1. Introduction
Higher data rates and energy efficiency are the core goals when designing new chaos-based communication systems. These goals originate from different aspects, like introducing the new communication standards (4G&5G) and the new challenges related to spectrum distribution to enable massive numbers of devices to access the network. Chaos-based systems, used as spread spectrum communication systems, were proven to be a great candidate for communications of IoT devices that constitute a considerable portion of the newly introduced standards [
1].
In this vein, among the significant motives for improving chaos-based systems is the inherent limitations of non-coherent chaos-based systems and the rapid development of new methods that can profit the design of new highly performing chaos-based schemes. In the literature, the non-coherent scheme called Differential Chaos Shift Keying (DCSK) [
2] has received significant attention in developing new chaos-based schemes, given its simple detection structure and its proven ability to mitigate the effect of fading channels [
3]. It is also one of the most adaptive schemes and has been extensively studied over the last two decades and has seen numerous upgrades in its basic symbol structure. In this sense, various signal processing approaches have been developed to improve its data rate, spectral efficiency, transmit energy efficiency, and Bit-Error-Rate (BER). Among the most notable emerging modulation schemes, index modulation has been primarily explored, given its potential to encode data more optimally and therefore ameliorate the performances of DCSK systems. Index modulation (IM) was first studied for Orthogonal Frequency Division Multiplexing (OFDM) in [
4], where it was shown that IM could be used for more than just the transmit antennas of MIMO systems. IM was then applied to DCSK and Short Reference DCSK (SR-DCSK) using walsh codes in [
5] which showed that the application of Code-Index Modulation (CIM) results in a considerable performance enhancement. Walsh codes are combined with a natural number-based mapping method in [
6] to improve the data rate of the simple Code-Index Modulation DCSK (CIM-DCSK) while using the same resources. A combination of multiple modulation techniques, such as OFDM, vector modulation, and index modulation, has been proposed as a method for improving the data rate and spectral efficiency of chaos-based systems. The data rate was addressed in [
7] with the introduction of superposition coding to Pulse-Position-Modulation DCSK (PPM-DCSK) to enhance multi-user download rates. Permutation index differential chaos shift keying (PI-DCSK) and differential permutation index differential chaos shift keying (DPI-DCSK) modulations were presented in [
8,
9], where a permutation is used to encode additional data with a list of codes referring to a series of chaotic references. Sparse codes were used similarly to achieve higher spectral efficiency for the Multi-carrier DCSK systems in [
10]. In [
11], time-reversal transform is combined with the DCSK design to improve the BER and spectral performances given a land mobile satellite channel model. According to [
12], optimal finger selection based on a genetic algorithm can be used to enhance the performance of the MMSE receiver. Orthogonal chaotic generators (OCG) were combined with Walsh codes in [
13] to enable multi-user transmissions and achieve higher spectral efficiency than the DCSK systems. General Carrier Indexing (GCI), which uses carrier indexing in a more general and arbitrary form to reduce the number of indexes required for carriers and data bits, was used in [
14] to provide higher spectral efficiency than conventional index-based DCSK systems. Combining M-ary modulation with index modulation and multi-carrier transforms in [
15] increased data rate but at the expense of much higher complexity. Amplitude Phase Shift Keying (APSK) was applied instead of Quadrature Amplitude modulation (QAM) to the DCSK scheme in [
16] in order to enhance the Peak-to-Average Power Ratio (PAPR) and the robustness against channel estimation errors. The authors in [
17] used M-ary phase shift keying (MPSK) in combination with parallelly concatenated index modulation. They integrated it with carrier interferometry (CI) codes into the OFDM-DCSK to reach a satisfactory quality of service (QoS) and low PAPR for all users. Precoding was used in [
18] to encode the data of Multi-Carrier M-ary Chaotic Vector Cyclic Shift Keying (MC-M-CVCSK) to combat the noise and interferences caused by the channel.
Meanwhile, one of the emerging and most efficient signal processing techniques for improving communication systems’ throughput is Faster than Nyquist (FTN), which defies the limit set by Nyquist for inter-symbol spacing, thus resulting in data rate improvements. The approach has been extensively studied for possible time and frequency domains superpositions [
19]. In [
20], the FTN approach is proven to provide an increased data rate of 23%, when the symbol spacing is at a specific limit, named the Mazo limit, where the reduction in the spacing between symbols does not affect the BER performance. The reduction can be applied in time and frequency, providing two degrees of freedom for enhancing the performance of communication systems. FTN signaling has been studied extensively, especially for optimal detection of signal-spacings lower than the Mazo-limit [
21], while traditional detection algorithms, like the Maximum Likelihood Sequence Estimation (MLSE) and Viterbi algorithm, provide decent performance for a limited decrease in sampling rates, their detection optimality is limited to a short increase of symbol rate. In addition, they induce an additional computational complexity for high-order constellations. New algorithms have been proposed to tackle the computation time issue. For instance, in [
22], to achieve a sub-optimal detection while maintaining a polynomial solving time, the sequence estimation is based on the semidefinite relaxation (SDR) technique to achieve a sub-optimal detection. In [
23], output-retainable convolutional codes (ORCCs) were used for channel memorization to reduce the decoding complexity. A new approach based on a deep learning-assisted sum-product detection algorithm (DL-SPA) was presented in [
24] for faster detection convergence.
Moreover, lately, the key research goals on FTN-based modulations focus on reaching higher orders of magnitude in the frequency domain, designing optimal filters in the time domain, Inter-Symbol-interference (ISI) and Inter-Carrier-Interference (ICI) reduction, and the elaboration of a general FTN theory. A comparative analysis of Frequency-domain equalization (FDE) and time-domain equalization (TDE) was carried out in [
25] where it was shown that TDE outperforms FDE, especially for ISI elimination; however, this comes at the cost of increased complexity. In [
26], FDE was improved using Expectation Propagation (EP) to achieve a performance similar to that of the Bahl Cocke Jelinek and Raviv (BCJR) receiver [
27] with less complexity. However, all related FTN works introduce additional algorithmic or hardware-related computation requirements. To date, no simple yet efficient modulation scheme has been introduced in the literature. More complexity is expected to be introduced going forward with the research on a generalized FTN theory and its optimal detection. The main goal of this paper is to introduce a design that combines the architectural simplicity of DCSK and the benefits of a transform that enables a spectral gain namely, FTN. Accordingly, the spectrum would be used less, depending on the level of the filtering rate, ranging from a maximum value at Nyquist rate (
) to zero (
), for which no spacing would be introduced between symbols. This would enable spectral gains ranging from zero to 100% depending on the BER requirements.
This paper introduces a novel multi-user FTN-based DCSK system where a combination of FTN filtering and non-coherent detection allows better usage of the available spectrum for the DCSK systems. Moreover, the new system enables multi-user access using the same mechanism that enables spectral efficiency gain, i.e., the FTN sampling. The MU-FTN-DCSK enables multi-user access via different sampling rates with a gain in spectral efficiency for all the users simultaneously transmitting within the FTN regime. The BER results prove the system’s capabilities for various sampling rates and spreading factors. The contributions of this paper are listed as follows:
Designing the Multi-user Faster-Than-Nyquist system that enables access for users with different sampling rates, all transmitting in an FTN regime.
Derivation of the theoretical BER expression for the proposed system over Multi-path Rayleigh Fading channels.
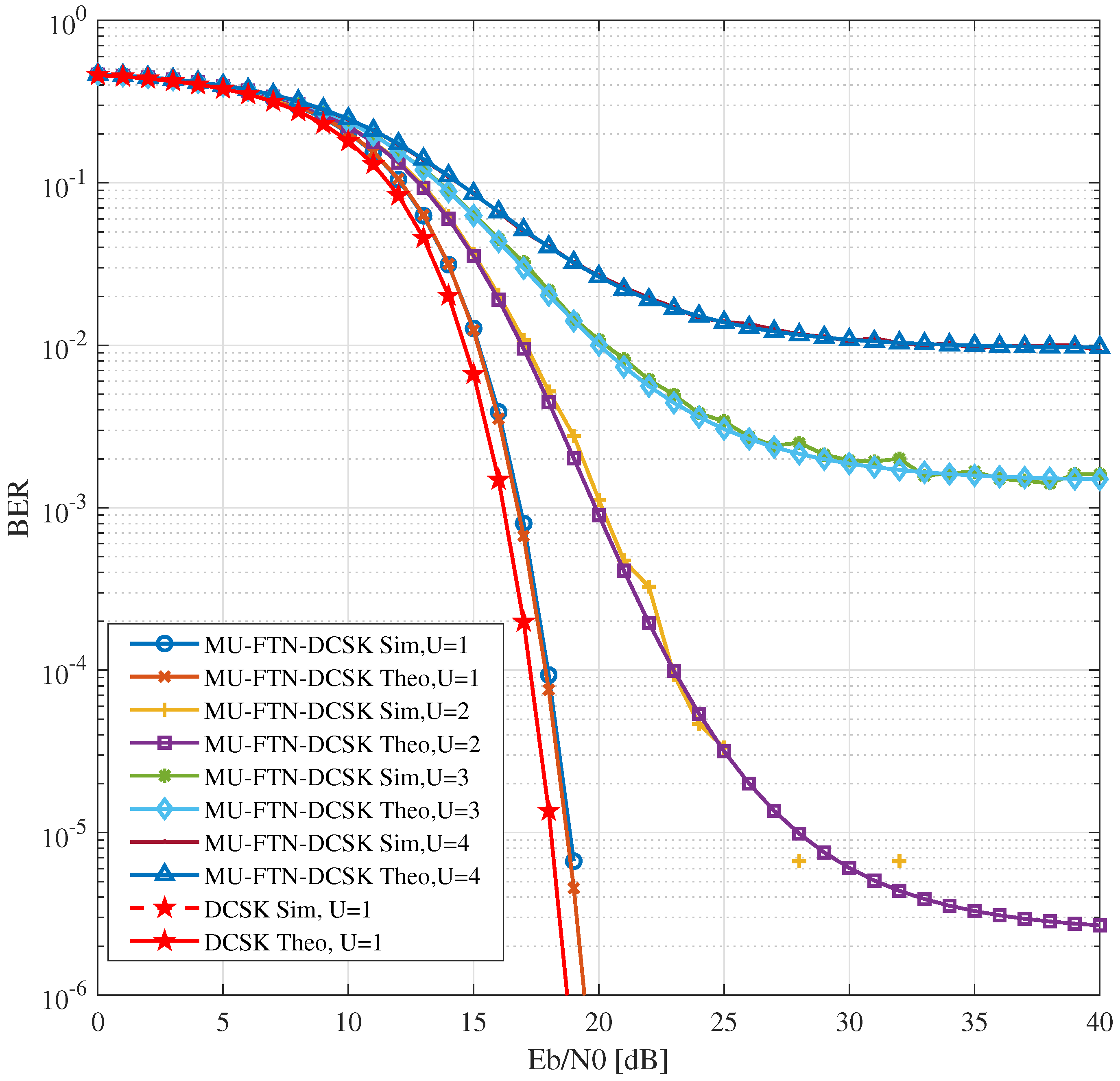
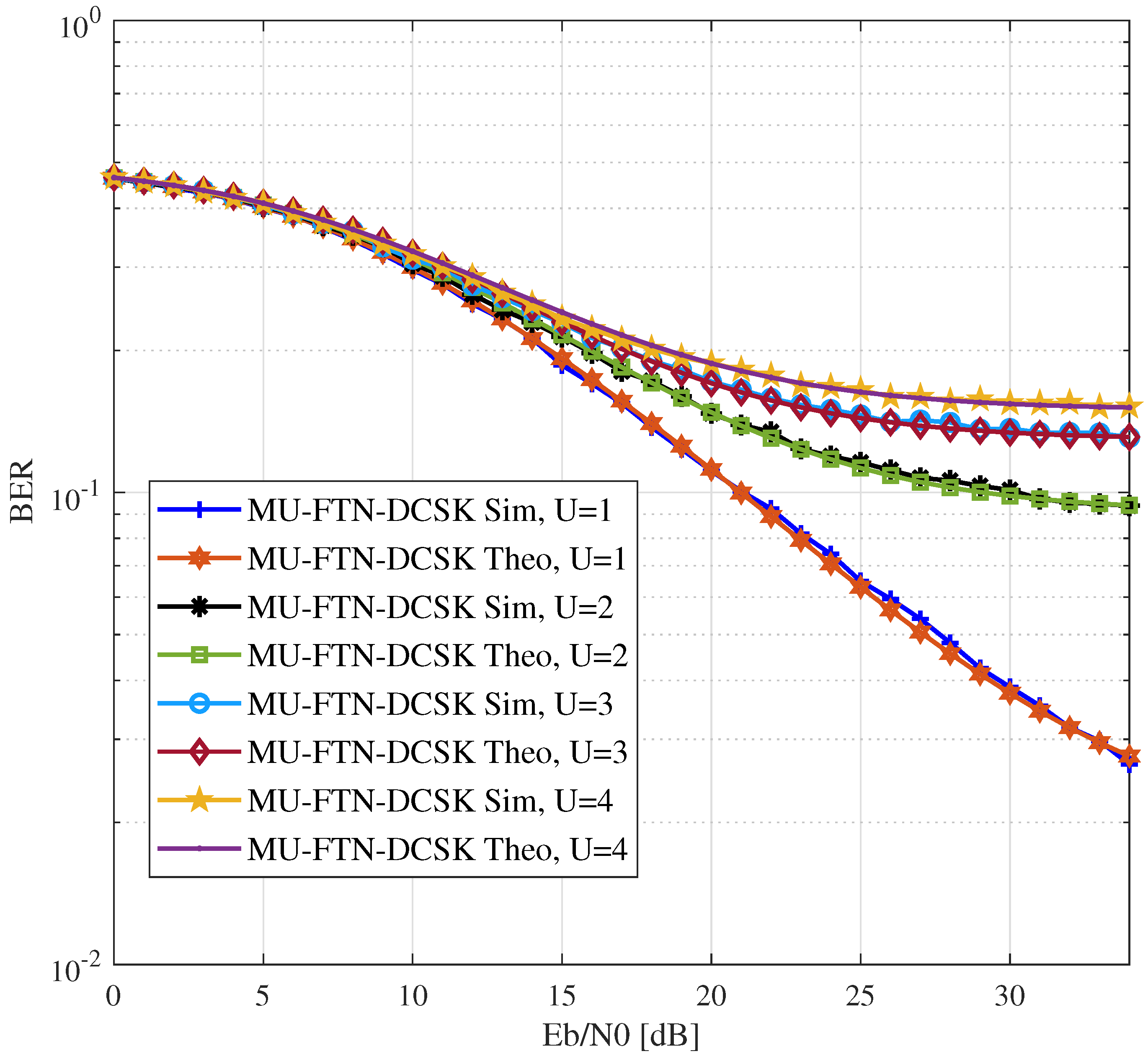
Performance analysis of the designed system, via monte-Carlo simulation, over the AWGN and Rayleigh fading channels for different system parameters and configurations.
The rest paper is structured as follows. In
Section 2, the MU-FTN-DCSK system is presented.
Section 3 derives the BER expressions of the system. In
Section 4, the simulation results of the MU-FTN-DCSK system are presented along with their analysis. The paper is concluded in
Section 5, where we highlight the most important findings related to the newly introduced system.
2. System Design
The FTN-DCSK system combines a sinc filter functioning at a sub-Nyquist sampling rate with the basic transmit-receive DCSK design. The system is described in this section, where the schematic and mathematical representations of the transmitted signals are provided. The FTN prospect reflects on the possibility of enabling filtering on sub-Nyquist rates, which reduces the separation between successive transmissions to less than the minimum distance guaranteeing orthogonality. The belief proceeding FTN was that such reduction would be disastrous on signal transmission following the theorems of Shannon and Nyquist for optimal filter design and sampling. It is only through the work of T.Mazo [
20] that this belief was questioned, where in their work, he proved that a 401 Hz/bit/s was sufficient for a sub-Nyquist filter to guarantee the same Euclidean distance offered by an ideal Sinc filter in regular orthogonal transmissions. As a result, with FTN, compared to a regular orthogonal pulse with a separation period
T, the Mazo limit is
= 0.802
T.
Moreover, the DCSK system is based on transmitting a chaotic sequence (reference) of length and its product with the data signal in two successive time slots. The detection is based on differential detection, where the incoming signal is delayed by . Then the product of the two sequences in the different time slots is taken, followed by a summation over the duration. Finally, the sign is taken to determine the transmitted data symbol.
2.1. FTN-DCSK
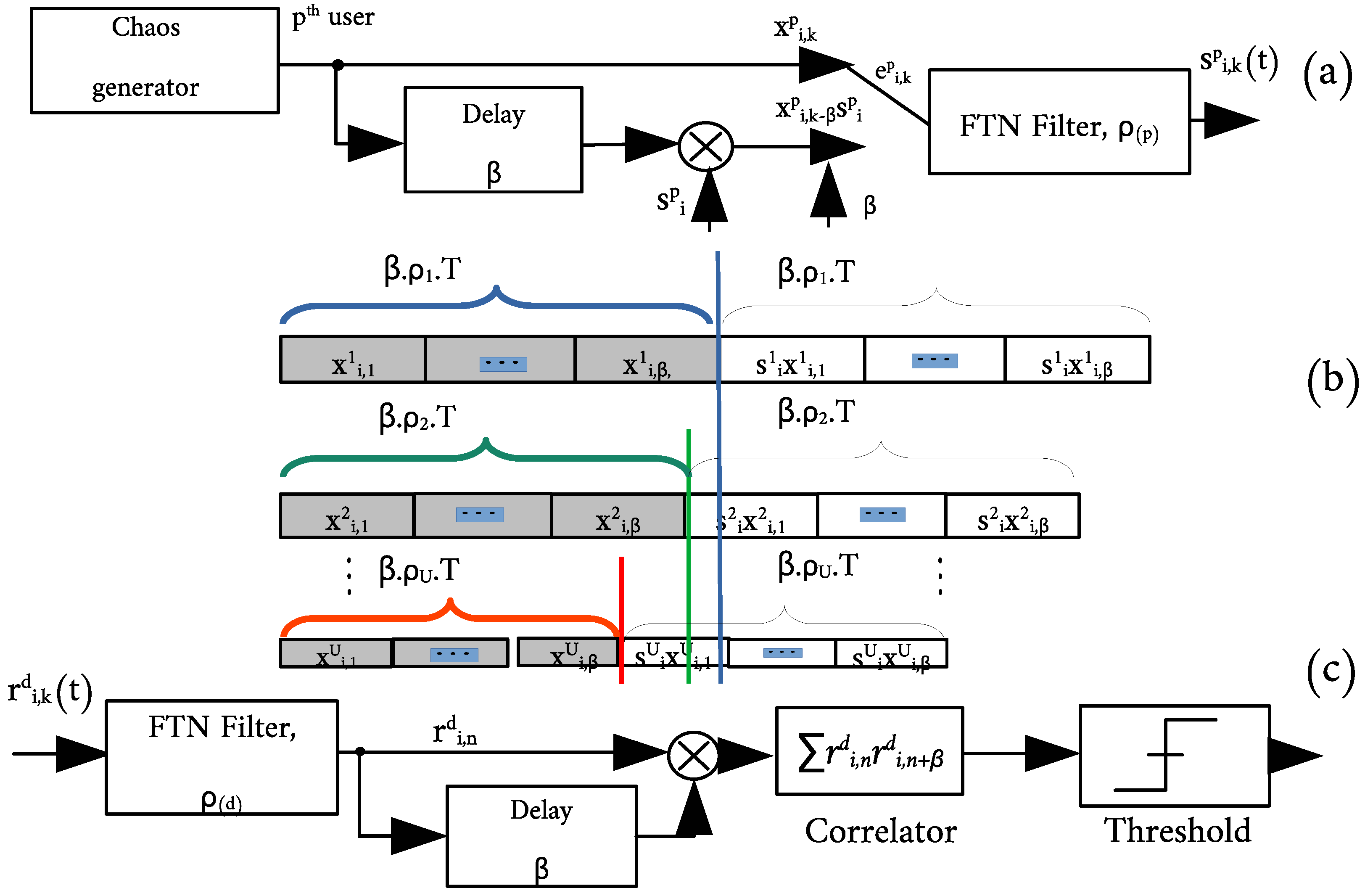
The FTN-DCSK system is constructed using a Sinc filter with a sub-Nyquist sampling rate to encode the chaotic sequence at the output of the DCSK system, as shown in the block diagram in
Figure 1a. We use the normalized Chebychev map for chaos generation
where
is the
ith state for
ith symbol and
k is the index of chaotic sample, for the
pth user, with a spreading factor
for the reference and data bearing signals, and the
are the data bits. We use a normalized Sinc filter
to encode the chaotic sequences with a different sampling parameter
for every user, expressed as
where
k is the chaotic sample being encoded,
is the sampling parameter for
pth user, and
T is the typical Nyquist period. The multiplication by the sampling parameter’s square root is for normalizing the filters at both ends of the transmission. As a result, the continuous-time transmitted signal
(t), for the
pth user, has the following form
For detection, the Sinc filter is first applied at the receiver, followed by the DCSK detection scheme. The multi-user system design is shown in
Figure 1, where a different FTN sampling parameter is used for each user. The detection is based on selecting the desired user’s signal by passing the combined signal, summed in the channel, through the filter with the designated sampling parameter
, followed by the delay loop and the product and summation blocks.
The index
d is used to separate the symbol of the desired user from the rest of the users transmitting in the same channel. Hence, the received signal
during
samples, for the desired user with a sampling parameter
, corresponding to the
kth sinc pulse of the
ith transmitted symbol, is expressed as
where
U is the total number of users,
is the
pth user’s channel coefficient over the
th channel tap, and
,
is the
th channel tap delay for the
th symbol. Similarly,
is the desired user’s channel coefficient over the
lth channel tap,
,
is the
lth channel tap delay for the
ith symbol,
is the floor operator, and
W is the noise signal.
The detection is based on applying the matched filter to the received signal
in order to retrieve the different
samples and is expressed as
〈,〉 is the dot product.
For filters with different sampling factors
at reception for the desired user and
for any random user with a different sampling parameter, the detection matrix is derived as follows,
by applying The Plancherel transform for integral substitution, we obtain
where
is the Fourier transform of the regular sinc filter. The Fourier transform is applied again with a variable change
, which gives
For the same sampling parameter
in transmission and reception, the dot product of the two vectors obtained at the output of the matched filters, as shown in [
28], is expressed as,
We consider a dissimilar multi-path Rayleigh channel model with
L paths and a PDF expressed as
where
is the channel gain and
is its standard deviation. The overall energy over a symbol duration is
here
is the energy level for the
lth path for both cases of similar and dissimilar power distribution over the channel paths.
The following assumptions are considered for transmission: (1) the coefficients of the channel are independent and identically distributed (iid); (2) the bit energy is constant over the symbol duration of length ; (3) the delay spread of the channel is neglected for the same reason, ensuring that the channel introduces no ISI, i.e., .
2.2. Spectral Efficiency
For a single user, the length of an MU-FTN-DCSK symbol is given as (2
). Hence, we obtain the percentage of spectral gain
expressed as,
The spectral gain is then simplified to the following expression
For the total spectral gain for
U users, we sum over the total number of users as follows
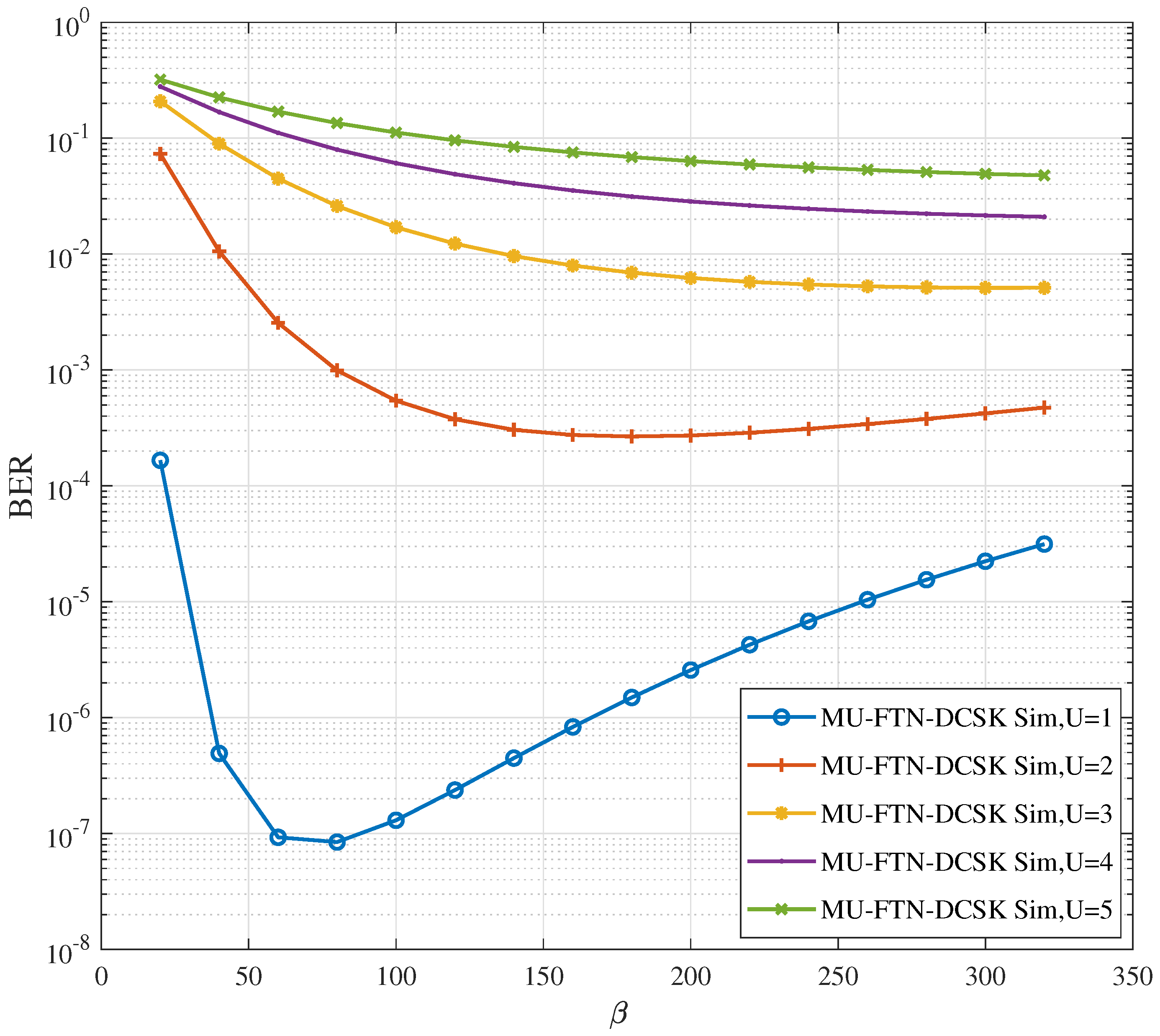
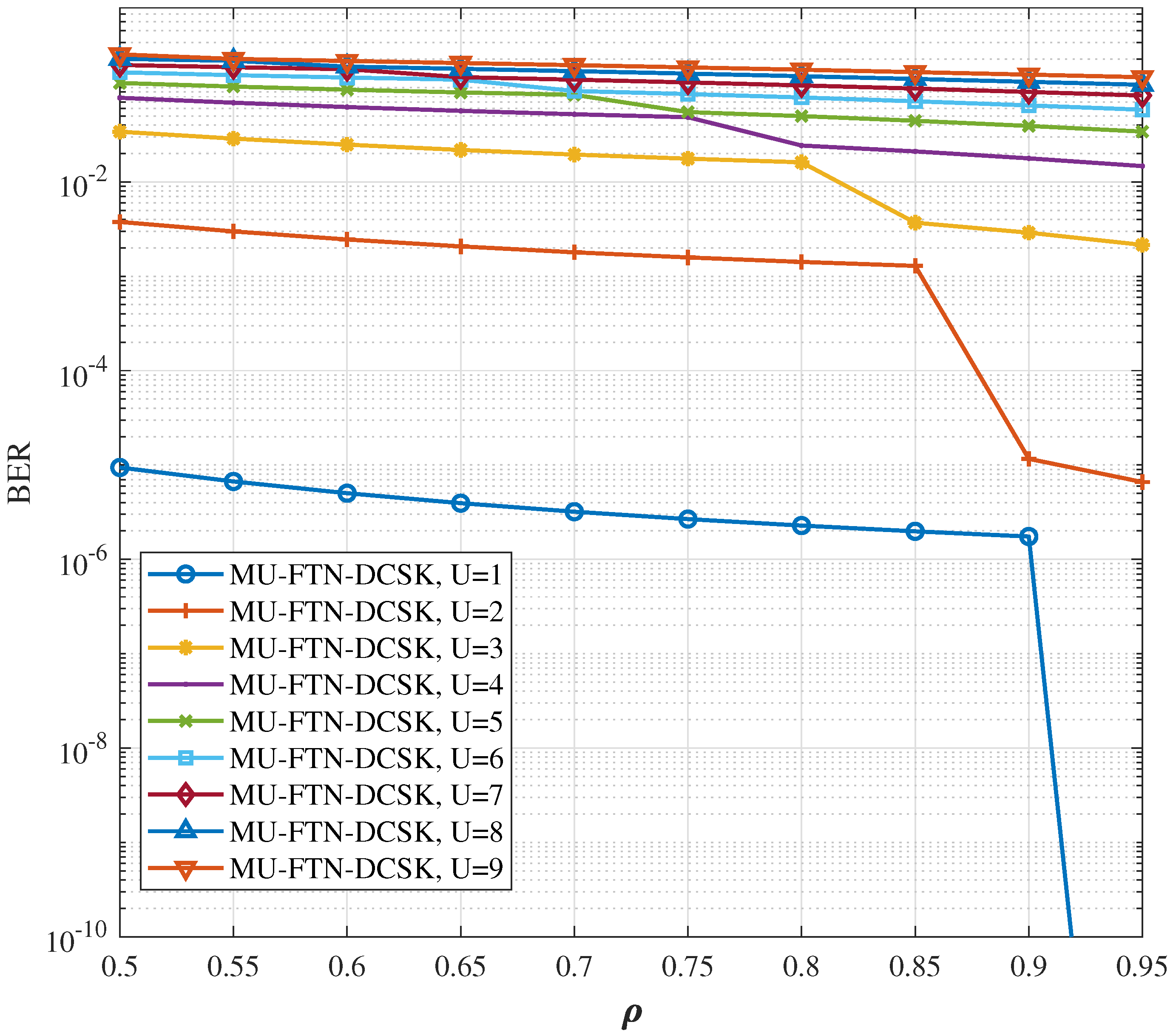
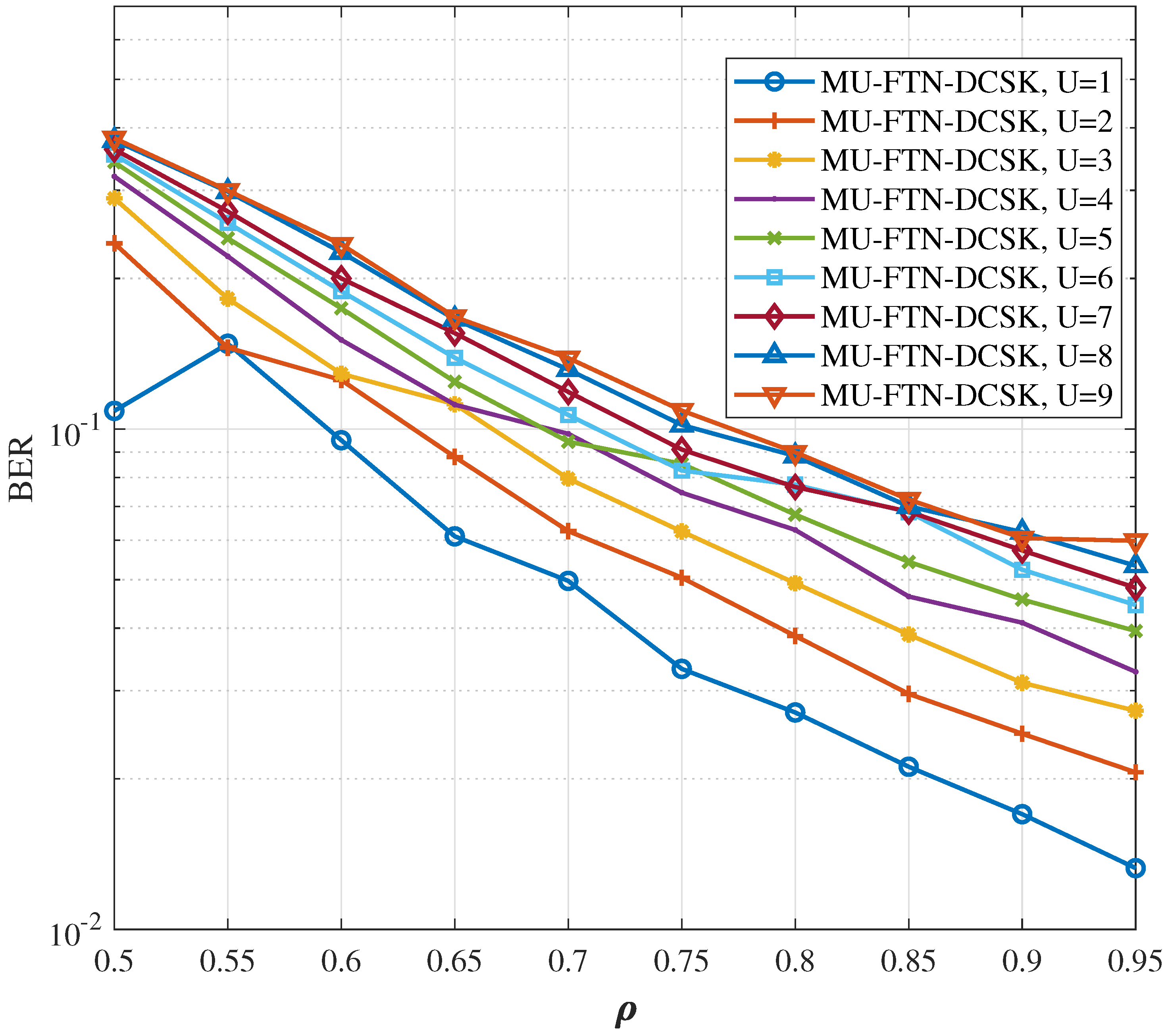
Given this expression, we know that the system’s spectral efficiency depends on the total number of users and their individual sampling parameters. Therefore, to reach a maximal spectral efficiency, one would have to increase the number of users to maximum while trying to minimize their sampling parameters concerning the desired BER performance.
3. Performance Analysis
This section derives the BER expression for the proposed MU-FTN-DCSK system over multi-path Rayleigh fading channels. Following the design presented in
Figure 1, the Probability Density Function (PDF) of the received signal follows an exponential distribution expressed as
where
is the channel gain,
is its averaged value, and
being the weight for the
ith symbol duration over the
lth path and is expressed as
Hence, considering [
28] (Eq. 3.3), the result in (
8), and the normalized filters for different users, the received signal
post filtering during the first
samples, i.e., the
nth sample of the reference signal, for the desired user with a sampling parameter
is expressed as:
is the noise signal received during the same
ith symbol duration. It is assumed that only two samples prior to and after the desired signal can influence it, and thus the value of
. Similarly, the value of
is used to express the
samples transmitted by any other random user asynchronously. The operator
in (
4) expresses the sampling of
sample at the moment of detection.
Similarly, the data-bearing signal, received during the second
samples is expressed by multiplying the signal of the desired user form (
16) by the data bits
.
Due to the asynchronous nature of the system, both the reference and data-bearing signals only assume the chaos in the expression of other users’ signals so that generality is not lost… The assumption does not impact the derivation of the BER expression from a statistical perspective since
. Hence, the decision variable for the desired user’s
ith transmitted symbol for the MU-FTN-DCSK system is derived as,
The desired signal is then the product of the chaotic terms having the index of the desired user
d and the filter with the desired user’s sampling parameter
, resulting in the following signal
The cross-product of the chaotic terms in (
17) results in interferences expressed as
The first term in (
19) is the ISI, which occurs because of the reduced distances between samples due to the nature of the FTN filter. The remaining part is the inter-user interference (IUI) for different chaos generators and sampling parameters. The noise term is expressed as
In this paper, it is assumed that the sum of
chaotic samples is equal to,
Hence, the mean value of the desired signal is given as
Since the chaotic sequences are generated with zero mean (
) and using (
21), the variance of the individual chaotic chips is given as,
Hence, the variances of the interference terms in (
19) can be split as the ISI, with variance
, the interference to the desired user, with variance
, and the interference among all other users, with variance
as
The noise variance is equally affected by the sinc filter at the reception. The result shown in [
28] (Eq. 3.3) is valid for our case since the noise is only affected by the filter of the desired user at detection. As a result, the power of the noise is reduced by a factor of
for the sampling parameter
as:
where
is the standard deviation of the noise. Henceforth, for a noise with a double-sided power spectral density
, the variance of the noise terms is expressed as
For non-coherent chaos-based communications in regular Nyquist transmissions, the covariance is often neglected while expressing variances, given the low cross-correlation between chaotic sequences when time delayed or for different chaos generators,
However, in sub-Nyquist transmissions with the introduction of the terms as seen in the derivation of the variances and the expectation, covariances are introduced in the formulation of the BER expression. Here, we explore the different covariances that may occur in this scenario of multi-user chaos based transmission below the Nyquist rate.
For the Chebychev map [
29], we know that the joint PDF of two chaotic variables
and
, time delayed by
t, is expressed as
where
is the Chebychev polynomial for a variable
x expressed as
where
is the cosine function and
is the delta function.
The variance of a sum of dependent random variables
with weights
is known as [
30],
and the covariance is given as
Given that the chaotic sequences are generated with zero mean (
E(
) = 0), the covariance of two FTN filtered chaotic sequences is derived as
where
are two sub-Nyquist filters from two random users with different sampling rates. We use the joint PDF of two chaotic variables to compute the expectation
As a result, by injecting the expectation into (
32) and using the results from (7), the new covariance introduced by the FTN regime is expressed in terms of the detection matrix
as follows
This covariance occurs even in the absence of noise and for single-user cases, and is strictly inherent to the nature of the filters used for transmission/reception.
Finally, the overall BER expression of the MU-FTN-DCSK system over an AWGN channel is expressed identically to DCSK as
Hence, using the derived expressions of expectation and variances, the BER expression over the AWGN channel can be obtained by assuming unitary channel coefficients i.e.,
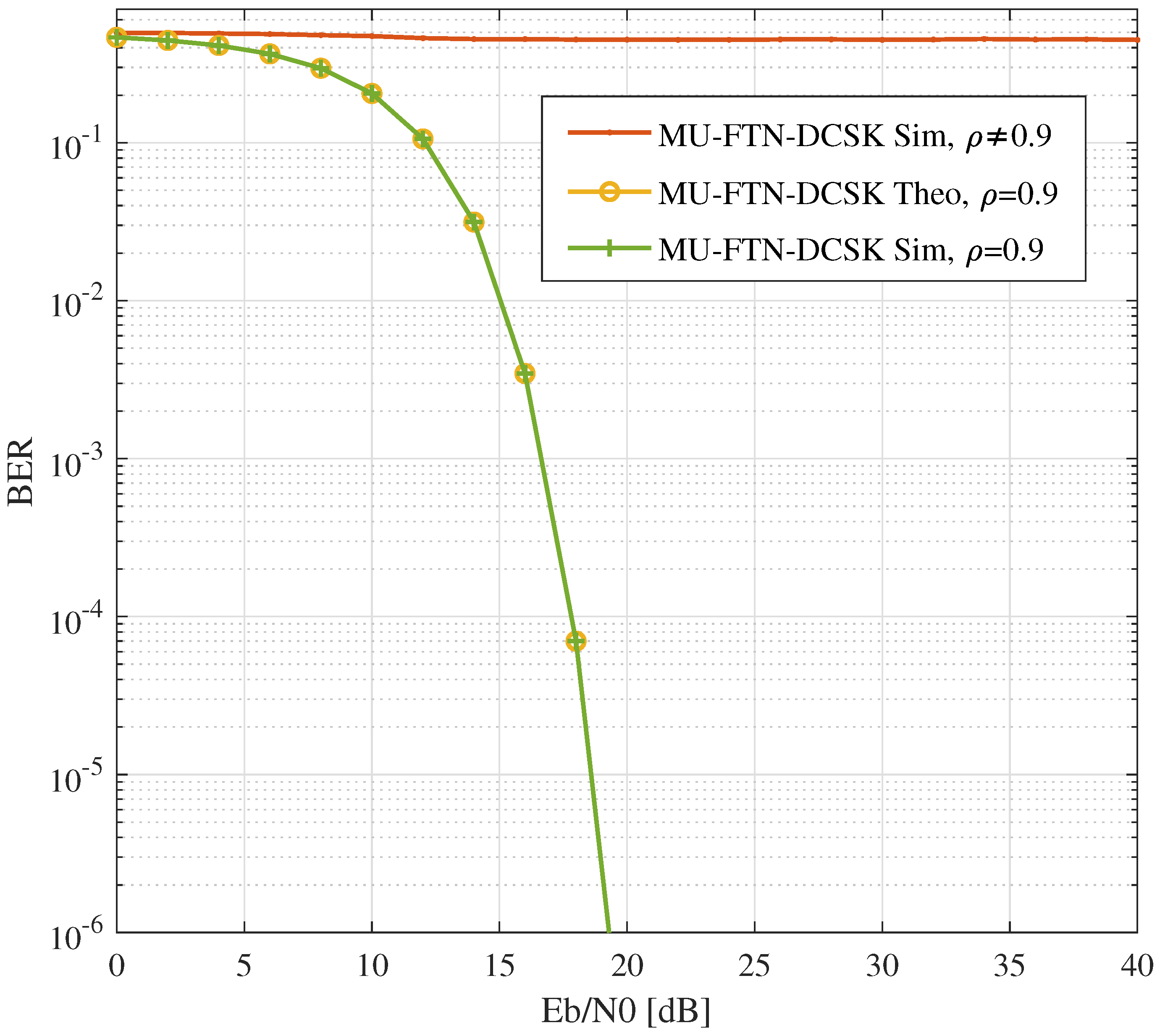
. Thus, the BER performance over multi-path Rayleigh fading channels is expressed as












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}