shoushtari, H.; Askar, C.; Harder, D.; Willemsen, T.; Sternberg, H. 3D Indoor Localization using 5G-based Particle Filtering and CAD Plans. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Luo, G.; Yuan, Q.; Li, J.; Wang, S.; Yang, F. Artificial Intelligence Powered Mobile Networks: From Cognition to Decision. arXiv 2021, arXiv:2112.04263. [Google Scholar] [CrossRef]
- Säily, M.; Yilmaz, O.N.C.; Michalopoulos, D.S.; Pérez, E.; Keating, R.; Schaepperle, J. Positioning Technology Trends and Solutions Toward 6G. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland, 13–16 September 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Viswanathan, H.; Mogensen, P.E. Communications in the 6G Era. IEEE Access 2020, 8, 57063–57074. [Google Scholar] [CrossRef]
- Wild, T.; Braun, V.; Viswanathan, H. Joint Design of Communication and Sensing for Beyond 5G and 6G Systems. IEEE Access 2021, 9, 30845–30857. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dabove, P.; Di Pietra, V.; Piras, M.; Jabbar, A.A.; Kazim, S.A. Indoor positioning using Ultra-wide band (UWB) technologies: Positioning accuracies and sensors’ performances. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 175–184. [Google Scholar] [CrossRef]
- Ni, D.; Postolache, O.A.; Mi, C.; Zhong, M.; Wang, Y. UWB Indoor Positioning Application Based on Kalman Filter and 3-D ToA Localization Algorithm. In Proceedings of the 2019 11th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 28–30 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, C.; Kuhn, M.; Merkl, B.; Mahfouz, M.; Fathy, A.E. Development of an UWB Indoor 3D Positioning Radar with Millimeter Accuracy. In Proceedings of the 2006 IEEE MTT-S International Microwave Symposium Digest, San Francisco, CA, USA, 11–16 June 2006; pp. 106–109. [Google Scholar] [CrossRef]
- Krapež, P.; Munih, M. Anchor Calibration for Real-Time-Measurement Localization Systems. IEEE Trans. Instrum. Meas. 2020, 69, 9907–9917. [Google Scholar] [CrossRef]
- Lau, L.; Quan, Y.; Wan, J.; Zhou, N.; Wen, C.; Qian, N.; Jing, F. An Autonomous Ultra-Wide Band-Based Attitude and Position Determination Technique for Indoor Mobile Laser Scanning. ISPRS Int. J. Geo-Inf. 2018, 7, 155. [Google Scholar] [CrossRef] [Green Version]
- Hao, Z.; Yan, H.; Dang, X.; Ma, Z.; Jin, P.; Ke, W. Millimeter-Wave Radar Localization Using Indoor Multipath Effect. Sensors 2022, 22, 5671. [Google Scholar] [CrossRef] [PubMed]
- Jia, Y.; Tian, H.; Fan, S.; Liu, B. Motion Feature and Millimeter Wave Multi-path AoA-ToA Based 3D Indoor Positioning. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Li, Y.; Ghassemlooy, Z.; Tang, X.; Lin, B.; Zhang, Y. A VLC smartphone camera based indoor positioning system. IEEE Photonics Technol. Lett. 2018, 30, 1171–1174. [Google Scholar] [CrossRef]
- Bai, B.; Chen, G.; Xu, Z.; Fan, Y. Visible Light positioning based on LED traffic light and photodiode. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Lam, E.; Little, T. Indoor 3D Localization with Low-Cost LiFi Components. In Proceedings of the 2019 Global LIFI Congress (GLC), Paris, France, 12–13 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Plets, D.; Bastiaens, S.; Ijaz, M.; Almadani, Y.; Martens, L.; Raes, W.; Stevens, N.; Joseph, W. Three-dimensional Visible Light Positioning: An Experimental Assessment of the Importance of the LEDs’ Locations. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Du, P.; Chen, C.; Zhong, W.D.; Alphones, A. Robust 3D Indoor VLP System Based on ANN Using Hybrid RSS/PDOA. IEEE Access 2019, 7, 47769–47780. [Google Scholar] [CrossRef]
- Yang, S.; Jeong, E.; Kim, D.; Kim, H.; Son, Y.; Han, S.K. Indoor three-dimensional location estimation based on LED visible light communication. Electron. Lett. 2013, 49, 54–56. [Google Scholar] [CrossRef]
- Joseph, D.; Ijaz, M. Efficient 3D trilateration algorithm for Visible Light positioning. J. Opt. 2019, 21, 05LT01. [Google Scholar]
- Begault, D.R. Audible and inaudible early reflections: Thresholds for auralization system design. In Proceedings of the Audio Engineering Society Convention 100, Copenhagen, Denmark, 11–14 May 1996; Audio Engineering Society: New York, NY, USA, 1996. [Google Scholar]
- Embleton, T.F. Tutorial on sound propagation outdoors. J. Acoust. Soc. Am. 1996, 100, 31–48. [Google Scholar] [CrossRef]
- Brena, R.; García-Vázquez, J.; Galván Tejada, C.; Munoz, D.; Vargas-Rosales, C.; Fangmeyer, J., Jr.; Palma, A. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Mannay, K.; Ureña, J.; Hernández, A.; Machhout, M.; Aguili, T. Characterization of an Ultrasonic Local Positioning System for 3D Measurements. Sensors 2020, 20, 2794. [Google Scholar] [CrossRef] [PubMed]
- Kapoor, R.; Ramasamy, S.; Gardi, A.; Bieber, C.; Silverberg, L.; Sabatini, R. A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation. Sensors 2016, 16, 1637. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Woodman, O.J.; Harle, R.K. Concurrent scheduling in the active bat location system. In Proceedings of the 2010 8th IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Mannheim, Germany, 29 March–2 April 2010; pp. 431–437. [Google Scholar]
- Priyantha, N.B. The Cricket Indoor Location System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Mandal, A.; Lopes, C.; Givargis, T.; Haghighat, A.; Jurdak, R.; Baldi, P. Beep: 3D indoor positioning using audible sound. In Proceedings of the Second IEEE Consumer Communications and Networking Conference (CCNC 2005), Las Vegas, NV, USA, 6 January 2005; pp. 348–353. [Google Scholar] [CrossRef]
- Lopes, S.I.; Vieira, J.M.N.; Albuquerque, D. High Accuracy 3D Indoor Positioning Using Broadband Ultrasonic Signals. In Proceedings of the 2012 IEEE 11th International Conference on Trust, Security and Privacy in Computing and Communications, Liverpool, UK, 25–27 June 2012; pp. 2008–2014. [Google Scholar] [CrossRef]


| 2D | 2-Dimensional | 3D | 3-Dimensional |
|---|---|---|---|
| BLE | Bluetooth Low Energy | CSI | Channel State Information |
| FP | Fingerprinting | FT | Fixed Terminal |
| FTM | Fine Time Measurement | GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System | IMU | Inertial Measurement Unit |
| IoT | Internet of Things | KF | Kalman Filter |
| LBS | Location Based System | LOS | Line of Sight |
| MF | Magnetic Field | ML | Machine Learning |
| mmWave | Millimeter Wave | NLOS | Non-Line of Sight |
| PDoA | Phase Difference of Arrival | PDR | Pedestrian Dead Reckoning |
| PF | Partice Filter | RAT | Radio Access Technology |
| RSS | Received Signal Strength | TDoA | Time Difference of Arrival |
| ToA | Time of Arrival | ToF | Time of Flight |
| TWTF | Two Way Time of Flight | UAV | Unmanned Aerial Vehicle |
| UWB | Ultra Wideband | VLC | Visible Light Communication |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sesyuk, A.; Ioannou, S.; Raspopoulos, M. A Survey of 3D Indoor Localization Systems and Technologies. Sensors 2022, 22, 9380. https://doi.org/10.3390/s22239380
Sesyuk A, Ioannou S, Raspopoulos M. A Survey of 3D Indoor Localization Systems and Technologies. Sensors. 2022; 22(23):9380. https://doi.org/10.3390/s22239380
Chicago/Turabian StyleSesyuk, Andrey, Stelios Ioannou, and Marios Raspopoulos. 2022. "A Survey of 3D Indoor Localization Systems and Technologies" Sensors 22, no. 23: 9380. https://doi.org/10.3390/s22239380