1. Introduction
In recent times, there has been an exponential growth of network-capable devices wirelessly connecting to the grid. Devices communicate over the internet through various means, such as 5G cellular [
1,
2], Wi-Fi, ZigBee, and other network technologies. The advent of technologies, such as the Internet-of-Things (IoT) [
3], gives physical objects of any size IP addresses, and has sprouted further explorations into novel applications, such as connected cars and the internet of drones [
4,
5]. These wireless applications have primarily two methods of connecting to the network, infrastructure-based or peer-to-peer ad hoc-based, and in some cases, a hybrid of both technologies.
Wireless local area networks (WLANs) enable devices to communicate without requiring physical cable links connecting the network. The building blocks of WLANs involve the basic service set (BSS). The BSS can have two different architectures based on the presence or absence of the access point (AP) [
6,
7].
The focus of this study is on ad hoc network characteristic-decentralized topologies with nodes communicating as peers between themselves. In an ad hoc network, a single channel needs to be shared by several nodes, and the medium access control (MAC) protocol [
8,
9,
10] is responsible for the coordination between nodes. With advances in technological development, the physical (PHY) layer is vastly improved with higher data rates and a better quality of service (QoS) [
11,
12,
13,
14]. Although IEEE 802.11 allows the use of multiple channels, IEEE 802.11 MAC protocol is used for handling channel access in a single channel only. Moreover, it is found to be inefficient due to multi-channel hidden terminal problems, which will be discussed later. The approaches to MMAC protocols have been classified as follows [
15,
16,
17]:
The dedicated control channel approach splits the spectrum into one control channel and N-1 data channels where each node has two radio interfaces to operate in the control and data channel. Nodes are aware of the neighbor transmissions and no synchronization is needed. Due to the common control channel, no multi-channel hidden problem exists.
The split phase, as the name suggests, divides the time into two phases—the contention and the data transfer phase. These two phases are fixed and always take place periodically. During the contention phase, all nodes listen to the common control channel, and those that succeed exchange data frames in the data exchange phase. Although the multi-channel hidden terminal is solved and tight global synchronization is needed.
In common hopping, nodes follow a hopping sequence. The nodes that want to communicate stop at a frequency and communicate and then rendezvous with the hopping sequence. Hopping spreads the control signal and congestion is reduced on a particular channel, but tight global synchronization is also needed in this approach.
A parallel rendezvous is similar to the common hopping approach but multiple handshakes occur simultaneously on all free channels.
Although the parallelism of MMAC protocols significantly improves throughput and reduce channel access delay compared to a single-channel approach [
15], there are issues that need to be addressed. The issues that reside in MMAC protocols are as follows:
The multi-channel hidden terminal occurs when two nodes are busy in the data transmission in one channel and are unaware of control packets sent by other nodes that want to communicate on a particular channel. When these nodes return to the control channel, they might want to communicate on that busy channel, causing a collision [
18,
19].
The missing receiver occurs when the control packets sent to a receiver are not acknowledged due to it being busy in the data transmission with another node [
20].
Deafness occurs when the intended receiver is busy in the data transmission and ignores the control packets sent to it [
21].
Generally, the radio antennas of the wireless nodes can operate in one of two modes, omnidirectional or directional. Nodes using omnidirectional antennas can listen to communications and transmit data in all directions. Using omnidirectional antennas is beneficial since the nodes do not need to direct their antennas in a specific direction for communication. This makes omnidirectional antennas easy to install and less expensive. However, the disadvantage of these antennas is that there is less signal strength, which reduces their range. The chances of collision are also higher in this case because the nodes listen to communications from all directions. On the other hand, nodes using directional antennas can only communicate in a specific direction. Using this antenna provides higher connectivity and a longer range. Moreover, it reduces interference and allows multiple communications in close vicinity without interference. Nevertheless, with directional antennas, nodes have a deafness problem. The overall cost and complexities of these antennas are higher than omnidirectional antennas [
22,
23,
24].
The objective of this research is to improve the performance and efficiency of the MMAC protocol and compare it with other protocols with varying factors, namely, the number of stations and channels. The primary contributions of this work are as follows:
We propose an enhanced spectrally efficient asynchronous multi-channel MAC (E-SA-MMAC) protocol that utilizes the spectrum efficiently and increases the overall throughput in constrained environments.
The proposed protocol solves the issues of the multi-channel hidden terminal and deafness by using omnidirectionally broadcast control packets.
Further, a second protocol is proposed called Max-E-SA-MMAC, by modifying the backoff algorithm of the E-SA-MMAC, to improve fairness between the nodes.
An adaptive MMAC protocol is proposed; we took advantage of the performance characteristics of the evaluated protocols by opting for the more ideal transmission mechanism in the changing network environments.
An extensive performance evaluation of the proposed algorithms was carried out under three performance metrics—normalized throughput, Jain’s fairness index (JFI), and channel access delay.
A full factorial design with analysis of variation (ANOVA) was also performed to analyze the impacts of the factors on the results.
The rest of the paper is organized as follows.
Section 2 comprises the literature review of different multi-channel MAC protocols that were studied for this research. The proposed solution of this paper is presented in
Section 3 followed by the simulation, results, and performance evaluation discussion in
Section 4,
Section 5 and
Section 6, respectively. Lastly, the conclusion and future work will be presented in
Section 7.
2. Literature Review
Numerous research was conducted on multi-channel MAC protocols that focus on the use of multiple channels to enhance network performance [
25,
26,
27]. Few researchers have proposed an energy-efficient MMAC protocol [
28,
29,
30,
31], whereas other proposed schemes ensure reliability and fairness [
32,
33,
34]. In this section, we highlight the protocols that were used in this study. The basic contention mechanism of the IEEE 802.11 standard for WLANs has been used in many MMAC protocols. Therefore, we begin with the discussion of the contention mechanism in IEEE 802.11 that uses Carrier-sense multiple access with collision avoidance (CSMA/CA) [
35,
36,
37]. The nodes always sense the medium before transmitting to avoid a collision. Each node selects a random backoff time that is based on uniform distribution between [0, CW) where CW denotes the current contention window. When the channel is found idle, the node decrements the backoff time, and upon reaching 0, transmits its frame. If it finds the channel busy, it pauses its backoff timer until it finds the medium idle again. Upon collision, CW is doubled until
and attempts to transmit the frame until the retry limit is reached. Upon successful transmission, CW is set to
and nodes wait for the DIFS (distributed coordination function interframe space) [
38] time to sense the channel again. The receiver also acknowledges the (ACK frame) reception of data after waiting for the SIFS (short interframe space) time. The issue in this protocol is the time spent in backoff and contention that reduces the throughput of the network [
39,
40].
MMAC improves the throughput significantly by having nodes transmitting on multiple channels [
41]. All channels of the spectrum are orthogonal to each other, meaning transmission in one channel would not interfere with the transmission in another channel. In MMAC protocols, the contention is basically in the control channel and any two nodes winning the contention and deciding on the channel to use, switch to that channel for data transmission. The nodes contend using control frames in the control channel [
16].
The first MMAC protocol considered in this work is a bidirectional multi-channel MAC (BiMMAC) [
42,
43], which uses the IEEE 802.11 MAC protocol to contend in the control channel. Multiple channels are used in BiMMAC where one channel is exclusively used for the control channel and others are used for the data channel. The process of data transmission is divided into two phases, namely the control phase and the data exchange phase. In the control phase, control frames, such as request-to-send (RTS) and clear-to-send (CTS) [
44], are exchanged to negotiate the channel that can be used for data transmission. Another control frame named channel reservation (CRN) is used by the source to announce data transmission to all neighbors of the source to avoid the multi-channel hidden problem. In the data exchange phase, both nodes switch to the negotiated channel for data transmission. After the data are successfully transmitted, the nodes switch back to the control channel. The main feature of BiMMAC is the transmission of two frames in the data channel with a single handshake, i.e., if both nodes have packets to send to one another then they will exchange data frames without the need to contend again. In case the receiver has no data to send, it can send a normal ACK and both nodes switch to the control channel. Due to the extra frame sent by the receiver without contention or control frame exchanges, control overhead is reduced and network throughput is increased. The drawback of this protocol is that the nodes suffer large delays due to the waiting time in exchanging two frames.
The authors of [
45] proposed a collision-free asynchronous MMAC for low-cost and more power-efficient nodes that have a single half-duplex transceiver. One common control channel is used and the rest are used as data channels. The asynchronous multi-channel MAC (AMMAC) differs from the above two protocols due to the reuse of the control channel for data transmission. Contending nodes in the control channel send RTS-CTS control frames, such as other protocols, and also send an additional announce-to-send (ATS) frame to inform the neighbors of both the sender and receiver of the intended data transmission. Nodes switch to the data channel that has been agreed upon during the contention in the control channel. When there is no data channel available, the nodes that win the contention are allowed to send one frame in the control channel. Spectrum utilization is increased due to the use of the control channel for data transmission. Due to this behavior, one mandatory waiting frame time is added to nodes coming back to the control channel for contention. Although an overhead, this ensures nodes returning to the control channel do not collide with ongoing transmission. Therefore, the issue of the multi-channel hidden terminal is solved due to this asynchronous mode of operation. However, the disadvantage of this scheme is that nodes returning to the control channel need to wait a mandatory period before transmitting frames.
The authors of [
46] propose a hybrid and adaptive H-MMAC protocol, which improves the AMMAC protocol in utilizing the control channel for data transmissions as well as extending data transmissions in data channels. Further, H-MMAC utilizes an ad hoc traffic indication message (ATIM) of the IEEE 802.11 power saving mode (PSM) for power management. Using the ATIM window, nodes negotiate data transmission sessions and exchange data/ACK packets while the other nodes go into sleep mode. H-MMAC defines data transmissions in two modes: normal and extended modes. Normal transmissions occur within the data window and extended transmissions extend to the ATIM window based on the network traffic load. The extended mode can continue to the next data window if other nodes do not use the specific data channel. For control channel reuse, the control channel cycles between two intervals (contention and data intervals). In contention intervals, nodes negotiate with RTS-CTS packets, and in data intervals, nodes that successfully negotiate data transmission slots exchange data and ACK packets.
The spectrally efficient asynchronous multi-channel MAC (SA-MMAC) [
47] enhances the spectrum utilization by reusing the control channel for data transmission, such as AMMAC. If no free data channels are found, the node can transmit one frame in the control channel. Moreover, it follows the bidirectional data transmission mechanism explained in BiMMAC. SA-MMAC uses one common channel and the rest as data channels out of all orthogonal channels. The contention mechanism in the control channel is similar to IEEE 802.11 MAC protocol. The control frames used during contention are RTS-CTS-ATS and solve the issue of multi-channel hidden terminal problems. Once the nodes negotiate which data channel to use, they switch to it and start the data transmission. The receiver can send its frame without contention, backoff, or RTS-CTS handshakes. After data transmission, the nodes return to the control channel where they wait for a mandatory one frame of time to avoid collision with ongoing transmission in the control channel. SA-MMAC reduces the signaling overhead and increases the utilization of the spectrum. Moreover, it solves the deafness and multi-channel hidden terminal problem. Delay incurred by the other nodes in obtaining the channel would be high due to two frames in the data channel. Moreover, nodes need to wait an additional frame of time before they contend due to data transmission in the control channel.
3. Proposed Solution
The proposed solution is divided into two sections: the first section describes the proposed protocol for high network load situations and the second presents a novel dynamic approach to utilize the strengths of the MMAC protocols simulated in this research for various wireless ad hoc network situations.
3.1. E-SA-MMAC and Max-E-SA-MMAC
The proposed solution, an enhanced SA-MMAC (E-SA-MMAC), extends the SA-MMAC protocol. E-SA-MMAC uses one common control channel and the rest as data channels out of all the orthogonal channels. The contention takes place in the control channel and successful nodes switch to negotiated data channels for data transmission.
The control frames exchanged in the control channel are as follows:
RTS: This frame is sent when a node has data to send and it also has additional information about the free channels.
CTS: This frame is sent by the receiver to inform the sender of its reception of the RTS frame and it includes the channel that has been selected for data transmission.
ATS: This frame is used to announce to the neighbors of both the sender and receiver nodes about the data transmission and the negotiated data channel that will be used by these nodes.
The proposed protocol adopts the idea of bidirectional data exchange between nodes in the data channel as well as the control channel to maximize the throughput of the network during peak traffic conditions.
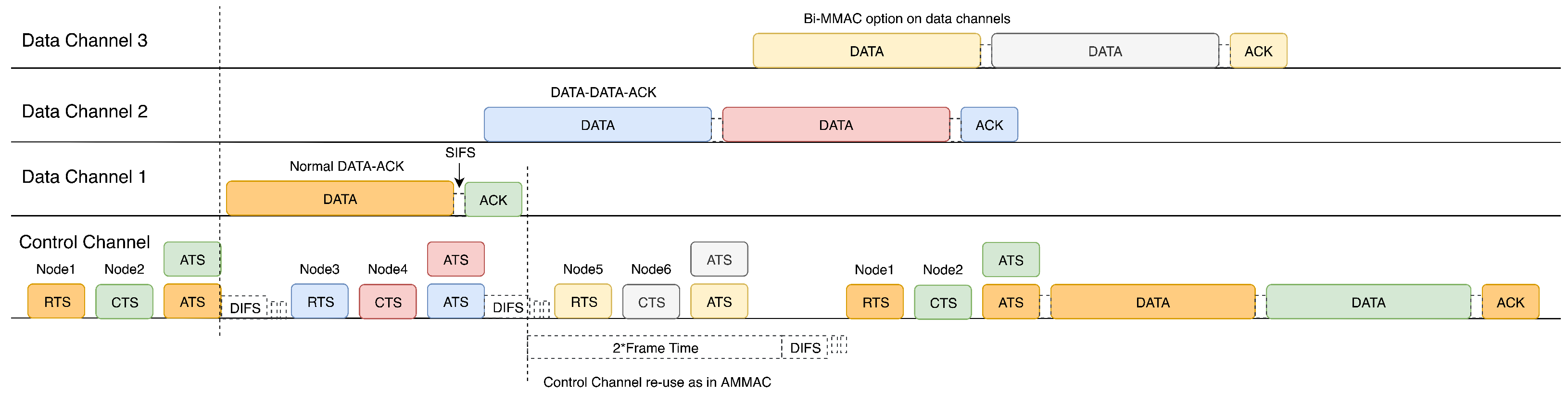
Figure 1 shows the timing diagram for the proposed protocol with four channels (one control and three data channels). The operation of the protocol is as follows:
Nodes contend in the control channel and successful nodes send RTS.
Upon reception of RTS, the receiver replies with a CTS specifying the selected channel to use for data transmission. Moreover, it starts a timer, and upon expiration of this timer, it sends ATS.
Upon reception of CTS, the sender checks the selected channel and sends ATS.
Both nodes switch to the negotiated data channel after sending ATS and they commence data transmission. Two frames can be exchanged bi-directionally if the receiver also has data to send.
If there are no available data channels, the nodes transmit in the control channel. In this protocol, we allow the transmission of two frames in the control channel.
After data transmission, nodes return to the control channel and wait for two mandatory frame times to avoid collision with any ongoing transmission in the control channel.
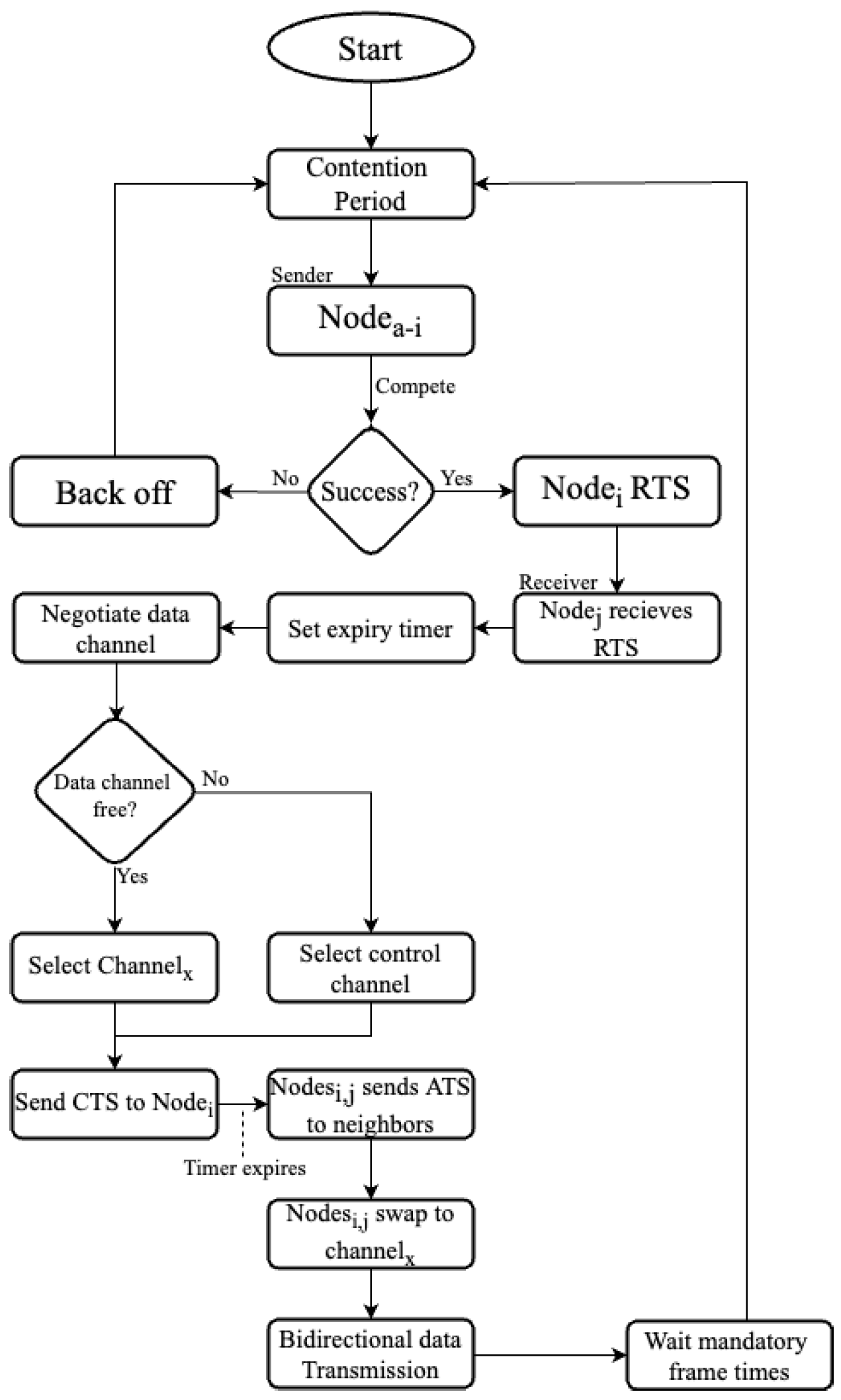
The above protocol operation is described in detail in
Figure 2. After the initial contention period, the node that succeeds sends the RTS to the receiver, which then negotiates a data transmission channel, if not in operation. If all the data channels are busy, then the protocol allows this pair of nodes to transmit data in the control channel, bi-directionally, unique to this protocol.
This protocol utilizes spectrum more efficiently and throughput increases for high contention cases. The deafness and multi-channel hidden terminal problems are solved using the RTS-CTS-ATS exchange and mandatory waiting time. However, the delay incurred for nodes would be higher as more waiting time is needed for nodes to access channels. Additionally, compared to SA-MMAC the fairness would be lower due to two frames being sent in the control channel, increasing the waiting time for queued nodes. In addition to E-SA-MMAC, we propose Max-E-SA-MMAC, which has the same features as the originally proposed protocol but the backoff algorithm has been modified. Initially, the nodes start with [0,
), and upon success, remain uniformly distributed between this range. In case of collision, the contention window is set to
and nodes choose random backoff times based on uniform distribution [0,
). This mechanism ensures fairness between nodes with higher throughput from SA-MMAC.
Table 1 shows the comparison of different protocol features.
3.2. Adaptive MMAC
In this section, the authors present a novel approach to utilize the performance capabilities of the simulated MMAC protocols in different situations. In
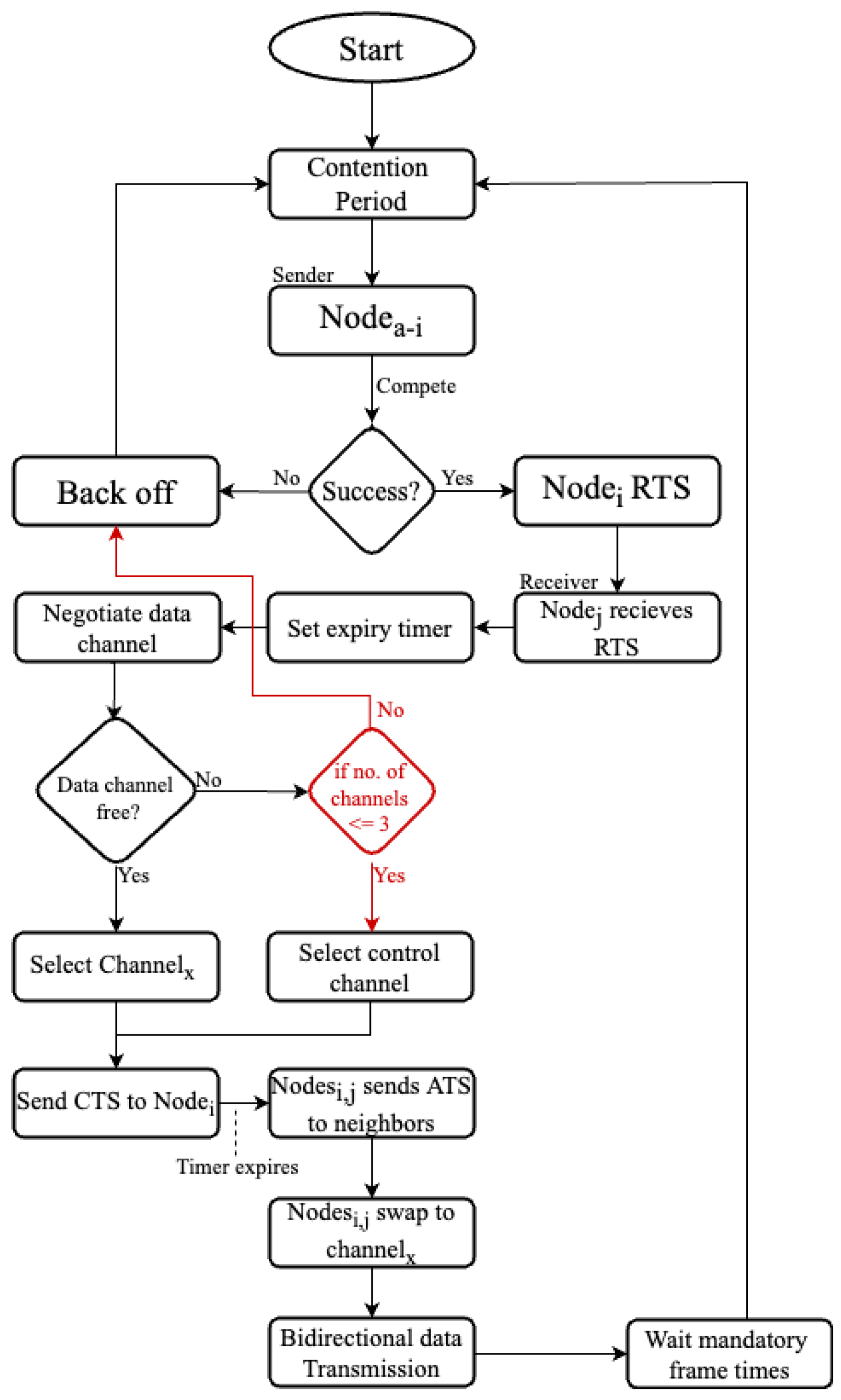
Section 5.2, the analysis shows that E-SA-MMAC and its variant Max-E-SA-MMAC perform the best in terms of throughput and fairness in three or fewer channels due to the utilization of the control channel for data transmission. However, when presented in environments with a greater number of wireless channels, say twelve, the control channel becomes the bottleneck as more data transmission channels are available for negotiation. If the negotiation is interrupted due to the data transmission on the control channel, data transmission dedicated channels are under-utilized as the “handshake” process is delayed. Therefore, the authors propose a dynamic MMAC, which we refer to as adaptive MMAC, which adapts to the number of wireless channels available and uses the control channel for data transmission, only when there are three or fewer channels. Otherwise, it performs the BiMMAC routine of using the control channel for contention mechanisms only.
Figure 3 describes the flow diagram of the Adaptive MMAC protocol. The portion in red is the difference between this protocol and the E-SA-MMAC protocol, enabling the protocol to behave differently based on the resources available.
4. Simulation
4.1. Simulation Environment and Design
The simulation was developed following the conceptual model described by the flow diagrams in
Figure 2 and
Figure 3 in the proposed solution. The initial step was to design a modular code with subsystems interacting with each other to mimic the baseline IEEE 802.11 protocol and to verify the accuracy of the coding method. The simulation environment is done on Python 3 with each protocol compartmentalized in separate python files. A parent python program calls each protocol to execute simultaneously with a given set of configurations, such as the maximum number of stations, increment increase in stations per round, number of wireless channels available, contention window, and other parameters described in the simulation parameters.
Each protocol python file involves running functions that mimic a network of a varying number of stations competing to access a wireless channel to transfer data to another station. This is modeled using array structures consisting of frames up to the maximum number of frames allowed as per the predefined simulation time. Another array is configured with random backoff periods from the 0 to window for each collision that occurs. Collisions are modeled as situations when multiple stations select the same frame time to send the packet, and a collision counter is assigned to each station in another array to store historical contention results. This collision counter imposes a greater backoff penalty for stations to ensure fairness in the algorithm. Nodes fairing badly with subsequent collisions are not able to access a wireless data transmission channel, thus access delay increases and fairness decreases.
After the contention mechanism, the model moves to the success event function with an assigned data transmission channel for two frame time units. This function, depending on the protocol, determines whether the station receiving the transmission is able to send a bidirectional data transmission in the same transmission window post-handshake. This function is the primary difference in the code between the protocols, with the exception of E-SA-MMAC and Max-E-SA-MMAC, as they differ in contention windows during a failure event scenario.
4.2. Simulation Parameters
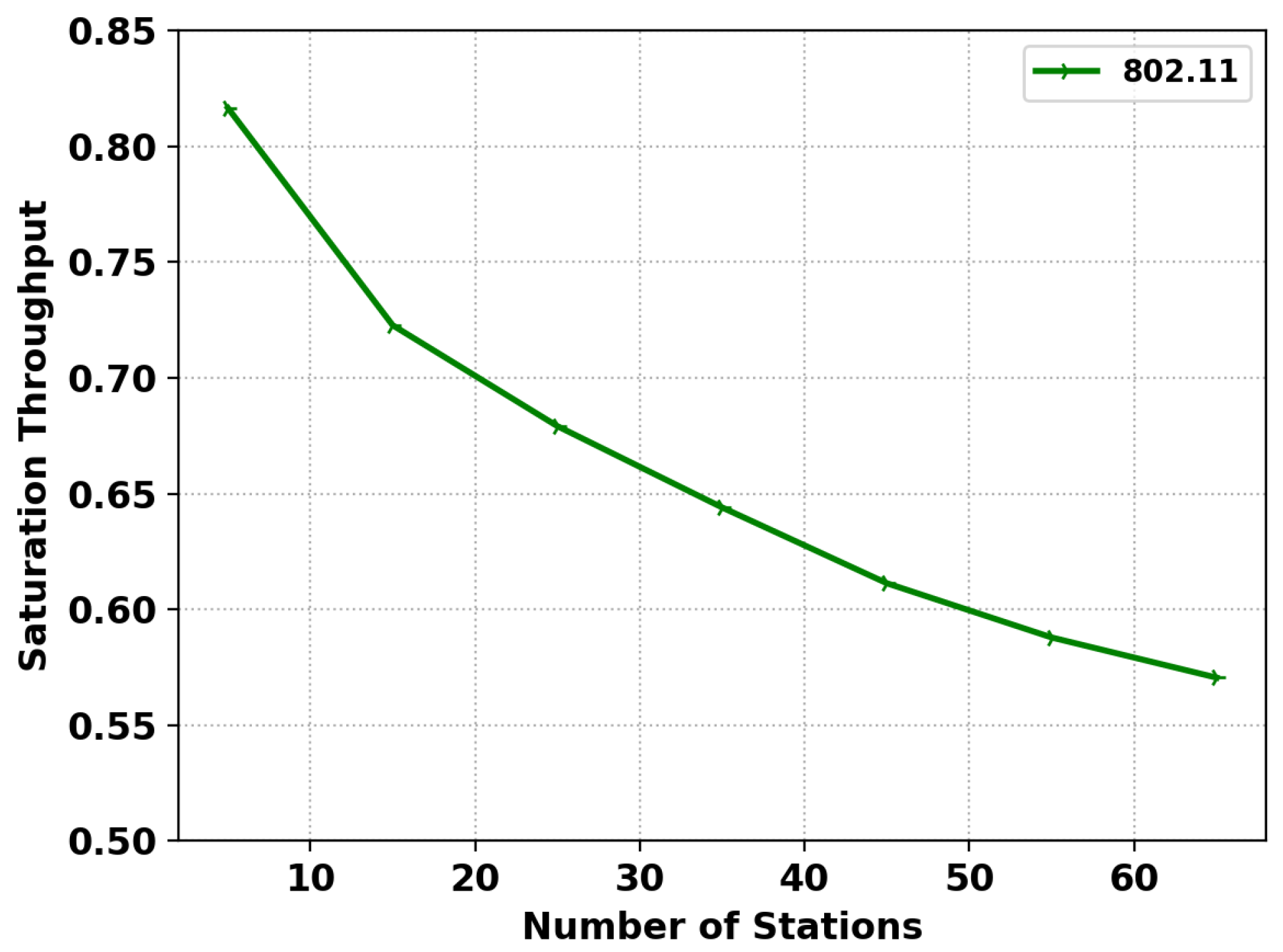
Table 2 describes the parameters for the simulation of this research. For simulator validation, this work considers comparing the saturated throughput trend of IEEE 802.11 MAC protocol in the experiment with the original work presented in [
48]. The payload, headers, and control packet sizes were kept the same as in the previous literature to maintain consistency in measurement. The number of stations ranged from 5 to 70, with increments of 5 stations, until saturation was reached. Further, the simulation was configured with IEEE 802.11b, which allows three concurrent channels without overlap by having three usable channels in the simulation. Similarly, IEEE 802.11n had 4 non-overlapping channels, and an upper-bound case for 12 usable channels was also simulated [
49,
50]. In addition, the results are verified by comparing the normalized throughput of SA-MMAC to confirm the correctness of the Python-based simulation.
4.3. Host Specifications
Table 3 and
Table 4 describe the physical host and software specifications, respectively. The simulation environment was developed on Python 3 and executed on the Ubuntu Linux operating system, hosted in a VMware virtual machine.
The following assumptions are made for the simulation scope of the experimental environment and, subsequently, the performance evaluations of the results:
The nodes are in a single collision domain and are in the transmission range of each other.
The traffic pattern is in a high-load situation, where all nodes have data packets to send and contend for reservation of a channel.
The data rate is considered to be at a fixed rate of 1 Mbps for both data and control packets.
Simulations run for 10,000 data frames.
Figure 4 shows the saturated throughput of the IEEE 802.11 MAC protocol in the simulator, which has a similar trend to the results of (Figure 6) in [
48] and in this simulation.
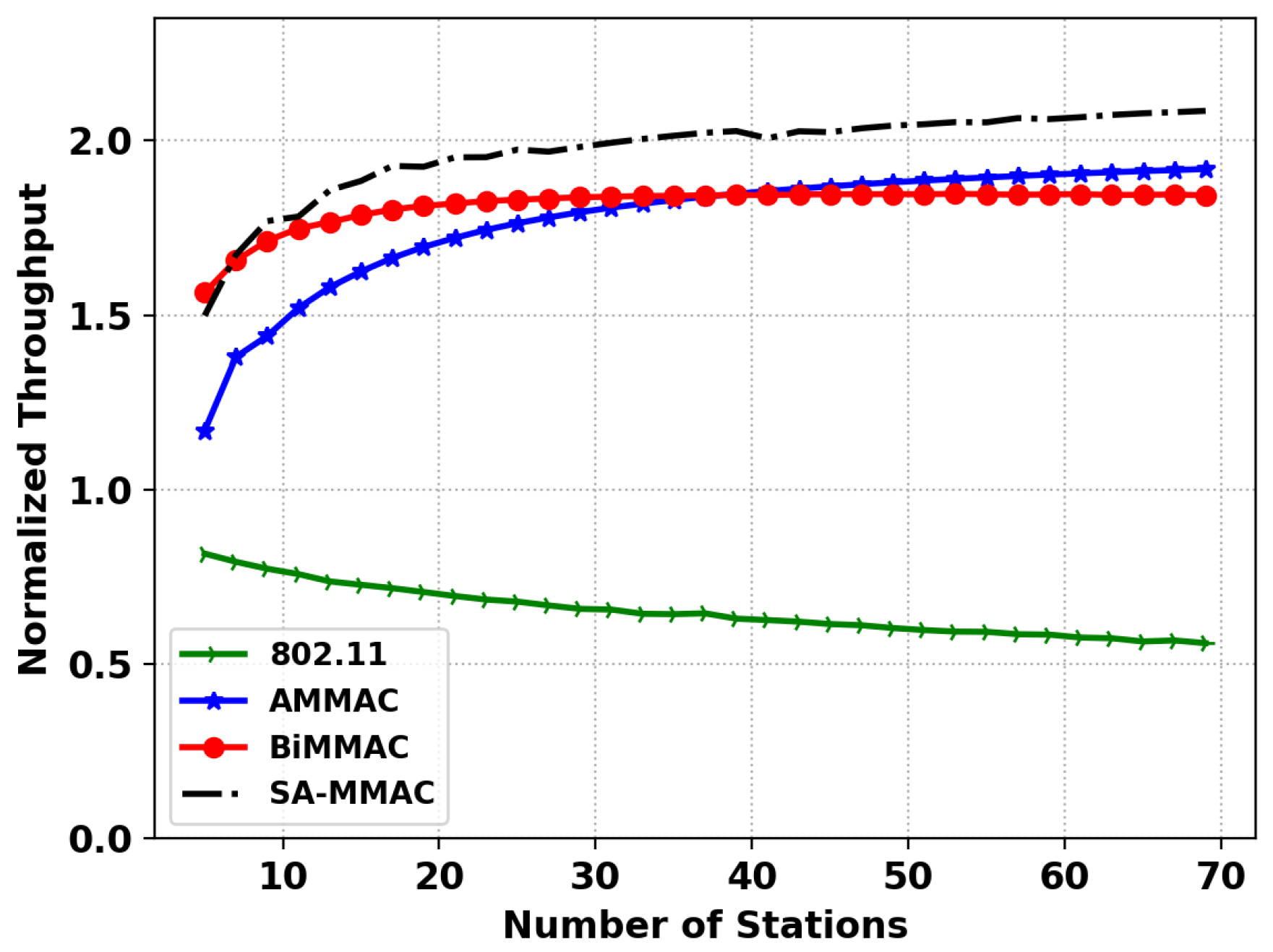
Figure 5 shows the normalized throughput for SA-MMAC, AMMAC, BiMMAC, and IEEE 802.11 in the developed simulator to compare against (Figure 4) in [
47]. As both the figures match the trend in results of the original works, we are confident this simulation produces the correct results with high precision.
5. Results
5.1. Performance Metrics
The following performance metrics are measured in this simulation:
Normalized throughput: This is calculated by dividing the total number of packets received (
) by the number of packets that can be sent in a given simulation time (
), and then multiplying it by the ratio of the packet payload (
) to the frame size (
F). Where
represents the maximum simulation time and
F indicates the frame size. Normalized throughput is calculated using Equation (
1).
Jain’s fairness index (JFI): Average fairness among nodes queued for channel access. This is obtained using Equation (
2), where
n is the number of stations and
t is the time for the current experiment.
Channel access delay: Average queuing delay for a node to access the channel. The channel access delay is computed from Equation (
3), where
N is the number of stations and
is the queuing delay of packets of
th station.
5.2. Analysis
5.2.1. Normalized Throughput
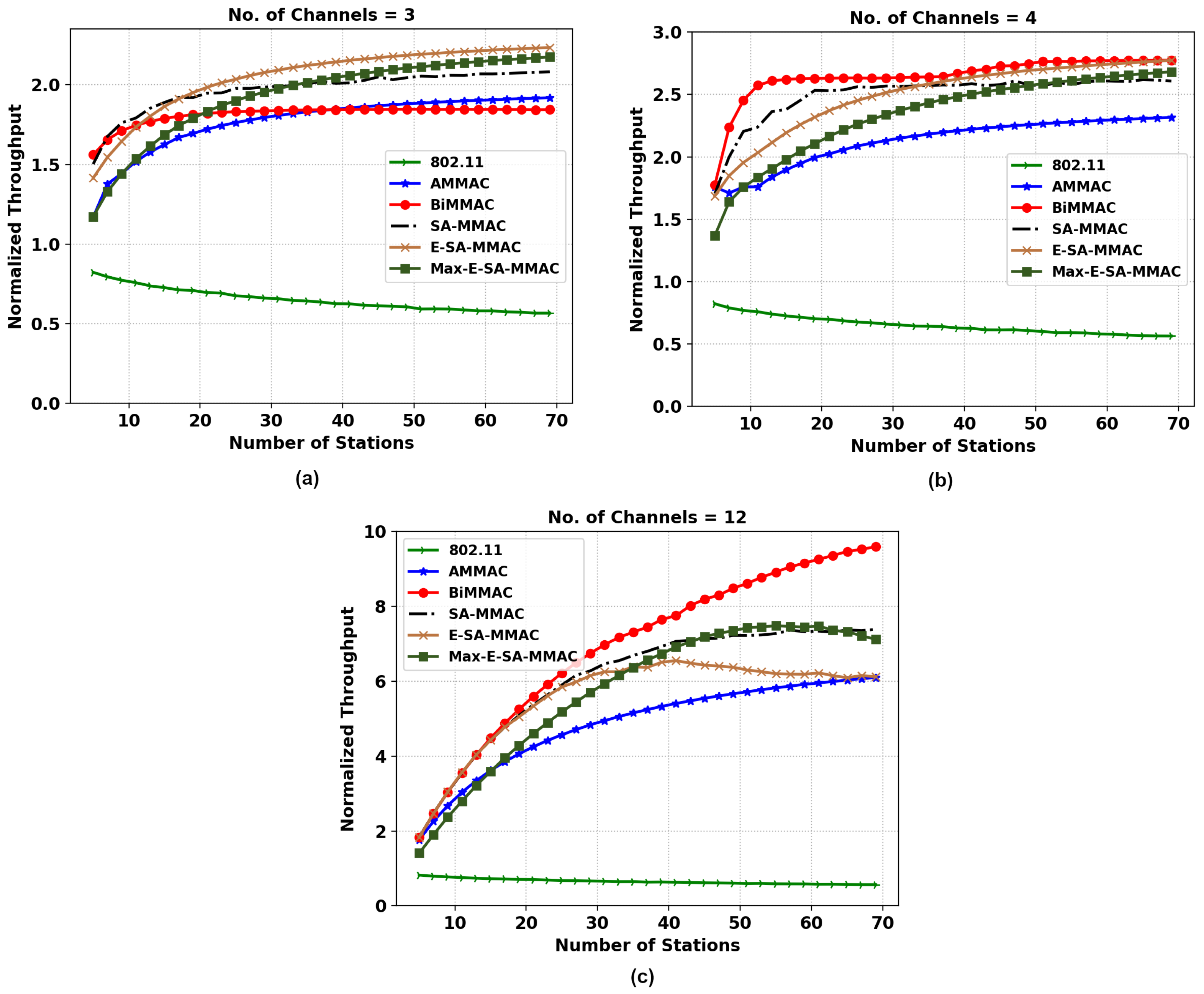
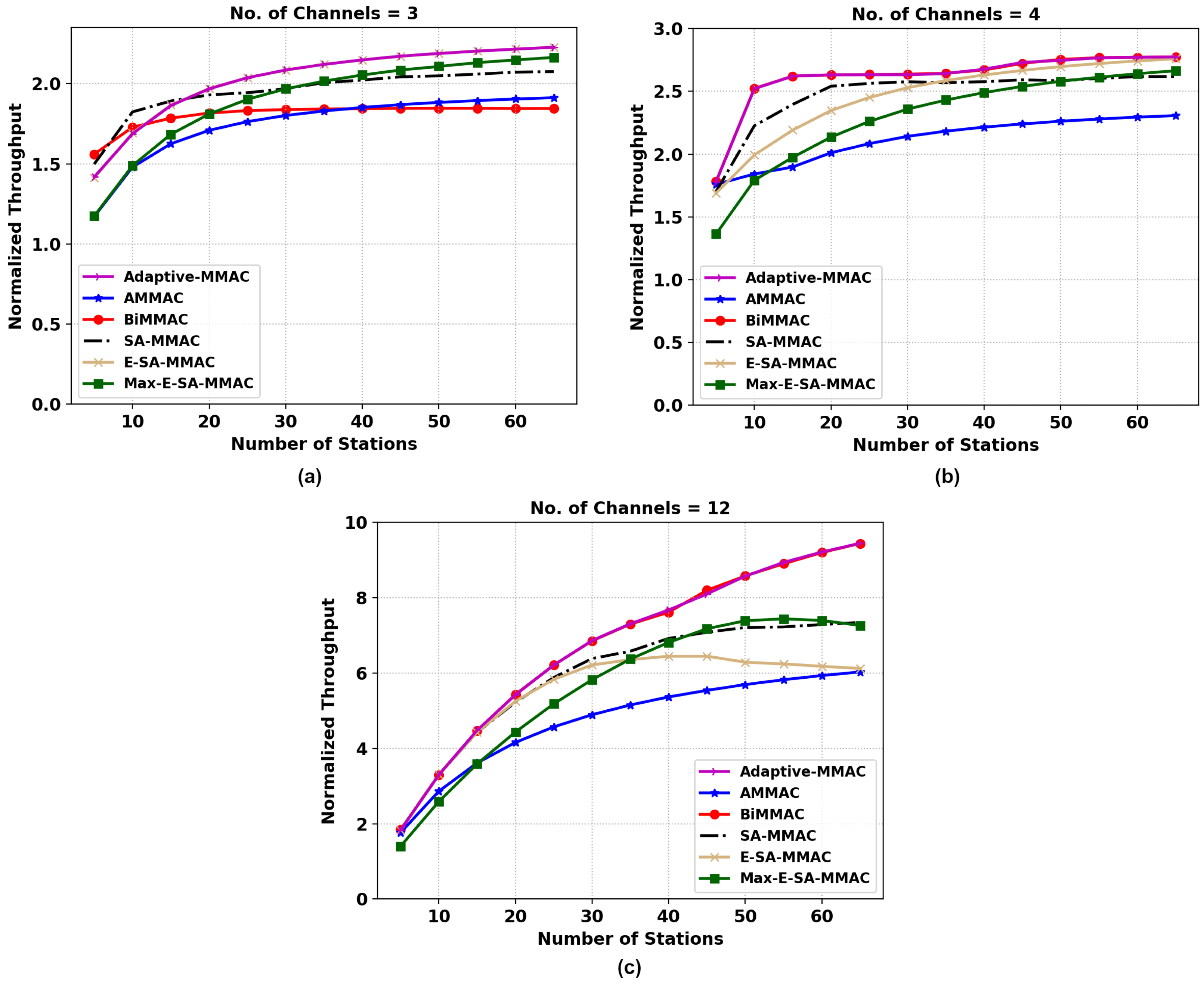
Figure 6 of the throughput analysis shows the performance of the multi-channel MAC (MMAC) protocols including the IEEE 802.11 as a base reference to compare with the single-channel protocol. It is clear that multi-channel MAC protocols (in the case of high-load scenarios) have significantly better throughput results than IEEE 802.11. The concurrency of data packets delivered by multi-channel MAC protocols explains the large margin of difference in performance.
The figures compare the MMAC protocols in configurations of 3, 4, and 12 channels with the number of stations varying by steps of 2 nodes from 5 to 70 nodes. In
Figure 6a, it can be seen that bidirectional MMAC (BiMMAC) outperforms the other protocols initially with a low number of stations in a three-channel network. However, once the number of stations increases, the performance decreases in BiMMAC as it saturates early while other protocols continue to improve the network throughput. This can be explained by the lack of control channel utilization for data transmissions by the BiMMAC protocol.
Both of the proposed protocols, E-SA-MMAC and Max-E-SA-MMAC, outperformed all other protocols in this scenario. This can be explained by the fact that in high-load situations, where every station has a packet to send all of the time, maximizing each RTS-CTS handshake by using the bidirectional packet transfer has a significant impact on the number of successfully transmitted data packets. In the proposed protocols, this includes the use of a control channel to send data packets in both directions when other dedicated data channels are currently unavailable.
In
Figure 6b, the throughput pattern changes significantly. BiMMAC has a better throughput initially; however, with a larger number of stations, the proposed protocol is able to match BiMMAC as it saturates due to the lack of control channel utilization for data transmission. The multi-channel MAC protocols using data transfer on the control channel perform poorly due to the extra overhead and longer backoff timers in the control channel. The fairness index of the former protocol, BiMMAC, falls sharply after approximately 40 stations while E-SA-MMAC and Max-E-SA-MMAC remain more fair and consistent, which will be explained under JFI analysis.
In
Figure 6c, the multi-channel MAC protocols of 12 channels suffer similarly to 4 channels due to the extra overhead and longer backoff timers in the control channel as the station numbers increase. Therefore, protocols not using data transfers in the control channel are able to negotiate more promptly the RTS-CTS demands and keep their data channels occupied. After a certain point, however, it is expected that the number of stations contending in a dedicated control channel will eventually collide more often than successfully negotiating a data channel; thereby, we expect a decrease in the overall network throughput. This is a disadvantage of a dedicated control channel.
5.2.2. Fairness
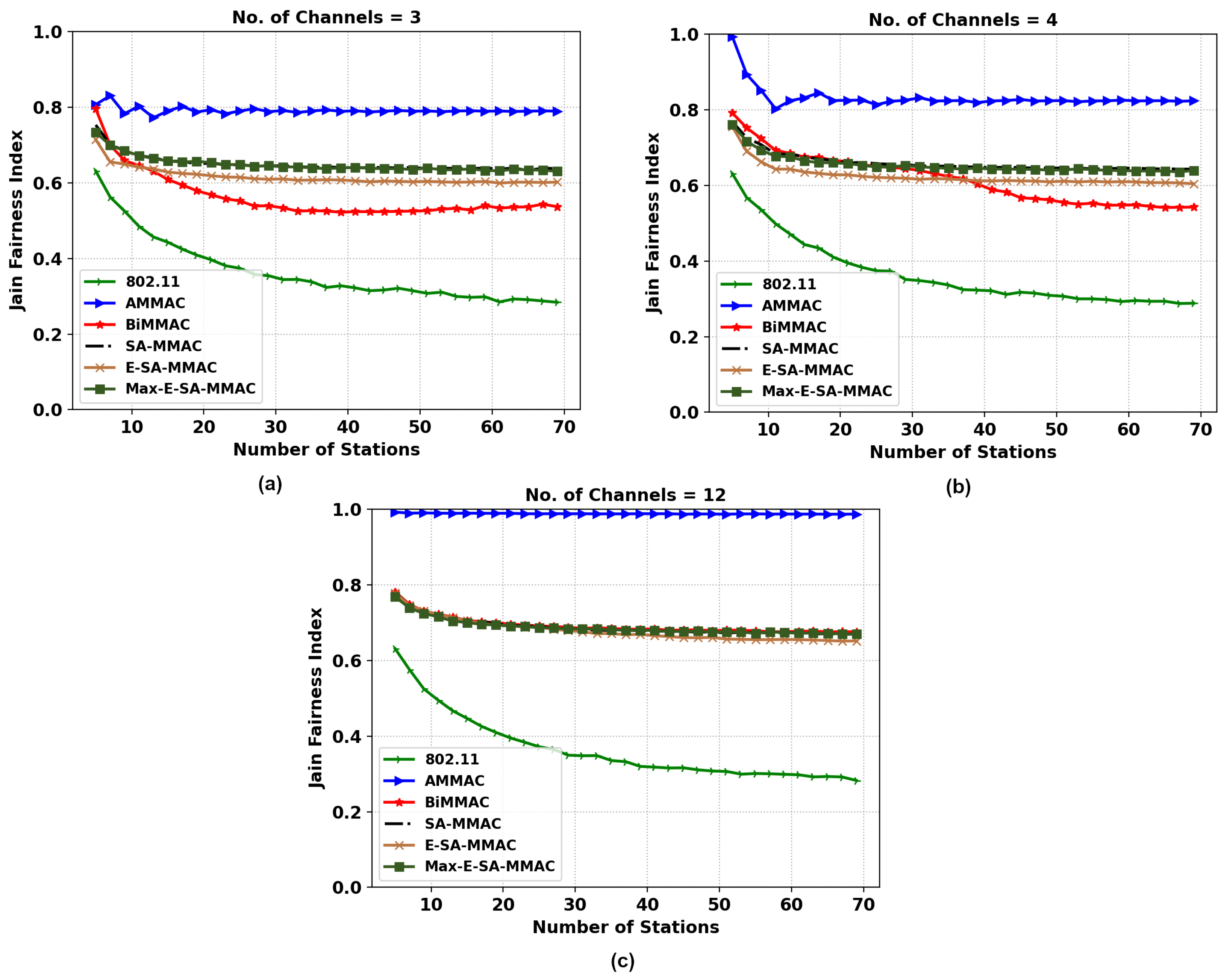
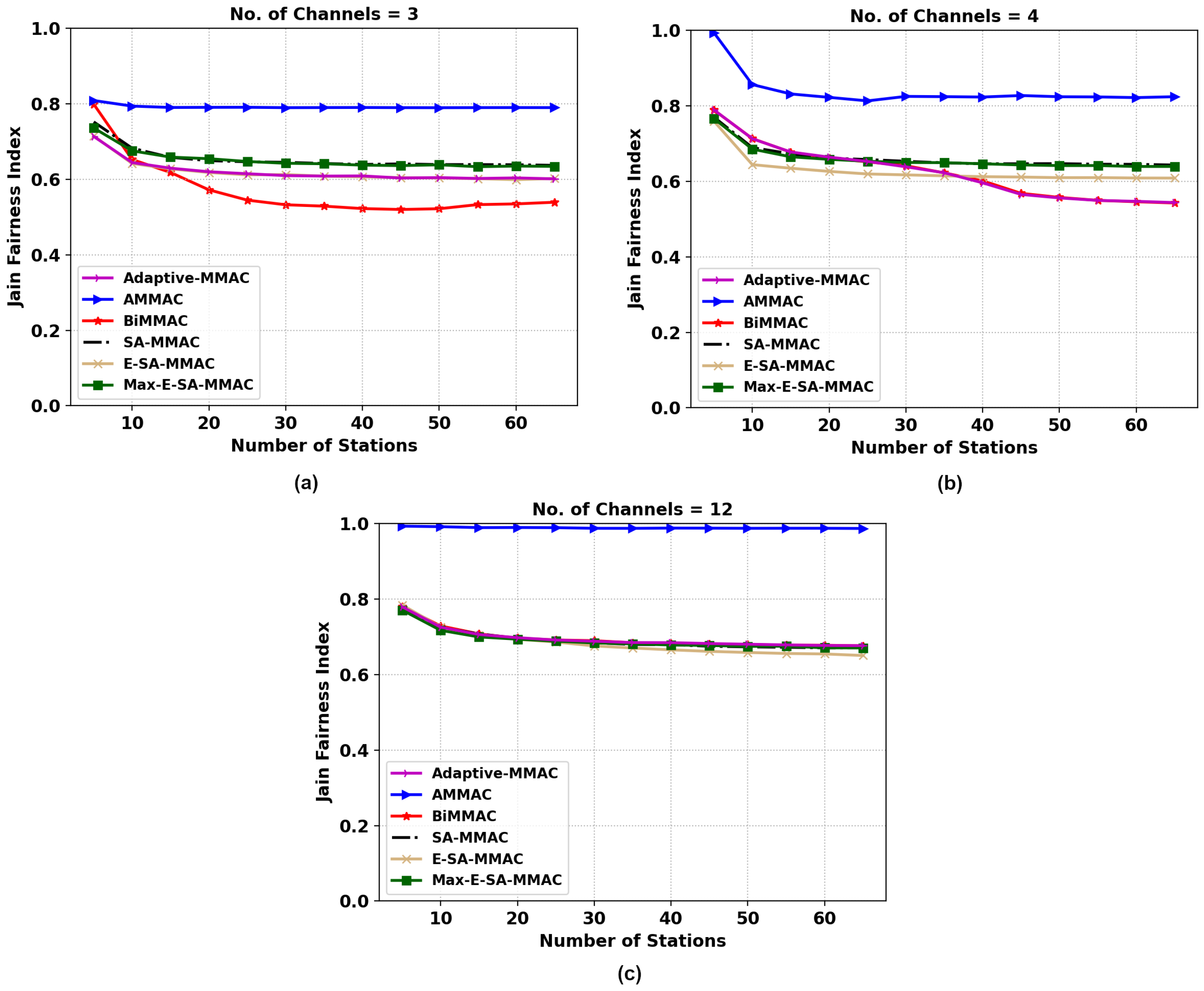
Figure 7a shows the results of Jain’s fairness index (JFI) versus the number of stations for a three-channel configuration. The proposed protocol, whilst providing a higher throughput with the same number of available channels, proves to have a lesser Jain’s fairness index than the original SA-MMAC. Therefore, we proposed an enhancement to the protocol, Max-E-SA-MMAC, which has a higher throughput than SA-MMAC whilst providing a similar JFI performance. Max-E-SA-MMAC assigns
for nodes that have successfully transmitted data frames, allowing for those in the queue to reach the end of their backoff timer faster and gain access to the channel, improving fairness.
In the 4-channel configuration,
Figure 7b, we notice that the BiMMAC loses significant fairness performance after the number of stations passes 35. However, both the proposed protocols and SA-MMAC have a consistent fairness index even as the number of stations increases and remains fairer than the BiMMAC protocol. The queued nodes wait a longer period of time to access the channel in BiMMAC compared to our protocols due to the lack of control channel utilization for data transmission.
In
Figure 7c, all MMAC protocols apart from AMMAC remain consistent and relatively equal. The AMMAC protocol in all three configurations has the highest JFI due to the nature of the protocol only sending one data packet per handshake, allowing for more nodes to send single packets. This however comes at the cost of a poorer throughput performance in a saturated network with a high load of data packets to be sent. For other protocols, except IEEE 802.11, the JFI remains equal due to the availability of a greater number of data channels; therefore, there are fewer stations queued for data transmission.
5.2.3. Channel Access Delay
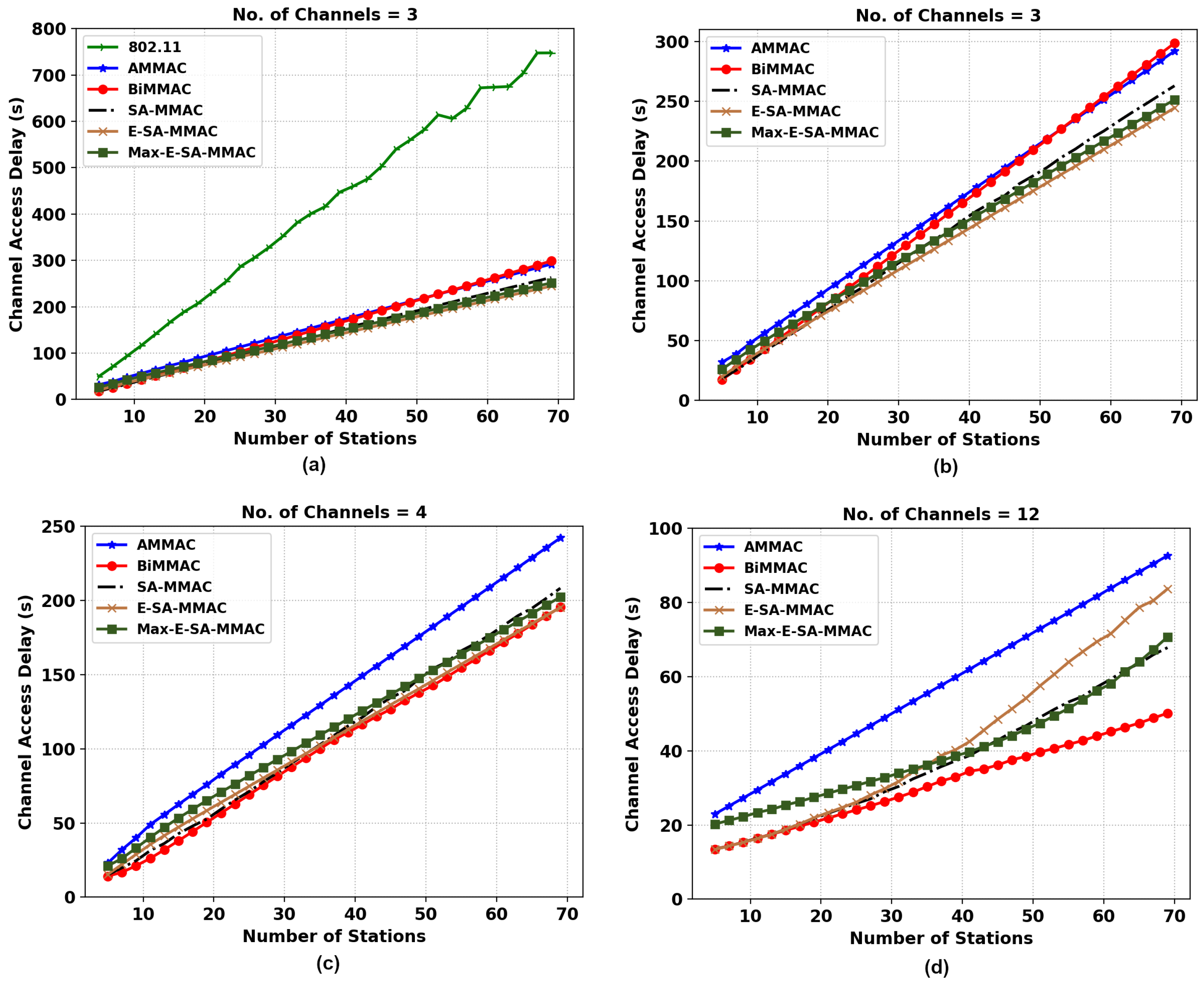
Figure 8a describes the channel access delay between the MAC protocols for a three-channel configuration. It was measured that the channel access delay for IEEE 802.11 was approximately 206% higher than the E-SA-MMAC protocol at 70 stations. This is due to IEEE 802.11 having only a single channel for data transmission, incurring a greater channel access delay for stations that have packets to send. To better represent the differences among the MMAC protocols, we removed IEEE 802.11 from the analysis.
In
Figure 8b, the E-SA-MMAC protocol has the lowest channel access delay, followed by the second protocol, Max-E-SA-MMAC, then SA-MMAC, and the other protocols. This can be attributed to the pure bidirectional mode of operation, even in the control channel, with the protocol. More stations have a chance to piggyback a data packet with the acknowledgment.
In
Figure 8c, AMMAC has the highest delay in channel access, whilst the other protocols are fairly equal in performance. The reason for this, as explained previously, is due to the single data packet transmission per handshake in the AMMAC protocol, while the other protocols allow for bidirectional data transmission per handshake.
Figure 8d shows BiMMAC with the lowest channel access delay as the number of stations increases due to less congestion at the control channel.
5.3. Analysis of Adaptive MMAC
5.3.1. Normalized Throughput
Figure 9 describes the results of the adaptive MMAC protocol that dynamically changes to behave similarly to the E-SA-MMAC and BiMMAC protocols depending on the wireless ad hoc channels availability.
Figure 9a shows the adaptive MMAC protocol switching to the E-SA-MMAC mode when there are only three available data channels. The protocol provides the best throughput figures as it enables the control channel to be used for data transmission when all the other channels are busy.
Figure 9b,c shows the adaptive MMAC switching to the BiMMAC mode and disabling data transmission in the control channel as that would block negotiations for the two mandatory frame time backoff. By opting for the BiMMAC mode, only control packets are transmitted in the control channel, negotiating available data transmission channels.
5.3.2. Fairness
Figure 10 describes the JFI metric of the adaptive MMAC protocol. Similar to the previous analysis of AMMAC, it is the fairest of the protocols evaluated in this study. However, in this instance, the adaptive MMAC of the three channel conditions seen in
Figure 10a is similarly as fair as E-SA-MMAC, as it takes that mode. It can be seen in
Figure 10b,c that when adaptive MMAC takes the BiMMAC route, it is similarly fair to that protocol. Overall, the trend is that the new protocols converge to a similar fairness level of 0.7 JFI as the number of channels and stations increase.
6. Performance Evaluation
For the performance evaluation, we used a full factorial design with k = 3 factors [
52,
53]. The factors we selected were the MMAC protocols, number of stations, and number of channels. Each factor contains different levels to consider.
Table 5 shows the factors and the levels considered for the MMAC performance study.
= response (observation) in the Ith replication of the experiment with factors A = MMAC protocols, B = No. of channels, and C = No. of stations at levels i = 5, j = 3, and k = 4, respectively.
= mean response
= effect of factor A at level i
= effect of factor B at level j
= effect of factor C at level k
= interaction between A and B at levels i and j.
= interaction between A, B, C at levels i, j, k.
From the analysis of variation (ANOVA),
Table 6, of the throughput analysis, we notice the main effect on the throughput variation is mostly due to the number of channels with almost 56% variation and, to a lesser extent, the number of stations with an impact of around 20.6% of the results, with the MMAC protocols having the least impact with a variation of 1.6%. These variations were calculated from the respective ANOVA tables by dividing the sum of squares of each factor by the total.
Additionally, the interaction between the number of channels and the number of stations has the most significant effect with a 17.7% variation in the throughput compared to any other interaction combination. This implies that the number of channels and the number of stations match each other in terms of the effect they have on the throughput. The interaction between all three factors accounts for only 1.4% of the variation.
Table 7 describes the ANOVA for JFI, which highlights the impact of the MMAC protocols on the variation of the fairness index. The MMAC protocols contribute 58.7% to the variation in the results. The number of stations has the next most impactful effect with 20.3%, but the number of channels has a negligible effect on fairness.
Moreover, the table shows that the interaction between MMAC protocols and the number of channels has the largest effect with a 4.7% variation in the fairness from the interacting factors. Interactions between all factors account for 2.4% of the variation.
Table 8 describes the ANOVA for channel access delay, which shows that the impact of the number of stations in the collision domain of the network has the most significant effect on the variation of channel access delay with 55.8%. The second most impactful effect is the number of channels with 28.5%, while the MMAC protocols explain the least percentages of variation.
Furthermore, the interaction between the number of stations and channels explains the greatest percentage of variation among the interactions of the factors with almost 13%. This implies that the number of stations and channels match each other in terms of the effect they have on the channel access delay. The interaction between all three factors accounts for only 0.4% of the variation and, therefore, is negligible.
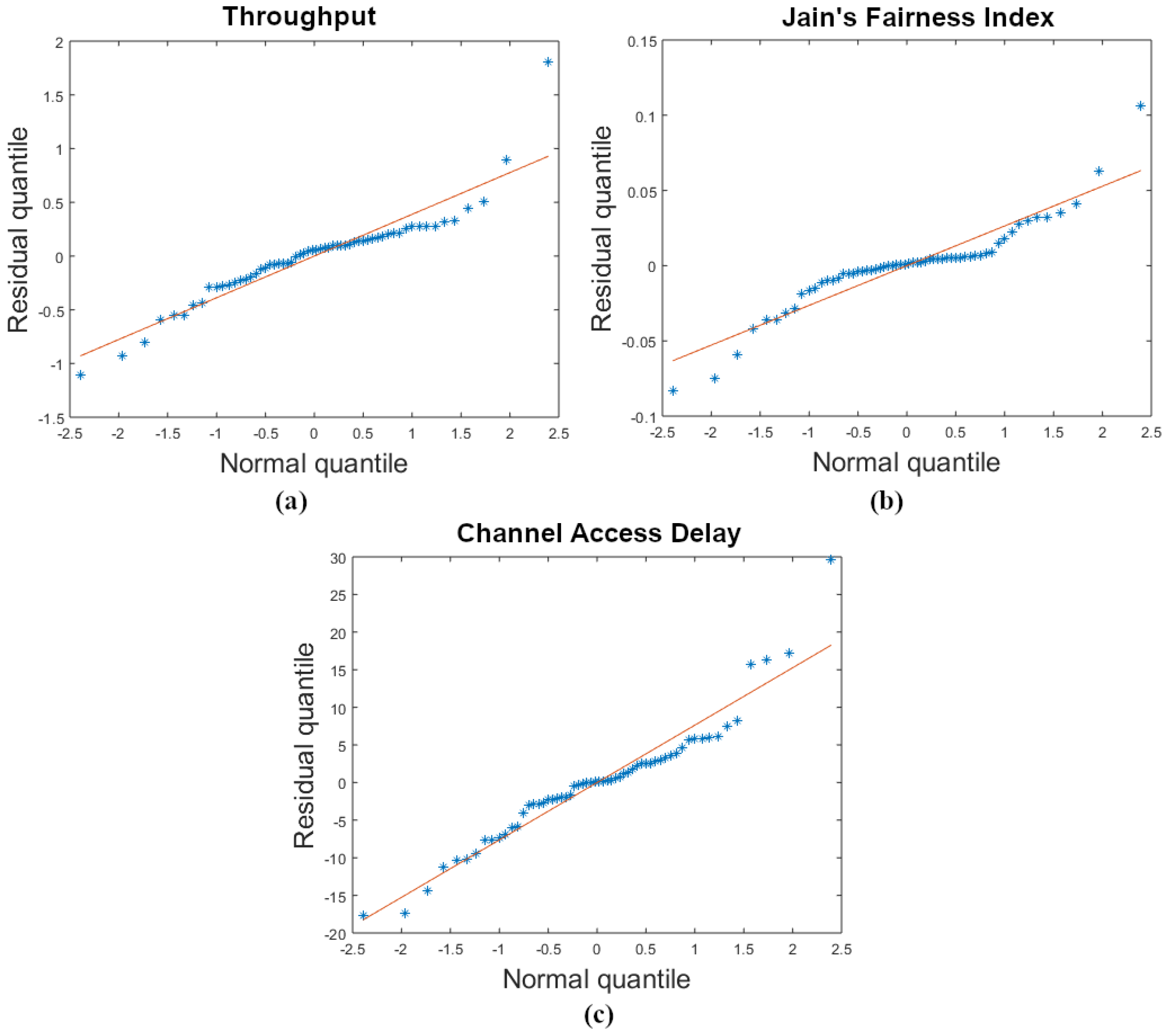
The assumption that the residuals are normally distributed is proven by the quantile–quantile plots for all three factors in
Figure 11a–c. The visual tests show that the residuals fall evenly around the least squares line.
7. Conclusions
In conclusion, the proposed E-SA-MMAC and Max-E-SA-MMAC protocols achieve greater throughput than the other MMAC protocols at the expense of fairness while the number of channels is low. Max-E-SA-MMAC adapts to the mode, which provides greater throughput and equal fairness to the previous works. A large number of channels shows a negative effect on the throughput of the protocol due to the congestion at the control channel. Thus, we extended the protocol to adapt to the changing wireless ad hoc network conditions based on the number of channels by using the control channel for data transmission at a low availability of channels and the BiMMAC approach in other situations. The results of this adaptive MMAC demonstrate that this approach achieves the best of both worlds in dynamically changing environments.
Further, we learned from the analysis of variation that protocols have a much smaller effect on the variation of throughput compared to the number of stations and the total number of channels. The number of channels has the greatest effect on the variation of throughput by a large margin. The ANOVA table for throughput also highlights the effect of the interaction between the number of channels and the number of stations on the variation of throughput. Lastly, MMAC protocols explain the majority of the variation in fairness, while the number of stations contributes to the majority of the channel access delay.
Future Work
For future work, the contention window should be adaptable, depending on the network sizes, and considering the mobility of nodes. Moreover, an optimization approach can be used to optimize the value of used in Max-E-SA-MMAC. Security of the protocol can be tackled by the use of the lightweight cryptographic algorithms at the MAC layer. Furthermore, the simulation environment and subsequent parameters should be adjusted to the modern 1 Gbps bit rate of the channel so further tests could be performed to confirm whether the results stay consistent for this simulation scenario. In addition, this study can be extended to consider the size of the collision domain to measure the fairness among nodes in the network.
Author Contributions
Conceptualization, A.B., S.M.M., A.A., T.R.S. and A.M.; methodology, A.B., S.M.M., A.A., T.R.S. and A.M.; software, A.B., S.M.M. and A.A.; writing—original draft, A.B., S.M.M. and A.A.; writing—review and editing, A.B., S.M.M., A.A., T.R.S. and A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors would like to thank the Department of Computer Engineering and the Interdisciplinary Research Center of Smart Mobility and Logistics, King Fahd University of Petroleum and Minerals, for their support of this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abdulghaffar, A.; Mahmoud, A.; Abu-Amara, M.; Sheltami, T. Modeling and evaluation of software defined networking based 5G core network architecture. IEEE Access 2021, 9, 10179–10198. [Google Scholar] [CrossRef]
- Abdul Ghaffar, A.A.; Mahmoud, A.; Sheltami, T.; Abu-Amara, M. A Survey on Software-Defined Networking-Based 5G Mobile Core Architectures. Arab. J. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- AbdulGhaffar, A.; Mostafa, S.M.; Alsaleh, A.; Sheltami, T.; Shakshuki, E.M. Internet of things based multiple disease monitoring and health improvement system. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 1021–1029. [Google Scholar] [CrossRef]
- Abdeen, M.A.; Beg, A.; Mostafa, S.M.; AbdulGhaffar, A.; Sheltami, T.R.; Yasar, A. Performance Evaluation of VANET Routing Protocols in Madinah City. Electronics 2022, 11, 777. [Google Scholar] [CrossRef]
- Beg, A.; Qureshi, A.R.; Sheltami, T.; Yasar, A. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city. Pers. Ubiquitous Comput. 2021, 25, 33–50. [Google Scholar] [CrossRef]
- Crow, B.P.; Widjaja, I.; Kim, J.G.; Sakai, P.T. IEEE 802.11 wireless local area networks. IEEE Commun. Mag. 1997, 35, 116–126. [Google Scholar] [CrossRef]
- Forouzan, A.B. Data Communications & Networking (sie); Tata McGraw-Hill Education: New York, NY, USA, 2007. [Google Scholar]
- 802.11 a-1999—IEEE Standard for Telecommunications and Information Exchange Between Systems—LAN/MAN Specific Requirements—Part 11: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications: High Speed Physical Layer in the 5 GHz Band. Technical Report. 1999. Available online: https://ieeexplore.ieee.org/document/815305 (accessed on 15 September 2022).
- Fischer, M.A. Medium Access Control Protocol for Wireless Network. U.S. Patent 5,371,734, 27 January 1994. [Google Scholar]
- Alahmadi, H.; Boabdullah, F. A Review of Multi-Channel Medium Access Control Protocols for Wireless Sensor Networks. Eur. J. Eng. Technol. Res. 2021, 6, 39–53. [Google Scholar] [CrossRef]
- Bockelmann, C.; Pratas, N.; Nikopour, H.; Au, K.; Svensson, T.; Stefanovic, C.; Popovski, P.; Dekorsy, A. Massive machine-type communications in 5G: Physical and MAC-layer solutions. IEEE Commun. Mag. 2016, 54, 59–65. [Google Scholar] [CrossRef] [Green Version]
- Feng, M.; Mao, S. Harvest the potential of massive MIMO with multi-layer techniques. IEEE Netw. 2016, 30, 40–45. [Google Scholar] [CrossRef]
- Kliazovich, D.; Granelli, F.; Gerla, M. Performance improvement in wireless networks using cross-layer ARQ. Comput. Netw. 2007, 51, 4396–4411. [Google Scholar] [CrossRef]
- Raisinghani, V.T.; Iyer, S. Cross-layer design optimizations in wireless protocol stacks. Comput. Commun. 2004, 27, 720–724. [Google Scholar] [CrossRef]
- Mo, J.; So, H.S.W.; Walrand, J. Comparison of multichannel MAC protocols. IEEE Trans. Mob. Comput. 2007, 7, 50–65. [Google Scholar]
- Taneja, K.; Taneja, H.; Kumar, R. Multi-channel medium access control protocols: Review and comparison. J. Inf. Optim. Sci. 2018, 39, 239–247. [Google Scholar] [CrossRef]
- So, W.; Walrand, J.; Mo, J. McMAC: A parallel rendezvous multi-channel MAC protocol. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Washington, DC, USA, 1–15 May 2007; pp. 334–339. [Google Scholar]
- So, J.; Vaidya, N.H. Multi-channel mac for ad hoc networks: Handling multi-channel hidden terminals using a single transceiver. In Proceedings of the 5th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Tokyo, Japan, 24–26 May 2004; pp. 222–233. [Google Scholar]
- Wu, S.L.; Lin, C.Y.; Tseng, Y.C.; Sheu, J.L. A new multi-channel MAC protocol with on-demand channel assignment for multi-hop mobile ad hoc networks. In Proceedings of the International Symposium on Parallel Architectures, Algorithms and Networks, I-SPAN 2000, Dallas, TX, USA, 7–9 December 2000; pp. 232–237. [Google Scholar]
- Shi, J.; Salonidis, T.; Knightly, E.W. Starvation mitigation through multi-channel coordination in CSMA multi-hop wireless networks. In Proceedings of the 7th ACM International Symposium on Mobile Ad Hoc Networking and Computing, New York, NY, USA, 22–25 May 2006; pp. 214–225. [Google Scholar]
- Maheshwari, R.; Gupta, H.; Das, S.R. Multichannel MAC protocols for wireless networks. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 25–28 September 2006; Volume 2, pp. 393–401. [Google Scholar]
- Muttair, K.S.; Zahid, A.Z.G.; Al-Ani, O.A.S.; AL-Asadi, A.M.Q.; Mosleh, M.F. Antennas performance comparison of multi-bands for optimal outdoor and indoor environments wireless coverage. Indones. J. Electr. Eng. Inform. 2021, 9, 846–858. [Google Scholar] [CrossRef]
- Huang, Z.; Shen, C.C. A comparison study of omnidirectional and directional MAC protocols for ad hoc networks. In Proceedings of the Global Telecommunications Conference, GLOBECOM’02, Taipei, Taiwan, 7–21 November 2002; Volume 1, pp. 57–61. [Google Scholar]
- Carr, J.J. Directional or Omnidirectional Antenna; Joe Carr’s Receiving Antenna Handbook Hightext Publications: Solanna Beach, CA, USA, 1993. [Google Scholar]
- Incel, O.D. A survey on multi-channel communication in wireless sensor networks. Comput. Netw. 2011, 55, 3081–3099. [Google Scholar] [CrossRef]
- EkbataniFard, G.; Monsefi, R. A detailed review of multi-channel medium access control protocols for wireless sensor networks. Int. J. Wirel. Inf. Netw. 2012, 19, 1–21. [Google Scholar] [CrossRef]
- Algora, C.M.G.; Reguera, V.A.; Deligiannis, N.; Steenhaut, K. Review and classification of multichannel MAC protocols for low-power and lossy networks. IEEE Access 2017, 5, 19536–19561. [Google Scholar] [CrossRef]
- Yahya, B.; Ben-Othman, J. Towards a classification of energy aware MAC protocols for wireless sensor networks. Wirel. Commun. Mob. Comput. 2009, 9, 1572–1607. [Google Scholar] [CrossRef]
- Tang, L.; Sun, Y.; Gurewitz, O.; Johnson, D.B. EM-MAC: A dynamic multichannel energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the Twelfth ACM International Symposium on Mobile Ad Hoc Networking and Computing, New York, NY, USA, 17–19 May 2011; pp. 1–11. [Google Scholar]
- Dang, D.N.M.; Nguyen, V.; Le, H.T.; Hong, C.S.; Choe, J. An efficient multi-channel MAC protocol for wireless ad hoc networks. Ad Hoc Netw. 2016, 44, 46–57. [Google Scholar] [CrossRef]
- Swain, R.R.; Mishra, S.; Samal, T.K.; Kabat, M.R. An energy efficient advertisement based multichannel distributed MAC protocol for wireless sensor networks (Adv-MMAC). Wirel. Pers. Commun. 2017, 95, 655–682. [Google Scholar] [CrossRef]
- Hsu, S.H.; Hsu, C.C.; Lin, F.C. A reliable multi-channel MAC protocol with efficient multicast support for ad hoc networks. In Proceedings of the 4th International Workshop on Mobile and Wireless Communications Network, Stockholm, Sweden, 17–21 November 2002; pp. 616–620. [Google Scholar]
- Yang, B.; Li, B.; Yan, Z.; Yang, M.; Zuo, X. A reliable channel reservation based multi-channel MAC protocol with a single transceiver. In Proceedings of the 2015 11th International Conference on Heterogeneous Networking for Quality, Reliability, Security and Robustness (QSHINE), Taipei, Taiwan, 19–20 August 2015; pp. 265–271. [Google Scholar]
- Ma, Z.; Xiao, M.; Xiao, Y.; Pang, Z.; Poor, H.V.; Vucetic, B. High-reliability and low-latency wireless communication for internet of things: Challenges, fundamentals, and enabling technologies. IEEE Internet Things J. 2019, 6, 7946–7970. [Google Scholar] [CrossRef]
- Ho, T.S.; Chen, K.C. Performance analysis of IEEE 802.11 CSMA/CA medium access control protocol. In Proceedings of the PIMRC’96—7th International Symposium on Personal, Indoor, and Mobile Communications, Taipei, Taiwan, 18 October 1996; Volume 2, pp. 407–411. [Google Scholar]
- Bianchi, G.; Fratta, L.; Oliveri, M. Performance evaluation and enhancement of the CSMA/CA MAC protocol for 802.11 wireless LANs. In Proceedings of the PIMRC’96—7th International Symposium on Personal, Indoor, and Mobile Communications, Taipei, Taiwan, 18 October 1996; Volume 2, pp. 392–396. [Google Scholar]
- Bianchi, G. Performance analysis of the IEEE 802.11 distributed coordination function. IEEE J. Sel. Areas Commun. 2000, 18, 535–547. [Google Scholar] [CrossRef]
- Deng, J.; Chang, R.S. A priority scheme for IEEE 802. 11 DCF access method. IEICE Trans. Commun. 1999, 82, 96–102. [Google Scholar]
- Wang, X.; Kar, K. Throughput modelling and fairness issues in CSMA/CA based ad-hoc networks. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 May 2005; Volume 1, pp. 23–34. [Google Scholar]
- Cagalj, M.; Ganeriwal, S.; Aad, I.; Hubaux, J.P. On selfish behavior in CSMA/CA networks. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 May 2005; Volume 4, pp. 2513–2524. [Google Scholar]
- Almotairi, K.H.; Shen, X. A distributed multi-channel MAC protocol for ad hoc wireless networks. IEEE Trans. Mob. Comput. 2014, 14, 1–13. [Google Scholar] [CrossRef]
- Kuang, T.; Williamson, C. A bidirectional multi-channel MAC protocol for improving TCP performance on multihop wireless ad hoc networks. In Proceedings of the 7th ACM International Symposium on Modeling, Analysis and Simulation of Wireless and Mobile Systems, New York, NY, USA, 22–26 November 2004; pp. 301–310. [Google Scholar]
- Gupta, V.; Gong, M.; Dharmaraja, S.; Williamson, C. Analytical modeling of bidirectional multi-channel IEEE 802.11 MAC protocols. Int. J. Commun. Syst. 2011, 24, 647–665. [Google Scholar] [CrossRef]
- Merlin, S.; Abraham, S.P.; Frederiks, G.R.; Jones, V.K.; Wentink, M.M. Request to Send (RTS) and Clear to Send (CTS) for Multichannel Operations. U.S. Patent 9,119,110, 13 September 2016. [Google Scholar]
- Nguyen, D.; Garcia-Luna-Aceves, J.; Obraczka, K. Collision-free asynchronous multi-channel access in ad hoc networks. In Proceedings of the GLOBECOM 2009—2009 IEEE Global Telecommunications Conference, Honolulu, HI, USA, 10 November–4 December 2009; pp. 1–6. [Google Scholar]
- Dang, D.N.M.; Hong, C.S.; Lee, S. A hybrid multi-channel MAC protocol for wireless ad hoc networks. Wirel. Netw. 2015, 21, 387–404. [Google Scholar] [CrossRef]
- Devendiran, A.; Sheltami, T.; Mahmoud, A. A Novel Spectrally Efficient Asynchronous Multi-Channel MAC Using a Half-Duplex Transceiver for Wireless Networks. J. Sens. Actuator Netw. 2018, 7, 6. [Google Scholar] [CrossRef]
- Wu, H.; Peng, Y.; Long, K.; Cheng, S.; Ma, J. Performance of reliable transport protocol over IEEE 802.11 wireless LAN: Analysis and enhancement. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies, New York, NY, USA, 23–27 June 2002; Volume 2, pp. 599–607. [Google Scholar]
- Khanduri, R.; Rattan, S. Performance Comparison Analysis between IEEE 802.11 a/b/g/n Standards. Int. J. Comput. Appl. 2013, 78, 13–20. [Google Scholar]
- Nachtigall, J.; Zubow, A.; Redlich, J.P. The impact of adjacent channel interference in multi-radio systems using IEEE 802.11. In Proceedings of the 2008 International Wireless Communications and Mobile Computing Conference, Crete, Greece, 12–14 October 2008; pp. 874–881. [Google Scholar]
- Canonical; Ubuntu 14.04.6 LTS. Available online: https://releases.ubuntu.com/14.04/ (accessed on 15 September 2022).
- Jain, R. The Art of Computer Systems Performance Analysis: Techniques for Experimental Design, Measurement, Simulation, and Modeling; John Wiley & Sons: Hoboken, NJ, USA, 1990. [Google Scholar]
- Girden, E.R. ANOVA: Repeated Measures; Number 84; Sage: Thousand Oaks, CA, USA, 1992. [Google Scholar]
Figure 1.
Timing diagram for proposed MMAC protocol.
Figure 1.
Timing diagram for proposed MMAC protocol.
Figure 2.
Flow diagram of the proposed E-SA-MMAC protocol.
Figure 2.
Flow diagram of the proposed E-SA-MMAC protocol.
Figure 3.
Flow diagram of the proposed adaptive MMAC protocol.
Figure 3.
Flow diagram of the proposed adaptive MMAC protocol.
Figure 4.
Simulation of IEEE 802.11.
Figure 4.
Simulation of IEEE 802.11.
Figure 5.
Simulation of IEEE 802.11, AMMAC, BiMMAC, and SA-MMAC.
Figure 5.
Simulation of IEEE 802.11, AMMAC, BiMMAC, and SA-MMAC.
Figure 6.
Normalized throughput comparison of the two MMAC protocols, E-SA-MMAC and Max-E-SA-MMAC, versus others; (a) 3, (b) 4, and (c) 12 channels.
Figure 6.
Normalized throughput comparison of the two MMAC protocols, E-SA-MMAC and Max-E-SA-MMAC, versus others; (a) 3, (b) 4, and (c) 12 channels.
Figure 7.
JFI comparison of the two MMAC protocols, E-SA-MMAC, and Max-E-SA-MMAC, versus others; (a) 3, (b) 4, and (c) 12 channels.
Figure 7.
JFI comparison of the two MMAC protocols, E-SA-MMAC, and Max-E-SA-MMAC, versus others; (a) 3, (b) 4, and (c) 12 channels.
Figure 8.
Channel access delay comparison of the two MMAC protocols, E-SA-MMAC, and Max-E-SA-MMAC, versus others. (a) Three channels with IEEE 802.11, (b) three channels, (c) four channels, and (d) twelve channels.
Figure 8.
Channel access delay comparison of the two MMAC protocols, E-SA-MMAC, and Max-E-SA-MMAC, versus others. (a) Three channels with IEEE 802.11, (b) three channels, (c) four channels, and (d) twelve channels.
Figure 9.
Normalized throughput comparison of adaptive MMAC versus others. (a) Three, (b) four, and (c) twelve channels.
Figure 9.
Normalized throughput comparison of adaptive MMAC versus others. (a) Three, (b) four, and (c) twelve channels.
Figure 10.
JFI comparison of adaptive MMAC versus others. (a) Three, (b) four, and (c) twelve channels.
Figure 10.
JFI comparison of adaptive MMAC versus others. (a) Three, (b) four, and (c) twelve channels.
Figure 11.
Quantile–quantile plot of (a) throughput, (b) JFI, and (c) channel access delay.
Figure 11.
Quantile–quantile plot of (a) throughput, (b) JFI, and (c) channel access delay.
Table 1.
Comparison of features.
Table 1.
Comparison of features.
| Feature | IEEE 802.11 | BiMMAC | AMMAC | SA-MMAC | E-SA-MMAC |
|---|
| Issue of multi-channel hidden terminal | NA | Very less | No | No | No |
| Control channel overhead | NA | Less | High | High | Very High |
| More than one data frame in a handshake | No | Yes | No | Yes | Yes |
| Number of transceivers | 1 | 1 | 1 | 1 | 1 |
| Exclusive control channel needed | NA | Yes | No | No | No |
| Channel selection * | Random | Last Used | Random | Last Used | Last Used |
| * Subject to availability of common channels. | | | | | |
Table 2.
Simulation Parameters.
Table 2.
Simulation Parameters.
|
Parameter | Configuration |
|---|
|
Packet payload | 8224 |
| PHY header | 192 bits |
| MAC header | 224 bits |
| Frame (Payload + PHY + MAC) | 8640 bits |
| RTS | 176 bits + PHY header |
| CTS | 128 bits + PHY header |
| ATS | 128 bits + PHY header |
| ACK | 304 bits |
| Channel Bit Rate | 1 Mbit/s |
| SIFS | 10 s |
| DIFS | 50 s |
| 32 |
| 1024 |
| Number of Stations | 5–70 |
| Channels available | 3, 4, 12 |
| Maximum simulation time | 10,000 frame time |
Table 3.
Physical host specification.
Table 3.
Physical host specification.
| Item | Specification |
|---|
| CPU | Intel Core i5-8250U CPU @ 1.60 GHz |
| Host Operating System | Windows 10 (64-bit) |
| Guest Operating System | Ubuntu 14.4 [51] |
| Virtualization Tool | VMware Workstation 14 |
| Virtual Machines | 1 |
| Main Memory | 20 GB |
Table 4.
Software specification.
Table 4.
Software specification.
| Item | Specification |
|---|
| Platform | Python 3.10.7 |
| Dependencies | NumPy, Matplotlib |
| Data Analysis | MATLAB R2022a, Microsoft Excel |
Table 5.
Factors and levels for MMAC performance study.
Table 5.
Factors and levels for MMAC performance study.
| Factors\Levels | 1 | 2 | 3 | 4 | 5 |
|---|
| Protocols | AMMAC | BiMMAC | SA-MMAC | E-SA-MMAC | Max-E-SA-MMAC |
| Number of Channels | 3 | 4 | 12 | | |
| Number of Stations | 5 | 25 | 45 | 65 | |
Table 6.
ANOVA for normalized throughput.
Table 6.
ANOVA for normalized throughput.
| Component | Sum of Squares | % Variation | Degree of Freedom | Mean Square |
|---|
| y | 860.0205 | | 60 | |
| … | 599.9794 | | 1 | |
| … | 260.0411 | 100% | 59 | |
| Main Effects | 203.7815 | 78.36% | 9 | 22.6 |
| No. of Stations | 53.6673 | 20.64% | 3 | |
| MMAC Protocols | 4.0952 | 1.57% | 4 | |
| No. of Channels | 146.019 | 56.15% | 2 | |
| First Order Interactions | 52.564 | 20.20% | 26 | 2 |
| Stations*Protocols | 1.8193 | | 12 | |
| Stations*Channels | 46.0823 | | 6 | |
| Protocols*Channels | 4.6624 | | 8 | |
| Second Order Interactions | 3.6956 | 1.40% | 24 | 0.2 |
| Stats*Proto*Channels | 3.6956 | | 24 | |
Table 7.
ANOVA for Jain’s Fairness Index.
Table 7.
ANOVA for Jain’s Fairness Index.
| Component | Sum of Squares | % Variation | Degree of Freedom | Mean Square |
|---|
| y | 31.1306 | | 60 | |
| … | 30.3636 | | 1 | |
| … | 0.767 | 100% | 59 | |
| Main Effects | 0.6838 | 89.10% | 9 | 0.1 |
| No. of Stations | 0.1556 | 20.29% | 3 | |
| MMAC Protocols | 0.4501 | 58.68% | 4 | |
| No. of Channels | 0.078 | 10.17% | 2 | |
| First Order Interactions | 0.0649 | 8.50% | 26 | 0.0025 |
| Stations*Protocols | 0.0192 | | 12 | |
| Stations*Channels | 0.0095 | | 6 | |
| Protocols*Channels | 0.0362 | | 8 | |
| Second Order Interactions | 0.0183 | 2.40% | 24 | 0.00076 |
| Stats*Proto*Channels | 0.0183 | | 24 | |
Table 8.
ANOVA for Channel Access Delay.
Table 8.
ANOVA for Channel Access Delay.
| Component | Sum of Squares | % Variation | Degree of Freedom | Mean Square |
|---|
| y | 904,502.3 | | 60 | |
| … | 550,405.2 | | 1 | |
| … | 354,097 | 100% | 59 | |
| Main Effects | 302,778.4 | 85.50% | 9 | 33,642 |
| No. of Stations | 197,759.6 | 55.85% | 3 | |
| MMAC Protocols | 4207.245 | 1.19% | 4 | |
| No. of Channels | 100,811.6 | 28.47% | 2 | |
| First Order Interactions | 50,000.7 | 14.10% | 26 | 1923.1 |
| Stations*Protocols | 860.6436 | | 12 | |
| Stations*Channels | 47,618.91 | | 6 | |
| Protocols*Channels | 1521.139 | | 8 | |
| Second Order Interactions | 1317.925 | 0.40% | 24 | 54.9 |
| Stats*Proto*Channels | 1317.925 | | 24 | |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}